
Inherent Trade-Offs Between the Conflicting Aspects of Designing the Compact Global Navigation Satellite System (GNSS) Anti-Interference Array


Abstract
1. Introduction
- This paper first proposes a null width analysis method based on the steering vector correlation coefficient (SVCC) and conducts an in-depth investigation into the relationship between the number of antennas, antenna spacing, and null width. It is demonstrated that increasing the number of antennas reduces the null width, while decreasing the antenna spacing broadens the null width. Under finite spatial constraints, increasing the number of antennas inevitably leads to reduced antenna spacing, thereby creating a trade-off dilemma regarding null width.
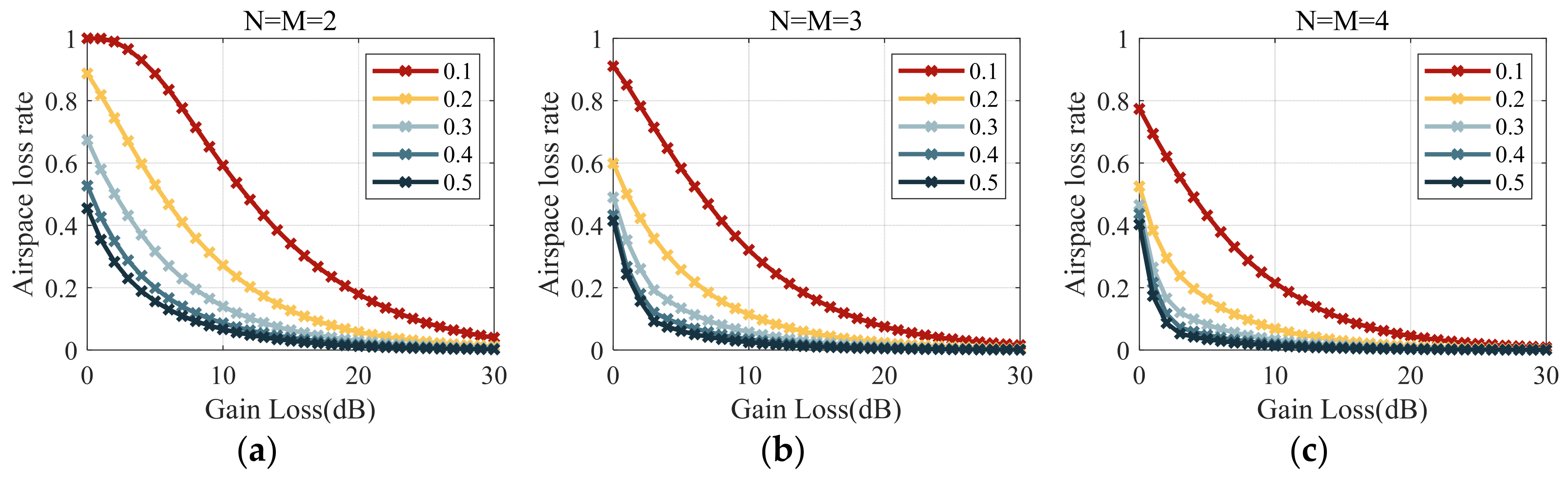
- The paper then provides a comprehensive analysis of the impact of antenna size and mutual coupling on signal-to-noise ratio (SNR). It is shown that increasing antenna size enhances antenna gain, thereby improving the SNR. However, this also increases mutual coupling at a given spacing, leading to higher SNR losses after coupling compensation.
