
Direct Estimation of Forest Aboveground Biomass from UAV LiDAR and RGB Observations in Forest Stands with Various Tree Densities

 , , ,
, , ,
Abstract
1. Introduction
2. Materials and Methods
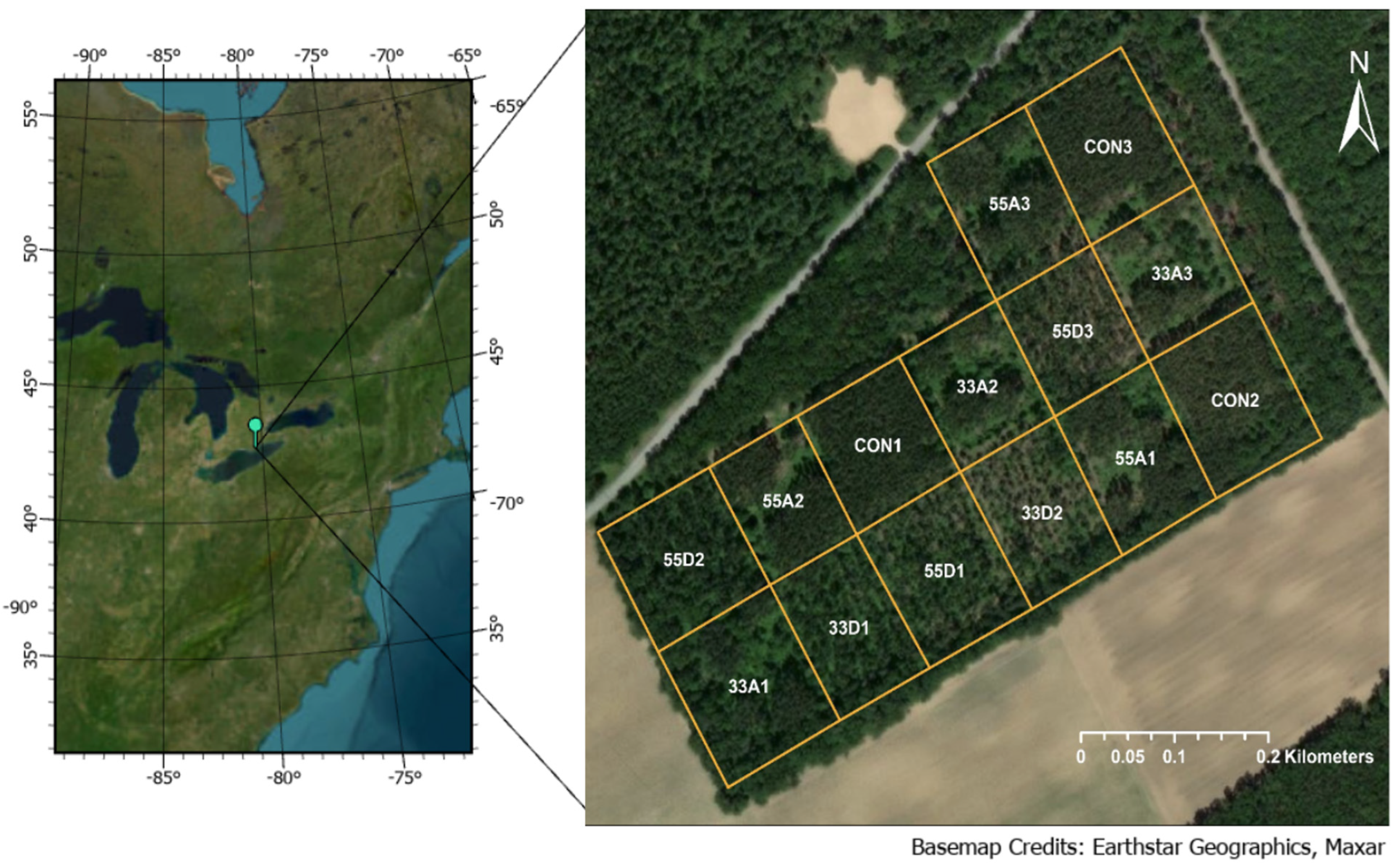
2.1. Site Description
2.2. Data
2.3. Individual Tree Detection and Delineation
2.4. Tree-Level Aboveground Biomass (AGB) Estimation and Validation
3. Results
3.1. Unsupervised and Self-Supervised Methods for Crown, Height, and AGB Estimation
3.2. The Impact of Tree Density and Aggregation on Estimating Tree-Level AGB
3.3. Estimating AGB Density and Growth
4. Discussion and Summary
4.1. LiDAR- and RGB-Based Tree Height Estimation and Crown Delineation
4.2. Tree-Level AGB Estimation
4.3. Biomass Growth Response of VRH
4.4. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Martire, S.; Castellani, V.; Sala, S. Carrying capacity assessment of forest resources: Enhancing environmental sustainability in energy production at local scale. Resour. Conserv. Recycl. 2015, 94, 11–20. [Google Scholar] [CrossRef]
- Gonsamo, A.; Chen, J.M. Evaluation of the GLC2000 and NALC2005 land cover products for LAI retrieval over Canada. Can. J. Remote Sens. 2011, 37, 302–313. [Google Scholar] [CrossRef]
- Sothe, C.; Gonsamo, A.; Arabian, J.; Kurz, W.A.; Finkelstein, S.A.; Snider, J. Large Soil Carbon Storage in Terrestrial Ecosystems of Canada. Glob. Biogeochem. Cycles 2022, 36, e2021GB007213. [Google Scholar] [CrossRef]
- Lambert, M.C.; Ung, C.H.; Raulier, F. Canadian national tree aboveground biomass equations. Can. J. For. Res. 2005, 35, 1996–2018. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Pappas, C.; Bélanger, N.; Bergeron, Y.; Blarquez, O.; Chen, H.Y.; Comeau, P.G.; De Grandpré, L.; Delagrange, S.; DesRochers, A.; Diochon, A.; et al. Smartforests Canada: A Network of Monitoring Plots for Forest Management Under Environmental Change. In Climate-Smart Forestry in Mountain Regions; Managing Forest Ecosystems; Springer: Cham, Switzerland, 2022; Chapter 16; pp. 521–543. [Google Scholar]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Jucker, T.; Fischer, F.J.; Chave, J.; Coomes, D.A.; Caspersen, J.; Ali, A.; Loubota Panzou, G.J.; Feldpausch, T.R.; Falster, D.; Usoltsev, V.A.; et al. Tallo: A global tree allometry and crown architecture database. Glob. Chang. Biol. 2022, 28, 5254–5268. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-centric mapping of forest carbon density from airborne laser scanning and hyperspectral data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef]
- Kim, S.R.; Kwak, D.A.; Lee, W.K.; Son, Y.; Bae, S.W.; Kim, C.; Yoo, S. Estimation of carbon storage based on individual tree detection in Pinus densiflora stands using a fusion of aerial photography and LiDAR data. Sci. China Life Sci. 2010, 53, 885–897. [Google Scholar] [CrossRef]
