
Global Validation of the Version F Geophysical Data Records from the TOPEX/POSEIDON Altimetry Satellite Mission

 , ,
, ,
Abstract

1. Introduction
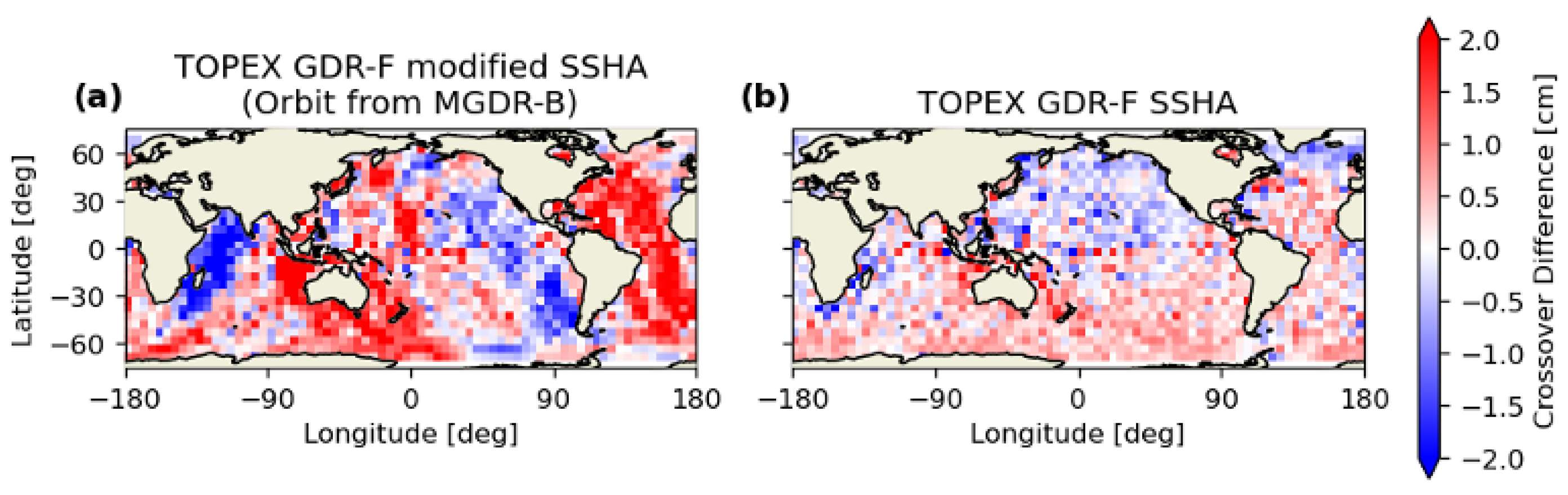
- Sea Surface Height Anomaly (SSHA) crossover performance (Section 3.1.1);
- SSHA along-track performance, including the impact of upgrades to modern geophysical models (Section 3.1.2);
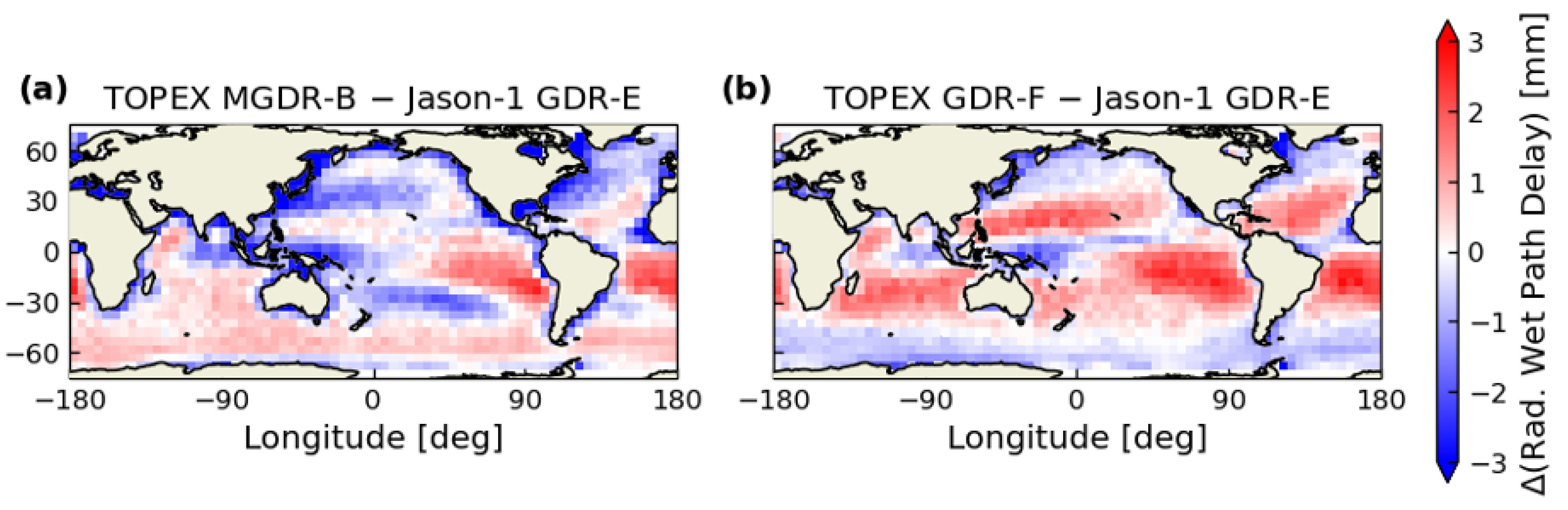
- Consistency of TOPEX and Jason-1 during the tandem mission (Section 3.1.3);
- Impact of the numerical retracking on the altimeter parameters (Section 3.2);
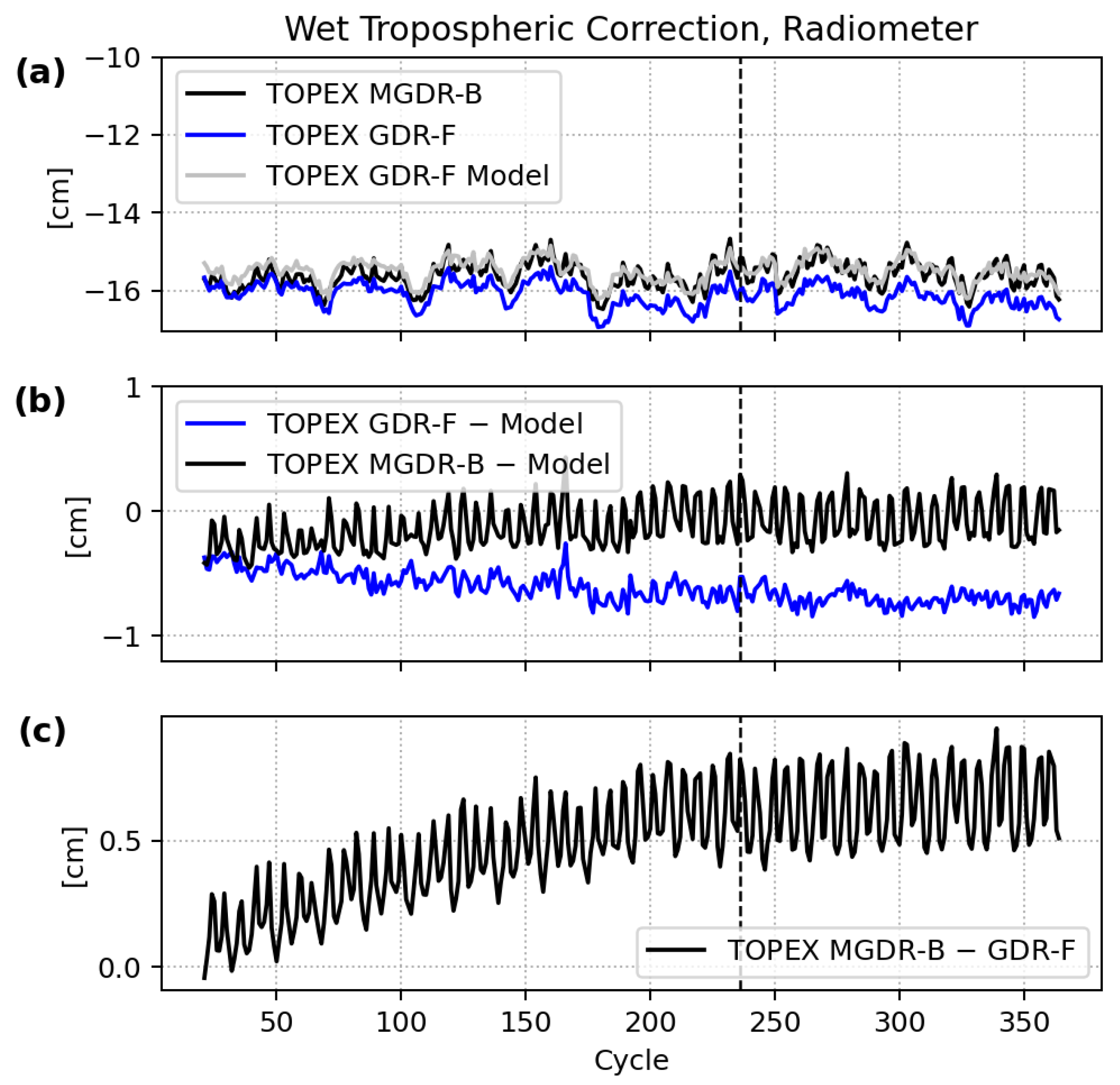
- Impact of the re-calibrated radiometer measurements on the wet tropospheric delay correction (Section 3.4);
- Impact of precise orbit ephemeris solutions on the SSHA performance (Section 3.5).