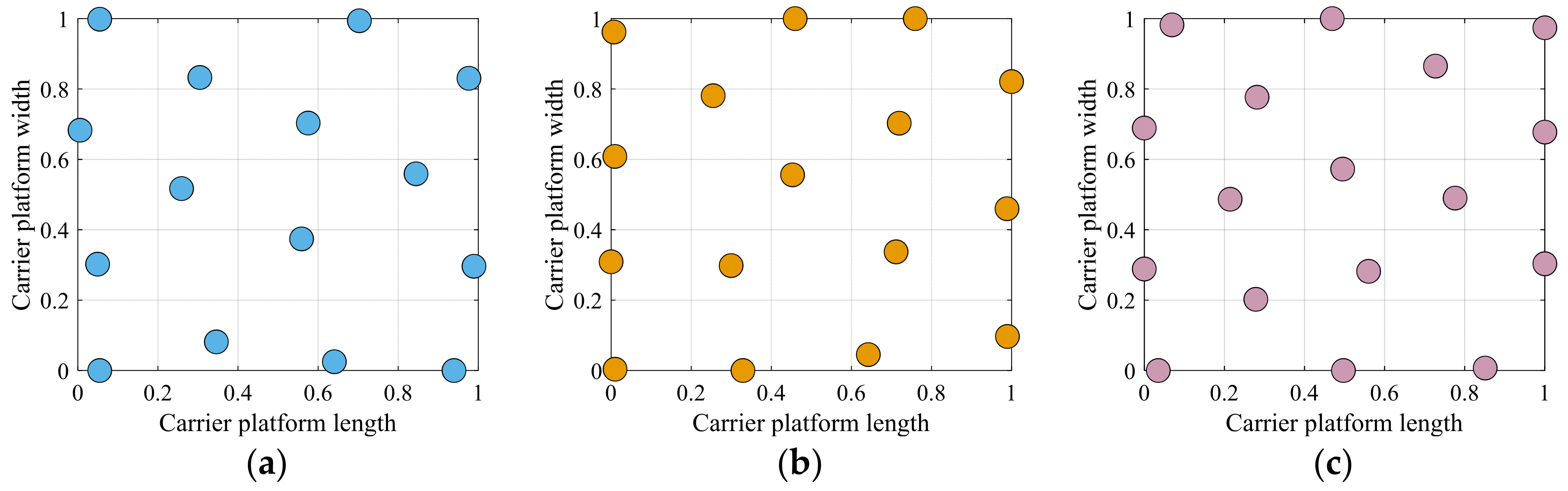
- A compact GNSS antenna array layout design integrating antenna electromagnetic characteristics based on the non-dominated sorting genetic algorithm-II (NSGA-II) model is proposed. This approach systematically considers the influence of parameters such as the number of GNSS antennas, antenna spacing, and antenna size on null width, mutual coupling, SNR loss, and receiver availability. Through iterative optimization, a Pareto front is generated with receiver availability and the number of antennas as the dual optimization objectives. Experimental results indicate that, for a carrier platform with both length and width equal to one