- Ni-Meister, W.; Lee, S.; Strahler, A.H.; Woodcock, C.E.; Schaaf, C.; Yao, T.; Ranson, K.J.; Sun, G.; Blair, J.B. Assessing general relationships between aboveground biomass and vegetation structure parameters for improved carbon estimate from lidar remote sensing. J. Geophys. Res. Biogeosci. 2010, 115, G00E11. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2016, 38, 2392–2410. [Google Scholar] [CrossRef]
- Yun, T.; Jiang, K.; Li, G.; Eichhorn, M.P.; Fan, J.; Liu, F.; Chen, B.; An, F.; Cao, L. Individual tree crown segmentation from airborne LiDAR data using a novel Gaussian filter and energy function minimization-based approach. Remote Sens. Environ. 2021, 256, 112307. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. Individual mangrove tree measurement using UAV-based LiDAR data: Possibilities and challenges. Remote Sens. Environ. 2019, 223, 34–49. [Google Scholar] [CrossRef]
- Wielgosz, M.; Puliti, S.; Xiang, B.; Schindler, K.; Astrup, R. SegmentAnyTree: A sensor and platform agnostic deep learning model for tree segmentation using laser scanning data. Remote Sens. Environ. 2024, 313, 114367. [Google Scholar] [CrossRef]
- Hao, Z.; Lin, L.; Post, C.J.; Mikhailova, E.A.; Li, M.; Chen, Y.; Yu, K.; Liu, J. Automated tree-crown and height detection in a young forest plantation using mask region-based convolutional neural network (Mask R-CNN). ISPRS J. Photogramm. Remote Sens. 2021, 178, 112–123. [Google Scholar] [CrossRef]
- Freudenberg, M.; Magdon, P.; Nölke, N. Individual tree crown delineation in high-resolution remote sensing images based on U-Net. Neural Comput. Appl. 2022, 34, 22197–22207. [Google Scholar] [CrossRef]
- Brandt, M.; Tucker, C.J.; Kariryaa, A.; Rasmussen, K.; Abel, C.; Small, J.; Chave, J.; Rasmussen, L.V.; Hiernaux, P.; Diouf, A.A.; et al. An unexpectedly large count of trees in the West African Sahara and Sahel. Nature 2020, 587, 78–82. [Google Scholar] [CrossRef]
- Leckie, D. Stand delineation and composition estimation using semi-automated individual tree crown analysis. Remote Sens. Environ. 2003, 85, 355–369. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Aubry-Kientz, M.; Vincent, G.; Senyondo, H.; White, E.P.; Record, S. DeepForest: A Python package for RGB deep learning tree crown delineation. Methods Ecol. Evol. 2020, 11, 1743–1751. [Google Scholar] [CrossRef]
- So, K.; Rogers, C.A.; Li, Y.; Arain, M.A.; Gonsamo, A. Retention forestry as a climate solution: Assessing biomass, soil carbon and albedo impacts in a northern temperate coniferous forest. Sci. Total Env. 2024, 947, 174680. [Google Scholar] [CrossRef]
- Zugic, J.I.; Pisaric, M.F.J.; McKenzie, S.M.; Parker, W.C.; Elliott, K.A.; Arain, M.A. The Impact of Variable Retention Harvesting on Growth and Carbon Sequestration of a Red Pine (Pinus resinosa Ait.) Plantation Forest in Southern Ontario, Canada. Front. For. Glob. Chang. 2021, 4, 725890. [Google Scholar] [CrossRef]
