1. Introduction
Acoustic tomography (AT) is recognized for its capacity to capture simultaneous, spatially varying snapshots of temperature and velocity fluctuations. Originally conceived for applications in oceanography and seismology, its potential has been explored in the atmospheric boundary layer (ABL) for almost three decades. The pioneering 1994 study by Wilson and Thomson [
1] demonstrated AT’s feasibility in the ABL by reconstructing temperature and wind fields across a 200-square-meter (m
2) area with a horizontal resolution of 50 m.
Subsequent research in Germany during the late 1990s and early 2000s further established AT’s utility in the ABL, using an algebraic approach to solve the inverse problem [
2,
3,
4,
5,
6,
7,
8,
9]. These studies, which included extensive field testing near Leipzig and Lindenberg, demonstrated strong consistency between AT results and conventional point measurements. Highlighting the limitations of expensive remote sensing methods for the detailed analysis of turbulent structures in complex terrains and for validating large-eddy simulation (LES) models, Wilson et al. [
10] proposed a shift toward implementing a stochastic inversion (SI) algorithm in AT. AT relies on predefined correlation functions to model turbulence fields, avoiding the unrealistic assumption of non-correlation between grid cells used in algebraic approaches.
Building on these foundations, Vecherin et al. [
11] implemented the time-dependent stochastic inversion (TDSI) method, enhancing SI by integrating multiple temporal observations or data scans. In both Vecherin’s work and in this study, “data” specifically refers to acoustic travel-time measurements obtained from signal propagation between transducers. Instead of relying on a single set of observations for the reconstruction, TDSI uses multiple observations collected over different time periods. A numerical experiment was conducted, and the AT results were compared to “true” values. The findings indicated that the difference between the true and reconstructed temperature values was approximately 0.14 K, whereas the velocity values differed by only 0.03 m per second (m/s). Although the method showed promising accuracy, it was suggested that incorporating a more complex covariance function could yield even better results [
11]. This approach was further refined in field tests in Leipzig, leading to more accurate results compared to those obtained using algebraic methods [
12]. Subsequent expansions into three-dimensional reconstructions and reciprocal sound transmission have provided mixed results, prompting investigations into alternative reconstruction techniques, such as sparse reconstruction and the unscented Kalman filter approach [
13,
14,
15,
16,
17,
18]. A recent review by Othmani et al. [
19] provides a comprehensive overview of acoustic tomography applications and confirms that time-dependent stochastic inversion methods, particularly in outdoor atmospheric environments, remain underexplored.
In 2008, an AT array was constructed at the Boulder Atmospheric Observatory (BOA) in Colorado, utilizing the TDSI algorithm to effectively map turbulence fields [
20]. This array was later moved to the National Renewable Energy Laboratory (NREL) Flatirons Campus in 2017, with the system adapted for two-dimensional turbulence reconstruction [
21,
22]. The array was recommissioned at the Flatirons Campus in the summer of 2023 (see
Figure 1). The array consists of eight 10-meter towers spaced around an 80-meter-by-80-meter perimeter and contains a speaker and microphone at approximately 9 m above ground level. A Skystream 3.7 wind turbine is located near the center of the array footprint, providing a realistic obstacle in the flow and a future target for wake diagnostics. The experimental configuration at the Flatirons Campus serves as the conceptual basis for this study, which uses large-eddy simulation to explore and evaluate the performance of TDSI under controlled but representative conditions.
Despite significant progress in AT over recent decades, several key gaps remain in accurately reconstructing atmospheric turbulence using inversion algorithms such as TDSI. These include limitations in spatial resolution, sensitivity to measurement noise and model assumptions, and a lack of validation across varying atmospheric stability conditions. Early AT experiments were typically limited by sparse ray coverage, low spatial resolution, and assumptions of homogeneous Gaussian turbulence [
1,
2,
3,
23]. While TDSI has improved reconstruction quality [
11,
12], its sensitivity to measurement noise, covariance modeling choices, and atmospheric stability conditions has not been systematically quantified. Previous validations using large-eddy simulation (LES) were constrained to idealized cases and single snapshots [
11], without accounting for atmospheric stability.
While acoustic tomography offers several advantages for reconstructing spatially distributed velocity and temperature fields, the technique also faces important limitations. These include the common assumptions of spatial homogeneity and normally distributed, stationary fluctuations, which may not hold in complex boundary-layer flows or near wind turbines. Additionally, the spatial resolution is inherently limited by the assumed covariance length scale in the inversion algorithm, and the technique is highly sensitive to travel-time measurement accuracy. These limitations are particularly relevant for the time-dependent stochastic inversion (TDSI) method, which relies on Gaussian covariance functions and straight-line ray approximations. A more detailed discussion of these challenges is provided in Hamilton and Maric [
24], where future directions for relaxing these assumptions—such as the use of multiscale covariance models and nonhomogeneous background flows—are proposed. These inherent limitations motivate the present study’s sensitivity analysis and refinement of the TDSI algorithm.
