
Optimizing the Sampling Strategy for Future Libera Radiance to Irradiance Conversions †


Abstract

1. Introduction
2. Theoretical Background for Converting Direct Measurements to Energy-Relevant Quantities
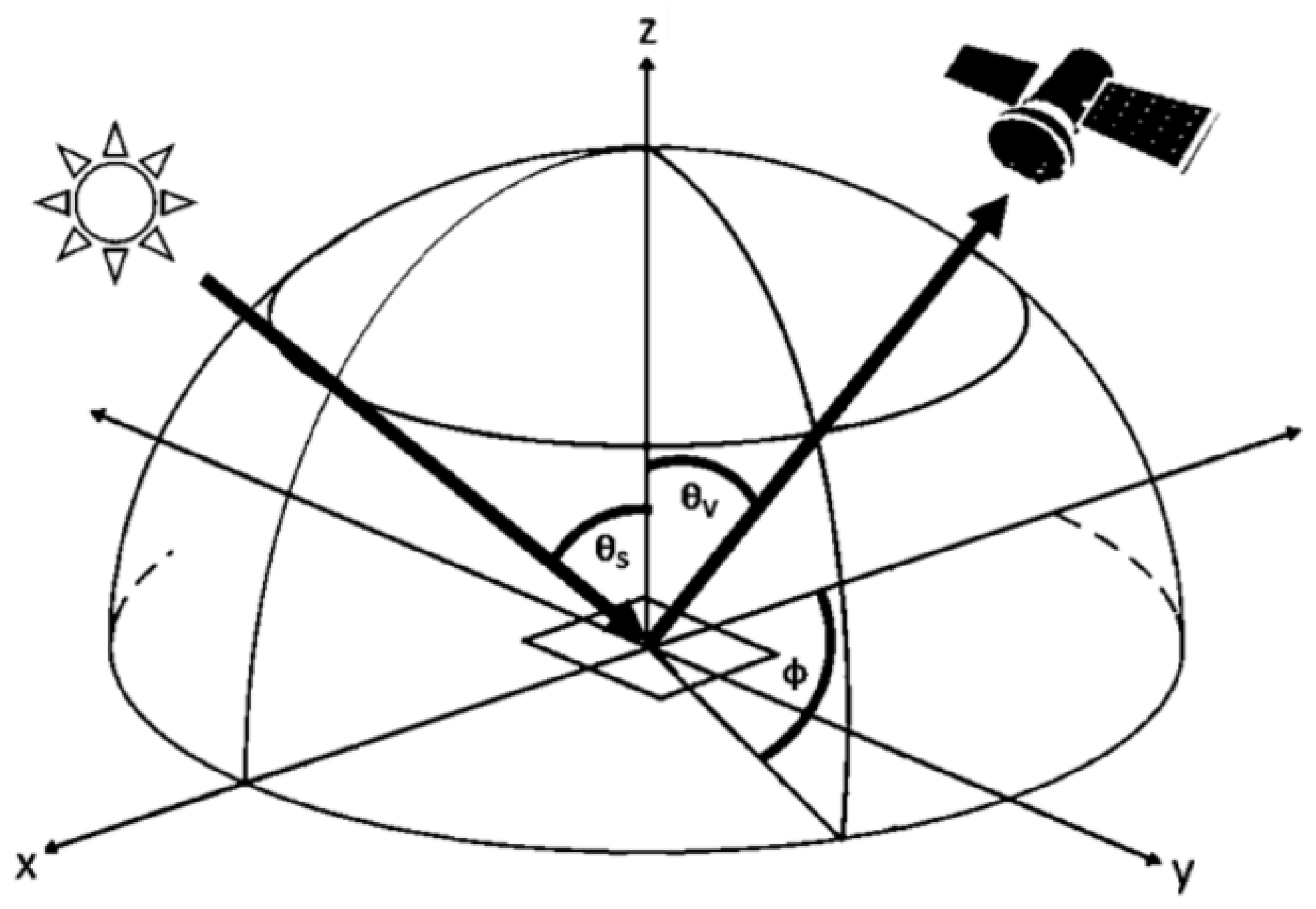
2.1. Anisotropic Factors
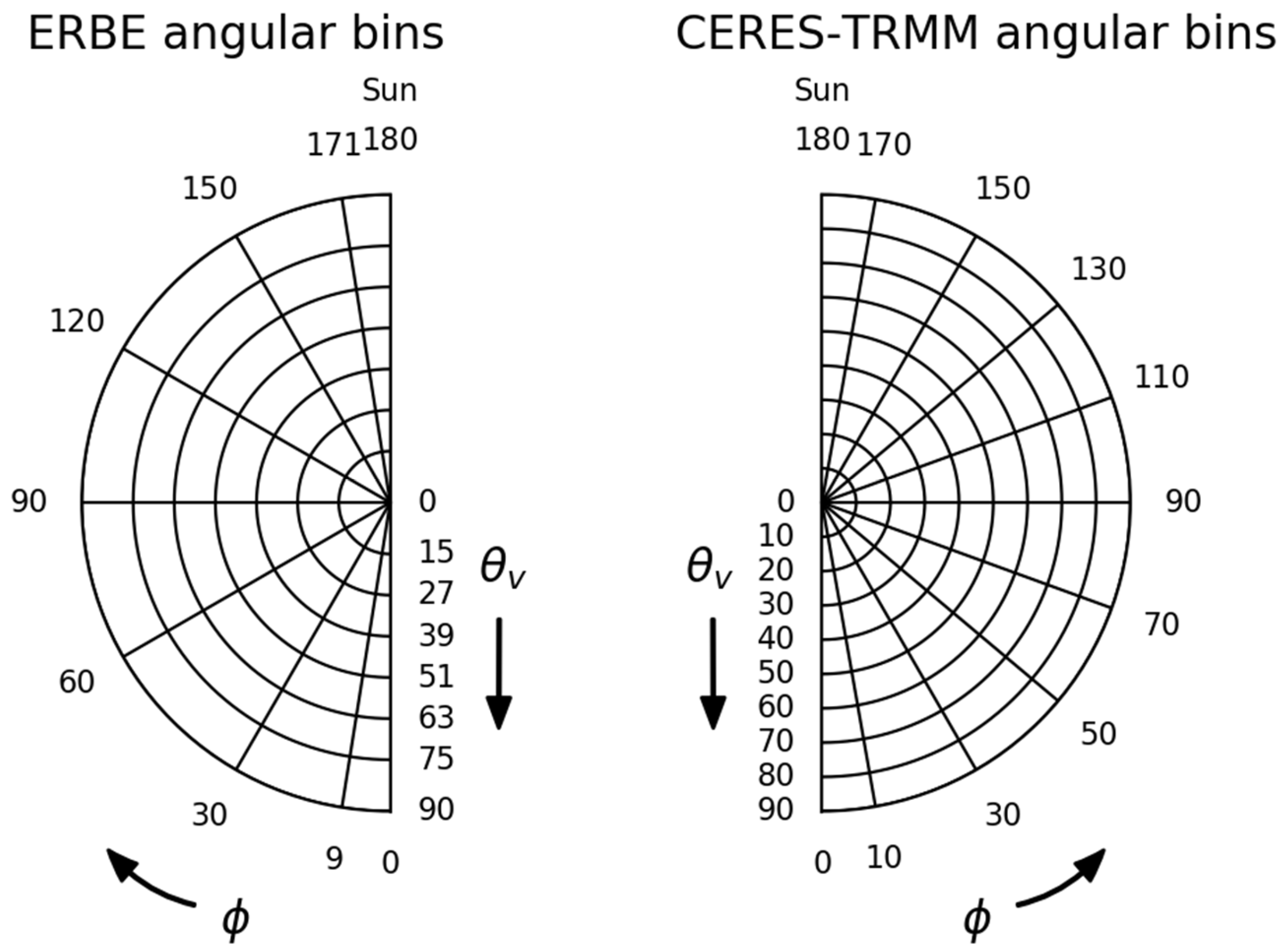
2.2. Scene and Angular Stratification
3. Data
4. Methodology
4.1. Methodology for the Impact of RAPS Cadence on Observed Space
4.2. Methodology for Rotational Azimuth Plane Scan (RAPS) Rate Analysis
4.3. Methodology for Bin-by-Bin Radiance Convergence-Based Analysis
5. Results and Discussion
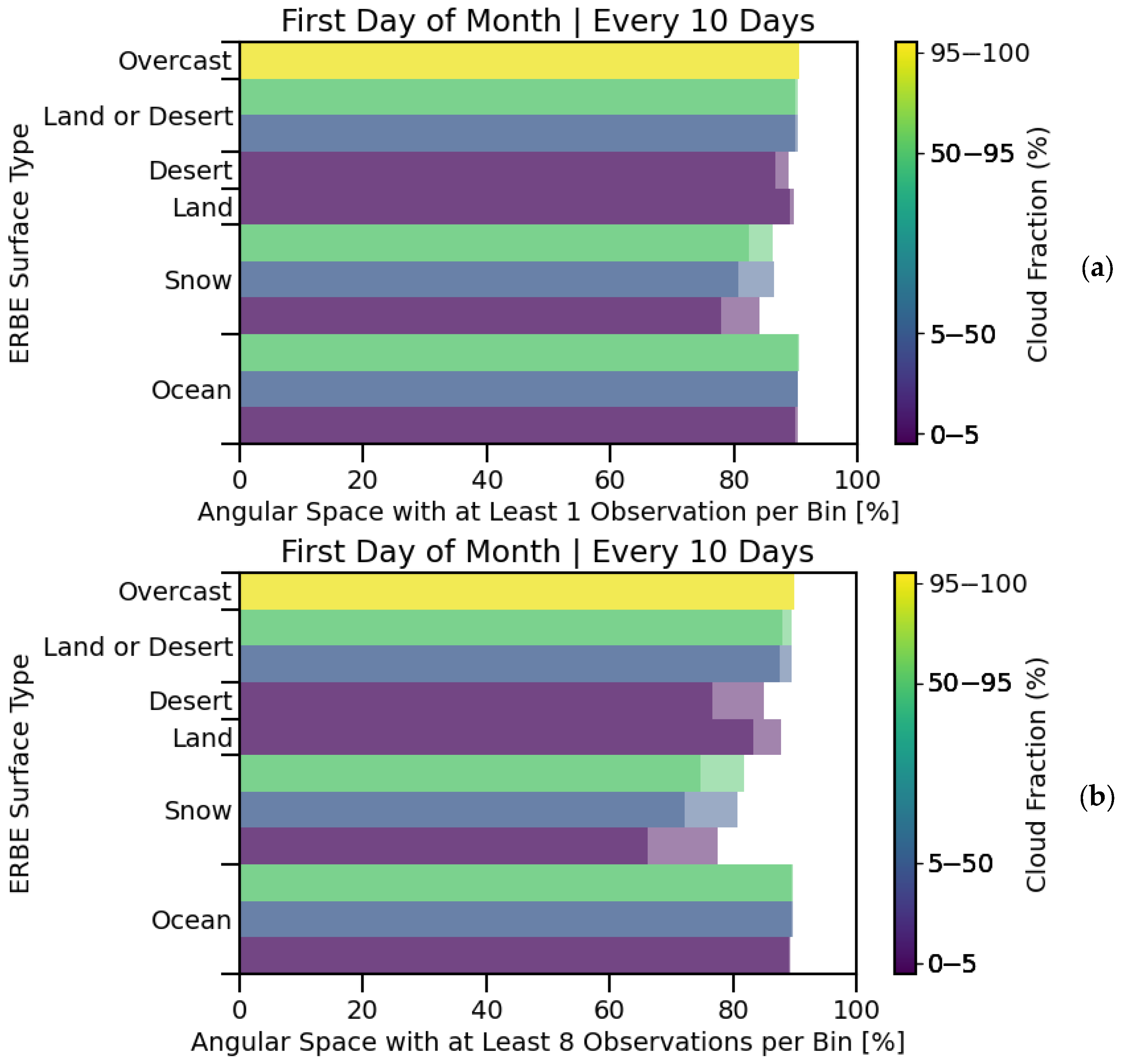
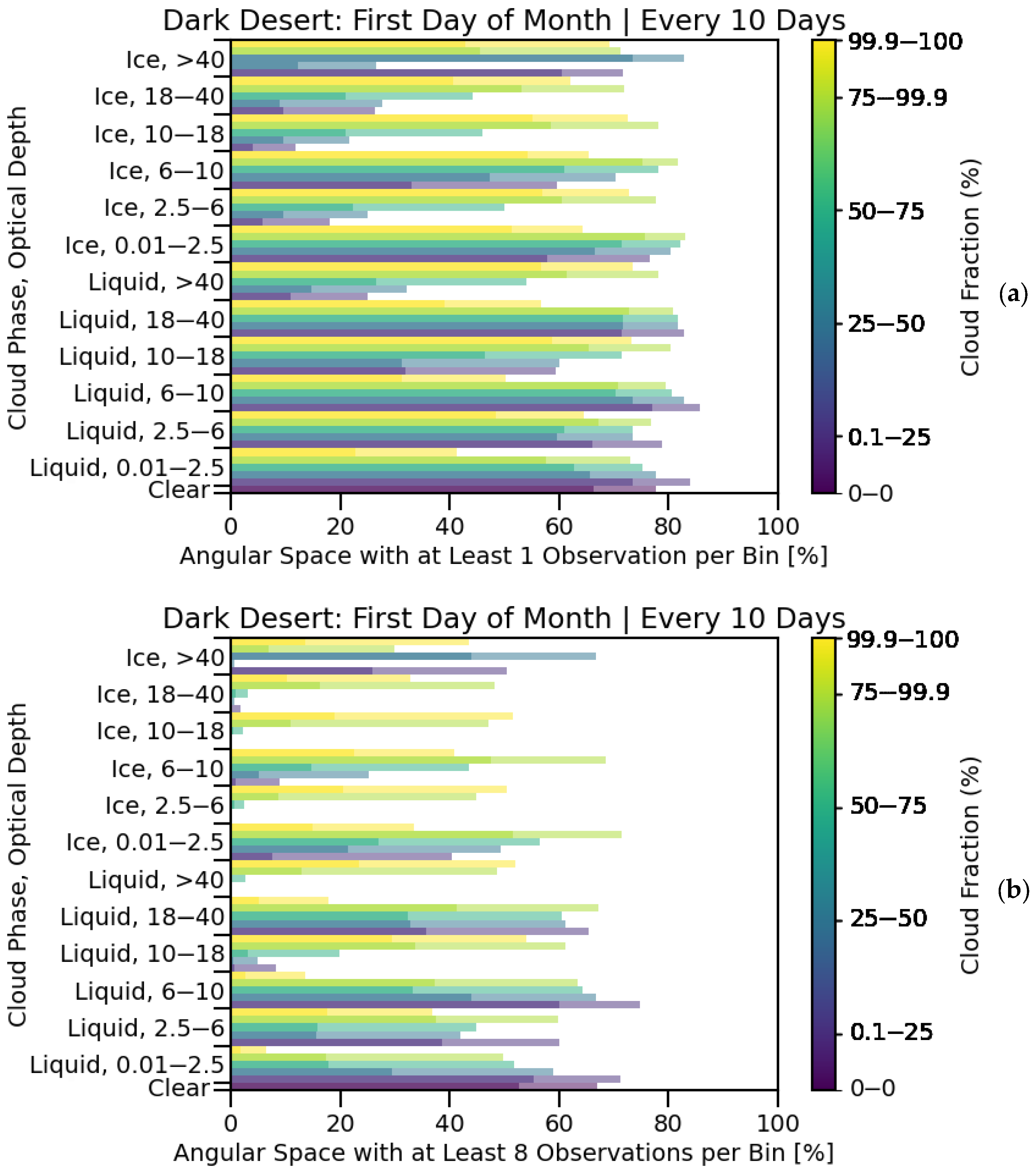
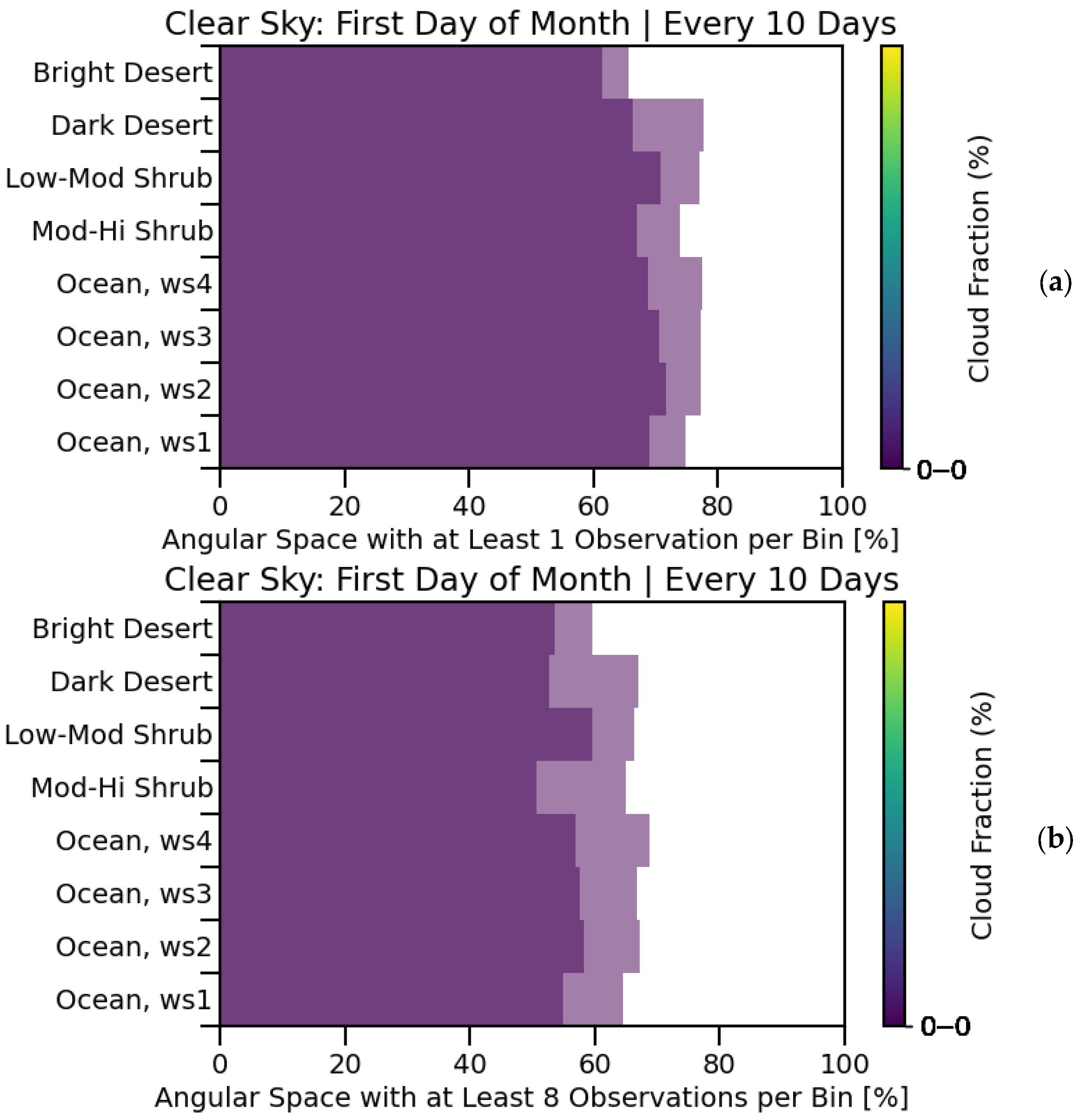
5.1. The Impact of Rotational Azimuth Plane Scan (RAPS) Cadence on Observed Space
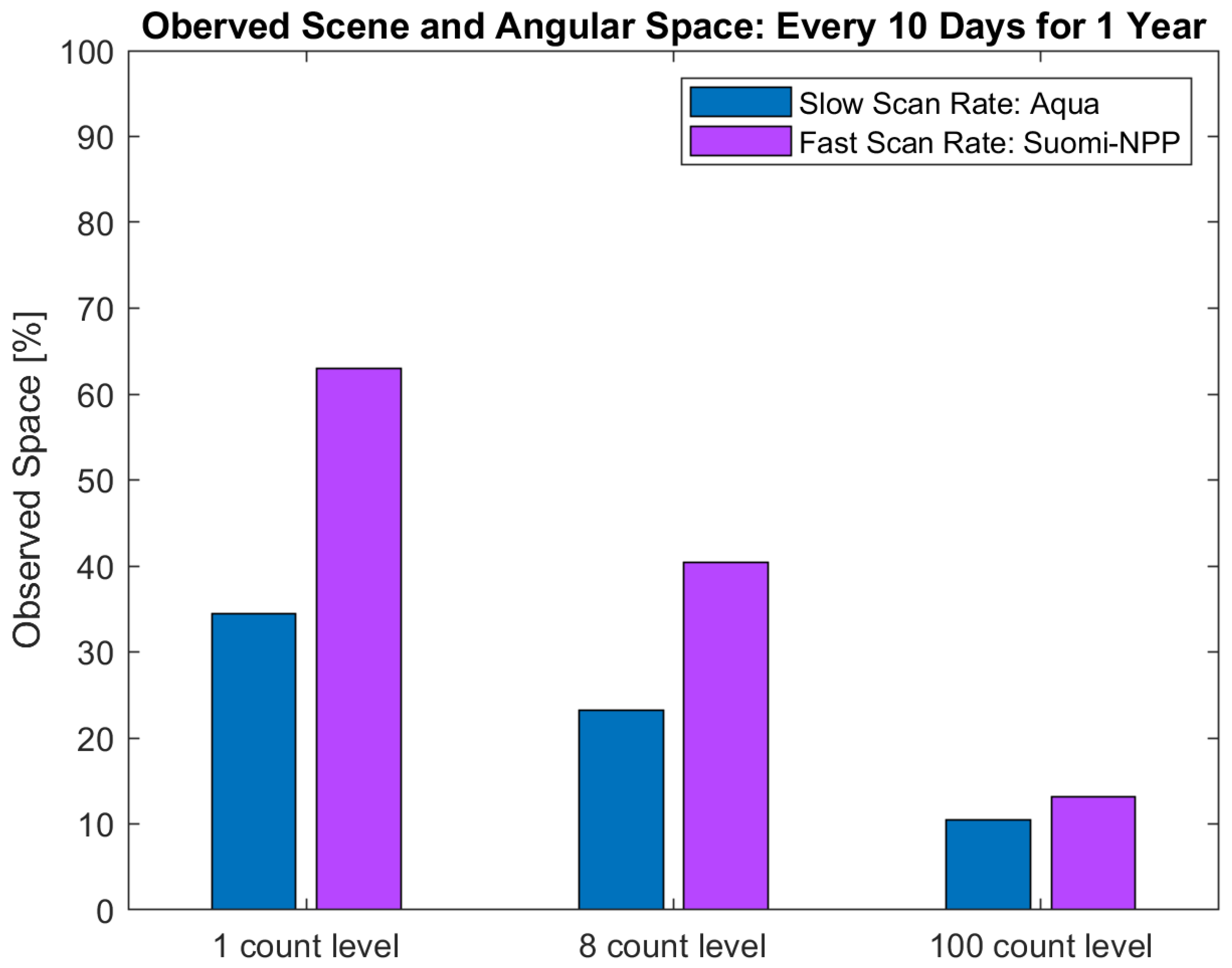
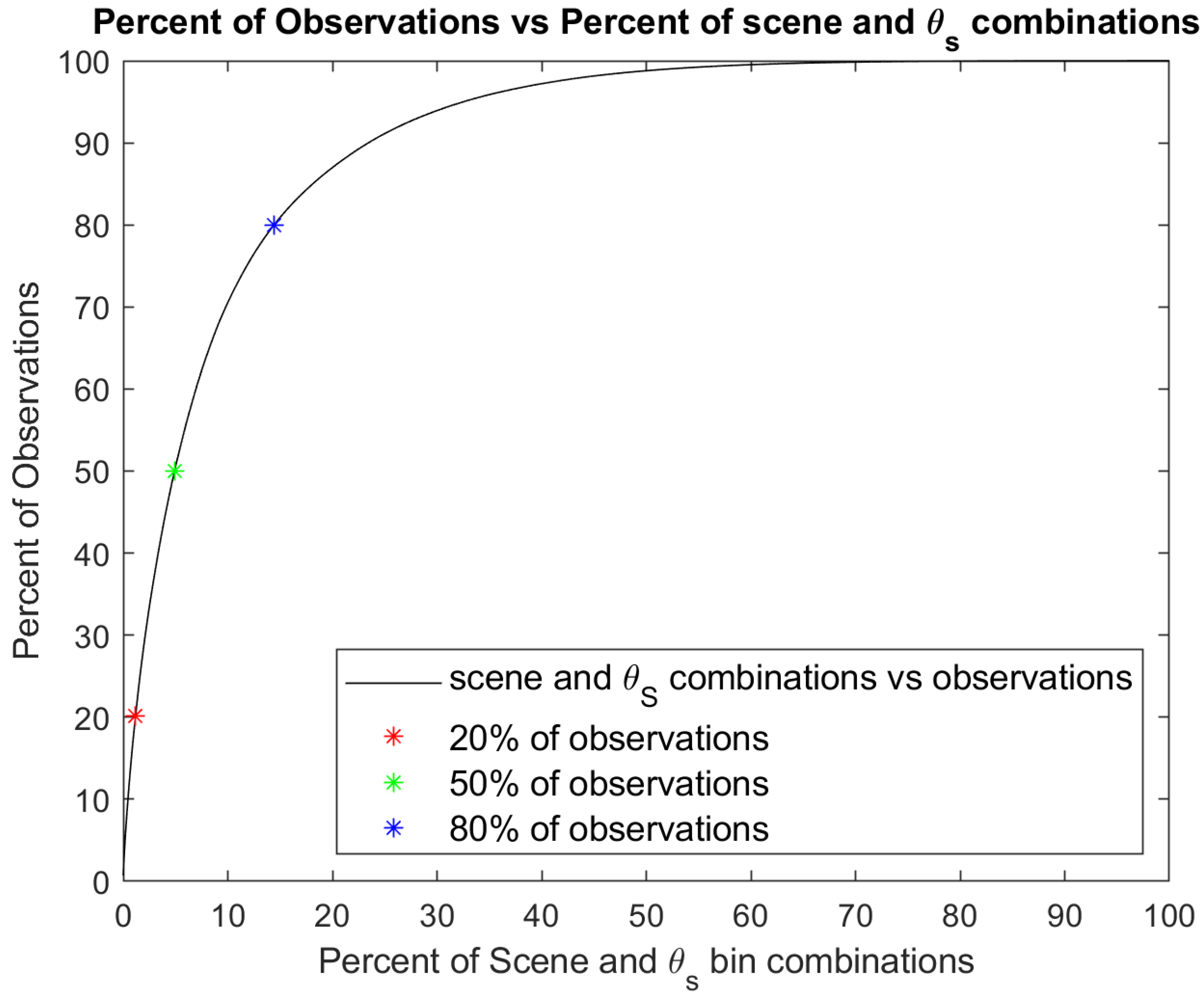
