

Maximum Likelihood Deconvolution of Beamforming Images with Signal-Dependent Speckle Fluctuations

Abstract
1. Introduction
- (1)
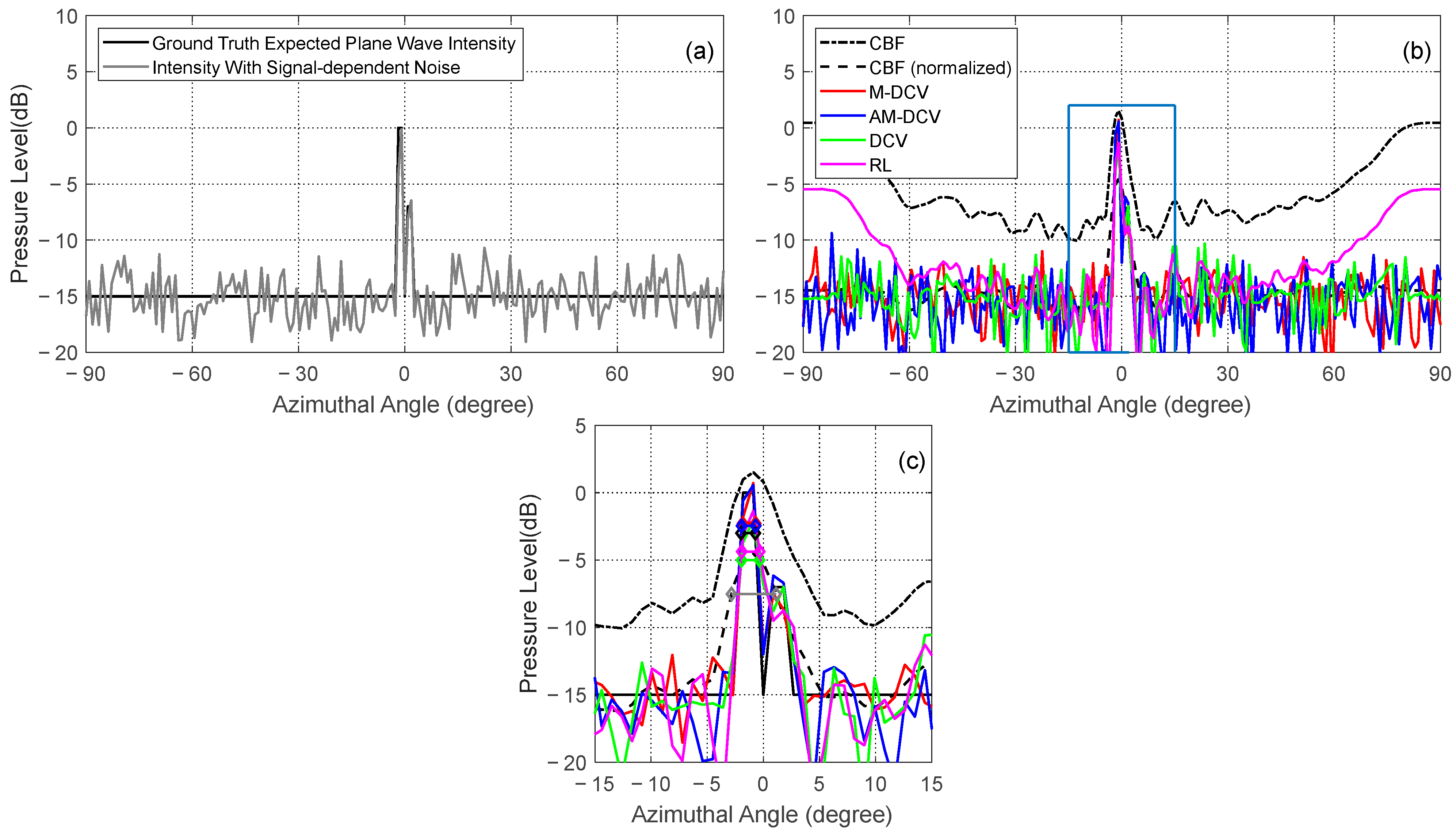
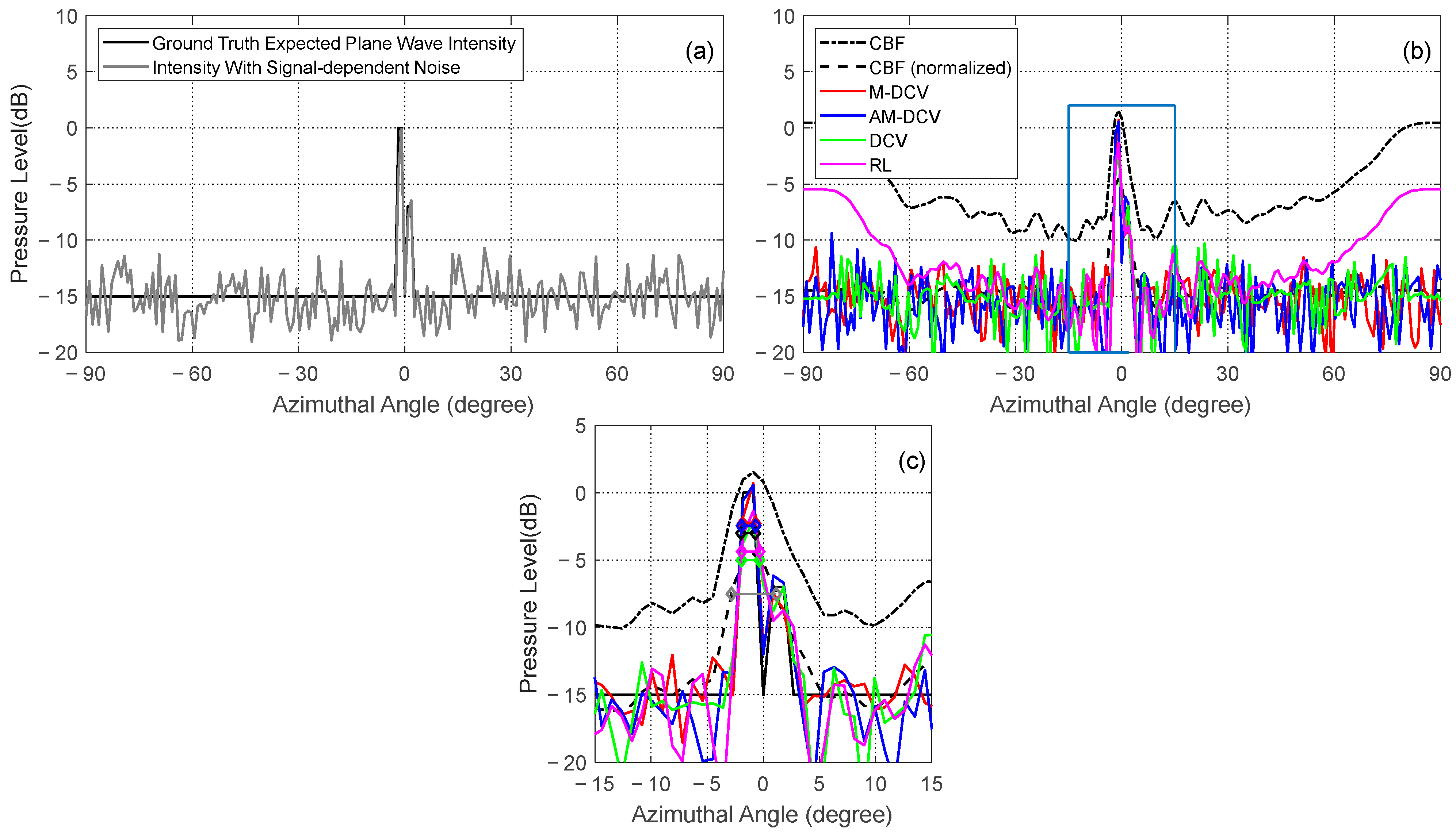
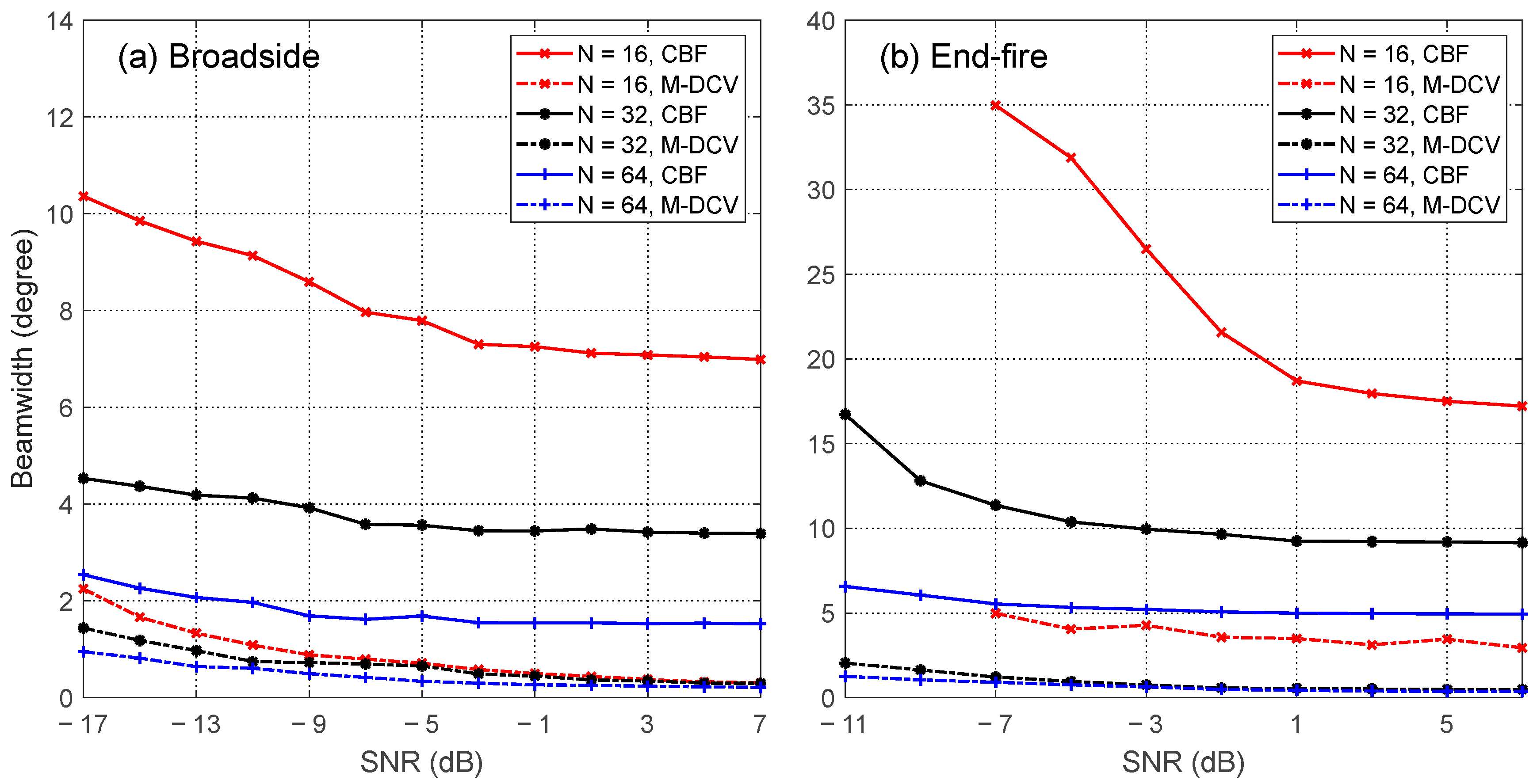
- The algorithms yield better angular resolution (up to 73%) and lower sidelobes (15 dB) compared with the CBF algorithm, depending on the width and incident angle of the features.
