1. Introduction
The intensity of electronic warfare on modern battlefields continues to escalate, and the jamming threats faced by radar systems are becoming increasingly severe [
1,
2]. Spatially, radar jamming can be categorized into sidelobe jamming [
3] and mainlobe jamming [
4]. For sidelobe jamming, conventional phased array radars [
5,
6] can effectively suppress jamming using techniques such as adaptive beamforming [
7] or sidelobe cancellers [
8]. However, when the jammer and the target are both located within the mainlobe, forming mainlobe jamming, the jamming signal is amplified by the mainlobe gain, resulting in higher energy. Furthermore, due to limitations in angular resolution, the radar cannot suppress the jamming signal while simultaneously preserving the target signal. This severely compromises the target detection capabilities of radar [
9,
10].
Distributed array radar systems deploy multiple radar nodes over a long baseline to achieve exceptionally high angular resolution [
11,
12,
13]. When countering mainlobe jamming, these systems can form extremely narrow nulls to suppress jamming signals while preserving the energy of target signals [
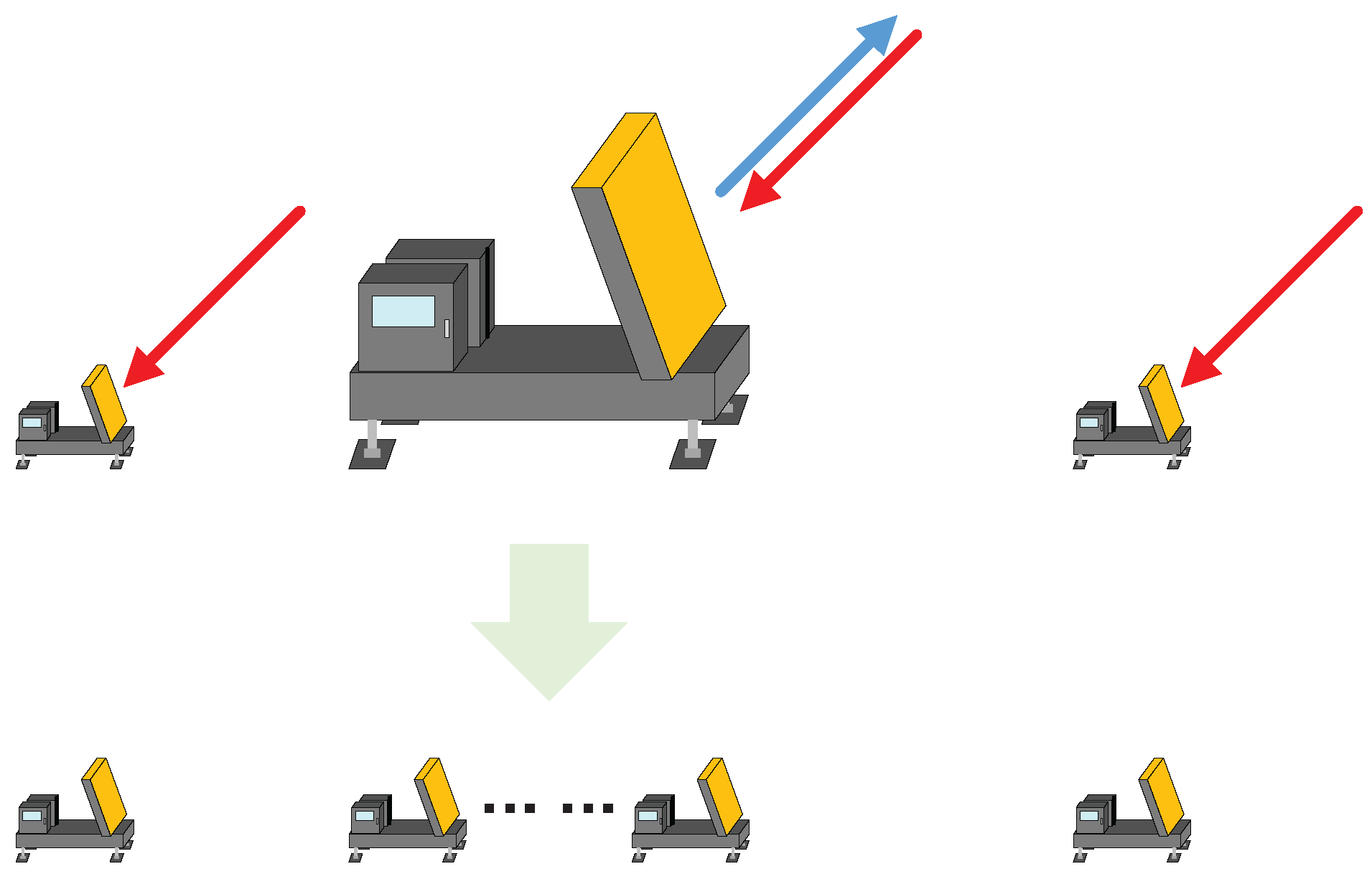
14]. In practical applications, a main-auxiliary distributed array radar configuration is often employed. This setup involves deploying one main radar capable of both transmitting and receiving signals, along with a small number of auxiliary radars that are only capable of receiving signals, over a long baseline [
15]. Essentially, the distributed array radar leverages its long-baseline deployment to convert the mainlobe jamming of the main radar into sidelobe jamming for the entire array, thereby enabling effective suppression through spatial beamforming techniques. In such a design, the auxiliary radars are fewer in number and do not require signal transmission capability, which effectively reduces system costs and enhances the implementation feasibility. Authors of [
16] developed a cost-effective receive-only auxiliary radar architecture utilizing a commercial chip that integrates all essential radio frequency, mixed-signal, and digital modules to achieve full receiver capabilities. Existing research on anti-jamming techniques for this kind of distributed array radar primarily focuses on algorithm design. For example, researchers of [
17] proposed an algorithm that enhances anti-jamming performance by dividing signals into subbands. Additionally, authors of [
18] introduced a joint suppression algorithm for jamming and clutter based on the generalized inner product in distributed array radar systems.
