


Radar Signal Classification with Multi-Frequency Multi-Scale Deformable Convolutional Networks and Attention Mechanisms
Abstract
1. Introduction
- Utilizing an S-band phased-array full-domain LSS radar detection system, with a sampling rate of 20 MHz and a pulse repetition time (PRT) of 115 microseconds, extensive field collection was conducted. The relevant classification target data were verified one by one through optoelectronic devices to confirm the authenticity and accuracy of the targets, thus forming the foundational dataset for the LSS target detection verification experiment presented in this paper.
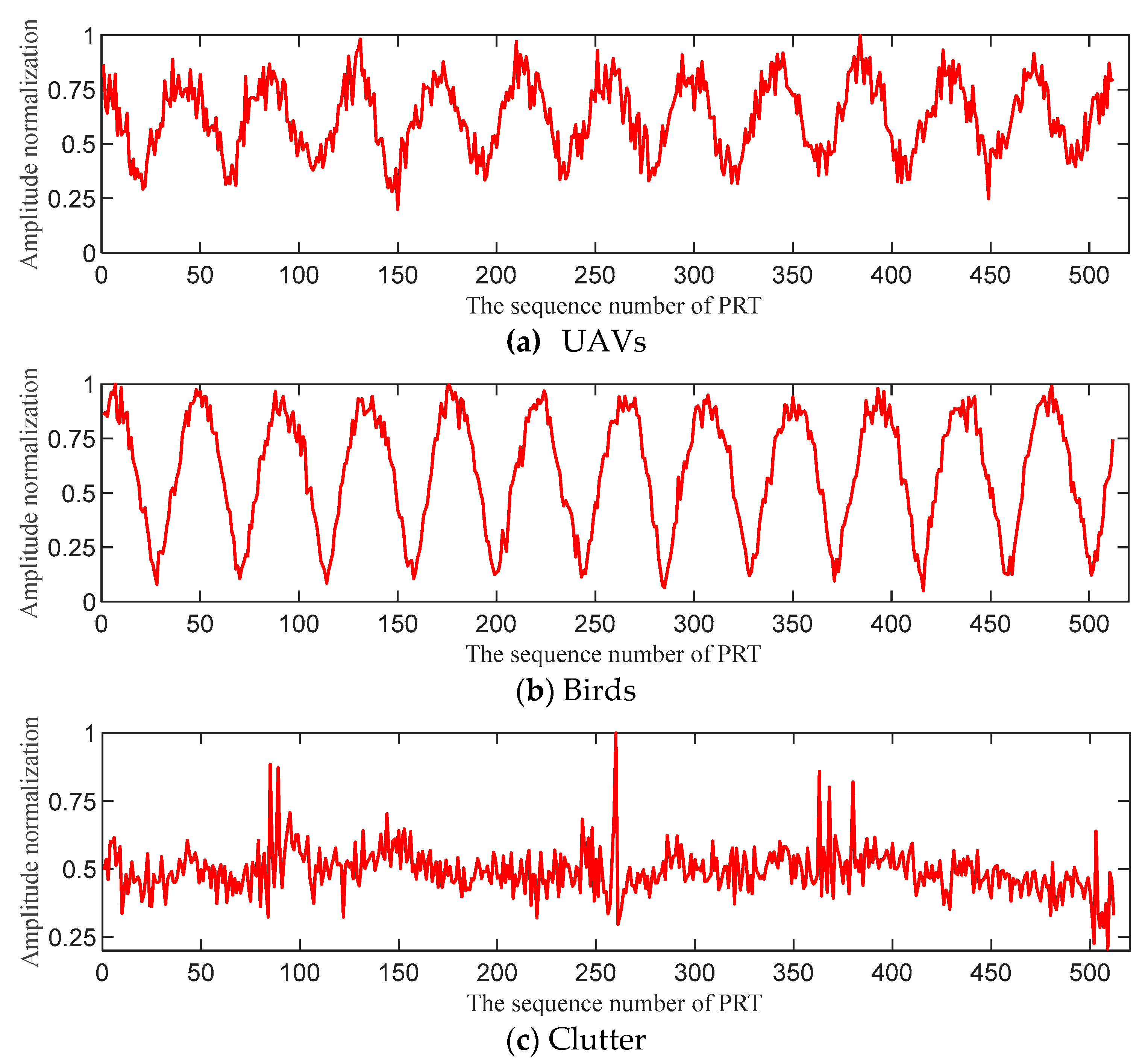
- An in-depth study of the motion frequency characteristics of birds, UAVs, and clutter targets in radar signals was conducted. The differences in frequencies within the radar signals show strong discriminability. By integrating the signal frequency difference characteristics of the targets with the network’s multi-frequency, multi-scale processing, an MFMSDC network was constructed, forming the core processing module of this paper.
- By flexibly using attention modules, the differences between targets and the background, especially in distinguishing clutter signals, were emphasized. This enabled the network to focus more on the features of birds and UAVs and effectively increased the network’s attention to the differentiated frequency characteristics of various targets, thereby improving the model’s performance.
- Through comparative experiments on the accumulation length of the slow-time dimension, it was determined that an accumulation length of 512 offers high timeliness for target classification. Method comparison experiments and ablation studies have demonstrated that directly processing one-dimensional radar signals in the slow-time dimension with a 1D-CNNs can efficiently distinguish categories of LSS targets.
