
Sparse Inversion of Gravity and Gravity Gradient Data Using a Greedy Cosine Similarity Search Algorithm


Abstract
1. Introduction
2. Methodology
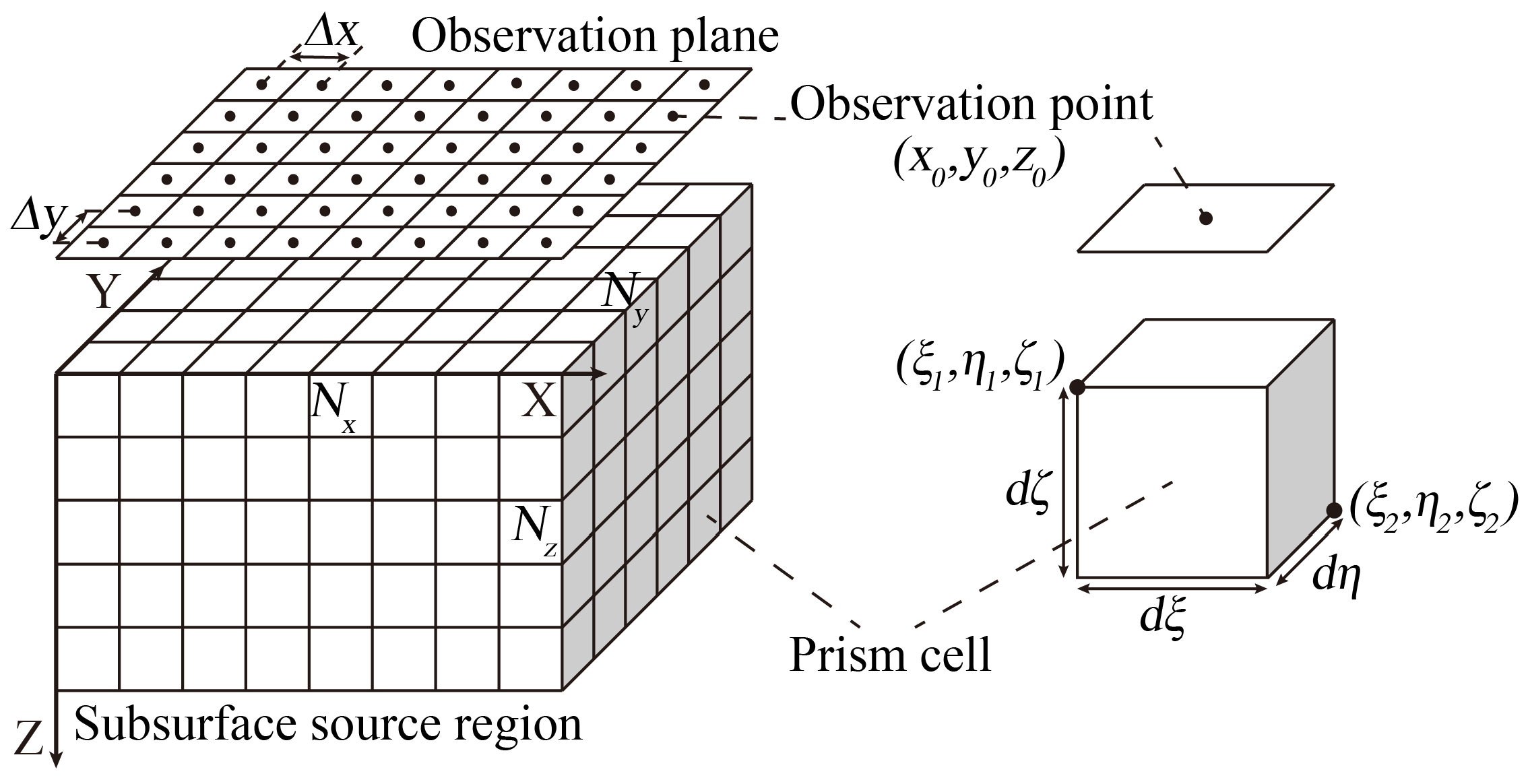
2.1. Forward Modeling
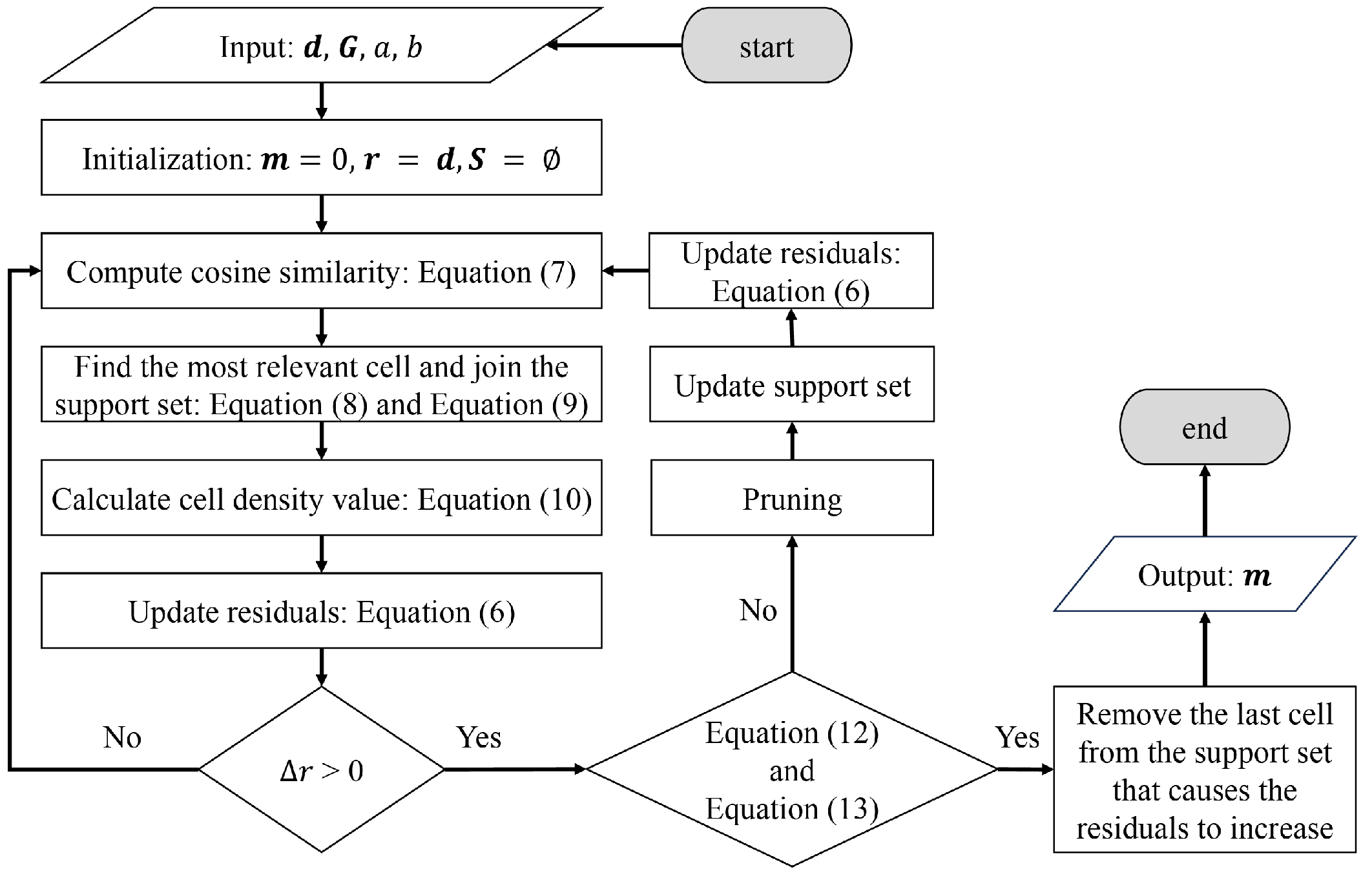
2.2. Greedy Cosine Similarity Search Algorithm (GCSSA)
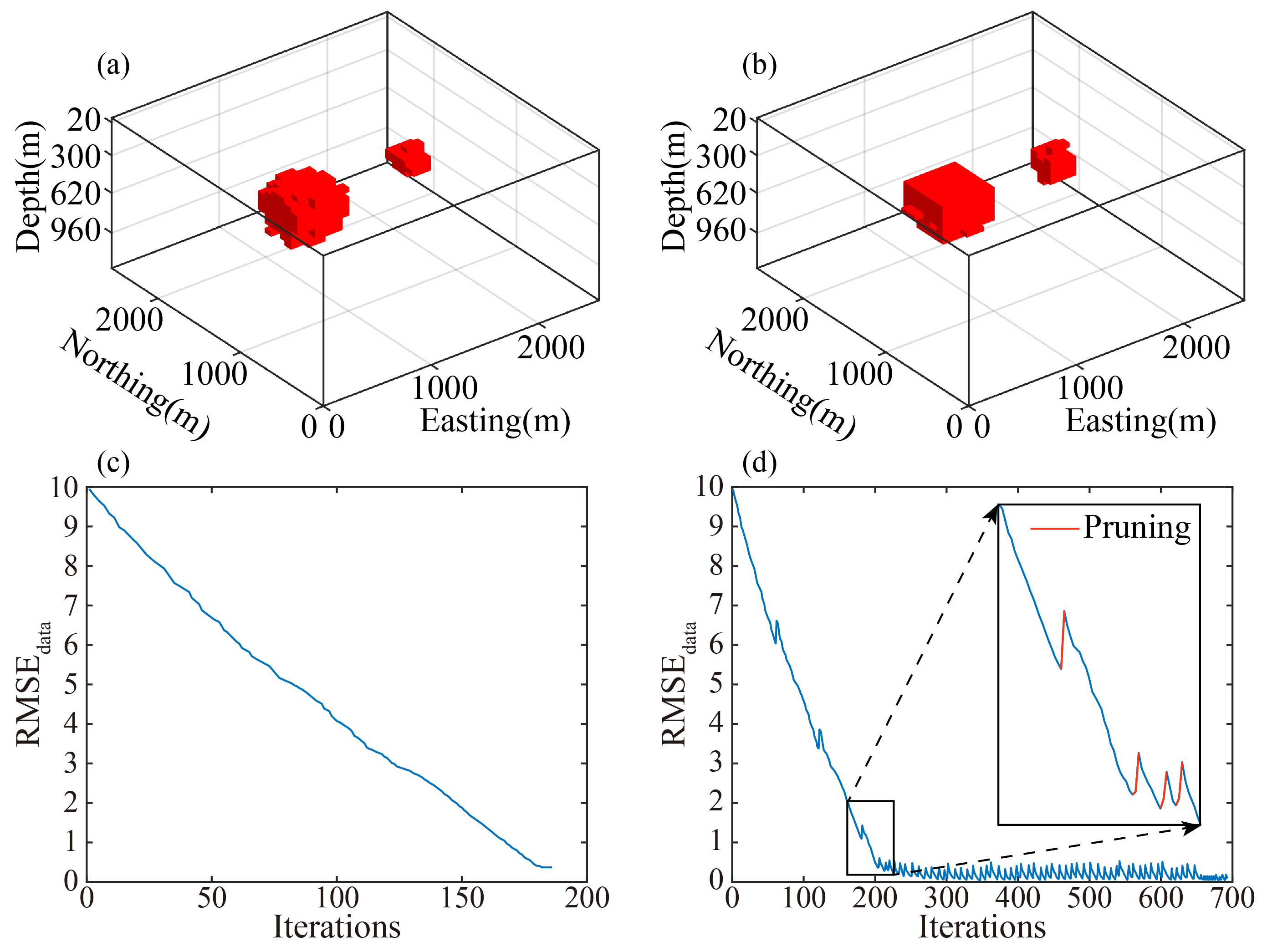
2.3. Pruning Mechanism
- 1.
- Cells exhibiting excessively large or small projection amplitudes on the residuals, which typically indicate overestimation or underestimation of depth;
- 2.
- Cells whose addition results in an increased residual norm, suggesting that they do not contribute to convergence and are likely misclassified;
- 3.
- Cells already included in the support set that exhibit high similarity to the current residuals but possess an opposite density sign, often reflecting previously selected compensation errors that may induce residual oscillations;
- 4.
- Spatially isolated cells that do not form part of a continuous geological structure, which are likely caused by noise and lack physical plausibility.
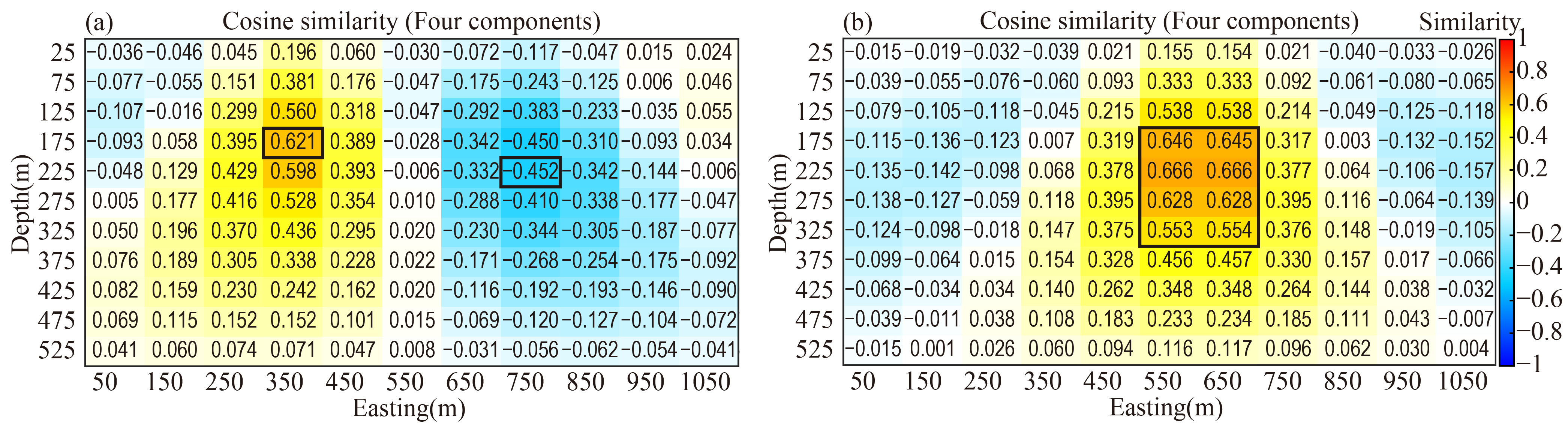
2.4. Related Cell Searches for Cosine Similarity in Joint Gravity and Gravity Gradient Data
3. Numerical Modeling Experiments and Analysis
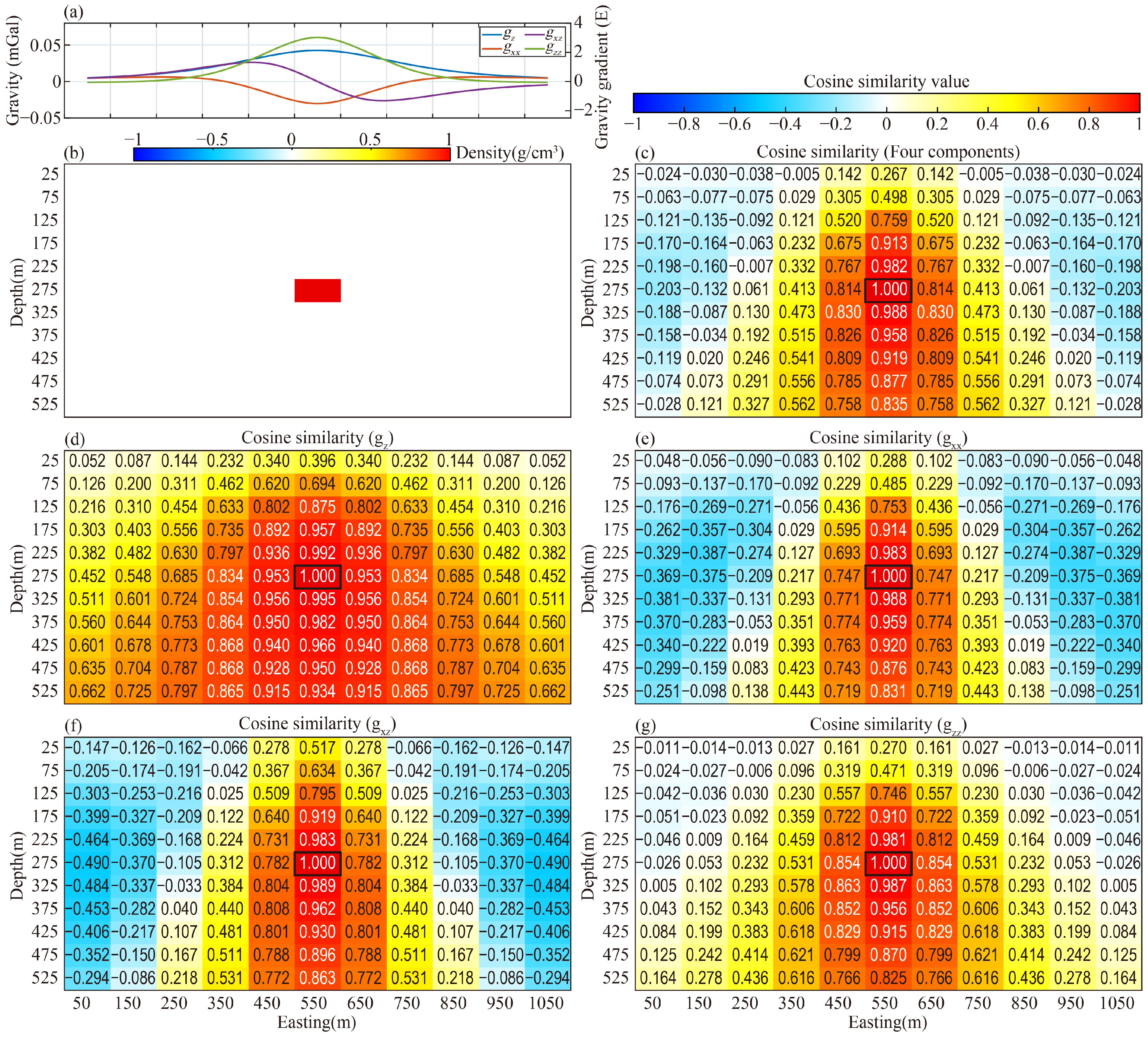
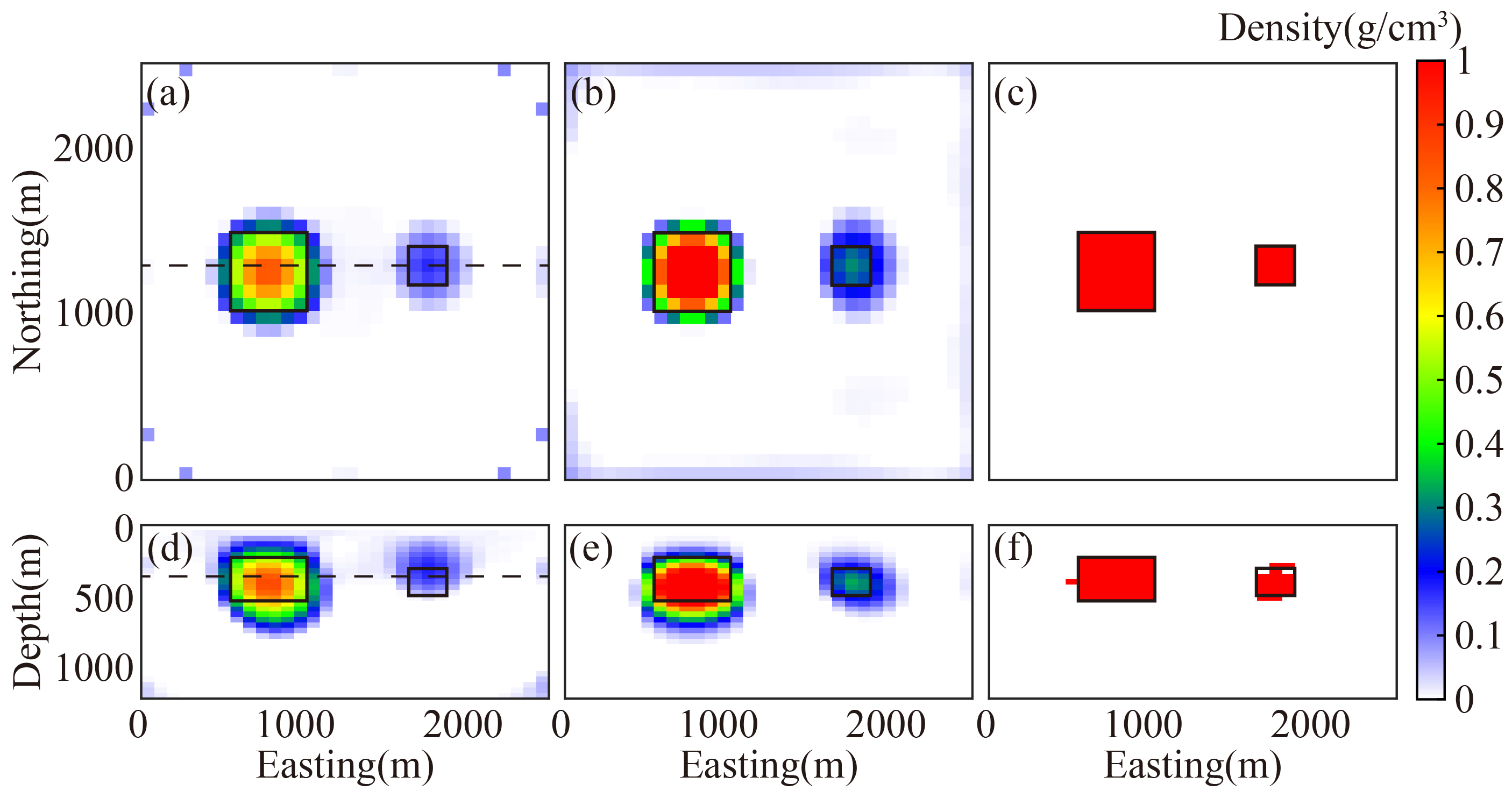
3.1. Feasibility Verification with a Simple Synthetic Model
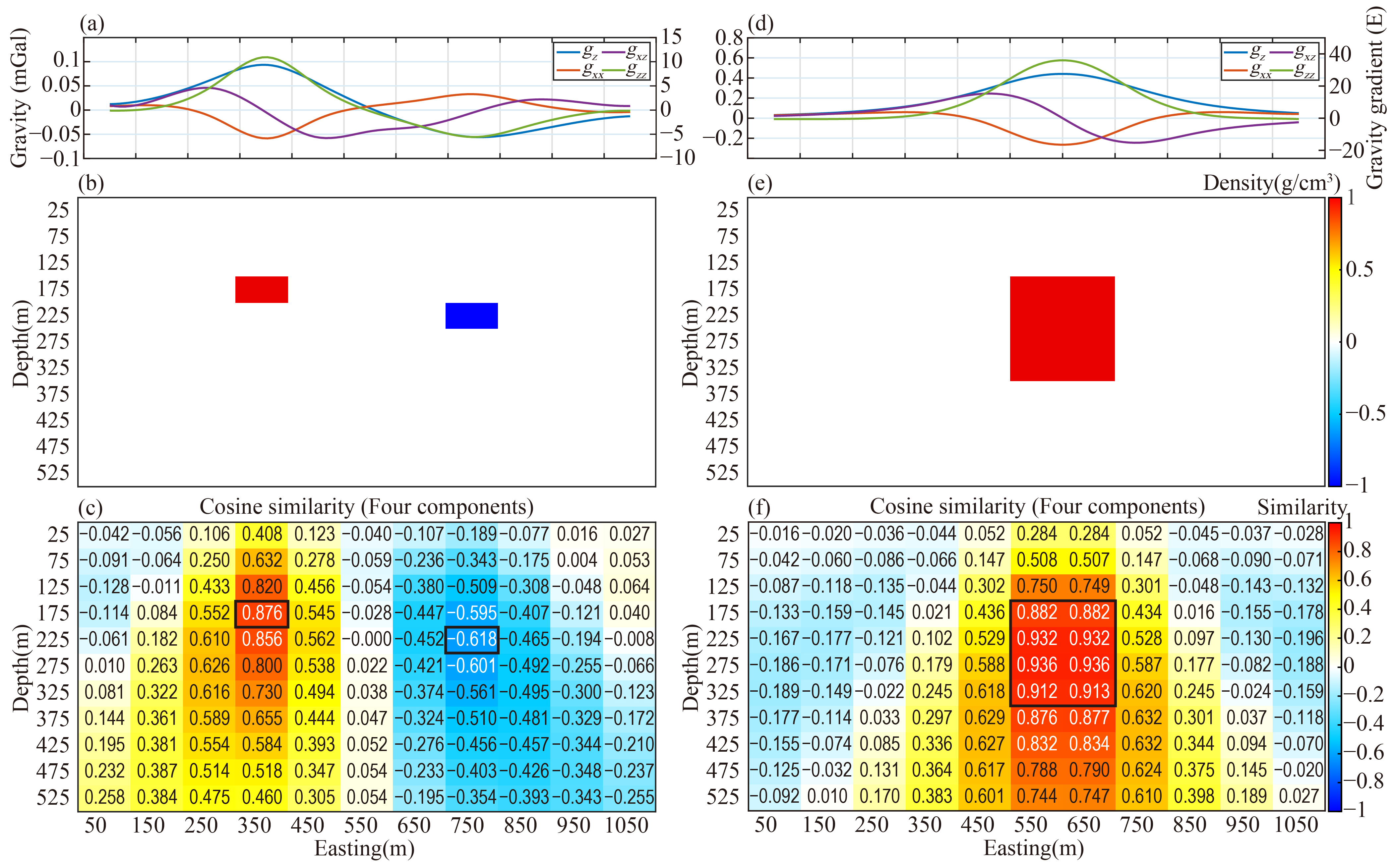
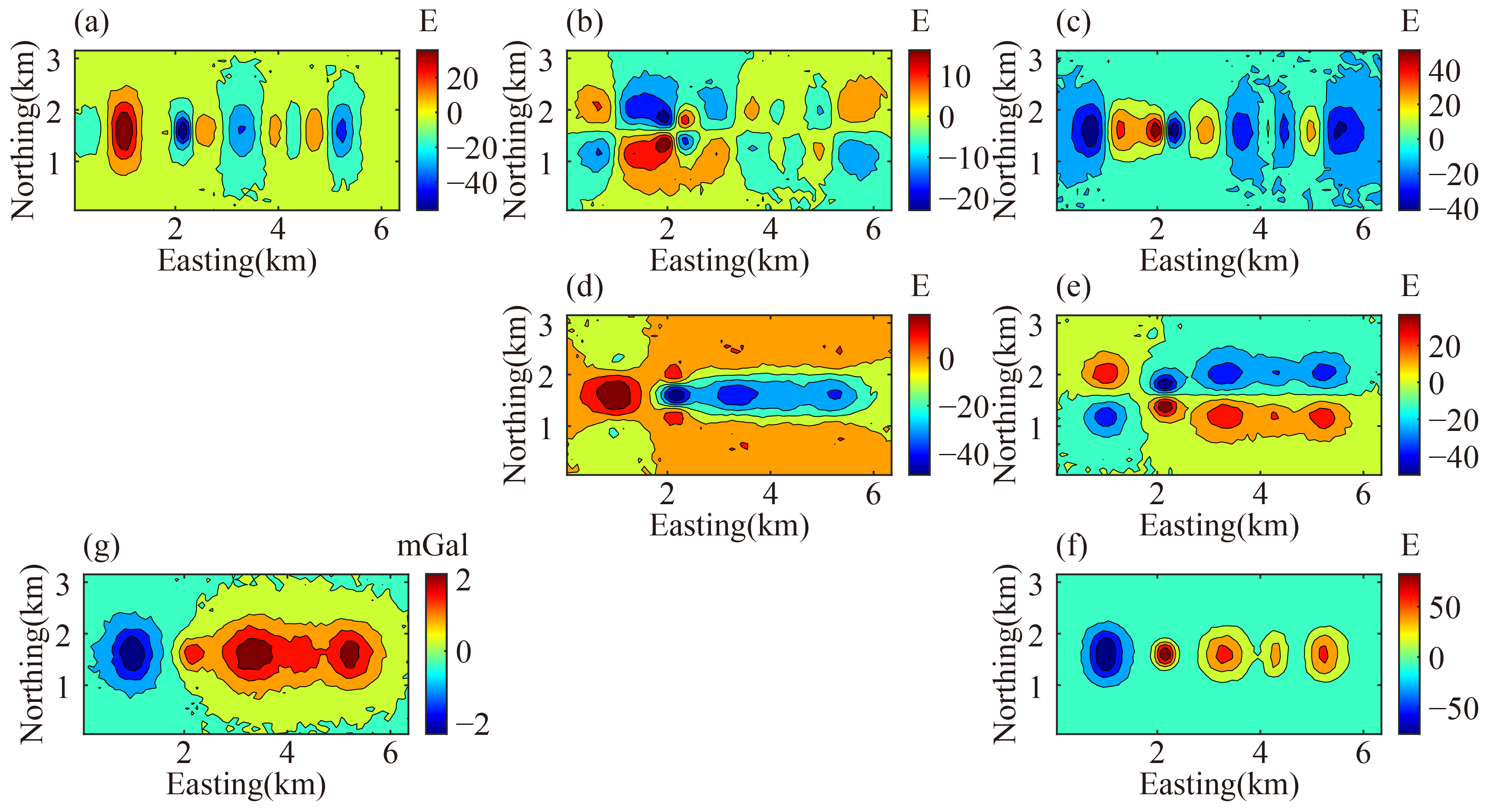
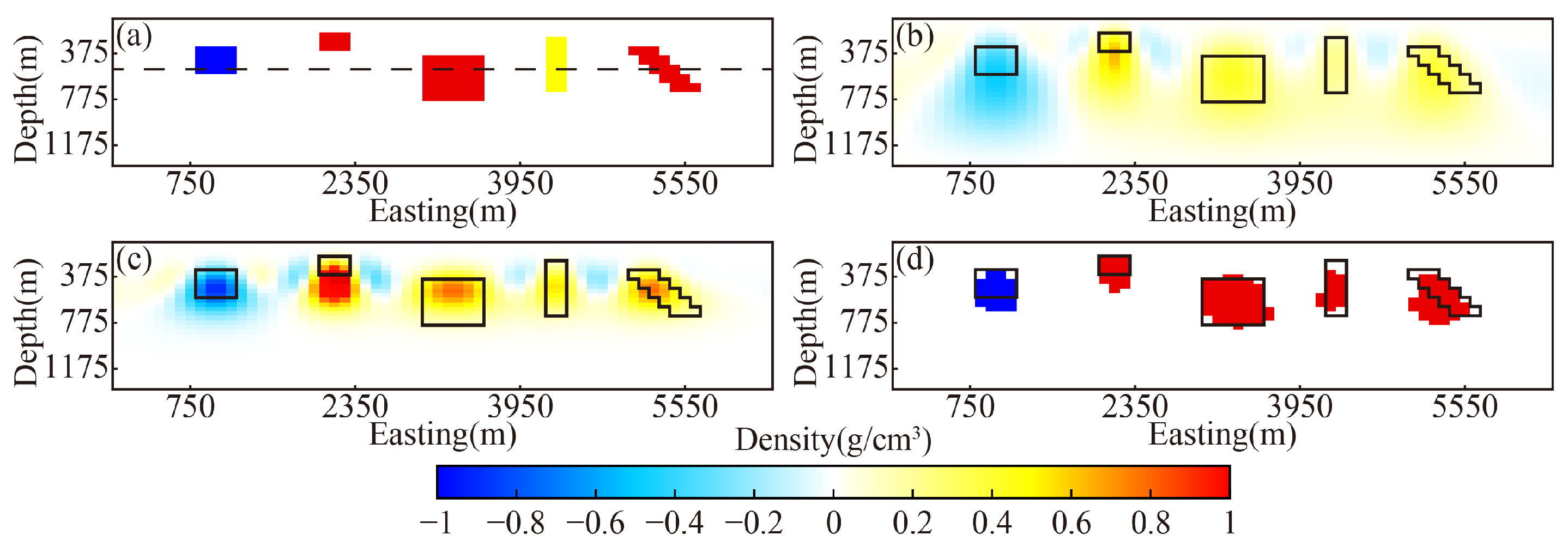
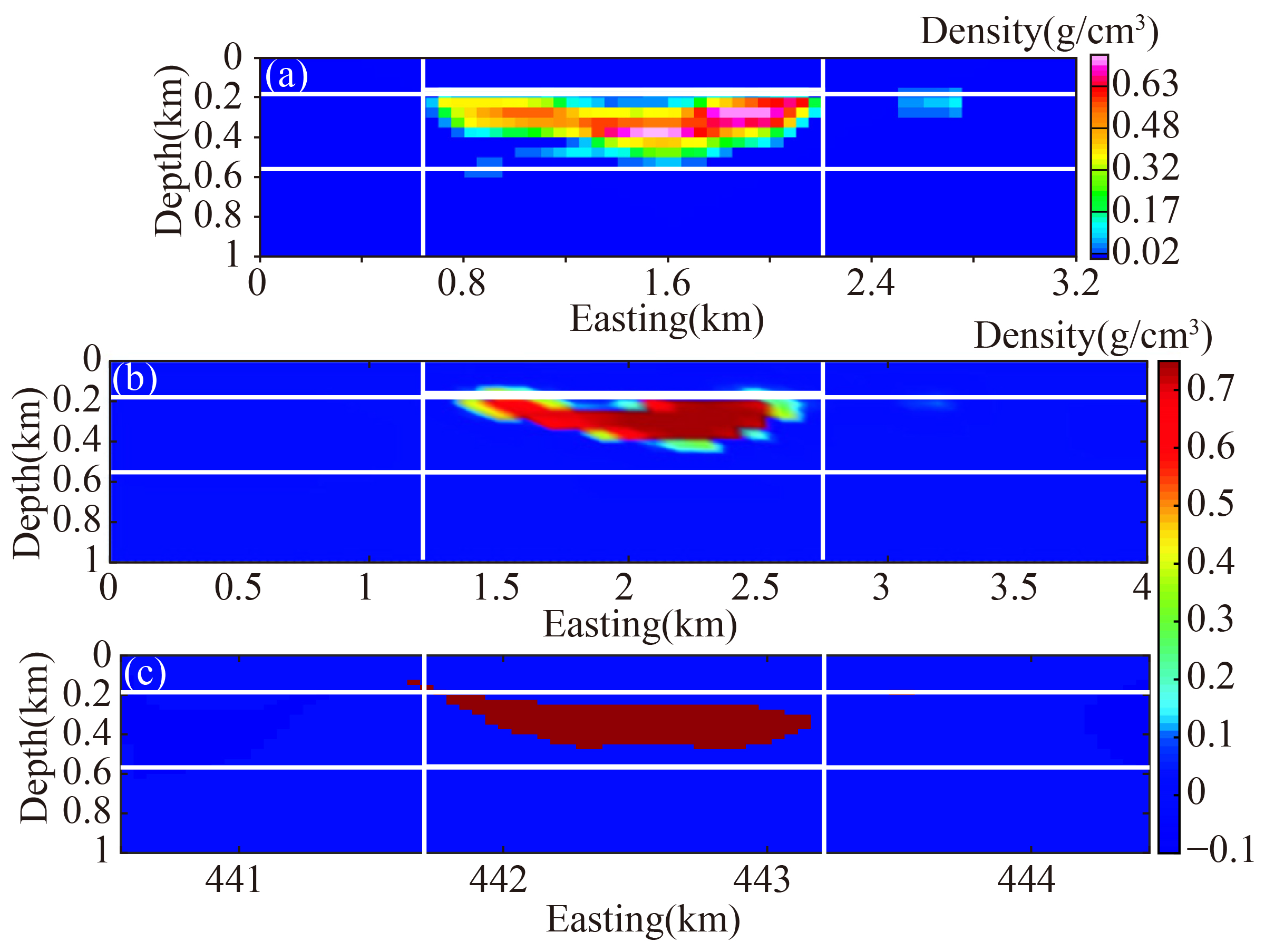
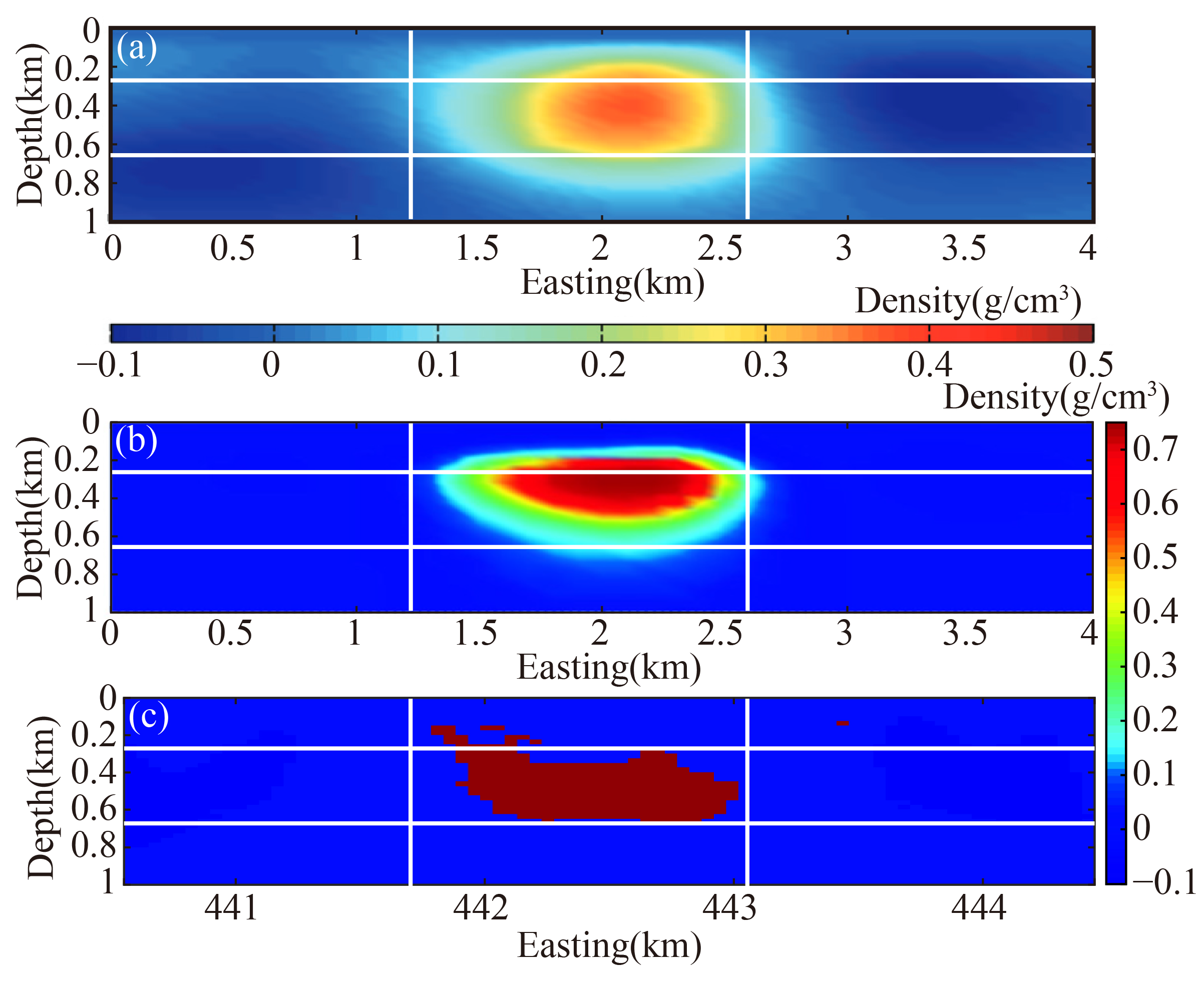
3.2. Robustness and Multi-Component Performance Evaluation with a Complex Model