2. The Geophysical Data Record Reprocessing and Product Updates
2.1. Geophysical Data Record–Updates and Coverage
- Waveform retracking:
- (a)
- Ground reprocessing of the TOPEX altimeter data based on a numerical retracking of the echoes [12], with MLE-4 and MLE-3 solutions for the Ku-band and an MLE-3 solution for the C-band. This approach mitigates the impact of the altimeter degradation (especially for TOPEX side A) on the data record.
- (b)
- Ground processing of the POSEIDON altimeter data based on the retracking of the echoes, with MLE-4 and MLE-3 solutions for the Ku-band [13].
- New orbit ephemeris solutions: Two precise orbit ephemeris (POE) solutions were computed based on best available processing standards in the 2014 International Terrestrial Reference Frame (ITRF). One POE solution was provided by NASA GSFC (F. Lemoine, personal communication, 2023) and the second was provided by CNES (A. Couhert, personal communication, 2023).
- New Sea State Bias (SSB): Non-parametric SSB models for the TOPEX altimeter that are self-consistent with the reprocessed data products. These include a 2-D model from [14] and a 3-D model from [15]. The parametric SSB model from [18] for the POSEIDON altimeter uses reprocessed data products as input.
- Updated models for the geophysical and environmental corrections consistent with the GDR-F standards used by other altimeter missions when the T/P GDR-F product was released.
2.2. Reprocessing Approach of the TOPEX/POSEIDON Altimetry Data Record