5.2. Rotational Azimuth Plane Scan (RAPS) Rate Analysis
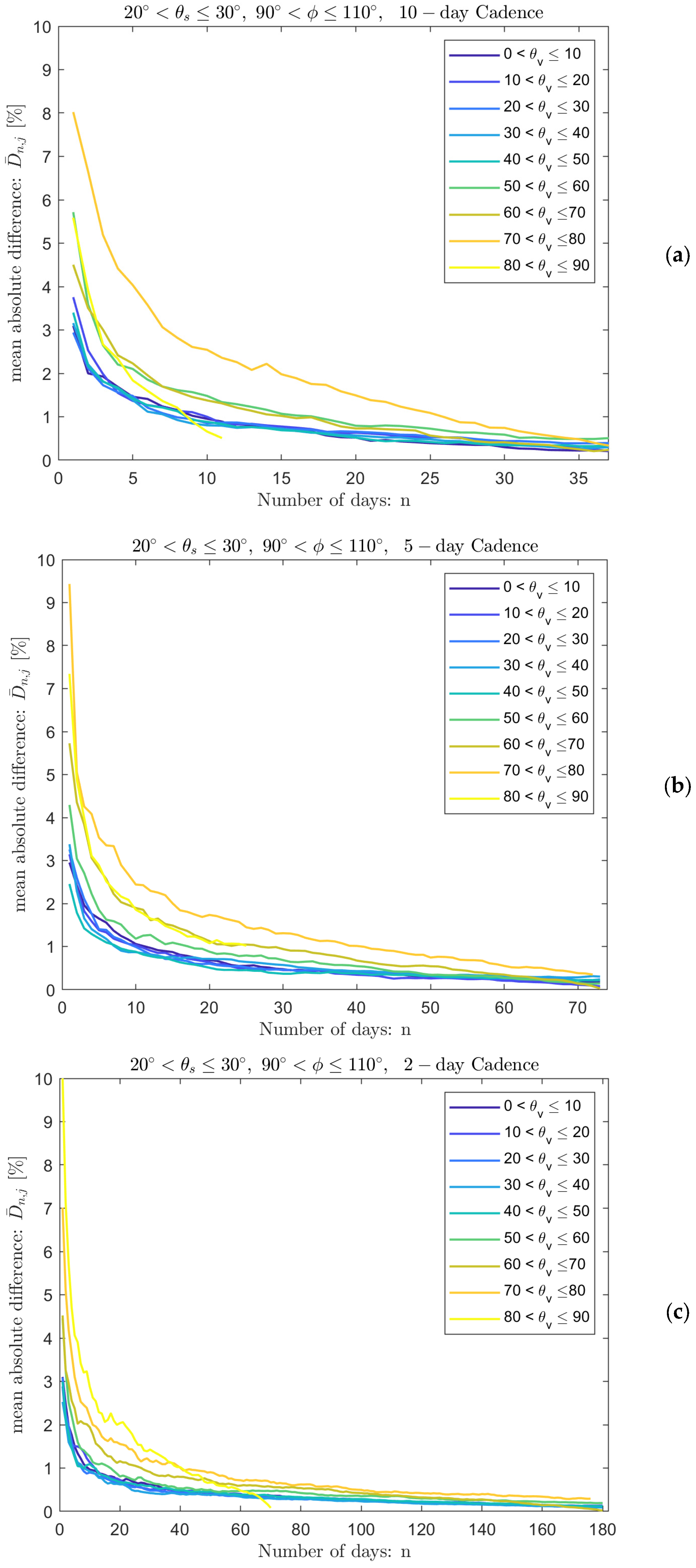
5.3. Bin-by-Bin Radiance Convergence-Based Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADMs | Angular Distribution Models |
| CERES | Clouds and the Earth’s Radiant Energy System |
| ERB | Earth Radiation Budget |
| ERBE | Earth Radiation Budget Experiment |
| FM3 | Flight Model 3 |
| FM5 | Flight Model 5 |
| IGBP | International Geosphere-Biosphere Programme |
| JPSS-4 | Joint Polar Satellite System-4 |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| NPP | National Polar-orbiting Partnership |
| RAPS | Rotating Azimuthal Plane Scan |
| SSF | Single Scanner Footprint |
| TRMM | Tropical Rainfall Measuring Mission |
| TSIS-1 | Total and Spectral Solar Irradiance Sensor |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| WFOV | Wide Field Of View |