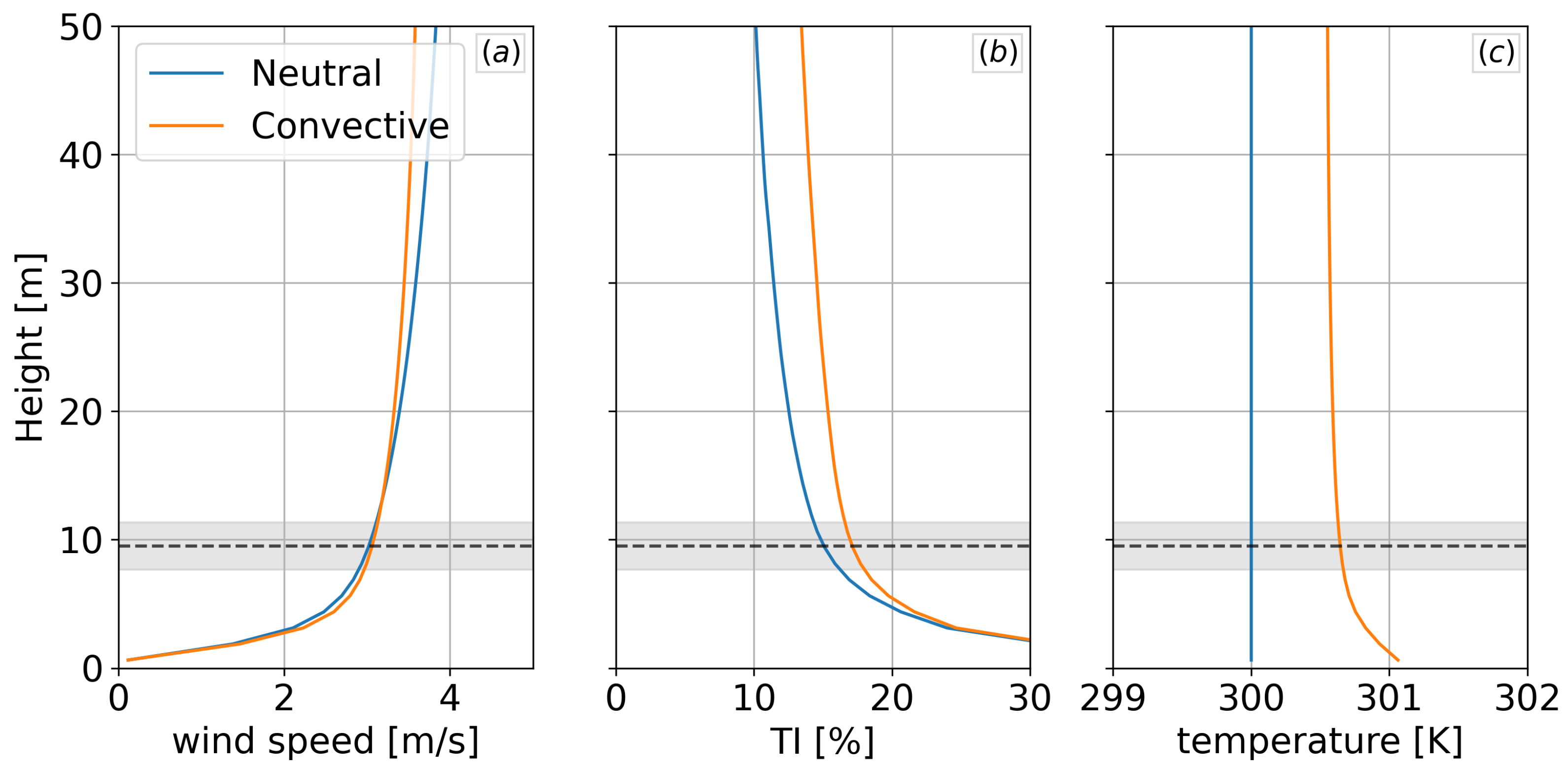
To systematically evaluate the performance and reliability of TDSI retrievals, we conducted two large-eddy simulations (LESs): one under near-neutral atmospheric conditions and the other under convective conditions. While the LES domain geometry resembles the eight-tower configuration of the NREL Flatirons Campus atmospheric tomography (AT) array, the simulations are not intended to exactly replicate the experimental facility. Moreover, this study does not use observational data from the physical AT array; instead, synthetic acoustic travel-time measurements derived from the LES fields are used. This synthetic approach allows travel-time data to be generated from known “true” atmospheric fields, enabling direct, quantitative evaluation of retrieval accuracy—something that is not possible using observational data alone. The LES framework thus serves as a ground-truth reference for systematically assessing TDSI performance across varying atmospheric stability regimes.
Leveraging this controlled LES environment, we address critical gaps in previous AT research. We quantitatively evaluate the sensitivity of TDSI reconstructions to travel-time measurement noise, covariance model parameters (standard deviations and length scales), and the number of integrated temporal observations. We identify the best-fit model parameters and determine the tolerance thresholds for parameter mismatch before retrievals become unreliable. Spectral analysis is used to establish a maximum spatial resolution of approximately 1.4 m, based on the behavior of the optimal data vector. Additionally, we quantify the retrieval tolerance to travel-time measurement error by introducing synthetic white noise. Together, these results inform critical areas for the future development of atmospheric AT technology, including strategies for improving measurement fidelity, optimizing array design (e.g., path density and 3D expansions), and connecting measured atmospheric statistics to inversion model parameters. This foundational work is a necessary precursor to applying AT in more complex, nonhomogeneous boundary layers such as those found in wind turbine wakes and industrial flows.
This paper is organized as follows.
Section 2 delves into the theory of TDSI.