3. Assessment of Performance Improvement for TOPEX Geophysical Data Record and Consistency with Jason-1
3.1. Performance of TOPEX Sea Surface Height Anomaly
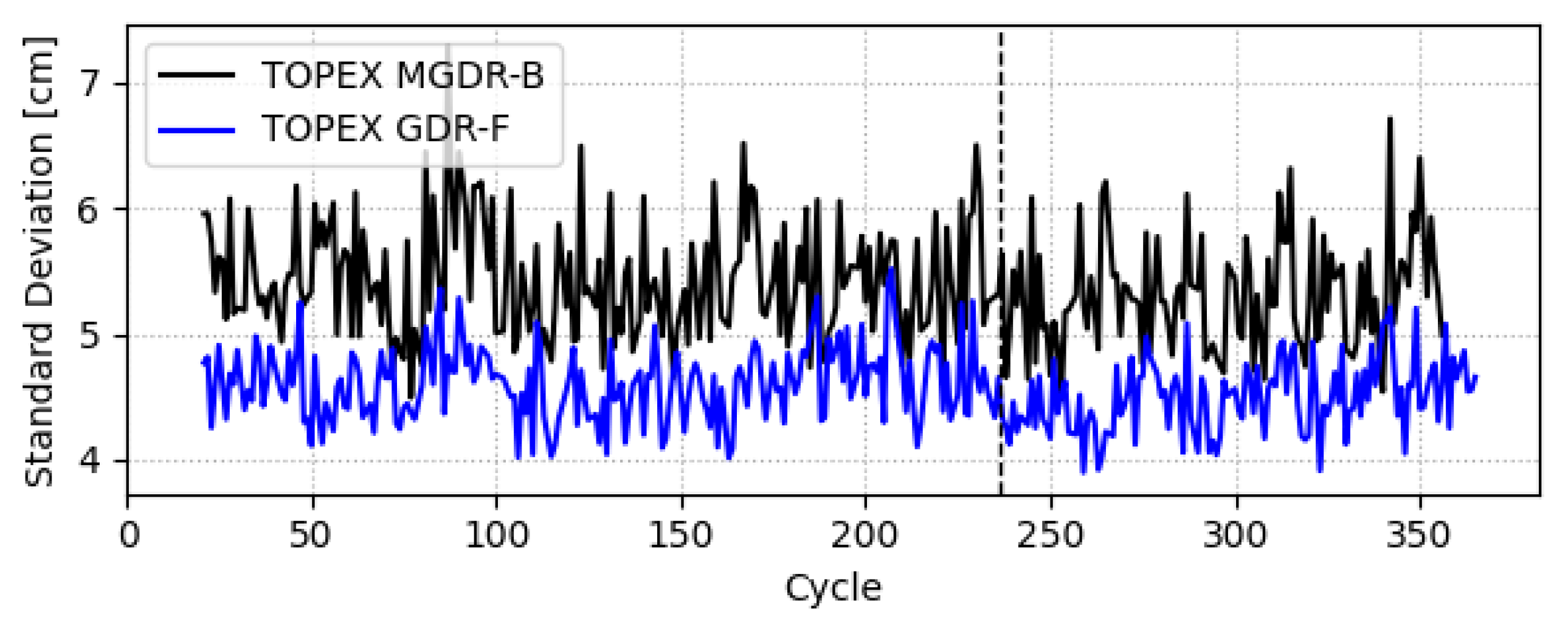
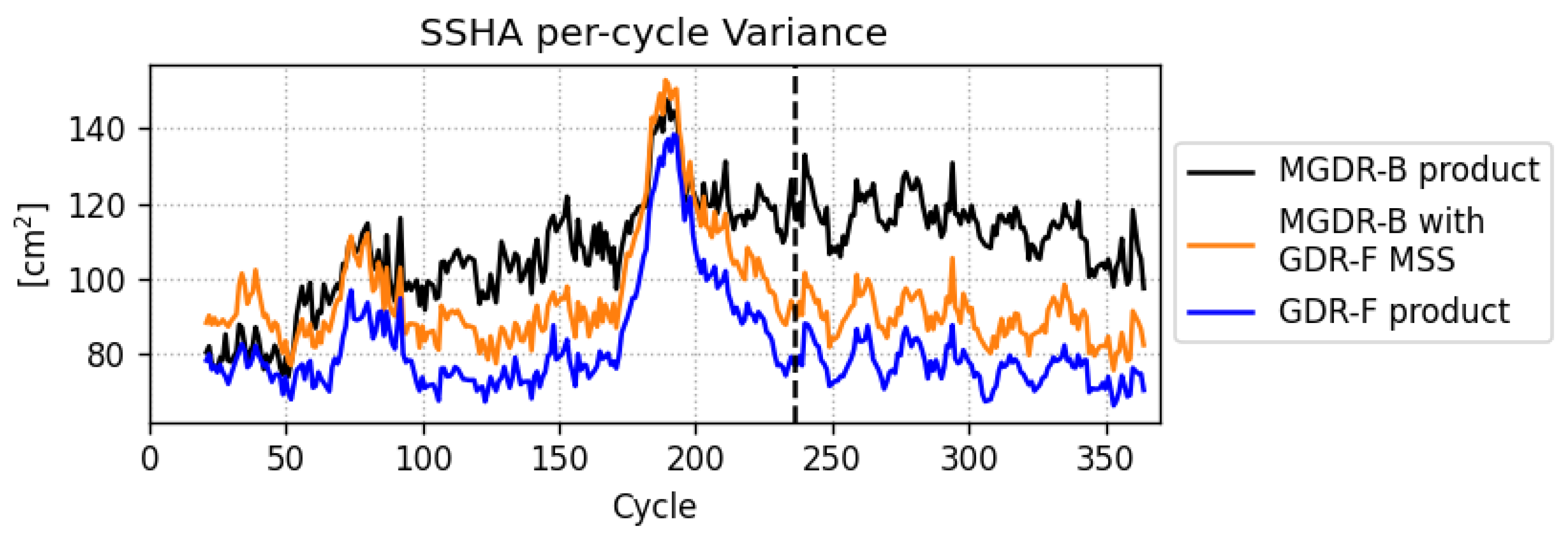
3.1.1. Crossover Analysis of Sea Surface Height Anomaly
3.1.2. Evolution of Along-Track Sea Surface Height Anomaly
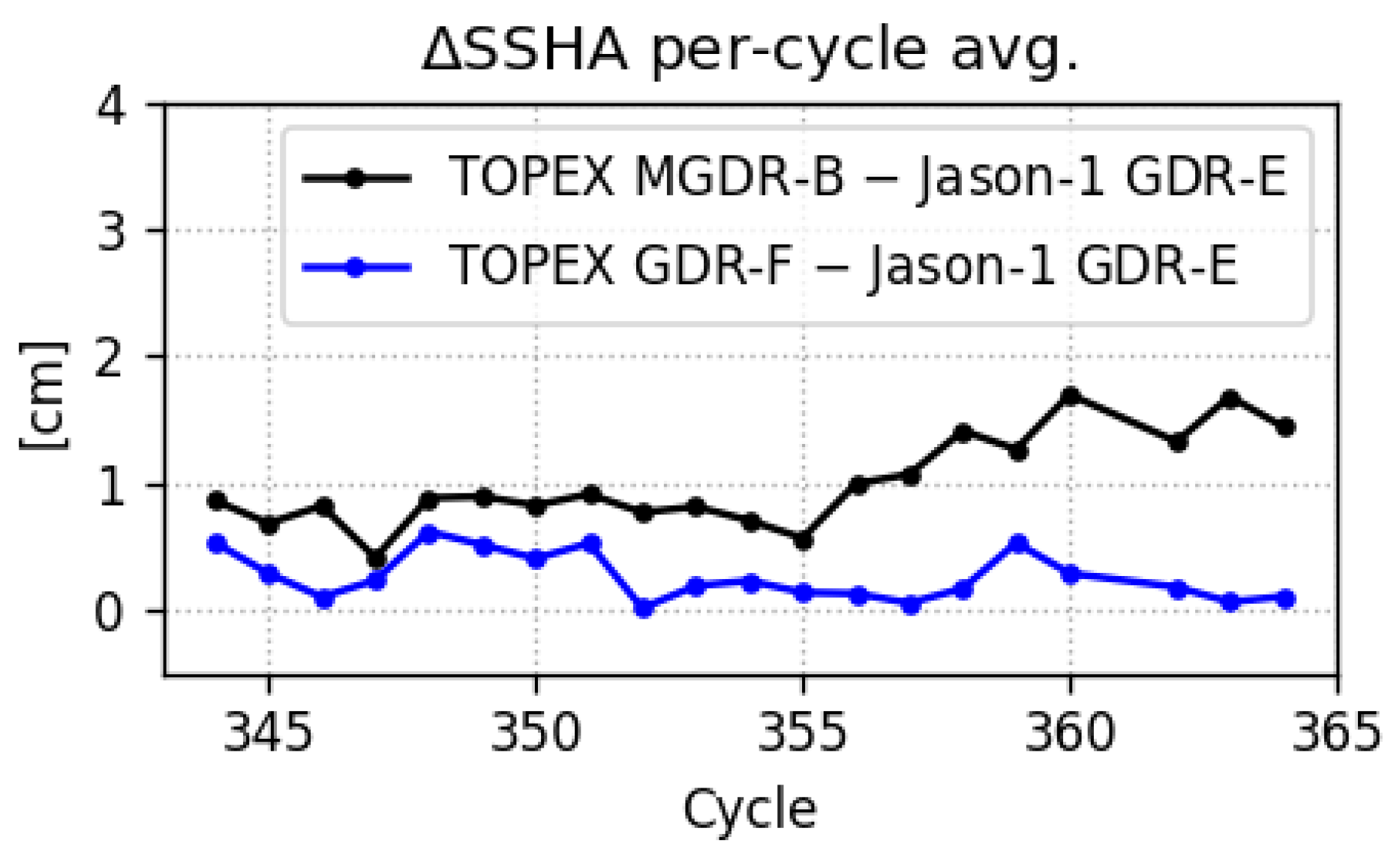
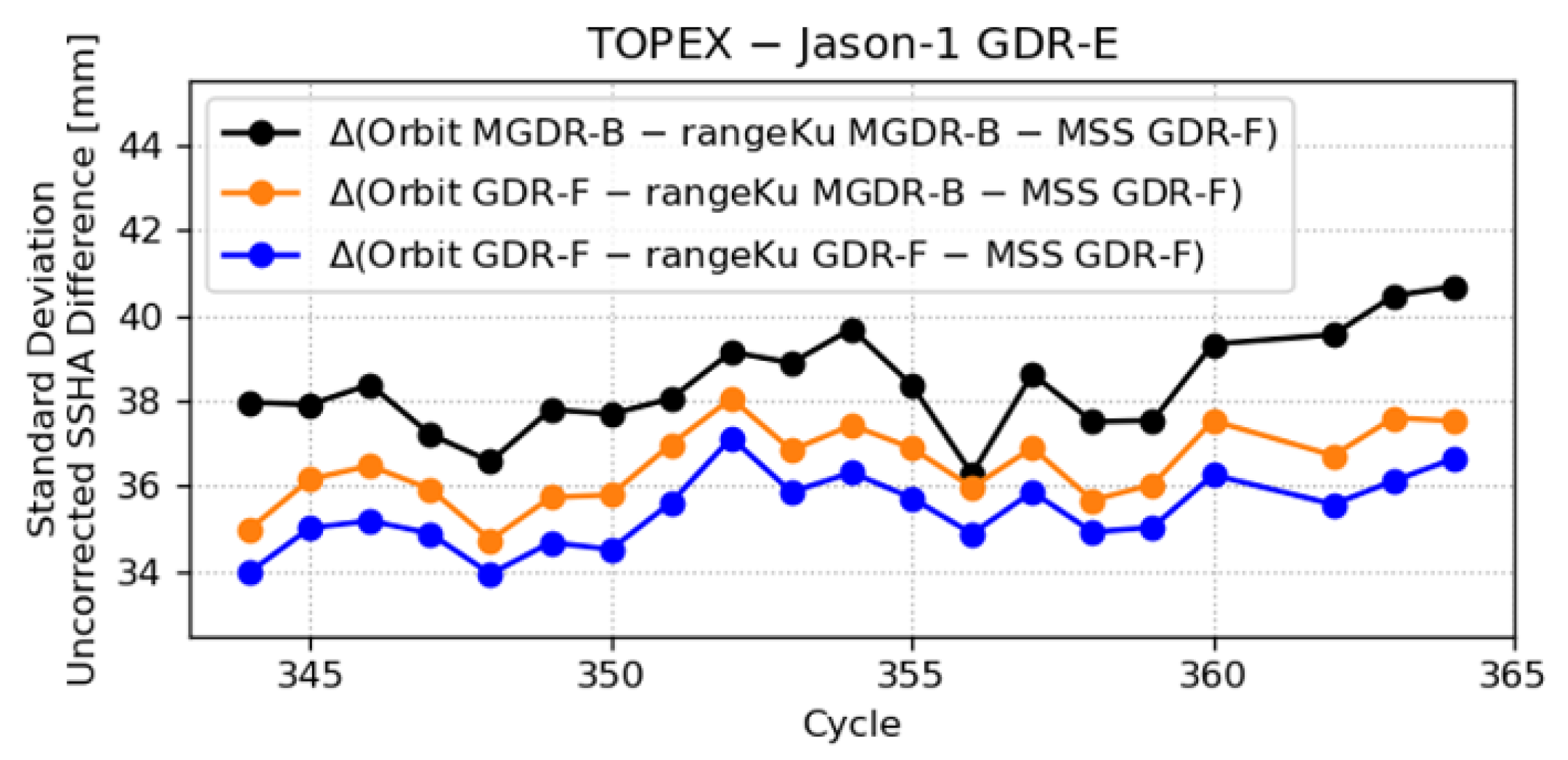
3.1.3. Comparison of the Sea Surface Height Anomaly Between TOPEX and Jason-1
3.2. Numerical Retracking and Impact on Derived Altimeter Parameters
3.2.1. Mitigation of Altimeter Drift Using Cal-1 Point Target Response
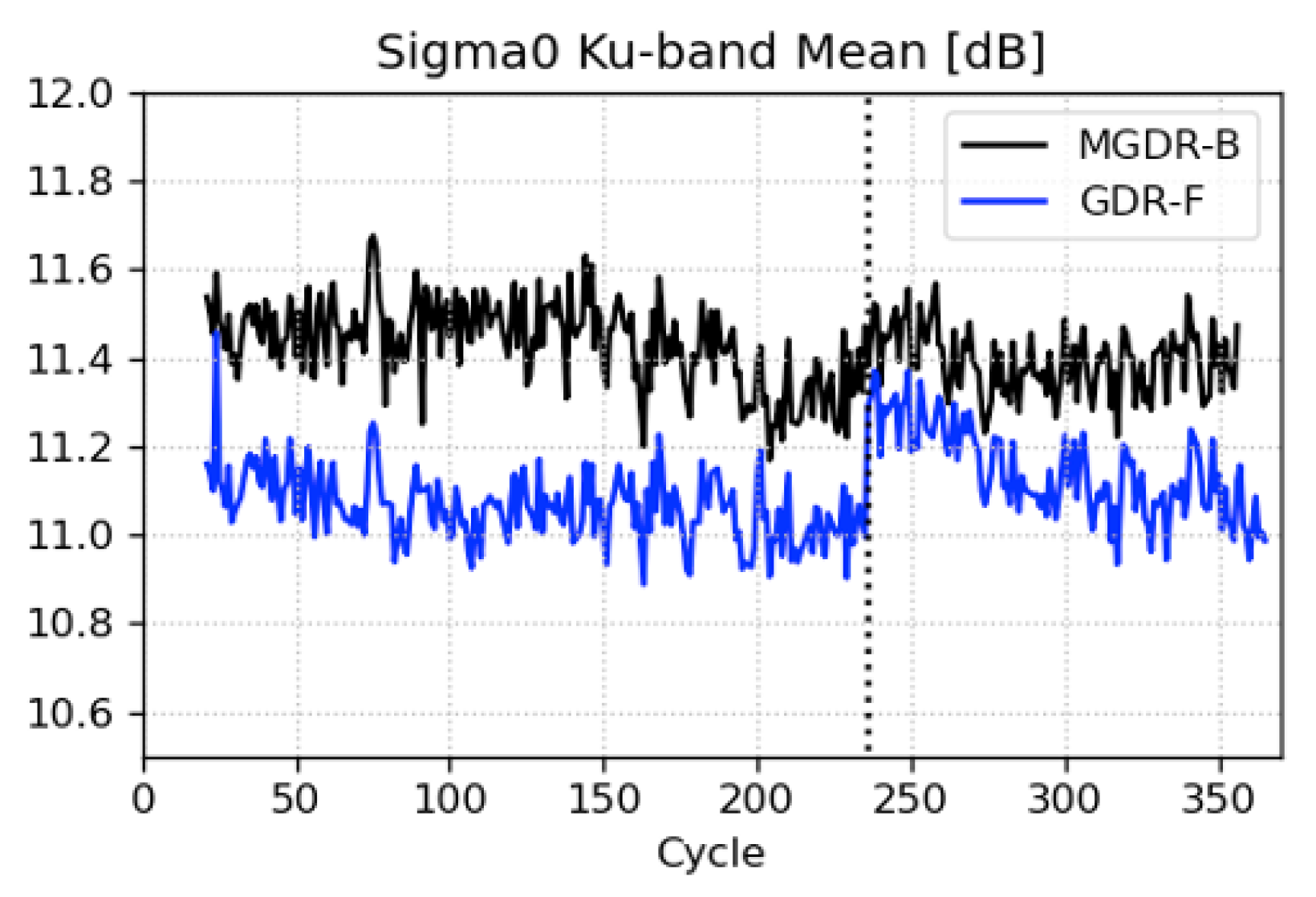
- The GDR-F sigma0 ranges within ±0.2 dB for side A, similar to MGDR-B.
