
Design of Constant Modulus Radar Waveform for PSD Matching Based on MM Algorithm


Abstract
1. Introduction
- Based on the MM framework, a novel algorithm is proposed to obtain a CM waveform that matches an arbitrary PSD template. Compared with existing algorithms, the ERP of the proposed algorithm can be proved without the unitary requirements of the DFT matrix. Besides, the proposed algorithm can be proved to converge to the stationary point.
- Three acceleration schemes are developed to accelerate the convergence speed of the proposed algorithm. All the acceleration versions keep the ERP. Numerical results show that one of the acceleration schemes has better computational efficiency than the existing algorithms and is more robust to the initial points than existing algorithms.
- Because without the unitary requirements of DFT matrix, compared with existing algorithms, one of the proposed acceleration schemes shows the better matching performance when DFT matrix is not unitary and the code length is less than the number of frequency points. Besides, this difference becomes apparent for complex PSD shapes.
2. Materials and Methods
2.1. MM Method
2.2. MM-Based Matching Algorithm
2.3. Convergence Analysis
| Algorithm 1 MMA—MM-based Matching Algorithm |
|
2.4. Acceleration Schemes
| Algorithm 2 AMMA—Acceleration MMA |
|
| Algorithm 3 A-MMA-S—Accelerating MMA by SQUAREM and A-AMMA-S—Accelerating AMMA by SQUAREM |
|
2.5. Complexity Analysis and Implementation Platform
3. Results
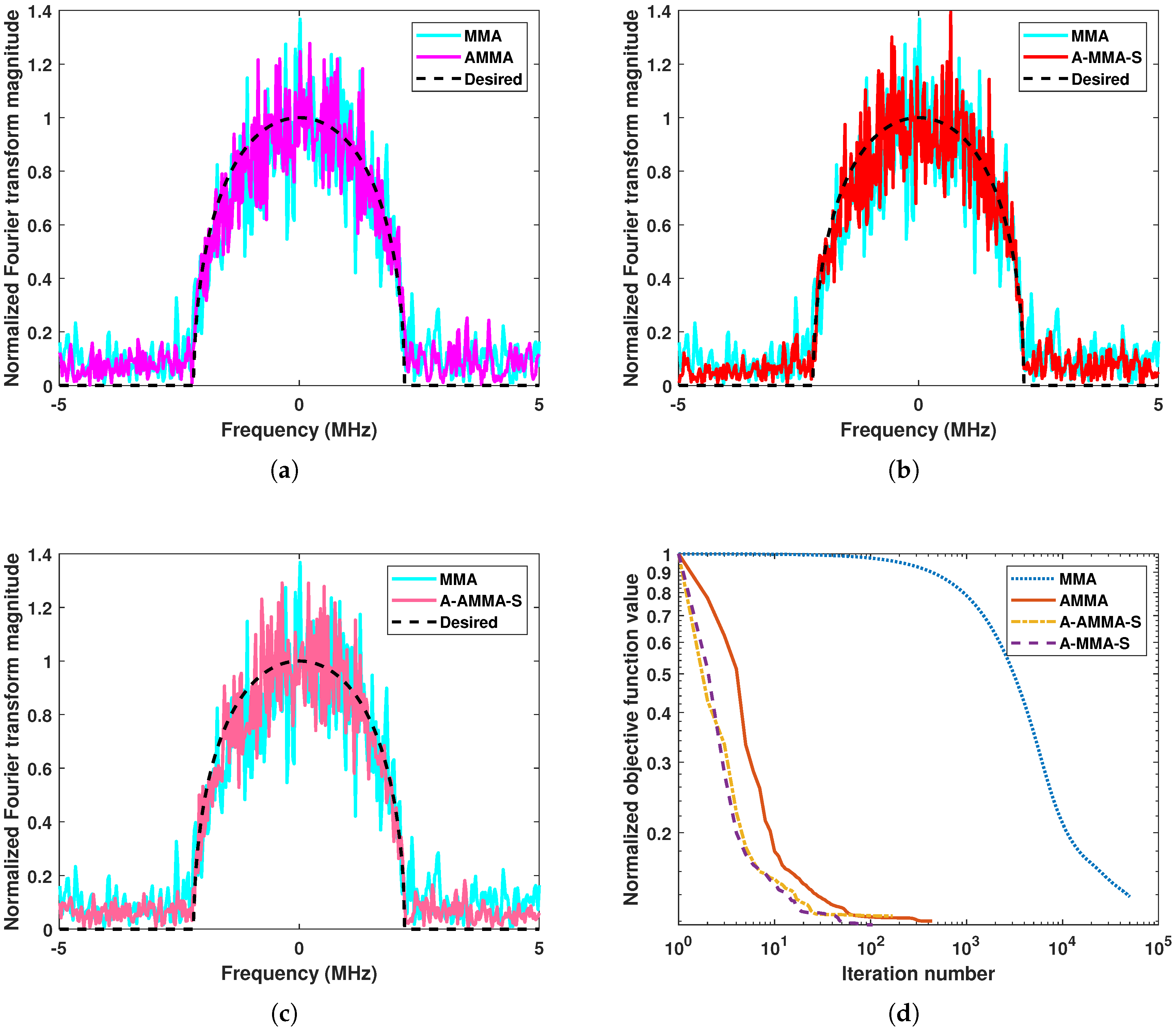
3.1. The Performance of Proposed Algorithms
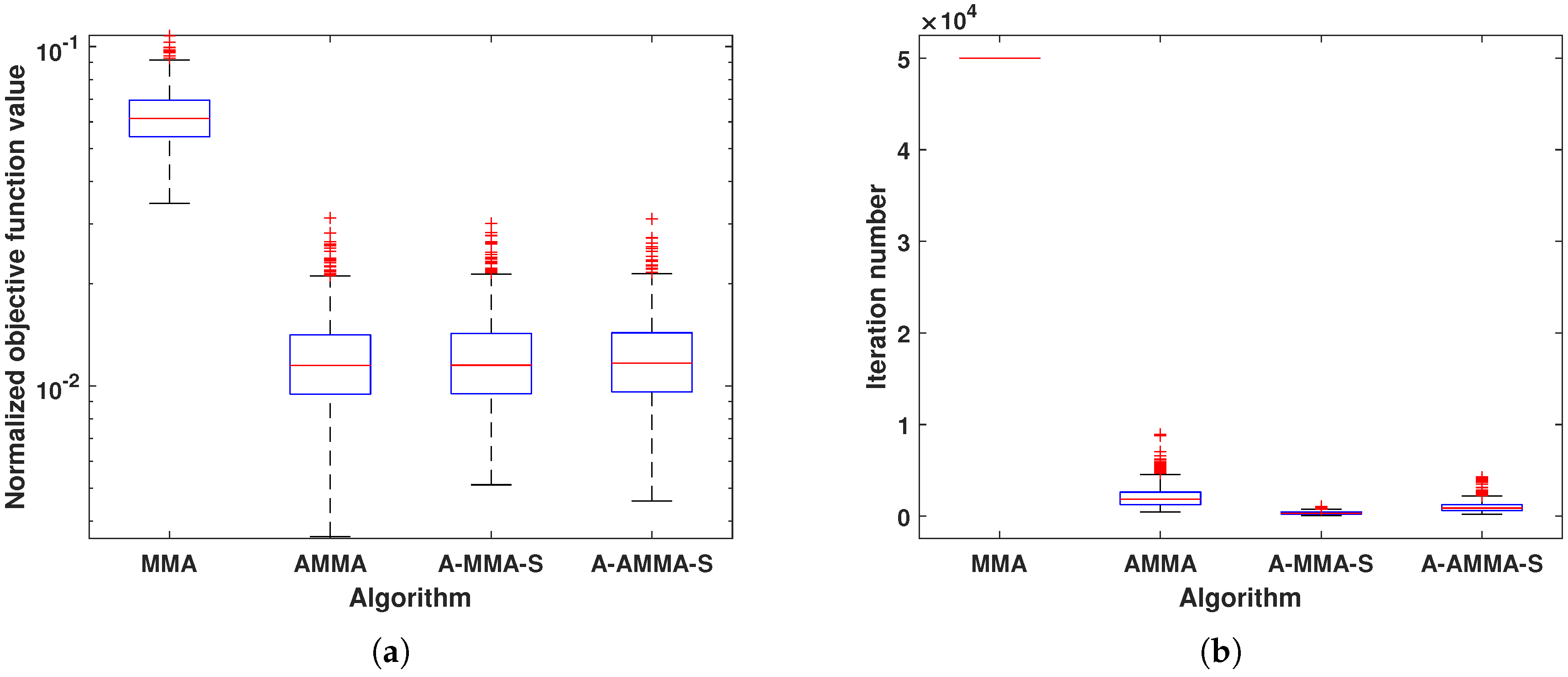
3.2. Algorithm Comparison
