All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
Since 2020, the BDS-3 has been providing real-time corrections via the B2b signal, enabling users in China and its neighboring regions to achieve kinematic positioning accuracy at the decimeter level. The rapid geometric changes of Low-Earth-Orbit (LEO) satellites facilitate the rapid resolution of phase ambiguities and accelerate the convergence of Precise Point Positioning (PPP). Therefore, this study proposes an LEO-enhanced BDS-3 PPP-B2b positioning model. Firstly, a novel BDS-3 PPP model accounting for satellite clock bias characteristics is proposed, and experimental validation confirms its efficacy. Subsequently, an LEO-enhanced BDS-3 PPP model is developed. Finally, the positioning performance is rigorously evaluated using combined LEO simulation observations and BDS-3 observations. The results indicate that, compared with the traditional PPP model, the new model yields an average convergence time of 25.1 min for experiments where the convergence criterion is jointly satisfied, representing a 35.6% improvement in convergence speed, while maintaining the same positioning accuracy after convergence. When augmented with LEO satellites, the convergence time of the BDS-3 PPP-B2b solution is reduced to less than 2 min. Furthermore, when more than three LEO satellites are available, the mean convergence time is shortened to within 1 min.
Precise Point Positioning (PPP) technology has demonstrated significant application value in fields such as precise positioning, timing, and water vapor monitoring [1,2,3,4], owing to its advantages of enabling the acquisition of high-precision position, clock bias, and atmospheric delay information on a global scale using only a single receiver. With the advancement of industries, including autonomous driving, precision agriculture, and marine development, the demand for high-precision positioning in social production and daily life has undergone an accelerated transition from the conventional post-processing paradigm to real-time dynamic applications in the last few years. Since 2020, the BeiDou-3 Global Navigation Satellite System (BDS-3) has offered the PPP-B2b service, a real-time PPP augmentation solution, to meet the demands of Global Navigation Satellite System (GNSS) high-precision real-time applications. Unlike the traditional mode employed by the Real-Time Service (RTS) of the International GNSS Service (IGS), which disseminates real-time corrections to global users via the internet [5], the PPP-B2b service provided by the BDS-3 is embedded within Geostationary-Earth-Orbit (GEO) satellites. This configuration enables the service to extend its coverage to regions with weak or absent communication infrastructure, such as oceans, deserts, and plateaus. It is noteworthy that similar satellite-based regional PPP services have been developed by Galileo and the Quasi-Zenith Satellite System (QZSS) [6]. In the commercial sector, real-time PPP service systems such as TerraStar-D [7] and NavCom’s StarFire System [8] have also reached a relatively mature stage, yet they come with relatively high costs. Integrated into the BDS-3 as a standard offering, the PPP service eliminates the need for internet connectivity while remaining freely accessible. Currently, it is capable of providing PPP services to users in China and its surrounding regions, as well as to users in near-Earth space extending up to 1000 km above the Earth’s surface [9], attracting widespread attention.
Currently, the PPP-B2b service disseminates three types of corrections through its navigation signals. Among these, the corrections for orbit and clock biases currently support both GPS and the BDS-3, while the code bias corrections are specific to the BDS-3 [10]. Comprehensive evaluations of the positioning performance and product accuracy of the PPP-B2b service have been conducted by scholars both domestically and internationally. In terms of positioning performance evaluation, for dual-frequency PPP, dynamic decimeter-level and static centimeter-level positioning accuracy can be achieved based on the PPP-B2b corrections [11,12]. Zhou et al. conducted an evaluation of the positioning performance of single-frequency PPP augmented by PPP-B2b corrections. Their findings indicated static positioning accuracy within 10 cm, while kinematic solutions achieved better than 30 cm [13]. Zang et al. validated the performance of PPP-B2b in real-time coseismic displacement monitoring by analyzing GNSS observations collected during the 2021 Mw 7.4 Maduo earthquake, revealing that single-station positioning results derived from BDS-3 PPP-B2b achieved accuracies of 0.5 cm, 0.6 cm, and 0.9 cm in the North (N), East (E), and Up (U) components, respectively [14]. The study conducted by Wu et al. further elucidated the positioning performance characteristics of the PPP-B2b service under various motion states. Testing conducted on low-velocity moving objects demonstrated that while the average convergence time for dual-frequency PPP relying exclusively on the BDS-3 was 28.5 min, employing a combined BDS-3 + GPS dual-system configuration notably reduced this convergence time to 12.9 min. For highly dynamic airborne platforms, the convergence time extended to 48.9 min, but following convergence, the positioning errors were constrained to less than 20 cm and 35 cm in the horizontal and vertical directions, respectively [15]. These empirical studies not only validate the reliability of the PPP-B2b service across diverse application scenarios but also underscore its vast potential for widespread adoption in multi-dimensional positioning applications spanning land, maritime, and aerial domains.
In the realm of product accuracy evaluation, multiple studies have conducted systematic analyses on the performance of real-time products derived from the BDS-3 PPP-B2b service [11,12]. Liu et al. employed post-processed precise products of the GFZ as a reference benchmark to conduct a comparative assessment of the accuracy disparities among the PPP-B2b real-time products, broadcast ephemerides, and real-time products generated by Wuhan University (WHU). The average Root Mean Square (RMS) values for PPP-B2b orbit components are 8.5 cm (radial), 19.3 cm (along-track), and 14.0 cm (cross-track). While the PPP-B2b orbit exhibits superior continuity and slightly higher accuracy compared to broadcast ephemerides, its precision falls slightly short of that of the real-time orbits generated by WHU, primarily due to the PPP-B2b service’s reliance solely on China’s regional monitoring stations. Regarding satellite clock biases, the Standard Deviation (STD) remains below 0.2 ns, significantly outperforming broadcast ephemeris clock biases (0.672 ns) and achieving a comparable accuracy level to WHU’s real-time products. Compared to the Chinese Academy of Sciences (CAS) Differential Code Bias (DCB) products, the PPP-B2b DCB corrections show stable 0.5 ns STD values across B1Cp, B1I, and B2ap signals, confirming the service’s technical robustness [12]. Nevertheless, the study identified that satellite-dependent systematic biases are inherent in the satellite clock bias products of PPP-B2b, resulting in a substantial increase in the RMS of clock bias errors and consequently amplifying the Signal-in-Space Range Error (SISRE) [12,16,17,18]. In PPP, satellite-dependent systematic biases embedded within phase observation equations can be absorbed by the ambiguity parameters, leaving the positioning accuracy post convergence unaffected [18]. However, for the code observation equations, these biases are assimilated into the residuals, and their impact on the performance of PPP-B2b services needs further investigation. Xu et al. modeled and estimated the SISRE for individual satellites, leading to faster convergence and better positioning accuracy [19]. The SISRE encompasses the combined effects of orbital and clock biases, with the latter playing a pivotal, deterministic role in shaping the SISRE performance of the BDS-3 [16,18].
Consequently, the proper handling of systematic biases inherent in satellite clock offsets is of paramount significance for optimizing the performance of the PPP-B2b service. Due to the convergence process of PPP in dynamic applications, instantaneous high-precision positioning is difficult to achieve with the PPP-B2b service. Moreover, the capability for rapid re-convergence stands as a critical technical bottleneck that underpins the continuity of real-time high-precision positioning. In recent years, Low-Earth-Orbit (LEO) constellations have witnessed vigorous development, with foreign constellations, such as Iridium, OneWeb, and SpaceX’s Starlink, and domestic Chinese constellations, including the “Hongyan”, the “Hongyun”, and the “CentiSpace” constellations, among others [20,21]. The development of LEO constellations is also poised to change the service models and performance of satellite-based PPP. Beyond broadcasting navigation signals, LEO satellites can also transmit augmentation corrections that reduce the “South Wall Effect” [22] and enhance service coverage. Given their high orbital velocity, the geometric configurations between adjacent epochs change rapidly, which facilitates the swift resolution of phase ambiguities. By working synergistically with the BDS-3, they are expected to significantly enhance the convergence speed of PPP [23,24,25].
However, current research is notably deficient in exploring the impact of LEO satellites on the positioning performance of the BDS-3 with PPP-B2b service. To address this specific research need, this paper initially conducts a systematic analysis of the characteristics inherent in the clock bias corrections of the PPP-B2b service. Subsequently, it introduces an innovative BDS-3 PPP model that explicitly incorporates the properties of satellite clock biases. Building upon this, an LEO-enhanced BDS-3 PPP model is developed. Ultimately, a comprehensive evaluation of the enhancement effects of LEO constellations on the PPP of the BDS-3 with PPP-B2b service is carried out, utilizing both simulated LEO data and actual BDS-3 observational data. It aims to provide a theoretical foundation for optimizing the PPP of the PPP-B2b service and to offer references for the engineering applications of the BDS in the field of real-time precise positioning.
2. PPP Model
2.1. GNSS Traditional PPP Model
The ionospheric-free (IF) combination PPP model leverages the frequency-dependent nature of ionospheric delays to effectively eliminate the first-order ionospheric delay effects [26], which are used in this paper. Consequently, when employing this traditional model for PPP, after applying error corrections and reparameterization, the combination observation equation can be expressed as follows:
with
Here, the subscripts and indicate different frequency bands, while refers to the receiver. The superscripts and identify the specific satellite and the satellite system (where C and L specifically denote the BDS and LEO systems, respectively). refers to the geometric distance between the station and the satellite. IF-combined code and phase observations are given by and , respectively. The receiver and satellite clock biases are represented as and , while and correspond to the IF-combined code hardware delays for the receiver and satellite, respectively. The uncalibrated phase delay (UPD) for the receiver and satellite is denoted by and , respectively. The signal frequency is , is the IF-combined wavelength, and is the speed of light. The measurement errors, multipath effect, and unmodeled errors for code and phase observations are encapsulated in and . The integer ambiguity for frequency bands or is . Additionally, tropospheric delays include the zenith wet delay and its mapping function . Other unlisted errors in the observation equation, such as antenna phase center errors (both satellite and receiver), the relativistic effect, tidal displacements, and phase wind-up, are corrected using corresponding models. It is noteworthy that since the reference benchmark for PPP-B2b clock bias corrections is anchored to the B3 frequency band, it is necessary to utilize the code bias corrections provided by the PPP-B2b service to reference the satellite clock bias products to the frequency corresponding to the observations being used.
