




A Fast and Efficient Denoising and Surface Reflectance Retrieval Method for ZY1-02D Hyperspectral Data


Abstract
1. Introduction
2. Methodology
2.1. HSI Denoising
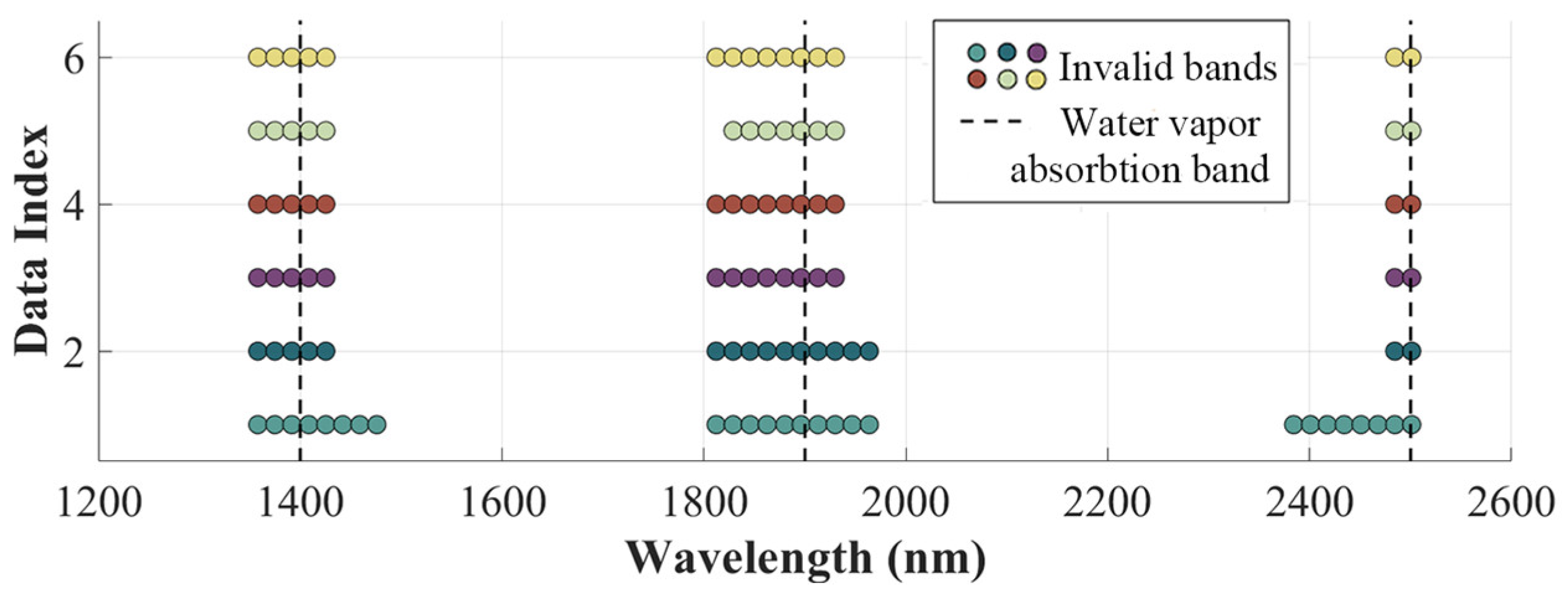
2.1.1. Invalid Band Removal