- (2)
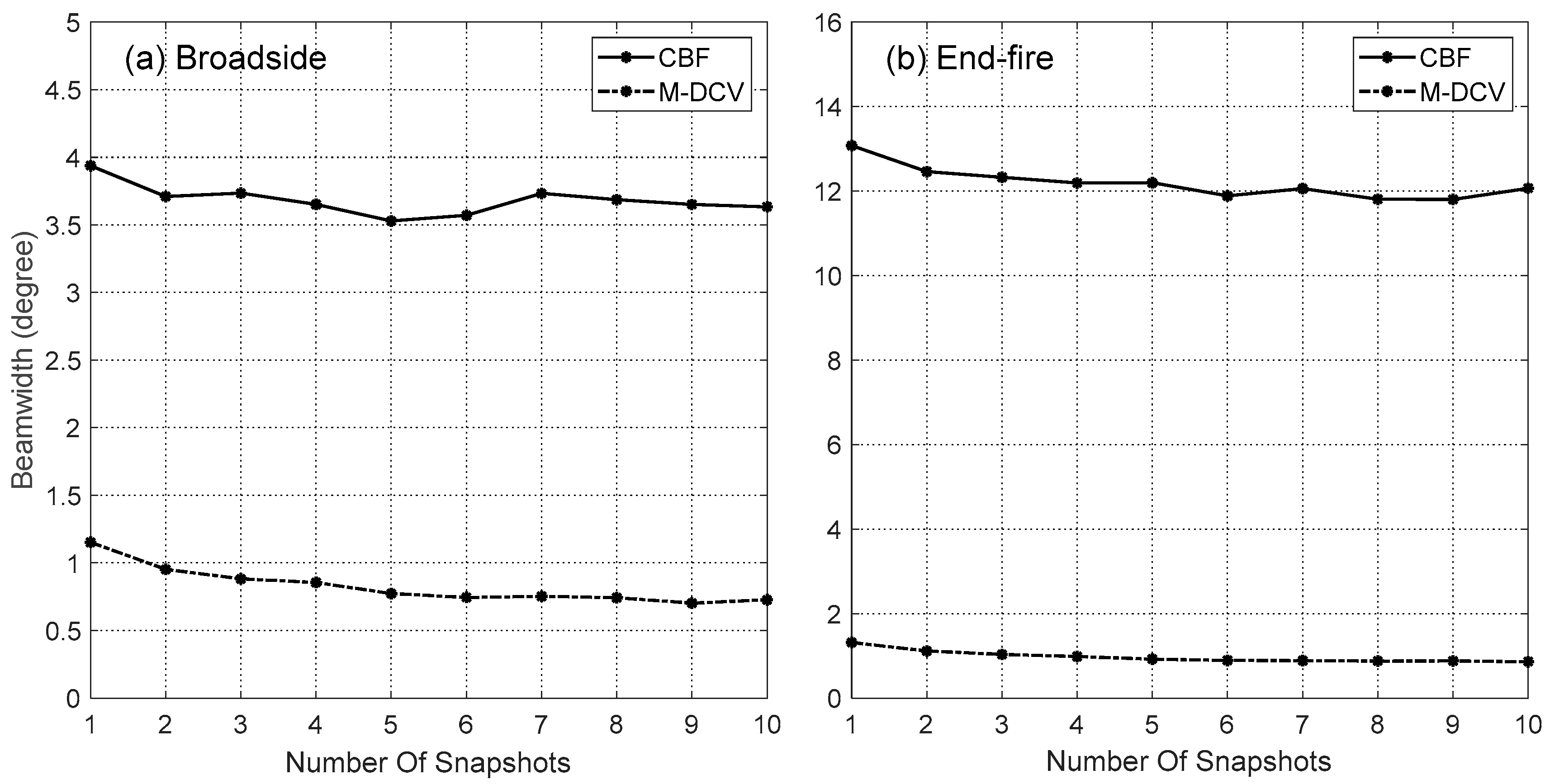
- The algorithms retain the advantages of the CBF algorithm in terms of robustness and the number of snapshots required for processing.
- (3)
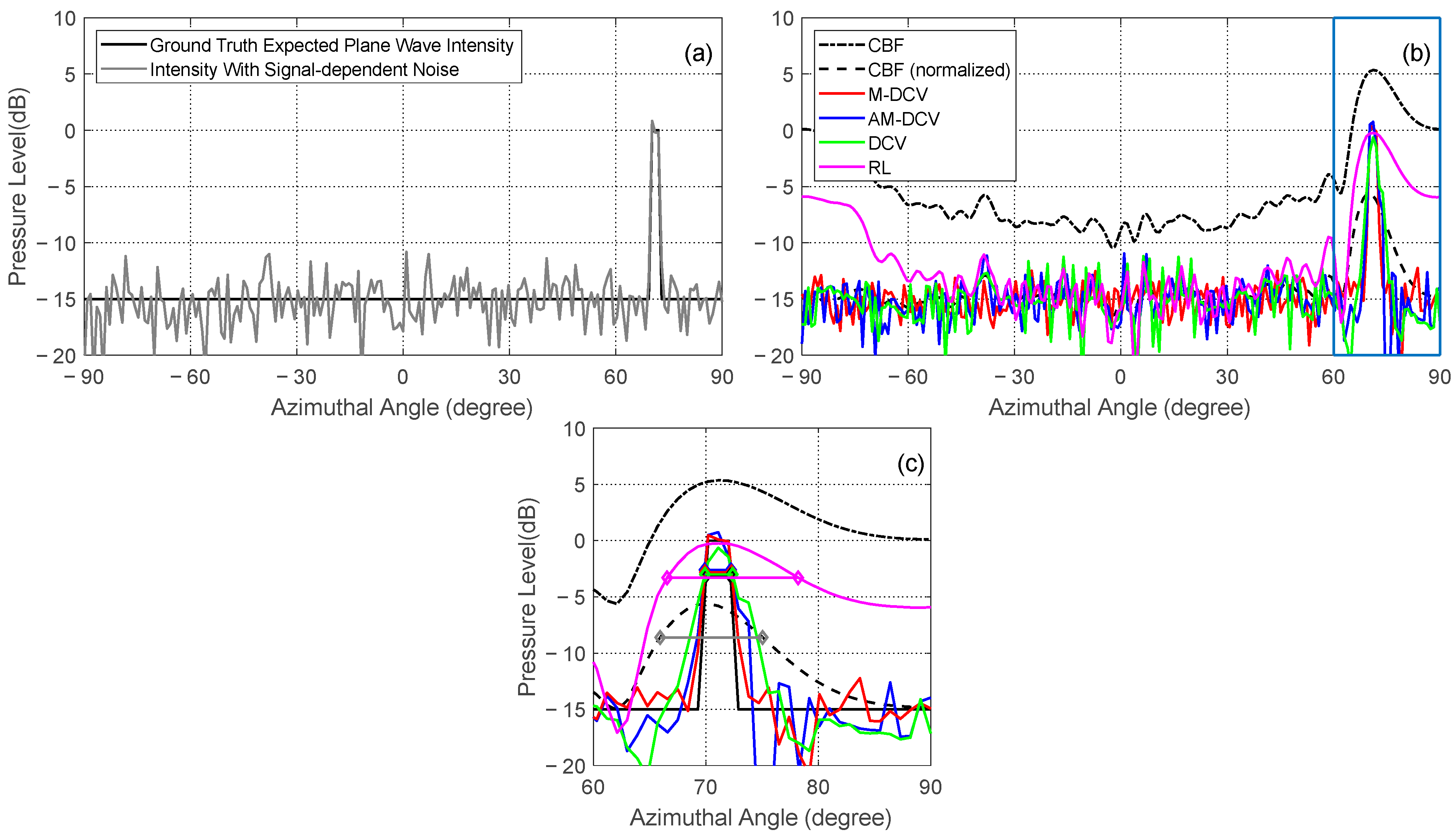
- The algorithms provide better estimation of intensity distribution compared with other deconvolution algorithms (DCV and RL), especially for targets close to the end-fire direction of the array.