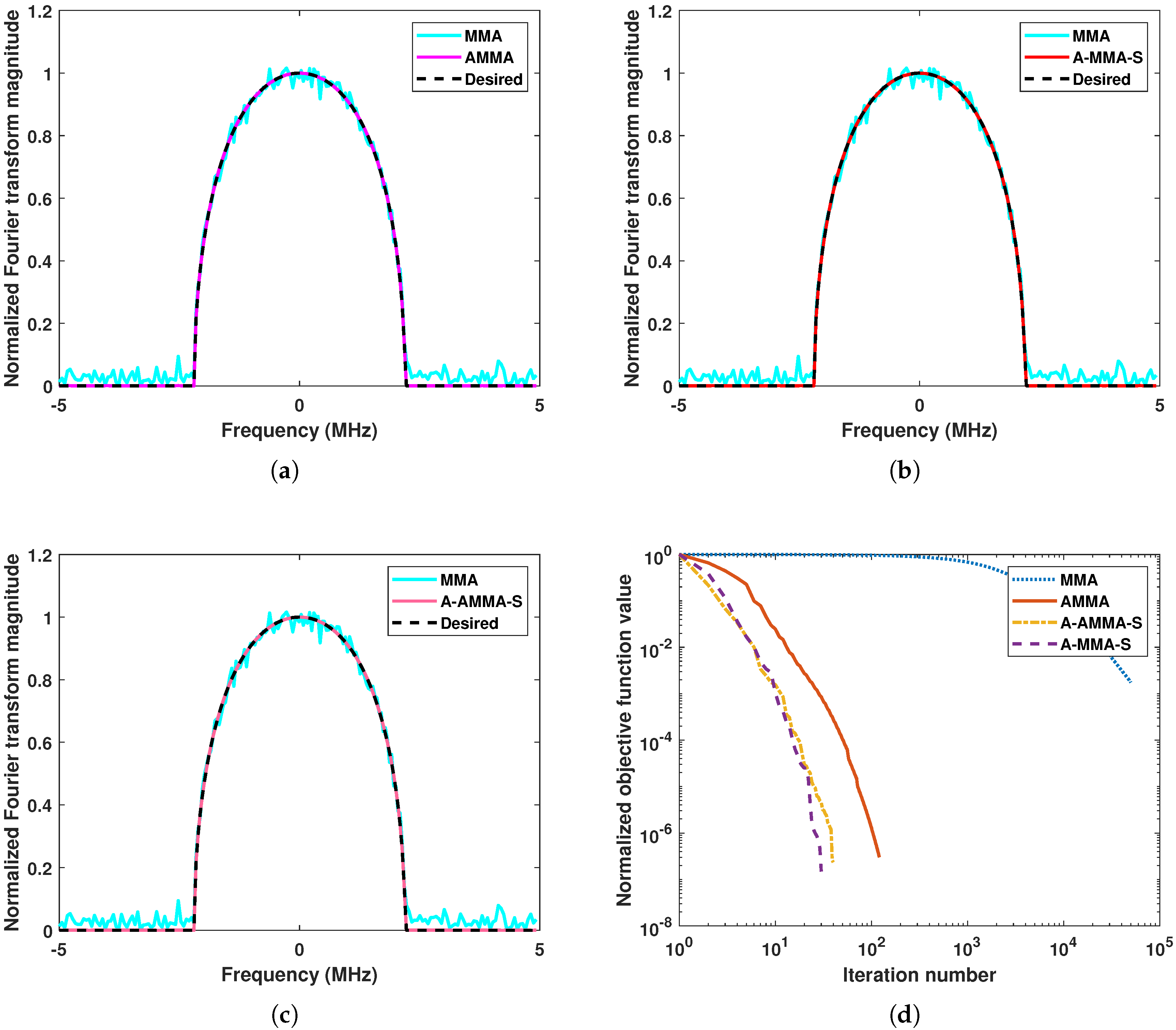
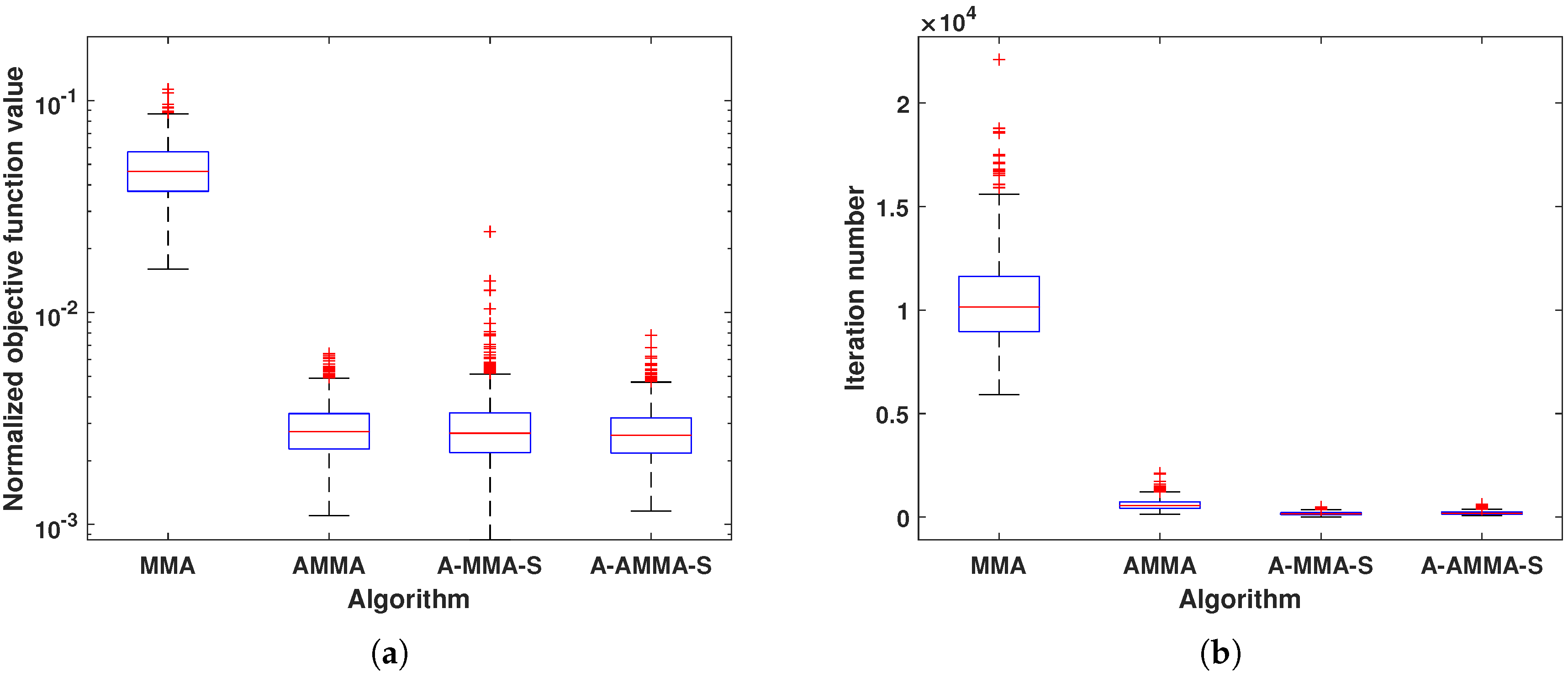
4. Discussion: Algorithm Performance Under Another PSD Template
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The Computation of ∇hω
Appendix B. Proof of Lemma 2
Appendix C. The Upperbound Derivations
Appendix D. The DFT Matrices Used in Simulations
References
- Li, K.; Jiu, B.; Liu, H. Game Theoretic Strategies Design for Monostatic Radar and Jammer Based on Mutual Information. IEEE Access 2019, 7, 72257–72266. [Google Scholar] [CrossRef]
- Song, X.; Willett, P.; Zhou, S.; Luh, P.B. The MIMO Radar and Jammer Games. IEEE Trans. Signal Process. 2012, 60, 687–699. [Google Scholar] [CrossRef]
- Lan, X.; Li, W.; Wang, X.; Yan, J.; Jiang, M. MIMO Radar and Target Stackelberg Game in the Presence of Clutter. IEEE Sens. J. 2015, 15, 6912–6920. [Google Scholar] [CrossRef]
- Xin, F.; Wang, Y.; Sun, J.; Huang, Y. Adaptable waveform design for radar and jammer for multi-target using game theoretic strategies. EURASIP J. Adv. Signal Process. 2022, 2022, 99. [Google Scholar] [CrossRef]
- Ding, W.; Zhang, W.; Zhang, M.; Wang, Q.; Shao, G.; Zhou, J. Networked radar waveform design for detecting extended target in the presence of jamming. Phys. Commun. 2025, 68, 102539. [Google Scholar] [CrossRef]
- Xu, Z.; Tang, B.; Ai, W.; Zhu, J. Relative entropy based jamming signal design against radar target detection. IEEE Trans. Signal Process. 2025, 73, 1200–1215. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Y. The monostatic radar and jammer games based on signal-to-jamming-plus-noise ratio. IEEE Access 2022, 10, 15023–15035. [Google Scholar] [CrossRef]