2.2. LEO-Enhanced BDS-3 PPP Model with B2b Service
The PPP-B2b signal is designed for the four major GNSSs to provide PPP services, namely GPS, GLONASS, Galileo, and BDS. For the methodologies regarding BDS satellite orbit corrections, code bias corrections, and clock bias corrections, reference should be made to the official document [10], and a detailed description will not be given here. It has been found that there exists a constant bias in the satellite clock bias products of PPP-B2b, which is related to code observations. When using phase observations for PPP, satellite-specific systematic errors can be absorbed by the ambiguities and have no impact on the positioning accuracy after convergence [18]. However, in the code observation equation, these errors are incorporated into the residuals, potentially impacting the PPP convergence time. Therefore, this paper proposes a PPP model that accounts for the correction of the constant bias in the satellite clock bias products of PPP-B2b. Specifically, in code observation equations, the impact of the constant clock bias of each satellite is defined and estimated as a constant, while it is estimated jointly with the ambiguities in phase observation equations.
In the equation, not only encompasses the impact of the constant bias in satellite clock bias but also includes error terms associated with receiver-related hardware delays, orbital errors, observation errors, and other unmodeled errors. The ambiguity parameter comprises both and the impact of the constant bias.
Experimental validation was conducted using both simulated LEO observation data and real BDS observations. For the simulated LEO observation data at ground stations, major modeled errors, including satellite clock biases, tidal corrections, relativistic effects, and phase wind-ups, were incorporated. Consequently, the PPP-B2b observation equation for the LEO-enhanced BDS-3 was formulated as follows:
The symbols in this equation are identical to those in the preceding equations.
3. Data Processing Method
Data processing was conducted by selecting Multi-GNSS Experiment (MGEX) stations within the PPP-B2b service coverage area and utilizing a simulated dynamic approach in PPP. A comprehensive overview of the processing strategy of PPP is presented in Table 1. A piece-wise constant estimation method was adopted for the parameter :
When a satellite is newly incorporated into the solution, the parameter
is initialized. Subsequently, when the satellite remains available with uninterrupted clock bias corrections, the satellite-specific constant clock bias is treated as a fixed value for estimation. The estimated value of and its variance are stored, with the constant bias separated to mitigate its impact on the parameters to be estimated.
When the satellite becomes unavailable, the last-computed value of
and its associated variance are retained. Upon the re-availability of the satellite, the continuity of the satellite’s clock bias corrections is evaluated. In scenarios where the clock bias corrections remain uninterrupted, the retained value of and its variance are incorporated as initial values within a constant estimation strategy. Conversely, in the event of discontinuous clock bias corrections, undergoes reinitialization, thereby discarding the previously retained value and variance without any form of inheritance.
For the parameter associated with the BDS-3 satellite, the initial variance is set to an empirical value of 25 m2, and the initial value is assigned as 0.6 m.
Regarding the simulation of the LEO satellite, the following points require clarification. The orbital simulation of the LEO constellation is conducted utilizing the Keplerian orbital elements. In the process of numerical orbit integration, comprehensive consideration is given to common perturbative forces, encompassing lunar and solar gravitational perturbations, multi-body gravitational interactions, and the Earth’s non-spherical gravitational effects. Satellite clock bias is simulated using zero-mean Gaussian white noise. For the modeling of tropospheric delay, the Saastamoinen model and the Global Mapping Function (GMF) model are utilized. Given that the ionospheric-free combined PPP model is adopted, the impact of high-order ionospheric delay can be disregarded. Consequently, ionospheric delay errors are not incorporated into the simulation. For LEO satellites, precise ephemerides are employed, and the precise clock bias products of LEO contain no constant clock bias. However, the constant bias in satellite clock bias is intentionally included as an estimated parameter in PPP for the LEO satellite to investigate the enhancement effect of the LEO constellation on the BDS-3 under the hypothetical scenario where LEO clock products do contain such a bias—even though its theoretical value remains zero for LEO satellites in the experiment. The bias parameter is set to 10−3 m while maintaining the initial variance at 25 m2.
4. Experimental Analysis
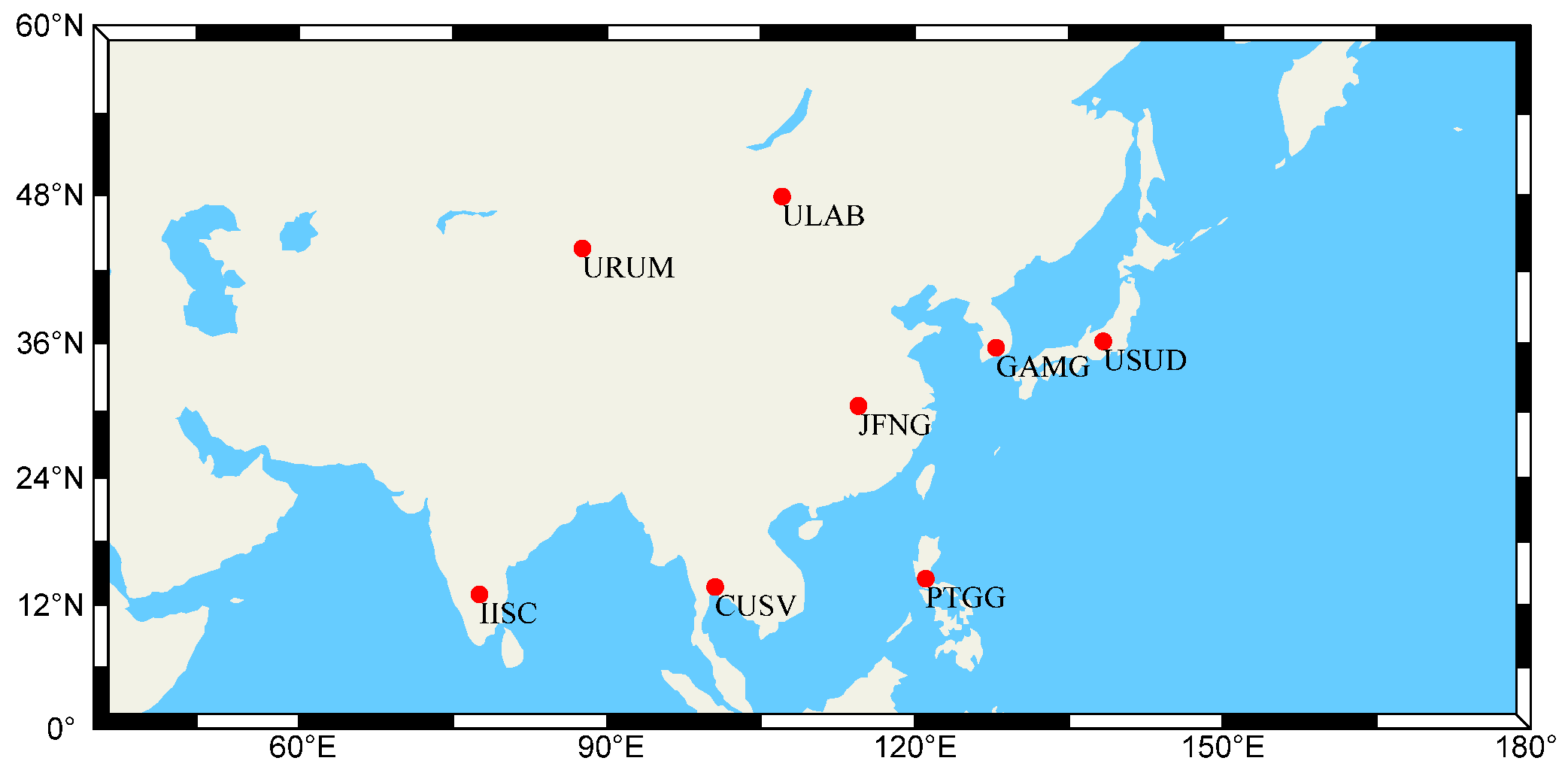
Eight stations within the PPP-B2b service coverage area are selected for experimental validation, with their geographical distribution and detailed metadata illustrated in Figure 1 and Table 2, respectively. To assess the performance of the PPP-B2b service, BDS-3 Medium-Earth-Orbit (MEO) satellites are employed as the primary observation source. The subsequent study focuses on three key aspects: the characterization of PPP-B2b clock bias products, the validation of the newly proposed PPP model, and positioning performance improvements when integrating LEO satellites into the BDS-3 with PPP-B2b service.