Section 3 describes the details of the LES of the virtual AT array. The results of the field reconstructions are covered in
Section 4. The sensitivity study of the reconstruction algorithm is presented in
Section 5, and a summary and conclusions are presented in
Section 6.
2. Theory
The theory behind AT presented in this paper follows the work of Vecherin et al. [
11] and the format provided by Hamilton and Maric [
24]. Where applicable, standard formulations (e.g., travel-time integrals, least-squares estimates, and covariance-based inversion) are adapted directly from these sources and are referenced accordingly. The theory is based on the idea that the travel time (
) of an acoustic signal through the atmosphere depends only on the length of the path traversed in the direction of the
ith ray along the signal path (
i indexes each source–receiver pair),
, and the group velocity of the acoustic signal,
(adapted from Vecherin et al. [
11]):
Here,
is the adiabatic speed of sound, and
V is the wind velocity. This integral defines the acoustic travel time along a ray path, which depends on the spatial variation in sound speed and the wind component along the propagation direction. To approximate the turbulence fields within a tomographic area of interest, the speed of sound, temperature, and velocity components must be decomposed into their spatially averaged values and their corresponding fluctuations, as given by:
where
,
,
, and
are the spatially averaged components, and
,
,
, and
represent the fluctuating components at any time
t.
Because the fluctuating components are small, Equation (
1) can be linearized around a known background state, following the work of Vecherin et al. [
11]. The first-order linearization is represented by (adapted from Vecherin et al. [
11]):
Here,
is the angle between a travel path and the
x-axis, and
represents the truncation error. This is the linearized form of the travel-time equation under the assumption of small fluctuations. It allows estimation of the spatially averaged background fields from measured travel times using a least-squares approach. Now, the mean and fluctuating components can be approximated separately.
2.1. Mean Field Reconstruction
Based on Equation (
1), the mean fields (
,
,
, and
) can be reconstructed by neglecting the fluctuating components. Following the approach of Vecherin et al. [
11] and setting the fluctuating components in Equation (
3) to zero yields the simplified form:
In matrix notation, Equation (
4) can be expressed as follows [
11]:
Here,
G is an orientation matrix [
11]:
is a vector of known data
, and
is the unknown vector of mean fields with values
. The least-squares estimation of the overdetermined system is then given by [
11]:
from which the mean fields
,
,
, and
are estimated.
2.2. Fluctuating Field Reconstruction
To solve the inverse problem of estimating the fluctuating components
,
,
, and
in this study, the TDSI method is employed. In TDSI, the optimal stochastic inverse operator
must first be determined [
11]:
This equation represents the inverse problem central to TDSI: estimating the model state (temperature and velocity fluctuations) from travel-time data using an optimal mapping operator
. In this work, the term “model” refers to the set of unknown atmospheric state variables to be reconstructed—in this case, the temperature and wind velocity fluctuations within the tomographic domain. This terminology follows the standard inverse problem formulation, where a “model” represents the true but unknown quantity being estimated from observed data.
is a column vector containing all experimental measurements and is constructed using synthetic acoustic travel-time measurements derived from the LES output. These synthetic measurements are computed along virtual ray paths that reflect the geometry of the NREL AT array.
is a column vector of models describing the temperature and wind velocity fluctuations (
).
J represents the spatial points within the tomographic array at which the reconstructions are calculated, while
is the time at which the reconstructions are made. The optimal stochastic operator
is constructed from the model–data and data–data covariance matrices. This approach incorporates prior knowledge of the turbulence structure and measurement uncertainty, enabling robust estimation even in the presence of noise.
can be determined by [
11]:
and
represent the model–data and data–data cross-covariance matrices (adapted from Vecherin et al. [
11]):
Here,
N is the number of observations (temporal scans), and
is the time interval between those observations. A central scheme is implemented, in which
snapshots before
and
snapshots after
are combined.
represents the covariance between the models at some time
and the data at time
. Each column represents how the travel-time data at a given path
I are correlated with each model variable at every spatial location
J.
is the covariance between the data at time
and the data at time
.
The data vector at time
t takes the form (adapted from Vecherin et al. [
11]):
Here,
d contains
column vectors, which can be expressed using Equation (
3) in the following form (adapted from Vecherin et al. [
11]):
The estimates of
can be calculated using the following expressions (adapted from Vecherin et al. [
11]):
Here, the model space is described on
J points in the domain for each component
u,
v, and
T, leading to a total of
points.
is the path index, where
and
,
,
,
, and
are the spatial-temporal covariance functions.
The data–data covariance at time
and time
is given by (adapted from Vecherin et al. [
11]):
Here,
i and
p are the path indices, where
. It is assumed that
. Equations (
16) and (
17) can be further simplified if the fluctuating fields are assumed to be statistically stationary and if the covariances depend only on the temporal difference rather than on the times of interest,
and
(adapted from Vecherin et al. [
11]):
The turbulence fluctuations are considered “frozen” in time by applying Taylor’s hypothesis and therefore advect along with the mean flow. This consideration allows for the simplification of the covariances (adapted from Vecherin et al. [
11]):
The superscript “
S” implies a spatial covariance function. Now, the covariance functions in Equations (
16) and (
17) can be expressed in terms of known spatial covariance functions. This study follows the development by Vecherin et al. [
11], in which the covariances are assumed to follow a Gaussian distribution (adapted from Vecherin et al. [
11]):
Here,
,
, and
are the standard deviations of the turbulence fields;
,
, and
are the correlation lengths of the velocity and temperature; and the vectors
and
. For the present study, the standard deviations
,
, and
, and length scales
,
, and
are estimated based on the simulated LES travel-time observations, and parameter sweeps are performed to quantify the consequence of varying the values. The correlation functions in Equations (
20) through (
23) are then implemented into Equations (
16) and (
17) to obtain
and
. Finally, Equation (
9) is used to calculate the optimal stochastic operator
, which maps the measured acoustic travel times to the model in Equation (
8) and allows for the estimation of the fluctuating temperature and velocity fields.