- At the beginning of side B, a change in the altimeter configuration generated a drop in the sigma0 values, which spread across multiple cycles up to cycle 270 due to the smoothing window applied in the calibration for GDR-F.
- After cycle 270, the sigma0 timeseries stabilizes but shows small (0.2 dB) oscillations with an approximate 20-cycle period. These are related to the scheduled sweep PTR calibrations, which were performed monthly at the beginning of the mission and later once every cycle (starting from cycle 363), combined with applying a smoothing window to the calibration in the GDR-F processing [12].
3.2.2. Reduction of Hemispheric Bias by Cal-2 Correction of Waveforms
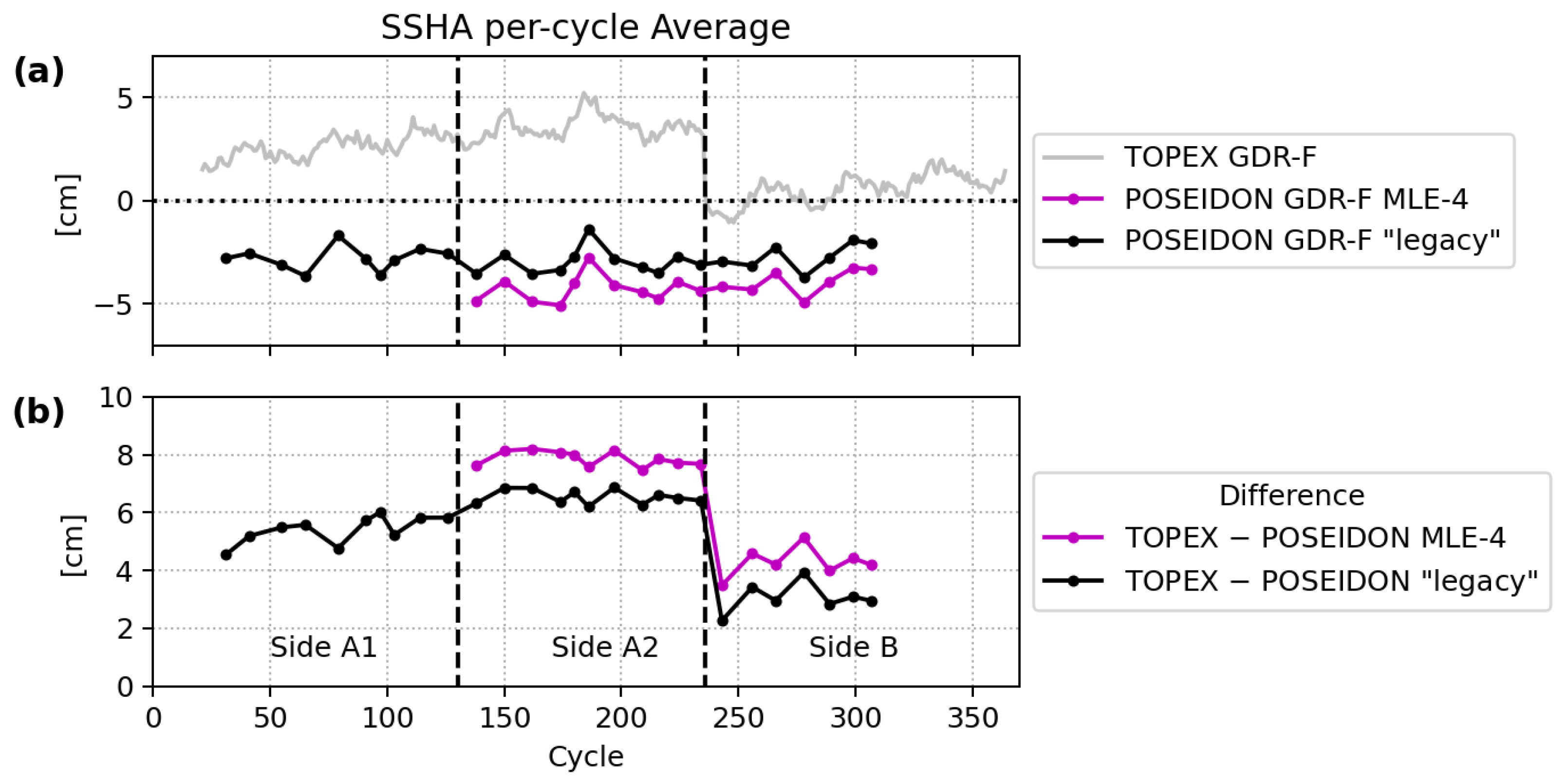
3.3. Performance of POSEIDON Sea Surface Height Anomaly Compared to TOPEX
3.3.1. POSEIDON Performance from Along-Track and Crossover Analysis
3.3.2. Biases Between TOPEX and POSEIDON Sea Surface Height Anomaly
3.4. TOPEX Microwave Radiometer
3.5. Orbit Ephemeris
4. Conclusions
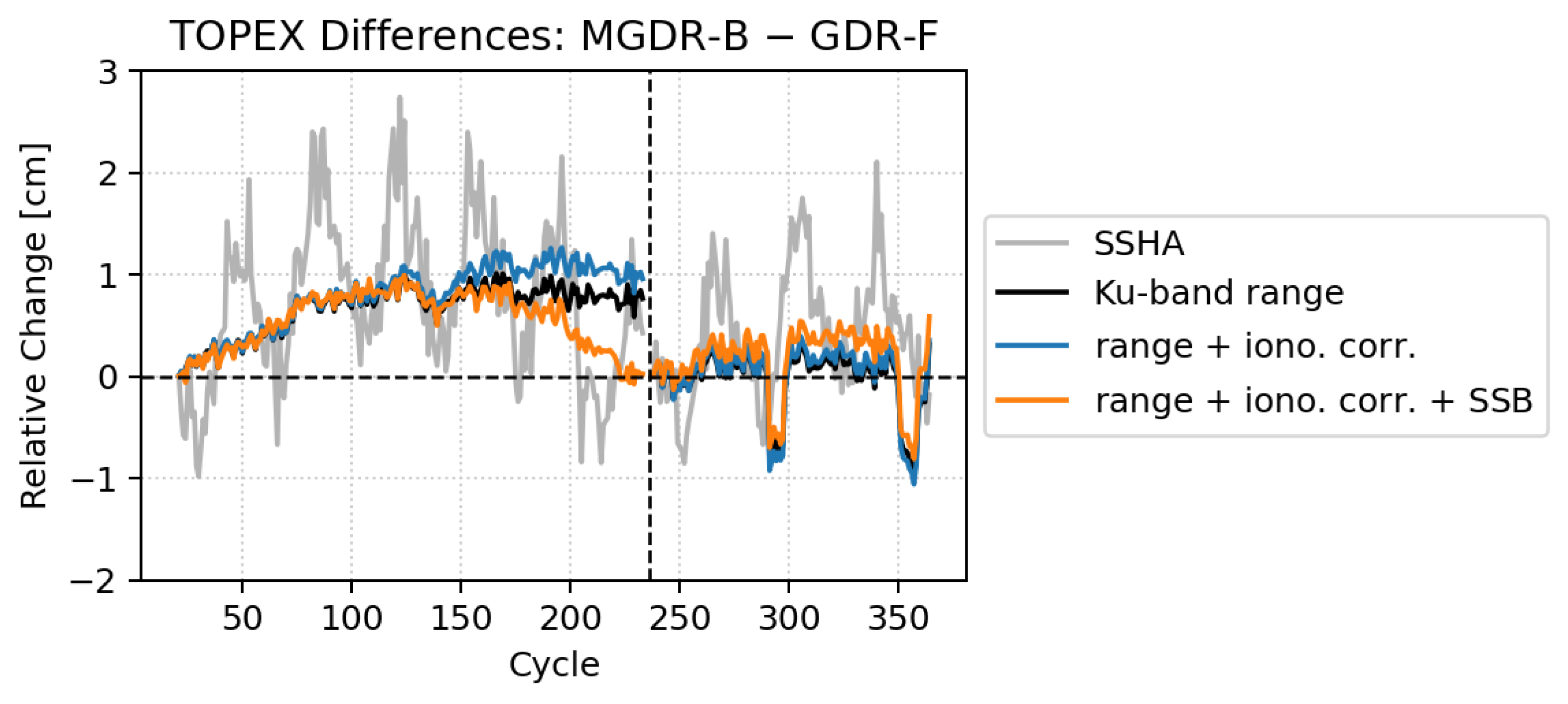
- Mitigation of the altimeter drift using Cal-1 PTR. This is reflected in improved estimates of range, Significant Wave Height (SWH), and sigma0, which makes the reprocessing independent of external calibrations such as the Wallops correction and yields improved temporal stability. The impact of the numerical retracking on the Ku-band range, ionospheric correction, and SSB (through the SWH) is significant. At the same time, their combined effect on the SSHA from the start to the end of side A cancels, and the impact on the sea level evolution from cycle 21 and 235 is therefore negligible. Accounting for the improved radiometer calibrations results in a net impact of 7 mm from the start to end of side A SSHA.
- Reduction of hemispheric bias by applying dedicated waveform filters during the Cal-2 correction. This significantly reduces hemispheric bias for the derived SWH and altimeter ranges. The impact on SSHA estimates is a reduction of the hemispheric bias of a 4 cm amplitude to less than 1 cm on average. We observed a significant relative drift of 2.6 mm/year between TOPEX and POSEIDON data up to cycle 130. The product handbook cautions users that GDR-F data from TOPEX side A are expected to have larger errors due to scarce Cal-1 sweep calibrations.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | MGDR-B | GDR-F | |
|---|---|---|---|
