
SAR 3D Reconstruction Based on Multi-Prior Collaboration

 ,
, 
 ,
,  and
and
Abstract
1. Introduction
2. Array SAR Reconstruction Model Based on Regularization Functions
3. Methodology
3.1. A Typical Multi-Prior Sparse SAR Reconstruction Model
3.2. The Proposed SAR 3D Reconstruction Method
3.2.1. Module Refinement of Optimization Problems
- (1)
- Data fidelity module: Ensured that the reconstructed image remained consistent with the observed measurements , preserving data integrity.
- (2)
- Sparse prior module: Incorporated the sparsity constraint.
- (3)
- Geometric prior module: Imposed structural or geometric constraints, such as edge preservation, smoothness, or continuity, to enhance the spatial coherence of the reconstruction.
3.2.2. Collaborative Optimization Framework for Array SAR 3D Reconstruction
- (1)
- Consensus conditionswhere is the output solution and is the adjustment amount corresponding to the corresponding module.
- (2)
- Equilibrium conditionwhere is a non-negative weight and the sum of all weights is 1.
3.2.3. Design and Implementation of Modules
4. Experiment Analysis and Discussion
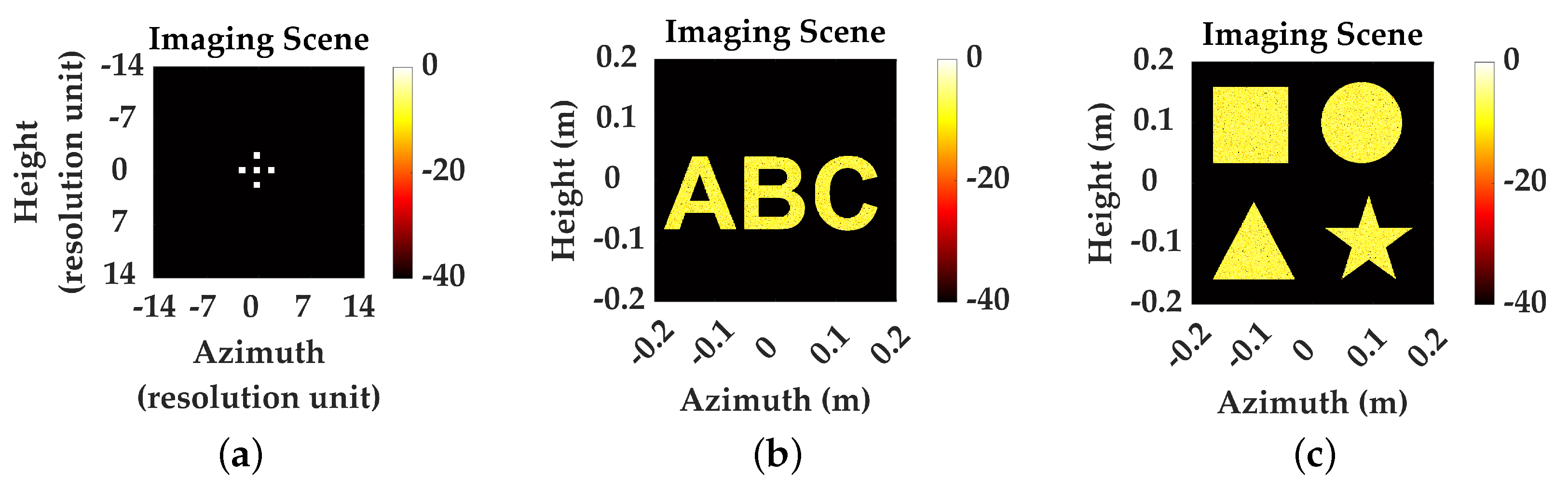
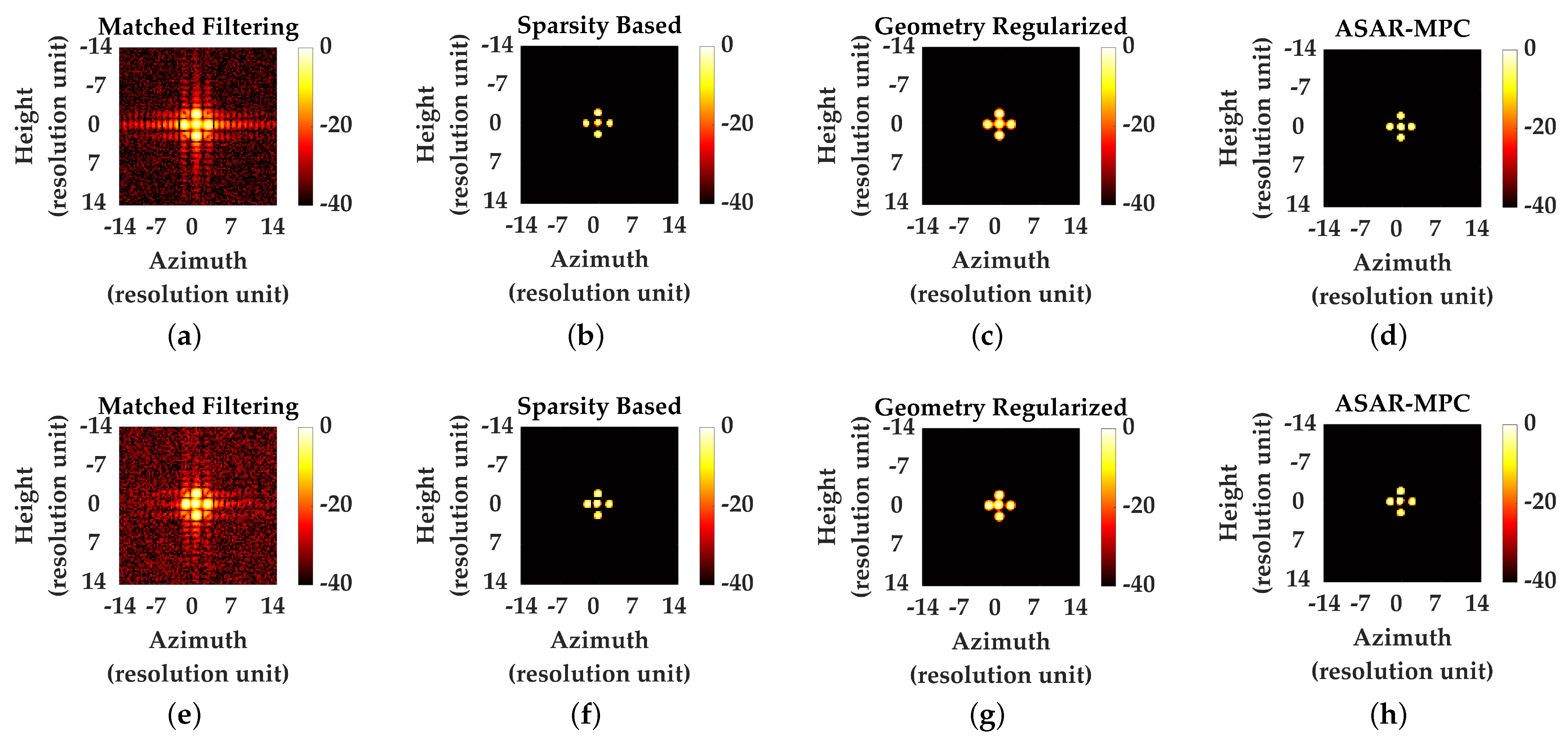
4.1. Simulation Experiment
4.1.1. Point Targets
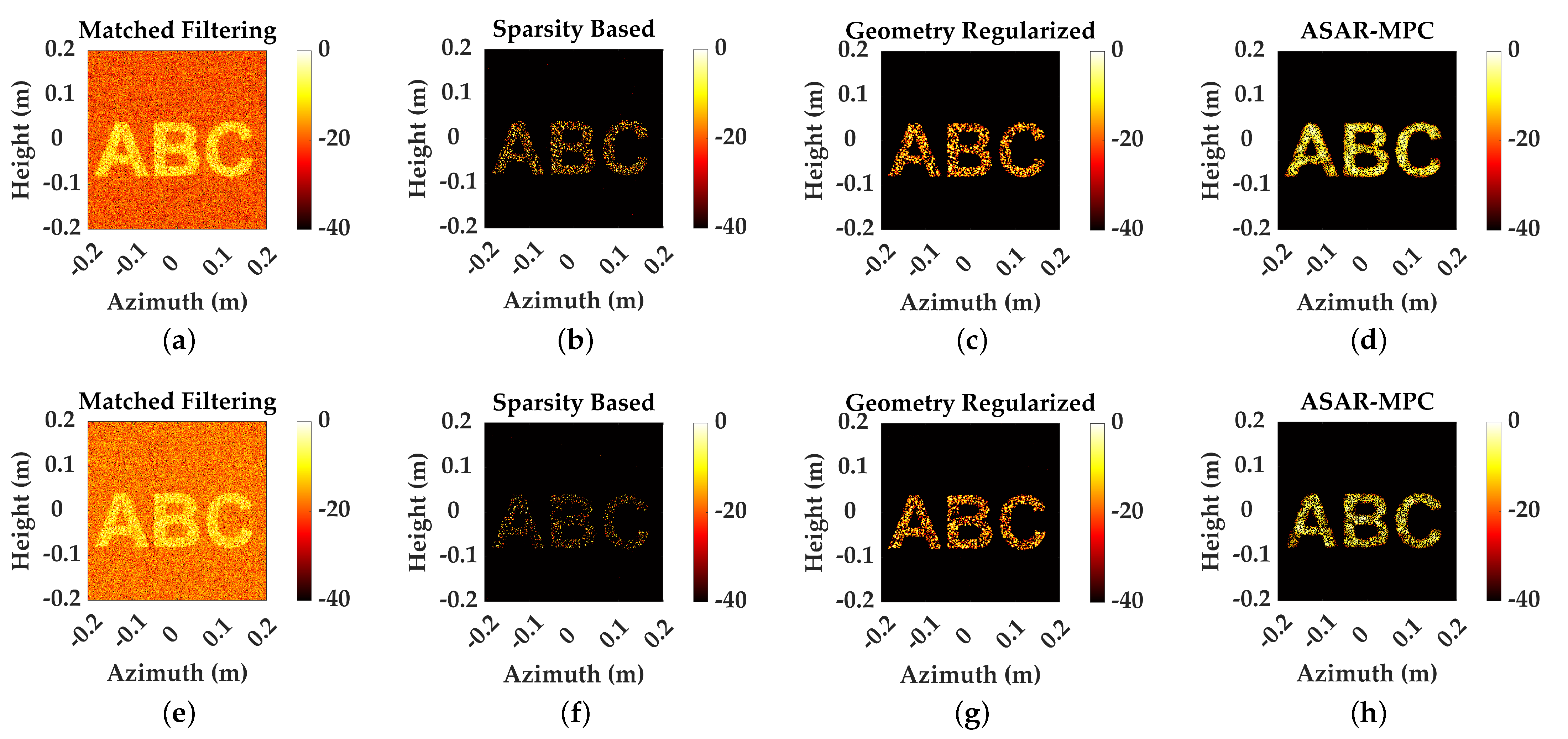
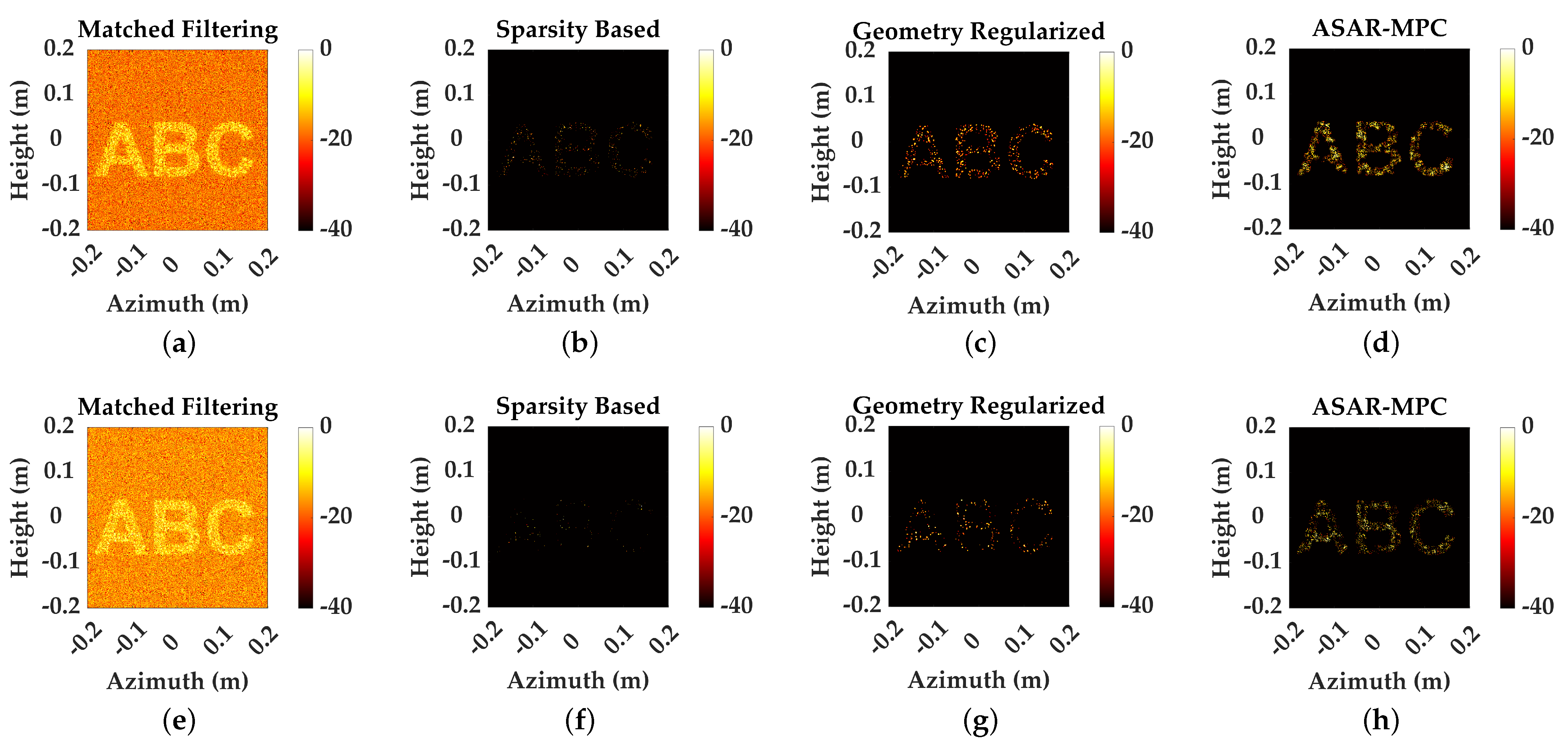
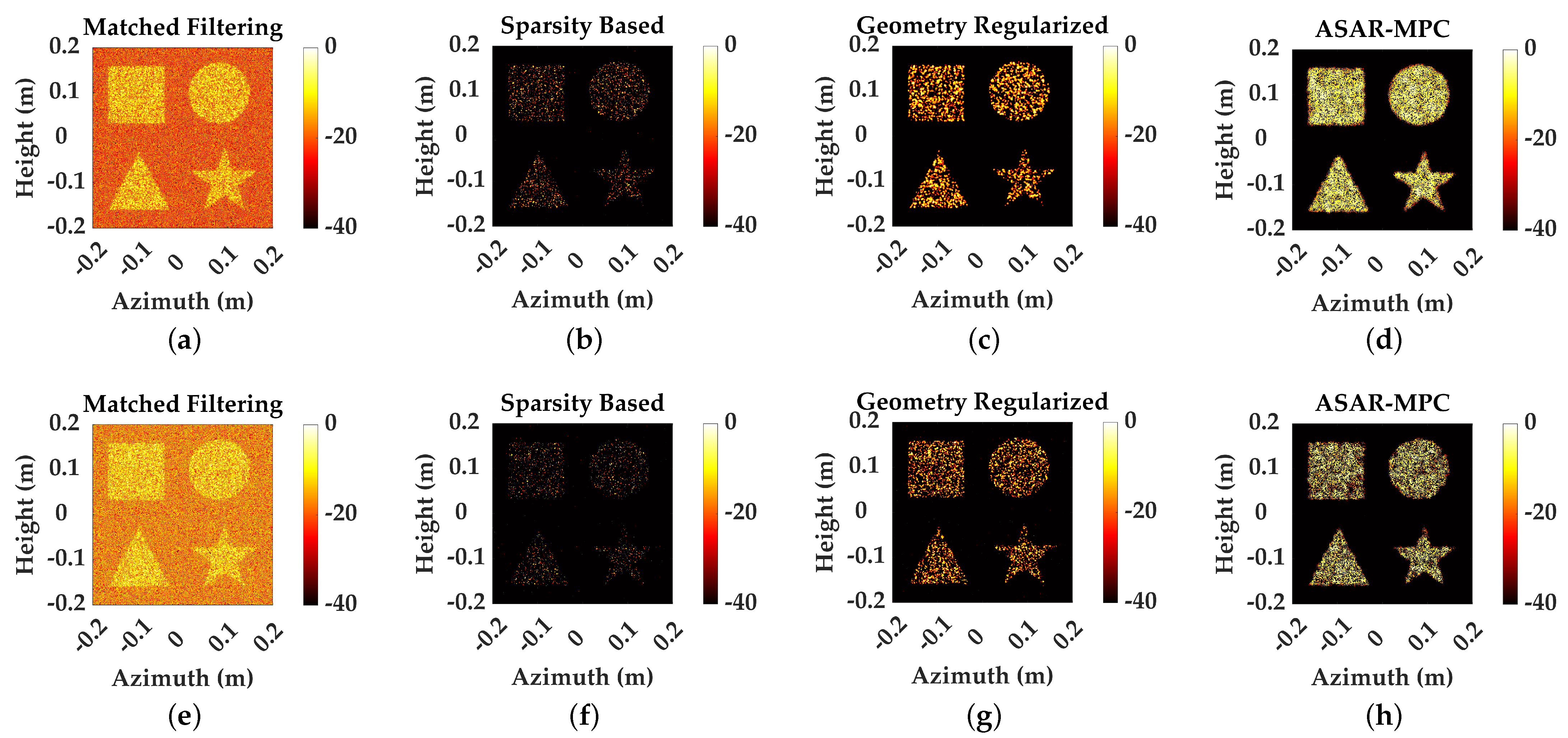
4.1.2. Alphabet Targets
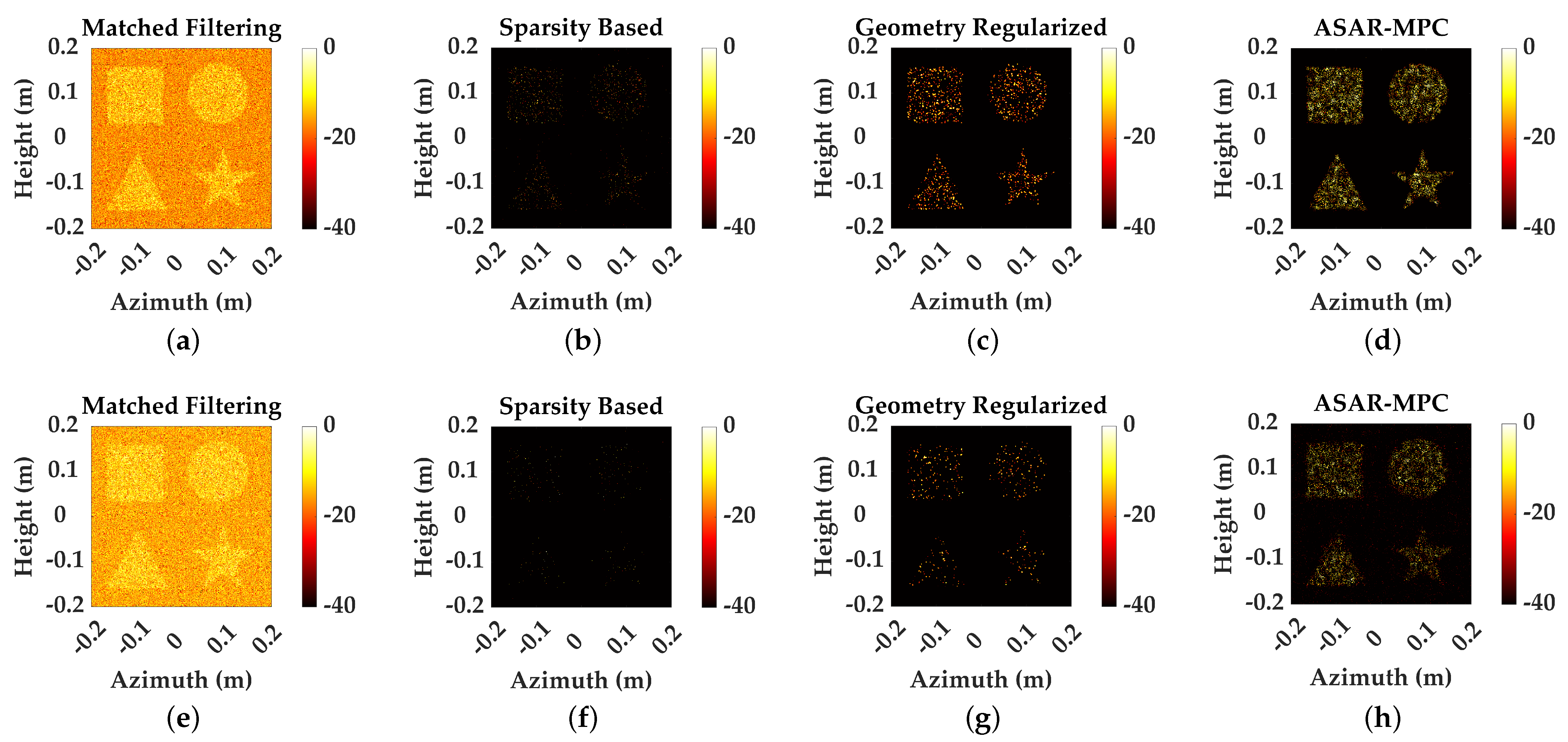
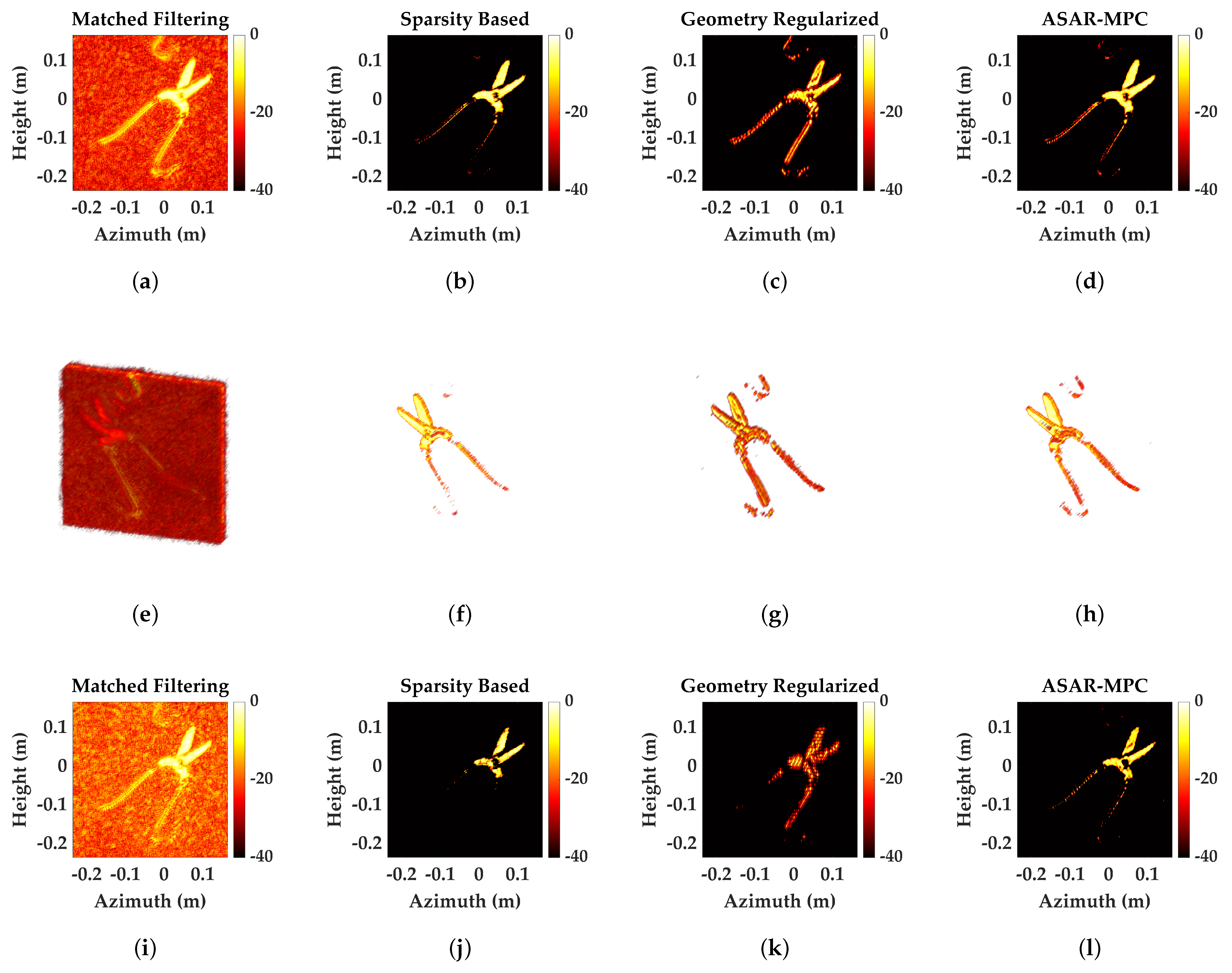
4.1.3. Complex Geometric Targets
4.2. Real Experiment with Array SAR System
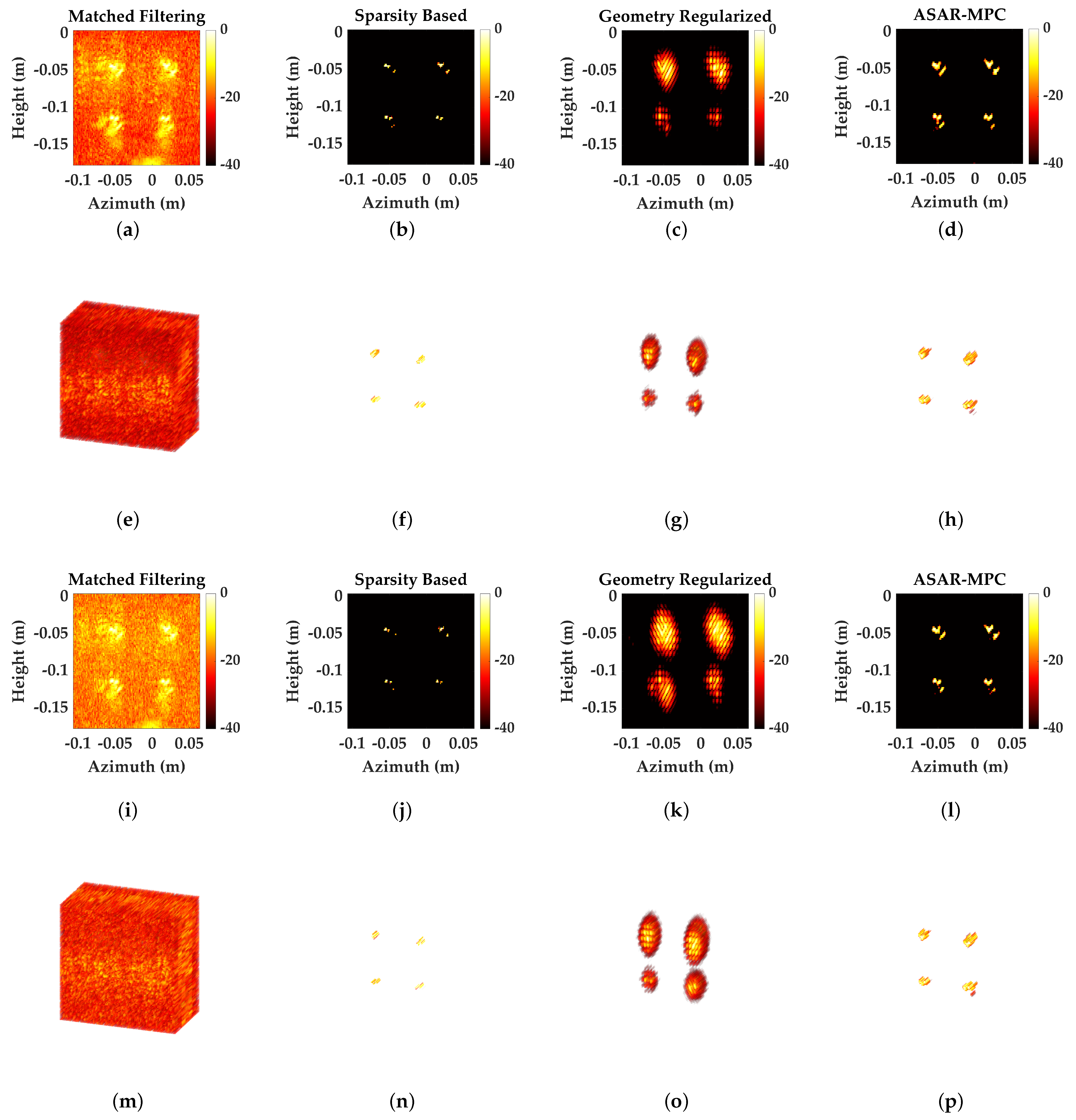
4.2.1. Point Targets
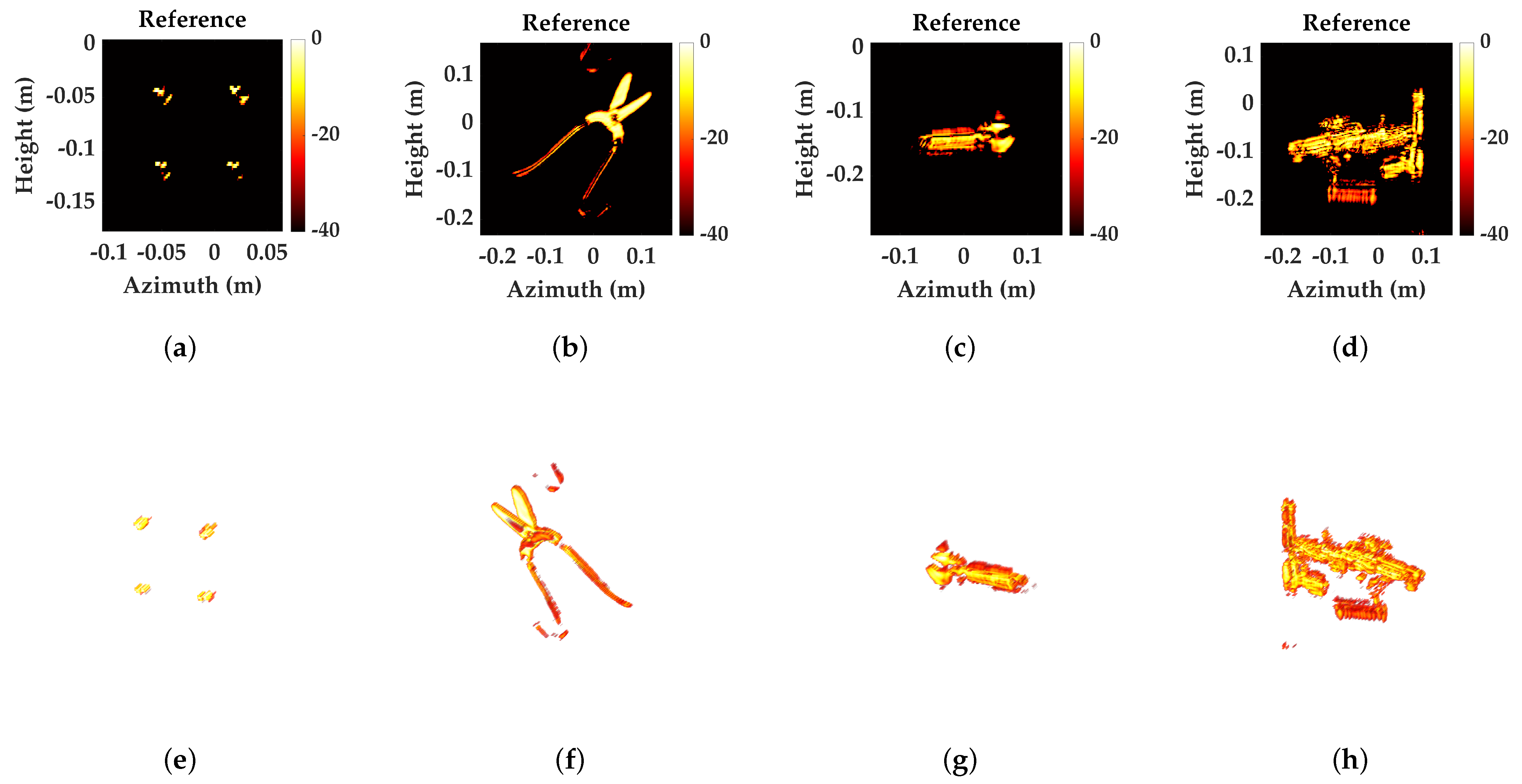