wavelength, the optimal number of antennas ranges from 15 to 17, corresponding to receiver availability rates of 89%, 72%, and 55%, respectively.
2. Analysis of Multilayer Contradictions in Compact Global Navigation Satellite System (GNSS) Anti-Interference Arrays
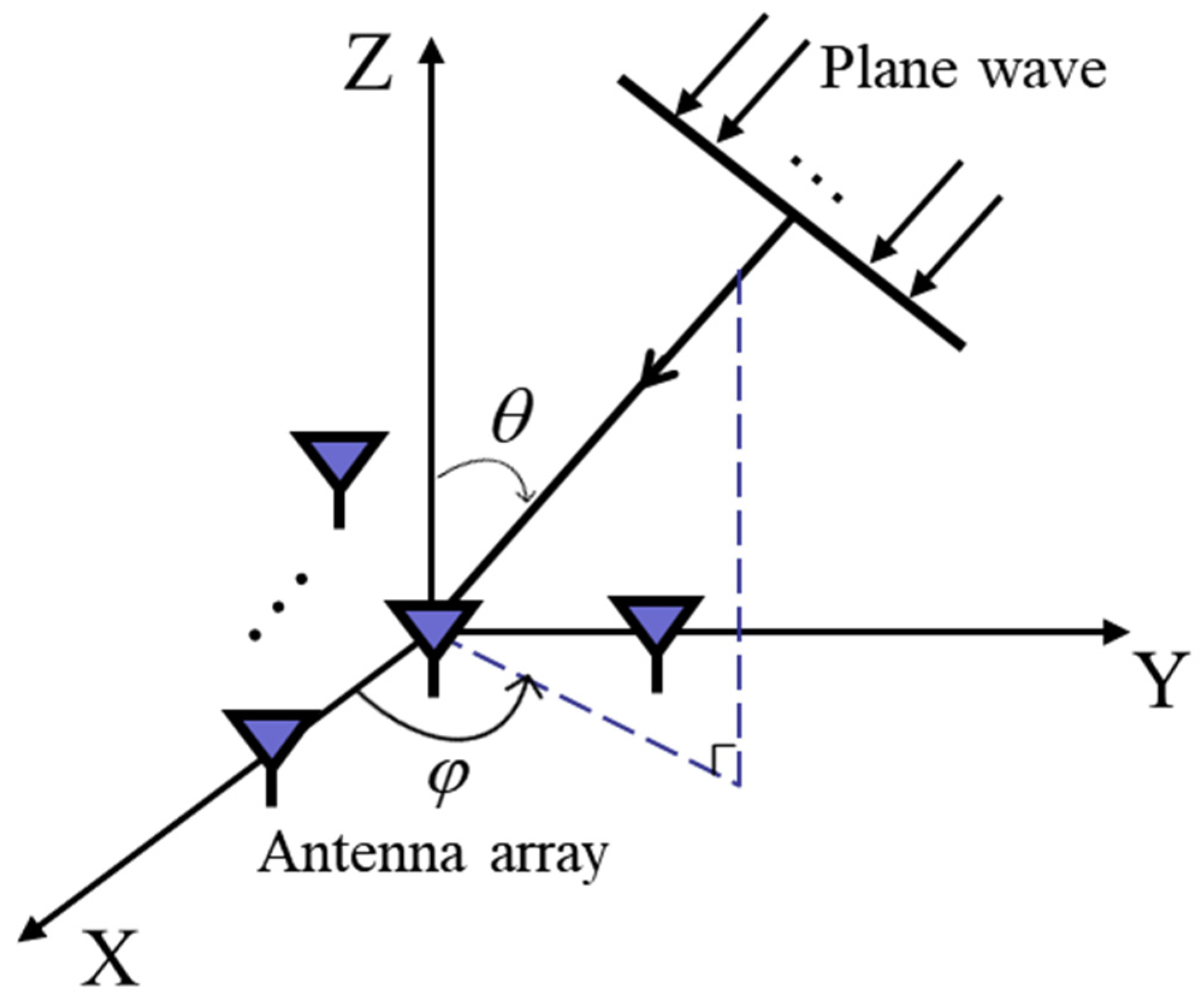
2.1. The Global Navigation Satellite System (GNSS) Array Signal Reception Model
2.2. The Contradiction of the Number and Spacing of Array Elements in Null Width
2.2.1. Linear Array
- Derivation on the number of array element:
- Derivation on the spacing of array element:
2.2.2. Rectangular Array
2.3. The Contradiction of the Size and Coupling of Antenna in Signal-to-Noise Ratio (SNR)