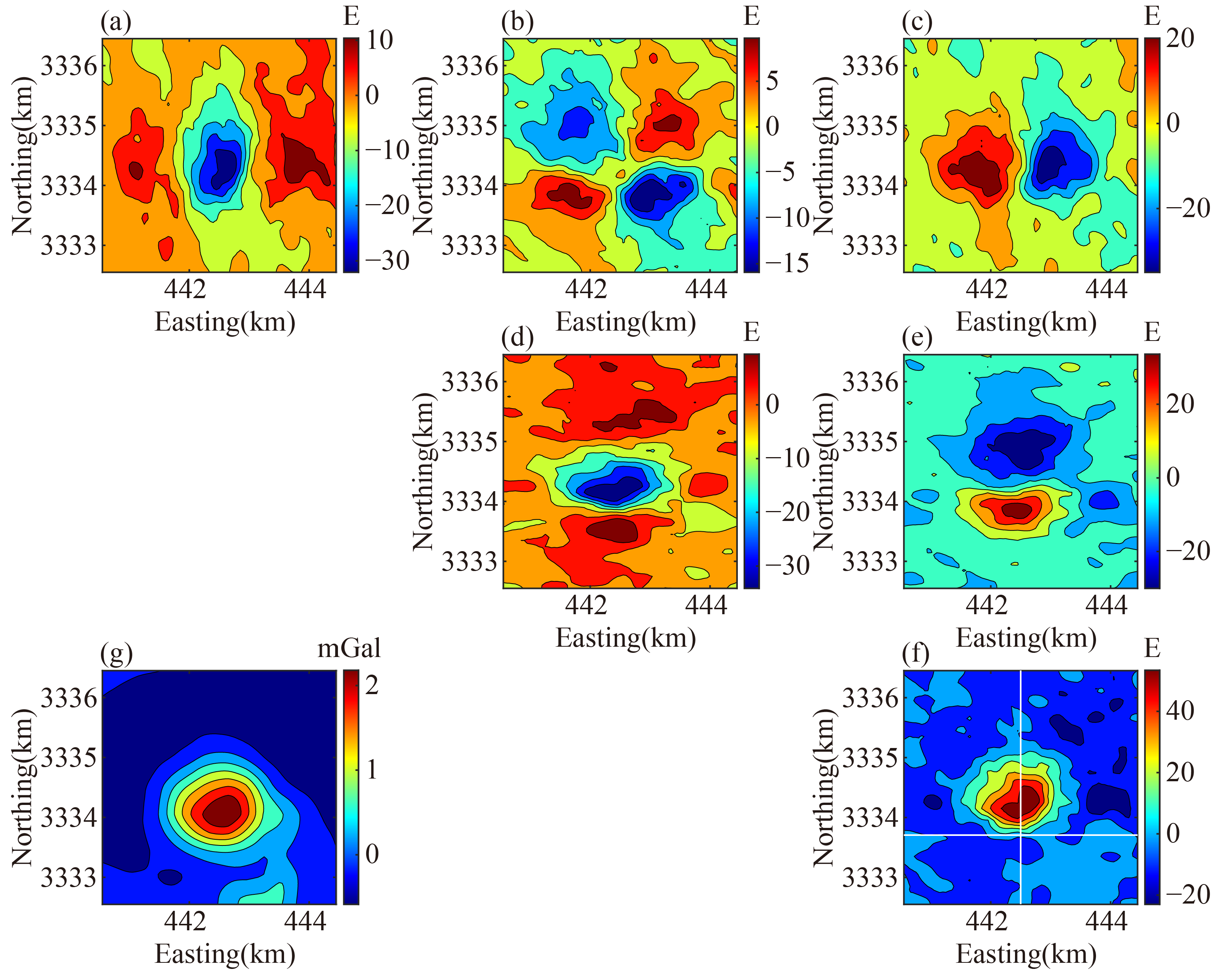
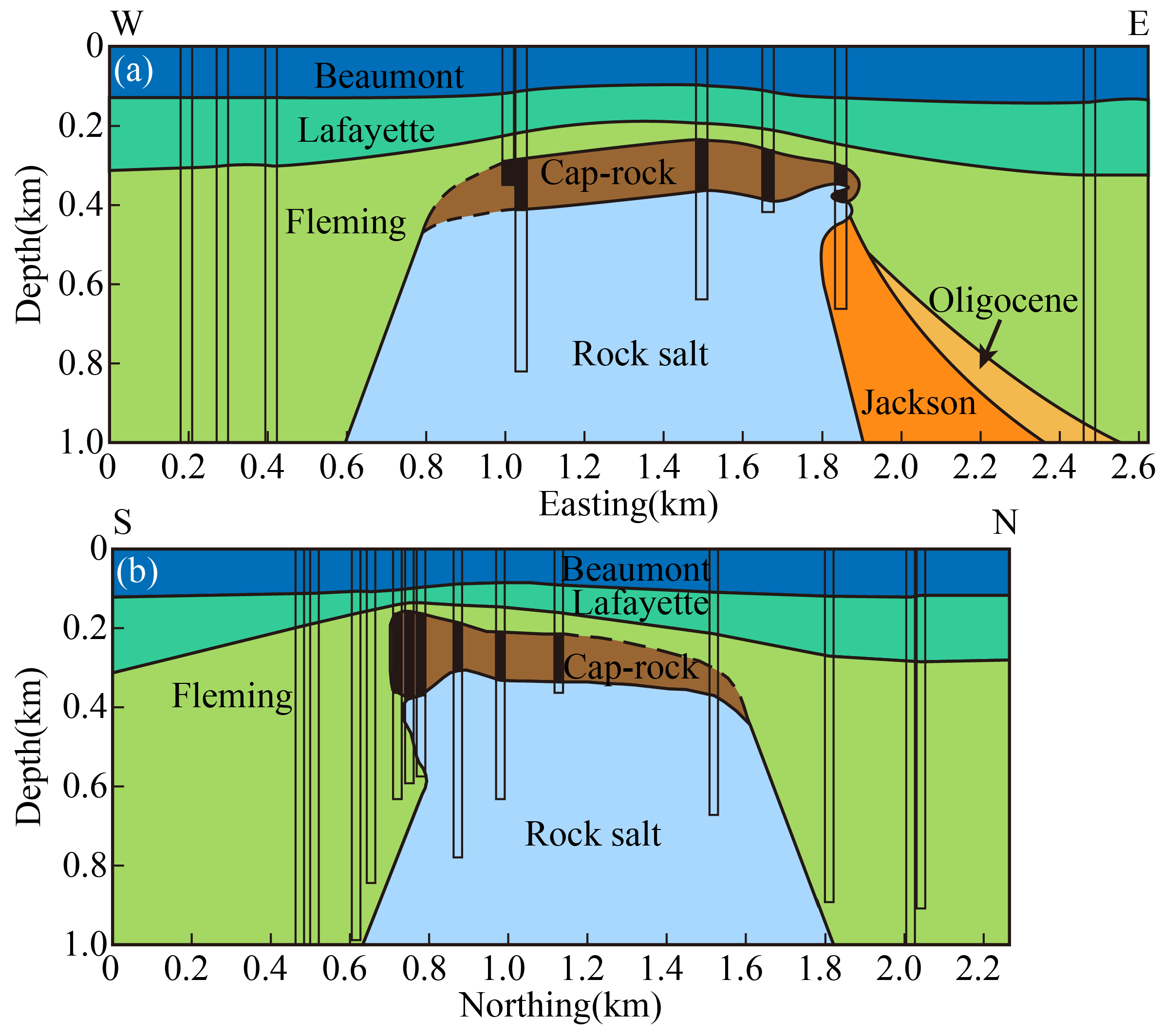
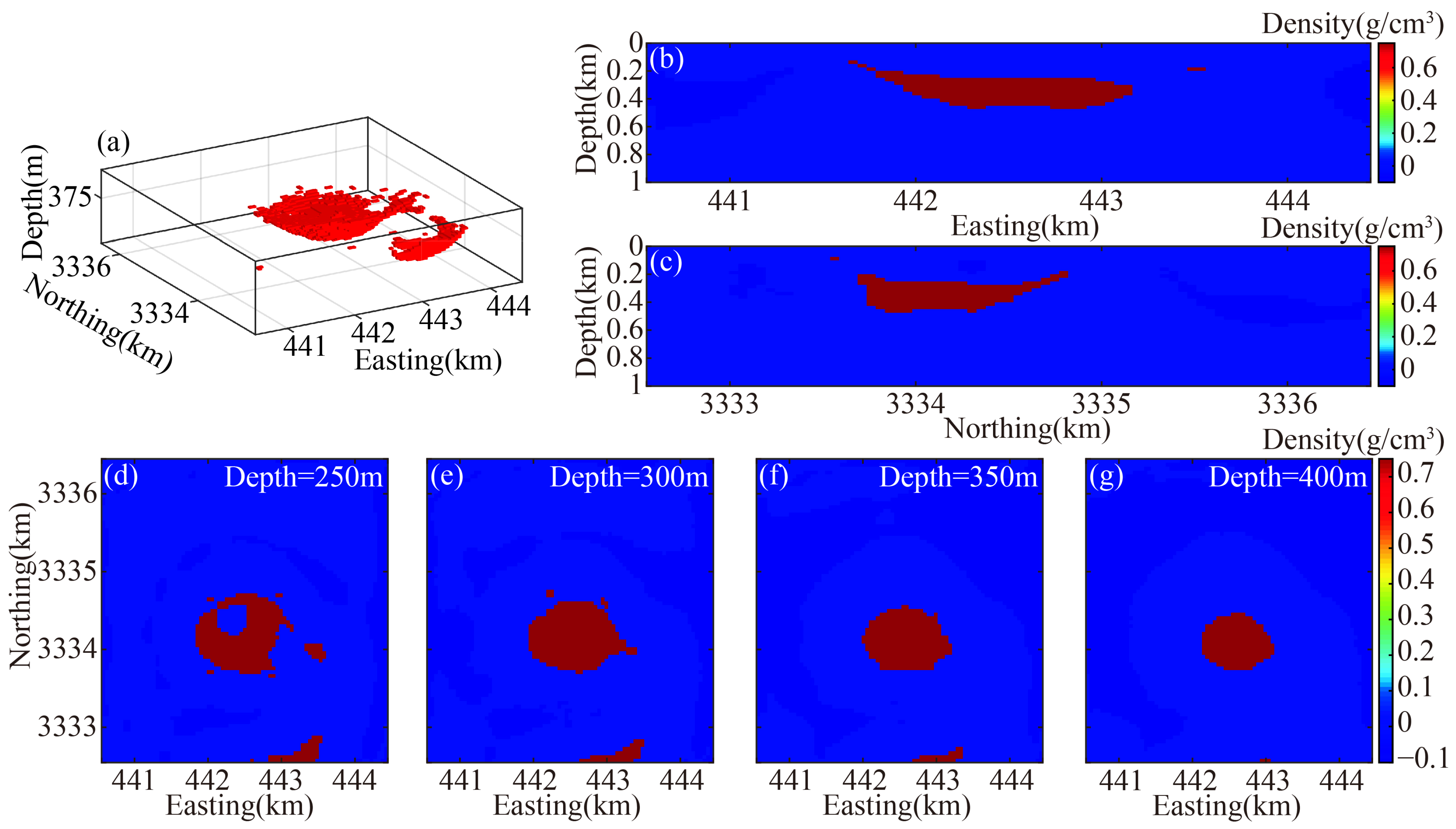
4. Application to Real Data
5. Conclusions and Suggestions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qiao, Z.K.; Zhang, Z.Y.; Hu, R.; Shen, Z.H.; Yuan, P.; Zhou, H.; Huang, X.Y.; Zhou, F.; Shi, H.Y.; Wu, X.M.; et al. Joint inversion of gravity and gravity gradient data based on cross-gradient function. IEEE Sens. J. 2024, 24, 20940–20948. [Google Scholar] [CrossRef]
- Wu, L.; Ke, X.; Hsu, H.; Fang, J.; Xiong, C.; Wang, Y. Joint gravity and gravity gradient inversion for subsurface object detection. IEEE Geosci. Remote Sens. Lett. 2013, 10, 865–869. [Google Scholar] [CrossRef]
- Qin, P.; Huang, D.; Yuan, Y.; Geng, M.; Liu, J. Integrated gravity and gravity gradient 3D inversion using the non-linear conjugate gradient. J. Appl. Geophy. 2016, 126, 52–73. [Google Scholar] [CrossRef]
- Ma, G.; Gao, T.; Li, L.; Wang, T.; Niu, R.; Li, X. High-Resolution Cooperate Density-Integrated Inversion Method of Airborne Gravity and Its Gradient Data. Remote Sens. 2021, 13, 4157. [Google Scholar] [CrossRef]
- He, H.; Fang, J.; Guo, D.; Cui, R.; Xue, Z. 3D density imaging using gravity and gravity gradient in the wavenumber domain and its application in the Decorah. Sci. Rep. 2024, 14, 134. [Google Scholar] [CrossRef] [PubMed]
- Qin, P.; Zhang, C.; Meng, Z.; Zhang, D.; Hou, Z. Three integrating methods for gravity and gravity gradient 3-D inversion and their comparison based on a new function of discrete stability. