


Assessment of the Added Value of the GOCE GPS Data on the GRACE Monthly Gravity Field Solutions


Abstract
1. Introduction
2. Materials and Methods
2.1. Data and Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Background Force Models | Description |
|---|---|
| Earth’s gravity field | GOCO06s [35] (200 200) |
| Solid Earth and pole tides | IERS Conventions 2010 [36] |
| Ocean tides | FES2014b [37] (180 180) |
| Ocean pole tides | Desai [42] (30 30) |
| Atmosphere and ocean de-aliasing | AOD1B RL06 [43] |
| Third-body perturbations | DE440 [38] |
| General relativistic effects | IERS Conventions 2010 [36] |
| Reference frames | |
| Conventional inertial reference frame | IERS Conventions 2010 [36] |
| Precession/nutation | IAU 2006/2000A [36] |
| Earth orientation parameters | IERS EOP 08 C04 |
| Input data | |
| Satellite kinematic orbits | 30 s sampling |
| Satellite attitudes | GOCE star tracker quaternions (EGG_IAQ product, ESA [39]) |
| Satellite non-gravitational accelerations | GOCE common-mode accelerations (EGG_CCD product, ESA [39]) |
| Estimated parameters | |
| Initial state vector | Position and velocity per arc |
| Accelerometer bias | Piece-wise linear with an interval of 3 h |
| Spherical harmonic coefficients | Between degrees 2 and 96 |
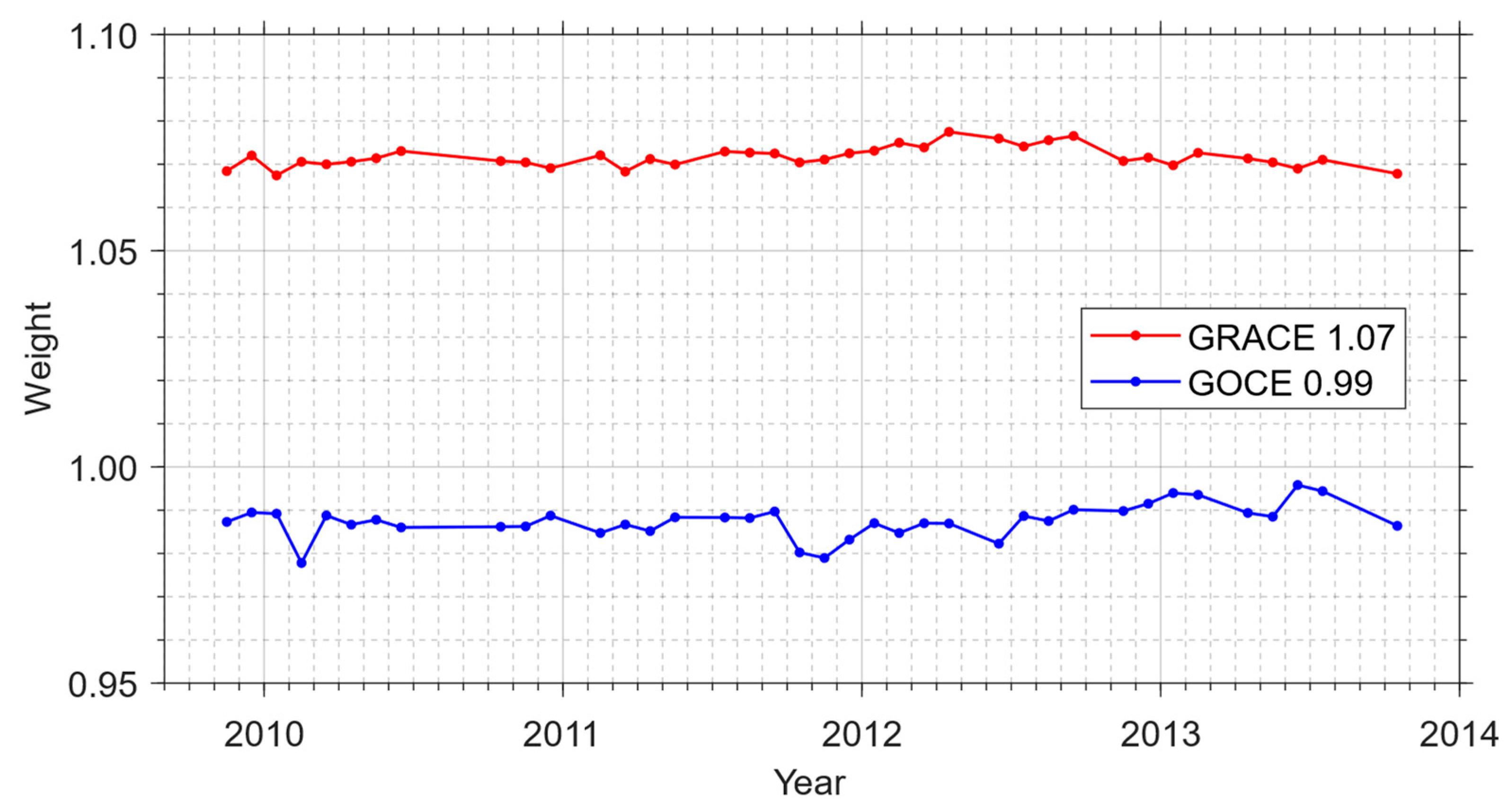
2.2. Data Combination
3. Results
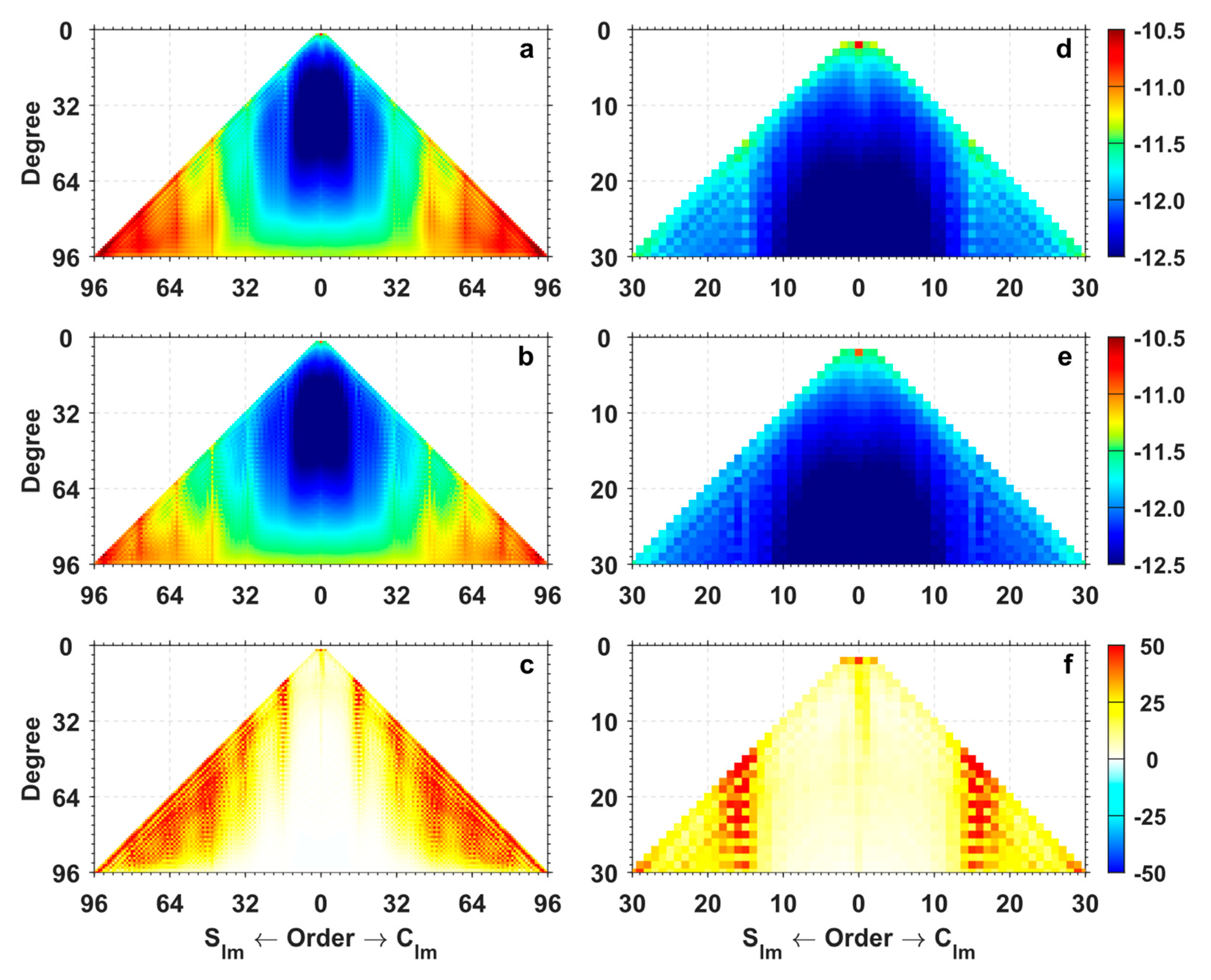
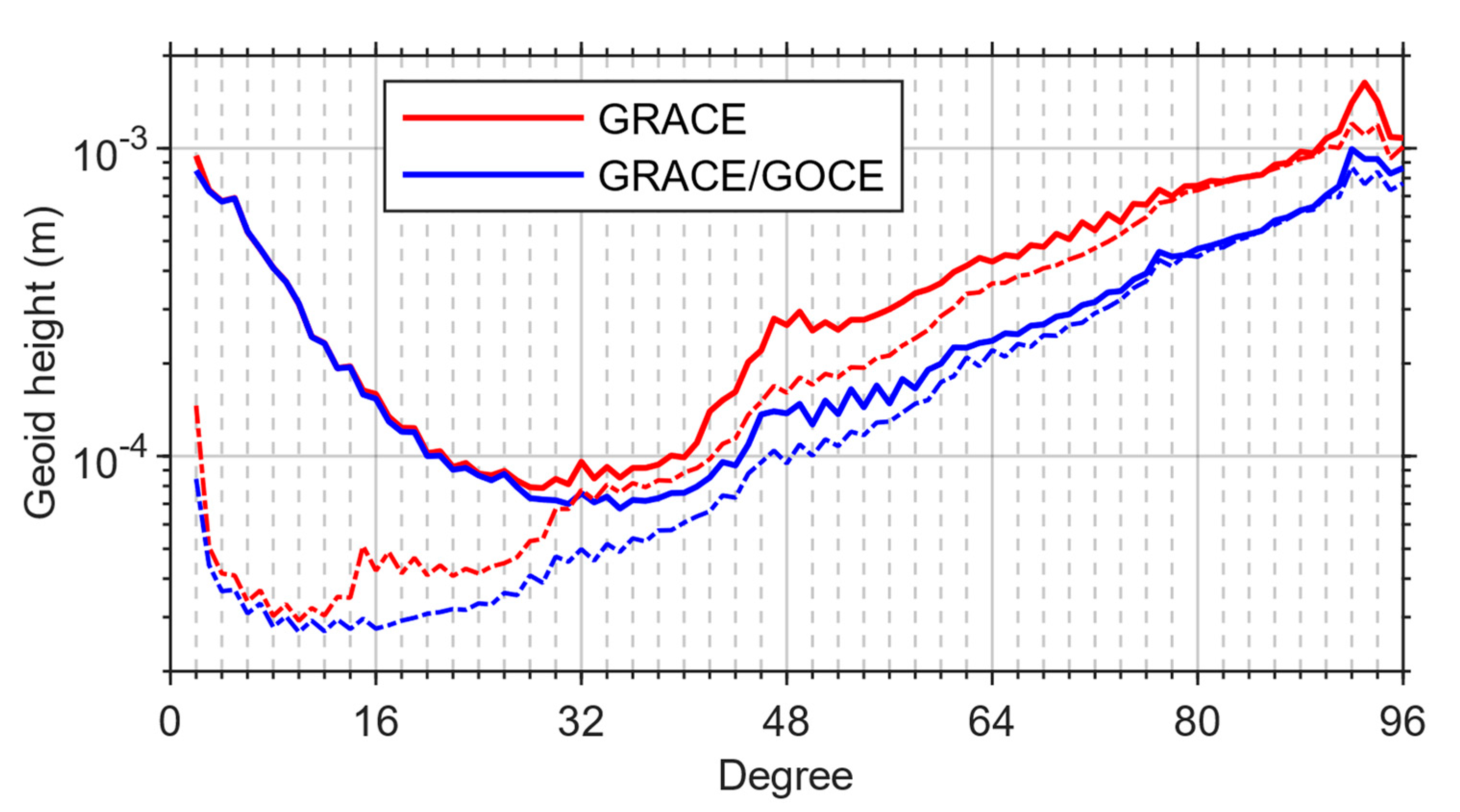
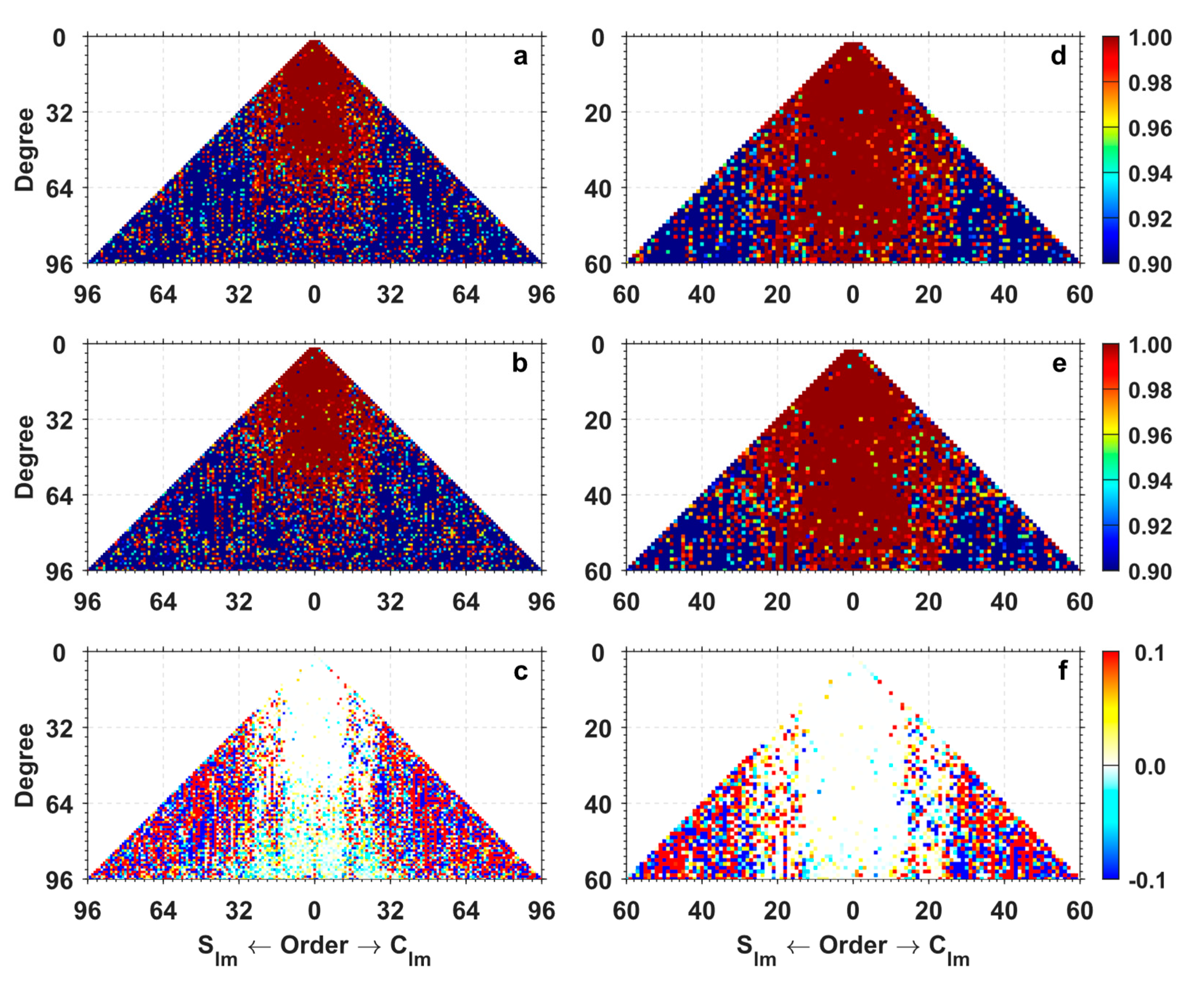
3.1. Analysis in the Spectral Domain
3.2. Analysis in the Spatial Domain
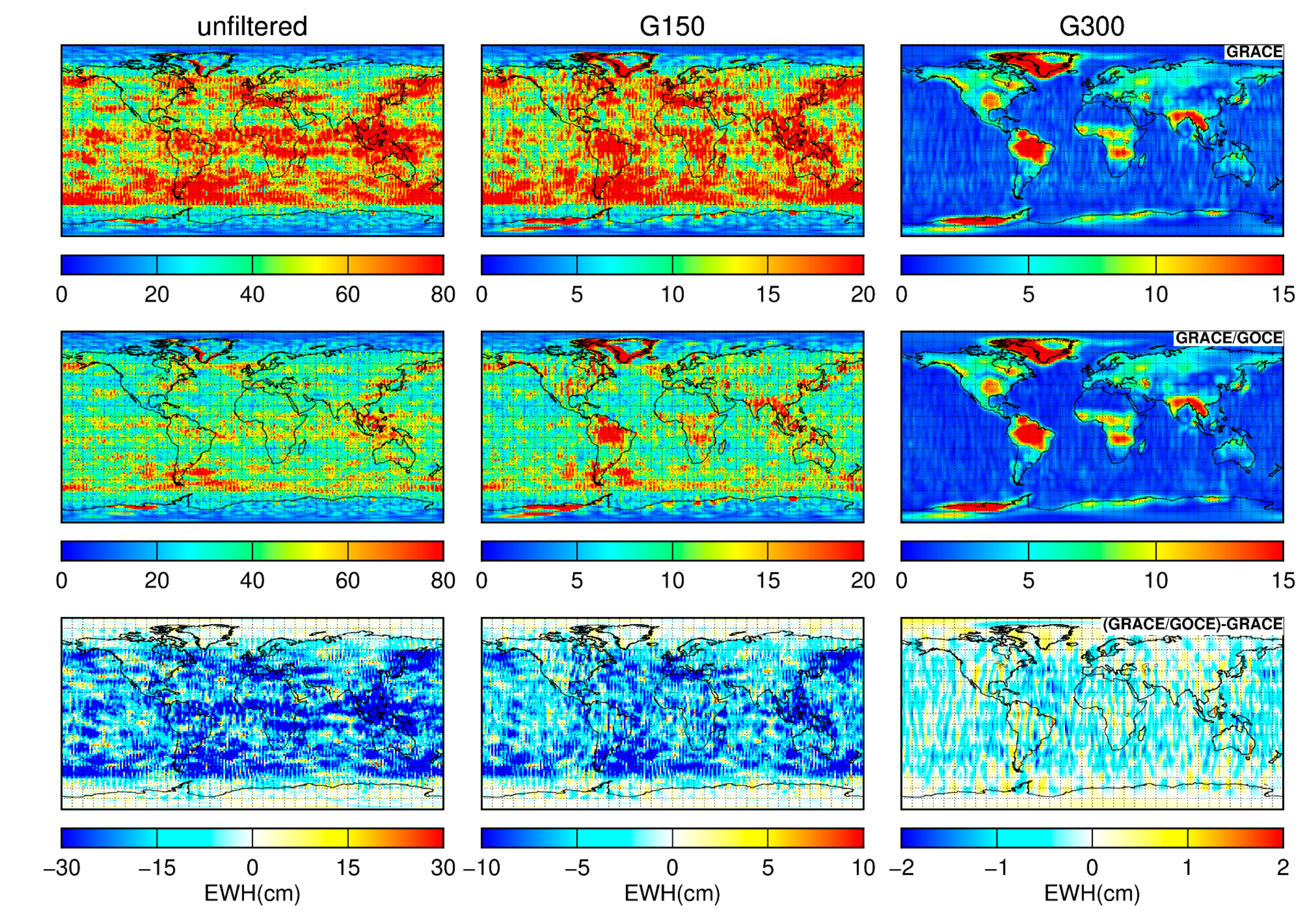
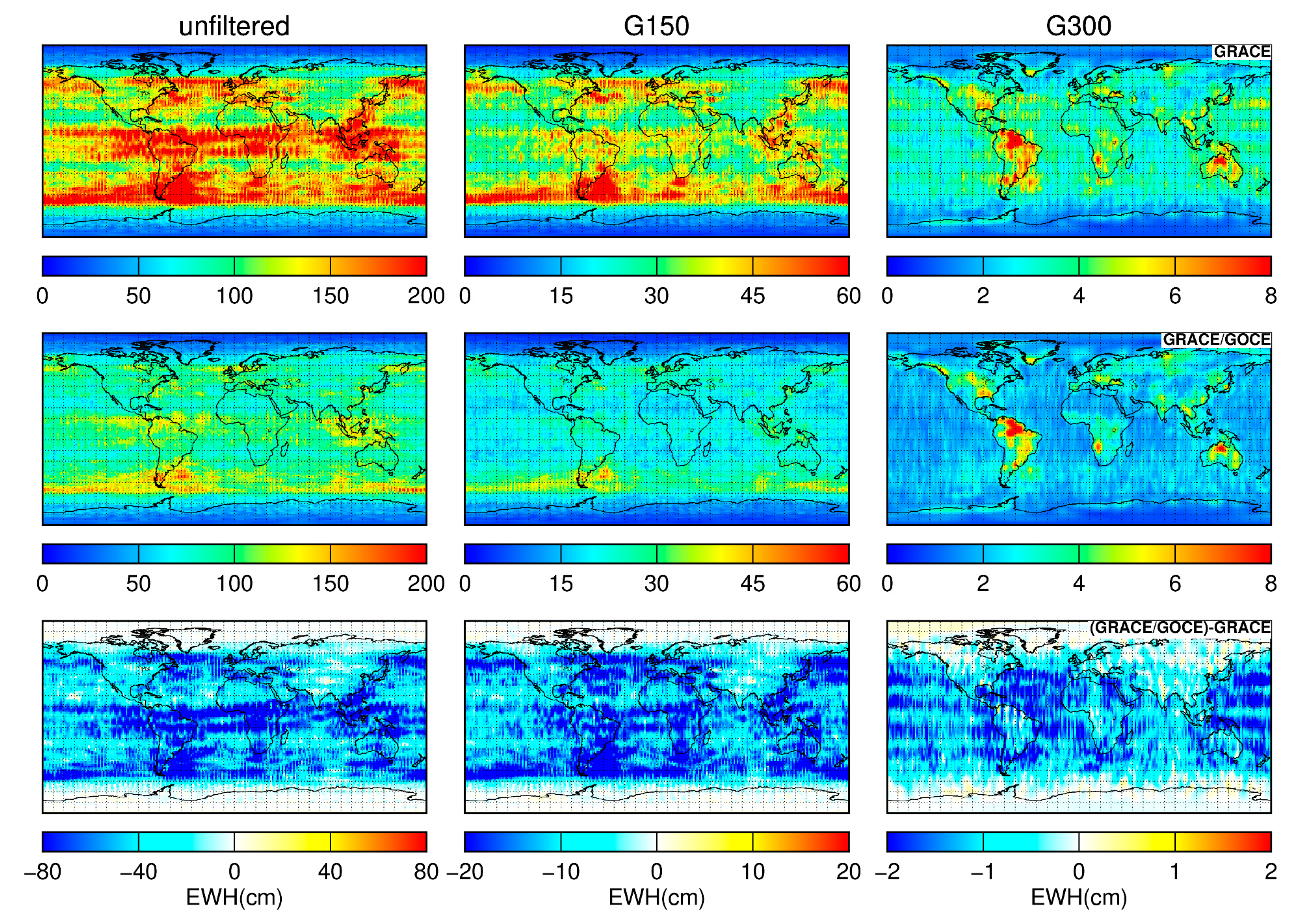