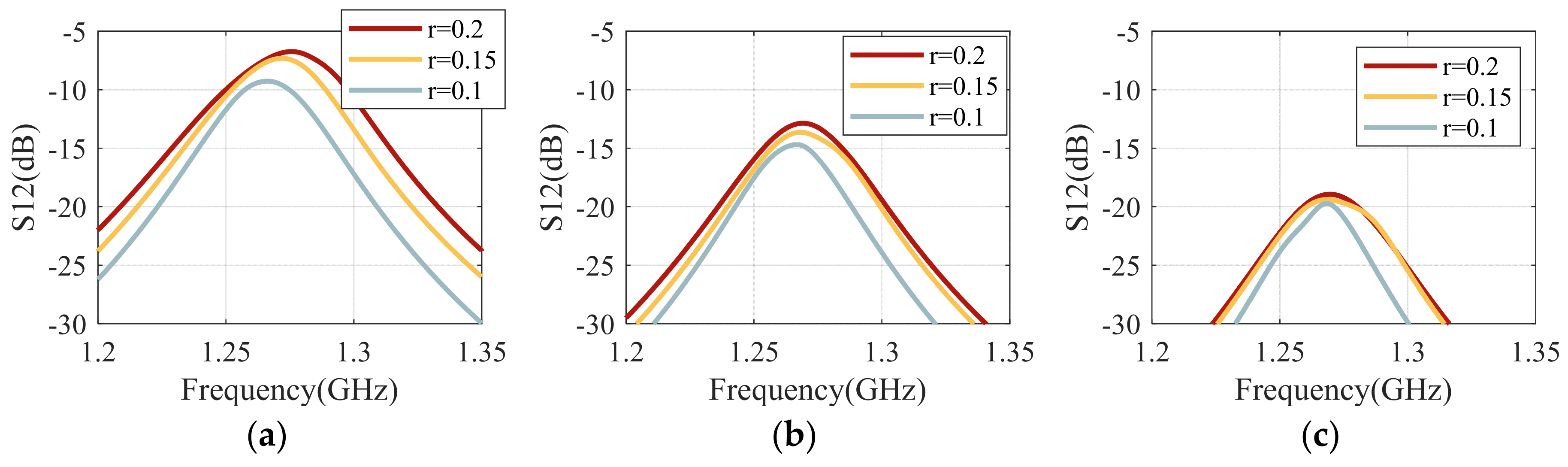
2.3.1. The Correlation Between the Size of Antenna and Signal-to-Noise Ratio (SNR)
2.3.2. The Correlation Between the Coupling of Antenna and Signal-to-Noise Ratio (SNR)
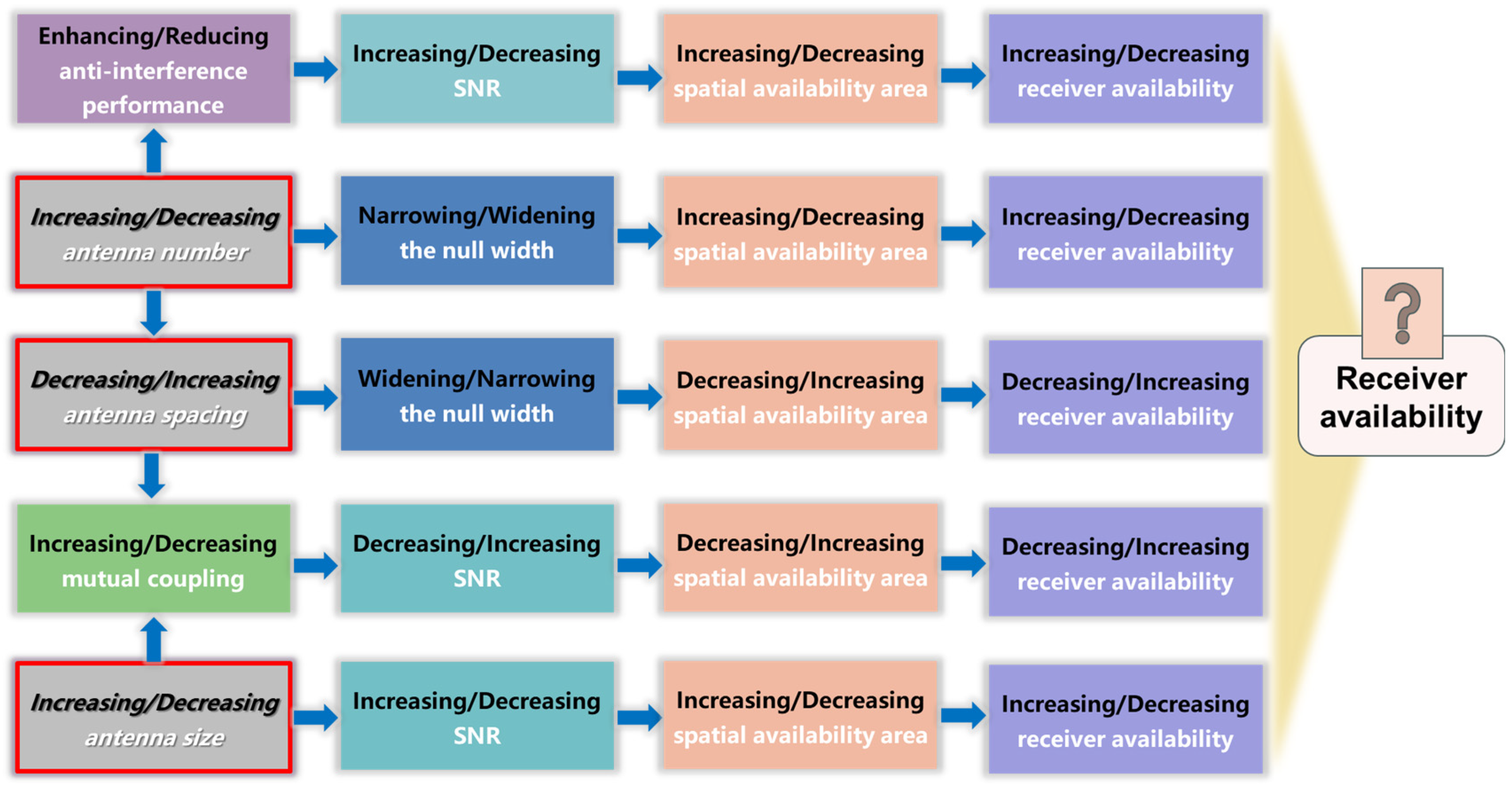
2.4. The Contradiction of the Compact Global Navigation Satellite System (GNSS) Array Layouts
3. Compact Global Navigation Satellite System (GNSS) Antenna Array Layout Design Integrating Antenna Electromagnetic Characteristics Based on the Non-Dominated Sorting Genetic Algorithm-II (NSGA-II) Model
3.1. Problem Modeling and Variable Definition
- Antenna positions: , representing the two-dimensional coordinates of antennas.