Due to the sparse deployment of distributed array radars over long baselines, the occurrence of grating lobes is unavoidable. Existing research primarily focuses on sparse array design to suppress grating lobes or sidelobes. For instance, the chaos sparrow search algorithm (CSSA) in [
19] synthesized sparse planar arrays with low peak sidelobe levels and improved convergence efficiency, combining density-weighted methods with chaotic mapping for element position optimization. Similarly, a research group of [
20] introduced a discrete slime mold algorithm (DSMA) for ultrasonic sensor arrays, which achieved sidelobe suppression by optimizing array sparsity while reducing computational complexity. The water cycle algorithm (WCA) was also applied to design low-sidelobe beam patterns with wide nulling capabilities [
21]. Other works have explored hybrid optimization techniques such as quantum particle swarm optimization (QPSO) [
22], enhanced Harris hawks optimization (EHHO) [
23], and adaptive genetic algorithms (AGA) with self-supervised differential operators [
24] to address grating lobe suppression. These algorithms primarily aim to reduce the impact of grating lobes by optimizing the positions of array nodes, often assuming the presence of dozens or even hundreds of nodes. However, in the case of a distributed array radar with one main and a few auxiliary nodes deployed over a long baseline, adjusting node positions alone is insufficient to effectively reduce the grating lobe levels.
For distributed array radar systems, the location of grating lobes is influenced not only by the positions of the nodes but also by the operating frequency. Authors of [
25] proposed a dual-frequency method that performs unambiguous direction-of-arrival estimation through phase differencing between frequencies, mitigating grating lobe ambiguities during target observation. Although this algorithm cannot be applied to jamming suppression, introducing frequency to address grating lobes is indeed an approach worth referencing.
To fully account for the characteristics of main-auxiliary distributed array radar systems and achieve comprehensive grating lobe suppression, this paper proposes a novel joint optimization algorithm that simultaneously designs both radar positions and subpulse carrier frequencies, with particular emphasis on mainlobe jamming suppression performance. The algorithm optimizes radar positions and designs multiple subpulses with different frequencies, ensuring that the distributed array radar achieves the optimal output signal-to-jamming and noise ratio (SJNR) for jamming signals appearing at any angle within the mainlobe. In this paper, the formation of grating nulls in spatial domain adaptive processing for distributed array radar is analyzed based on beamforming principles. To address the gain and aperture inconsistencies between the main and auxiliary radars, a grating lobe optimization model is developed for a distributed array radar system with one main radar and multiple auxiliary radars. Building on this, a novel strategy for mainlobe jamming suppression is introduced, incorporating multiple subpulses with different frequencies. Frequency is introduced as an optimization parameter in grating lobe suppression by mapping a frequency range onto a specific angular range at a single frequency point, effectively integrating frequency into the radar position optimization process. Radar positions are first optimized using a constrained particle swarm optimization (PSO) algorithm, followed by further optimization of subpulse frequencies to minimize the highest peak grating lobe. In a specific scenario, the optimal frequency is unique, while other frequencies degrade system performance. Furthermore, frequent switching between different frequency pulses increases system complexity and complicates pulse accumulation. To address this, this paper proposes an optimal frequency selection strategy based on output SJNR. The system then transmits pulses at this frequency exclusively in this scenario, thereby improving performance while avoiding unnecessary frequency switching. Finally, simulations are conducted to validate the proposed model and algorithm. The results demonstrate the effectiveness of the proposed approach in enhancing anti-jamming performance. This study further verifies the effectiveness of the SJNR-based optimal frequency selection strategy through dynamic scenario simulation.