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Niu, T.; Zhang, G.; Zhang, M.; Zhang, G. Joint inversion of gravity and gravity gradient data using smoothed L 0 norm regularization algorithm with sensitivity matrix compression. Front. Earth Sci. 2023, 11, 1283238. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, G. Mineral exploration potential estimation using 3D inversion: A comparison of three different norms. Remote Sens. 2022, 14, 2537. [Google Scholar] [CrossRef]
- Li, Z.; Yao, C.; Zheng, Y.; Wang, J.; Zhang, Y. 3D magnetic sparse inversion using an interior-point method. Geophysics 2018, 83, J15–J32. [Google Scholar] [CrossRef]
- Capriotti, J.; Li, Y. Joint inversion of gravity and gravity gradient data: A systematic evaluation. Geophysics 2022, 87, G29–G44. [Google Scholar] [CrossRef]
- Li, Y.; Oldenburg, D.W. Fast inversion of large-scale magnetic data using wavelet transforms and a logarithmic barrier method. Geophys. J. Int. 2003, 152, 251–265. [Google Scholar] [CrossRef]
- Gebre, M.G.; Lewi, E. Gravity inversion method using L 0-norm constraint with auto-adaptive regularization and combined stopping criteria. Solid Earth 2023, 14, 101–117. [Google Scholar] [CrossRef]
- Gebre, M.G.; Lewi, E. L0-norm gravity inversion with new depth weighting function and bound constraints. Acta Geophys 2022, 70, 1619–1634. [Google Scholar] [CrossRef]
- Meng, Z. 3D inversion of full gravity gradient tensor data using SL0 sparse recovery. J. Appl. Geophy. 2016, 127, 112–128. [Google Scholar] [CrossRef]
- Meng, Z.H.; Xu, X.C.; Huang, D.N. Three-dimensional gravity inversion based on sparse recovery iteration using approximate zero norm. Appl. Geophys. 2018, 15, 524–535. [Google Scholar] [CrossRef]