- Kay, S. Optimal Signal Design for Detection of Gaussian Point Targets in Stationary Gaussian Clutter/Reverberation. IEEE J. Sel. Top. Signal Process. 2007, 1, 31–41. [Google Scholar] [CrossRef]
- Zhu, Z.; Kay, S.; Raghavan, R.S. Locally Optimal Radar Waveform Design for Detecting Doubly Spread Targets in Colored Noise. IEEE Signal Process. Lett. 2018, 25, 833–837. [Google Scholar] [CrossRef]
- Zhu, Z.; Kay, S.; Raghavan, R.S. Information-Theoretic Optimal Radar Waveform Design. IEEE Signal Process. Lett. 2017, 24, 274–278. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, J.; Chen, Y. Constrained Pulse Radar Waveform Design Based on Optimization Theory. Sensors 2025, 25, 1203. [Google Scholar] [CrossRef] [PubMed]
- Xin, F.; Li, J.; Wang, Y.; Zhang, M. SINR-and MI-Based Double-Robust Waveform Design. Entropy 2022, 24, 1841. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Goodman, N.A.; Lee, C.K.; Yang, S. Improved waveform design for radar target classification. Electron. Lett. 2017, 53, 879–881. [Google Scholar] [CrossRef]
- Garren, D.A.; Odom, A.C.; Osborn, M.K.; Goldstein, J.S.; Pillai, S.U.; Guerci, J.R. Full-polarization matched-illumination for target detection and identification. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 824–837. [Google Scholar] [CrossRef]
- Garren, D.A.; Osborn, M.K.; Odom, A.C.; Goldstein, J.S.; Pillai, S.U.; Guerci, J.R. Enhanced target detection and identification via optimised radar transmission pulse shape. IEE Proc. Radar Sonar Navig. 2001, 148, 130–138. [Google Scholar] [CrossRef]