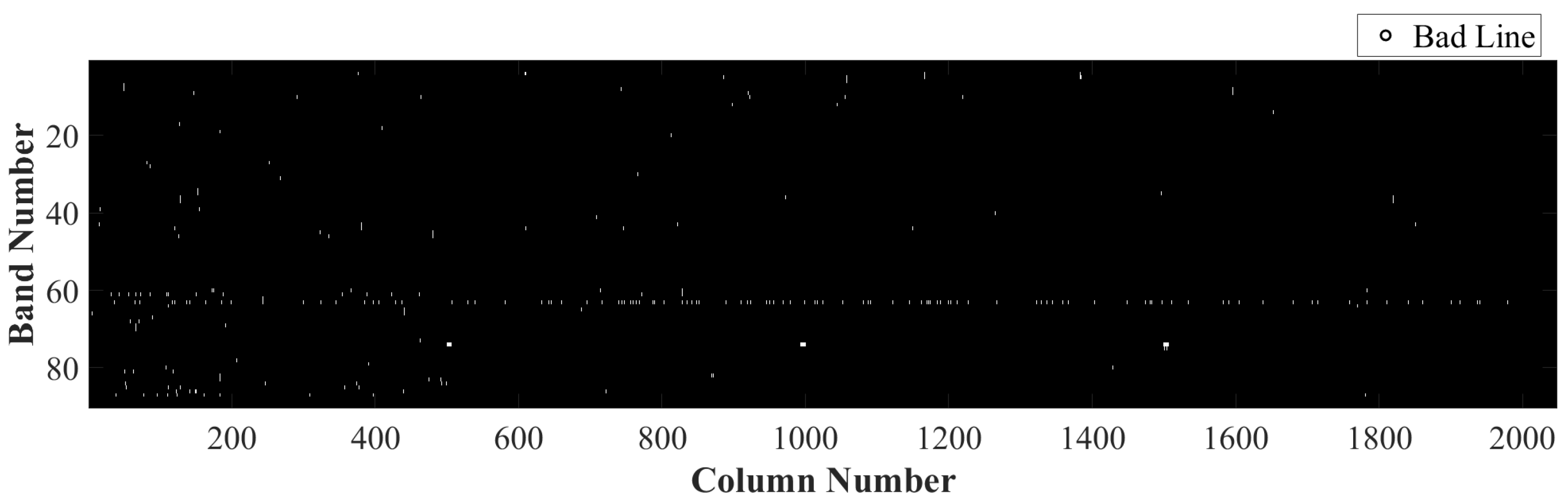
2.1.2. Bad Line Noise Repairing
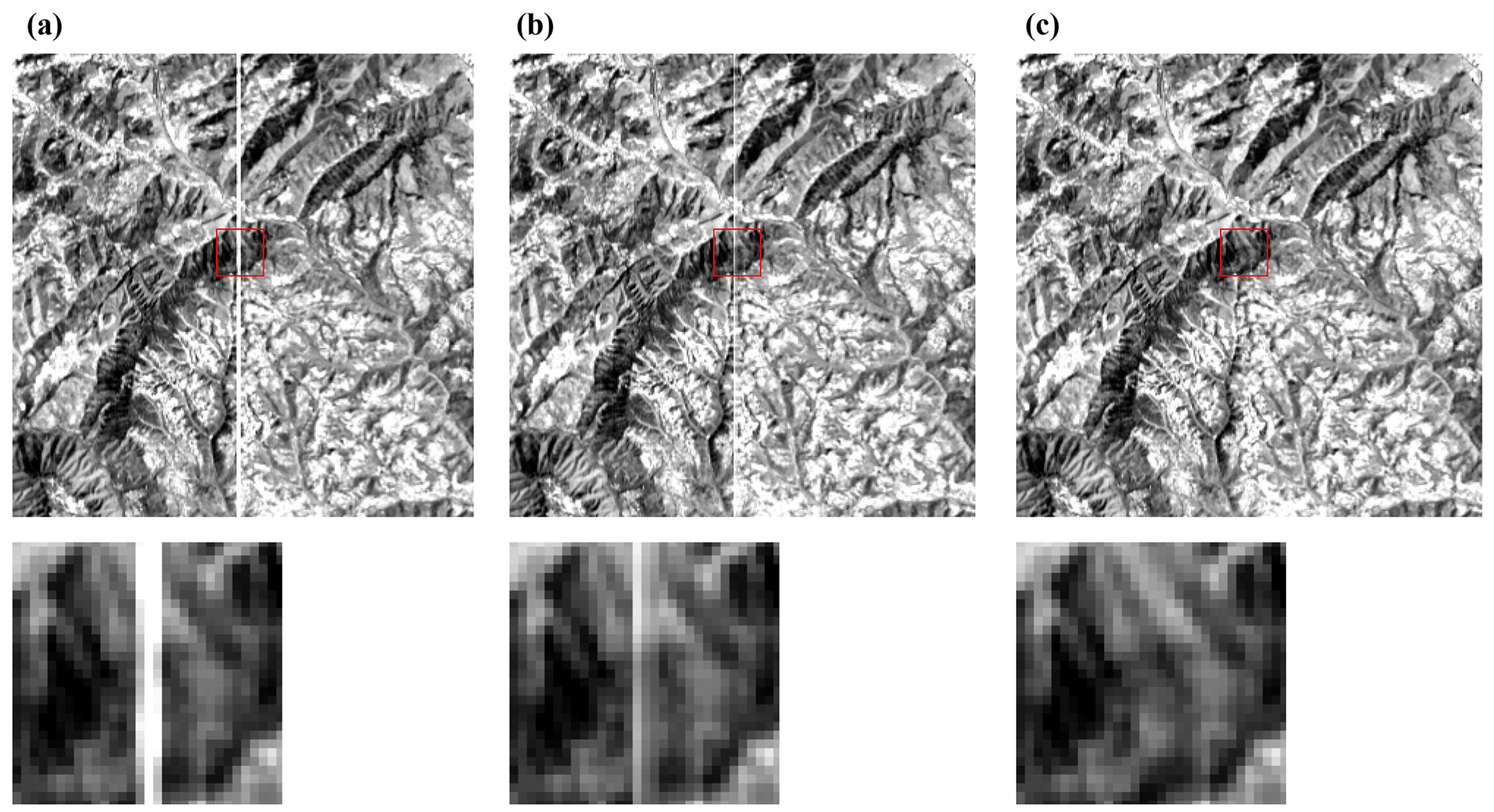
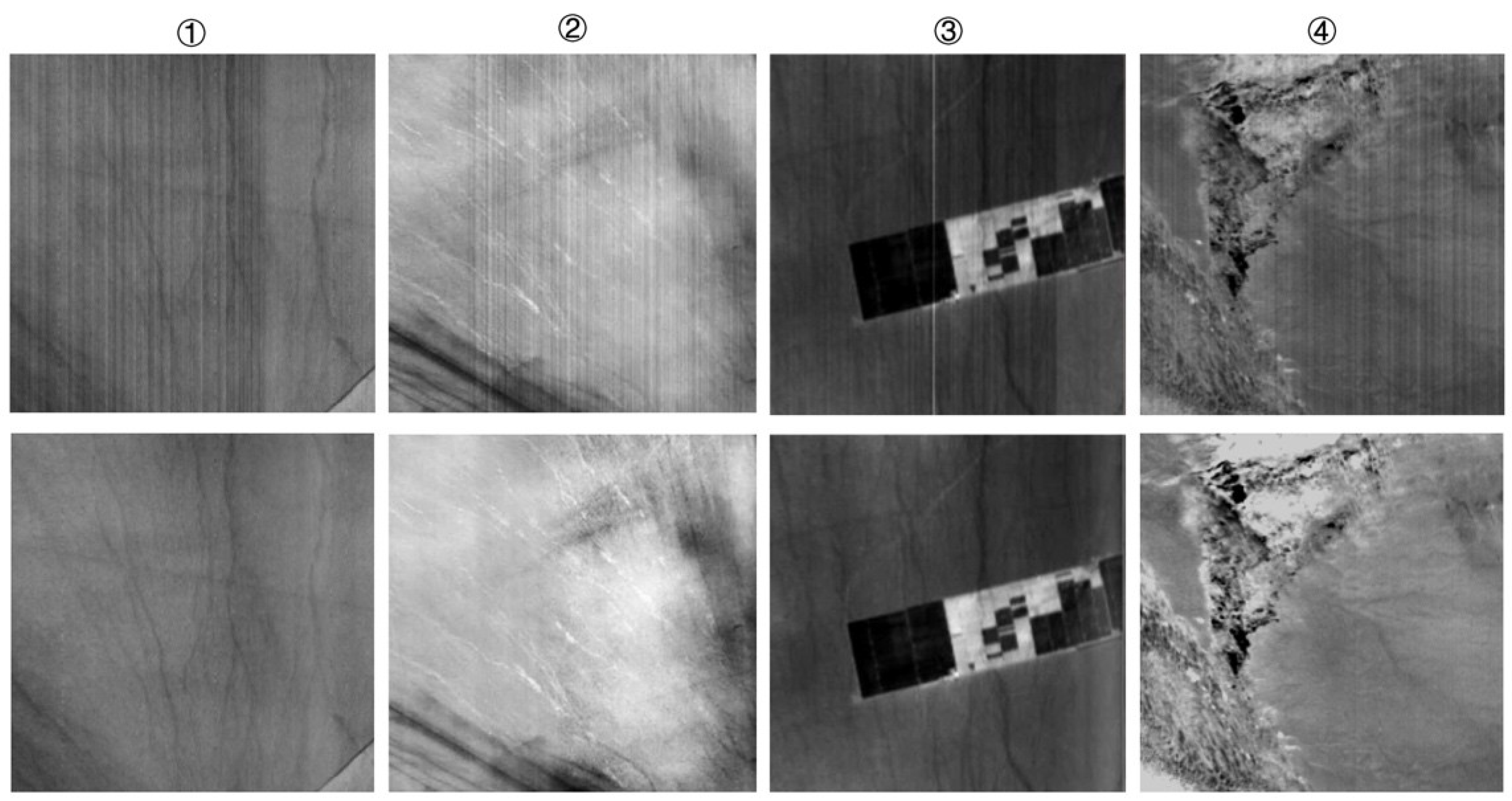
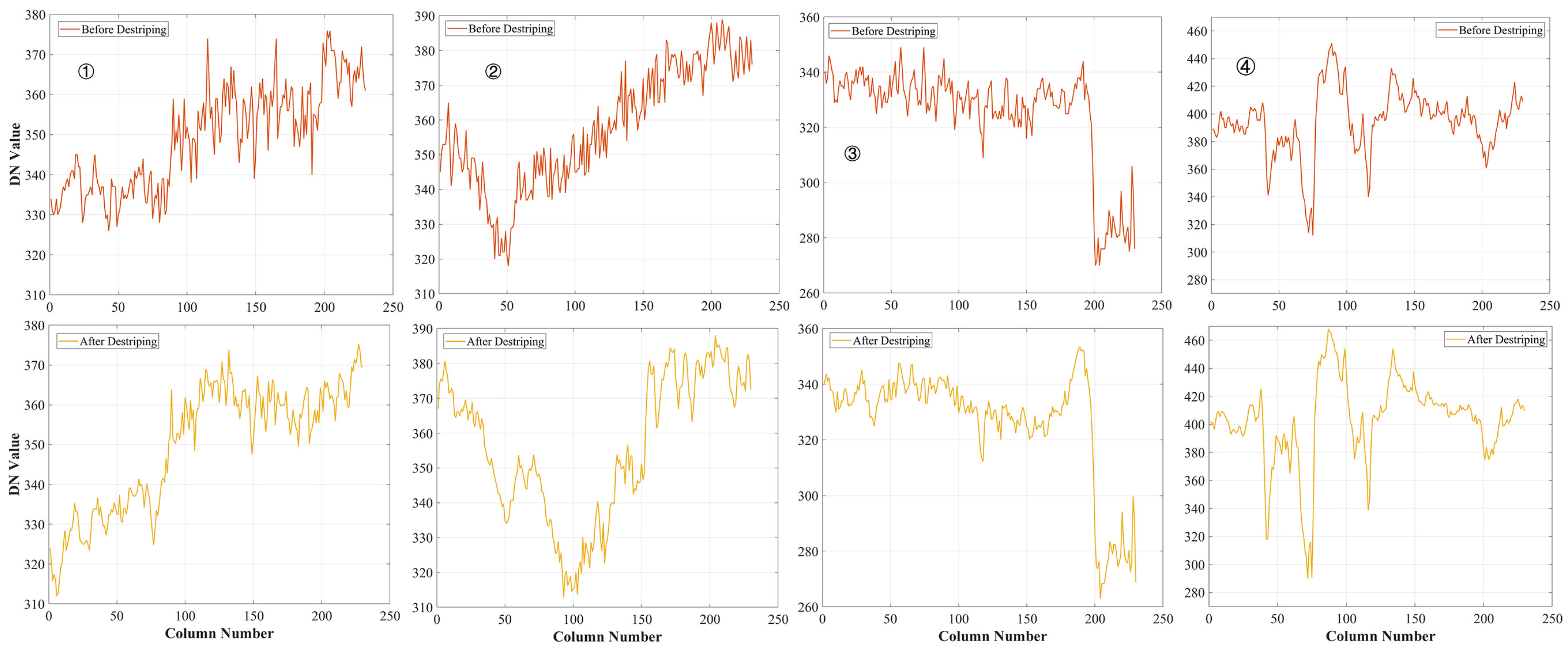
2.1.3. Strip Noise Correction
2.2. Reflectance Retrieval
2.2.1. Radiometric Calibration
2.2.2. Atmospheric Correction
2.3. Accuracy Evaluation
2.3.1. Quantitative Evaluation Metrics for Denoising Quality
- 1.
- Average gradient value (AGV)
- 2.
- Average edge strength (AES)
- 3.
- Information entropy
- 4.