- (4)
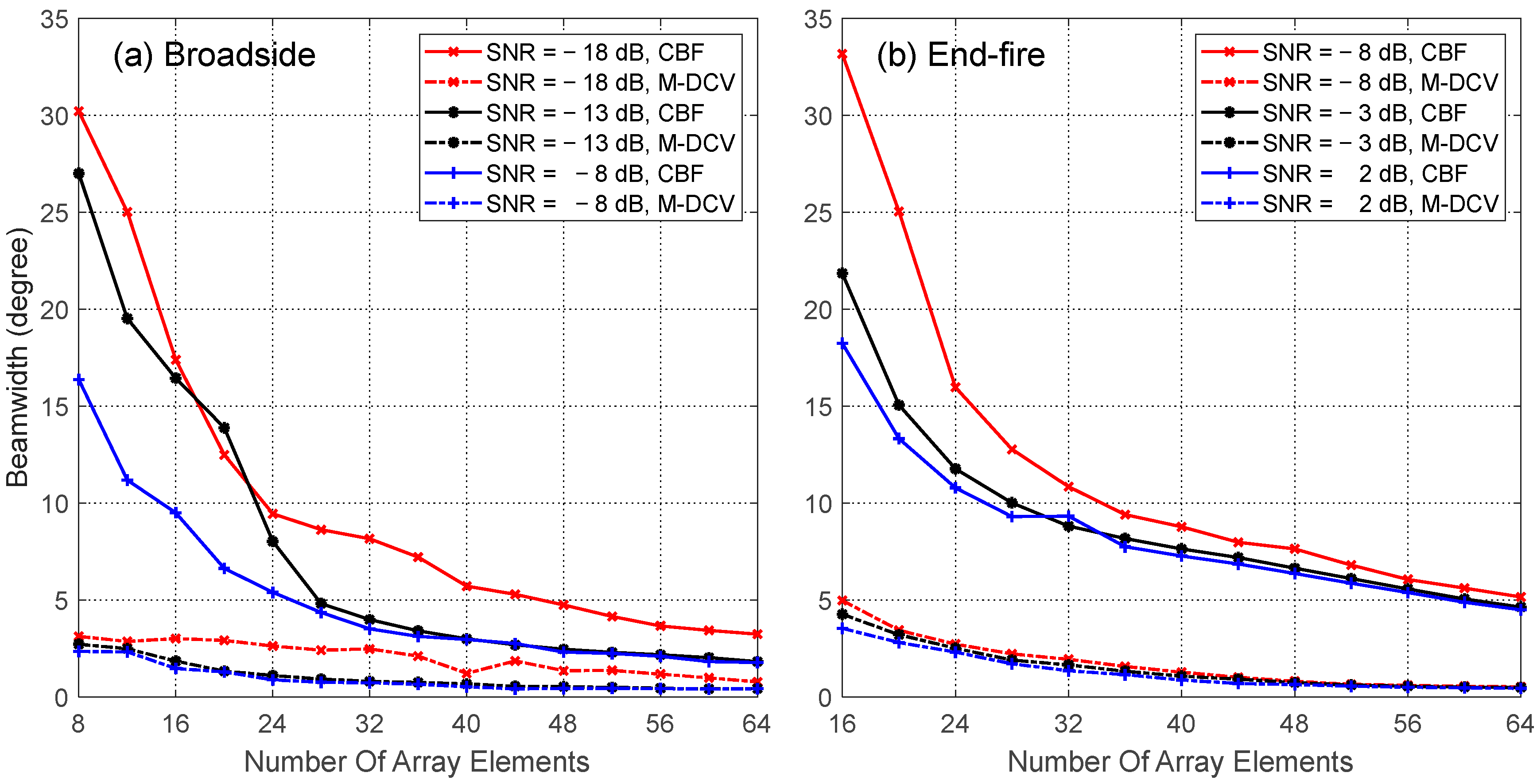
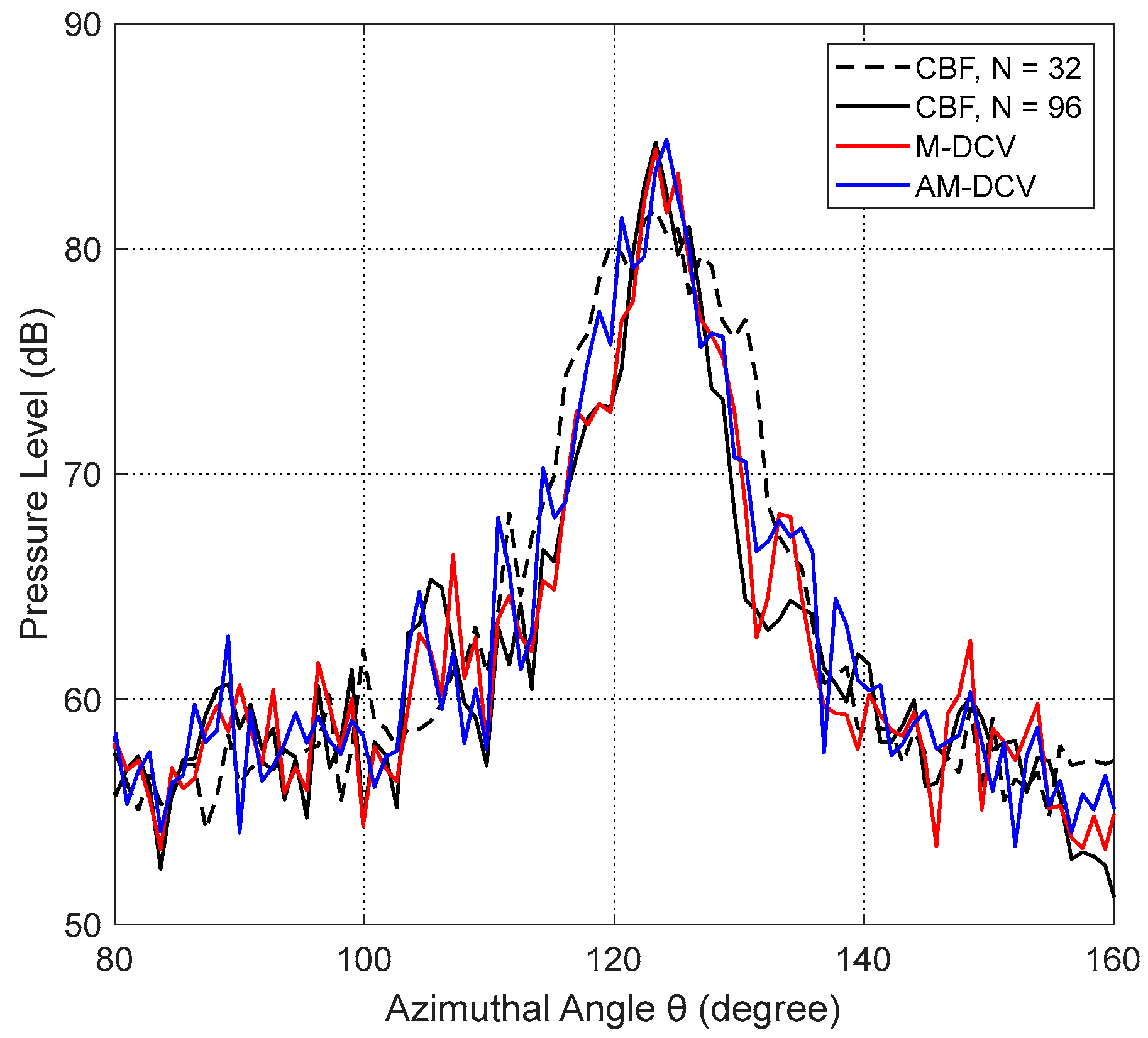
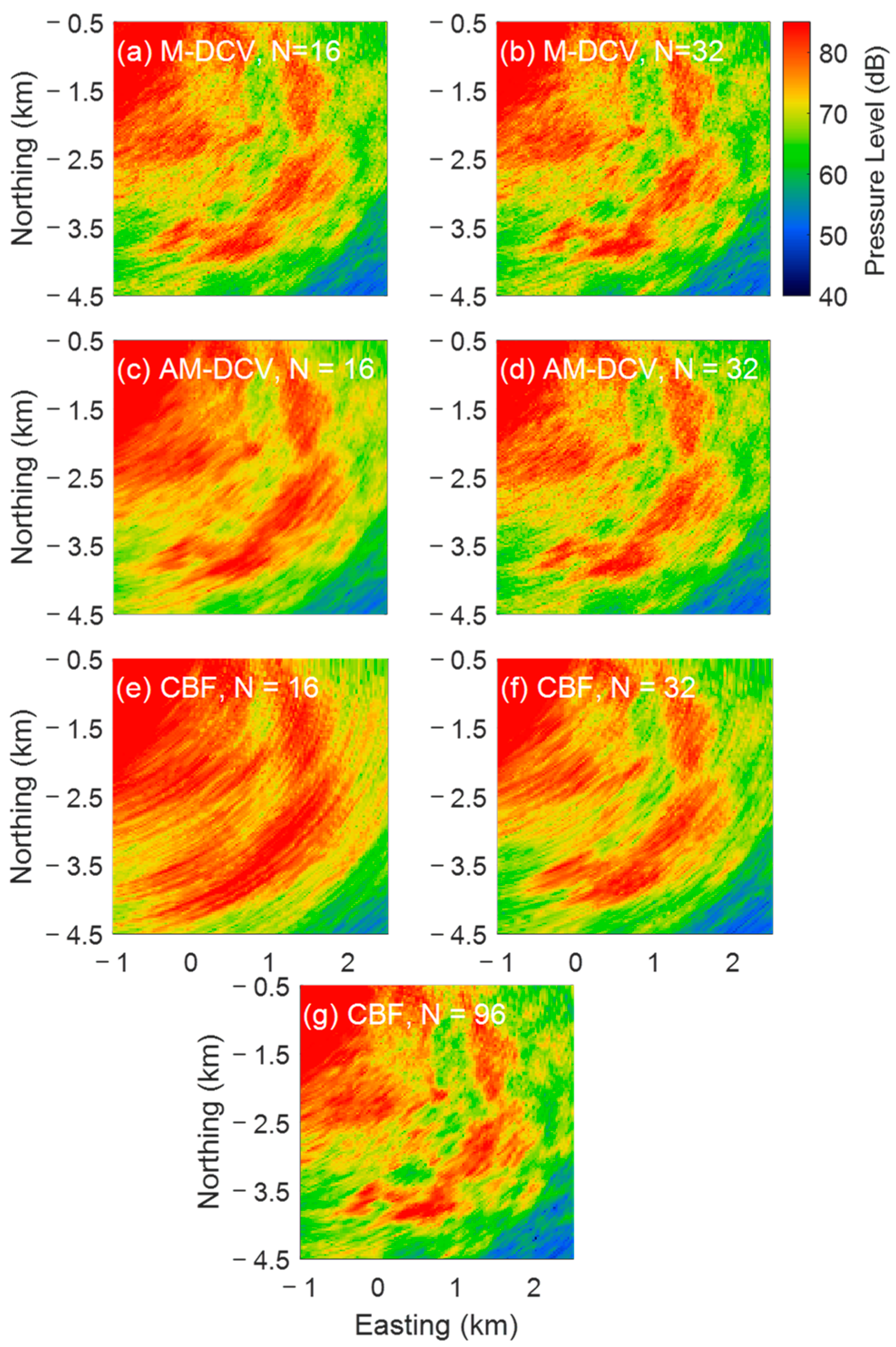
- The algorithms can significantly reduce the array aperture (~6 times smaller) and, at the same time, achieve performance outcomes comparable to those achieved using the CBF algorithm with large-aperture arrays.
2. Methods
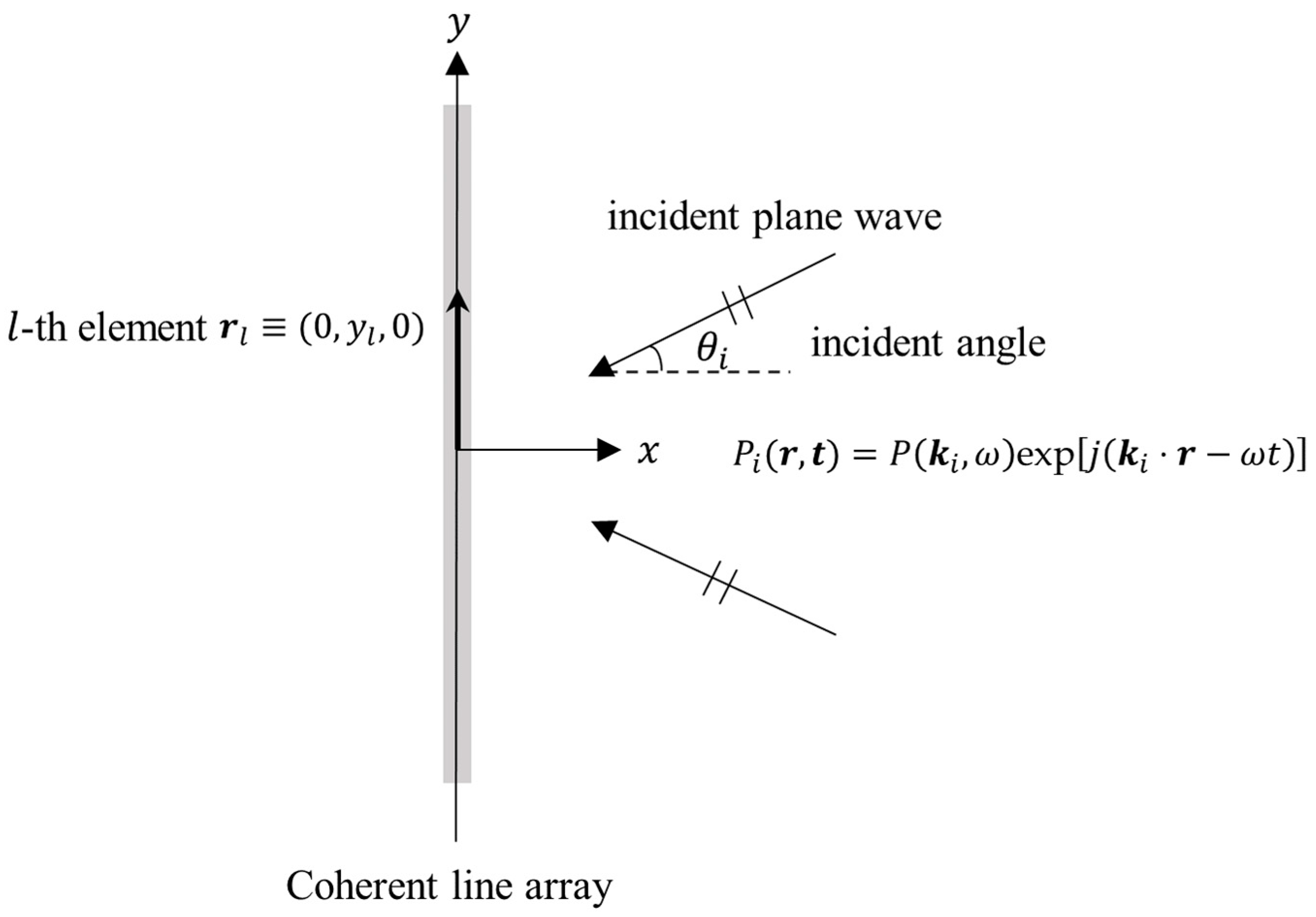
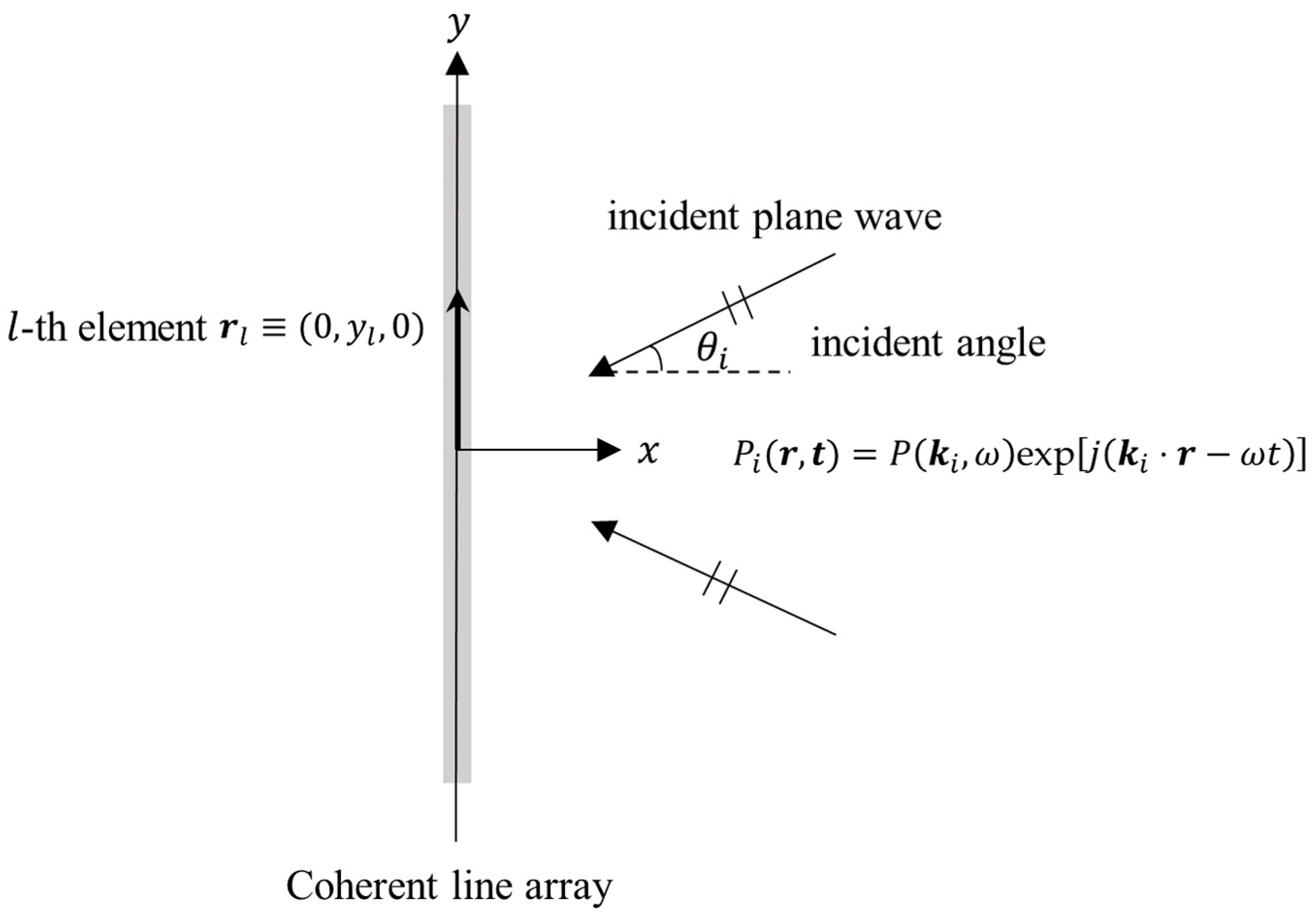
2.1. Beamformed Complex Pressure Amplitude on a Discrete Receiver Array
2.2. Modified Likelihood Model of Beamformed Intensity Given the Expected Incident Plane Wave Intensity
2.3. Approximate Likelihood Model of Beamformed Intensity Given the Expected Incident Plane Wave Intensity
2.4. Improvement in the Initial Intensity Distribution for Maximum Likelihood Estimation
3. Illustrative Examples
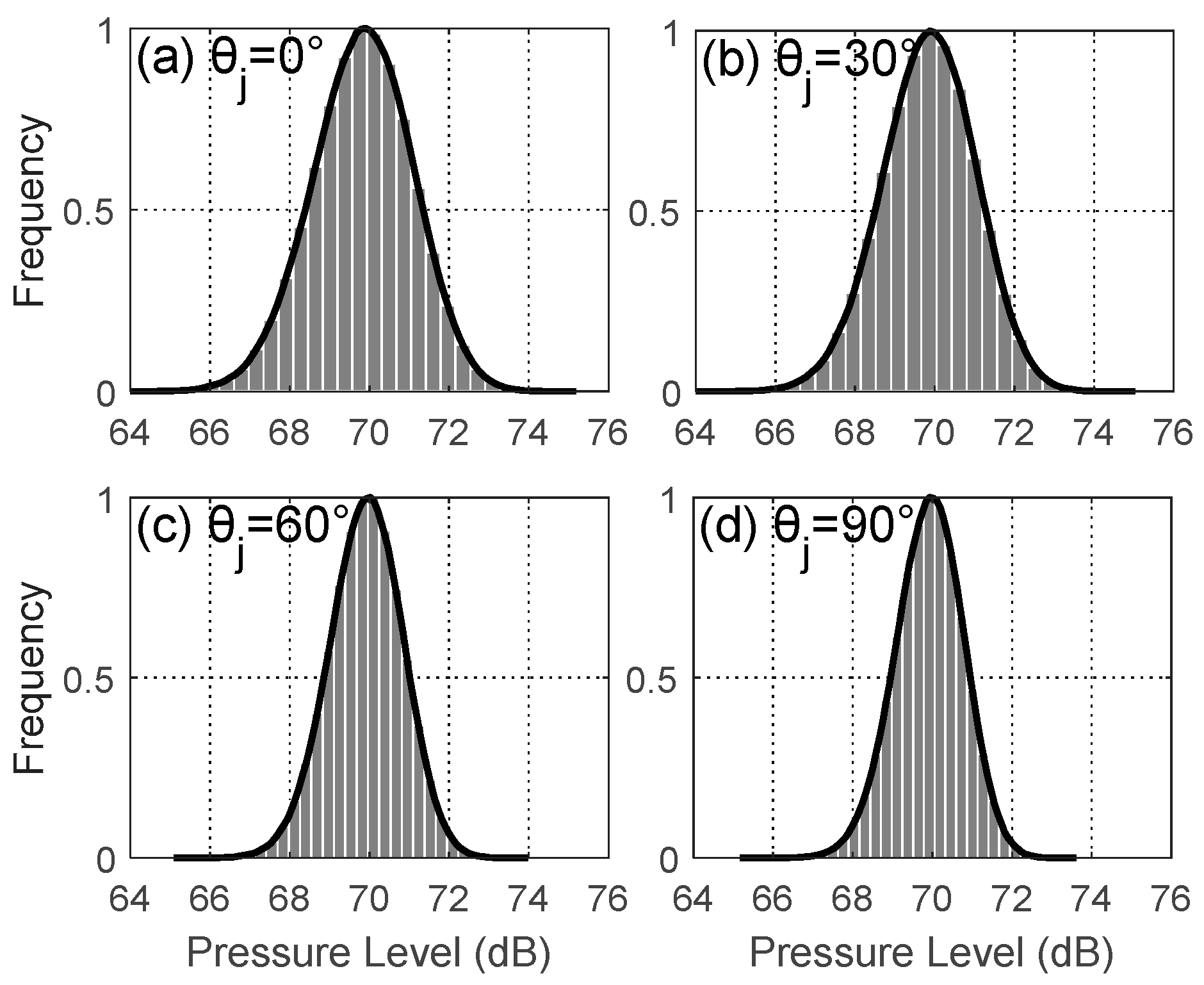
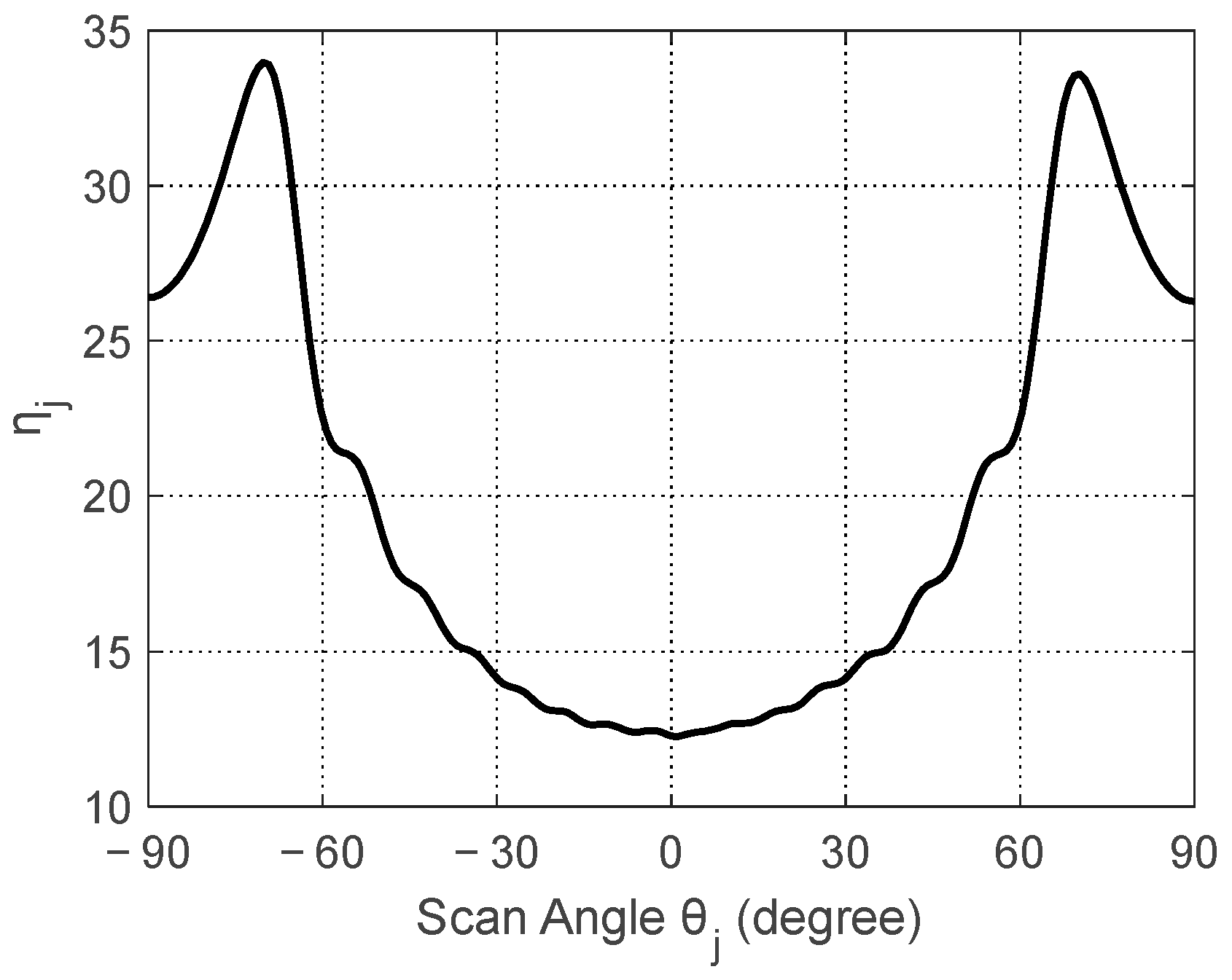
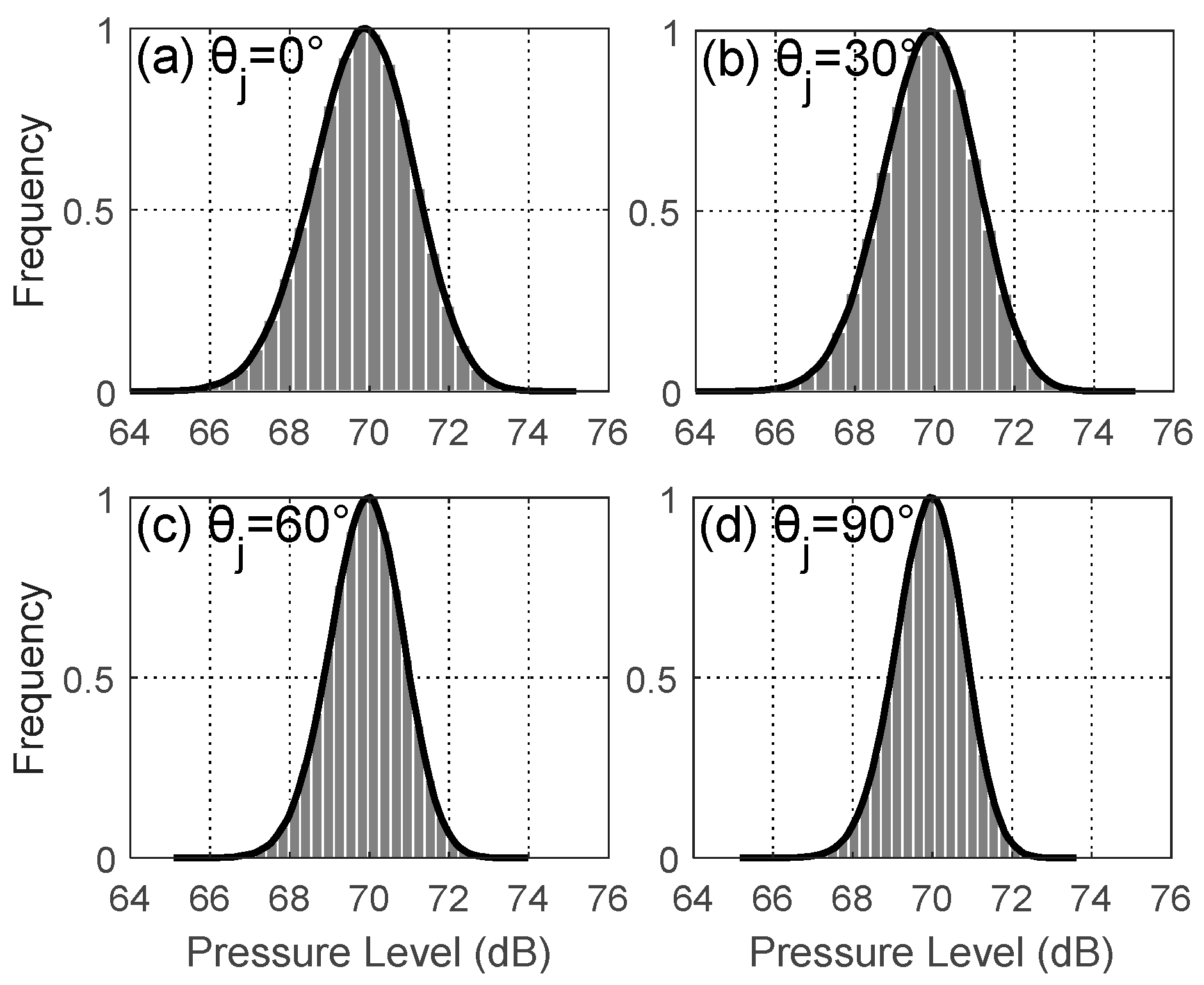
3.1. Conditional Probability Distribution of Conventional Beamforming Output of the Ambient Noise
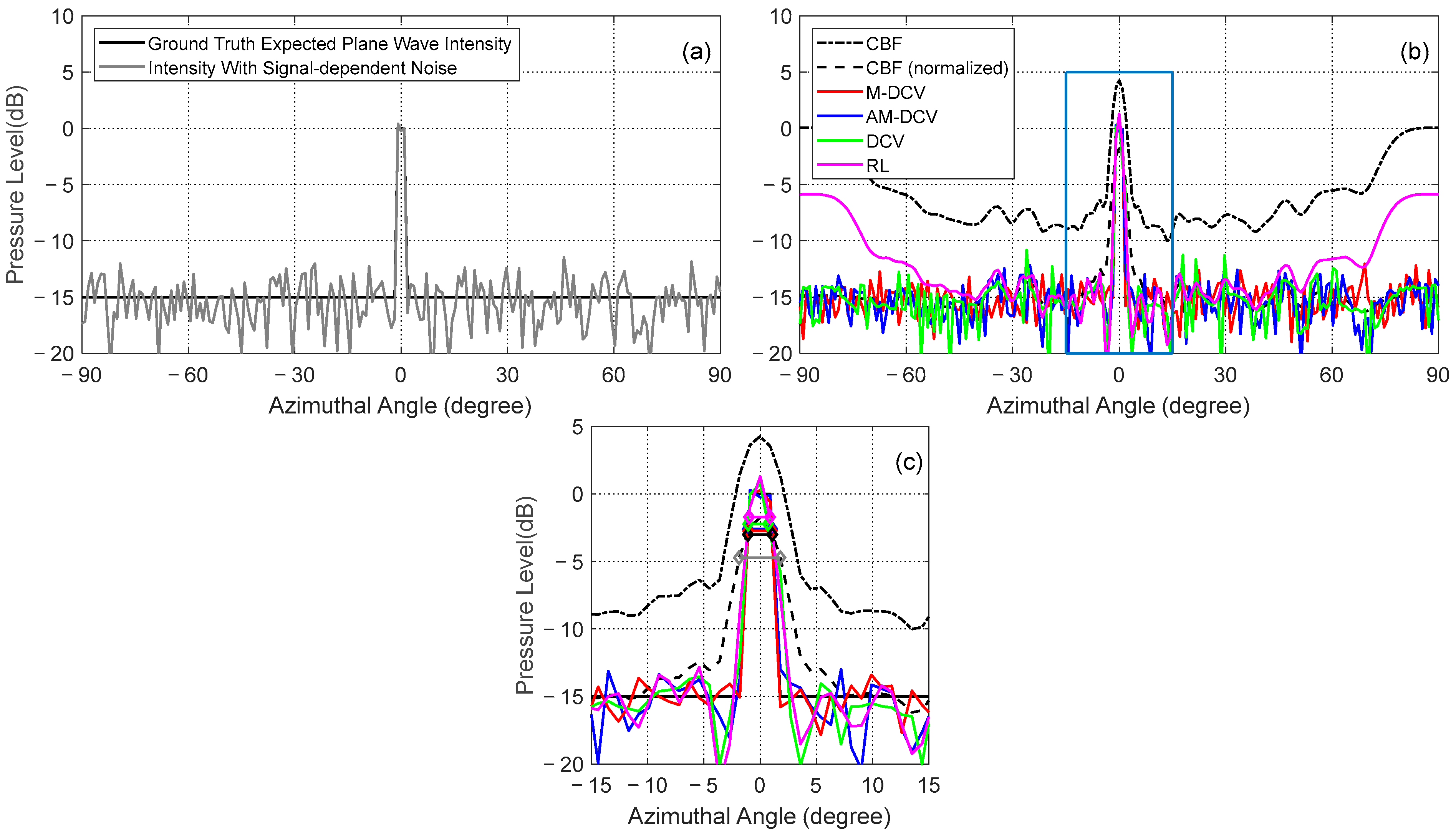
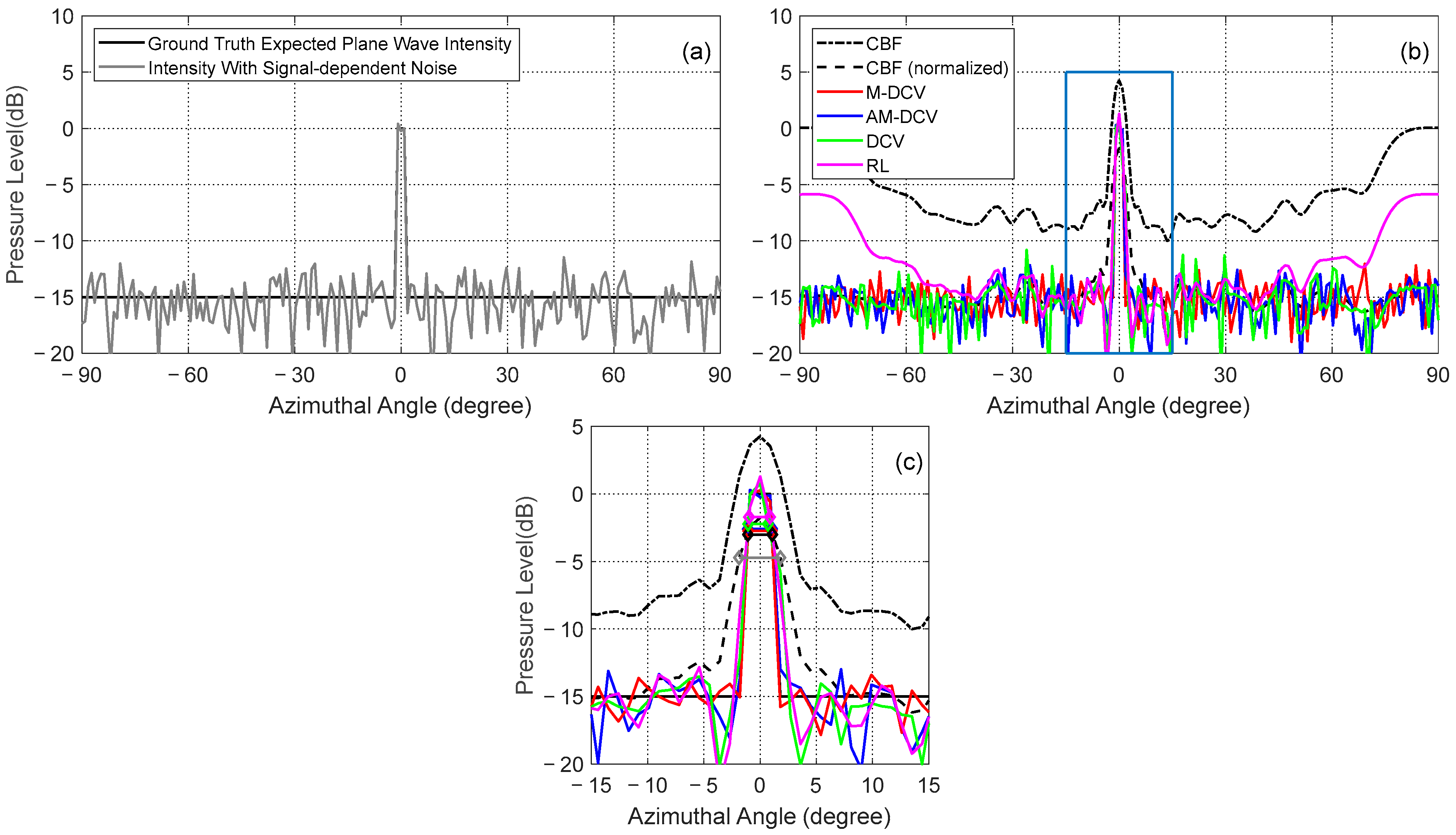
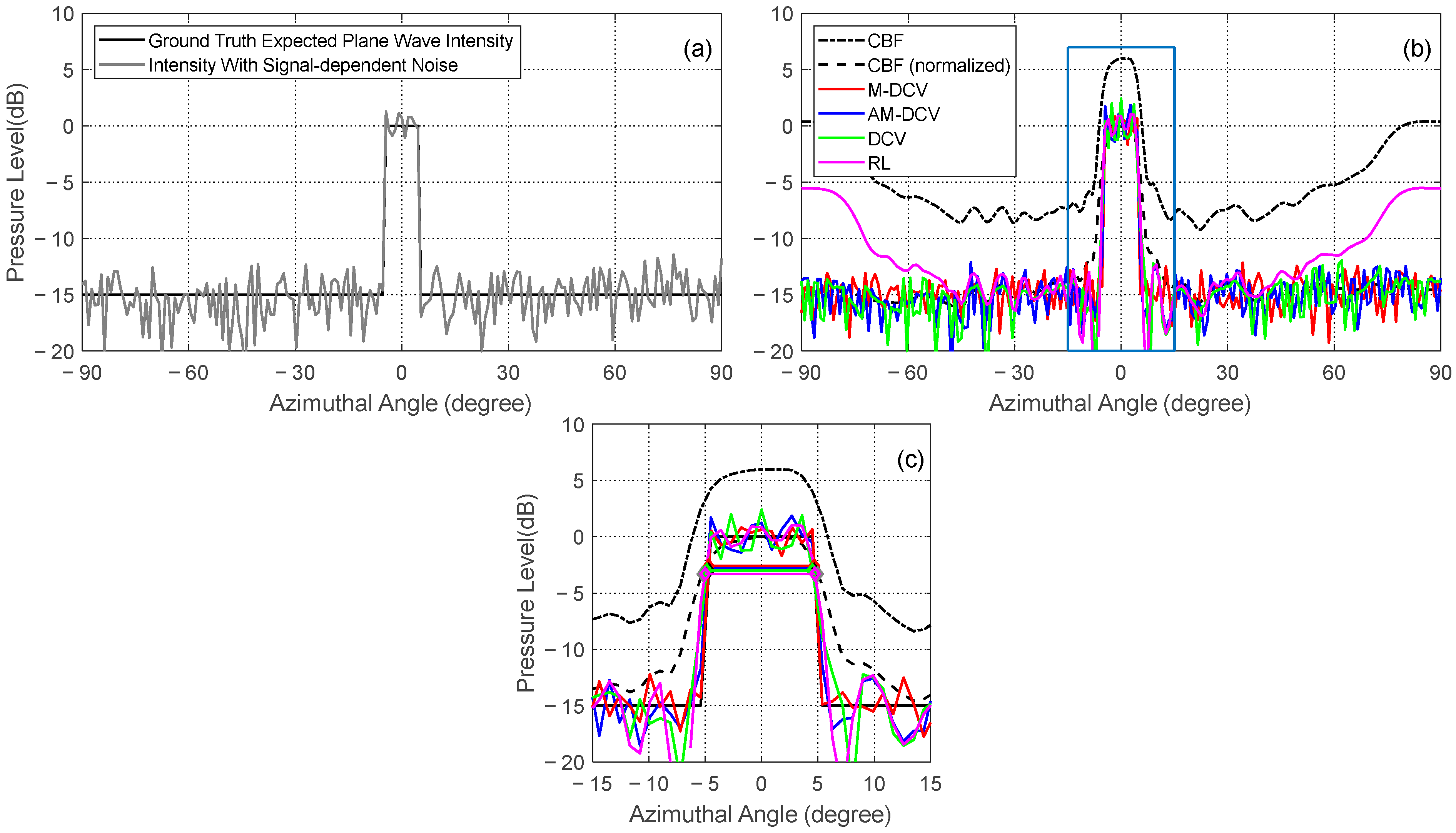
3.2. Simulation Data Results
3.3. Field Experiment Data Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Urick, R.J. Principles of Underwater Sound; McGraw Hill: New York, NY, USA, 1983. [Google Scholar]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory, Part I; Wiley-Interscience: New York, NY, USA, 2001. [Google Scholar]
- Van Trees, H.L. Optimum Array Processing; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Makris, N.; Ratilal, P.; Jagannathan, S.; Gong, Z.; Andrews, M.; Bertsatos, I.; Godø, O.; Nero, R.; Jech, J. Critical Population Density Triggers Rapid Formation of Vast Oceanic Fish Shoals. Science 2009, 323, 1734–1737. [Google Scholar] [CrossRef]
- Makris, N.C.; Ratilal, P.; Symonds, D.T.; Jagannathan, S.; Lee, S.; Nero, R.W. Fish population and behavior revealed by instantaneous continental shelf-scale imaging. Science 2006, 311, 660–663. [Google Scholar] [CrossRef]