- OMNRF. Forest Management Guide to Silviculture in the Great Lakes-St. Lawrence and Boreal Forests of Ontario; Government of Ontario: Toronto, ON, Cananda; Available online: https://www.ontario.ca/page/forest-management-guide-silviculture-great-lakes-st-lawrence-and-boreal-forests-ontario (accessed on 1 June 2025).
- Boyden, S.; Montgomery, R.; Reich, P.B.; Palik, B. Seeing the forest for the heterogeneous trees: Stand-scale resource distributions emerge from tree-scale structure. Ecol. Appl. 2012, 22, 1578–1588. [Google Scholar] [CrossRef]
- Bodo, A.V.; Arain, M.A. Effects of variable retention harvesting on canopy transpiration in a red pine plantation forest. Ecol. Process. 2022, 11, 28. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Wu, Q.; Huang, Y.; Chen, Z.; Wu, J. Individual tree crown delineation using localized contour tree method and airborne LiDAR data in coniferous forests. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 82–94. [Google Scholar] [CrossRef]
- Hu, B.; Jung, W. Individual Tree Crown Delineation from High Spatial Resolution Imagery Using U-Net. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2021, 61–66. [Google Scholar] [CrossRef]
- Gering, L.R.; May, D.M. The Relationship of Diameter at Breast Height and Crown Diameter for Four Species Groups in Hardin County, Tennessee. South. J. Appl. For. 1995, 19, 177–181. [Google Scholar] [CrossRef]
- Hemery, G.E.; Savill, P.S.; Pryor, S.N. Applications of the crown diameter–stem diameter relationship for different species of broadleaved trees. For. Ecol. Manag. 2005, 215, 285–294. [Google Scholar] [CrossRef]
- Barakat, R.M. A Comparison of Aboveground Biomass Estimates from Different Allometric Formulas Using Vegetation Sampling Protocol in Rouge National Urban Park. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2017. [Google Scholar]
- Gatziolis, D.; Fried, J.S.; Monleon, V.S. Challenges to Estimating Tree Height via LiDAR in Closed-Canopy Forests: A Parable from Western Oregon. For. Sci. 2010, 56, 139–155. [Google Scholar] [CrossRef]
- Lisiewicz, M.; Kaminska, A.; Sterenczak, K. Influence of the correction method of CHM−based Individual Tree Detection results on the estimation of forest stand characteristics. Sylwan 2022, 166, 362–377. [Google Scholar] [CrossRef]
- Hu, B.; Li, J.; Jing, L.; Judah, A. Improving the efficiency and accuracy of individual tree crown delineation from high-density LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 145–155. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar]
- Russell, M.B.; Weiskittel, A.R.; Kershaw, J.A. Comparing strategies for modeling individual-tree height and height-to-crown base increment in mixed-species Acadian forests of northeastern North America. Eur. J. For. Res. 2014, 133, 1121–1135. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.S.; Hudak, A.T.; Gessler, P.E.; Vierling, L.A.; Crookston, N.L. Automated estimation of individual conifer tree height and crown diameter via two-dimensional spatial wavelet analysis of lidar data. Can. J. Remote Sens. 2014, 32, 153–161. [Google Scholar] [CrossRef]