- Zhao, C.; Yu, P.; Zhang, L. A new stabilizing functional to enhance the sharp boundary in potential field regularized inversion. J. Appl. Geophy. 2016, 135, 356–366. [Google Scholar] [CrossRef]
- Ye, L.; Zhang, Y.; Luo, C. Sparse inversion of potential field data based on Orthogonal Least Squares (OLS). Prog. Geophys. 2023, 38, 2611–2621. (In Chinese) [Google Scholar] [CrossRef]
- Hashemi, A.; Vikalo, H. Accelerated orthogonal least-squares for large-scale sparse reconstruction. Digit. Signal Process. 2018, 82, 91–105. [Google Scholar] [CrossRef]
- Renaut, R.A.; Hogue, J.D.; Vatankhah, S.; Liu, S. A fast methodology for large-scale focusing inversion of gravity and magnetic data using the structured model matrix and the 2-D fast Fourier transform. Geophys. J. Int. 2020, 223, 1378–1397. [Google Scholar] [CrossRef]
- Portniaguine, O.; Zhdanov, M.S. 3-D magnetic inversion with data compression and image focusing. Geophysics 2002, 67, 1532–1541. [Google Scholar] [CrossRef]
- Zhdanov, M.S.; Robert, E.; Souvik, M. Three-dimensional regularized focusing inversion of gravity gradient tensor component data. Geophysics 2004, 69, 925–937. [Google Scholar] [CrossRef]
- Portniaguine, O.; Zhdanov, M.S. Focusing geophysical inversion images. Geophysics 1999, 64, 874–887. [Google Scholar] [CrossRef]
- Zhdanov, M.S. New advances in regularized inversion of gravity and electromagnetic data. Geophys. Prospect. 2009, 57, 463–478. [Google Scholar] [CrossRef]
- Stocco, S.; Godio, A.; Sambuelli, L. Modelling and compact inversion of magnetic data: A Matlab code. Comput. Geosci. 2009, 35, 2111–2118. [Google Scholar] [CrossRef]