4. Results
As described in
Section 2, the data vector
is typically estimated from observations and used to retrieve the temperature and velocity fields. To evaluate the accuracy of the reconstructed turbulence fields, the LES fields are utilized to reverse this process and determine an “optimal” data vector,
, representing the simulated fields:
This formulation defines as the best approximation of data that could be observed, given the model and its parameters used in the reconstruction algorithm. It represents a least-squares estimate of the data vector that best corresponds to the LES fields, given the forward operator .
A modified version of Equation (
8) is then applied to derive the models that describe the original turbulence fields:
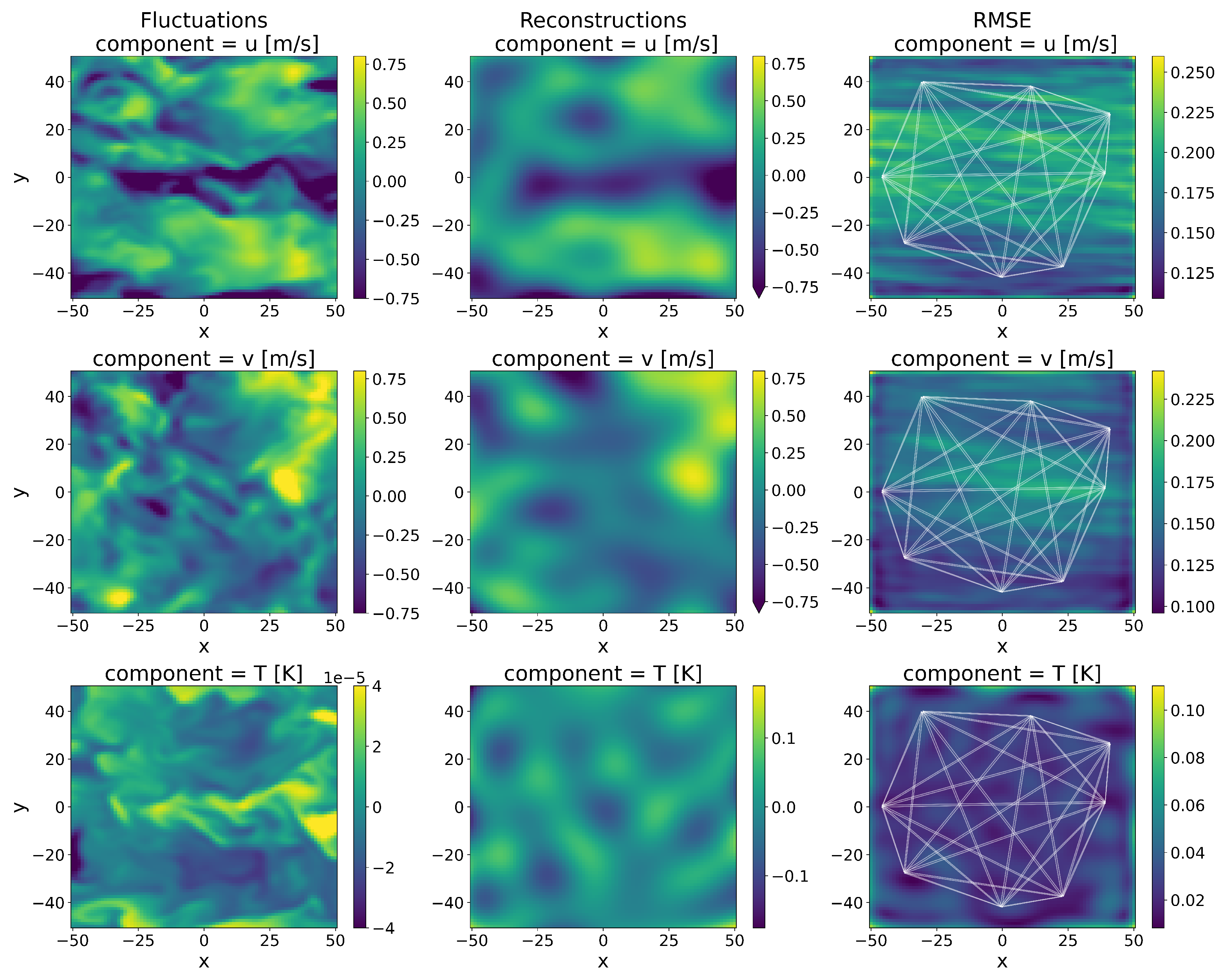
The reconstruction results at a single frame (time snapshot) of
t = 150 s for both the neutral and convective cases are illustrated in
Figure 7 and
Figure 8, respectively. The white lines in the figures denote the travel paths of the virtual acoustic signals within the AT array. The rightmost column represents the root mean square error (
) for the reconstructions, calculated as follows:
Here,
is the total number of time steps. The
quantifies the average magnitude of the reconstruction error across the time domain,
t, providing a measure of the mean deviation of the reconstructed values,
, from the true values,
. In both the neutral and convective cases, the TDSI algorithm successfully captured the large scales of the velocity components (
u and
v), with maximum
values of approximately 0.275 and 0.35 for
u and 0.25 and 0.3 for
v.