2. Related Works
2.1. 1D-CNNs
2.2. Radar Signal Processing
3. Our Method
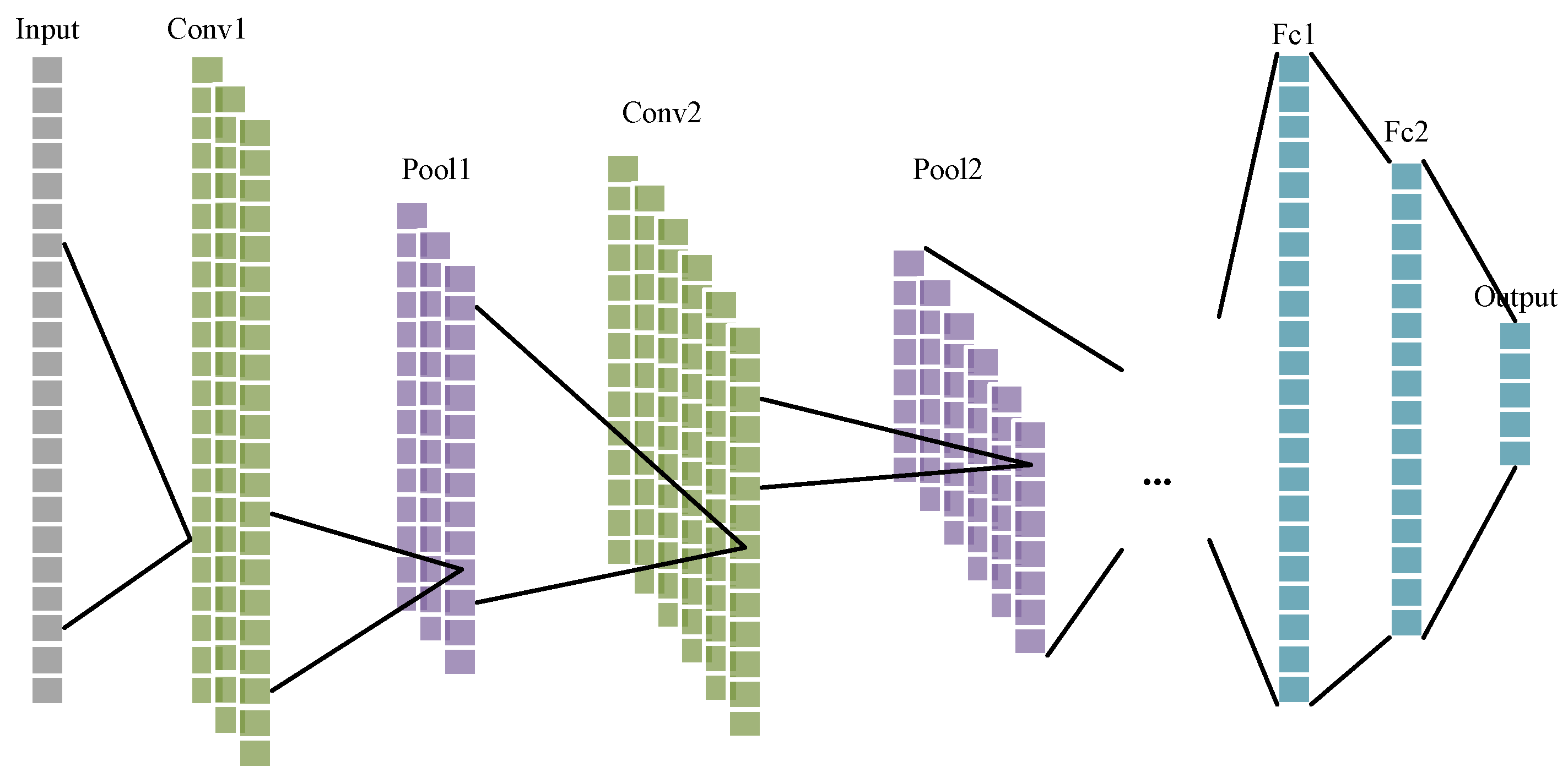
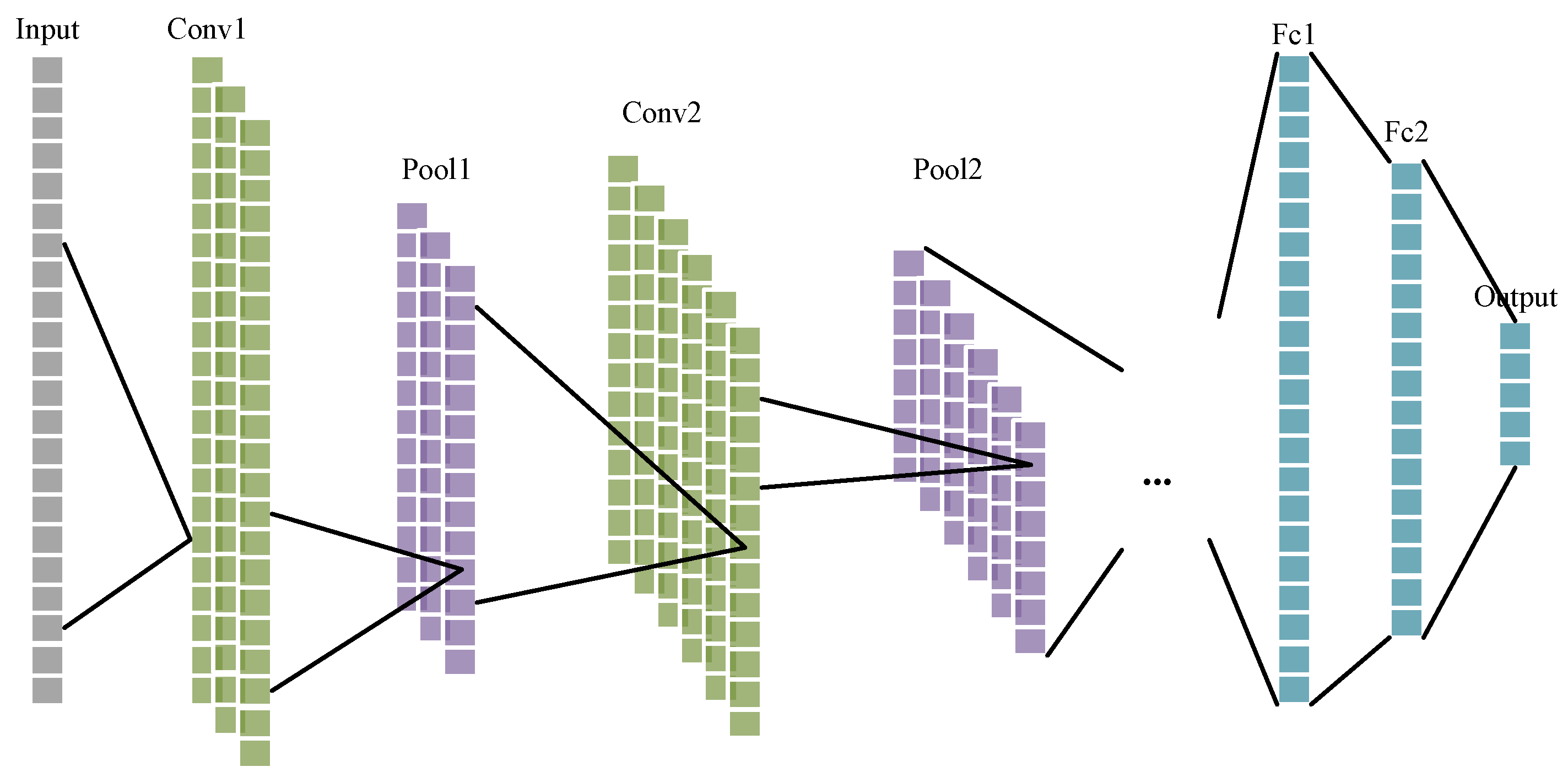
3.1. One-Dimensional Convolutional Neural Network
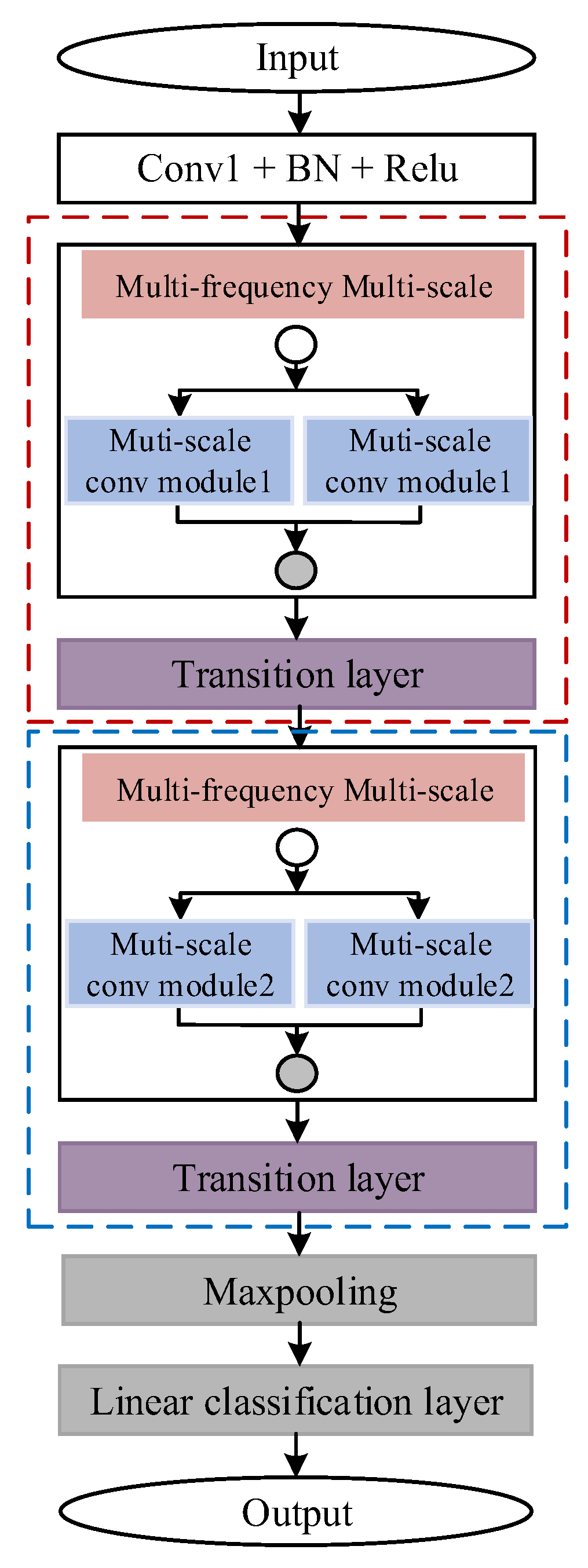