References
- Coddington, O.M.; Richard, E.C.; Harber, D.; Pilewskie, P.; Woods, T.N.; Chance, K.; Liu, X.; Sun, K. The TSIS-1 Hybrid Solar Reference Spectrum. Geophys. Res. Lett. 2021, 48, e2020GL091709. [Google Scholar] [CrossRef]
- Wielicki, B.A.; Barkstrom, B.R.; Harrison, E.F.; Lee, R.B.; Smith, G.L.; Cooper, J.E. Clouds and the Earth’s Radiant Energy System (CERES): An Earth Observing System Experiment. Bull. Am. Meteorol. Soc. 1996, 77, 853–868. [Google Scholar] [CrossRef]
- Loeb, N.G.; Su, W.; Doelling, D.R.; Wong, T.; Minnis, P.; Thomas, S.; Miller, W.F. 5.03—Earth’s Top-of-Atmosphere Radiation Budget. In Comprehensive Remote Sensing; Liang, S., Ed.; Elsevier: Oxford, UK, 2018; pp. 67–84. ISBN 978-0-12-803221-3. [Google Scholar]
- Loeb, N.G.; Johnson, G.C.; Thorsen, T.J.; Lyman, J.M.; Rose, F.G.; Kato, S. Satellite and Ocean Data Reveal Marked Increase in Earth’s Heating Rate. Geophys. Res. Lett. 2021, 48, e2021GL093047. [Google Scholar] [CrossRef]