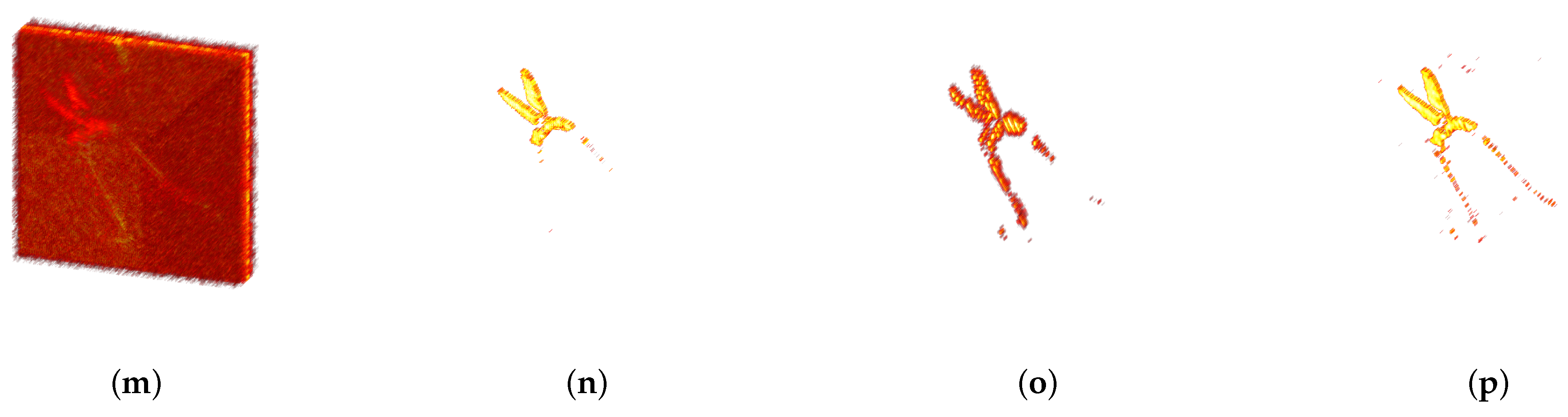
4.2.2. Single Complex Geometric Target
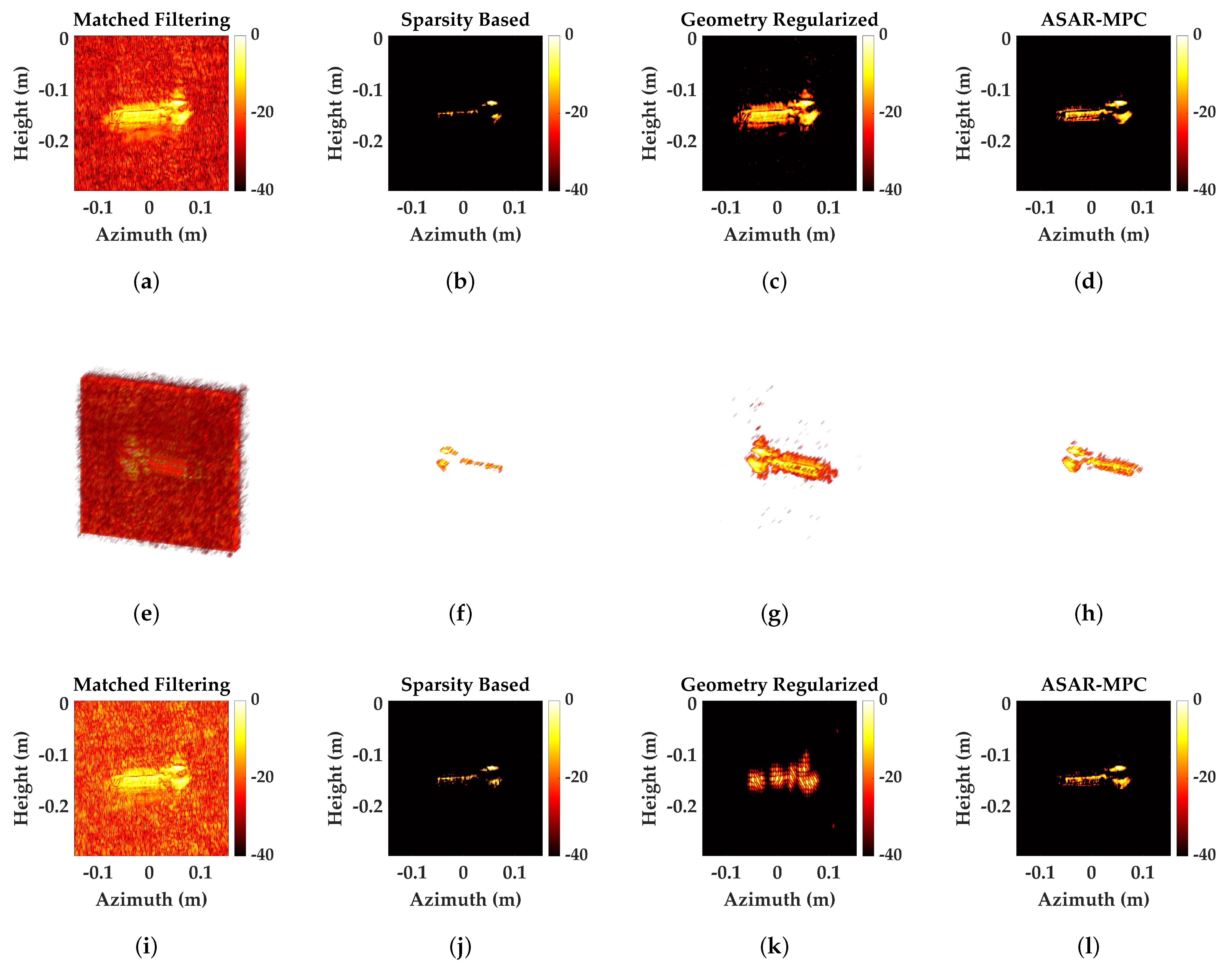
4.2.3. Multiple Complex Geometric Targets
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zeng, T.; Zhan, X.; Ren, Y.; Ma, X.; Liu, L.; Shi, J. Exploring Spatial Feature Regularization in Deep-Learning-Based TomoSAR Reconstruction: A Preliminary Study and Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2025, 63, 5201227. [Google Scholar] [CrossRef]
- Guan, S.; Wang, M.; Liang, X.; Liu, Y.; Li, Y. An Unambiguous Super-Resolution Algorithm for TDM-MIMO-SAR 3D Imaging Applications on Fast-Moving Platforms. Remote Sens. 2025, 17, 639. [Google Scholar] [CrossRef]
- Wang, Y.; Zhan, X.; Yao, J.; Zhan, Y.; Bai, J. 3D Sparse SAR Imaging Based on Complex-Valued Nonconvex Regularization for Scattering Diagnosis. IEEE Antennas Wirel. Propag. Lett. 2024, 23, 888–892. [Google Scholar] [CrossRef]
- Zeng, T.; Zhan, X.; Ma, X.; Liu, R.; Shi, J.; Wei, S. Unsupervised 3D Array-SAR Imaging Based on Generative Model for Scattering Diagnosis. IEEE Antennas Wirel. Propag. Lett. 2024, 23, 2451–2455. [Google Scholar] [CrossRef]
- Alvarez, J. Near-Field 2-D-lateral Scan System for RCS Measurement of Full-Scale Targets Located on the Ground. IEEE Trans. Antennas Propag. 2019, 67, 4049–4058. [Google Scholar] [CrossRef]
- Ren, H.; Zhou, R.; Zou, L.; Tang, H. Hierarchical Distribution-Based Exemplar Replay for Incremental SAR Automatic Target Recognition. IEEE Trans. Aerosp. Electron. Syst. 2025, 61, 6576–6588. [Google Scholar] [CrossRef]