Although the reconstructions of
u and
v were relatively accurate in the neutral case, the reconstructions of
T were less so. This discrepancy primarily stemmed from the neutral nature of the examined case, which was characterized by negligible heat exchanges between the surface and the atmosphere. Any temperature variations that occurred were likely below the resolution threshold of TDSI. Additionally, it has been demonstrated that temperature exerts a significantly smaller influence on acoustic signal travel times compared to velocity fluctuations [
11], potentially compounding the challenges posed by limited array resolution and weak thermal contrasts in the neutral case.
In the convective case, the algorithm reconstructed the large scales well for both the velocity and temperature components. The approximate maximum
for
T was 0.12. Notably, the highest
values in this case were observed along the periphery of the AT array. This outcome was anticipated given that the density of travel paths within any given volume directly affects the quality of the reconstructions, since these paths are line integrals, as shown in
Section 2.
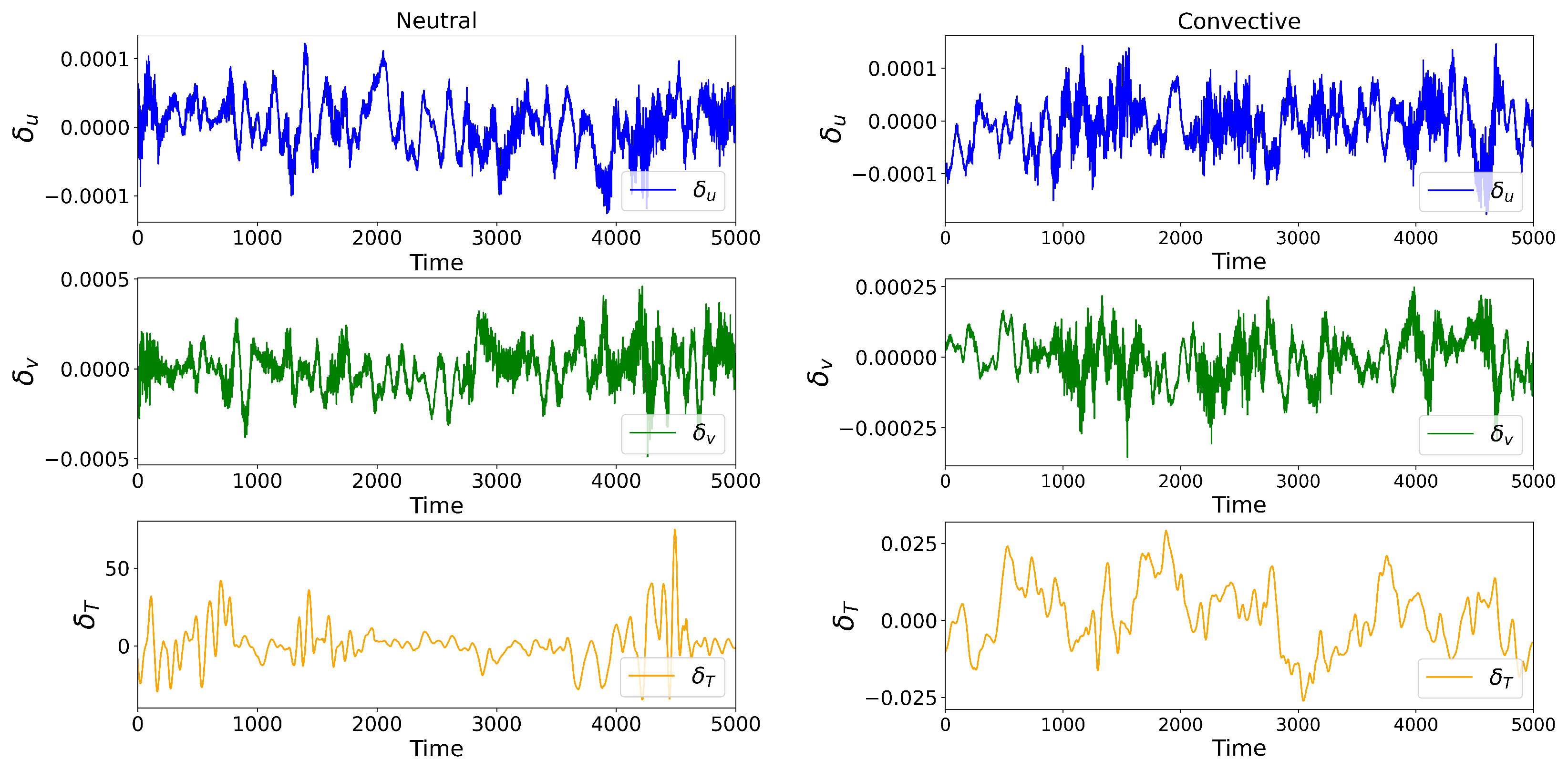
To assess the consistency of the reconstructions across all time steps, the spatial average of the normalized relative error (
) was computed for the turbulence components:
Here,
indicates a spatial average, and
. The results are shown in
Figure 9 for both the neutral and convective cases. In both cases,
and
were centered around zero and quite small, ranging from approximately
and
, respectively. This result indicates that the reconstructions were closely aligned with the LES fields and did not exhibit any systematic bias over time. As expected,
in the neutral case showed a much larger range in differences, indicating a significant discrepancy between the model and the LES. In the convective case, however,
was only
.