| Significant Wave Height | Onboard (TOPEX), retracked (POSEIDON) | Numerical retracking (TOPEX), new MLE-4 retracking for cycles 167–307 (POSEIDON) | |
| Altimeter Products | Range Correction | Wallops Cal-1 (TOPEX), Point Target Response monitoring (POSEIDON) | Numerical retracking (TOPEX), Point Target Response monitoring (POSEIDON) |
| Sigma0 Correction | Wallops climatological (TOPEX), Point Target Response monitoring (POSEIDON) | Numerical retracking (TOPEX), Point Target Response monitoring (POSEIDON) | |
| Altimeter Wind Speed | Witter et al., 1991 [33] | Ref. [34] with sigma0 calibration | |
| Sea State Bias Correction | Parametric [18] | Non-parametric for TOPEX: 2D SSB [14], 3D SSB [15]. Consistent with GDR-F dataset parametric solution for POSEIDON | |
| Orbit Solutions | Operational GSFC and CNES | GSFC (dpod2014v04) (F. Lemoine, pers. comm., 2023), CNES (POE-F) ITRF2014 (A. Couhert, pers. comm., 2023) | |
| Geoid | 1990s standards (with respect to TOPEX ellipsoid) | EGM2008 (with respect to WGS84) [35] | |
| Reference Ellipsoid | TOPEX ellipsoid | WGS84 (height difference with TOPEX ellipsoid provided) | |
| Mean Sea Surface | OSUMSS95 | CNES/CLS 2015 [25], DTU18 [36] (with respect to WGS84) | |
| Radiometer (TMR) Wet Path Delay | Uncalibrated | Computed using algorithms from [37], near-land path delay [17], end-of-mission calibration [16] | |
| Atmospheric Corrections | Dynamic Atmospheric Correction | Only inverse barometric correction, 1990s standards | Computed using Mog2D model ([38]; Greenberg and Lyard, pers. comm.) forced by ECMWF ERA-Interim [39] |
| Dry and Wet Troposphere Range Correction | ECMWF operational | ECMWF ERA-Interim reanalysis data [39] | |
| Ocean Tide | 1990s standards | FES2014b [40], GOT4.10c [41] | |
| Geophysical Corrections | Solid Earth Tide | 1990s standards | No change |
| Internal Tide | Not available | Computed using model (HRET8.1 [42]) | |
| Pole Tide | 1990s standards | Computed using model [43] with linear mean pole [44] |
References
- Fu, L.L.; Christensen, E.J.; Yamarone, C.A.J.; Lefebvre, M.L.; Menard, Y.; Dorrer, M.; Escudier, P. TOPEX/POSEIDON mission overview. J. Geophys. Res. 1994, 99, 24369–24381. [Google Scholar] [CrossRef]
- Rosmorduc, V.; Roinard, H.; Desai, S.D.; Desjonquères, J.D.; Callahan, P.S.; Bignalet-Cazalet, F. TOPEX/POSEIDON GDR-F Products Handbook. Technical Report. 2023. Available online: https://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_tpx_grdf.pdf (accessed on 15 June 2025).