- Li, Y.; Ren, H.; Yu, X.; Zhang, C.; Zou, L.; Zhou, Y. Threshold-Free Open-Set Learning Network for SAR Automatic Target Recognition. IEEE Sens. J. 2024, 24, 6700–6708. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Zhan, X.; Zeng, Q.; Hu, Y. A 3D Sparse SAR Imaging Method Based on Plug-and-Play. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar]
- Wang, M.; Wei, S.; Liang, J.; Liu, S.; Shi, J.; Zhang, X. Lightweight FISTA-Inspired Sparse Reconstruction Network for mmW 3D Holography. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5211620. [Google Scholar]
- Sun, Z.; Leng, X.; Zhang, X.; Zhou, Z.; Xiong, B.; Ji, K. Arbitrary-Direction SAR Ship Detection Method for Multiscale Imbalance. IEEE Trans. Geosci. Remote Sens. 2025, 63, 5208921. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, S.; Sun, Z.; Liu, C.; Sun, Y.; Ji, K. Cross-Sensor SAR Image Target Detection Based on Dynamic Feature Discrimination and Center-Aware Calibration. IEEE Trans. Geosci. Remote Sens. 2025, 63, 5209417. [Google Scholar] [CrossRef]
- Guan, T.; Chang, S.; Wang, C.; Jia, X. SAR Small Ship Detection Based on Enhanced YOLO Network. Remote Sens. 2025, 17, 839. [Google Scholar] [CrossRef]
- Karakus, O.; Mayo, P.; Achim, A. Convergence Guarantees for Nonconvex Optimisation with Cauchy-based Penalties. IEEE Trans. Signal Process. 2020, 68, 6159–6170. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Yang, F.; Zeng, Q.; Zhan, X. 3D Sparse SAR Image Reconstruction Based on Cauchy Penalty and Convex Optimization. Remote Sens. 2022, 14, 2308. [Google Scholar] [CrossRef]
- Yang, H.; Yu, J.; Li, Z.; Yu, Z. Non-Local SAR Image Despeckling Based on Sparse Representation. Remote Sens. 2023, 15, 4485. [Google Scholar] [CrossRef]