- Guillen, A.; Menichetti, V. Gravity and magnetic inversion with minimization of a specific functional. Geophysics 1984, 49, 1354–1360. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, X.; Chen, Z. Combined compact and smooth inversion for gravity and gravity gradiometry data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Last, B.J.; Kubik, K. Compact gravity inversion. Geophysics 1983, 48, 713–721. [Google Scholar] [CrossRef]
- Li, X.; Chouteau, M. Three-dimensional gravity modeling in all space. Surv. Geophys. 1998, 19, 339–368. [Google Scholar] [CrossRef]
- Hogue, J.D.; Renaut, R.A.; Vatankhah, S. A tutorial and open source software for the efficient evaluation of gravity and magnetic kernels. Comput. Geosci. 2020, 144, 104575. [Google Scholar] [CrossRef]
- Zhang, Y.; Wong, Y.S. BTTB-based numerical schemes for three-dimensional gravity field inversion. Geophys. J. Int. 2015, 203, 243–256. [Google Scholar] [CrossRef]
- Chen, L.; Liu, L. Fast and accurate forward modelling of gravity field using prismatic grids. Geophys. J. Int. 2019, 216, 1062–1071. [Google Scholar] [CrossRef]
- Sun, S.; Gao, X.; Cao, X. Fast 3D forward modeling of a potential field based on spherical symmetry of gravitational potential. Geophysics 2023, 88, G29–G42. [Google Scholar] [CrossRef]
- Vatankhah, S.; Huang, X.; Renaut, R.A.; Mickus, K.; Kabirzadeh, H.; Lin, J. Efficiently implementing and balancing the mixed Lp-norm joint inversion of gravity and magnetic data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–17. [Google Scholar] [CrossRef]