The organization of the paper is as follows:
Section 1 introduces the research background and highlights the main contributions of this study.
Section 2 details the signal model and optimization model.
Section 3 outlines the proposed algorithm.
Section 4 presents the simulation results to validate the algorithm. Finally,
Section 5 concludes the paper.
3. Joint Optimization of Positions and Carrier Frequencies
Clearly, the optimization problem in (
13) is non-convex. This paper employs the PSO algorithm [
33] to solve the problem in (
13). The PSO algorithm, as a multi-objective optimization method, treats the main radar position as a distinct element within a particle for optimization. Additionally, the PSO algorithm’s search mechanism—guided by both the global best solution and personal best solutions—effectively ensures that particles remain within the baseline length constraints. A stepwise optimization strategy is then employed to select the subpulse frequencies.
3.1. Radar Position Optimization Based on the PSO Algorithm
3.1.1. Constrained Initialization
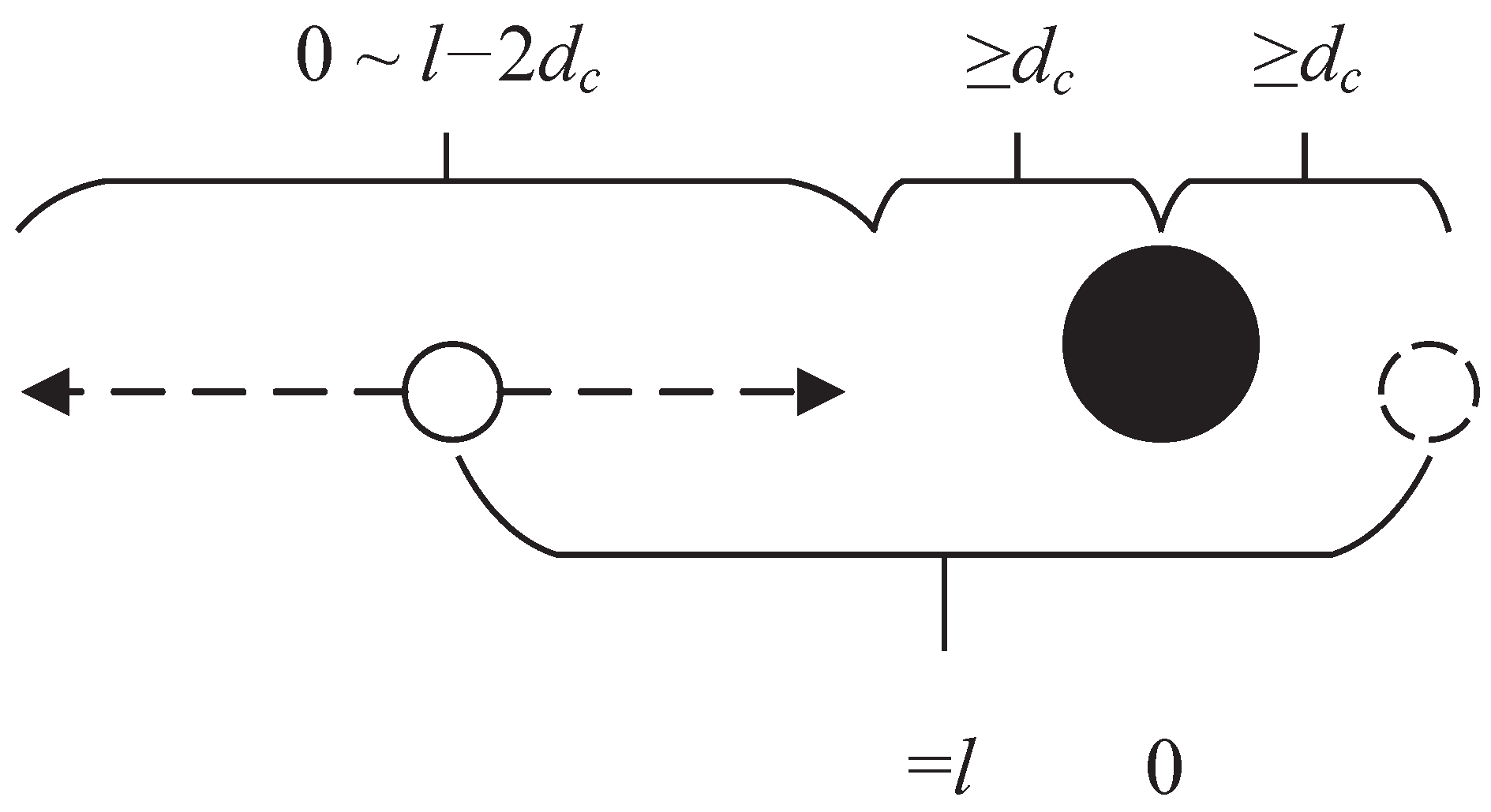
Considering the differences between the main and auxiliary radars, the position of the main radar must be treated as a separate parameter for optimization. Therefore, during particle initialization, this paper generates positions based on the main radar as a reference, as shown in
Figure 4. The black dot represents the main radar, while the white dots represent the auxiliary radars.