- Signal-to-noise ratio (SNR)
2.3.2. Quantitative Evaluation Metrics for SR
3. Experimental Result and Analysis
3.1. Data
3.2. Experimental Results
3.2.1. HSI Denoising Results
3.2.2. Reflectance Retrieval Result
3.3. Denoising Quality Evaluation Results
4. Discussion
4.1. Validation with MODIS SR Product
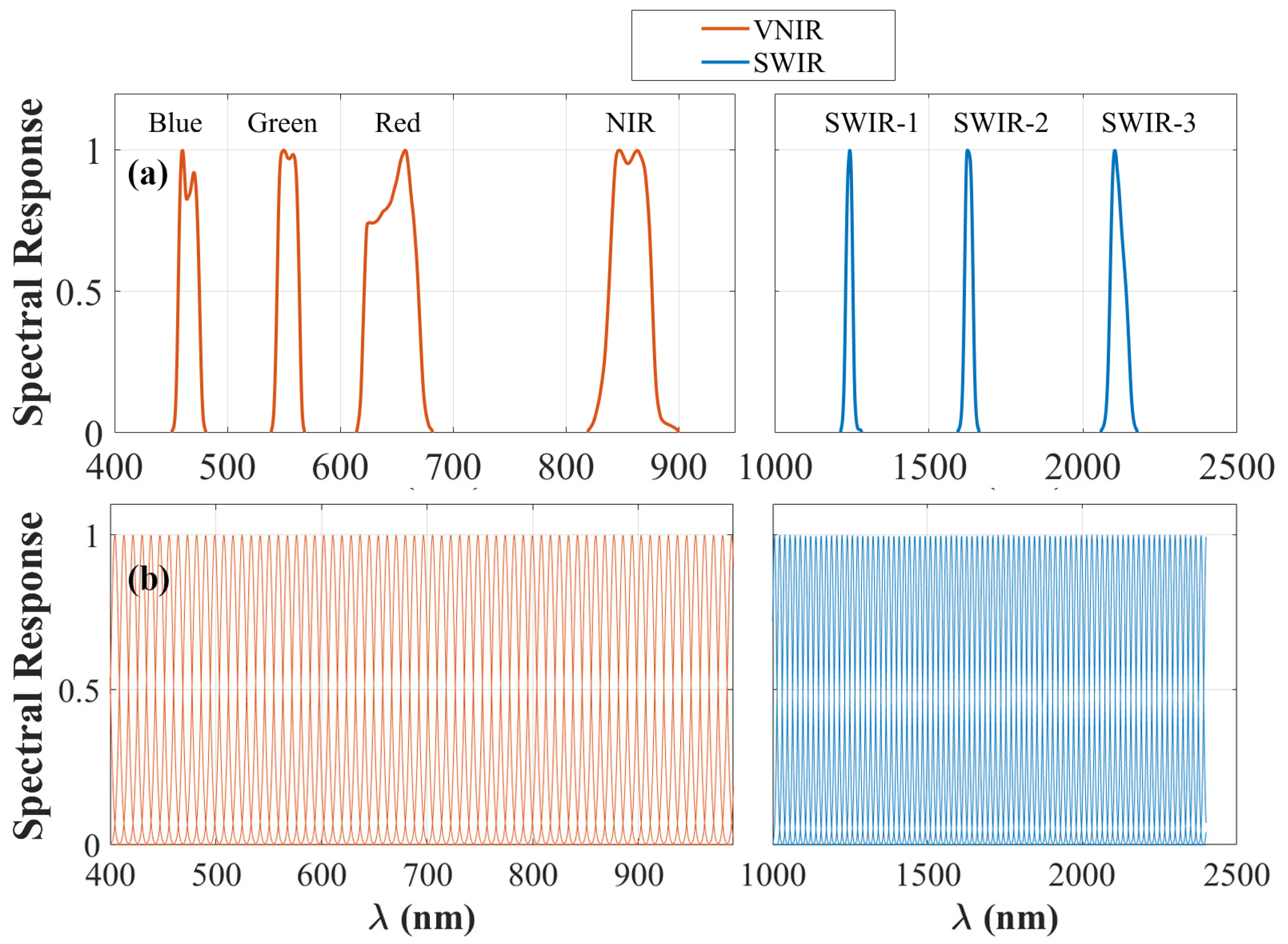
4.1.1. Spectral Matching
4.1.2. Sample Selection
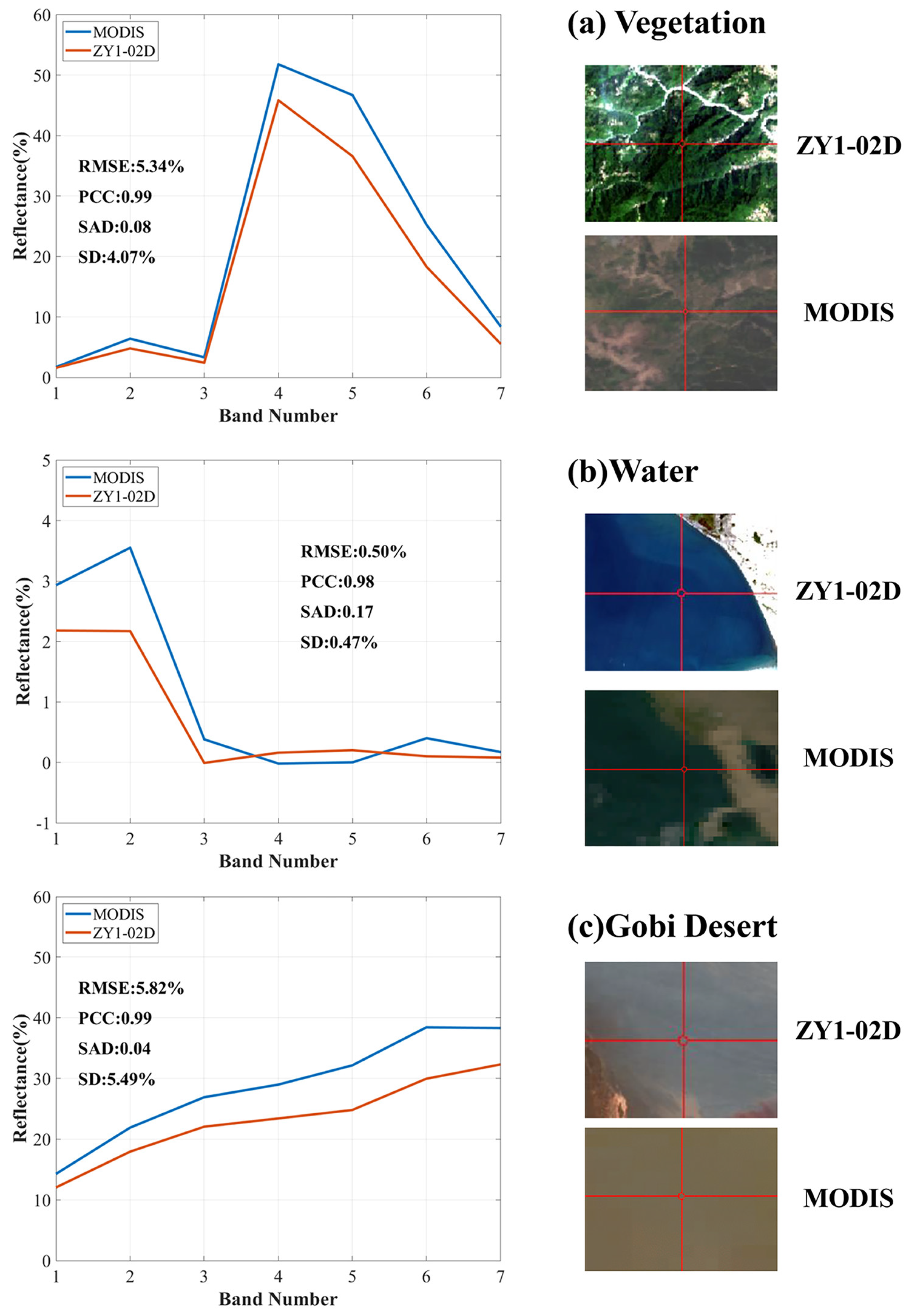
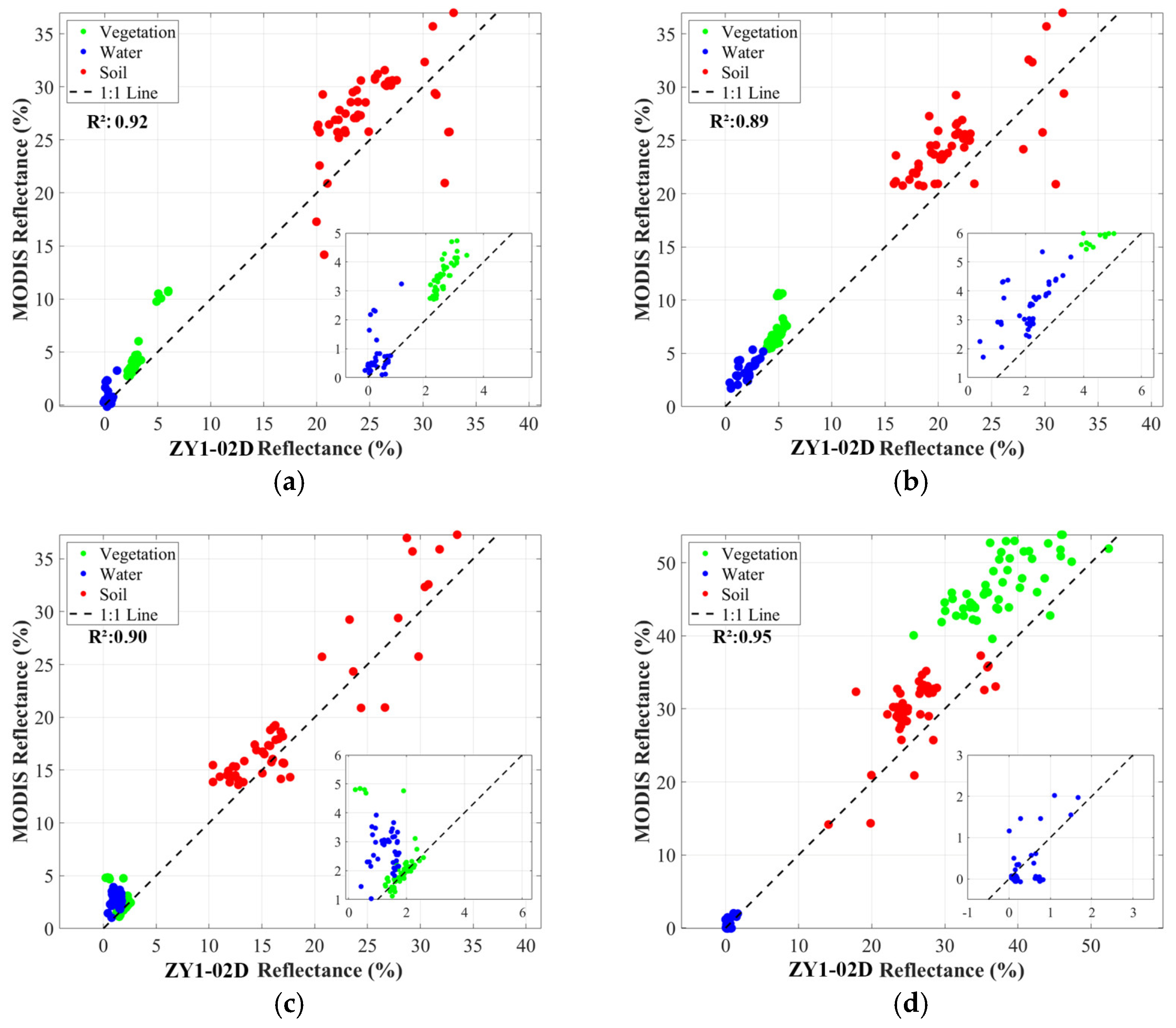
4.1.3. Validation Results
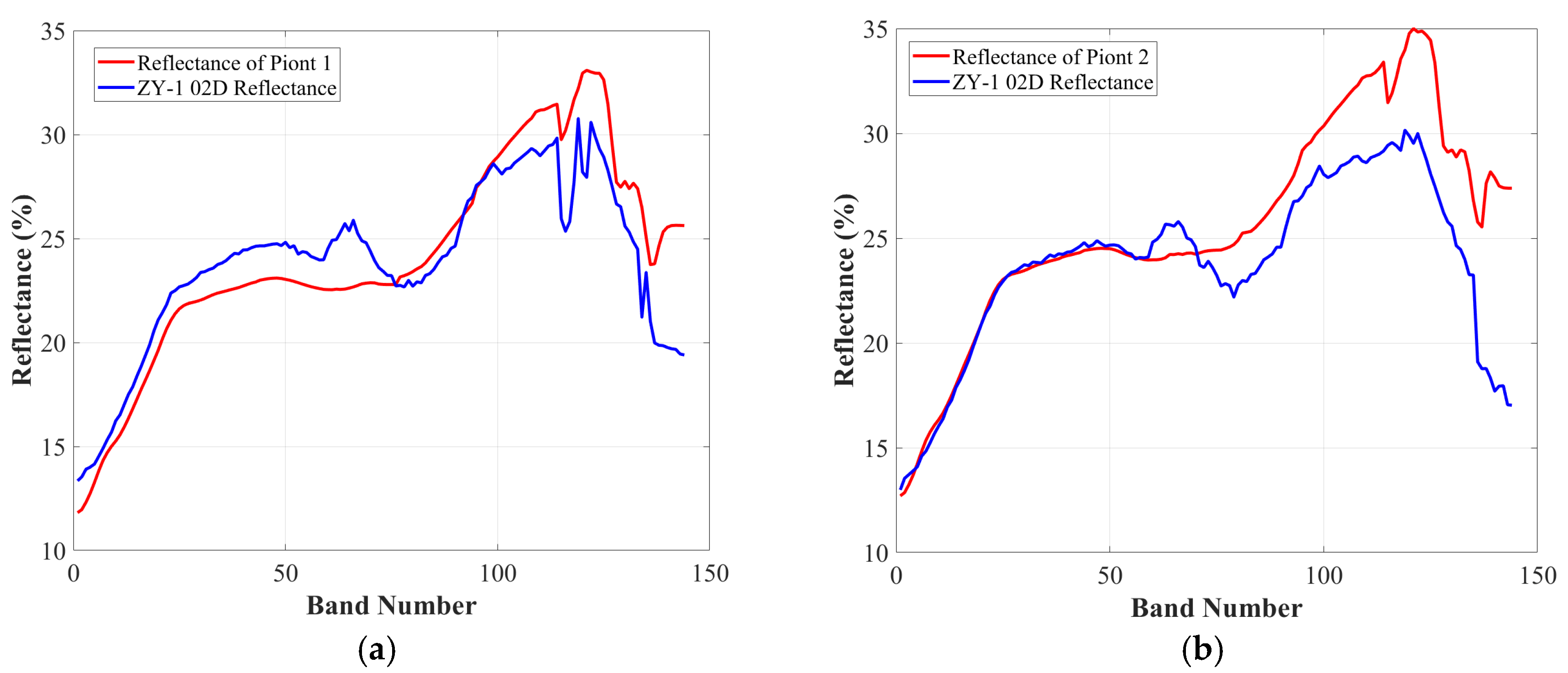
4.2. Validation with Ground Measured Data
4.3. Limitations
- (1)
- The FLAASH AC model was chosen to perform atmospheric correction. However, in certain bands, particularly in the SWIR, the AC may impact the land cover information. This may be due to the selection of AC parameters, such as the aerosol type and visibility settings. Future work could explore advanced AC models and parameter optimization to enhance correction accuracy.
- (2)
- The MODIS SR validation results for vegetation and water showed strong consistency, while lower agreement was observed for soil. This is likely due to the complexity of soil spectral characteristics, which are influenced by factors such as the land cover type, the moisture content, and the surface roughness. Greater sample diversity and a more detailed classification of soil types could improve the validation outcomes.
- (3)
- Ground truth validation demonstrated strong overall agreement with ZY1-02D SR, though discrepancies remained in certain bands. These may be attributed to environmental factors during measurement, instrument limitations, or sample representativeness. Future studies should consider expanding measurements across varied environmental conditions and employing more precise instruments.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Goetz, A.F.; Vane, G.; Solomon, J.E.; Rock, B.N. Imaging spectrometry for Earth remote sensing. Science 1985, 228, 1147–1153. [Google Scholar] [CrossRef] [PubMed]
- Goetz, A.F.H. Three decades of hyperspectral remote sensing of the Earth: A personal view. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Contreras Acosta, I.C.; Khodadadzadeh, M.; Tusa, L.; Ghamisi, P.; Gloaguen, R. A machine learning framework for drill-core mineral mapping using hyperspectral and high-resolution mineralogical data fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4829–4842. [Google Scholar] [CrossRef]
- Yang, S.; Hu, L.; Wu, H.; Ren, H.; Qiao, H.; Li, P.; Fan, W. Integration of crop growth model and random forest for winter wheat yield estimation from UAV hyperspectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6253–6269. [Google Scholar] [CrossRef]