- Wang, D.; Garcia, H.; Huang, W.; Tran, D.D.; Jain, A.D.; Yi, D.H.; Gong, Z.; Jech, J.M.; Godø, O.R.; Makris, N.C.; et al. Vast assembly of vocal marine mammals from diverse species on fish spawning ground. Nature 2016, 531, 366–370. [Google Scholar] [CrossRef]
- Huang, W.; Wang, D.; Ratilal, P. Diel and Spatial Dependence of Humpback Song and Non-Song Vocalizations in Fish Spawning Ground. Remote Sens. 2016, 8, 712. [Google Scholar] [CrossRef]
- Makris, N. Imaging ocean-basin reverberation via inversion. J. Acoust. Soc. Am. 1993, 94, 983–993. [Google Scholar] [CrossRef]
- Swee, C.; Makris, N.; Fialkowski, L. A comparison of bistatic scattering from two geologically distinct abyssal hills. J. Acoust. Soc. Am. 2000, 108, 2053–2070. [Google Scholar] [CrossRef] [PubMed]
- Ratilal, P.; Lai, Y.; Symonds, D.; Ruhlmann, L.; Preston, J.; Scheer, E.; Garr, M.; Holland, C.; Goff, J.; Makris, N. Long range acoustic imaging of the continental shelf environment: The Acoustic Clutter Reconnaissance Experiment 2001. J. Acoust. Soc. Am. 2005, 117, 1977–1998. [Google Scholar] [CrossRef]
- Capon, J. High-Resolution Frequency-Wavenumber Spectrum Analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple Emitter Location and Signal Parameter Estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Zeng, W.; So, H.C.; Huang, L. ℓp-MUSIC: Robust Direction-of-Arrival Estimator for Impulsive Noise Environments. IEEE Trans. Signal Process. 2013, 61, 4296–4308. [Google Scholar]
- He, Z.; Liu, Q.; Jin, L.; Ouyang, S. Low complexity method for DOA estimation using array covariance matrix sparse representation. Electron. Lett. 2013, 49, 228–230. [Google Scholar] [CrossRef]
- Abraham, D.; Owsley, N. Beamforming with Dominant Mode Rejection. In Proceedings of the IEEE OCEANS ′90. Engineering in the Ocean Environment, Washington, DC, USA, 24–26 September 1990; pp. 470–475. [Google Scholar]
- Ying, D.; Yan, Y. Robust and Fast Localization of Single Speech Source Using a Planar Array. IEEE Signal Process. Lett. 2013, 20, 909–913. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A. Sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef]