- Xu, C.; Wang, X. OpenSARWake: A Large-Scale SAR Dataset for Ship Wake Recognition with a Feature Refinement Oriented Detector. IEEE Geosci. Remote. Sens. Lett. 2024, 21, 4010105. [Google Scholar] [CrossRef]
- Xu, C.; Wang, Q.; Wang, X.; Chao, X.; Pan, B. Wake2Wake: Feature-Guided Self-Supervised Wave Suppression Method for SAR Ship Wake Detection. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5108114. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via The Alternating Direction Method of Multipliers. Found. Trends® Mach. Learn. 2011, 3, 1–122. [Google Scholar]
- Gao, J.; Wang, Y.; Yao, J.; Zhan, X.; Sun, G.; Bai, J. Three-Dimensional Array SAR Sparse Imaging Based on Hybrid Regularization. IEEE Sensors J. 2024, 24, 16699–16709. [Google Scholar] [CrossRef]
- Daubechies, I.; Defriese, M.; De Mol, C. An Iterative Thresholding Algorithm for Linear Inverse Problems with A Sparsity Constraint. Commun. Pure Appl. Math. 2004, 57, 1413–1457. [Google Scholar] [CrossRef]
- Wang, Y.; Zhan, X.; Gao, J.; Yao, J.; Wei, S.; Bai, J. Array SAR 3-D Sparse Imaging Based on Regularization by Denoising Under Few Observed Data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5213114. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Blumensath, T.; Mulgrew, B.; Davies, M. Fast encoding of synthetic aperture radar raw data using compressed sensing. In Proceedings of the 2007 IEEE/SP 14th Workshop on Statistical Signal Processing, Madison, WI, USA, 26–29 August 2007. [Google Scholar]
- Zhu, X.; Bamler, R. Super–Resolution Power and Robustness of Compressive Sensing for Spectral Estimation with Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Tan, X.; Roberts, W.; Li, J.; Stoica, P. Sparse Learning via Iterative Minimization with Application to MIMO Radar Imaging. IEEE Trans. Signal Process. 2011, 59, 1088–1101. [Google Scholar] [CrossRef]