- Xin, F.; Wang, B.; Li, S.; Song, X.; Wang, C.H. Adaptive radar waveform design based on weighted MI and the difference of two mutual information metrics. Complexity 2021, 2021, 8947450. [Google Scholar] [CrossRef]
- Wu, Z.J.; Wang, C.X.; Li, Y.C.; Zhou, Z.Q. Extended target estimation and recognition based on multimodel approach and waveform diversity for cognitive radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5101014. [Google Scholar] [CrossRef]
- Alshirah, S.Z.; Gishkori, S.; Mulgrew, B. Optimal target classification using frequency-based radar waveform design. IEEE Trans. Geosci. Remote Sens. 2021, 60, 4703409. [Google Scholar] [CrossRef]
- Warnke, M.; Brüggenwirth, S. Waveform adaptation for target classification using hrrp in a cognitive framework. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 3695–3712. [Google Scholar] [CrossRef]
- Yu, R.; Luo, C.; Bai, M.; Yang, W.; Fu, Y. Waveform Design using Cauchy-Schwarz Divergence for Target Detection. IEEE Signal Process. Lett. 2025, 32, 1710–1714. [Google Scholar] [CrossRef]
- Idriss, Z.; Raj, R.G.; Narayanan, R.M. Waveform optimization for multistatic radar imaging using mutual information. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2410–2425. [Google Scholar] [CrossRef]
- Zhao, L.; Palomar, D.P. Maximin Joint Optimization of Transmitting Code and Receiving Filter in Radar and Communications. IEEE Trans. Signal Process. 2017, 65, 850–863. [Google Scholar] [CrossRef]
- Stoica, P.; Li, J.; Zhu, X. Waveform Synthesis for Diversity-Based Transmit Beampattern Design. IEEE Trans. Signal Process. 2008, 56, 2593–2598. [Google Scholar] [CrossRef]
- Yu, X.; Cui, G.; Yang, J.; Kong, L. Wideband MIMO radar beampattern shaping with space-frequency nulling. Signal Process. 2019, 160, 80–87. [Google Scholar] [CrossRef]