- Antenna size: , representing the equivalent radius of each antenna. Since circularly polarized antennas generally satisfy central symmetry, they are typically square in shape. To simplify the analysis and maintain the basic consistency of the antenna structure, it is set that .
- Maximize the number of antennas: , .
- Maximize the average receiver availability: , .
- And the constraint conditions are as follows: Minimum spacing constraint: , where is the distance between the antenna and the antenna, .
- Boundary constraint: , where and is the length and width of the carrier platform. All antennas must be located within this rectangular area.
- Antenna size constraint: .
3.2. Population Initialization
- Antenna number initialization: Based on the carrier platform area and antenna size, the theoretical maximum number of antennas is and it is set that . For each antenna array, antennas are randomly selected from a uniform distribution .
- Antenna position initialization: Utilize Poisson Disk Sampling to generate an initial uniformly distributed point set within the region, ensuring that the distance constraint between any two points is satisfied. Subsequently, refine the initial point set by employing a potential function that maximizes the minimum distance, thereby enhancing uniformity.
- Antenna size initialization: For each antenna array, the sizes of all antennas are selected from a uniform distribution .
- Node chromosome encoding initialization: Encode the antenna positions and antenna sizes into chromosomes, and utilize a dynamic mask matrix to accommodate chromosomes of varying lengths for different nodes.
3.3. Model Establishment
3.3.1. Fitness Calculation
3.3.2. Crowding Distance Calculation
3.3.3. Genetic Operations
- Crossover operation: Two parents are randomly selected from the mating pool, a crossover point is randomly chosen, and offspring are generated by exchanging segments. Duplicate points are then removed, and a repair process is applied to ensure physical feasibility.
- Mutation operation: Mutation operations can be categorized into antenna number mutation, antenna size mutation, and position mutation. Antenna number mutation can be further divided into adding and removing antennas. When adding antennas, new positions are randomly generated within the carrier platform area, and a repair process is applied to ensure physical feasibility. When reducing the number of antennas, the coupling contribution of each antenna can be calculated: and the antenna with the highest coupling contribution is removed. Position mutation involves applying a Cauchy perturbation to the coordinates of the selected antenna, which can be expressed as follows: , . If the perturbation violates the constraints, a repair process is triggered. Antenna size mutation follows the rule: .