- Vatankhah, S.; Liu, S.; Renaut, R.A.; Hu, X.; Hogue, J.D.; Gharloghi, M. An Efficient Alternating Algorithm for the Lp-Norm Cross-Gradient Joint Inversion of Gravity and Magnetic Data Using the 2-D Fast Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Zhao, F.; Xu, Z.; Wang, L.; Zhu, N.; Xu, T.; Jonrinaldi, J. A population-based iterated greedy algorithm for distributed assembly no-wait flow-shop scheduling problem. IEEE Trans. Industr. Inform. 2023, 19, 6692–6705. [Google Scholar] [CrossRef]
- Wang, J.; Ng, M.; Perz, M. Seismic data interpolation by greedy local Radon transform. Geophysics 2010, 75, WB225–WB234. [Google Scholar] [CrossRef]
- Xue, Y.; Sen, M.K. Stochastic seismic inversion using greedy annealed importance sampling. J. Geophys. Eng. 2016, 13, 786–804. [Google Scholar] [CrossRef]
- Bai, Z.Z.; Wu, W.T. On greedy randomized Kaczmarz method for solving large sparse linear systems. SIAM J. Sci. Comput. 2018, 40, A592–A606. [Google Scholar] [CrossRef]
- Qiao, X.; Wu, H.; Roy, S.K.; Huang, W. Hyperspectral image classification based on 3D sharpened cosine similarity operation. In Proceedings of the IGARSS 2023–2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 7669–7672. [Google Scholar] [CrossRef]
- Qiao, X.; Roy, S.K.; Huang, W. 3-D Sharpened Cosine Similarity Operation for Hyperspectral Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 1114–1125. [Google Scholar] [CrossRef]
- Gao, X. The Study and Application of 3D Inversion Methods of Gravity and Magnetic and Their Gradient Tensor Data. PhD Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Li, Y.; Oldenburg, D.W. Joint inversion of surface and three-component borehole magnetic data. Geophysics 2000, 65, 540–552. [Google Scholar] [CrossRef]
- Ennen, C. Mapping Gas-Charged Fault Blocks Around the Vinton Salt Dome, Louisiana Using Gravity Gradiometry Data. Master’s Thesis, University of Houston, Houston, TX, USA, 2012. [Google Scholar]