- Tropp, J.; Gilbert, A. Signal Recovery from Random Measurements via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2008, 53, 4655–4666. [Google Scholar] [CrossRef]
- Sahoo, S.; Makur, A. Signal Recovery from Random Measurements via Extended Orthogonal Matching Pursuit. IEEE Trans. Signal Process. 2015, 63, 2572–2581. [Google Scholar] [CrossRef]
- Chang, L.; Wu, J. An Improved RIP-Based Performance Guarantee for Sparse Signal Recovery via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2014, 60, 5702–5715. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L. Continuous Compressed Sensing with a Single or Multiple Measurement Vectors. In Proceedings of the 2014 IEEE Workshop on Statistical Signal Processing (SSP), Gold Coast, QLD, Australia, 29 June–2 July 2014. [Google Scholar]
- Yang, Z.; Xie, L. On gridless sparse methods for multi-snapshot DOA estimation. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016. [Google Scholar]
- Yang, Z.; Xie, L. Enhancing Sparsity and Resolution via Reweighted Atomic Norm Minimization. IEEE Trans. Signal Process. 2016, 64, 995–1006. [Google Scholar] [CrossRef]
- Berger, C.; Zhou, S.; Preisig, J.; Willett, P. Sparse Channel Estimation for Multicarrier Underwater Acoustic Communication: From Subspace Methods to Compressed Sensing. IEEE Trans. Signal Process. 2010, 58, 1708–1721. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, H.; Xu, F.; Wang, D. OFDM Transform-domain Channel Estimation Based on MMSE for Underwater Acoustic Channels. In Proceedings of the 2008 2nd International Conference on Anti-Counterfeiting, Security and Identification, Guiyang, China, 20–23 August 2008; pp. 177–181. [Google Scholar]
- Liu, S.; Zuberi, H.; Lou, Y.; Farooq, B.; Shaikh, S.; Raza, W. M-ary nonlinear sine chirp spread spectrum for underwater acoustic communication based on virtual time-reversal mirror method. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 112. [Google Scholar] [CrossRef]