- Erturk, A.; Plaza, A. Informative change detection by unmixing for hyperspectral images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1252–1256. [Google Scholar] [CrossRef]
- Ahmad, M.; Shabbir, S.; Oliva, D.; Mazzara, M.; Distefano, S. Spatial-prior generalized fuzziness extreme learning machine autoencoder-based active learning for hyperspectral image classification. Optik 2020, 206, 163712. [Google Scholar] [CrossRef]
- Lu, L.; Gong, Z.; Liang, Y.; Liang, S. Retrieval of chlorophyll-a concentrations of class II water bodies of inland lakes and res-ervoirs based on ZY1-02D satellite hyperspectral data. Remote Sens. 2022, 14, 1842. [Google Scholar] [CrossRef]
- Yang, Z.; Gong, C.; Ji, T.; Hu, Y.; Li, L. Water quality retrieval from ZY1-02D hyperspectral imagery in urban water bodies and comparison with Sentinel-2. Remote Sens. 2022, 14, 5029. [Google Scholar] [CrossRef]
- Wasehun, E.T.; Beni, L.H.; Di Vittorio, C.A. UAV and Satellite Remote Sensing for Inland Water Quality Assessments: A Lit-erature Review. Environ. Monit. Assess. 2024, 196, 277. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, S.; Zhu, B.; Chen, L.; Ye, Y.; Lu, P. Evaluating the capability of satellite hyperspectral imager, the ZY1–02D, for topsoil nitrogen content estimation and mapping of farmlands in black soil area, China. Remote Sens. 2022, 14, 1008. [Google Scholar] [CrossRef]
- Sun, W.; Liu, K.; Ren, G.; Liu, W.; Yang, G.; Meng, X.; Peng, J. A simple and effective spectral-spatial method for mapping large-scale coastal wetlands using China ZY1-02D satellite hyperspectral images. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102572. [Google Scholar] [CrossRef]
- Rasti, B.; Koirala, B.; Scheunders, P.; Ghamisi, P. How hyperspectral image unmixing and denoising can boost each other. Remote Sens. 2020, 12, 1728. [Google Scholar] [CrossRef]
- Rasti, B.; Scheunders, P.; Ghamisi, P.; Licciardi, G.; Chanussot, J. Noise reduction in hyperspectral imagery: Overview and application. Remote Sens. 2018, 10, 482. [Google Scholar] [CrossRef]
- Uss, M.L.; Vozel, B.; Lukin, V.V.; Chehdi, K. Local signal-dependent noise variance estimation from hyperspectral textural images. IEEE J. Sel. Top. Signal Process. 2011, 5, 469–486. [Google Scholar] [CrossRef]
- Datt, B.; McVicar, T.R.; Van Niel, T.G.; Jupp, D.L.B.; Pearlman, J.S. Preprocessing EO-1 Hyperion hyperspectral data to support the application of agricultural indexes. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1246–1259. [Google Scholar] [CrossRef]
- Tan, B.; Li, Z.; Chen, E.; Pang, Y. Preprocessing of EO-1 Hyperion hyperspectral data. Remote Sens. Inf. 2005, 6, 36–41. [Google Scholar]
- Duan, Y.; Zhang, L.; Yan, L.; Wu, T.; Liu, Y.; Tong, Q. Relative radiometric correction methods for remote sensing images and their applicability analysis. Natl. Remote Sens. Bull. 2014, 18, 597–617. [Google Scholar]