- Nerem, R.S.; Beckley, B.D.; Fasullo, J.T.; Hamlington, B.D.; Masters, D.; Mitchum, G.T. Climate-change–driven accelerated sea-level rise detected in the altimeter era. Proc. Natl. Acad. Sci. USA 2018, 115, 2022–2025. [Google Scholar] [CrossRef]
- Ebi, K.L.; Vanos, J.; Baldwin, J.W.; Bell, J.E.; Hondula, D.M.; Errett, N.A.; Hayes, K.; Reid, C.E.; Saha, S.; Spector, J.; et al. Extreme Weather and Climate Change: Population Health and Health System Implications. Annu. Rev. Public Health 2021, 42, 293–315. [Google Scholar] [CrossRef] [PubMed]
- Wong, T.; Smith, G.L.; Kato, S.; Loeb, N.G.; Kopp, G.; Shrestha, A.K. On the Lessons Learned From the Operations of the ERBE Nonscanner Instrument in Space and the Production of the Nonscanner TOA Radiation Budget Data Set. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5936–5947. [Google Scholar] [CrossRef] [PubMed]
- Loeb, N.G.; Manalo-Smith, N.; Kato, S.; Miller, W.F.; Gupta, S.K.; Minnis, P.; Wielicki, B.A. Angular Distribution Models for Top-of-Atmosphere Radiative Flux Estimation from the Clouds and the Earth’s Radiant Energy System Instrument on the Tropical Rainfall Measuring Mission Satellite. Part I: Methodology. J. Appl. Meteor. 2003, 42, 240–265. [Google Scholar] [CrossRef]
- Hakuba, M.Z.; Kindel, B.; Gristey, J.; Bodas-Salcedo, A.; Stephens, G.; Pilewskie, P. Simulated Variability in Visible and Near-IR Irradiances in Preparation for the Upcoming Libera Mission; AIP Publishing: Thessaloniki, Greece, 2024; p. 050006. [Google Scholar]