- Aldayel, O.; Monga, V.; Rangaswamy, M. Tractable Transmit MIMO Beampattern Design Under a Constant Modulus Constraint. IEEE Trans. Signal Process. 2017, 65, 2588–2599. [Google Scholar] [CrossRef]
- Zhao, Z.; Palomar, D.P. MIMO Transmit Beampattern Matching Under Waveform Constraints. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 3281–3285. [Google Scholar]
- Kassab, R.; Lesturgie, M.; Fiorina, J. Alternate projections technique for radar waveform design. In Proceedings of the 2009 International Radar Conference “Surveillance for a Safer World” (RADAR 2009), Bordeaux, France, 12–16 October 2009; pp. 1–4. [Google Scholar]
- Patton, L.K.; Bryant, C.A.; Himed, B. Radar-centric design of waveforms with disjoint spectral support. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 0269–0274. [Google Scholar] [CrossRef]
- Zhao, Y.N.; Li, F.C.; Zhang, T.; Zhou, Z.Q. Computational design of optimal waveforms for MIMO radar via multi-dimensional iterative spectral approximation. Multidimens. Syst. Signal Process. 2016, 27, 43–60. [Google Scholar] [CrossRef]
- Alaee-Kerahroodi, M.; Raei, E.; Kumar, S.; Rao, B.S.M.R. Coexistence of communications and cognitive MIMO radar: Waveform design and prototype. arXiv 2021, arXiv:2103.11890. [Google Scholar]
- Alaee-Kerahroodi, M.; Raei, E.; Kumar, S.; MRR, B.S. Cognitive radar waveform design and prototype for coexistence with communications. IEEE Sens. J. 2022, 22, 9787–9802. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Govoni, M.A.; Martino, L. On the design of multi-spectrally constrained constant modulus radar signals. IEEE Trans. Signal Process. 2020, 68, 2231–2243. [Google Scholar] [CrossRef]