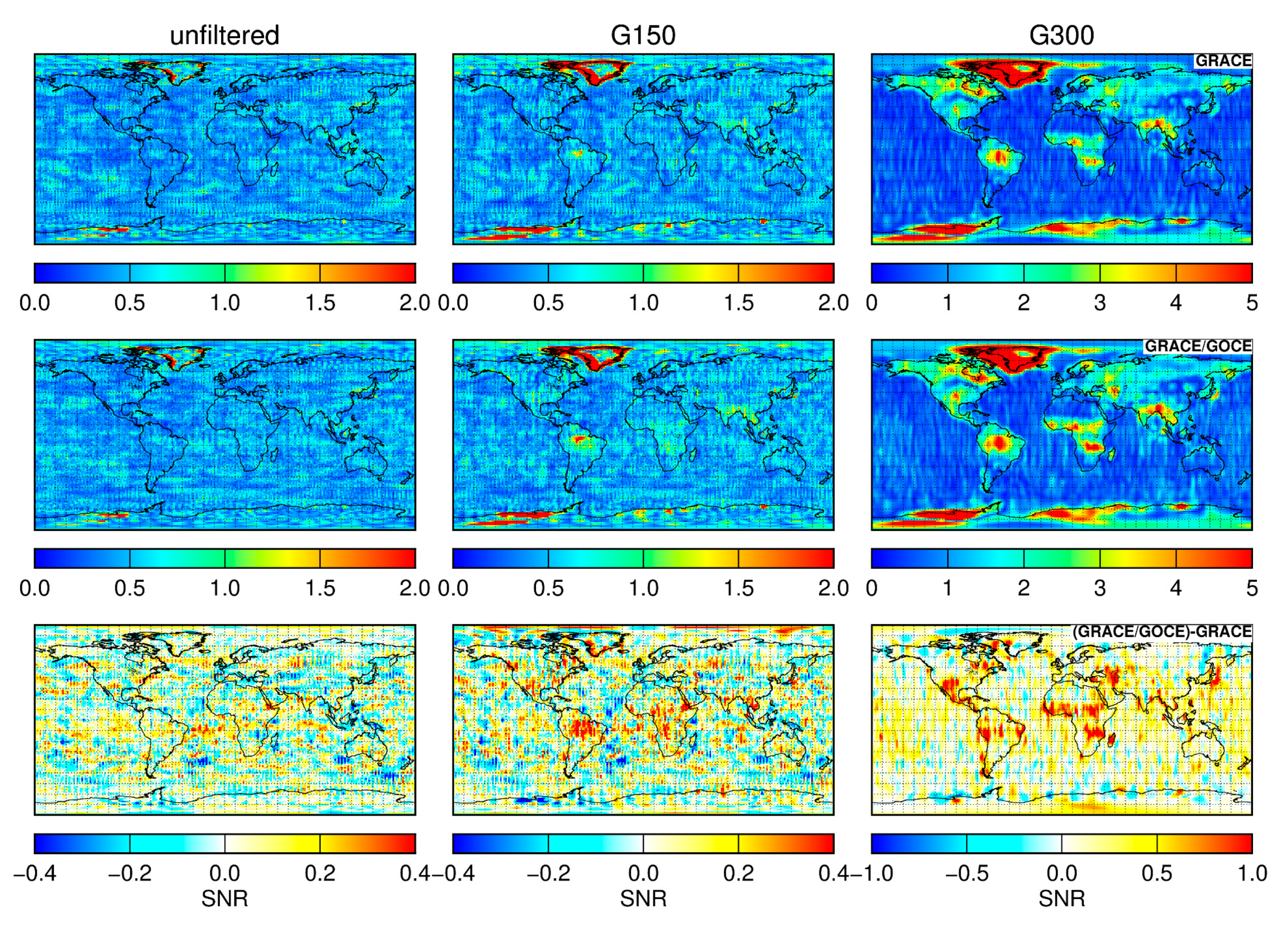
3.2.1. Gridded Mass Changes
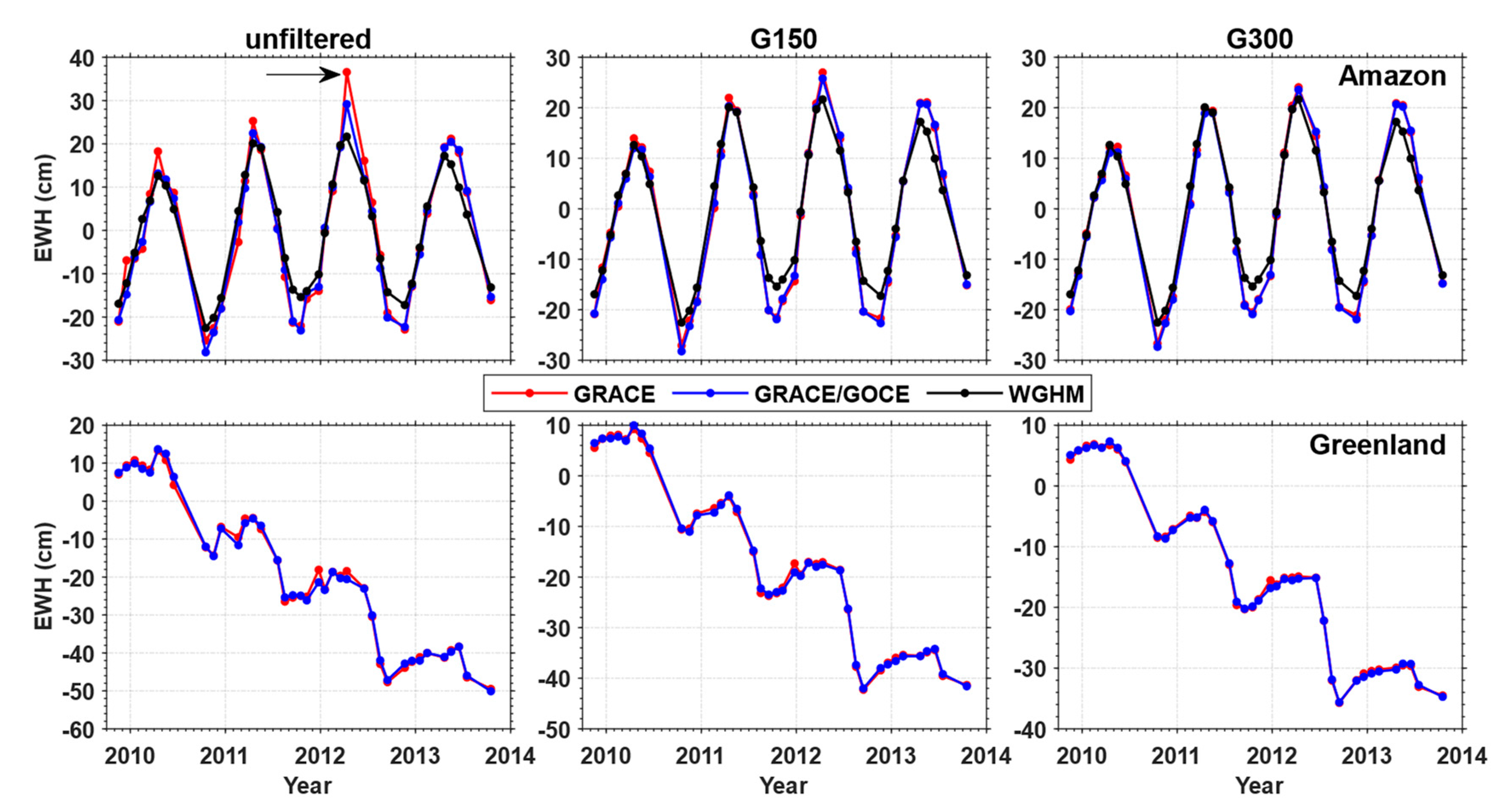
3.2.2. Regional Mass Changes
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE measurements of mass variability in the Earth system. Science 2004, 305, 503–505. [Google Scholar] [CrossRef] [PubMed]
- Landerer, F.W.; Flechtner, F.M.; Save, H.; Webb, F.H.; Bandikova, T.; Bertiger, W.I.; Bettadpur, S.V.; Byun, S.H.; Dahle, C.; Dobslaw, H.; et al. Extending the Global Mass Change Data Record: GRACE Follow-On Instrument and Science Data Performance. Geophys. Res. Lett. 2020, 47, e2020GL088306. [Google Scholar] [CrossRef]
- Kim, J. Simulation Study of a Low-Low Satellite-to-Satellite Tracking Mission. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2000. [Google Scholar]
- Swenson, S.; Wahr, J. Post-processing removal of correlated errors in GRACE data. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Klees, R.; Revtova, E.A.; Gunter, B.C.; Ditmar, P.; Oudman, E.; Winsemius, H.C.; Savenije, H.H.G. The design of an optimal filter for monthly GRACE gravity models. Geophys. J. Int. 2008, 175, 417–432. [Google Scholar] [CrossRef]
- Kusche, J.; Schmidt, R.; Petrovic, S.; Rietbroek, R. Decorrelated GRACE time-variable gravity solutions by GFZ, and their validation using a hydrological model. J. Geod. 2009, 83, 903–913. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, P.; Tang, L.; Luo, Z. A New GRACE Filtering Approach Based on Iterative Image Convolution. J. Geophys. Res. Solid Earth 2023, 128, e2023JB026553. [Google Scholar] [CrossRef]