- Gristey, J.J.; Schmidt, K.S.; Chen, H.; Feldman, D.R.; Kindel, B.C.; Mauss, J.; Van Den Heever, M.; Hakuba, M.Z.; Pilewskie, P. Angular sampling of a monochromatic, wide-field-of-view camera to augment next-generation Earth radiation budget satellite observations. Atmos. Meas. Tech. Discuss. 2023, 16, 3609–3630. [Google Scholar] [CrossRef]
- Kampe, T.U.; Schmitt, S.; Gristey, J.J.; Harber, D.; Pilewskie, P.; Spuhler, P.; Gordon, M.; Amparan, B.; Bannon, E.; Vujcich, M.; et al. Libera’s wide-field-of-view camera for augmenting next-generation Earth radiation budget satellite observations. In Proceedings of the CubeSats, SmallSats, and Hosted Payloads for Remote Sensing VIII; Pagano, T.S., Puschell, J.J., Babu, S.R., Eds.; SPIE: San Diego, CA, USA, 2024; p. 4. [Google Scholar]
- Gristey, J.J.; Su, W.; Loeb, N.G.; Vonder Haar, T.H.; Tornow, F.; Schmidt, K.S.; Hakuba, M.Z.; Pilewskie, P.; Russell, J.E. Shortwave Radiance to Irradiance Conversion for Earth Radiation Budget Satellite Observations: A Review. Remote Sens. 2021, 13, 2640. [Google Scholar] [CrossRef]
- Barkstrom, B.R. The Earth Radiation Budget Experiment (ERBE). Bull. Am. Meteor. Soc. 1984, 65, 1170–1185. [Google Scholar] [CrossRef]
- Suttles, J.; Green, R.; Minnis, P.; Smith, G.; Staylor, W.; Wielicki, B.; Walker, I.; Young, D.; Taylor, V.; Stowe, L. Angular radiation models for Earth-atmosphere system. NASA Ref. Publ. 1184 1988, 1, 88N27677. [Google Scholar]
- Smith, G.L.; Green, R.N.; Raschke, E.; Avis, L.M.; Suttles, J.T.; Wielicki, B.A.; Davies, R. Inversion methods for satellite studies of the Earth’s Radiation Budget: Development of algorithms for the ERBE Mission. Rev. Geophys. 1986, 24, 407–421. [Google Scholar] [CrossRef]
- CERES: IGBP Land Classification. Available online: https://climatedataguide.ucar.edu/climate-data/ceres-igbp-land-classification (accessed on 1 November 2024).