4.1. Characterization of B2b Satellite Clock Bias Products
The experiment collected PPP-B2b correction data for a one-week period from Day of Year (DOY) 211 to 217, 2023. Using precise clock products of WUM as the reference, the clock bias product reference of PPP-B2b was transformed from the B3I frequency to the B1I/B3I ionosphere-free combination consistent with the WUM product, leveraging the clock bias corrections and code bias corrections provided by the PPP-B2b service [17]. Subsequently, the double-differenced clock biases were computed to analyze the characteristics of clock bias products for common satellites of WUM and PPP-B2b. First, a single-difference operation was performed between the PPP-B2b and WUM clock biases for the same satellites, expressed as
There exist datum biases among the precise clock products from different analysis centers, which are common to all satellites within the same epoch. The datum bias in accuracy assessments is typically mitigated by differencing either a specific satellite’s clock biases or the mean clock biases of all satellites. Since PPP-B2b only provides corrections for satellites within its service coverage area and lacks continuous satellite tracking capability, the mean-differencing approach is adopted to eliminate the impact of datum biases. Supposing a total of satellites are observed, the double-differenced clock bias formula is derived as follows:
To mitigate the discontinuities in the double-differenced clock bias sequence caused by satellites entering or exiting the observation area, the following smoothing formula is applied to the raw double-differenced results:
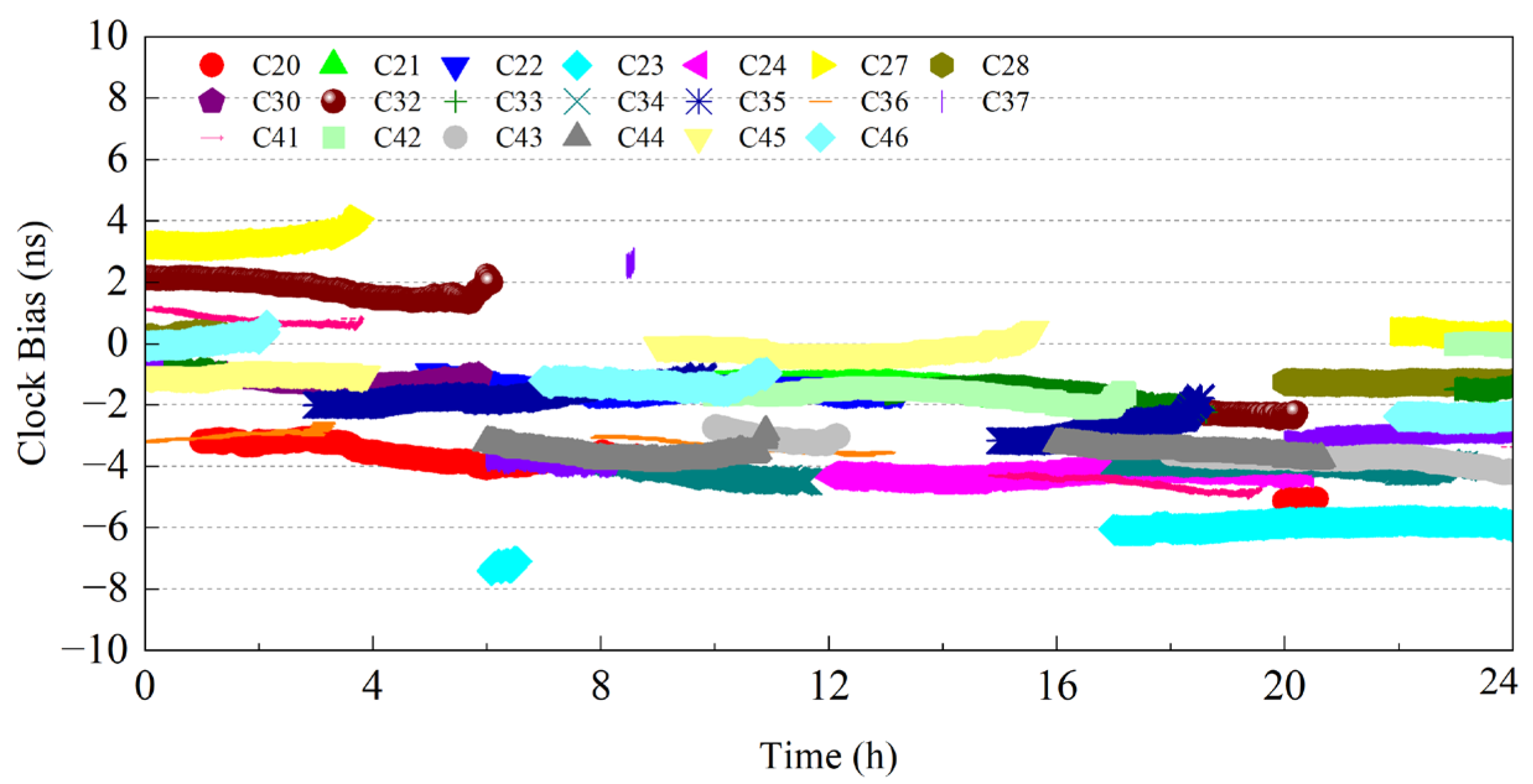
In the formula, denotes the current epoch time. When the absolute value of exceeds 0.1 ns, the double-differenced clock bias is compensated using Equation (7) with a compensation value of . Conversely, no smoothing is applied to the double-differenced sequence. Taking DOY 211 as an example, Figure 2 illustrates the double-differenced clock bias sequences for all observed satellites. The analysis reveals systematic biases in satellite clock biases, which vary across different satellites and even exhibit segment-dependent variations within the same satellite. For instance, satellite C41 exhibits a mean bias of +0.79 ns in the first half of the day and −4.56 ns in the second half, with a discrepancy of approximately 5.3 ns. In satellite clock bias estimation, code observations are required to establish a relative reference at the start of new orbital arcs. However, inaccuracies in this reference introduce constant offsets into the clock bias estimates, confirming the presence of arc-dependent systematic errors in PPP-B2b clock bias products.
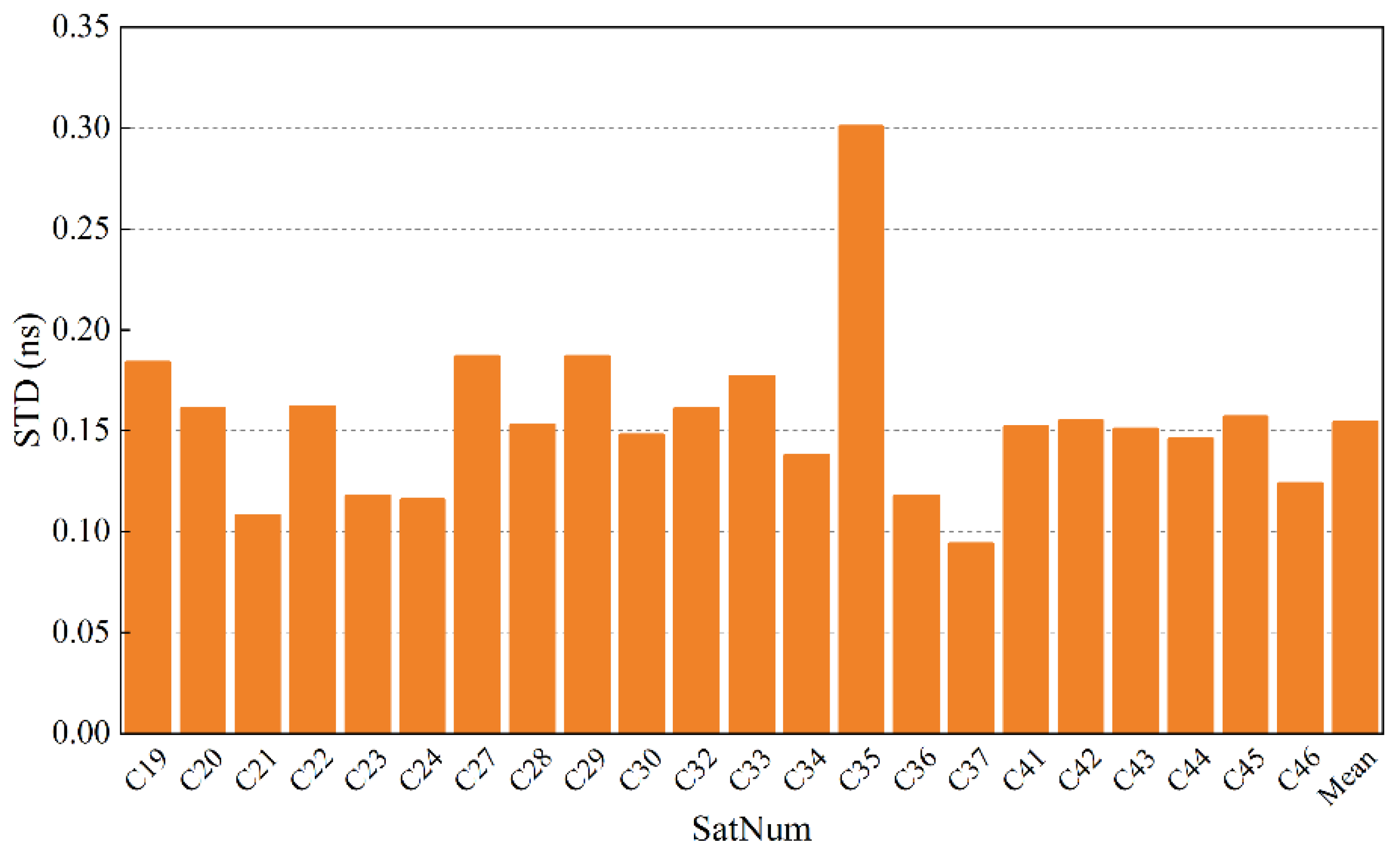
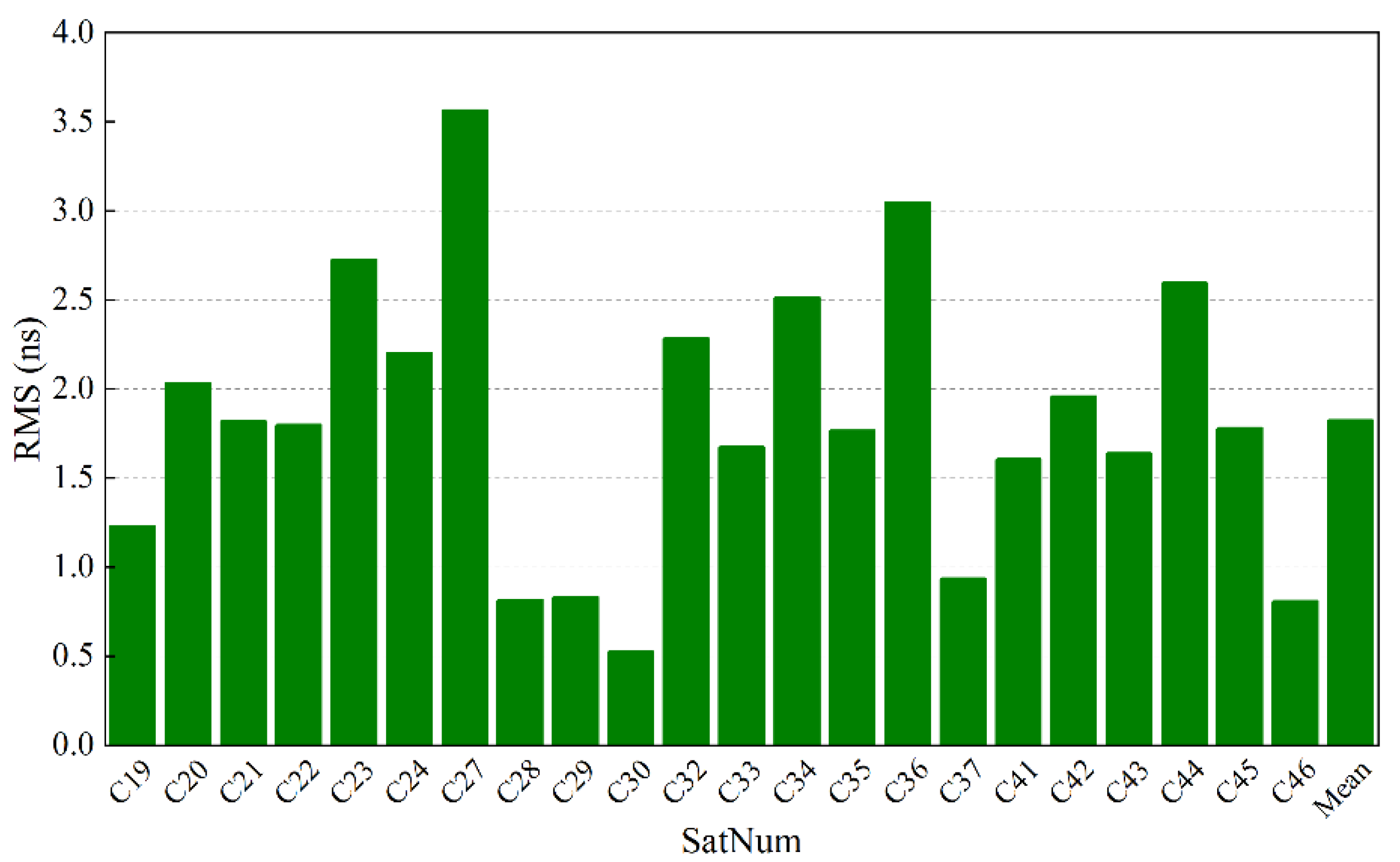
To accurately assess clock bias precision, this study employs an epoch-count-weighted statistical method to mitigate the impact of systematic biases. As illustrated in Figure 3 and Figure 4, the STD values of all satellites during DOY 211–217 are below 0.31 ns, with satellite C37 achieving the minimum STD value of less than 0.1 ns and an average STD value of approximately 0.15 ns across all satellites. However, the RMS values, which are notably more sensitive to systematic biases, demonstrate a broader distribution range. Specifically, the RMS values for the majority of satellites are within 2 ns, with the maximum RMS observed at 3.5 ns and the average RMS standing at 1.8 ns. Despite the significant inter-arc systematic biases remaining in PPP-B2b clock products, the biases are relatively stable in the continuous arc. In PPP, satellite-dependent systematic biases are absorbed by ambiguity parameters, while in code observations, these biases are retained in residuals, thereby slowing convergence. To address this, we propose a clock bias constant offset estimation method to isolate the impact of constant offsets on other parameters to be estimated, aiming to accelerate PPP convergence. The following section experimentally validates the proposed algorithm.