- Menard, Y.; Fu, L.L.; Escudier, P.; Parisot, F.; Perbos, J.; Vincent, P.; Desai, S.D.; Haines, B.; Kunstmann, G. The Jason-1 Mission Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 131–146. [Google Scholar] [CrossRef]
- Lambin, J.; Morrow, R.; Fu, L.L.; Willis, J.; Bonekamp, H.; Lillibridge, J.; Perbos, J.; Zaouche, G.; Vaze, P.; Bannoura, W.; et al. The OSTM/Jason-2 Mission. Mar. Geod. 2010, 33, 4–25. [Google Scholar] [CrossRef]
- Vaze, P.; Neeck, S.; Bannoura, W.; Green, J.; Wade, A.; Mignogno, M.; Zaouche, G.; Couderc, V.; Thouvenout, E.; Parisot, F. The Jason-3 Mission: Completing the Transition of Ocean Altimetry from Research to Operations. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XIV, Toulouse, France, 20–23 September 2010; SPIE: Bellingham, WA, USA, 2010; Volume 7826, pp. 264–268. [Google Scholar]
- Donlon, C.J.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, C.R.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Nerem, R. Measuring global mean sea level variations using TOPEX/POSEIDON altimeter data. J. Geophys. Res. 1995, 100, 25135–25151. [Google Scholar] [CrossRef]
- Nerem, R.S.; Haines, B.J.; Hendricks, J.; Minster, J.F.; Mitchum, G.T.; White, W.B. Improved determination of global mean sea level variations using TOPEX/POSEIDON altimeter data. Geophys. Res. Lett. 1997, 24, 1331–1334. [Google Scholar] [CrossRef]
- Beckley, B.D.; Callahan, P.S.; Hancock, D.W.; Mitchum, G.T.; Ray, R.D. On the “Cal-Mode” correction to TOPEX satellite altimetry and its effect on the global mean sea level time series. J. Geophys. Res. Ocean. 2017, 122, 8371–8384. [Google Scholar] [CrossRef]
- Watson, C.S.; White, N.J.; Church, J.A.; King, M.A.; Burgette, R.J.; Legresy, B. Unabated global mean sea-level rise over the satellite altimeter era. Nat. Clim. Change 2015, 5, 565–568. [Google Scholar] [CrossRef]
- Benada, J.R. Merged GDR (TOPEX/POSEIDON) Generation B MGDR-B; Technical Report; Physical Oceanography Distributed Active Archive Center: Pasadena, CA, USA, 1997.
- Desjonquères, J.D.; Talpe, M.; Callahan, P.; Desai, S.; Willis, J. TOPEX data reprocessing using a numerical retracking approach. In Proceedings of the Ocean Surface Topography Science Team Meeting, Chicago, IL, USA, 21–25 October 2019. [Google Scholar]
- Thibaut, P.; Roinard, H.; Picot, N.; Guinle, T. Reprocessing of the Poseidon-1 French Altimeter dataset. In Proceedings of the Ocean Surface Topography Science Team Meeting, Ponta Delgada, Portugal, 24–29 September 2018. [Google Scholar]
- Putnam, A.; Desai, S.D.; Nerem, R.S. Estimation of the Sea State Bias Using the Interpolation Method and Applications to Inter-Mission Calibration. Mar. Geod. 2023, 46, 479–495. [Google Scholar] [CrossRef]
- Feng, H.; Vandemark, D.; Tran, N.; Desai, S. Sea state bias for retracked TOPEX altimeter data. In Proceedings of the 2019 Ocean Surface Topography Science Team Meeting, Chicago, IL, USA, 21–25 October 2019. [Google Scholar]
- Brown, S.; Desai, S.; Keihm, S.; Lu, W. Microwave radiometer calibration on decadal time scales using on-earth brightness temperature references: Application to the TOPEX Microwave Radiometer. J. Atmos. Ocean. Technol. 2009, 26, 2579–2591. [Google Scholar] [CrossRef]
- Brown, S. A novel near-land radiometer wet path-delay retrieval algorithm: Application to the Jason-2/OSTM advanced microwave radiometer. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1986–1992. [Google Scholar] [CrossRef]
- Gaspar, P.; Ogor, F.; Le Traon, P.Y.; Zanife, O.Z. Estimating the sea state bias of the TOPEX and POSEIDON altimeters from crossover differences. J. Geophys. Res. Ocean. 1994, 99, 24981–24994. [Google Scholar] [CrossRef]
- Boy, F.; Desjonquères, J.; Picot, N.; Moreau, T.; Raynal, M. CryoSat-2 SAR-mode over oceans: Processing methods, global assessment, and benefits. IEEE Trans. Geosci. Remote Sens. 2016, 55, 148–158. [Google Scholar] [CrossRef]
- Amarouche, L.; Thibaut, P.; Zanife, O.Z.; Dumont, J.P.; Vincent, P.; Steunou, N. Improving the Jason-1 ground retracking to better account for attitude effects. Mar. Geod. 2004, 27, 171–197. [Google Scholar] [CrossRef]
- Thibaut, P.; Poisson, J.C.; Bronner, E.; Picot, N. Relative Performance of the MLE3 and MLE4 Retracking Algorithms on Jason-2 Altimeter Waveforms. Mar. Geod. 2010, 33, 317–335. [Google Scholar] [CrossRef]
- Bignalet-Cazalet, F.; Maraldi, C.; Cadier, E.; Boy, F.; Guerou, A.; Courcol, B.; Moreau, T.; Dinardo, S.; Martin-Puig, C.; Meloni, M.; et al. Sentinel-6 PDAP products assessment over ocean. In Proceedings of the 2022 Ocean Surface Topography Science Team Meeting, Venice, Italy, 31 October–4 November 2022; p. 275. [Google Scholar] [CrossRef]
- Nilsson, J.; Desai, S.D.; Desjonquères, J.D.; Haines, B. Global cross-calibration of the Jason-3 and Sentinel-6 Michael Freilich missions during their tandem period. In Proceedings of the Ocean Surface Topography Science Team Meeting, Venice, Italy, 31 October–4 November 2022. [Google Scholar] [CrossRef]
- Roinard, H.; Bignalet-Cazalet, F.; Picot, F.; Piras, F.; Coquelin, J. Jason-3 GDR-F mission performances over ocean. In Proceedings of the Ocean Surface Topography Science Team Meeting, Venice, Italy, 31 October–4 November 2022. [Google Scholar] [CrossRef]
- Pujol, M.I.; Schaeffer, P.; Faugère, Y.; Raynal, M.; Dibarboure, G.; Picot, N. Gauging the improvement of recent mean sea surface models: A new approach for identifying and quantifying their errors. J. Geophys. Res. Ocean. 2018, 123, 5889–5911. [Google Scholar] [CrossRef]
- Hayne, G.S.; Hancock, D.W., III; Purdy, C.L.; Callahan, P.S. The corrections for significant wave height and attitude effects in the TOPEX radar altimeter. J. Geophys. Res. 1994, 99, 24941–24955. [Google Scholar] [CrossRef]
- Hancock, D.W.; Hayne, G.S.; Brooks, R.L.; Lee, J.E.; Lockwood, D.W. TOPEX Radar Altimeter Engineering Assessment Report Update: From Launch to Turn-Off of Side-A on 10 February 1999; Technical Report NASA/TM-2003-213336/Vol.12; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 1999.