- Zhu, X.; Bamler, R. Tomographic SAR Inversion by L1-Norm Regularization-the Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef]
- Bi, H.; Zhang, J.; Wang, P.; Bi, G. Airborne FMCW SAR Sparse Data Processing Via Frequency-Scaling Algorithm. IEEE Geosci. Remote. Sens. Lett. 2020, 18, 1224–1228. [Google Scholar] [CrossRef]
- Zhang, C.-H. Nearly Unbiased Variable Selection under Minimax Concave Penalty. Ann. Stat. 2010, 38, 894–942. [Google Scholar] [CrossRef]
- Fan, J.; Li, R. Variable Selection via Nonconcave Penalized Likelihood and Its Oracle Properties. J. Am. Stat. Assoc. 2001, 96, 1348–1360. [Google Scholar] [CrossRef]
- Zuo, W.; Meng, D.; Zhang, L.; Feng, X.; Zhang, D. A Generalized Iterated Shrinkage Algorithm for Non-convex Sparse Coding. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 217–224. [Google Scholar]
- Wang, Y.; He, Z.; Zhan, X.; Fu, Y.; Zhou, L. Three-Dimensional Sparse SAR Imaging with Generalized Lq Regularization. Remote Sens. 2022, 14, 288. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, X.; Zhan, X.; Zhang, T.; Zhou, L.; Shi, J.; Wei, S. An RCS Measurement Method Using Sparse Imaging Based 3D SAR Complex Image. IEEE Antennas Wirel. Propag. Lett. 2022, 21, 24–28. [Google Scholar] [CrossRef]
- Peng, J.; Xie, Q.; Zhao, Q.; Wang, Y.; Yee, L.; Meng, D. Enhanced 3DTV Regularization and Its Applications on HSI Denoising and Compressed Sensing. IEEE Trans. Image Process. 2020, 29, 7889–7903. [Google Scholar] [CrossRef]