- Du, X.; Lou, D.; Zhang, C.; Xu, L.; Liu, H.; Fan, Y.; Zhang, L.; Hu, J.; Li, B. Study on extraction of alteration information from GF-5, Landsat-8 and GF-2 remote sensing data: A case study of Ningnan lead-zinc ore concentration area in Sichuan Province. Mineral. Depos. 2022, 41, 839–858. [Google Scholar]
- Ye, B.; Tian, S.; Cheng, Q.; Ge, Y. Application of lithological mapping based on Advanced Hyperspectral Imager (AHSI) imagery onboard Gaofen-5 (GF-5) satellite. Remote Sens. 2020, 12, 3990. [Google Scholar] [CrossRef]
- Wu, S.; Liu, Y. Interpretable dual-channel convolutional neural networks for lithology identification based on multisource remote sensing data. Remote Sens. 2025, 17, 1314. [Google Scholar] [CrossRef]
- Maffei, A.; Haut, J.M.; Paoletti, M.E.; Plaza, J.; Bruzzone, L.; Plaza, A. A Single Model CNN for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2516–2529. [Google Scholar] [CrossRef]
- Imamura, R.; Itasaka, T.; Okuda, M. Zero-Shot Hyperspectral Image Denoising with Separable Image Prior. In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Seoul, Republic of Korea, 27–29 October 2019. [Google Scholar]
- Revuelto, J.; Cluzet, B.; Duran, N.; Fructus, M.; Lafaysse, M.; Cosme, E.; Dumont, M. Assimilation of surface reflectance in snow simulations: Impact on bulk snow variables. J. Hydrol. 2021, 603, 126966. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Csiszar, I. Early evaluation of the VIIRS calibration, cloud mask and surface reflectance Earth data records. Remote Sens. Environ. 2014, 148, 134–145. [Google Scholar] [CrossRef]
- Badawi, M.; Helder, D.; Leigh, L.; Jing, X. Methods for Earth-observing satellite surface reflectance validation. Remote Sens. 2019, 11, 1543. [Google Scholar] [CrossRef]
- Pahlevan, N.; Mangin, A.; Balasubramanian, S.V.; Smith, B.; Alikas, K.; Arai, K.; Barbosa, C.; Bélanger, S.; Binding, C.; Bre-sciani, M.; et al. ACIX-Aqua: A global assessment of atmospheric correction methods for Landsat-8 and Sentinel-2 over lakes, rivers, and coastal waters. Remote Sens. Environ. 2021, 258, 112366. [Google Scholar] [CrossRef]
- Ren, L.; Li, L.; Tang, M. Atmospheric correction inter-comparison exercise. Remote Sens. 2018, 10, 352. [Google Scholar]
- Doxani, G.; Vermote, E.F.; Roger, J.-C.; Skakun, S.; Gascon, F.; Collison, A.; De Keukelaere, L.; Desjardins, C.; Frantz, D.; Hagolle, O.; et al. Atmospheric Correction Inter-comparison eXercise, ACIX-II Land: An assessment of atmospheric correction processors for Landsat 8 and Sentinel-2 over land. Remote Sens. Environ. 2023, 285, 113412. [Google Scholar] [CrossRef]