- Berger, C.; Wang, Z.; Huang, J.; Zhou, S. Application of compressive sensing to sparse channel estimation. IEEE Commun. Mag. 2010, 48, 164–174. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, Q.; Gan, W.; Qiao, G.; Bilal, M. Adaptive Joint Channel Estimation of Digital Self-Interference Cancelation in Co-time Co-frequency Full-Duplex Underwater Acoustic Communication. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–5. [Google Scholar]
- Zuberi, H.; Liu, S.; Bilal, M.; Alharbi, A.; Jaffar, A.; Mohsan, S.A.H.; Miyajan, A.; Khan, M. Deep-Neural-Network-Based Receiver Design for Downlink Non-Orthogonal Multiple-Access Underwater Acoustic Communication. J. Mar. Sci. Eng. 2023, 11, 2184. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, Y.; Zhou, F.; Zhao, Y.; Mazhar, S.; Yang, G. Deep learning-based M-ary spread spectrum communication system in shallow water acoustic channel. Appl. Acoust. 2022, 192, 108742. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, C.; Wang, H.; Wang, J.; Yang, F.; Meriaudeau, F. Deep learning aided OFDM receiver for underwater acoustic communications. Appl. Acoust. 2022, 187, 108515. [Google Scholar] [CrossRef]
- Yang, T. Deconvolved Conventional Beamforming for a Horizontal Line Array. IEEE J. Ocean. Eng. 2017, 43, 160–172. [Google Scholar] [CrossRef]
- Yang, T. Deconvolution of decomposed conventional beamforming. J. Acoust. Soc. Am. 2020, 148, 195–201. [Google Scholar] [CrossRef] [PubMed]
- Ratnam, M.; Anand, V.; Rosen, J. Non-linear adaptive three-dimensional imaging with interferenceless coded aperture correlation holography (I-COACH). Opt. Express 2018, 26, 18143–18154. [Google Scholar]
- Anand, V.; Han, M.; Maksimovic, J.; Ng, S.H.; Katkus, T.; Klein, A.; Bambery, K.; Tobin, M.; Vongsvivut, J.; Juodkazis, S. Single-shot mid-infrared incoherent holography using Lucy-Richardson-Rosen algorithm. Opto-Electron. Sci. 2022, 1, 210006. [Google Scholar]
- Gopinath, S.; Praveen, P.A.; Kahro, T.; Bleahu, A.-I.; Arockiaraj, F.; Smith, D.; Ng, S.H.; Tamm, A.; Kukli, K.; Juodkazis, S.; et al. Implementation of a Large-Area Diffractive Lens Using Multiple Sub-Aperture Diffractive Lenses and Computational Reconstruction. Photonics 2022, 10, 3. [Google Scholar] [CrossRef]