- Flechtner, F.; Neumayer, K.-H.; Dahle, C.; Dobslaw, H.; Fagiolini, E.; Raimondo, J.-C.; Güntner, A. What Can be Expected from the GRACE-FO Laser Ranging Interferometer for Earth Science Applications? Surv. Geophys. 2016, 37, 453–470. [Google Scholar] [CrossRef]
- Zhou, H.; Tang, L.; Tan, D.; Duan, H.; Pail, R.; Luo, Z.; Zhou, Z. Impacts of frequency-dependent instrument noise for next-generation gravimetric mission on determining temporal gravity field model. J. Geod. 2023, 97, 23. [Google Scholar] [CrossRef]
- Ditmar, P.; Teixeira da Encarnação, J.; Hashemi Farahani, H. Understanding data noise in gravity field recovery on the basis of inter-satellite ranging measurements acquired by the satellite gravimetry mission GRACE. J. Geod. 2012, 86, 441–465. [Google Scholar] [CrossRef]
- Peidou, A.; Pagiatakis, S. Stripe Mystery in GRACE Geopotential Models Revealed. Geophys. Res. Lett. 2020, 47, e2019GL085497. [Google Scholar] [CrossRef]
- Pagiatakis, S.; Peidou, A. The Intriguing Structure of Stripes in GRACE Geopotential Models. Remote Sens. 2021, 13, 4362. [Google Scholar] [CrossRef]
- Kusche, J.; Schrama, E.J.O. Surface mass redistribution inversion from global GPS deformation and Gravity Recovery and Climate Experiment (GRACE) gravity data. J. Geophys. Res. Solid Earth 2005, 110. [Google Scholar] [CrossRef]
- Razeghi, M.; Han, S.C.; McClusky, S.; Sauber, J. A Joint Analysis of GPS Displacement and GRACE Geopotential Data for Simultaneous Estimation of Geocenter Motion and Gravitational Field. J. Geophys. Res. Solid Earth 2019, 124, 12241–12263. [Google Scholar] [CrossRef]
- Carlson, G.; Werth, S.; Shirzaei, M. Joint Inversion of GNSS and GRACE for Terrestrial Water Storage Change in California. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023135. [Google Scholar] [CrossRef] [PubMed]