3.3.4. Conflict Resolution
- Spacing conflict resolution: First, calculate the distances between all antennas, identify the conflicting antenna pairs, and move them in opposite directions by the same distance to satisfy the minimum spacing constraint.
- Boundary conflict resolution: For coordinates that exceed the boundary, project them onto the boundary of the region. After resolving the boundary conflict, recheck for spacing conflicts. If a conflict occurs, perform spacing conflict resolution.
- Reset repair: If neither spacing conflict resolution nor boundary conflict resolution can satisfy the conditions, a reset repair is performed to meet the constraints.
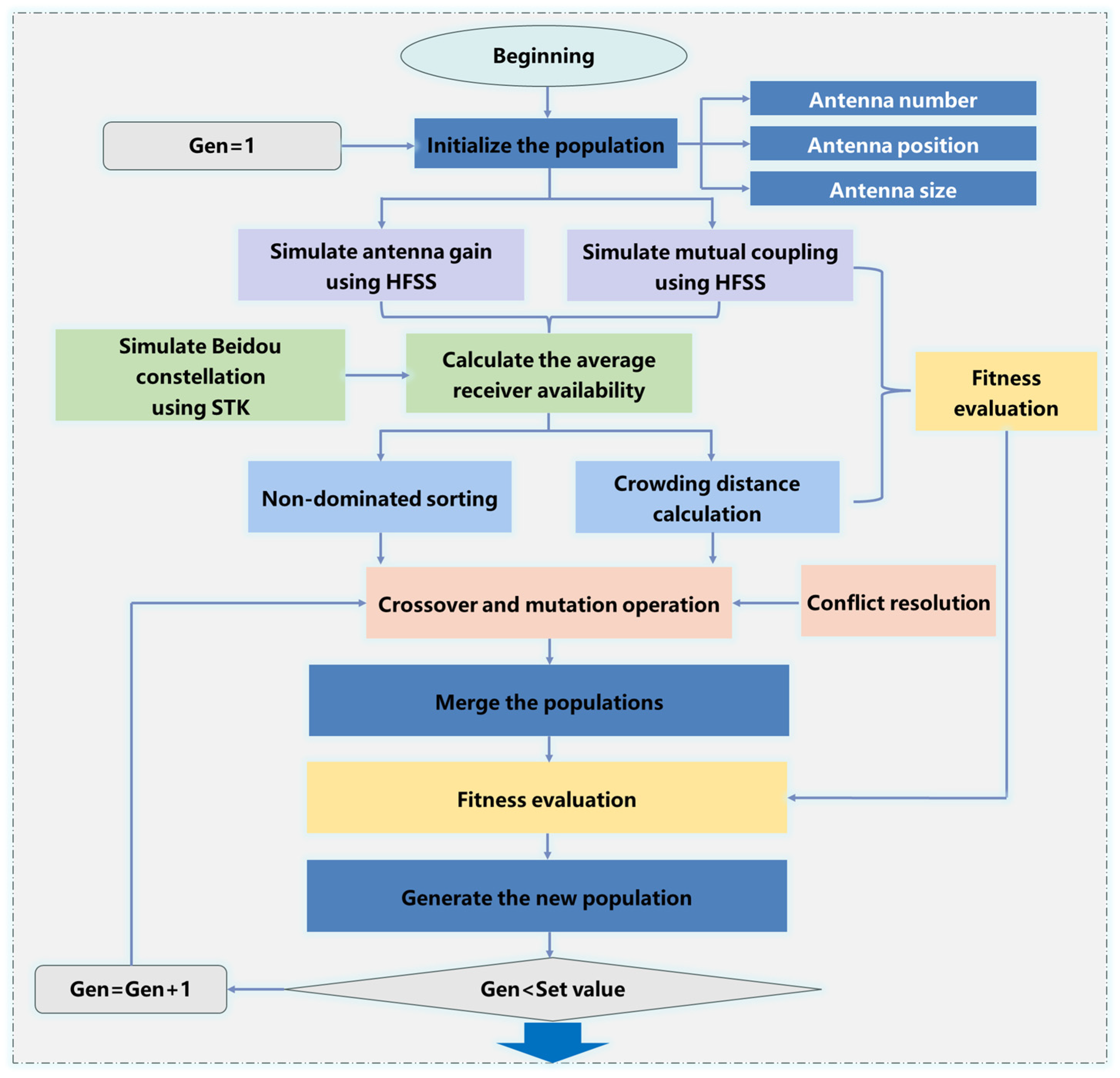
- In summary, the flowchart of the compact GNSS antenna array layout design integrating antenna electromagnetic characteristics based on the NSGA-II model is shown as follows in Figure 5.
4. Experimental Results
4.1. The Verification of the Number and Spacing of Antenna in Null Width
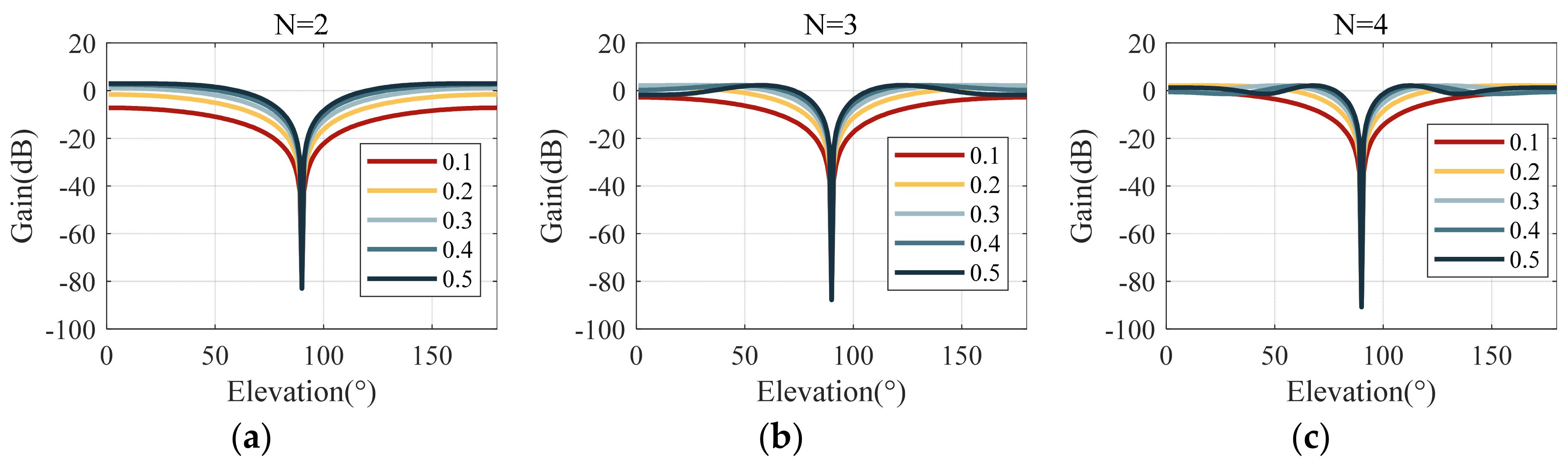
4.1.1. Linear Array Verification
4.1.2. Rectangular Array Verification
4.2. The Verification of the Size and Coupling of Antenna in Signal-to-Noise Ratio (SNR)
4.2.1. The Relationship Between Antenna Size and Signal-to-Noise Ratio (SNR)
4.2.2. The Relationship Between Antenna Size, Spacing, and Coupling
4.2.3. The Relationship Between Coupling and Signal-to-Noise Ratio (SNR)
4.3. Compact Global Navigation Satellite System (GNSS) Antenna Array Layout Design Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bu, J.; Liu, X.; Wang, Q.; Li, L.; Zuo, X.; Yu, K.; Huang, W. Ocean Remote Sensing Using Spaceborne GNSS-Reflectometry: A Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 13047–13076. [Google Scholar] [CrossRef]
- Jiao, N.; Xiang, Y.; Wang, F.; Zhou, G.; You, H. Investigation of Global International GNSS Service Control Information Extraction for Geometric Calibration of Remote Sensing Images. Remote Sens. 2024, 16, 3860. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Gao, Y.; Shen, Y. Real-Time Carrier Phase Multipath Detection Based on Dual-Frequency C/N0 Data. GPS Solut. 2019, 23, 7. [Google Scholar] [CrossRef]
- Li, X.; Lu, Z.; Yuan, M.; Liu, W.; Wang, F.; Liu, P. Tradeoff of Code Estimation Error Rate and Terminal Gain in SCER Attack. IEEE Trans. Instrum. Meas. 2024, 73, 1–12. [Google Scholar] [CrossRef]
- Elghamrawy, H.; Karaim, M.; Korenberg, M.; Noureldin, A. High-Resolution Spectral Estimation for Continuous Wave Jamming Mitigation of GNSS Signals in Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7881–7895. [Google Scholar] [CrossRef]