- Jain, A.; Makris, N. Maximum Likelihood Deconvolution of Beamformed Images with Signal-Dependent Speckle Fluctuations from Gaussian Random Fields: With Application to Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sens. 2016, 8, 694. [Google Scholar] [CrossRef]
- Makris, N. The effect of saturated transmission scintillation on ocean acoustic intensity measurements. J. Acoust. Soc. Am. 1996, 100, 769–783. [Google Scholar] [CrossRef]
- Makris, N. Parameter resolution bounds that depend on sample size. J. Acoust. Soc. Am. 1996, 99, 2851–2861. [Google Scholar] [CrossRef]
- Jagannathan, S.; Küsel, E.; Ratilal, P.; Makris, N. Scattering from extended targets in range-dependent fluctuating ocean-waveguides with clutter from theory and experiments. J. Acoust. Soc. Am. 2012, 132, 680–693. [Google Scholar] [CrossRef] [PubMed]
- Tran, D.; Ratilal, P. Probability distribution for energy of saturated broadband ocean acoustic transmission: Results from Gulf of Maine 2006 experiment. J. Acoust. Soc. Am. 2013, 133, 3346. [Google Scholar] [CrossRef]
- Goodman, J.W. Statistical Optics; Wiley-Interscience: New York, NY, USA, 1985. [Google Scholar]
- Kelley, C. Iterative Methods for Optimization; Society for Industrial & Applied Mathematics (SIAM): Philadelphia, PA, USA, 1999; Volume 18. [Google Scholar]
- Wang, D.; Ratilal, P. Angular Resolution Enhancement Provided by Nonuniformly-Spaced Linear Hydrophone Arrays in Ocean Acoustic Waveguide Remote Sensing. Remote Sens. 2017, 9, 1036. [Google Scholar] [CrossRef]
- Makris, N. A foundation for logarithmic measures of fluctuating intensity in pattern recognition. Opt. Lett. 1995, 20, 2012–2014. [Google Scholar] [CrossRef] [PubMed]
- Diaconis, P.; Perlman, M. Bounds for tail probabilities of weighted sums of independent gamma random variables. Lect. Notes-Monogr. Ser. 1990, 16, 147–166. [Google Scholar]
- Mathai, A. Storage capacity of a dam with gamma type inputs. Ann. Inst. Stat. Math. 1982, 34, 591–597. [Google Scholar] [CrossRef]
- Moschopoulos, P. The Distribution of the Sum of Independent Gamma Random Variables. Ann. Inst. Stat. Math. 1985, 37, 541–544. [Google Scholar] [CrossRef]