- Weigelt, M.; van Dam, T.; Jäggi, A.; Prange, L.; Tourian, M.J.; Keller, W.; Sneeuw, N. Time-variable gravity signal in Greenland revealed by high-low satellite-to-satellite tracking. J. Geophys. Res. Solid Earth 2013, 118, 3848–3859. [Google Scholar] [CrossRef]
- Guo, X.; Ditmar, P.; Zhao, Q.; Xiao, Y. Improved recovery of temporal variations of the Earth’s gravity field from satellite kinematic orbits using an epoch-difference scheme. J. Geod. 2020, 94, 69. [Google Scholar] [CrossRef]
- Arnold, D.; Grombein, T.; Schreiter, L.; Sterken, V.; Jaggi, A. Reprocessed precise science orbits and gravity field recovery for the entire GOCE mission. J. Geod. 2023, 97, 67. [Google Scholar] [CrossRef] [PubMed]
- Teixeira da Encarnação, J.; Visser, P.; Arnold, D.; Bezdek, A.; Doornbos, E.; Ellmer, M.; Guo, J.; van den Ijssel, J.; Iorfida, E.; Jäggi, A.; et al. Description of the multi-approach gravity field models from Swarm GPS data. Earth Syst. Sci. Data 2020, 12, 1385–1417. [Google Scholar] [CrossRef]
- Zhang, C.; Shum, C.K.; Bezděk, A.; Bevis, M.; de Teixeira da Encarnação, J.; Tapley, B.D.; Zhang, Y.; Su, X.; Shen, Q. Rapid Mass Loss in West Antarctica Revealed by Swarm Gravimetry in the Absence of GRACE. Geophys. Res. Lett. 2021, 48, e2021GL095141. [Google Scholar] [CrossRef]
- Bezděk, A.; Sebera, J.; Teixeira da Encarnação, J.; Klokočník, J. Time-variable gravity fields derived from GPS tracking of Swarm. Geophys. J. Int. 2016, 205, 1665–1669. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q. A new approach to Earth’s gravity field modeling using GPS-derived kinematic orbits and baselines. Remote Sens. 2019, 11, 1728. [Google Scholar] [CrossRef]