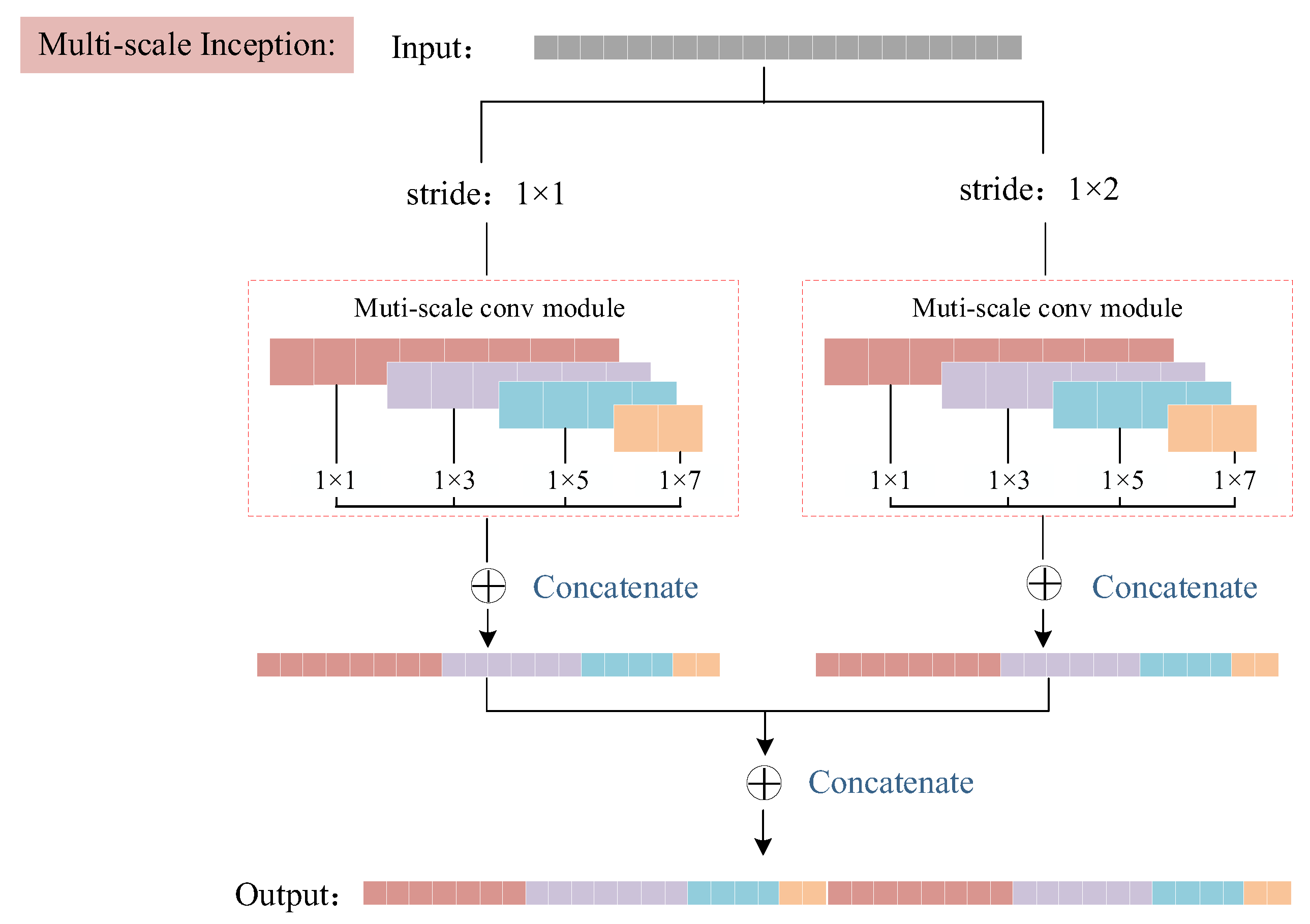
3.2. Multi-Frequency Multi-Scale Convolutional Neural Network
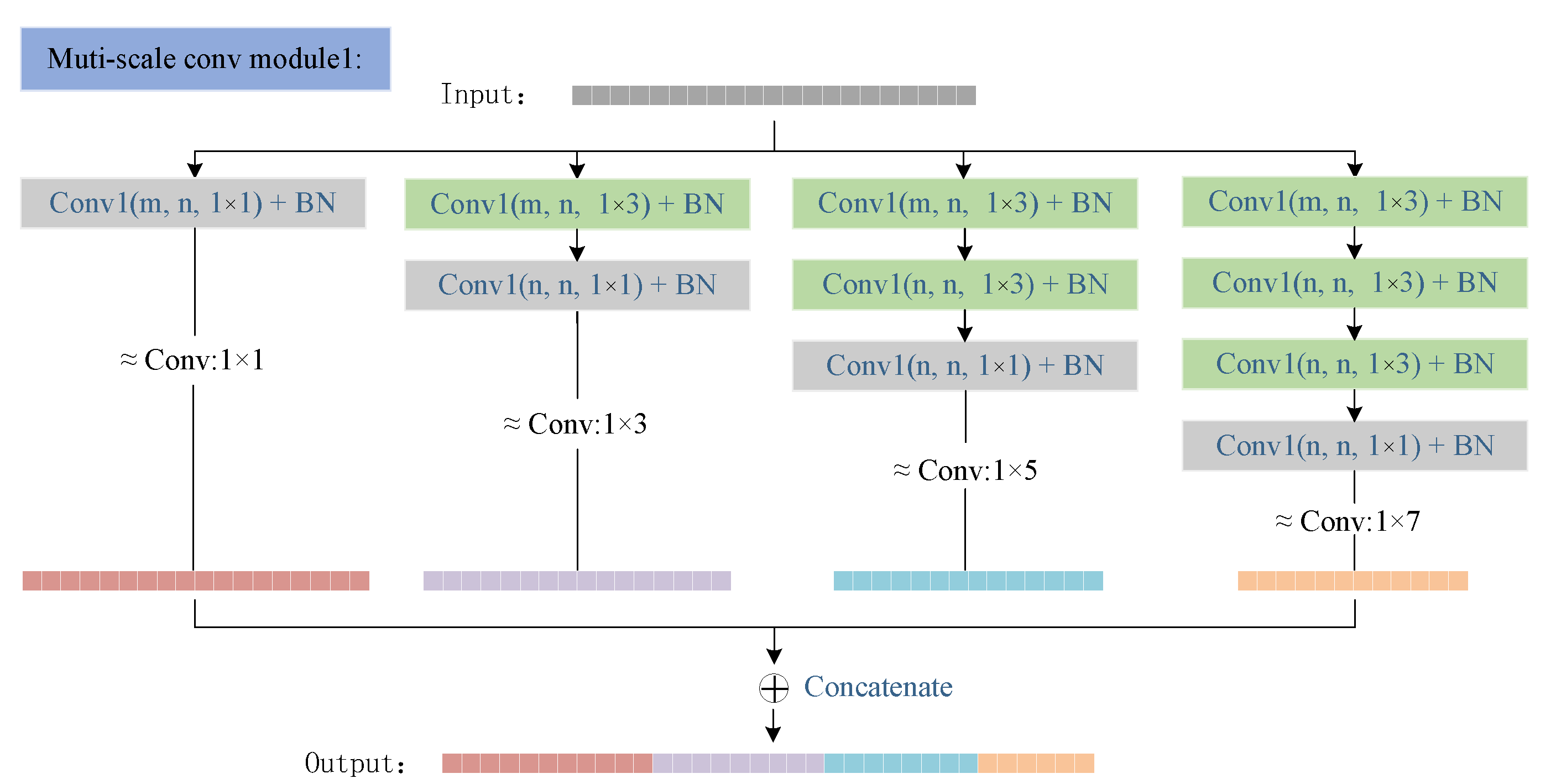
3.2.1. MFMSDC Module
3.2.2. Transition Layer
- (a)
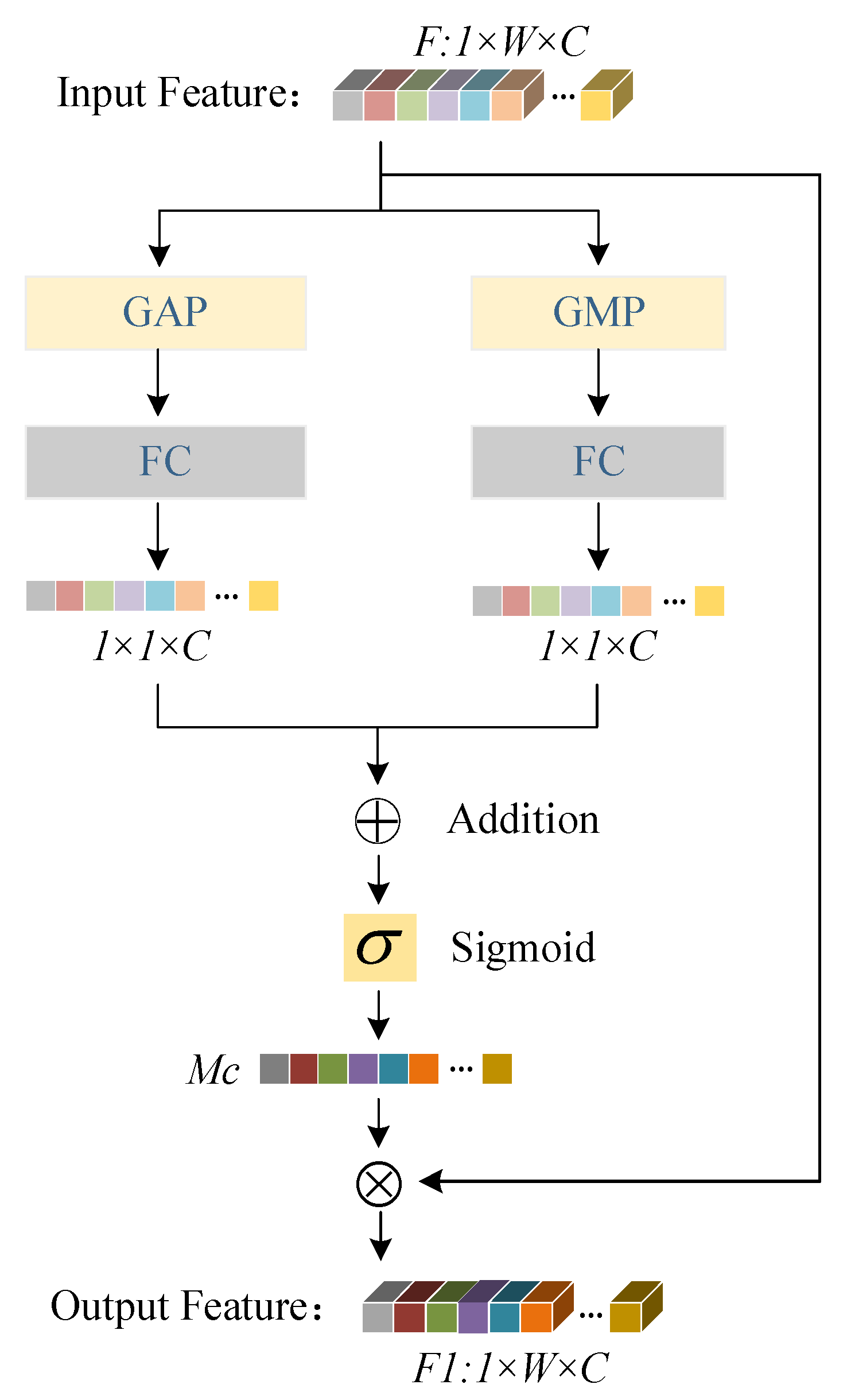
- Channel Attention Module
- (b)