- Barbero, A.; Sra, S. Modular Proximal Optimization for Multidimensional Total-Variation Regularization. J. Mach. Learn. Res. 2018, 19, 1–82. [Google Scholar]
- Pu, W.; Wang, X.; Wu, J.; Huang, Y.; Yang, J. Video SAR Imaging Based on Low-Rank Tensor Recovery. IEEE Trans. Neural Netw. Learn. Syst 2021, 32, 188–202. [Google Scholar] [CrossRef]
- Zhang, Y.; Tuo, X.; Huang, Y.; Yang, J. A TV Forward-Looking Superre-solution Imaging Method Based on TSVD Strategy for Scanning Radar. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4517–4528. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, S.; Fang, C.; Wu, R.; Han, P.; Xing, M. Structure-Awareness SAR Imagery by Exploiting Structure Tensor TV Regularization Under Multitask Learning Framework. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, B.; Chen, J.; Hong, W. Structured Low-Rank and Sparse Method for ISAR Imaging with 2-D Compressive Sampling. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5239014. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Y.; Zhang, C.; Zhan, X.; Sun, G.; Liu, Y.; Mao, Y. Array Three-Dimensional SAR Imaging via Composite Low-Rank and Sparse Prior. Remote Sens. 2025, 17, 321. [Google Scholar] [CrossRef]
- Karakuş, O.; Achim, A. On Solving SAR Imaging Inverse Problems Using Nonconvex Regularization with A Cauchy-Based Penalty. IEEE Trans. Geosci. Remote Sens. 2020, 59, 5828–5840. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, B.; Wu, Y. Undistorted and Consistent Enhancement of Automotive SAR Image via Multi-Segment-Reweighted Regularization. Remote Sens. 2025, 17, 1483. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, L.; Zhan, X.; Sun, G.; Liu, Y. 3D mmW Sparse Imaging Via Complex-Valued Composite Penalty Function Within Collaborative Multitasking Framework. Signal Process. 2025, 233, 109939. [Google Scholar] [CrossRef]