4.2. Comparative Analysis of Positioning Results Across Different PPP Models
This study employs a comparative experimental approach to validate the efficacy of the proposed model. The traditional PPP model is denoted as “PPP_old”, while the novel model introduced in this paper is labeled “PPP_new”. Feasibility verification was conducted using three consecutive days (DOY 213–215, 2023). Observational data spanning this period are segmented into 12 independent 2 h intervals per day, yielding a total of 288 valid solution samples for algorithm evaluation. The convergence criteria are defined as horizontal and vertical positioning errors remaining below 0.3 m and 0.6 m for five consecutive minutes, respectively. The positioning accuracy is quantified using the RMS values of post-convergence positioning errors.
The experimental results demonstrate that 98.6% of trials using the “PPP_new” model achieved convergence within 2 h, while only 1.4% failed to meet the criteria. In contrast, the “PPP_old” model yielded a convergence success rate of 89.6%, highlighting the superior convergence acceleration capability of the proposed model. Furthermore, the “PPP_new” model exhibited significantly faster convergence: 49.3%, 65.2%, and 90.6% of trials reached convergence within 20 min, 30 min, and 60 min, respectively, whereas the corresponding proportions for the “PPP_old” model were 33.7%, 44.4%, and 69.4%. Table 3 compiles the statistical results.
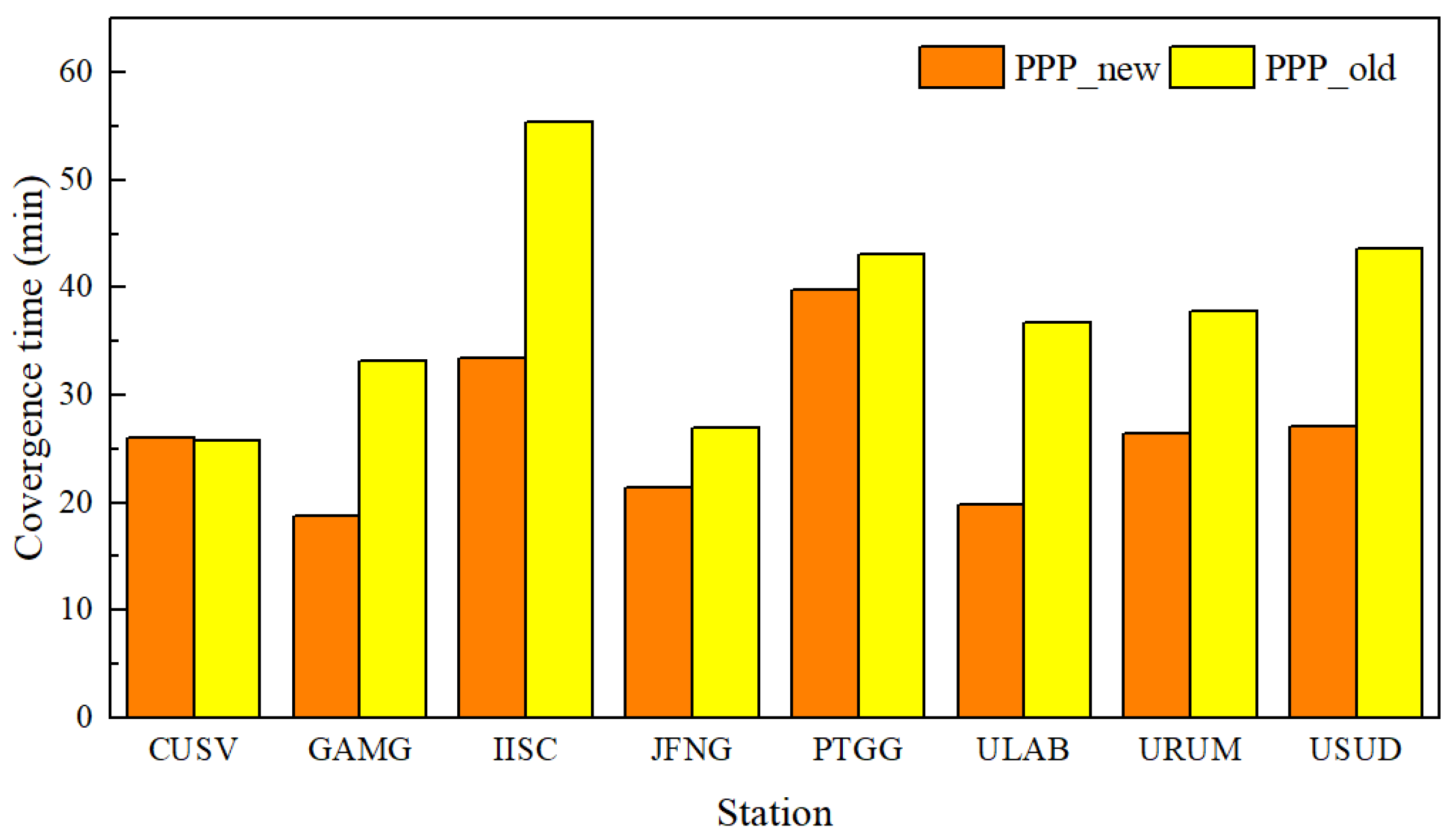
Figure 5 further presents the average convergence time for each station using both models. When employing the “PPP_new” method, the convergence times are significantly shorter than those of the “PPP_old” model across all stations except the CUSV station. The mean convergence time for the traditional model remains within 45 min, while the proposed model reduces this to within 35 min on average. Table 4 further summarizes the average RMS values and convergence time of PPP for all stations.
In light of the substantial disparity observed in the non-convergence rates between the two models, Table 4 additionally incorporates an analysis of trials in which both models successfully attained convergence, labeled as “PPP_old2” and “PPP_new2”, to facilitate objective performance evaluation. As shown in Table 4, for experiments meeting the convergence criteria under identical conditions, the traditional PPP method yielded an average convergence time of 39.0 min, whereas the new model reduced this to 25.1 min, representing a 35.6% improvement in convergence speed while maintaining equivalent post-convergence positioning accuracy. For all experiments achieving convergence, the traditional PPP method resulted in an average convergence time of 37.8 min, compared to 26.6 min with the new PPP model. However, the three-dimensional positioning accuracy post convergence decreased by 3.1% when using the new model. Further analysis suggests this discrepancy may stem from significant differences in the non-convergence rates between the two models.
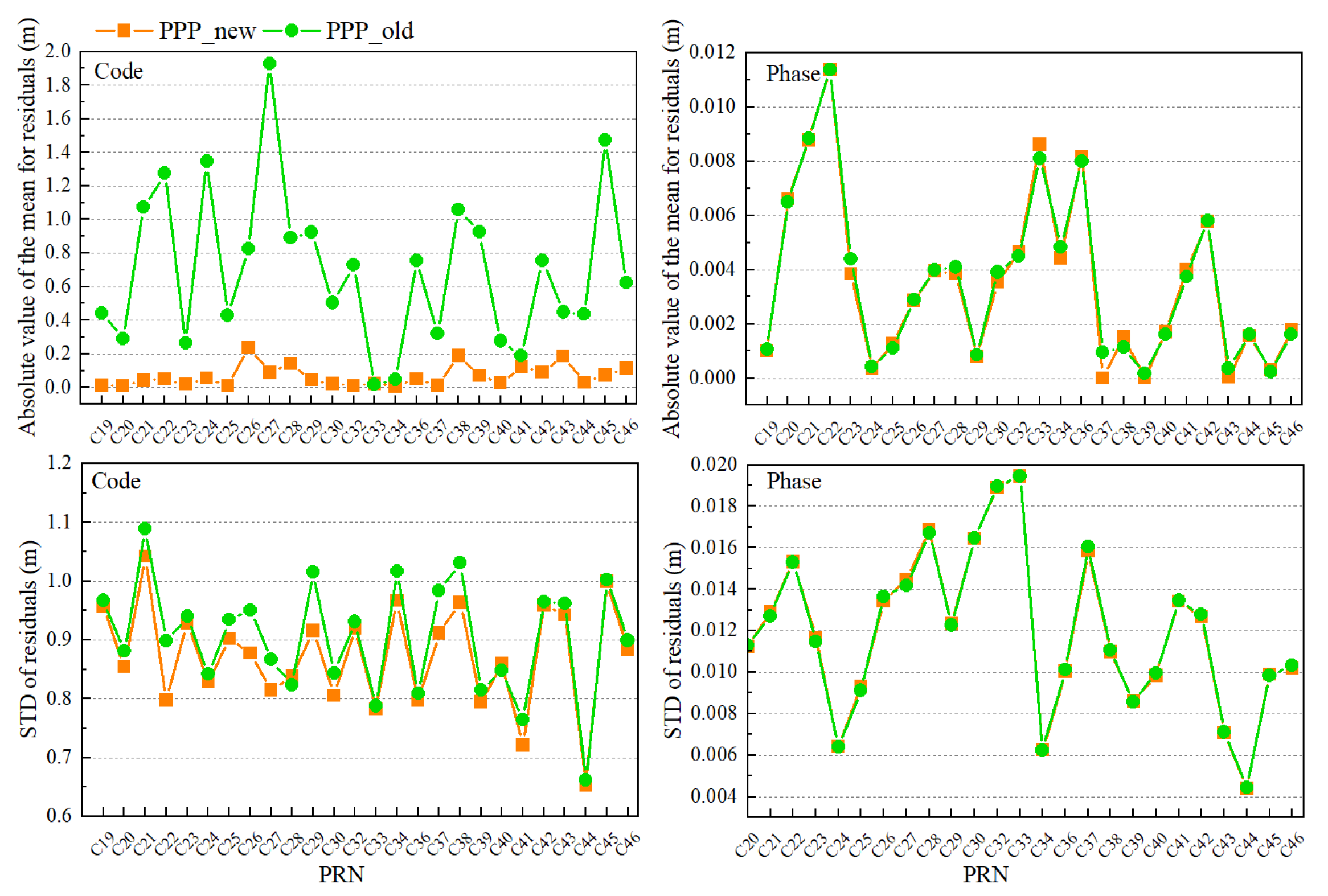
In PPP solutions, besides observational noise, non-model errors such as clock biases, orbital inaccuracies, and hardware delays are also manifested in the post-fit residuals of the observation equations. Consequently, the following analysis evaluates the new model’s efficacy in isolating non-model errors by comparing post-fit residuals. Taking the GAMG station as an example, Figure 6 illustrates the mean values and STD values of code and phase positioning residuals for single-day solutions derived from both models. For residual magnitude analysis, the mean values are presented as absolute values.