- Liu, S.H.; Guo, L.; Xue, B.; Wang, X.; Zhang, H.; Zhang, H.W. Evaluation of ZY1-02D Hyperspectral Satellite Surface Reflec-tance Products. In Proceedings of the XXIV ISPRS Congress: Imaging Today, Foreseeing Tomorrow, Nice, France, 6–11 June 2022. [Google Scholar]
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.B.; Angal, A.; Choi, T.; Xiong, X.; Doelling, D.R. Applications of spectral band adjustment factors (SBAF) for cross-calibration. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1267–1281. [Google Scholar] [CrossRef]
- Thome, K.J.; Helder, D.L.; Aaron, D.; Dewald, J.D. Landsat-5 TM and Landsat-7 ETM+ absolute radiometric calibration using the reflectance-based method. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2777–2785. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 Operational Land Imager radiometric calibration and stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Wang, H.; He, Z.; Wang, S.; Zhang, Y.; Tang, H. Radiometric cross-calibration of GF6-PMS and WFV sensors with Sentinel-2 MSI and Landsat 9 OLI-2. Remote Sens. 2024, 16, 1949. [Google Scholar] [CrossRef]
- Niu, C.; Tan, K.; Wang, X.; Han, B.; Ge, S.; Du, P.; Wang, F. Radiometric Cross-Calibration of the ZY1-02D Hyperspectral Imager Using the GF-5 AHSI Imager. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5519612. [Google Scholar] [CrossRef]
- Zhang, S.; Sun, B.; Li, S.; Kang, X. Noise estimation of hyperspectral image in the spatial and spectral dimensions. Natl. Remote Sens. Bull. 2021, 25, 1108–1123. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Vermote, E.F.; Kotchenova, S. Atmospheric correction for the monitoring of land surfaces. J. Geophys. Res. Atmos. 2008, 113, D23S90. [Google Scholar] [CrossRef]
- Vermote, E.F.; Tanre, D.; Deuze, J.L.; Herman, M.; Morcette, J.-J. Second Simulation of the Satellite Signal in the Solar Spectrum, 6S: An overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golden, S.M.; Chetwynd, J.H.; Hoke, M.L.; et al. MODTRAN™ 5: 2006 update. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XII; Shen, S.S., Lewis, P.E., Eds.; SPIE—The International Society for Optical Engineering: Washington, DC, USA, 2006; Volume 6233, p. 62331F. [Google Scholar]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN®6: A major upgrade of the MODTRAN® radiative transfer code. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XX; Velez-Reyes, M., Kruse, F.A., Eds.; SPIE—The International Society for Optical Engineering: Washington, DC, USA, 2014; Volume 9088, p. 90880H. [Google Scholar]
- Cooley, T.; Anderson, G.P.; Felde, G.W.; Hoke, M.L.; Ratkowski, A.J.; Chetwynd, J.H.; Gardner, J.A.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; et al. FLAASH, a MODTRAN4-based atmospheric correction algorithm, its application and validation. In Proceedings of the 2002 IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume III. [Google Scholar]