- Jäggi, A.; Bock, H.; Meyer, U.; Beutler, G.; van den Ijssel, J. GOCE: Assessment of GPS-only gravity field determination. J. Geod. 2014, 89, 33–48. [Google Scholar] [CrossRef]
- Visser, P.N.A.M.; van der Wal, W.; Schrama, E.J.O.; van den Ijssel, J.; Bouman, J. Assessment of observing time-variable gravity from GOCE GPS and accelerometer observations. J. Geod. 2014, 88, 1029–1046. [Google Scholar] [CrossRef]
- Guo, X.; Ditmar, P.; Zhao, Q.; Klees, R.; Farahani, H.H. Earth’s gravity field modelling based on satellite accelerations derived from onboard GPS phase measurements. J. Geod. 2017, 91, 1049–1068. [Google Scholar] [CrossRef]
- Zehentner, N.; Mayer-Gürr, T. Precise orbit determination based on raw GPS measurements. J. Geod. 2015, 90, 275–286. [Google Scholar] [CrossRef]
- Farahani, H.H.; Ditmar, P.; Klees, R. Assessment of the added value of data from the GOCE satellite mission to time-varying gravity field modelling. J. Geod. 2014, 88, 157–178. [Google Scholar] [CrossRef]
- Rummel, R.; Yi, W.; Stummer, C. GOCE gravitational gradiometry. J. Geod. 2011, 85, 777–790. [Google Scholar] [CrossRef]
- Kvas, A.; Behzadpour, S.; Ellmer, M.; Klinger, B.; Strasser, S.; Zehentner, N.; Mayer-Gürr, T. ITSG-Grace2018: Overview and Evaluation of a New GRACE-Only Gravity Field Time Series. J. Geophys. Res. Solid Earth 2019, 124, 9332–9344. [Google Scholar] [CrossRef]