For code residuals, the traditional PPP model yields post-fit residuals concentrated around 1.4 m at the GAMG station, with a maximum reaching 1.9 m. In contrast, the new model reduces the post-fit residuals to 0.1 m, all within 0.25 m. The STD values of the code residuals remain comparable between the two models (concentrated below 1.2 m); this indicates that the new model effectively mitigates the impact of non-model errors—such as systematic biases inherent in PPP-B2b products—on code solutions, reducing residuals from meter-level to sub-decimeter accuracy. The comparable mean values and STD values of phase residuals derived from both models further substantiate that systematic biases are absorbed by ambiguity parameters [18]. Similar trends are observed across other stations; thus, detailed discussions are omitted for brevity.
4.3. Positioning Performance of BDS-3 Enhanced by LEO Satellites
To achieve global coverage, the experiment simulated a constellation of 160 LEO satellites, comprising 70 polar-orbit satellites and 90 inclined-orbit satellites. Six polar orbital planes (90° inclination) accommodated 70 satellites, whereas ten inclined planes (60° inclination) housed 90 satellites, all positioned at 1000 km altitude. The inclined-orbit satellites could provide coverage up to latitudes of 80° north and south, predominantly operating within the latitude bands of 30–60° north and south. In contrast, the polar-orbit satellites primarily served areas above 60° north and south latitude, ensuring service availability in high-latitude and polar regions. Similarly, positioning performance was analyzed using a three-day dataset (DOY 213–215, 2023). The single-day data was processed at two-hour intervals, resulting in a total of 288 solution sets. The convergence time and positioning accuracy were subjected to statistical analysis.
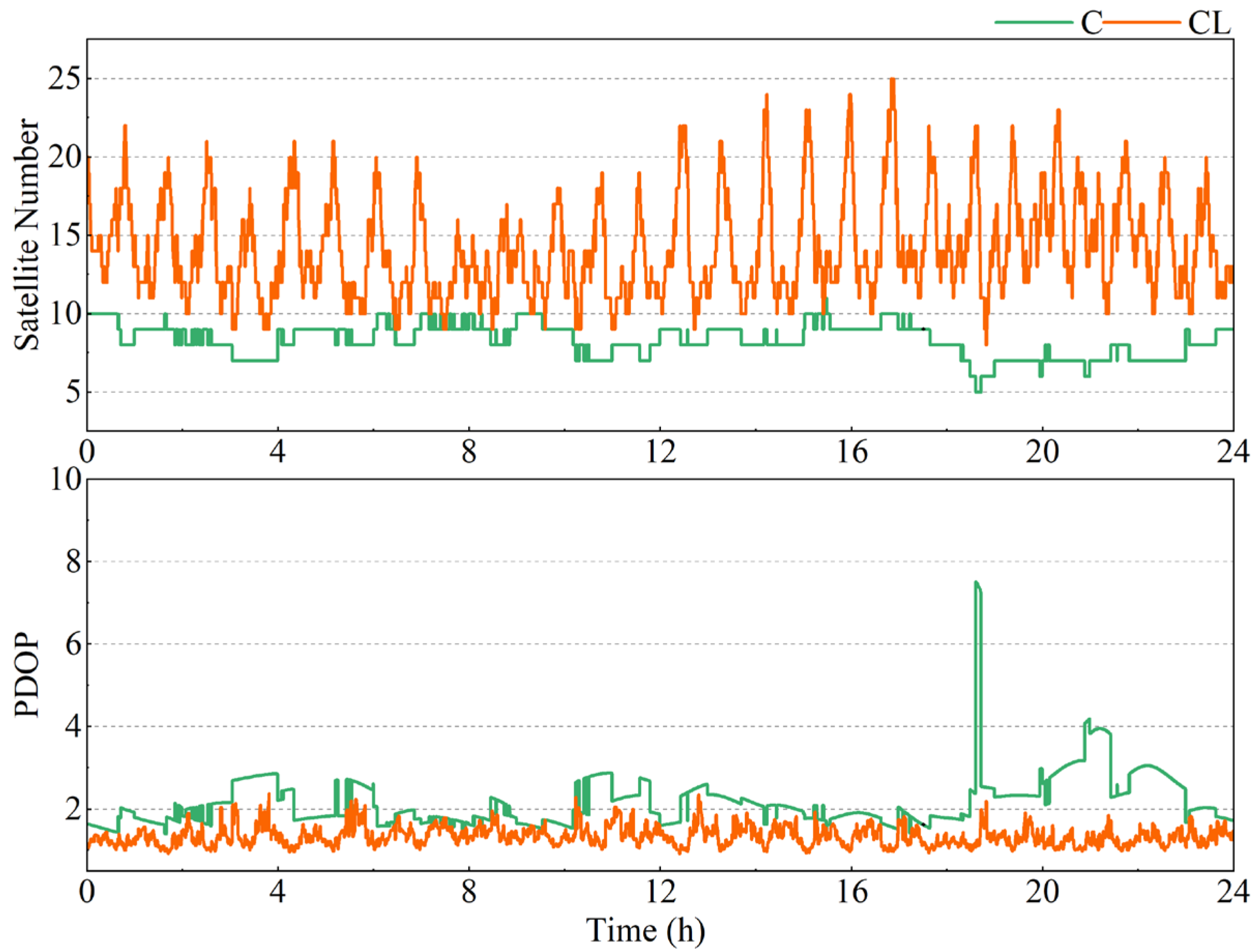
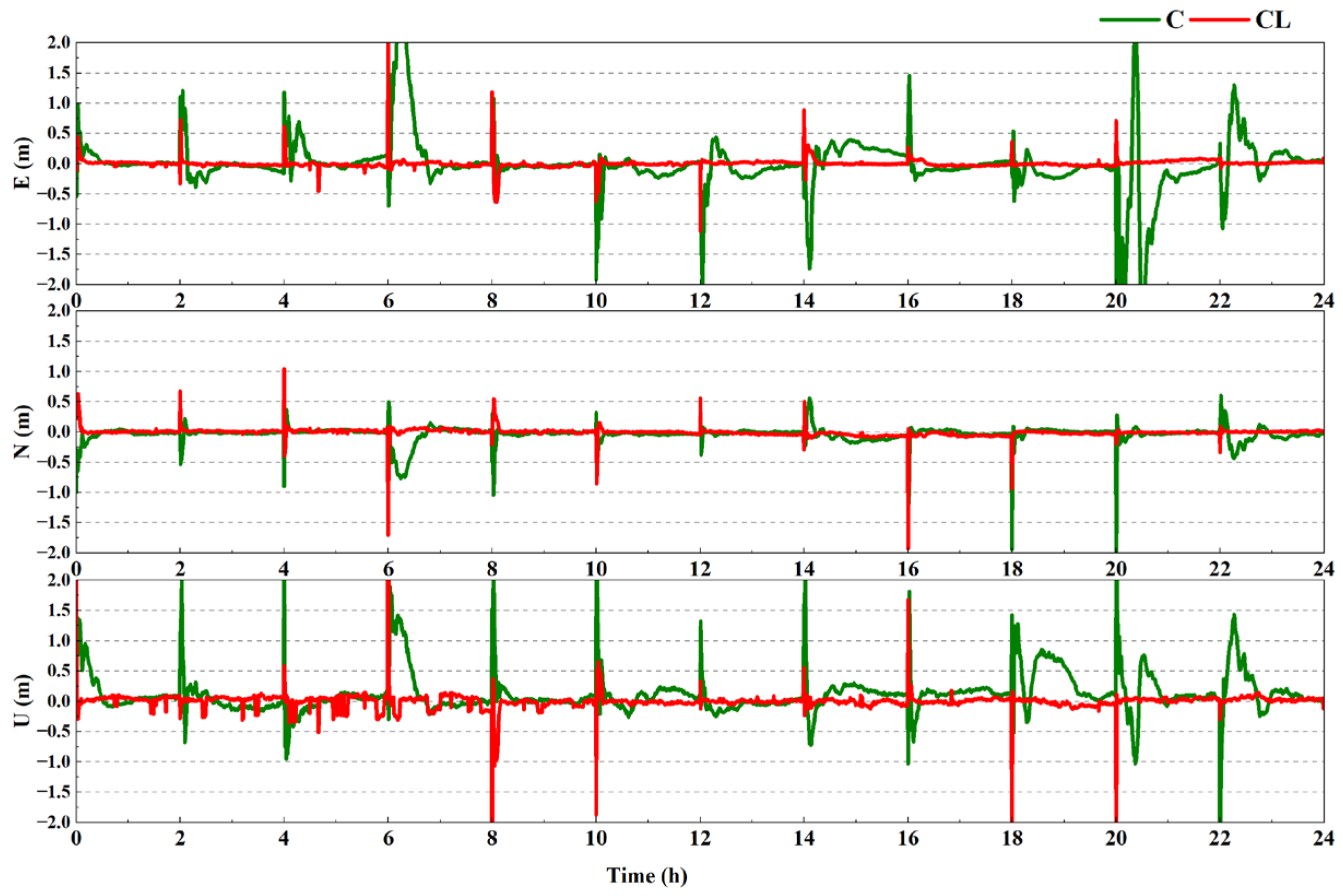
The PPP-B2b service is predominantly concentrated in China and its neighboring regions; in China, the availability of PPP-B2b corrections surpasses 80%, guaranteeing that at least seven satellites can deliver usable PPP-B2b corrections [11]. The augmentation performance provided by LEO satellites is contingent upon both the quantity and spatial distribution of the satellites. Taking the JFNG station as an illustrative case, this analysis delves into the impact of LEO satellites on the observation conditions for BDS-3 PPP with B2b service. Figure 7 presents a statistical comparison of the satellite numbers and Position Dilution of Precision (PDOP) values between the BDS-3 single-system and LEO/BDS-3 dual-system configurations. As depicted in the figure, the integration of LEO satellites led to a significant increase in the average number of visible satellites at the observation station, rising from 8 to 14. Simultaneously, the PDOP value experienced a notable decline from 2.2 to 1.3, marking a 40.9% reduction. This improvement is particularly pronounced during periods when the BDS-3 single system offers a relatively limited number of visible satellites. Furthermore, given the high orbital velocity of LEO satellites, the number of visible satellites changes rapidly over time, which leads to pronounced dynamic fluctuations in the count of observable LEO satellites at ground-based observation stations. Figure 8 showcases the PPP bias for the BDS-3 single system and the combined BDS-3/LEO system on the day. As can be seen, upon the inclusion of LEO satellites, both the convergence speed and positioning accuracy are significantly enhanced across all time intervals. A detailed analysis of these findings is elaborated upon below.