The histograms in
Figure 10 show the distribution of
for each component and stability condition. The green line represents the best-fit normal distribution. In the neutral case, the fitted normal distributions for the velocity and temperature components produced standard deviations of approximately
,
, and 13 for
u,
v, and
T, respectively. In the convective case, the corresponding standard deviations were approximately
,
, and
.
To assess the normality of the error distributions, a Kolmogorov–Smirnov () test was applied. The statistic quantifies the maximum difference between the empirical distribution of errors and the fitted normal distribution. In the neutral case, the velocity components ( and ) showed relatively small deviations from normality, with values of approximately 0.02 and 0.03, respectively. In contrast, in the neutral case deviated significantly from normality, displaying pronounced skewness and heavier tails.
In the convective case, closely followed a normal distribution, while and exhibited slight departures, again with values near 0.03. The improved normality of under convective conditions was consistent with stronger turbulent mixing, which tended to homogenize temperature fluctuations and produce more symmetric distributions. Conversely, in neutral stratification, the absence of buoyant forcing led to weaker turbulent transport and greater variability in temperature, resulting in a more skewed error distribution.
Overall, while minor deviations from normality were observed in some components, particularly for temperature under neutral conditions, these deviations were relatively small for the velocity components and were not expected to substantially impact the reliability of the TDSI reconstructions for velocity fields.
5. Sensitivity Study
The error in this study depends on several model parameters: (1) the number of temporal data scans or frames (
N) in the TDSI; (2) the model parameters, including the standard deviations (
,
, and
) and length scales (
and
) used in the covariance functions (see Equation (
20)); and (3) measurement noise (
). Note that the effects of the temperature length scale (
) are not included in this study, as temperature gradients have a smaller influence on the travel times and play a secondary role in the turbulence reconstructions [
12]. Given these parameters, the error is modeled as
.
The algorithm’s sensitivity to those parameters was evaluated in the following terms:
Understanding the sensitivity of the algorithm to these parameters is critical for optimizing the reconstruction process and ensuring robust performance under varying atmospheric conditions. Most importantly, this approach helps determine the limits of the resolvable scales and the measurement resolution achievable by the algorithm.
5.1. Temporal Data Scans
The number of additional temporal data scans considered in the reconstruction,
N, as discussed in
Section 2, plays a critical role in estimating the model–data
and data–data
covariance matrices. The amount of information contained in the covariance matrices scales with
N. In this study, the influence of
N was assessed over a range from 0 to 15. Due to increasing computational demands, 15 was selected as the upper limit. For each reconstruction, the normalized
error was calculated as follows:
This equation quantifies the average error for each
N across all snapshots in time for the
u,
v, and
T components. The error is normalized by the fluctuation span
. This equation provides a measure of the significance of the error relative to the variability in the data.
The results for both the neutral and convective cases are presented in
Figure 11. The shaded regions indicate one standard deviation.
The error was similar for both the neutral and convective cases, suggesting that the algorithm resolved them well and that its performance was not significantly influenced by atmospheric conditions. In both cases, the error for u and v decreased significantly between and and then plateaued, although the decrease in v was non-monotonic. In the neutral case, the error increased for T, as expected, due to the negligible heat exchange between the surface and the atmosphere. For convective conditions, the error in T followed the trend of the velocity components but began to increase past . Across both cases, the T reconstructions showed higher errors and greater variability compared to u and v, highlighting the additional challenges of reconstructing thermal fluctuations in turbulent flows.
Figure 12 and
Figure 13 show the time series of the normalized relative error (
) for the neutral and convective cases, as computed in Equation (
27). Red hues indicate lower
N values, whereas blue hues represent higher
N. As shown, the time evolution in both cases demonstrates that the error showed minimal improvement beyond
. Although higher values of
N occasionally produced marginally lower error values,
was selected as an optimal balance between the reconstruction performance and computational efficiency. The velocity components in both cases converged consistently, whereas those for
T did not. Additionally, the error for
T exhibited persistent oscillations and variability over time. As a result, reconstruction errors for all components in the convective case were consistently higher.
The power spectral density (PSD) was computed to analyze the frequency content of the reconstructed velocity fields and compare them to the LES reference spectra (see
Figure 14). The PSD of the reconstructions and LES for each
N was calculated using Welch’s method with a Hanning window and segment length spanning the entirety of the signal. The grayscale curves correspond to reconstructions using increasing values of
N (from 0 to 15), with lighter shades representing higher
N. The black line represents the PSD computed directly from the LES velocity field and serves as a benchmark. At higher frequencies, the reconstructions tended to deviate more from the LES, while at lower frequencies, the reconstructions aligned more closely with the LES. This suggests that the algorithm was able to reconstruct larger-scale, lower-frequency structures more accurately. As
N increased, the spectra for the reconstructions showed better agreement with the LES at mid and lower frequencies, indicating that increasing the number of temporal frames helped capture more of the flow’s dynamics. Beyond
, the reconstructions did not improve significantly with increasing
N. Based on the above analysis, the optimal value of
N is 4 or higher. Regardless of the value of
N, the reconstructions could not resolve spectral content beyond a frequency of approximately 0.15 Hz, corresponding to a spatial resolution limit of about 1.4 m. While the LES had a nominal grid resolution of 1.25 m, its spectra may appear to extend beyond this limit due to interpolation or smoothing effects. However, these high-frequency components were not reliably resolved by the TDSI algorithm and were outside its effective resolution range.