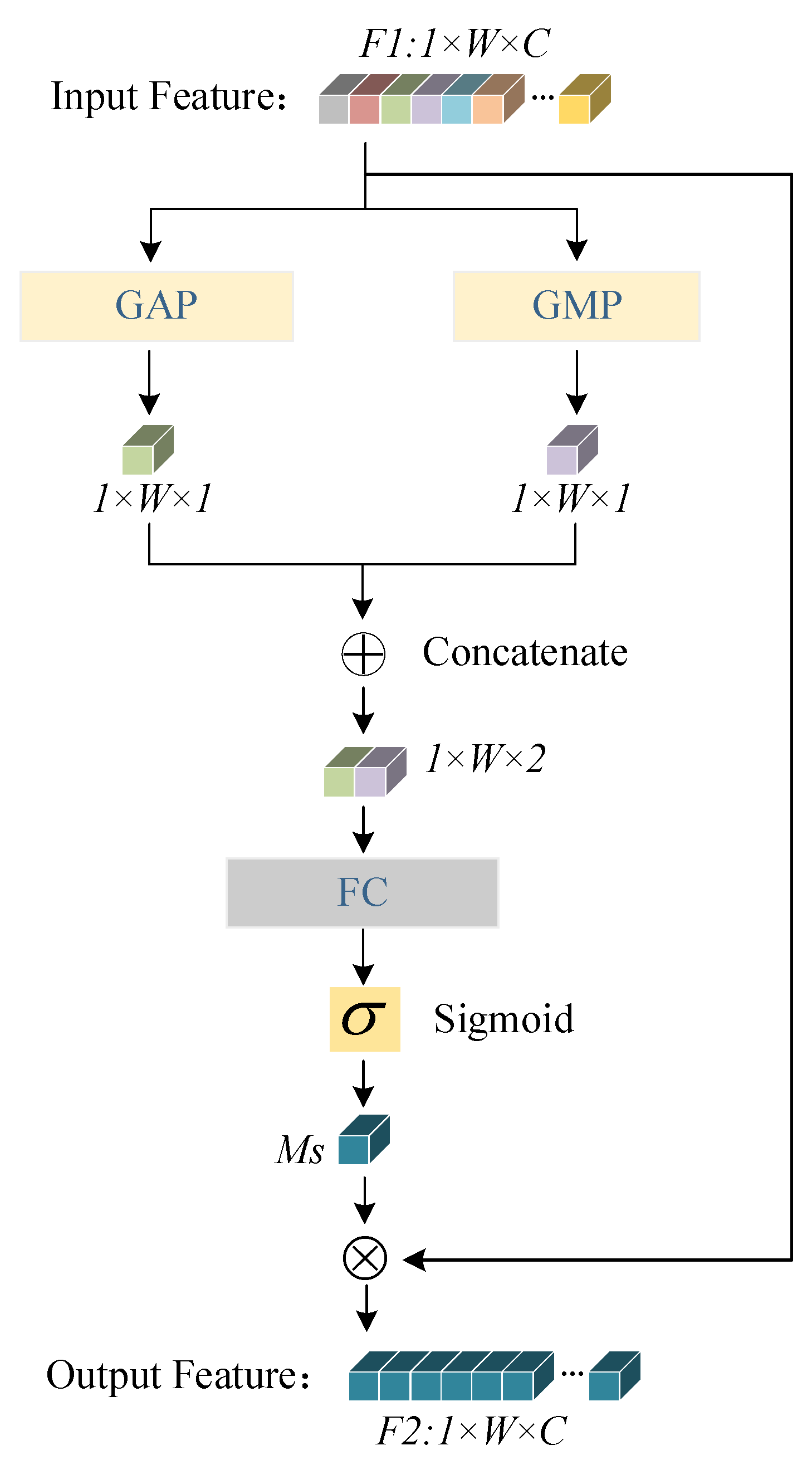
- The Spatial Attention Module
- (c)
- The Linear Classification (LC) layer
4. Experiment and Result Analysis
4.1. Evaluation Dataset
- (a)
- Data cleansing for collected data primarily involves removing invalid, duplicate, and outlier