- Garber, S.M.; Monserud, R.A.; Maguire, D.A. Crown Recession Patterns in Three Conifer Species of the Northern Rocky Mountains. For. Sci. 2008, 54, 633–646. [Google Scholar] [CrossRef]
- Van Deusen, P.C.; Heath, L.S. Weighted analysis methods for mapped plot forest inventory data: Tables, regressions, maps and graphs. For. Ecol. Manag. 2010, 260, 1607–1612. [Google Scholar] [CrossRef]
- Martin, M.E.; Newman, S.D.; Aber, J.D.; Congalton, R.G. Determining Forest Species Composition Using High Spectral Resolution Remote Sensing Data. Remote Sens. Environ. 1998, 65, 249–254. [Google Scholar] [CrossRef]
- Wan Mohd Jaafar, W.S.; Woodhouse, I.H.; Silva, C.A.; Omar, H.; Abdul Maulud, K.N.; Hudak, A.T.; Klauberg, C.; Cardil, A.; Mohan, M. Improving Individual Tree Crown Delineation and Attributes Estimation of Tropical Forests Using Airborne LiDAR Data. Forests 2018, 9, 759. [Google Scholar] [CrossRef]
- Kutchartt, E.; Gayoso, J.; Guerra, J.; Pirotti, F.; Castagneri, D.; Matula, R.; Rojas, Y.; Olson, M.E.; Zwanzig, M. Shrub aboveground biomass estimation considering bulk volume geometry: General and specific models for 14 species in the Mediterranean central Chile. New For. 2024, 56, 13. [Google Scholar] [CrossRef]
- Boucher, Y.; Auger, I.; Arseneault, D.; Elzein, T.; Sirois, L. Long-term (1925–2015) forest structure reorganization in an actively managed temperate-boreal forest region of eastern North America. For. Ecol. Manag. 2021, 481, 118744. [Google Scholar] [CrossRef]
- Molina, E.; Valeria, O.; De Grandpre, L.; Ramirez, J.A.; Cyr, D.; Boulanger, Y. Projecting future aboveground biomass and productivity of managed eastern Canadian mixedwood boreal forest in response to climate change. For. Ecol. Manag. 2021, 487, 119016. [Google Scholar] [CrossRef]
- Nyamai, P.A.; Goebel, P.C.; Gregory Corace, R.; Hix, D.M. Regeneration patterns of key pine species in a mixed-pine forest indicate a positive effect of variable retention harvesting and an increase in recruitment with time. For. Ecosyst. 2020, 7, 50. [Google Scholar] [CrossRef]
- Westfall, J.A. A Comparison of Above-Ground Dry-Biomass Estimators for Trees in the Northeastern United States. North. J. Appl. For. 2012, 29, 26–34. [Google Scholar] [CrossRef]
- Kim, M.; Lee, W.-K.; Kim, Y.-S.; Lim, C.-H.; Song, C.; Park, T.; Son, Y.; Son, Y.-M. Impact of thinning intensity on the diameter and height growth ofLarix kaempferistands in central Korea. For. Sci. Technol. 2015, 12, 77–87. [Google Scholar] [CrossRef]
- Kanninen, M.; Pérez, D.; Montero, M.; Víquez, E. Intensity and timing of the first thinning of Tectona grandis plantations in Costa Rica: Results of a thinning trial. For. Ecol. Manag. 2004, 203, 89–99. [Google Scholar] [CrossRef]