With constraints on the baseline length l and the minimum spacing , the main radar is positioned at 0. The leftmost radar is generated first and is randomly positioned within a range of length . Once the leftmost radar is generated, the position of the rightmost radar can be determined based on the baseline length constraint. The existing three nodes occupy a total space of . To strictly ensure that the spacing between radars exceeds , the remaining auxiliary radars still require spacing. Therefore, the remaining radars are generated within the range of length , followed by adjustments made according to the positions of existing radars.
After all radar positions are generated, a collective translation is applied to the entire set such that the leftmost radar is positioned at 0 and the rightmost radar is positioned at l. In this paper, such a set of radar positions is considered as a particle . Particles are generated sequentially to form the particle swarm .
3.1.2. Fitness Calculation
Due to the symmetry of the antenna beam pattern, it is only necessary to calculate the fitness within half of the angular range. Additionally, as this paper focuses on mainlobe jamming, only the angular range within the mainlobe of the main radar needs to be considered. Thus, the optimization is confined to angles outside the mainlobe of the entire array but within the mainlobe of the main radar.
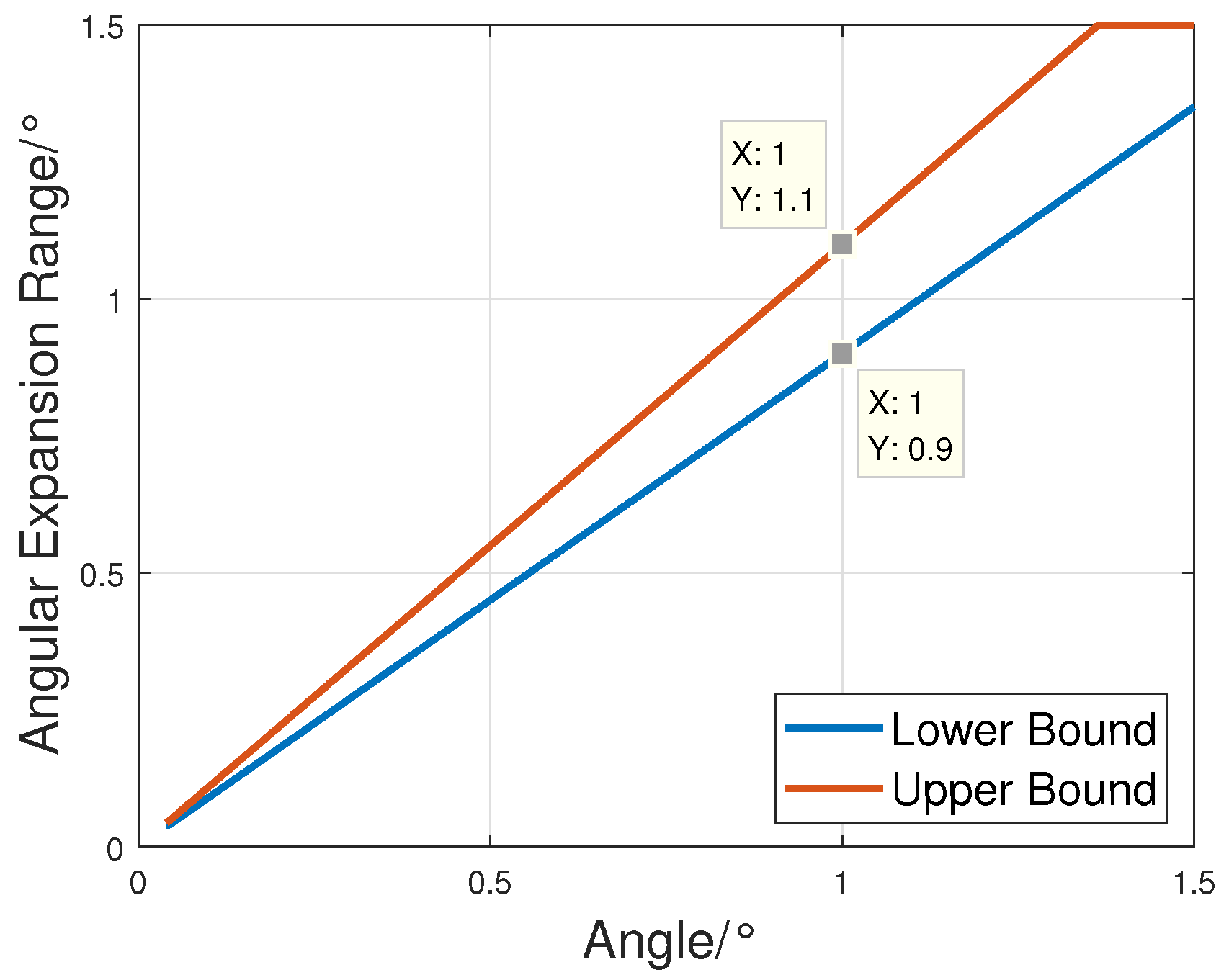
Using the multi-frequency mapping method described in
Section 2.2, the angular range corresponding to the frequency range can be calculated. Under specific parameter settings, the angular expansion range
for each angle at the center frequency is illustrated in
Figure 5.