- He, J.; Huang, W.; Cheng, Z.; Li, H.; Hea, Z. Joint Design of OFDM Sequences and Mismatch Filter under Spectral Constraints. In Proceedings of the 2023 IEEE Radar Conference (RadarConf23), Sydney, Australia, 6–10 November 2023; pp. 1–4. [Google Scholar]
- Pillai, S.U.; Li, K.Y.; Beyer, H. Reconstruction of constant envelope signals with given Fourier transform magnitude. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Patton, L.K.; Rigling, B.D. Phase Retrieval for Radar Waveform Optimization. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3287–3302. [Google Scholar] [CrossRef]
- Ying, S.; Babu, P.; Palomar, D.P. Majorization-Minimization Algorithms in Signal Processing, Communications, and Machine Learning. IEEE Trans. Signal Process. 2016, 65, 794–816. [Google Scholar]
- Hunter, D.R.; Lange, K. A tutorial on MM algorithms. Am. Stat. 2004, 58, 30–37. [Google Scholar] [CrossRef]
- Bertsekas, D. Nonlinear Programming; Athena Sci: Belmont, MA, USA, 1999. [Google Scholar]
- Razaviyayn, M.; Hong, M.; Luo, Z.Q. A Unified Convergence Analysis of Block Successive Minimization Methods for Nonsmooth Optimization. Siam J. Optim. 2012, 23, 1126–1153. [Google Scholar] [CrossRef]
- Varadhan, R.; Roland, C. Simple and Globally Convergent Methods for Accelerating the Convergence of Any EM Algorithm. Scand. J. Stat. 2010, 35, 335–353. [Google Scholar] [CrossRef]
- Wu, L.; Babu, P.; Palomar, D.P. Cognitive Radar-Based Sequence Design via SINR Maximization. IEEE Trans. Signal Process. 2017, 65, 779–793. [Google Scholar] [CrossRef]