- Imel, D. Evaluation of the TOPEX dual-frequency ionosphere correction. J. Geophys. Res. 1994, 99, 24895–24905. [Google Scholar] [CrossRef]
- Mannucci, A.; Wilson, B.; Yuan, D.; Ho, C.; Lindqwister, U.; Runge, T. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Ablain, M.; Philipps, S. TOPEX/POSEIDON Validation Activities. 13 Years of T/P Data (GDR-Ms); Technical report; AVISO: Ramonville St-Agne, France, 2006. [Google Scholar]
- Quet, V.; Octau, F.; Mangilli, A.; Prandi, P.; Meyssignac, B.; Ablain, M.; Dibarboure, G. Estimation of the TOPEX A/TOPEX B bias—A multi methods approach. In Proceedings of the OSTST 2023, San Juan, Puerto Rico, 7–11 November 2023. [Google Scholar]
- Ruf, C. Detection of calibration drifts in spaceborne microwave radiometer using a vicarious cold reference. IEEE Trans. Geosci. Remote Sens. 2000, 38, 44–52. [Google Scholar] [CrossRef]
- Witter, D.L.; Chelton, D.B. A Geosat altimeter wind speed algorithm and a method for altimeter wind speed algorithm development. J. Geophys. Res. 1991, 96, 8853–8860. [Google Scholar] [CrossRef]
- Collard, F.; Labroue, S. New wind speed algorithms for Jason-1, 2004. In Proceedings of the Ocean Surface Topography Science Team Meeting, St. Petersburg, FL, USA, 4–6 November 2004. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117, B04406. [Google Scholar] [CrossRef]
- Andersen, O.A.; Knudsen, P.; Stenseng, L. The DTU18 MSS mean sea surface-technical description. In Proceedings of the 2018 Ocean Surface Topography Science Team Meeting, Ponta Delgada, São Miguel Island, Azores Archipelago, Portugal, 24–28 September 2018. [Google Scholar]
- Keihm, S.; Janssen, M.; Ruf, C. TOPEX/POSEIDON microwave radiometer (TMR): III. Wet troposphere range correction algorithm and pre-launch error budget. IEEE Trans. Geosci. Remote Sens. 1995, 33, 147–161. [Google Scholar] [CrossRef]
- Lynch, D.; Gray, W. A wave equation model for finite element tidal computations. Comput. Fluids 1979, 7, 207–228. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, D.P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Carrère, L.; Lyard, F.; Cancet, M.; Guillot, A.; Picot, N. FES 2014, a new tidal model—Validation results and perspectives for improvements. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; pp. 9–13. [Google Scholar]
- Ray, R. Precise comparisons of bottom-pressure and altimetric ocean tides. J. Geophys. Res. Ocean. 2013, 118, 4570–4584. [Google Scholar] [CrossRef]
- Zaron, E.D. Baroclinic tidal sea level from exact-repeat mission altimetry. J. Phys. Oceanogr. 2019, 49, 193–210. [Google Scholar] [CrossRef]
- Desai, S.; Wahr, J.; Beckley, B. Revisiting the pole tide for and from satellite altimetry. J. Geod. 2015, 89, 1233–1243. [Google Scholar] [CrossRef]
- Ries, J.C.; Desai, S.D. Conventional model update for rotational deformation. In Proceedings of the Fall AGU Meeting, New Orleans, LA, USA, 11–15 December 2017. [Google Scholar]









| Side A [cm] | Side B [cm] | |||||
|---|---|---|---|---|---|---|
| Offset | Peak | End | Offset | Peak | End | |
| SSHA | 1.4 | 2.7 | 0.3 | −1.1 | 2.0 | −0.2 |
| Range | 2.2 | 1.0 | 0.8 | 0.5 | 0.3 | 0.3 |
| Range + Iono | 2.2 | 1.3 | 1.0 | 0.3 | 0.3 | 0.4 |
| Range + Iono + SSB | 5.0 | 1.0 | 0.0 | 2.4 | 0.6 | 0.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forster, L.; Desjonquères, J.-D.; Talpe, M.; Desai, S.D.; Roinard, H.; Bignalet-Cazalet, F.; Callahan, P.S.; Willis, J.K.; Picot, N.; Shirtliffe, G.M.; et al. Global Validation of the Version F Geophysical Data Records from the TOPEX/POSEIDON Altimetry Satellite Mission. Remote Sens. 2025, 17, 2418. https://doi.org/10.3390/rs17142418
Forster L, Desjonquères J-D, Talpe M, Desai SD, Roinard H, Bignalet-Cazalet F, Callahan PS, Willis JK, Picot N, Shirtliffe GM, et al. Global Validation of the Version F Geophysical Data Records from the TOPEX/POSEIDON Altimetry Satellite Mission. Remote Sensing. 2025; 17(14):2418. https://doi.org/10.3390/rs17142418
Chicago/Turabian StyleForster, Linda, Jean-Damien Desjonquères, Matthieu Talpe, Shailen D. Desai, Hélène Roinard, François Bignalet-Cazalet, Philip S. Callahan, Josh K. Willis, Nicolas Picot, Glenn M. Shirtliffe, and et al. 2025. "Global Validation of the Version F Geophysical Data Records from the TOPEX/POSEIDON Altimetry Satellite Mission" Remote Sensing 17, no. 14: 2418. https://doi.org/10.3390/rs17142418
APA StyleForster, L., Desjonquères, J.-D., Talpe, M., Desai, S. D., Roinard, H., Bignalet-Cazalet, F., Callahan, P. S., Willis, J. K., Picot, N., Shirtliffe, G. M., & Guinle, T. (2025). Global Validation of the Version F Geophysical Data Records from the TOPEX/POSEIDON Altimetry Satellite Mission. Remote Sensing, 17(14), 2418. https://doi.org/10.3390/rs17142418