- Thompson, S.A.; Eichelberger, O.H. Vinton salt dome, Calcasieu parish, Louisiana. Am. Assoc. Pet. Geol. Bull. 1928, 12, 385–394. [Google Scholar] [CrossRef]
- Coker, M.O. Aquitanian (Lower Miocene) Depositional Systems: Vinton Dome, onshore, Gulf of Mexico, Southwest Louisiana. Master’s Thesis, University of Houston, Houston, TX, USA, 2006. [Google Scholar]
- Geng, M.; Huang, D.; Yang, Q.; Liu, Y. 3D inversion of airborne gravity-gradiometry data using cokriging. Geophysics 2014, 79, G37–G47. [Google Scholar] [CrossRef]
- Oliveira, V.C., Jr.; Barbosa, V.C. 3-D radial gravity gradient inversion. Geophys. J. Int. 2013, 195, 883–902. [Google Scholar] [CrossRef]
- Chen, B.; Li, S.; Sun, Y.; Du, J.; Liu, J.; Qi, G. Joint inversion of gravity gradient tensor data based on L1 and L2 norms. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–8. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, G.; Liu, Y.; Fan, Z. Deep learning for 3-D inversion of gravity data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Chen, B.; Qi, G.; Du, J.; Li, S.; Sun, Y. 3-D gravity anomaly inversion for imaging salt structures, with application to Vinton Salt Dome, Gulf of Mexico. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–9. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Blocks 1 | Eastward Range (m) | Northward Range (m) | Depth Range (m) | Density (g/cm3) |
|---|---|---|---|---|
| Model block 1 | 800–1200 | 1200–2000 | 300–600 | −1 |
| Model block 2 | 2000–2300 | 1400–1800 | 150–350 | 1 |
| Model block 3 | 3000–3600 | 1300–1900 | 400–900 | 1 |
| Model block 4 | 4200–4400 | 1200–2000 | 200–800 | 0.5 |