- Gao, B.-C. An operational method for estimating signal to noise ratios from data acquired with imaging spectrometers. Remote Sens. Environ. 1993, 43, 23–33. [Google Scholar] [CrossRef]
- Fu, P.; Sun, Q.; Ji, Z.; Chen, Q. A method of SNR estimation and comparison for remote sensing images. Acta Geod. Cartogr. Sin. 2013, 42, 559–567. [Google Scholar]
- Vermote, E.F.; El Saleous, N.Z.; Justice, C.O. Atmospheric correction of MODIS data in the visible to middle infrared: First results. Remote Sens. Environ. 2002, 83, 97–111. [Google Scholar] [CrossRef]
- Liang, S.; Fang, H.; Chen, M.; Shuey, C.J.; Walthall, C.; Daughtry, C. Validating MODIS land surface reflectance and albedo products: Methods and preliminary results. Remote Sens. Environ. 2002, 83, 149–162. [Google Scholar] [CrossRef]
- Zhu, P.; Liu, Y.; Li, J. Optimization and Evaluation of Widely-Used Total Suspended Matter Concentration Retrieval Methods for ZY1-02D’s AHSI Imagery. Remote Sens. 2022, 14, 684. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Date | Longitude (°) | Latitude (°) |
|---|---|---|---|
| 1 | 8 July 2023 | 105.56 | 33.51 |
| 2 | 21 July 2023 | 94.17 | 40.15 |
| 3 | 24 July 2023 | 94.20 | 40.15 |
| 4 | 28 August 2023 | 96.78 | 37.06 |
| 5 | 8 September 2023 | 94.99 | 41.92 |
| 6 | 9 September 2023 | 100.39 | 37.06 |
| Land Cover | RMSE (%) | PCC | SAD | SD (%) |
|---|---|---|---|---|
| Vegetation | 7.35 | 0.99 | 0.11 | 5.55 |
| Water | 1.21 | 0.74 | 0.59 | 0.93 |
| Soil | 7.42 | 0.69 | 0.19 | 6.25 |
| All | 6.27 | 0.97 | 0.18 | 4.48 |
| Measured Point | RMSE (%) | PCC | SAD | SD (%) |
|---|---|---|---|---|
| Point1 | 2.24 | 0.89 | 0.10 | 1.77 |
| Point2 | 3.22 | 0.84 | 0.10 | 2.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lan, Q.; He, Y.; Han, Q.; Zhao, Y.; Li, W.; Xu, L.; Ming, D. A Fast and Efficient Denoising and Surface Reflectance Retrieval Method for ZY1-02D Hyperspectral Data. Remote Sens. 2025, 17, 1844. https://doi.org/10.3390/rs17111844
Lan Q, He Y, Han Q, Zhao Y, Li W, Xu L, Ming D. A Fast and Efficient Denoising and Surface Reflectance Retrieval Method for ZY1-02D Hyperspectral Data. Remote Sensing. 2025; 17(11):1844. https://doi.org/10.3390/rs17111844
Chicago/Turabian StyleLan, Qiongqiong, Yaqing He, Qijin Han, Yongguang Zhao, Wan Li, Lu Xu, and Dongping Ming. 2025. "A Fast and Efficient Denoising and Surface Reflectance Retrieval Method for ZY1-02D Hyperspectral Data" Remote Sensing 17, no. 11: 1844. https://doi.org/10.3390/rs17111844
APA StyleLan, Q., He, Y., Han, Q., Zhao, Y., Li, W., Xu, L., & Ming, D. (2025). A Fast and Efficient Denoising and Surface Reflectance Retrieval Method for ZY1-02D Hyperspectral Data. Remote Sensing, 17(11), 1844. https://doi.org/10.3390/rs17111844