- Su, W.; Corbett, J.; Eitzen, Z.; Liang, L. Next-generation angular distribution models for top-of-atmosphere radiative flux calculation from CERES instruments: Methodology. Atmos. Meas. Tech. 2015, 8, 611–632. [Google Scholar] [CrossRef]
- Miller, S.; Straka, W.; Mills, S.; Elvidge, C.; Lee, T.; Solbrig, J.; Walther, A.; Heidinger, A.; Weiss, S. Illuminating the Capabilities of the Suomi National Polar-Orbiting Partnership (NPP) Visible Infrared Imaging Radiometer Suite (VIIRS) Day/Night Band. Remote Sens. 2013, 5, 6717–6766. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Lin, G.; Nishihama, M.; Tewari, K.P.; Tilton, J.C.; Isaacman, A.R. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. Atmos. 2013, 118, 11508–11521. [Google Scholar] [CrossRef]
- Scott, R.C.; Rose, F.G.; Stackhouse, P.W.; Loeb, N.G.; Kato, S.; Doelling, D.R.; Rutan, D.A.; Taylor, P.C.; Smith, W.L. Clouds and the Earth’s Radiant Energy System (CERES) Cloud Radiative Swath (CRS) Edition 4 Data Product. J. Atmos. Ocean. Technol. 2022, 39, 1781–1797. [Google Scholar] [CrossRef]
- Loeb, N.G.; Kato, S.; Loukachine, K.; Manalo-Smith, N. Angular Distribution Models for Top-of-Atmosphere Radiative Flux Estimation from the Clouds and the Earth’s Radiant Energy System Instrument on the Terra Satellite. Part I: Methodology. J. Atmos. Ocean. Technol. 2005, 22, 338–351. [Google Scholar] [CrossRef]
- Wang, L.; Su, X.; Wang, Y.; Cao, M.; Lang, Q.; Li, H.; Sun, J.; Zhang, M.; Qin, W.; Li, L.; et al. Towards long-term, high-accuracy, and continuous satellite total and fine-mode aerosol records: Enhanced Land General Aerosol (e-LaGA) retrieval algorithm for VIIRS. ISPRS J. Photogramm. Remote Sens. 2024, 214, 261–281. [Google Scholar] [CrossRef]
- Jin, S.; Ma, Y.; Li, H.; Liu, B.; Fan, R.; Zhang, M.; Lopatin, A.; Dubovik, O.; Hu, X.; Gong, W.; et al. Characterizing Aerosol Optical Properties and Direct Radiative Effects From the Perspective of Components: A Synergy Retrieval Study Based on Sun Photometer and Lidar in Central China. Geophys. Res. Lett. 2025, 52, e2024GL113448. [Google Scholar] [CrossRef]
- van den Heever, M.; Gristey, J.; Pilewskie, P. Optimizing the Sampling Strategy for Future Libera Earth Radiation Budget Satellite Observations. In Proceedings of the Optimizing the Sampling Strategy for Future Libera Earth Radiation Budget Satellite Observations, Hangzhou, China, 17 June 2024. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene ID Number | Cloud Fraction | Surface Type |
|---|---|---|
| 1 | Cloud Free (0–5%) | Ocean |
| 2 | Cloud Free (0–5%) | Snow |
| 3 | Cloud Free (0–5%) | Land |
| 4 | Cloud Free (0–5%) | Desert |
| 5 | Partly Cloudy (5–50%) | Ocean |
| 6 | Partly Cloudy (5–50%) | Snow |
| 7 | Partly Cloudy (5–50%) | Land or Desert |
| 8 | Mostly Cloudy (50–95%) | Ocean |
| 9 | Mostly Cloudy (50–95%) | Snow |
| 10 | Mostly Cloudy (50–95%) | Land or Desert |
| 11 | Overcast (95–100%) | All * |
| IGBP Surface Type | ERBE-Like Surface Definition | TRMM-Like Surface Definition |
|---|---|---|
| Evergreen Needleleaf Forest | Land | Moderate-to-High Trees/Shrubs |
| Evergreen Broadleaf Forest | Land | Moderate-to-High Trees/Shrubs |
| Deciduous Needleleaf Forest | Land | Moderate-to-High Trees/Shrubs |
| Deciduous Broadleaf Forest | Land | Moderate-to-High Trees/Shrubs |
| Mixed Forest | Land | Moderate-to-High Trees/Shrubs |
| Closed Shrublands | Land | Moderate-to-High Trees/Shrubs |
| Open Shrublands | Desert | Dark Desert |
| Woody Savannas | Land | Moderate-to-High Trees/Shrubs |
| Savannas | Land | Low-to-Moderate Trees/Shrubs |
| Grasslands | Land | Low-to-Moderate Trees/Shrubs |
| Permanent Wetlands | Land | Low-to-Moderate Trees/Shrubs |
| Croplands | Land | Low-to-Moderate Trees/Shrubs |
| Urban and Built-up | Land | Low-to-Moderate Trees/Shrubs |
| Cropland and Mosaics | Land | Low-to-Moderate Trees/Shrubs |
| Snow and Ice (permanent) | Snow | Snow |
| Bare Soil and Rocks | Desert | Bright Desert |
| Water Bodies | Ocean | Ocean |
| Tundra | Land | Low-to-Moderate Trees/Shrubs |
| Fresh Snow | Snow | Snow |
| Sea Ice | Snow | Snow |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
van den Heever, M.; Gristey, J.J.; Pilewskie, P. Optimizing the Sampling Strategy for Future Libera Radiance to Irradiance Conversions. Remote Sens. 2025, 17, 2540. https://doi.org/10.3390/rs17152540
van den Heever M, Gristey JJ, Pilewskie P. Optimizing the Sampling Strategy for Future Libera Radiance to Irradiance Conversions. Remote Sensing. 2025; 17(15):2540. https://doi.org/10.3390/rs17152540
Chicago/Turabian Stylevan den Heever, Mathew, Jake J. Gristey, and Peter Pilewskie. 2025. "Optimizing the Sampling Strategy for Future Libera Radiance to Irradiance Conversions" Remote Sensing 17, no. 15: 2540. https://doi.org/10.3390/rs17152540
APA Stylevan den Heever, M., Gristey, J. J., & Pilewskie, P. (2025). Optimizing the Sampling Strategy for Future Libera Radiance to Irradiance Conversions. Remote Sensing, 17(15), 2540. https://doi.org/10.3390/rs17152540