| 2 Model block 5 | 5000–5700 | 1200–2000 | 300–800 | 1 |
| Noise Levels 1 | 0% | 1% | 2% | 5% | 10% | 15% | 20% | 35% |
|---|---|---|---|---|---|---|---|---|
| RMSEmodel(×) | 7.97 | 8.11 | 8.13 | 8.17 | 8.20 | 8.26 | 8.37 | 8.41 |
| MAE(×) | 7.08 | 7.31 | 7.34 | 7.40 | 7.46 | 7.55 | 7.74 | 7.80 |
| PCC | 0.768 | 0.759 | 0.758 | 0.757 | 0.754 | 0.749 | 0.743 | 0.736 |
| & | 6C | & 6C | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSEmodel (×) | 1.10 | 0.979 | 0.951 | 0.898 | 1.12 | 1.07 | 0.830 | 0.828 | 0.820 | 0.813 |
| MAE (×) | 1.28 | 1.03 | 0.98 | 0.88 | 1.32 | 1.22 | 0.76 | 0.75 | 0.74 | 0.73 |
| PCC | 0.5563 | 0.6248 | 0.6654 | 0.6974 | 0.5479 | 0.5876 | 0.7479 | 0.7497 | 0.7535 | 0.7569 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, L.; Jia, Z.; Zhang, G.; Zhang, G. Sparse Inversion of Gravity and Gravity Gradient Data Using a Greedy Cosine Similarity Search Algorithm. Remote Sens. 2025, 17, 2060. https://doi.org/10.3390/rs17122060
Xiong L, Jia Z, Zhang G, Zhang G. Sparse Inversion of Gravity and Gravity Gradient Data Using a Greedy Cosine Similarity Search Algorithm. Remote Sensing. 2025; 17(12):2060. https://doi.org/10.3390/rs17122060
Chicago/Turabian StyleXiong, Luofan, Zhengyuan Jia, Gang Zhang, and Guibin Zhang. 2025. "Sparse Inversion of Gravity and Gravity Gradient Data Using a Greedy Cosine Similarity Search Algorithm" Remote Sensing 17, no. 12: 2060. https://doi.org/10.3390/rs17122060
APA StyleXiong, L., Jia, Z., Zhang, G., & Zhang, G. (2025). Sparse Inversion of Gravity and Gravity Gradient Data Using a Greedy Cosine Similarity Search Algorithm. Remote Sensing, 17(12), 2060. https://doi.org/10.3390/rs17122060