In
Figure 5, the red line represents the upper bound, and the blue line denotes the lower bound, with the horizontal axis corresponding to the optimization angle
. As defined in (
13), the response at any
is replaced by the minimum response within its corresponding angular expansion range. For example, in the multi-frequency subpulse scheme, the response at 1° is determined by the lowest response within the range of 0.9° to 1.1° at the center frequency.
During the optimization process, only the center position of the main radar is considered. The main radar is expanded into multiple subarrays solely during the fitness calculation.
3.1.3. Preprocessing for Spacing Constraints
The initially generated particles are strictly constrained, ensuring compliance with the spacing constraints in the optimization problem. The PSO algorithm searches for an optimal solution through iterative particle motion within the feasible solution space. To maintain these constraints during the particles’ motions, preprocessing of the original particle is necessary. Inspired by the differential operator used in genetic algorithms in [
24], we applied a mapping method to the particles before and after their motions. Prior to particles’ motions,
is mapped onto
. The relationship between
and
is given in (
14).
During the processing, each particle
in the particle swarm
is mapped to
using the aforementioned formula, forming a new particle swarm
. After the motion of
, all particles can be mapped back to
via (
14) by adding
, ensuring that the actual radar positions always satisfy the spacing constraints.
3.1.4. Particle Motion and Velocity Update
The updating equation for the velocity of the PSO algorithm is as follows:
represents the personal best solution of the current particle, while
denotes the global best solution among all particles. The current position and velocity of the particle are denoted as
and
, respectively, with
being the updated velocity. The inertia weight
, which can vary within a certain range during the iterative process, balances exploration and exploitation. The cognitive learning factor
adjusts the influence of the particle’s personal best solution on its moving direction, while the global learning factor
controls the influence of the global best solution. Random numbers
and
are introduced to the cognitive and global learning components, adding stochasticity to the search process. To prevent particles from exceeding the feasible solution space boundaries during their first motions, the initial velocity was set to 0.
The research group of [
34] proved that when the cognitive learning factor
and global learning factor
satisfy
, the algorithm demonstrates better convergence properties, and any parameter configuration meeting this condition is theoretically valid. The linear convergence strategy with inertia weight, as proposed in [
35], mandates an initial inertia weight value of no less than 0.9. In this paper, we design our parameters by referring to these research findings. Overall, these parameters determine the step size of the particle’s motion. The specific selection of parameters involves a trade-off between convergence speed and computational burden. Since the proposed optimization framework is a pre-optimization scheme with low real-time requirements, this study prioritizes smaller step sizes and more iterations to achieve better optimization results.
It should be noted that, due to the differences in power and aperture between the main radar and auxiliary radars, the main radar in each particle must be individually matched and adjusted before being moved. Each particle calculates its corresponding velocity using (
17), and updates its position according to the following equation:
To reduce the risk of the algorithm falling into a local optimum due to a poor initial particle, the strategy of retaining only the best particle and reinitializing the swarm is adopted. This paper defines the process as an inner iteration number and an outer iteration number . After iterations, the particle swarm is reinitialized, and this reinitialization is performed a total of times. This approach aims to achieve better optimization results.
3.2. Subpulse Frequency Design Based on PGLL Minimization
After optimizing the radar positions using the above algorithm, the variation range of subpulse frequencies has already been coupled into the optimization function. However, in practice, considering the need for real-time processing, the number of subpulses should be limited. Therefore, it is necessary to further determine the specific frequencies of the subpulses based on the optimized positions.
According to the proposed multi-subpulse jamming suppression scheme, the overall pattern response at each angle is the minimum value of the pattern responses across all frequency points, as expressed in (
19).
N denotes the number of frequency points in the frequency set
U, and
denotes the
n-th frequency point.