- Zhang, K.; Li, X.; Chen, L.; Liu, Z.; Xie, Y. Impact Analysis of Orthogonal Circular-Polarized Interference on GNSS Spatial Anti-Jamming Array. Remote Sens. 2024, 16, 4506. [Google Scholar] [CrossRef]
- Wang, J.; Liu, W.; Chen, F.; Lu, Z.; Ou, G. GNSS Array Receiver Faced with Overloaded Interferences: Anti-Jamming Performance and the Incident Directions of Interferences. J. Syst. Eng. Electron. 2023, 34, 335–341. [Google Scholar] [CrossRef]
- Sun, K.; Chen, Y. A Novel GNSS Sweep Interference Detection and Mitigation Method Based on Radon–Wigner Transform. IEEE Sens. J. 2023, 23, 26087–26095. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, F.; Lu, Z.; Wang, F. Anti-Jamming Method and Implementation for GNSS Receiver Based on Array Antenna Rotation. Remote Sens. 2022, 14, 4774. [Google Scholar] [CrossRef]
- Wang, C.; Cui, X.; Liu, G.; Lu, M. Two-Stage Spatial Whitening and Normalized MUSIC for Robust DOA Estimation of GNSS Signals under Jamming. IEEE Trans. Aerosp. Electron. Syst. 2024, 61, 2557–2572. [Google Scholar] [CrossRef]
- Yang, X.; Liu, W.; Chen, F.; Lu, Z.; Wang, F. Analysis of the Effects Power-Inversion (PI) Adaptive Algorithm Have on GNSS Received Pseudorange Measurement. IEEE Access 2022, 10, 70242–70251. [Google Scholar] [CrossRef]
- Yang, C.; Dai, Y.; Zhou, H.; Zhou, B. A Radar Array Expansion Design Method Based on Modular Subarray Layout. J. Phys. Conf. Ser. 2024, 2853, 012024. [Google Scholar] [CrossRef]
- Wang, Q.; Xiao, H.; Yang, J.; Gao, R.; Liu, S. Mapping-Based Pattern Synthesis of Concentric Elliptical Arrays for Sidelode Suppression and Aperture Reduction. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 2206–2210. [Google Scholar] [CrossRef]
- Gong, Y.; Xiao, S.; Wang, B.-Z. An ANN-Based Synthesis Method for Nonuniform Linear Arrays Including Mutual Coupling Effects. IEEE Access 2020, 8, 144015–144026. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, C.-C.; Volakis, J.L. Single-Fed Circularly Polarized Antenna Element With Reduced Coupling for GPS Arrays. IEEE Trans. Antennas Propag. 2008, 56, 1469–1472. [Google Scholar] [CrossRef]
- Kasemodel, J.A.; Chen, C.-C.; Gupta, I.J.; Volakis, J.L. Miniature Continuous Coverage Antenna Array for GNSS Receivers. Antennas Wirel. Propag. Lett. IEEE 2008, 7, 592–595. [Google Scholar] [CrossRef]
- Kramer, B.A.; Lee, M.; Chen, C.C.; Volakis, J.L. A Miniature Conformal Spiral Antenna Using Inductive and Dielectric Loading. In Proceedings of the 2007 IEEE Antennas and Propagation Society International Symposium, Honolulu, HI, USA, 9–15 June 2007. [Google Scholar]