- Xu, K.; Sun, G.; Ji, Y.; Ding, Z.; Chen, W. Multiple-Input Multiple-Output Synthetic Aperture Radar Waveform and Filter Design in the Presence of Uncertain Interference Environment. Remote Sens. 2024, 16, 4413. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y.; Huang, Y.; Zhang, Y.; Pei, J.; Yi, Q.; Li, W.; Yang, J. TV-Sparse Super-Resolution Method for Radar Forward-Looking Imaging. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6534–6549. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | SP | GEO | ASAR-MPC | |||
|---|---|---|---|---|---|---|
| AR | HR | AR | HR | AR | HR | |
| 10 dB | 0.198 | 0.215 | 0.239 | 0.239 | 0.195 | 0.210 |
| 0 dB | 0.231 | 0.230 | 0.239 | 0.244 | 0.225 | 0.225 |
| Method | SP | GEO | ASAR-MPC | ||||
|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | PSNR (dB) | SSIM | ||
| 50% | 10 dB | 12.35 | 0.8478 | 14.03 | 0.9161 | 15.40 | 0.9580 |
| 0 dB | 11.25 | 0.7695 | 13.55 | 0.9098 | 14.08 | 0.9423 | |
| 25% | 10 dB | 11.04 | 0.7103 | 11.50 | 0.7676 | 11.83 | 0.8023 |
| 0 dB | 10.92 | 0.6896 | 11.11 | 0.7242 | 11.42 | 0.7717 | |
| Method | SP | GEO | ASAR-MPC | ||||
|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | PSNR (dB) | SSIM | ||
| 50% | 10 dB | 7.84 | 0.5892 | 9.71 | 0.7473 | 11.15 | 0.8312 |
| 0 dB | 7.73 | 0.5451 | 9.04 | 0.6987 | 9.18 | 0.7016 | |
| 25% | 10 dB | 7.57 | 0.5094 | 8.00 | 0.5899 | 8.14 | 0.6105 |
| 0 dB | 7.49 | 0.4870 | 7.62 | 0.5221 | 7.86 | 0.5676 | |
| Method | SP | GEO | ASAR-MPC | |||
|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | PSNR (dB) | SSIM | |