- He, Q.; Chen, E.; An, R.; Li, Y. Above-Ground Biomass and Biomass Components Estimation Using LiDAR Data in a Coniferous Forest. Forests 2013, 4, 984–1002. [Google Scholar] [CrossRef]
- Bodo, A.V.; Parker, W.C.; Elliott, K.A.; Arain, M.A. Below canopy evapotranspiration in four different variable retention harvesting treatments in a red pine plantation forest. Hydrol. Process. 2023, 37, e14789. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot Abbreviation | Basal Area Retained Post-VRH Treatment (%) | Pattern of Thinning | Stand Density (Trees Plot−1) |
|---|---|---|---|
| CON | 100 | No thinning | 432 |
| 33A | 33 | Aggregated | 178 |
| 33D | 33 | Dispersed | 118 |
| 55A | 55 | Aggregated | 213 |
| 55D | 55 | Dispersed | 235 |
| Species | a | b | p Value | Ra2 | n |
|---|---|---|---|---|---|
| Red Maple | 2.81 | 3.50 | <2.2∙10−16 | 0.44 | 745 |
| Sugar Maple | 3.91 | −0.53 | <2.2∙10−16 | 0.57 | 4840 |
| Eastern White Pine | 5.17 | 1.02 | <2.2∙10−16 | 0.66 | 328 |
| Red Oak | 3.64 | 3.61 | <2.2∙10−16 | 0.68 | 477 |
| Black Cherry | 4.28 | −0.47 | 8.76∙10−15 | 0.53 | 79 |
| Red Pine | 5.50 | 4.34 | <2.2∙10−16 | 0.67 | 78 |
| Black Oak | 3.54 | 4.12 | <2.2∙10−16 | 0.68 | 105 |
| Thinning Treatment | Basal Area Retained (%) | Stand Density (Trees plot−1) | Ra2 LiDAR (n = 67) | Ra2 RGB (n = 43) |
|---|---|---|---|---|
| Control | 100 | 432 | 0.21 (0.06) | 0.80 (<0.001) |
| Aggregated | 33 | 178 | 0.40 (<0.01) | 0.79 (<0.001) |
| Aggregated | 55 | 213 | 0.04 (0.24) | 0.34 (0.13) |
| Dispersed | 33 | 118 | 0.39 (0.11) | 0.66 (<0.05) |
| Dispersed | 55 | 235 | 0.31 (<0.05) | 0.19 (0.18) |
| Overall | 223 | 0.29 (<0.001) | 0.47 (<0.001) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
So, K.; Chau, J.; Rudd, S.; Robinson, D.T.; Chen, J.; Cyr, D.; Gonsamo, A. Direct Estimation of Forest Aboveground Biomass from UAV LiDAR and RGB Observations in Forest Stands with Various Tree Densities. Remote Sens. 2025, 17, 2091. https://doi.org/10.3390/rs17122091
So K, Chau J, Rudd S, Robinson DT, Chen J, Cyr D, Gonsamo A. Direct Estimation of Forest Aboveground Biomass from UAV LiDAR and RGB Observations in Forest Stands with Various Tree Densities. Remote Sensing. 2025; 17(12):2091. https://doi.org/10.3390/rs17122091
Chicago/Turabian StyleSo, Kangyu, Jenny Chau, Sean Rudd, Derek T. Robinson, Jiaxin Chen, Dominic Cyr, and Alemu Gonsamo. 2025. "Direct Estimation of Forest Aboveground Biomass from UAV LiDAR and RGB Observations in Forest Stands with Various Tree Densities" Remote Sensing 17, no. 12: 2091. https://doi.org/10.3390/rs17122091
APA StyleSo, K., Chau, J., Rudd, S., Robinson, D. T., Chen, J., Cyr, D., & Gonsamo, A. (2025). Direct Estimation of Forest Aboveground Biomass from UAV LiDAR and RGB Observations in Forest Stands with Various Tree Densities. Remote Sensing, 17(12), 2091. https://doi.org/10.3390/rs17122091