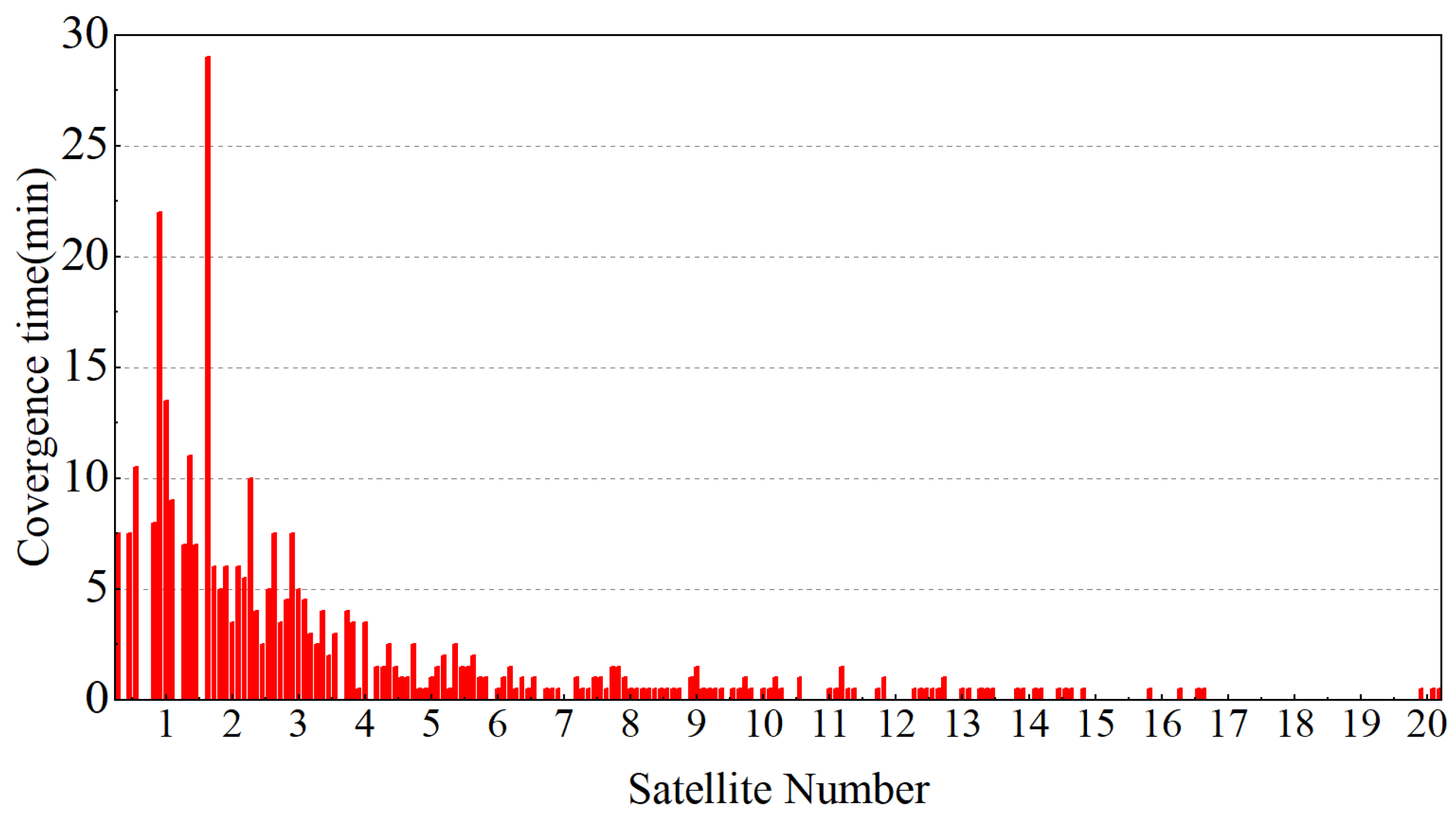
To quantitatively assess the augmentation effect of LEO satellites on the convergence time of BDS-3 PPP-B2b, this study analyzed the relationship between the convergence time in each trial and the number of visible LEO satellites (calculated as the average satellite numbers over the preceding five-minute period). As depicted in Figure 9, when the number of visible LEO satellites reaches three or more, the PPP convergence time remains consistently below five minutes, exhibiting a negative correlation with the number of LEO satellites in view. Remarkably, when the count of visible LEO satellites exceeds six, the marginal gains in the convergence time diminish significantly as the satellite number increases. Table 5 further presents the average convergence times across different ranges of LEO satellite numbers. In this particular LEO constellation design, at least two LEO satellites remain visible during 91.7% of the periods. Moreover, under the augmentation of the LEO satellites, the average convergence time for BDS-3 PPP-B2b is significantly reduced to 1.92 min, thereby validating the efficacy of LEO augmentation technology in overcoming the traditional bottleneck of PPP convergence speed.
An analysis of the impact of the LEO satellite quantity on the convergence speed demonstrates that, when two or more LEO satellites are in view, the average convergence time stabilizes at 1.34 min. As the count of visible LEO satellites rises, the convergence time exhibits a progressive decline. Specifically, when three or more LEO satellites are in view, the average convergence time is reduced to under one minute. Furthermore, as the number of available LEO satellites rises from two to eight, the proportion of observation periods with effective coverage decreases from 91.7% to 29.9%. However, the convergence time undergoes a substantial decline from 1.34 min to 0.55 min, marking a 59.0% improvement in the convergence speed. This clearly demonstrates the significant enhancing effect of LEO satellite quantity on reducing the convergence time.
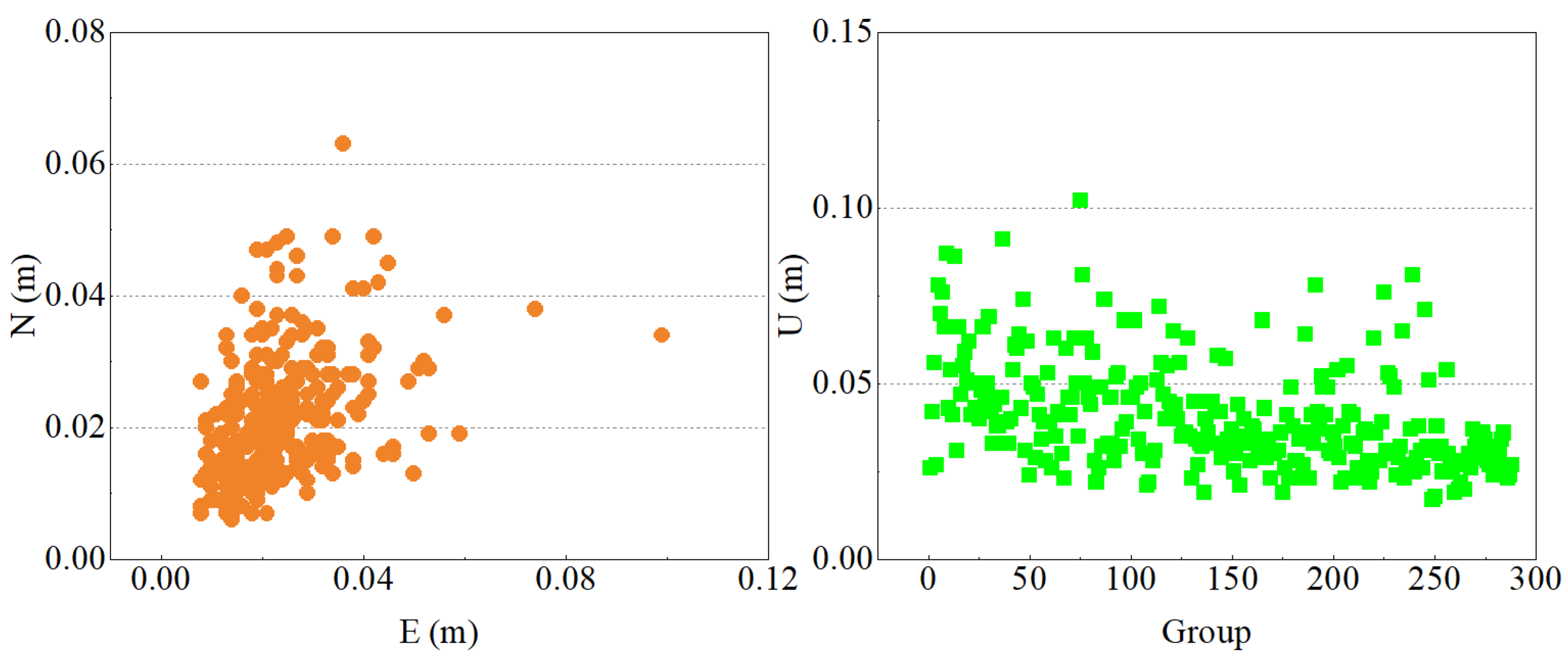
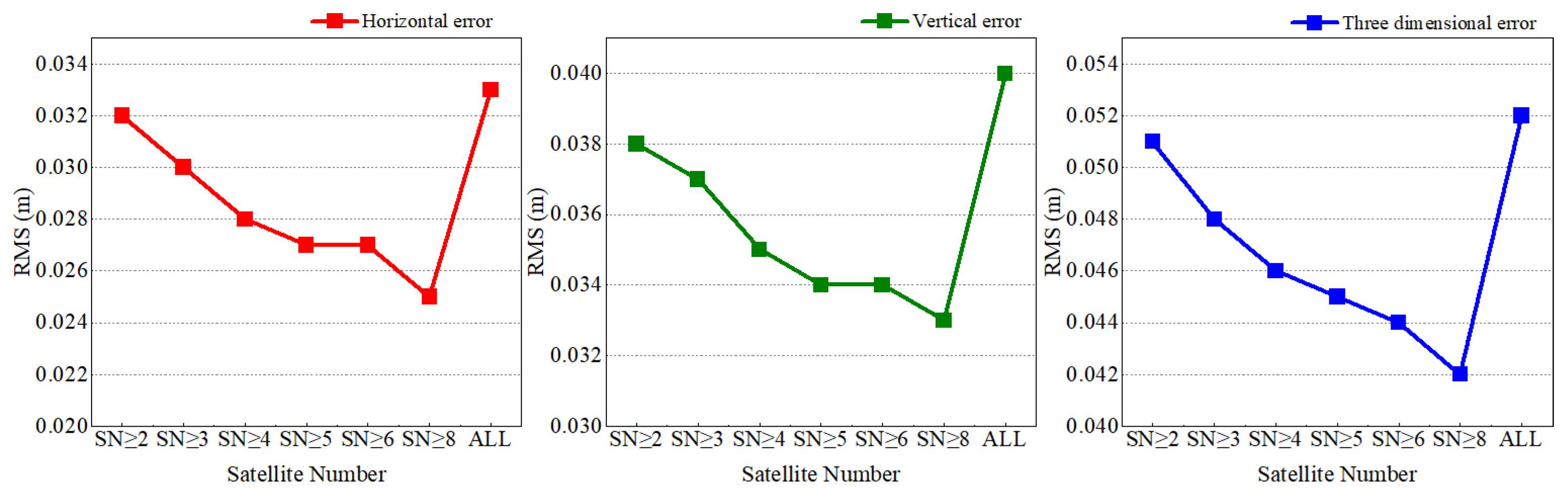
Figure 10 illustrates the positioning accuracy of the BDS-3/LEO dual-system PPP. Throughout all observation periods, the positioning accuracy in the E and N directions is concentrated within 6 cm, while in the U direction, it is concentrated within 10 cm. Figure 11 further presents a statistical analysis of the relationship between the positioning accuracy of LEO-enhanced BDS-3 PPP and the number of LEO satellites. When the count of visible LEO satellites reaches two or more, the horizontal and vertical RMS positioning errors are 3.2 cm and 3.9 cm, respectively, yielding a three-dimensional positional RMS of 5.1 cm. As the satellite count increases to four or more, the horizontal and vertical RMS errors improve to 2.8 cm and 3.5 cm, respectively, with the three-dimensional positional RMS decreasing to 4.6 cm. These results demonstrate a substantial improvement in positioning accuracy compared to the BDS-3. The mean RMS values for horizontal, vertical, and three-dimensional positioning errors across all observation periods are 3.3 cm, 4.0 cm, and 5.3 cm, respectively. Notably, when the count of visible LEO satellites reaches four or more, the positioning accuracy exhibits negligible sensitivity to further increases in satellite numbers.
5. Discussion
This study investigates the characteristics of PPP-B2b clock bias products and proposes a method to accelerate the convergence speed of BDS-3 PPP by introducing additional parameters into the code observation equation. Furthermore, the enhancement effect of LEO constellations on BDS-3 PPP-B2b performance is evaluated using simulated LEO data. On the one hand, this research provides a new approach to expediting the PPP convergence of the PPP-B2b service; on the other hand, it comprehensively assesses the PPP performance of the BDS-3 with PPP-B2b service enhanced by LEO constellations, offering valuable insights for the engineering applications of high-precision real-time positioning with the BDS. In the PPP model, considering the strength of the observation equation model, the bias estimation of the B2b service is only introduced in the code observation equation. Due to the limitations of clock bias product accuracy, ambiguity parameters in the carrier phase observation equation may absorb residual clock bias errors, compromising the stability of the ambiguity parameters. This is a key area for future focus. Additionally, this study employs simulated LEO data, which differs from real in-orbit data in terms of system bias handling and ephemeris accuracy. Future work will further optimize the functional model based on actual LEO constellation data.
6. Conclusions
The PPP-B2b service of the BDS-3 achieves dynamic decimeter-level positioning accuracy across the Asia–Pacific region by broadcasting real-time corrections via satellites. However, the PPP convergence time remains insufficient to satisfy real-time demands. To mitigate the limitations, this study introduces an LEO constellation augmentation strategy. Leveraging the LEO satellites’ low orbital altitude and high operational velocity, which enable rapid geometric configuration updates, this approach aims to enhance the real-time positioning performance of the PPP-B2b service. The analysis employs PPP-B2b service products collected from DOY 211 to 217, 2023. Initially, clock bias products were validated against the WUM ultra-rapid precise clock products as a reference standard. Subsequently, a BDS-3 PPP model was developed, incorporating a constant clock bias offset correction to account for systematic errors in the satellite clock estimate. Building upon this, an LEO-enhanced BDS-3 PPP-B2b model was further developed to enhance the positioning performance. Finally, the positioning performance of the LEO-enhanced PPP-B2b service was assessed using LEO simulation datasets. The primary conclusions of this evaluation are summarized below:
(1)
The STD values of double-differenced clock bias sequences for BDS-3 MEO satellites remain within 0.31 ns, with satellite C37 exhibiting an exceptionally low STD of less than 0.1 ns. The mean STD values, averaged across all analyzed satellites, are approximately 0.15 ns. In contrast, the RMS values of these sequences demonstrate a broader distribution, ranging up to 3.5 ns with an average RMS of approximately 1.8 ns. This discrepancy suggests that while the PPP-B2b service-derived clock bias products exhibit persistent systematic biases, these biases exhibit relative stability within contiguous observation arcs.
(2)
The newly proposed PPP model significantly accelerates the convergence speed of PPP solutions. In observation periods where both models reached convergence, the traditional PPP model exhibited an average convergence time of 39.0 min, while the proposed model reduced this to 25.1 min—yielding a 35.6% improvement in convergence efficiency without compromising post-convergence positioning accuracy.
(3)
The integration of LEO constellations significantly enhances the performance of the PPP-B2b service. With regard to geometric configuration, the average number of visible satellites at the JFNG station increases from 8 to 14, with the PDOP value reduced by 40.9% to 1.3, markedly improving observational conditions for the standalone BDS-3. Regarding convergence performance, the overall average convergence time is reduced to 1.92 min, and convergence can be achieved within 1 min when at least three LEO satellites are available. For positioning accuracy, when tracking at least two LEO satellites, the RMS values in the horizontal and vertical components are 3.2 cm and 3.9 cm, respectively, with a three-dimensional positional RMS of 5.1 cm. When four or more LEO satellites are tracked, these values improve to 2.8 cm (horizontal) and 3.5 cm (vertical), with a three-dimensional positional RMS of 4.6 cm. These results demonstrate substantial accuracy enhancements compared to standalone BDS-3 positioning.
LEO signal augmentation exhibits significant potential in GNSS high-precision real-time positioning. With the progressive deployment and operational scaling of global LEO constellations, the PPP-B2b service is poised for broader adoption in real-time-critical applications such as autonomous driving and precision agriculture. Future research will focus on optimizing the mathematical model for LEO-augmented BDS-3 PPP-B2b services using empirical LEO observation data, with the objective of further enhancing PPP-B2b performance.
Author Contributions
J.H. provided the initial conceptualization and wrote this manuscript. J.H., R.T. and Y.L. contributed to the formal analysis of results. Y.G. and F.L. contributed to the collection and analysis of resources. Y.L. polished this paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (42404043, 42274019), the Natural Science Foundation of Shandong Province (ZR2024QD111, ZR2024JQ024), and the National Key Research and Development Plan of China (2025YFE0104000).
Data Availability Statement
The raw/processed data required to reproduce these findings cannot be shared at this time as the data also forms part of an ongoing study.
Acknowledgments
The authors acknowledge the Analysis Center of Wuhan University for providing the precise product data.
Conflicts of Interest
The authors declare no conflicts of interest.
References
Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res.1997, 102, 5005–5017. [Google Scholar] [CrossRef]
Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod.2015, 89, 607–635. [Google Scholar] [CrossRef]
Lv, D.; Zeng, F.; Fang-Ling, Z.; Ouyang, X. Time transfer algorithm using multi-GNSS PPP with ambiguity resolution. Chin. Astron. Astrophys.2020, 44, 371–382. [Google Scholar]
Zhang, X.; Andersen, O.B. Surface Ice Flow Velocity and Tide Retrieval of the Amery Ice Shelf Using Precise Point Positioning. J. Geod.2006, 80, 171–176. [Google Scholar] [CrossRef]
Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive Assessment of Real-Time Precise Products from IGS Analysis Centers. Satell. Navig.2022, 3, 12. [Google Scholar] [CrossRef]
Kan, H.; Hu, Z.; Chen, G.; Liu, X.; Liu, C.; Zhao, Q. Performance Comparison of Orbit and Clock Augmentation Corrections from PPP-B2b, HAS and CLAS. Adv. Space Res.2024, 74, 668–681. [Google Scholar] [CrossRef]
Jokinen, A.; Ellum, C.; Neumann, J.; Chan, D.; Morley, T. Kinematic Performance of NovAtel CORRECT with Terrastar-D Precise Point Positioning (PPP) Service. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2014), Tampa, FL, USA, 8−12 September 2014. [Google Scholar]
Dai, L.; Chen, Y.; Lie, A.; Zeitzew, M.; Zhang, Y. StarFire SF3: Worldwide Centimeter-Accurate Real Time GNSS Positioning. In Proceedings of the ION GNSS 2016, Portland, OR, USA, 12−16 September 2016; Institute of Navigation: Portland, OR, USA, 2016; pp. 3295–3320. [Google Scholar]
China Satellite Navigation Office. BeiDou Navigation Satellite System Open Service Performance Standard (Version 3.0); China Satellite Navigation Office: Beijing, China, 2021.