- Song, J.; Babu, P.; Palomar, D.P. Sequence Design to Minimize the Weighted Integrated and Peak Sidelobe Levels. IEEE Trans. Signal Process. 2016, 64, 2051–2064. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , , , | -norm, -norm, Frobenius norm, and modulus |
| j | Imaginary unit |
| ⊗, ⊙ | Kronecker product and Hadamard product |
| Vectorization of matrix | |
| A diagonal matrix with its main diagonal filled with | |
| A column vector of the main diagonal elements of | |
| Element-wise exponential | |
| Element-wise modulus | |
| Element-wise inverse | |
| Element-wise inverse of modulus | |
| Element-wise imaginary part | |
| Largest element in vector | |
| n-dimensional real vector space | |
| n-dimensional complex vector space | |
| Base-2 logarithm | |
| Round toward positive infinity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, H.; Qiu, C.; Liang, C.; Yan, J. Design of Constant Modulus Radar Waveform for PSD Matching Based on MM Algorithm. Remote Sens. 2025, 17, 1937. https://doi.org/10.3390/rs17111937
Zheng H, Qiu C, Liang C, Yan J. Design of Constant Modulus Radar Waveform for PSD Matching Based on MM Algorithm. Remote Sensing. 2025; 17(11):1937. https://doi.org/10.3390/rs17111937
Chicago/Turabian StyleZheng, Hao, Chaojie Qiu, Chenyu Liang, and Junkun Yan. 2025. "Design of Constant Modulus Radar Waveform for PSD Matching Based on MM Algorithm" Remote Sensing 17, no. 11: 1937. https://doi.org/10.3390/rs17111937
APA StyleZheng, H., Qiu, C., Liang, C., & Yan, J. (2025). Design of Constant Modulus Radar Waveform for PSD Matching Based on MM Algorithm. Remote Sensing, 17(11), 1937. https://doi.org/10.3390/rs17111937