- Guo, X.; Geng, J.; Chen, X.; Zhao, Q. Enhanced orbit determination for formation-flying satellites through integrated single- and double-difference GPS ambiguity resolution. GPS Solut. 2020, 24, 14. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q. M-estimation-based robust and precise baseline determination for formation-flying satellites. GPS Solut. 2021, 25, 48. [Google Scholar] [CrossRef]
- Wang, C.; Guo, J.; Zhao, Q.; Ge, M. Improving the Orbits of the BDS-2 IGSO and MEO Satellites with Compensating Thermal Radiation Pressure Parameters. Remote Sens. 2022, 14, 641. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q. GRACE time-varying gravity field solutions based on PANDA software. Geod. Geodyn. 2018, 9, 162–168. [Google Scholar] [CrossRef]
- Guo, X.; Zhao, Q.; Ditmar, P.; Sun, Y.; Liu, J. Improvements in the monthly gravity field solutions through modeling the colored noise in the GRACE data. J. Geophys. Res. Solid Earth 2018, 123, 7040–7054. [Google Scholar] [CrossRef]
- Kvas, A.; Brockmann, J.M.; Krauss, S.; Schubert, T.; Gruber, T.; Meyer, U.; Mayer-Gürr, T.; Schuh, W.-D.; Jäggi, A.; Pail, R. GOCO06s—A satellite-only global gravity field model. Earth Syst. Sci. Data 2021, 13, 99–118. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. (Eds.) IERS Conventions (2010); Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Park, R.S.; Folkner, W.M.; Williams, J.G.; Boggs, D.H. The JPL Planetary and Lunar Ephemerides DE440 and DE441. Astron. J. 2021, 161, 105. [Google Scholar] [CrossRef]
- ESA. GOCE L1b Products User Handbook. Technical Note, GOCE-GSEG-EOPG-TN-06-0137, Issue 2, Revision 0. 2008. Available online: https://earth.esa.int/eogateway/documents/20142/37627/GOCE-Level-1b-Products-User-Handbook (accessed on 12 December 2023).