As shown in (
19), for any given frequency set
U, adding a new frequency point will always result in a PGLL that is less than or equal to the original PGLL. This paper proposes a stepwise subpulse frequency design scheme. Specifically, the PGLL is calculated for the current frequency set, and the angle corresponding to the PGLL is identified. A new frequency point is then searched within the frequency range to minimize the response at this angle, and the new frequency point is added to the current frequency set. This process is repeated until the PGLL approaches the PSO optimization results or the maximum number of subpulses is reached. The overall process of the proposed algorithm is shown in Algorithm 1.
| Algorithm 1 Joint Optimization of Positions and Carrier Frequencies |
- 1:
for to do - 2:
Initialize the particle swarm (composed of particles ) according to the constraints. - 3:
if then - 4:
Incorporate the global best particle from the previous generation into the particle swarm . - 5:
end if - 6:
for to do - 7:
Calculate the fitness based on ( 13). - 8:
Map onto based on ( 14). - 9:
Update the velocity according to ( 17) and move to obtain the updated - 10:
Map onto based on ( 14). - 11:
end for - 12:
Save the global best particle . - 13:
end for - 14:
Initialize the subpulse frequency set U with the minimum frequency point. - 15:
while do - 16:
Calculate the angle of the PGLL under the current subpulse frequency set U based on the optimized radar positions and ( 19). - 17:
Iterate through the frequency range to find that minimizes the response at . - 18:
Add to the subpulse frequency set U. - 19:
end while - 20:
return Optimized positions and frequency set U
|
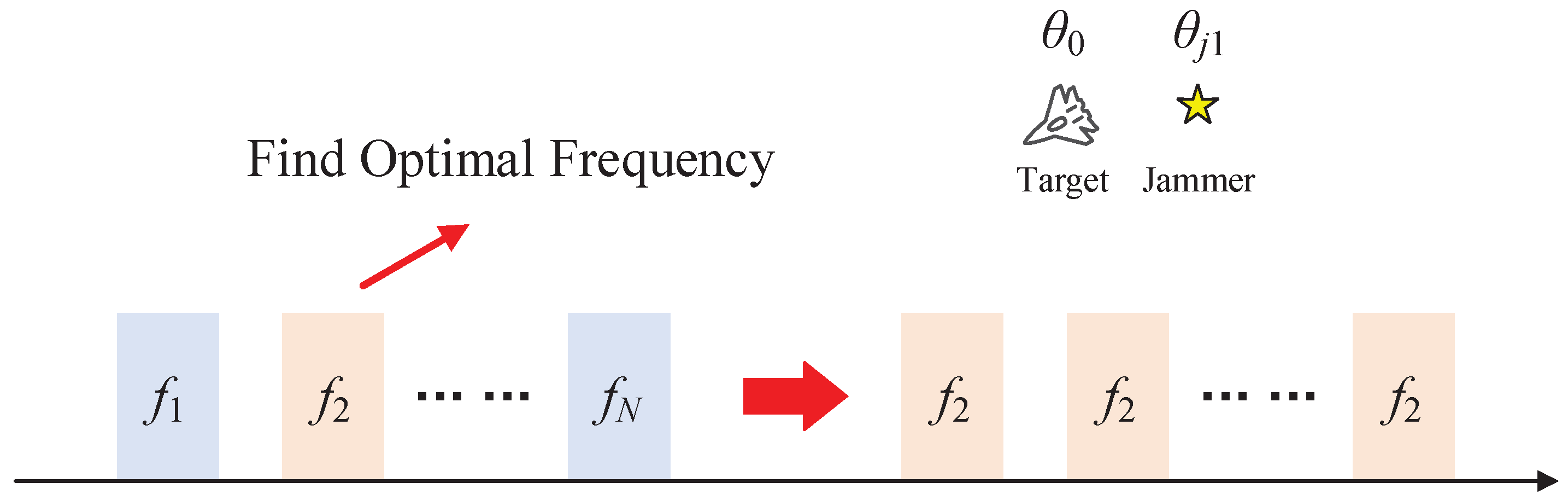
3.3. Optimal Frequency Selection via SJNR Comparison