5.2. Model Parameters
The standard deviations (
,
, and
) and length scales (
and
) play a significant role in the covariance function assumptions of the algorithm, as shown in Equation (
23). In this study, these parameters were derived from the LES. For neutral conditions, the parameters were set to
= 0.38,
= 0.27,
, and
=
= 18 m (see
Section 3). In the convective case, the values were
= 0.47,
= 0.38,
= 0.1, and
=
= 24.8 m. For the sensitivity analysis, the
values were varied from 0 to 1 in increments of 0.05. Although the assumed standard deviations in the covariance functions may differ from those in the LES, this analysis aims to evaluate how sensitive the TDSI reconstructions are to such mismatches. In real-world applications, exact prior statistics are rarely known, and this sensitivity analysis provides insight into the robustness of the algorithm under uncertainty. The results for both the neutral and convective conditions are shown in
Figure 15, with the LES-derived values indicated by vertical dashed lines.
For , the error in the reconstructions of u decreased rapidly before leveling off at approximately in the neutral case and in the convective case. This behavior suggests that values greater than 0.05 captured the dominant scales of turbulence and adequately represented the variability in the turbulence field, such that further increases did not significantly impact the reconstruction quality of u in both stability regimes. The optimal values determined by the LES ( for the neutral case, and for the convective case) fell within this expected range. Interestingly, the values had a minimal impact on the reconstruction of the v velocity fields. This outcome may be due to the fact that the ray travel paths were more sensitive to fluctuations in the streamwise velocity (u), which directly affected propagation along the travel paths. Additionally, when the spanwise velocity component (v) was smaller in magnitude than u, the reconstruction became less sensitive to the turbulence covariance structure in the field. This trend was reversed for the case of . This behavior shows that and directly affected their respective velocity components while having minimal cross-sensitivity. This suggests that while the reconstructed fields of u, v, and T were coupled, each component was most sensitive to its corresponding model parameter.
For the temperature component (T), a similar trend was observed in the neutral case for both and . For varying values of and , the error decreased as increased, following a downward trend until reached approximately 0.4, where it flattened out. This result suggests that at lower , the algorithm underestimated the variability in T, likely due to minimal heat exchange between the surface and atmosphere under neutral conditions. In contrast, the reconstruction of T in the convective case was less sensitive to . In this case, the error for T appeared unsteady, but the variations were relatively small, with a magnitude change of only about 0.01. The overall magnitude of was, however, larger in the convective case than in the neutral case. This result was likely due to the convective boundary layer being driven by buoyancy, which induced stronger temperature fluctuations that are more difficult to capture using a simple Gaussian covariance model. In the convective case, the reconstruction error in T varied by approximately 1. The error decreased to a minimum around before rising steadily. Although the variation was relatively small, this trend suggests that larger values of may overestimate the variability in v. This overestimation could have smoothed out smaller-scale structures, thereby introducing errors in the T reconstruction.
As expected, the velocity components exhibited little sensitivity to in both the neutral and convective cases. In the neutral case, where buoyancy forcing was negligible, the error was small for near-zero values of but rose rapidly to a consistently large value as increased. In the convective case, however, the algorithm reconstructed the temperature fluctuations with high accuracy. The error decreased around and remained consistently small thereafter. This result indicates that, at this point, the reconstructions had successfully captured the dominant temperature structures. The acoustic travel-time data were primarily sensitive to large-scale features in the turbulence field. Once these features were well represented by the covariance model, further increases in did not improve the reconstructions.
To study the sensitivity to varying length scales of the reconstructions of the turbulence fields, a similar analysis was conducted. The
error was computed for
and
, ranging from 10 m to approximately 30 m. The results for the neutral and convective conditions are shown in
Figure 16 and
Figure 17, respectively.
For both the neutral and convective conditions, the error ranged from approximately 1.5 to 3, which was lower than the errors observed for varying standard deviations, indicating that the reconstructions were less sensitive to the chosen length scales. Notably, the error trends were consistent with those observed in the standard deviation sensitivity analysis, in that changes in and primarily affected their respective velocity components with minimal cross-sensitivity. Although the chosen and values derived from the LES did not align with the minimum error, the consistently low errors and the overlap of the one-standard-deviation bands near the chosen length scales suggest that the LES-derived length scales were justified.
5.3. Measurement Noise
To assess the impact of random measurement error on the reconstruction algorithm, white noise (
) was added to the optimal data vector
. White noise has a constant PSD and effectively simulates random signals representative of measurement error. In this study, normally distributed random noise with standard deviations ranging from
to
was used to perturb
. Considering the average range of
(
to
) observed in the study, the chosen noise range tested the algorithm’s performance under both minimal noise conditions and large perturbations exceeding the magnitude of
. The
error between the noisy reconstructed fields and the LES fields was computed to evaluate the robustness of the algorithm under these conditions for both the neutral and convective cases. The results are shown in
Figure 18.