- Li, S.; Wang, F.; Tang, X.; Ni, S.; Lin, H. Anti-Jamming GNSS Antenna Array Receiver with Reduced Phase Distortions Using a Robust Phase Compensation Technique. Remote Sens. 2023, 15, 4344. [Google Scholar] [CrossRef]
- Volakis, J.L.; O’Brien, A.J.; Chen, C.-C. Small and Adaptive Antennas and Arrays for GNSS Applications. Proc. IEEE 2016, 104, 1221–1232. [Google Scholar] [CrossRef]
- Feng, L.R.; Yan, D.L.; Liang, W.Y.; Chao, W. Analysis of the Performance of Adaptive Arrays with Mutual Coupling Compensation. In Proceedings of the 2006 IEEE Antennas and Propagation Society International Symposium, Albuquerque, NM, USA, 9–14 July 2006; pp. 4781–4784. [Google Scholar]
- Wang, B.; Chang, Y.; Sun, Y. Performance of the Large-Scale Adaptive Array Antennas in the Presence of Mutual Coupling. IEEE Trans. Antennas Propag. 2016, 64, 2236–2245. [Google Scholar] [CrossRef]
- Fante, R.L. Principles of Adaptive Space-Time-Polarization Cancellation of Broadband Interference. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004. [Google Scholar]
- Wang, H.; Yin, X.; Wang, F.; Meng, L.; Wang, Z.; Wang, Z. Improved NSGA-II Algorithm-Based SDVRP Considering Simultaneously Pickup and Delivery of Multi-Commodity. IEEE Trans. Intell. Transp. Syst. 2025, 1–13. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coupling (dB) | Loss (dB) |
|---|---|
| −7.16 | 0.7639 |
| −7.45 | 0.7184 |
| −9.30 | 0.4824 |
| −12.87 | 0.2187 |
| −13.64 | 0.1839 |
| −14.71 | 0.1444 |
| −18.96 | 0.0548 |
| −19.38 | 0.0498 |
| −19.72 | 0.0461 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zhao, X.; Ye, X.; Lu, Z.; Wang, F.; Liu, P. Inherent Trade-Offs Between the Conflicting Aspects of Designing the Compact Global Navigation Satellite System (GNSS) Anti-Interference Array. Remote Sens. 2025, 17, 1760. https://doi.org/10.3390/rs17101760
Li X, Zhao X, Ye X, Lu Z, Wang F, Liu P. Inherent Trade-Offs Between the Conflicting Aspects of Designing the Compact Global Navigation Satellite System (GNSS) Anti-Interference Array. Remote Sensing. 2025; 17(10):1760. https://doi.org/10.3390/rs17101760
Chicago/Turabian StyleLi, Xiangjun, Xiaoyu Zhao, Xiaozhou Ye, Zukun Lu, Feixue Wang, and Peiguo Liu. 2025. "Inherent Trade-Offs Between the Conflicting Aspects of Designing the Compact Global Navigation Satellite System (GNSS) Anti-Interference Array" Remote Sensing 17, no. 10: 1760. https://doi.org/10.3390/rs17101760
APA StyleLi, X., Zhao, X., Ye, X., Lu, Z., Wang, F., & Liu, P. (2025). Inherent Trade-Offs Between the Conflicting Aspects of Designing the Compact Global Navigation Satellite System (GNSS) Anti-Interference Array. Remote Sensing, 17(10), 1760. https://doi.org/10.3390/rs17101760