entries from the database to ensure the integrity and reliability of the dataset for further processing and analysis.
- (b)
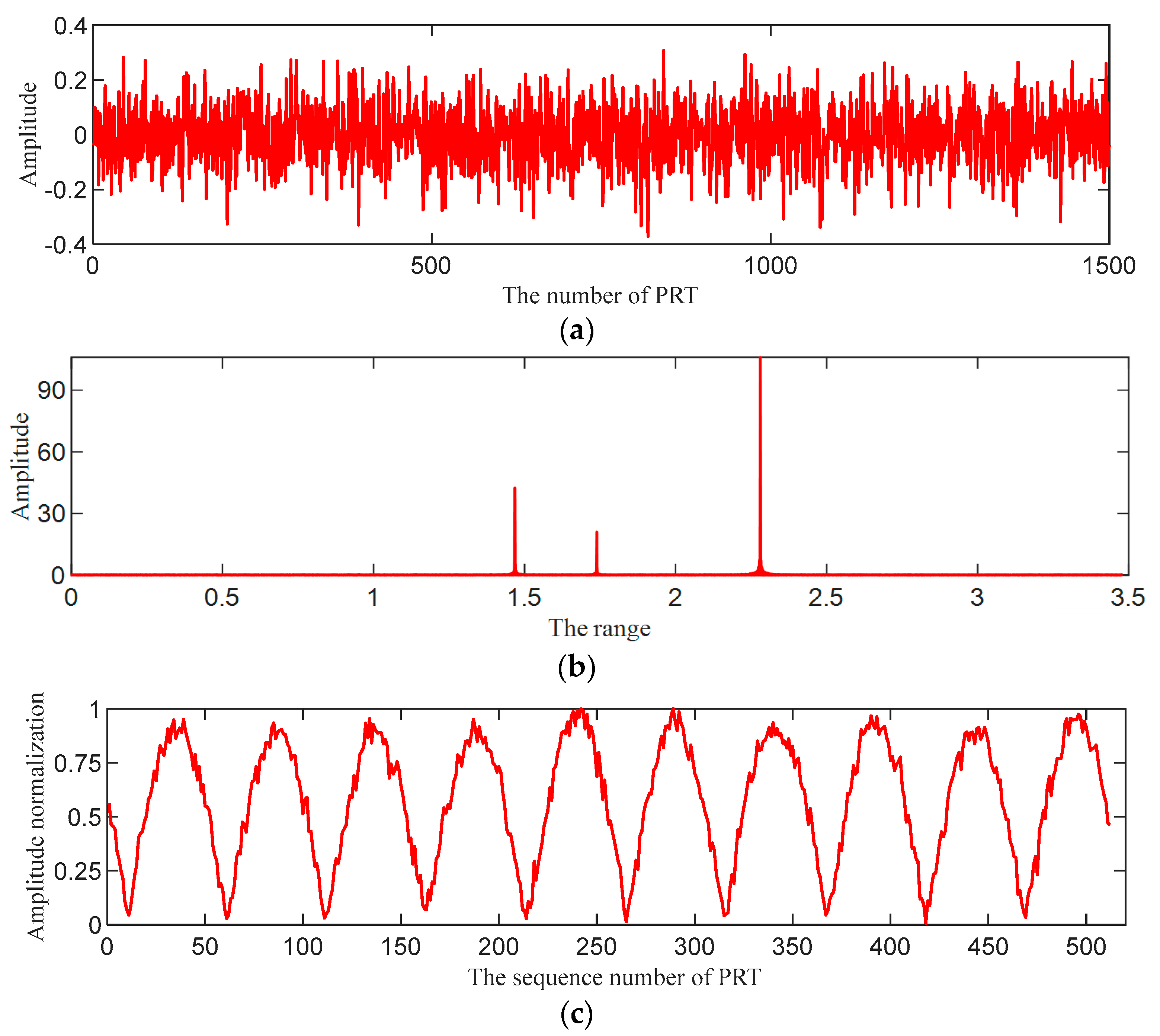
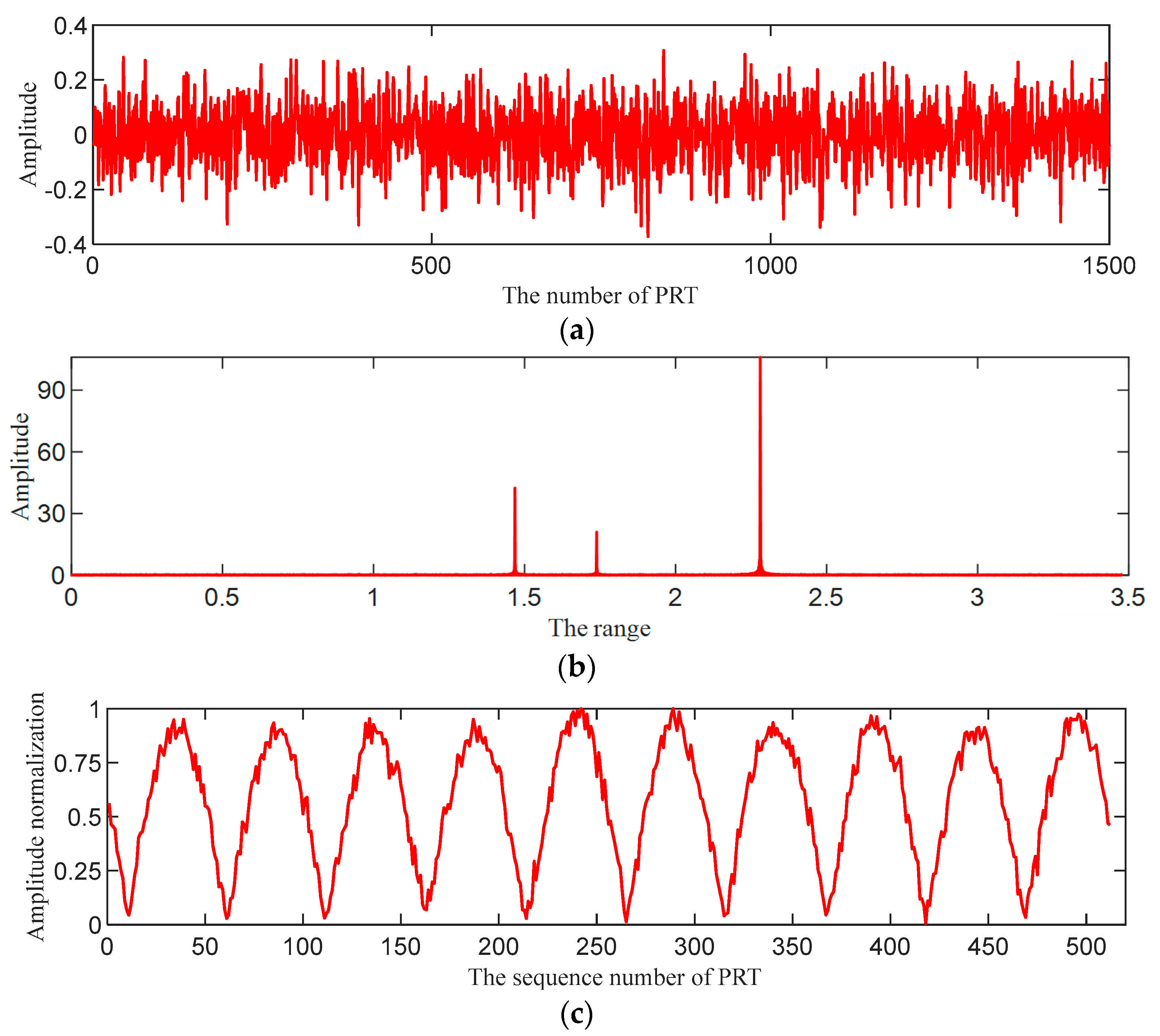
- Following data cleansing, absolute amplitude detection is carried out using algorithms such as CFAR. Based on the detection outcomes, data segments are extracted with a length of L, where L is determined by specific requirements and typically ranges from 256, 512, etc., with this study selecting 512 for extraction length.