| 50% | 25.55 | 0.9280 | 17.61 | 0.6408 | 26.56 | 0.9384 |
| 25% | 24.99 | 0.8454 | 14.39 | 0.4693 | 26.45 | 0.9377 |
| Method | SP | GEO | ASAR-MPC | ||||
|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | PSNR (dB) | SSIM | ||
| Snip | 50% | 24.38 | 0.8908 | 25.05 | 0.9342 | 28.81 | 0.9816 |
| 25% | 18.78 | 0.7718 | 19.85 | 0.8243 | 21.42 | 0.8481 | |
| Wrench | 50% | 18.50 | 0.8338 | 22.40 | 0.9348 | 23.26 | 0.9471 |
| 25% | 17.85 | 0.8164 | 21.01 | 0.9244 | 22.81 | 0.9444 | |
| Method | SP | GEO | ASAR-MPC | |||
|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | PSNR (dB) | SSIM | PSNR (dB) | SSIM | |
| 50% | 14.08 | 0.6719 | 15.21 | 0.7468 | 16.98 | 0.8340 |
| 25% | 13.55 | 0.6293 | 15.07 | 0.7304 | 16.35 | 0.8022 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhou, Z.; He, Z.; Zhan, X.; Yu, J.; Han, X.; Zhang, X.; Yang, Z.; An, J. SAR 3D Reconstruction Based on Multi-Prior Collaboration. Remote Sens. 2025, 17, 2105. https://doi.org/10.3390/rs17122105
Wang Y, Zhou Z, He Z, Zhan X, Yu J, Han X, Zhang X, Yang Z, An J. SAR 3D Reconstruction Based on Multi-Prior Collaboration. Remote Sensing. 2025; 17(12):2105. https://doi.org/10.3390/rs17122105
Chicago/Turabian StyleWang, Yangyang, Zhenxiao Zhou, Zhiming He, Xu Zhan, Jiapan Yu, Xingcheng Han, Xiaoling Zhang, Zhiliang Yang, and Jianping An. 2025. "SAR 3D Reconstruction Based on Multi-Prior Collaboration" Remote Sensing 17, no. 12: 2105. https://doi.org/10.3390/rs17122105
APA StyleWang, Y., Zhou, Z., He, Z., Zhan, X., Yu, J., Han, X., Zhang, X., Yang, Z., & An, J. (2025). SAR 3D Reconstruction Based on Multi-Prior Collaboration. Remote Sensing, 17(12), 2105. https://doi.org/10.3390/rs17122105