- Ditmar, P.; Klees, R.; Liu, X. Frequency-dependent data weighting in global gravity field modeling from satellite data contaminated by non-stationary noise. J. Geod. 2007, 81, 81–96. [Google Scholar] [CrossRef]
- Bouman, J.; Fiorot, S.; Fuchs, M.; Gruber, T.; Schrama, E.; Tscherning, C.; Veicherts, M.; Visser, P. GOCE gravitational gradients along the orbit. J. Geod. 2011, 85, 791–805. [Google Scholar] [CrossRef]
- Desai, S.D. Observing the pole tide with satellite altimetry. J. Geophys. Res. 2002, 107, 7-1–7-13. [Google Scholar] [CrossRef]
- Dobslaw, H.; Bergmann-Wolf, I.; Dill, R.; Poropat, L.; Thomas, M.; Dahle, C.; Esselborn, S.; König, R.; Flechtner, F. A new high-resolution model of non-tidal atmosphere and ocean mass variability for de-aliasing of satellite gravity observations: AOD1B RL06. Geophys. J. Int. 2017, 211, 263–269. [Google Scholar] [CrossRef]
- Kvas, A.; Mayer-Gürr, T. GRACE gravity field recovery with background model uncertainties. J. Geod. 2019, 93, 2543–2552. [Google Scholar] [CrossRef]
- Meyer, U.; Jean, Y.; Kvas, A.; Dahle, C.; Lemoine, J.M.; Jäggi, A. Combination of GRACE monthly gravity fields on the normal equation level. J. Geod. 2019, 93, 1645–1658. [Google Scholar] [CrossRef]
- Seo, K.W.; Wilson, C.R.; Han, S.C.; Waliser, D.E. Gravity Recovery and Climate Experiment (GRACE) alias error from ocean tides. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Cheng, M.; Ries, J. The unexpected signal in GRACE estimates of C20. J. Geod. 2017, 91, 897–914. [Google Scholar] [CrossRef]
- Cheng, M.; Tapley, B.D.; Ries, J.C. Deceleration in the Earth’s oblateness. J. Geophys. Res. Solid Earth 2013, 118, 740–747. [Google Scholar] [CrossRef]
- Loomis, B.D.; Rachlin, K.E.; Luthcke, S.B. Improved Earth Oblateness Rate Reveals Increased Ice Sheet Losses and Mass-Driven Sea Level Rise. Geophys. Res. Lett. 2019, 46, 6910–6917. [Google Scholar] [CrossRef]
- Sun, Y.; Riva, R.; Ditmar, P. Optimizing estimates of annual variations and trends in geocenter motion and J2 from a combination of GRACE data and geophysical models. J. Geophys. Res. Solid Earth 2016, 121, 8352–8370. [Google Scholar] [CrossRef]
- Sun, Y.; Li, Y.; Guo, X.; Guo, J. Estimating C30 coefficients for GRACE/GRACE-FO time-variable gravity field models using the GRACE-OBP approach. J. Geod. 2023, 97, 20. [Google Scholar] [CrossRef]
- Cheng, M.; Ries, J. C20 and C30 Variations from SLR for GRACE/GRACE-FO Science Applications. J. Geophys. Res. Solid Earth 2023, 128, e2022JB025459. [Google Scholar] [CrossRef]
- Wahr, J.; Molenaar, M.; Bryan, F. Time variability of the Earth’s gravity field: Hydrological and oceanic effects and their possible detection using GRACE. J. Geophys. Res. Solid Earth 1998, 103, 30205–30229. [Google Scholar] [CrossRef]
- Fecher, T.; Pail, R.; Gruber, T. GOCO05c: A New Combined Gravity Field Model Based on Full Normal Equations and Regionally Varying Weighting. Surv. Geophys. 2017, 38, 571–590. [Google Scholar] [CrossRef]
- Meyer, U.; Jäggi, A.; Beutler, G. Monthly gravity field solutions based on GRACE observations generated with the Celestial Mechanics Approach. Earth Planet. Sci. Lett. 2012, 345–348, 72–80. [Google Scholar] [CrossRef]
- Sun, Y.; Ditmar, P.; Riva, R. Statistically optimal estimation of degree-1 and C20 coefficients based on GRACE data and an ocean bottom pressure model. Geophys. J. Int. 2017, 210, 1305–1322. [Google Scholar] [CrossRef]
- Ditmar, P. Conversion of time-varying Stokes coefficients into mass anomalies at the Earth’s surface considering the Earth’s oblateness. J. Geod. 2018, 92, 1401–1412. [Google Scholar] [CrossRef] [PubMed]
- Tapley, B.D.; Watkins, M.M.; Flechtner, F.; Reigber, C.; Bettadpur, S.; Rodell, M.; Sasgen, I.; Famiglietti, J.S.; Landerer, F.W.; Chambers, D.P.; et al. Contributions of GRACE to understanding climate change. Nat. Clim. Chang. 2019, 5, 358–369. [Google Scholar] [CrossRef]
- Mayer-Gürr, T.; Behzadpur, S.; Ellmer, M.; Kvas, A.; Klinger, B.; Strasser, S.; Zehentner, N. ITSG-Grace2018—Monthly, Daily and Static Gravity Field Solutions from GRACE; GFZ Data Services: Potsdam, Germany, 2018. [Google Scholar] [CrossRef]
- Xavier, L.; Becker, M.; Cazenave, A.; Longuevergne, L.; Llovel, W.; Filho, O.C.R. Interannual variability in water storage over 2003–2008 in the Amazon Basin from GRACE space gravimetry, in situ river level and precipitation data. Remote Sens. Environ. 2010, 114, 1629–1637. [Google Scholar] [CrossRef]