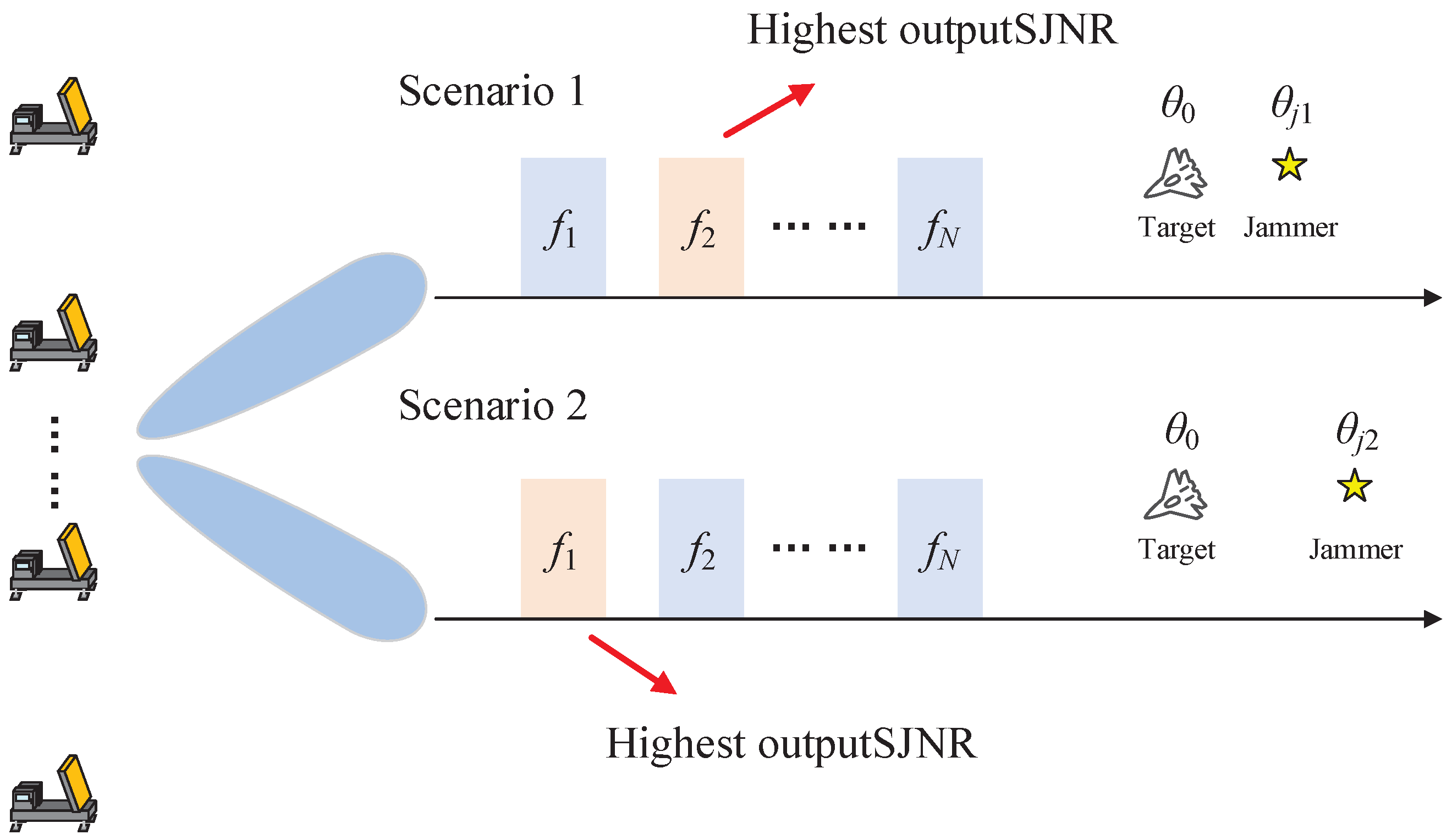
In practical applications, using multiple pulses with different frequencies can lead to challenges in achieving coherent accumulation across pulses. Consequently, continuously employing multiple sub-pulses may not be the optimal approach. In the proposed framework, after designing the radar position and carrier frequency, the optimal frequency under specific jamming scenarios (e.g., target-jammer angle separation) is uniquely determined. This motivates the development of a frequency selection strategy to identify the most performant frequency within the current scenario. Subsequent transmissions then focus exclusively on this single optimal frequency to avoid SNR loss caused by incoherent accumulation of signals with different carrier frequencies. This approach is illustrated in
Figure 6.
The ultimate objective of optimization in this study is to enhance the output SJNR after jamming suppression. To achieve this, the following frequency selection strategy can be employed:
1. Sequentially transmit pulses at each frequency within the frequency set U. After jamming suppression for each pulse, record the corresponding output SJNR.
2. Select the carrier frequency with the highest recorded output SJNR as the operating frequency for subsequent pulse.
3. When the target and jammer continuously move in space, the output SJNR for the current carrier frequency may gradually degrade. If the output SJNR drops significantly relative to the initial value (e.g., a decline exceeding 3 dB), revert to step 1 to re-select the new optimal frequency.
This strategy avoids frequent switching of the operating frequency, thereby effectively reducing the complexity of the system and the difficulty of pulse accumulation.