- (c)
- For the data segments obtained after clipping, amplitude information is calculated. Assuming a point in the complex signal of length L is a + bi, the amplitude is calculated as follows:
4.2. Implementation Details
4.3. Result Comparisons on Varying Length of Accumulation Time
4.4. Result Comparisons on Self-Collected Dataset
4.5. Result Comparisons on Spectrogram
4.6. Ablation Study
4.6.1. The Impact of the MFMSDC Module
4.6.2. The Impact of Optimizing the Transition Layer
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, W.H.; Liu, J.; Chen, X.L. Non-cooperative UAV Target Recognition in Low-altitude Airspace Based on Motion Model. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 687–694. [Google Scholar] [CrossRef]
- Wu, X.S.; Fang, Z.J.; Chen, T.H. Research on Civil UAV Countermeasure Technology. China Radio 2018, 3, 55–58. [Google Scholar] [CrossRef]
- Han, Y.; Liu, H.; Wang, Y.; Liu, C. A comprehensive review for typical applications based upon unmanned aerial vehicle platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9654–9666. [Google Scholar] [CrossRef]
- Han, Y.; Deng, C.; Zhao, B.; Tao, D. State-aware anti-drift object tracking. IEEE Trans. Image Process. 2019, 28, 4075–4086. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Deng, C.; Zhao, B.; Zhao, B. Spatial-temporal context-aware tracking. IEEE Signal Process. Lett. 2019, 26, 500–504. [Google Scholar] [CrossRef]
- Deng, C.; He, S.; Han, Y.; Zhao, B. Learning dynamic spatial-temporal regularization for UAV object tracking. IEEE Signal Process. Lett. 2021, 28, 1230–1234. [Google Scholar] [CrossRef]
- Zhao, B.; Wang, H.; Tang, L.; Han, Y. Towards long–term UAV object tracking via effective feature matching. Electron. Lett. 2020, 56, 1056–1059. [Google Scholar] [CrossRef]
- Han, Y.; Wang, H.; Zhang, Z.; Wang, Z. Boundary–aware vehicle tracking upon UAV. Electron. Lett. 2020, 56, 873–876. [Google Scholar] [CrossRef]
- Luo, H.H.; Lu, Y.Q. Ability Status and Development Trend of Anti-“low, slow and small” UAVs. Aerodyn. Missile J. 2019, 6, 32–36. [Google Scholar] [CrossRef]
- Chen, W.H.; Li, J. Review on Development and Applications of Avian Radar Technology. Mod. Radar 2017, 39, 7–17. [Google Scholar] [CrossRef]
- Chen, X.L.; Guan, J.; Huang, Y. Radar Low-observable Target Detection. Sci. Technol. Rev. 2017, 35, 30–38. [Google Scholar] [CrossRef]
- Wang, F.Y.; Guo, R.J.; Hao, M. Balloon Borne Radar Target Detection within Ground Clutter Based on Fractal Character. National Defense Invention Patent Application No.201110015890.X, 16 September 2011. [Google Scholar]
- Wang, C.; Xia, H.Y.; Liu, Y.P. Spatial Resolution Enhancement of Coherent Doppler Wind Lidar Using Joint Time-frequency Analysis. Opt. Commun. 2018, 424, 48–53. [Google Scholar] [CrossRef]
- Du, L.; Chen, X.Y.; Shi, Y. MMRGait-1.0: A Radar Time-frequency Spectrogram Dataset for Gait Recognition under Multi-view and Multi-wearing Conditions. J. Radars 2019, 45, 687–694. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Volume 1, pp. 1097–1105. [Google Scholar]
- Kan, S.; He, Z.; Cen, Y.; Li, Y.; Mladenovic, V.; He, Z. Contrastive Bayesian Analysis for Deep Metric Learning. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 7220–7238. [Google Scholar] [CrossRef] [PubMed]
- Yu, B.; Guo, Z.; Asian, S. Flight Delay Prediction for Commercial Air Transport: A Deep Learning Approach. Transp. Res. Part E Logist. Transp. Rev. 2019, 125, 203–221. [Google Scholar] [CrossRef]
- Su, N.Y.; Chen, X.L.; Guan, J. Detection and Classification of Maritime Target with Micro Motion Based on CNNs. J. Radars 2018, 7, 565–574. [Google Scholar] [CrossRef]
- Hinton, G.; Salakhutdinov, R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Hinton, G.; Deng, L.; Yu, D. Deep Neural Networks for Acoustic Modeling in Speech Recognition: The Shared Views of Four Research Groups. IEEE Signal Process. Mag. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Yu, Q.; Cheng, W.; Li, J.W. Specific Emitter Identification Using Wavelet Transform Feature Extraction. Signal Process. 2018, 34, 1076–1085. [Google Scholar]
- Ye, W.Q.; Yu, Z.F. Signal Recognition Method Based on Joint Time-frequency Radiation Source. Electron. Warf. Technol. 2018, 33, 16–19. [Google Scholar]
- Wu, H.; Yuan, Y.; Wang, X. Specific Emitter Identification Based on Hilbert-Huang Transform-based-time Frequency-energy Distribution Features. IET Commun. 2014, 8, 2404–2412. [Google Scholar] [CrossRef]
- Yang, Y.; Lian, J.J.; Zhou, G.G.; Chen, Z.H. Steel Truss Structure Damage Identification Based on One-dimensional Convolutional Neural Network. In Proceedings of the Tianjin University, Tianjin Steel Structure Society, Academic Committee of the National Symposium on Modern Structural Engineering, Tianjin, China, 19 September 2020; Volume 4. [Google Scholar]
- Wu, C.Z.; Jiang, P.C.; Feng, F.Z.; Chen, T.; Chen, X.L. Gearbox Fault Diagnosis Based on One-dimensional Convolutional Neural Network. Vib. Shock 2018, 37, 51–56. [Google Scholar]
- Li, G.; Zhang, R.; Ritchie, M. Sparsity-driven MicroDoppler Feature Extraction for Dynamic Hand Gesture Recognition. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 655–665. [Google Scholar] [CrossRef]
- Tao, C.; Pan, H.B.; Li, Y.S. Unsupervised Spectral-spatial Feature Learning with Stacked Sparse Autoencoder for Hyperspectral Imagery Classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2438–2442. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P. Supplementary Material for ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 13–19. [Google Scholar]
- Deng, Y.J.; Wu, Z.H.; Lin, Y.F. Flight Passenger Load Factors Prediction Based on RNN Using Multi Granularity Time Attention. Comput. Eng. 2020, 46, 294–301. [Google Scholar]
- Li, D.Q.; Hu, S.J.; He, W.P.; Zhou, B.Q. Correction to: The Area Prediction of Western North Pacific Subtropical High in Summer Based on Gaussian Naive Bayes. Clim. Dyn. 2022, 60, 4199–4205. [Google Scholar] [CrossRef]
- Svetnik, V. Random Forest: A Classification and Regression Tool for Compound Classification and QSAR Modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef] [PubMed]
- Triebe, O.; Laptev, N.; Rajagopal, R. AR-Net: A Simple Auto-Regressive Neural Network for Time-series. arXiv 2019, arXiv:1911.12436. [Google Scholar]
- Yang, L.; Han, Y.Z.; Chen, X. Resolution Adaptive Networks for Efficient Inference. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020. [Google Scholar] [CrossRef]