For the neutral conditions, the error remained relatively constant and low at noise levels under , demonstrating that the algorithm effectively handled low-level noise without much loss in reconstruction accuracy. At approximately , an increase in the error was observed for all turbulence components, suggesting a critical threshold of noise beyond which the algorithm failed to maintain accuracy. To determine the measurement-error tolerance associated with white noise for , fast Fourier transforms (FFTs) were applied to randomly generated Gaussian noise signals, and their peak frequencies were determined. Sufficient iterations were performed until the peak frequency consistently converged to a value of 500 Hz. This analysis indicated that the tolerance for measurement error under neutral conditions corresponded to a travel-time uncertainty of less than 0.002 s.
Under convective conditions, the error was significantly higher overall than that observed under neutral conditions. This outcome was likely due to the complexity of the nonlinear dynamics associated with convective atmospheric boundary layers, which can amplify error propagation when noise is introduced. The error began to increase at for all turbulence components, although the error for the reconstructions of u was lower than that for v and T. Additionally, temperature fields in convective conditions exhibited larger-scale turbulent structures, making them easier to reconstruct compared to smaller-scale variations in v. At , an increase in measurement error was observed. A similar analysis to that conducted for neutral conditions was performed, yielding a travel-time uncertainty of 0.002 s, identical to the neutral case.
These results define two operational limits of the TDSI algorithm under the conditions tested. First, based on deviations in the power spectral density (PSD), the maximum spatial resolution is approximately 1.4 m, corresponding to a frequency cutoff of 0.15 Hz. Second, the addition of synthetic white noise revealed a measurement-error tolerance threshold of approximately 0.002 s in travel-time data. Beyond this level, reconstruction accuracy degrades significantly. These thresholds provide quantitative guidance for experimental system design and data quality requirements.
6. Summary and Conclusions
This study systematically evaluated the performance and reliability of the time-dependent stochastic inversion (TDSI) algorithm for acoustic tomography (AT) under controlled neutral and convective boundary-layer conditions. Synthetic acoustic travel-time measurements were derived from LES fields, providing a ground-truth atmospheric state to enable direct, quantitative assessment of the TDSI algorithm. While no observational data were used in this work, the LES setup was carefully designed to reflect the geometry and typical meteorological conditions of the experimental AT array at the National Renewable Energy Laboratory’s Flatirons Campus. This modeling approach allows for rigorous testing of retrieval performance in a controlled environment—something that is not feasible using field data alone.
The reconstructions demonstrated good agreement with the LES reference fields for velocity fluctuations in both stability regimes. Temperature reconstructions were more sensitive to stratification, particularly under neutral conditions, where buoyant forcing is weak. In contrast, the greater uniformity of convective boundary layers facilitated more accurate predictions and reconstructions of temperature fields. However, these differences should not be regarded as the primary focus; instead, the key contributions of this work lie in quantitatively characterizing the algorithm’s sensitivity and operational limits.
A detailed sensitivity analysis was conducted to assess the effects of key model parameters (N, , and ) and travel-time measurement noise () on the quality of the turbulence reconstructions. The results demonstrated that increasing the number of integrated temporal observations (N) significantly improved reconstruction accuracy, with diminishing returns beyond approximately . Consequently, was selected to balance accuracy and computational cost.
Spectral analysis of the reconstructions identified a maximum spatial resolution limit of approximately 1.4 m, corresponding to deviations from the LES benchmark spectrum at around 0.15 Hz. The study also confirmed that deriving covariance model parameters ( and ) from LES fields is a reasonable strategy for initializing TDSI inversions, with sensitivity primarily to standard deviation values rather than length scales.
Importantly, introducing synthetic white noise into the optimal data vector established a measurement-error tolerance threshold of less than 0.002 s for reliable reconstructions across both neutral and convective conditions. This result underscores the critical importance of accurate travel-time measurements in achieving high-fidelity retrievals.
The findings of this study provide critical insights for the continued development of atmospheric acoustic tomography. They offer guidelines for selecting TDSI inversion parameters, highlight the resolution limits of current array designs, and suggest strategies for improving retrieval fidelity through enhanced travel-time measurement accuracy and array densification. While this study focused on horizontally homogeneous boundary layers, the framework developed here lays the groundwork for future extensions to more complex, nonhomogeneous flows, such as wind turbine wakes and industrial environments.
Future extensions of the AT system are envisioned to include vertically oriented arrays spanning utility-scale turbine rotor heights, enabling volumetric flow characterization in turbine wakes (see Hamilton and Maric [
24] for a full explanation). Comparisons between AT retrievals and Doppler LiDAR measurements have been suggested as a way to further validate and expand the capabilities of acoustic tomography. While this study focused solely on synthetic acoustic data, Doppler LiDAR has also been used to retrieve turbulence characteristics such as dissipation rates [
30]. A potential future direction is to compare AT and LiDAR-based methods to assess their relative strengths in reconstructing turbulence under various stability regimes and flow conditions. This foundational work supports future applications of AT to wind turbine wake diagnostics. A follow-on modeling study, leveraging the LES of a turbine wake and the NREL 3D AT array, is currently underway.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}