5. Conclusions
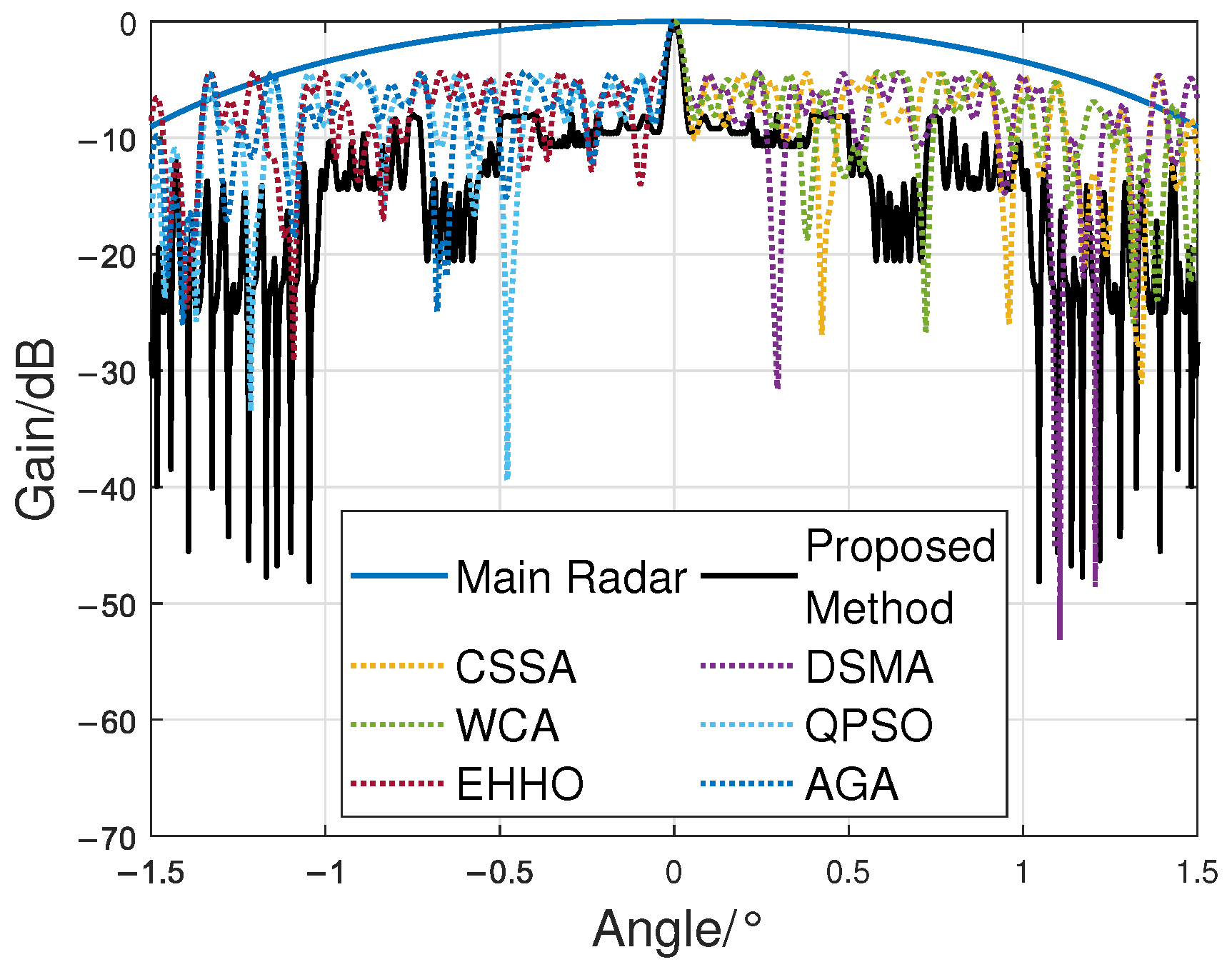
Radar systems are facing increasingly severe electronic jamming threats, with jamming techniques becoming more complex and diverse. To enhance electronic countermeasure capabilities, radar systems must adopt new “increments.” Distributed array radar introduces multiple auxiliary radars to transform mainlobe jamming on the main radar into sidelobe jamming for the entire array, effectively improving the system’s detection capability under mainlobe jamming conditions. However, the grating lobe problem caused by long baselines can degrade mainlobe jamming suppression performance in certain angular ranges. Building on the position design of distributed array radar, this paper introduced the frequency parameter as a new “increment” by employing multiple subpulses with different frequencies to enhance jamming suppression performance. A joint optimization scheme was introduced, along with a new optimization function and framework. Subsequently, an optimal carrier frequency selection was developed based on the comparison of output SJNR, enhancing the implementation feasibility of the optimization framework. Both model-based simulations and signal-level simulations have validated the effectiveness of the proposed optimization method. Compared to the position-only optimization scheme, the proposed method reduces grating lobe by more than 3 dB and improves the output SJNR by nearly 3 dB. While the current model was primarily designed for single mainlobe jamming scenarios, the joint optimization of carrier frequency and location could still theoretically enhance performance in multi-mainlobe jamming environments, which we will further explore in future work. This work provides a reference for the design of position and frequency configurations in distributed array radar systems for practical applications, aiming to enhance the spatial mainlobe jamming suppression performance.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}