- He, K.M.; Zhang, X.Y.; Ren, S.Q. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Devlin, J.; Chang, M.W.; Lee, K. Bert: Pre-training of Deep Bidirectional Transformers for Language Understanding. In Proceedings of the 2019 Conference of the North American Chapter of the Association for Computational Linguistics, Human Language Technologies, Minneapolis, MN, USA, 2–7 June 2019; pp. 4171–4186. [Google Scholar] [CrossRef]
- Gui, R.H.; Wang, W.Q.; Pan, Y. Cognitive Target Tracking Via Angle-range-Doppler Estimation with Transmit Subaperturing FDA Radar. IEEE J. Sel. Top. Signal Process. 2018, 12, 76–89. [Google Scholar] [CrossRef]
- Kim, B.K.; Kang, H.S.; Park, S.O. Drone Classification Using Convolutional Neural Networks with Merged Doppler Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 38–42. [Google Scholar] [CrossRef]
- Mendis, G.J.; Wei, J.; Madanayake, A. Deep Learning Cognitive Radar for Micro UAS Detection and Classification. In Proceedings of the 2017 Cognitive Communications for Aerospace Applications Workshop, Cleveland, OH, USA, 27–28 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, Y.H.; Ma, Y.C.; Zhang, Z.L.; Zhang, X.; Zhang, L. Type-aspect Disentanglement Network for HRRP Target Recognition with Missing Aspects. IEEE Geosci. Remote Sens. Lett. 2023, 20, 350–930. [Google Scholar] [CrossRef]
- Zhang, L.; Li, Y.; Wang, W.H.; Wang, J.F.; Long, T. Polarimetric HRRP Recognition Based on ConvLSTM with Self-Attention. IEEE Sens. J. 2021, 21, 7884–7898. [Google Scholar] [CrossRef]
- Song, J.; Wang, Y.H.; Chen, W.; Li, Y.; Wang, J.F. Radar HRRP Recognition Based on CNN. J. Eng. 2019, 21, 7766–7769. [Google Scholar] [CrossRef]
- Jiang, W.; Wu, X.; Wang, Y.; Chen, B.; Feng, W.; Jin, Y. Time–Frequency-Analysis-Based Blind Modulation Classification for Multiple-Antenna Systems. Sensors 2021, 21, 231. [Google Scholar] [CrossRef]
- Park, D.; Lee, S.; Park, S.; Kwak, N. Radar-Spectrogram-Based UAV Classification Using Convolutional Neural Networks. Sensors 2021, 21, 210. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.-Y.; Dzulfikri, Z. Stamping Monitoring by Using an Adaptive 1D Convolutional Neural Network. Sensors 2021, 21, 262. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, H.; Liu, W.; Zhang, L.; Li, B.; Ni, M. Echo Preprocessing-Based Smeared Spectrum Interference Suppression. Electronics 2023, 12, 3690. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Z.; Li, B.; Zhou, B.; Chen, H.; Wang, Y. Analysis of Characteristics and Suppression Methods for Self-Defense Smart Noise Jamming. Electronics 2023, 12, 3270. [Google Scholar] [CrossRef]
- Zou, B.; Feng, W.; Zhu, H. Airborne Radar STAP Method Based on Deep Unfolding and Convolutional Neural Networks. Electronics 2023, 12, 3140. [Google Scholar] [CrossRef]
- Confuorto, P.; Di, M.D.; Centolanza, G. Postfailure Evolution Analysis of a Rainfall-triggered Landslide by Multi-temporal Interferometry SAR Approaches Integrated with Geotechnical Analysis. Remote Sens. Environ. 2017, 188, 51–72. [Google Scholar] [CrossRef]
- Lundén, J.; Koivunen, V. Deep Learning for HRRP-based Target Recognition in Multistatic Radar Systems. In Proceedings of the 2016 IEEE Radar Conference, Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Liu, Y.; Long, T.; Zhang, L.; Wang, Y.; Zhang, X.; Li, Y. SDHC: Joint semantic-data guided hierarchical classification for fine-grained HRRP target recognition. IEEE Trans. Aerosp. Electron. Syst. 2024; early access. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Subcategories | Count |
|---|---|---|
| UAVs | UAV_10 | 222 |
| UAV_5 | 28 | |
| UAV_4–6 | 469 | |
| UAV_5–7 | 359 | |
| UAV_1 | 68 | |
| UAV_1–2 | 95 | |
| UAV_2–3 | 127 | |
| birds | Bird_1–10 | 542 |
| Clutter | 2272 | |
| Total | 4182 |
| Length | Accuracy (A) | Precision (P) | Recall (R) | F1-Score |
|---|---|---|---|---|
| 128 | 0.585 | 0.252 | 0.223 | 0.237 |
| 256 | 0.782 | 0.496 | 0.438 | 0.416 |
| 512 | 0.912 | 0.68 | 0.746 | 0.711 |
| 1024 | 0.913 | 0.65 | 0.756 | 0.704 |
| Methods | Accuracy (A) | Precision (P) | Recall (R) | F1-Score |
|---|---|---|---|---|
| Gaussian NB | 0.687 | 0.426 | 0.417 | 0.421 |
| Random Forest | 0.664 | 0.408 | 0.442 | 0.424 |
| ARNet | 0.785 | 0.452 | 0.423 | 0.437 |
| RANet | 0.732 | 0.456 | 0.418 | 0.436 |
| Resnet18 | 0.811 | 0.488 | 0.413 | 0.447 |
| Resnet34 | 0.833 | 0.485 | 0.426 | 0.454 |
| Resnet50 | 0.845 | 0.51 | 0.582 | 0.527 |
| Our | 0.912 | 0.68 | 0.746 | 0.711 |
| Methods | Accuracy (A) | Precision (P) | Recall (R) |
|---|---|---|---|
| ResNet18 | 0.659 | 0.43 | 0.580 |
| ResNet34 | 0.678 | 0.48 | 0.612 |
| ResNet50 | 0.815 | 0.61 | 0.682 |
| Our | 0.912 | 0.68 | 0.746 |
 ’ indicates that the processing structure is not included during the network processing, while ‘ ’ indicates that the processing structure is included during the network processing.
’ indicates that the processing structure is not included during the network processing, while ‘ ’ indicates that the processing structure is included during the network processing.
’ indicates that the processing structure is not included during the network processing, while ‘ ’ indicates that the processing structure is included during the network processing.
’ indicates that the processing structure is not included during the network processing, while ‘ ’ indicates that the processing structure is included during the network processing.| MFMSDC1 | MFMSDC2 | MFMSDC3 | CAM | SAM | LC | Accuracy (A) | Precision (P) | Recall (R) | F1-Score |
|---|---|---|---|---|---|---|---|---|---|
| | | | | | 0.456 | 0.34 | 0.385 | 0.400 |
| | | | | 0.602 | 0.39 | 0.420 | 0.450 | |
| | | | | 0.651 | 0.45 | 0.481 | 0.508 | |
| | | | | 0.851 | 0.51 | 0.612 | 0.556 | |
| | | | 0.871 | 0.57 | 0.672 | 0.617 | ||
| | | 0.898 | 0.53 | 0.712 | 0.608 | |||
| | 0.912 | 0.68 | 0.746 | 0.711 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, R.; Cen, Y. Radar Signal Classification with Multi-Frequency Multi-Scale Deformable Convolutional Networks and Attention Mechanisms. Remote Sens. 2024, 16, 1431. https://doi.org/10.3390/rs16081431
Liang R, Cen Y. Radar Signal Classification with Multi-Frequency Multi-Scale Deformable Convolutional Networks and Attention Mechanisms. Remote Sensing. 2024; 16(8):1431. https://doi.org/10.3390/rs16081431
Chicago/Turabian StyleLiang, Ruofei, and Yigang Cen. 2024. "Radar Signal Classification with Multi-Frequency Multi-Scale Deformable Convolutional Networks and Attention Mechanisms" Remote Sensing 16, no. 8: 1431. https://doi.org/10.3390/rs16081431
APA StyleLiang, R., & Cen, Y. (2024). Radar Signal Classification with Multi-Frequency Multi-Scale Deformable Convolutional Networks and Attention Mechanisms. Remote Sensing, 16(8), 1431. https://doi.org/10.3390/rs16081431