CSNO. BeiDou Navigation Satellite System Signal in Space Interface Control Document Precise Point Positioning Service Signal PPP-B2b (Version 1.0); China Satellite Navigation Office: Beijing, China, 2020.
Xu, Y.; Yang, Y.; Li, J. Performance Evaluation of BDS-3 PPP-B2b Precise Point Positioning Service. GPS Solut.2021, 25, 142. [Google Scholar] [CrossRef]
Liu, Y.; Yang, C.; Zhang, M. Comprehensive Analyses of PPP-B2b Performance in China and Surrounding Areas. Remote Sens.2022, 14, 643. [Google Scholar] [CrossRef]
Zhou, H.; Wang, L.; Fu, W.; Han, Y.; Li, T.; Li, W.; Chen, R. Real-Time Single-Frequency Precise Point Positioning Using BDS-3 PPP-B2b Corrections. Measurement2022, 205, 112178. [Google Scholar] [CrossRef]
Zang, J.; Fan, S.; Xu, C.; Li, Z.; Fang, R.; Lou, Y. Performance Assessment of the BDS-3 PPP-B2b Service for Real-Time Earthquake Source Description: A Case Study for the 2021 Mw 7.4 Maduo Earthquake. GPS Solut.2024, 28, 13. [Google Scholar] [CrossRef]
Wu, P.; Lou, Y.; Zhang, W.; Dousa, J.; He, H.; Chai, J.; Ouyang, Y.; Zhang, Z.; Zou, X. Evaluation of Real-Time Kinematic Positioning Performance of the BDS-3 PPP Service on B2b Signal. GPS Solut.2023, 27, 192. [Google Scholar] [CrossRef]
Lv, Y.; Geng, T.; Zhao, Q.; Xie, X.; Zhou, R. Initial Assessment of BDS-3 Preliminary System Signal-in-Space Range Error. GPS Solut.2019, 24, 16. [Google Scholar] [CrossRef]
Tang, J.; Lyu, D.; Zeng, F.; Ge, Y.; Zhang, R. Modelling and Assessment of BDS-3 Real-Time Precise Point Positioning Time Transfer Based on PPP-B2b Service. Math. Probl. Eng.2022, 2022, 1–16. [Google Scholar] [CrossRef]
Tao, J.; Liu, J.; Hu, Z.; Zhao, Q.; Chen, G.; Ju, B. Initial Assessment of the BDS-3 PPP-B2b RTS Compared with the CNES RTS. GPS Solut.2021, 25, 131. [Google Scholar] [CrossRef]
Xu, X.; Nie, Z.; Wang, Z.; Zhang, Y.; Dong, L. An Improved BDS-3 PPP-B2b Positioning Approach by Estimating Signal in Space Range Errors. GPS Solut.2023, 27, 110. [Google Scholar] [CrossRef]
Joerger, M.; Gratton, L.; Pervan, B.; Cohen, C.E. Analysis of Iridium-Augmented GPS for Floating Carrier Phase Positioning. Navigation2010, 57, 137–160. [Google Scholar] [CrossRef]
Landry, R.J.; Nguyen, A.Q.; Rasaee, H.; Amrhar, A.; Fang, X.; Benzerrouk, H. Iridium Next LEO Satellites as an Alternative PNT in GNSS Denied Environments—Part 1. Inside GNSS2019, 14, 56–65. [Google Scholar]
Yang, Y.; Mao, Y.; Sun, B. Basic Performance and Future Developments of BeiDou Global Navigation Satellite System. Satell. Navig.2020, 1, 8. [Google Scholar] [CrossRef]
Li, M.; Xu, T.; Guan, M.; Gao, F.; Jiang, N. LEO-Constellation-Augmented Multi-GNSS Real-Time PPP for Rapid Re-Convergence in Harsh Environments. GPS Solut.2022, 26, 1–12. [Google Scholar] [CrossRef]
Li, X.; Ma, F.; Li, X.; Lv, H.; Bian, L.; Jiang, Z.; Zhang, X. LEO constellation-augmented multi-GNSS for rapid PPP convergence. J. Geod.2019, 93, 749–764. [Google Scholar] [CrossRef]
Ge, H.; Li, B.; Ge, M.; Zang, N.; Nie, L.; Shen, Y.; Schuh, H. Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS). Remote Sens.2018, 10, 984. [Google Scholar] [CrossRef]
Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS Carrier-Phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations. J. Geod.2008, 82, 389–399. [Google Scholar] [CrossRef]
Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of Antenna Orientation on GPS Carrier Phase. In Proceedings of the AAS/AIAA Astrodynamics Conference, Durango, CO, USA, 19−22 August 1992; pp. 1647–1660. [Google Scholar]
Petit, G.; Luzum, B. IERS Conventions 2010; Bureau International des Poids et Mesures: Sevres, France, 2010. [Google Scholar]
Figure 1.
Distribution of stations.
Figure 1.
Distribution of stations.
Figure 2.
Double-differenced clock bias sequences for BDS-3 satellites on DOY 211, 2023.
Figure 2.
Double-differenced clock bias sequences for BDS-3 satellites on DOY 211, 2023.
Figure 3.
The STD of double-differenced clock bias for BDS-3 satellites during DOY 211–217, 2023.
Figure 3.
The STD of double-differenced clock bias for BDS-3 satellites during DOY 211–217, 2023.
Figure 4.
The RMS of double-differenced clock bias for BDS-3 satellites during DOY 211–217, 2023.
Figure 4.
The RMS of double-differenced clock bias for BDS-3 satellites during DOY 211–217, 2023.
Figure 5.
Average convergence time for two PPP model solutions.
Figure 5.
Average convergence time for two PPP model solutions.
Figure 6.
Post-fit residuals for two PPP models at the GAMG station.
Figure 6.
Post-fit residuals for two PPP models at the GAMG station.
Figure 7.
Satellite number and PDOP values for the BDS-3 single-system and LEO/BDS-3 dual-system configurations at the JFNG station.
Figure 7.
Satellite number and PDOP values for the BDS-3 single-system and LEO/BDS-3 dual-system configurations at the JFNG station.
Figure 8.
Positioning bias of the BDS-3 single-system and LEO/BDS-3 dual-system configurations at the JFNG station.
Figure 8.
Positioning bias of the BDS-3 single-system and LEO/BDS-3 dual-system configurations at the JFNG station.
Figure 9.
Relationship between the LEO satellite number and convergence time for the BDS-3/LEO dual-system configuration.
Figure 9.
Relationship between the LEO satellite number and convergence time for the BDS-3/LEO dual-system configuration.
Figure 10.
RMS values of positioning bias of the BDS-3/LEO dual-system configuration.
Figure 10.
RMS values of positioning bias of the BDS-3/LEO dual-system configuration.
Figure 11.
Relationship between the positioning accuracy and convergence time for the BDS-3/LEO dual-system configuration. The horizontal axis “SN” in the figure represents the satellite number.
Figure 11.
Relationship between the positioning accuracy and convergence time for the BDS-3/LEO dual-system configuration. The horizontal axis “SN” in the figure represents the satellite number.
Table 1.
PPP processing strategy.
Table 1.
PPP processing strategy.
Parameters
Processing Settings
Frequency selection
BDS-3: B1I/B3I; LEO: L1/L2
Observations
Ionospheric-free combination observations of phase and code
Sample interval
30 s
Cut-off elevation angle
7°
Satellite ephemeris/clock
BDS-3: PPP-B2b products; LEO: simulated products
Station coordinates
Estimated as constants in dynamic mode
Estimated as piece-wise constant
Troposphere dry correction
Corrected by Saastamoinen model with NMF mapping function
Table 3.
Proportion of convergence times for the two models.
Table 3.
Proportion of convergence times for the two models.
PPP Model/Convergence Time
≤20 min
≤30 min
≤60 min
Failure
PPP_old
33.7%
44.4%
69.4%
10.4%
PPP_new
49.3%
65.2%
90.6%
1.4%
Table 4.
Average RMS values and convergence time using two models.
Table 4.
Average RMS values and convergence time using two models.
PPP Model/RMS
Horizontal
Vertical
Three-Dimensional
Mean Convergence Time
PPP_old
0.137
0.178
0.224 m
37.8 min
PPP_new
0.151
0.175
0.231 m
26.6 min
PPP_old2
0.146
0.173
0.227 m
39.0 min
PPP_new2
0.137
0.180
0.227 m
25.1 min
Table 5.
Average convergence time for PPP using the BDS-3/LEO dual system.
Table 5.
Average convergence time for PPP using the BDS-3/LEO dual system.
LEO Satellite Number
≥2
≥3
≥4
≥5
≥6
≥8
ALL
Proportion
91.7%
73.6%
60.4%
53.8%
43.4%
29.9%
100%
Convergence Time
1.34 min
0.95 min
0.72 min
0.66 min
0.61 min
0.55 min
1.92 min
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
Hong, J.; Tu, R.; Liu, Y.; Ge, Y.; Li, F.
LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sens.2025, 17, 2183.
https://doi.org/10.3390/rs17132183
AMA Style
Hong J, Tu R, Liu Y, Ge Y, Li F.
LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sensing. 2025; 17(13):2183.
https://doi.org/10.3390/rs17132183
Chicago/Turabian Style
Hong, Ju, Rui Tu, Yangyang Liu, Yulong Ge, and Fangxin Li.
2025. "LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal" Remote Sensing 17, no. 13: 2183.
https://doi.org/10.3390/rs17132183
APA Style
Hong, J., Tu, R., Liu, Y., Ge, Y., & Li, F.
(2025). LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sensing, 17(13), 2183.
https://doi.org/10.3390/rs17132183
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Hong, J.; Tu, R.; Liu, Y.; Ge, Y.; Li, F.
LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sens.2025, 17, 2183.
https://doi.org/10.3390/rs17132183
AMA Style
Hong J, Tu R, Liu Y, Ge Y, Li F.
LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sensing. 2025; 17(13):2183.
https://doi.org/10.3390/rs17132183
Chicago/Turabian Style
Hong, Ju, Rui Tu, Yangyang Liu, Yulong Ge, and Fangxin Li.
2025. "LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal" Remote Sensing 17, no. 13: 2183.
https://doi.org/10.3390/rs17132183
APA Style
Hong, J., Tu, R., Liu, Y., Ge, Y., & Li, F.
(2025). LEO-Enhanced BDS-3 PPP Performance Based on B2b Signal. Remote Sensing, 17(13), 2183.
https://doi.org/10.3390/rs17132183
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}