- Akkouchi, M. On the convolution of gamma distributions. Soochow J. Math. 2005, 31, 205–211. [Google Scholar]
- Murakami, H. Approximations to the distribution of sum of independent non-identically gamma random variables. Math. Sci. 2015, 9, 205–213. [Google Scholar] [CrossRef]
- Barnabani, M. An approximation to the convolution of Gamma Distributions. Commun. Stat. Simul. Comput. 2015, 46, 331–343. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, T.; Xu, W.; Zhao, H. A Linear Near-Field Interference Cancellation Method Based on Deconvolved Conventional Beamformer Using Fresnel Approximation. IEEE J. Ocean. Eng. A J. Devoted Appl. Electr. Electron. Eng. Ocean. Environ. 2023, 48, 365–371. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location/Feature Type | M-DCV | AM-DCV |
|---|---|---|
| Broadside/narrow | 7.17 s | 0.11 s |
| Broadside/wide | 7.21 s | 0.31 s |
| End-fire/narrow | 7.18 s | 0.12 s |
| End-fire/wide | 7.22 s | 0.33 s |
| Broadside/adjacent | 7.16 s | 0.11 s |
| Location/Feature Type | DCV | M-DCV |
|---|---|---|
| Broadside/narrow | 784 | 198 |
| Broadside/wide | 875 | 231 |
| End-fire/narrow | 765 | 203 |
| End-fire/wide | 837 | 229 |
| Broadside/adjacent | 796 | 212 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Ping, X.; Li, L.; Wang, D. Maximum Likelihood Deconvolution of Beamforming Images with Signal-Dependent Speckle Fluctuations. Remote Sens. 2024, 16, 1506. https://doi.org/10.3390/rs16091506
Zheng Y, Ping X, Li L, Wang D. Maximum Likelihood Deconvolution of Beamforming Images with Signal-Dependent Speckle Fluctuations. Remote Sensing. 2024; 16(9):1506. https://doi.org/10.3390/rs16091506
Chicago/Turabian StyleZheng, Yuchen, Xiaobin Ping, Lingxuan Li, and Delin Wang. 2024. "Maximum Likelihood Deconvolution of Beamforming Images with Signal-Dependent Speckle Fluctuations" Remote Sensing 16, no. 9: 1506. https://doi.org/10.3390/rs16091506
APA StyleZheng, Y., Ping, X., Li, L., & Wang, D. (2024). Maximum Likelihood Deconvolution of Beamforming Images with Signal-Dependent Speckle Fluctuations. Remote Sensing, 16(9), 1506. https://doi.org/10.3390/rs16091506