- Chen, J.L.; Wilson, C.R.; Tapley, B.D. The 2009 exceptional Amazon flood and interannual terrestrial water storage change observed by GRACE. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Siemes, C.; Ditmar, P.; Riva, R.E.M.; Slobbe, D.C.; Liu, X.L.; Farahani, H.H. Estimation of mass change trends in the Earth’s system on the basis of GRACE satellite data, with application to Greenland. J. Geod. 2013, 87, 69–87. [Google Scholar] [CrossRef]
- Velicogna, I.; Wahr, J. Time-variable gravity observations of ice sheet mass balance: Precision and limitations of the GRACE satellite data. Geophys. Res. Lett. 2013, 40, 3055–3063. [Google Scholar] [CrossRef]
- Schrama, E.J.O.; Wouters, B.; Rietbroek, R. A mascon approach to assess ice sheet and glacier mass balances and their uncertainties from GRACE data. J. Geophys. Res. Solid Earth 2014, 119, 6048–6066. [Google Scholar] [CrossRef]
- Ran, J.; Ditmar, P.; Klees, R.; Farahani, H.H. Statistically optimal estimation of Greenland Ice Sheet mass variations from GRACE monthly solutions using an improved mascon approach. J. Geod. 2018, 92, 299–319. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, A.; Ivins, E.R.; Geruo, A.; Barletta, V.R.; Bentley, M.J.; Bettadpur, S.; Briggs, K.H.; Bromwich, D.H.; Forsberg, R.; Galin, N.; et al. A reconciled estimate of ice-sheet mass balance. Science 2012, 338, 1183–1189. [Google Scholar] [CrossRef] [PubMed]
- Müller Schmied, H.; Cáceres, D.; Eisner, S.; Flörke, M.; Herbert, C.; Niemann, C.; Peiris, T.A.; Popat, E.; Portmann, F.T.; Reinecke, R.; et al. The global water resources and use model WaterGAP v2.2d: Model description and evaluation. Geosci. Model Dev. 2021, 14, 1037–1079. [Google Scholar] [CrossRef]
- Oki, T.; Sud, Y.C. Design of Total Runoff Integrating Pathways (TRIP)—A global river channel network. Earth Interact. 1998, 2, 1–36. [Google Scholar] [CrossRef]
- Meyer, U.; Jäggi, A.; Beutler, G.; Bock, H. The impact of common versus separate estimation of orbit parameters on GRACE gravity field solutions. J. Geod. 2015, 89, 685–696. [Google Scholar] [CrossRef]


| Standard Deviation (10−10) | Correlation Coefficients | |||
|---|---|---|---|---|
| GRACE | GRACE/GOCE | GRACE | GRACE/GOCE | |
| SLR-TN14 | 0.69 | 0.68 | 0.92 | 0.75 |
| GRACE-OBP | 0.83 | 0.63 | 0.73 | 0.77 |
| Degree | GRACE | GRACE/GOCE | |
|---|---|---|---|
| 30 | 1.91 | 1.86 | −3% |
| 96 | 5.45 | 3.76 | −31% |
| GRACE | GRACE/GOCE | |||
|---|---|---|---|---|
| Ocean area | unfiltered | 143 | 93 | −34% |
| G150 | 35.1 | 22.0 | −37% | |
| G300 | 3.17 | 2.03 | −36% | |
| Sahara Desert | unfiltered | 109 | 76 | −30% |
| G150 | 29.0 | 17.7 | −39% | |
| G300 | 3.18 | 1.82 | −43% |
| GRACE | GRACE/GOCE | ||
|---|---|---|---|
| unfiltered | 0.46 | 0.47 | 2% |
| G150 | 0.56 | 0.63 | 13% |
| G300 | 1.76 | 2.03 | 15% |
| Amplitude (cm) | Phase (deg) | SNR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| GRACE | GRACE/GOCE | WGHM | GRACE | GRACE/GOCE | WGHM | GRACE | GRACE/GOCE | WGHM | |
| unfiltered | 21.6 ± 1.1 | 21.1 ± 0.9 | 17.5 ± 0.6 | −24.0 ± 3.2 | −22.8 ± 2.5 | −22.3 ± 2.3 | 3.6 | 4.6 | 5.0 |
| G150 | 21.2 ± 0.8 | 21.0 ± 0.8 | – | −23.0 ± 2.3 | −23.0 ± 2.2 | – | 5.0 | 5.2 | – |
| G300 | 20.4 ± 0.7 | 20.4 ± 0.7 | – | −23.2 ± 2.2 | −23.4 ± 2.2 | – | 5.3 | 5.3 | – |
| Correlation Coefficient | STD (cm) | |||
|---|---|---|---|---|
| GRACE | GRACE/GOCE | GRACE | GRACE/GOCE | |
| unfiltered | 0.985 | 0.971 | 4.7 | 3.7 |
| G150 | 0.991 | 0.991 | 3.2 | 3.1 |
| G300 | 0.992 | 0.992 | 2.6 | 2.6 |
| Trends (Gt/year) | SNR | |||
|---|---|---|---|---|
| GRACE | GRACE/GOCE | GRACE | GRACE/GOCE | |
| unfiltered | −350 ± 10.7 | −354 ± 9.8 | 11.4 | 12.4 |
| G150 | −300 ± 9.1 | −303 ± 8.8 | 11.3 | 11.9 |
| G300 | −252 ± 7.7 | −255 ± 7.6 | 11.3 | 11.6 |
| GRACE | GRACE/GOCE | ||
|---|---|---|---|
| unfiltered | 0.62 | 0.69 | 11% |
| G150 | 1.06 | 1.27 | 20% |
| G300 | 2.15 | 2.32 | 8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Lian, Y.; Sun, Y.; Zhou, H.; Luo, Z. Assessment of the Added Value of the GOCE GPS Data on the GRACE Monthly Gravity Field Solutions. Remote Sens. 2024, 16, 1586. https://doi.org/10.3390/rs16091586
Guo X, Lian Y, Sun Y, Zhou H, Luo Z. Assessment of the Added Value of the GOCE GPS Data on the GRACE Monthly Gravity Field Solutions. Remote Sensing. 2024; 16(9):1586. https://doi.org/10.3390/rs16091586
Chicago/Turabian StyleGuo, Xiang, Yidu Lian, Yu Sun, Hao Zhou, and Zhicai Luo. 2024. "Assessment of the Added Value of the GOCE GPS Data on the GRACE Monthly Gravity Field Solutions" Remote Sensing 16, no. 9: 1586. https://doi.org/10.3390/rs16091586
APA StyleGuo, X., Lian, Y., Sun, Y., Zhou, H., & Luo, Z. (2024). Assessment of the Added Value of the GOCE GPS Data on the GRACE Monthly Gravity Field Solutions. Remote Sensing, 16(9), 1586. https://doi.org/10.3390/rs16091586