
Mapping Integrated Crop–Livestock Systems Using Fused Sentinel-2 and PlanetScope Time Series and Deep Learning

 ,
,  ,
,  ,
,  , , , , , , and
, , , , , , and
Abstract
1. Introduction
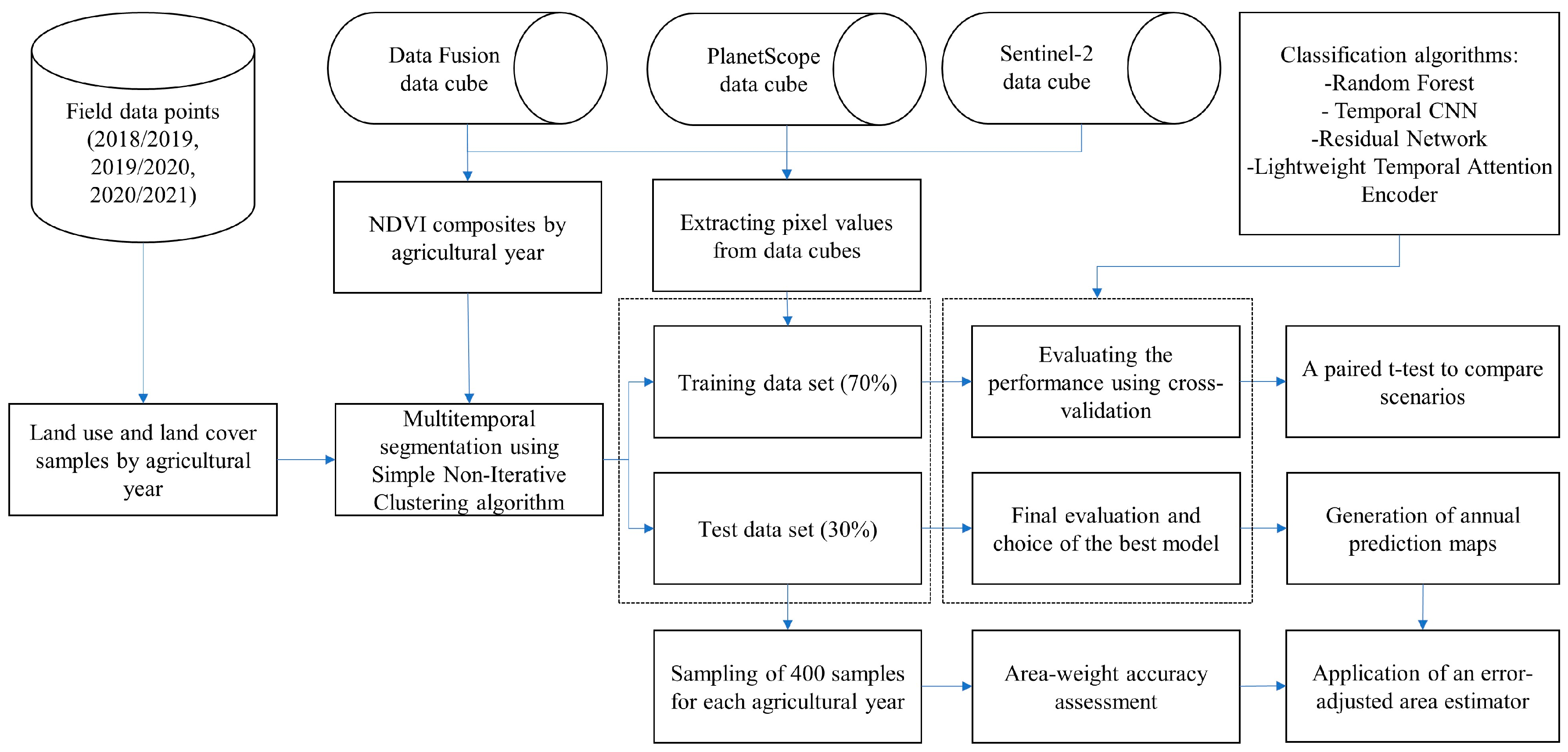
2. Materials and Methods
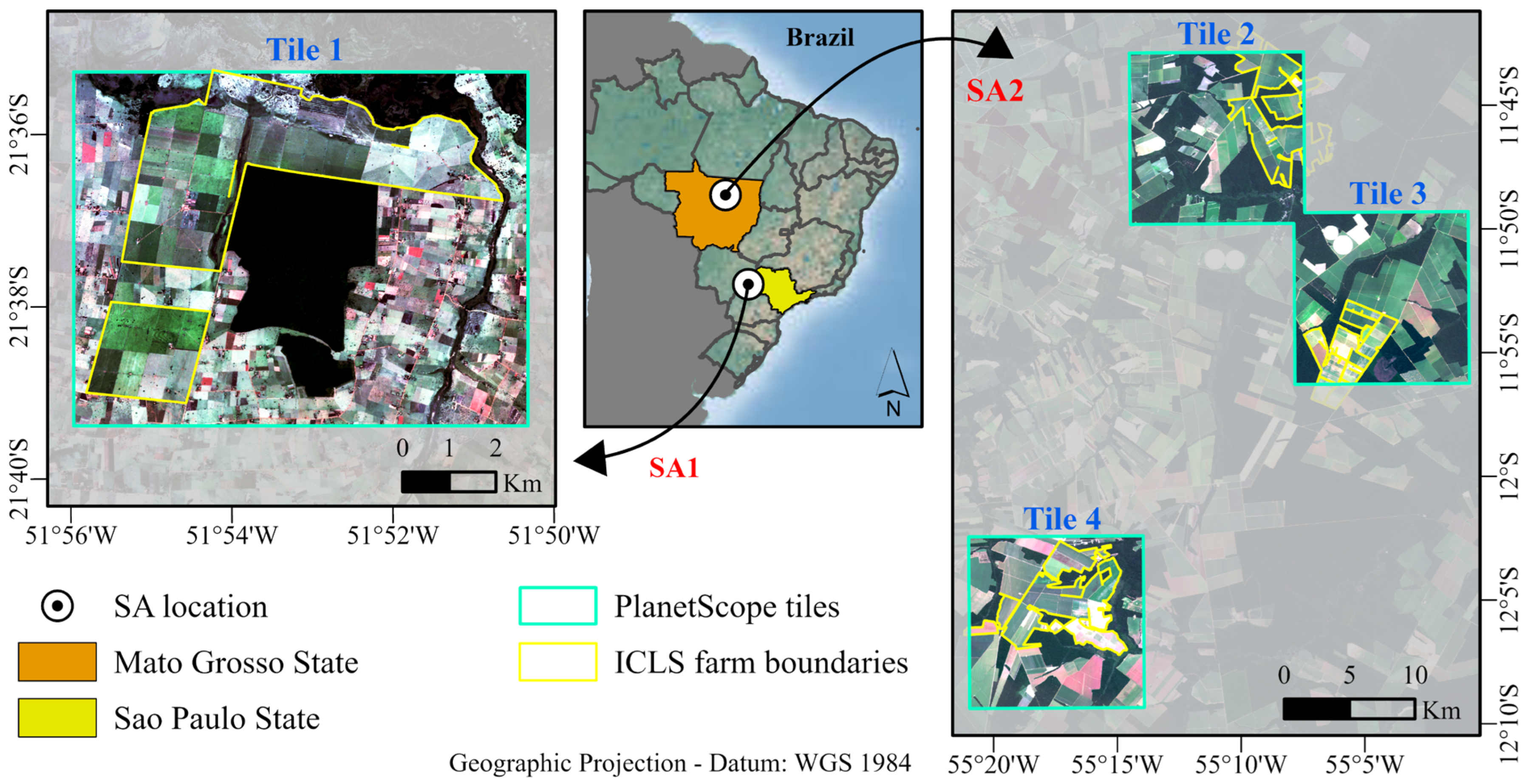
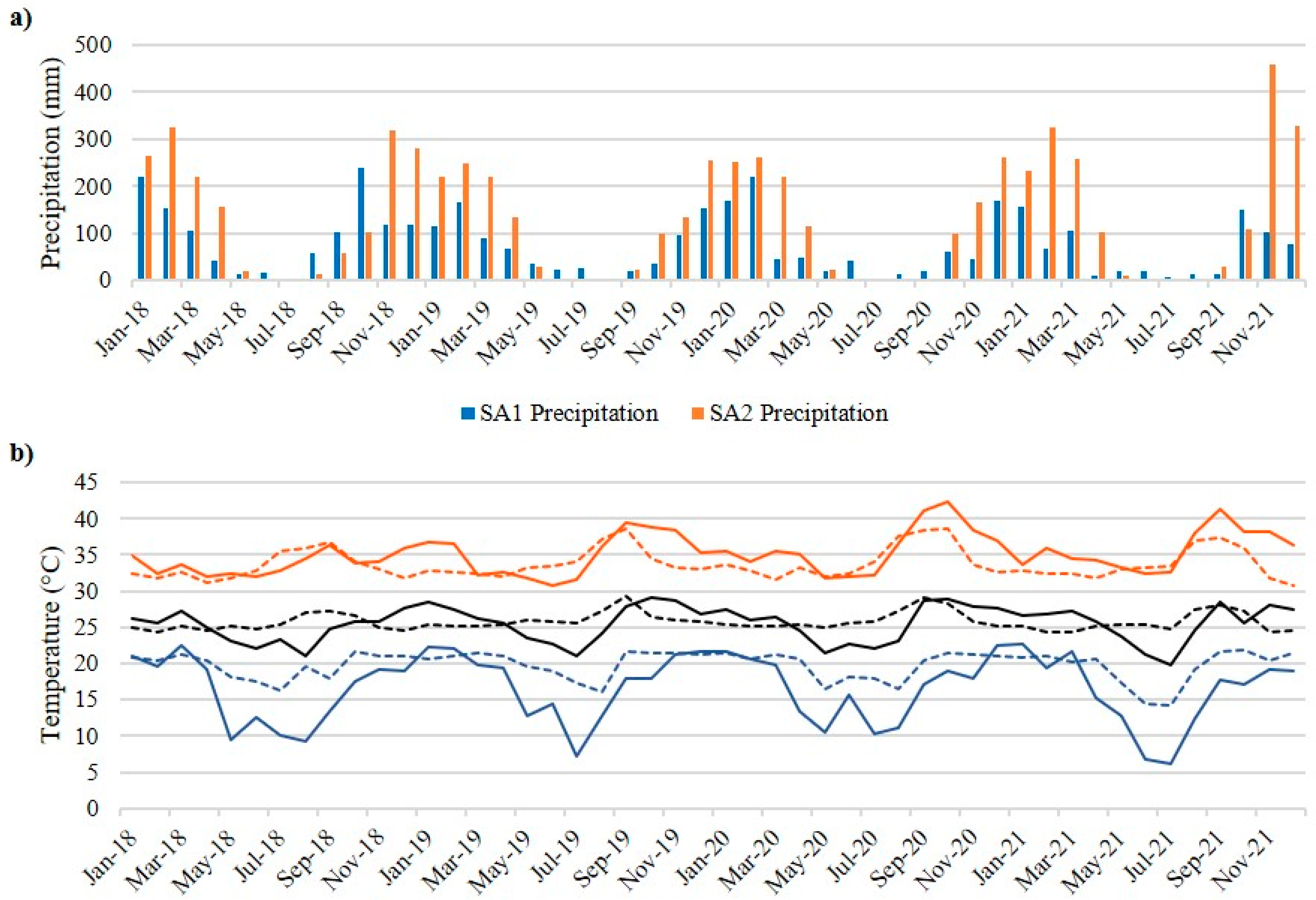
2.1. Study Area

2.2. ICLS Ground Reference Data
2.3. Description of Satellite Data
2.4. Pre-Processing Satellite Images and Data Fusion
2.5. Dataset Partition
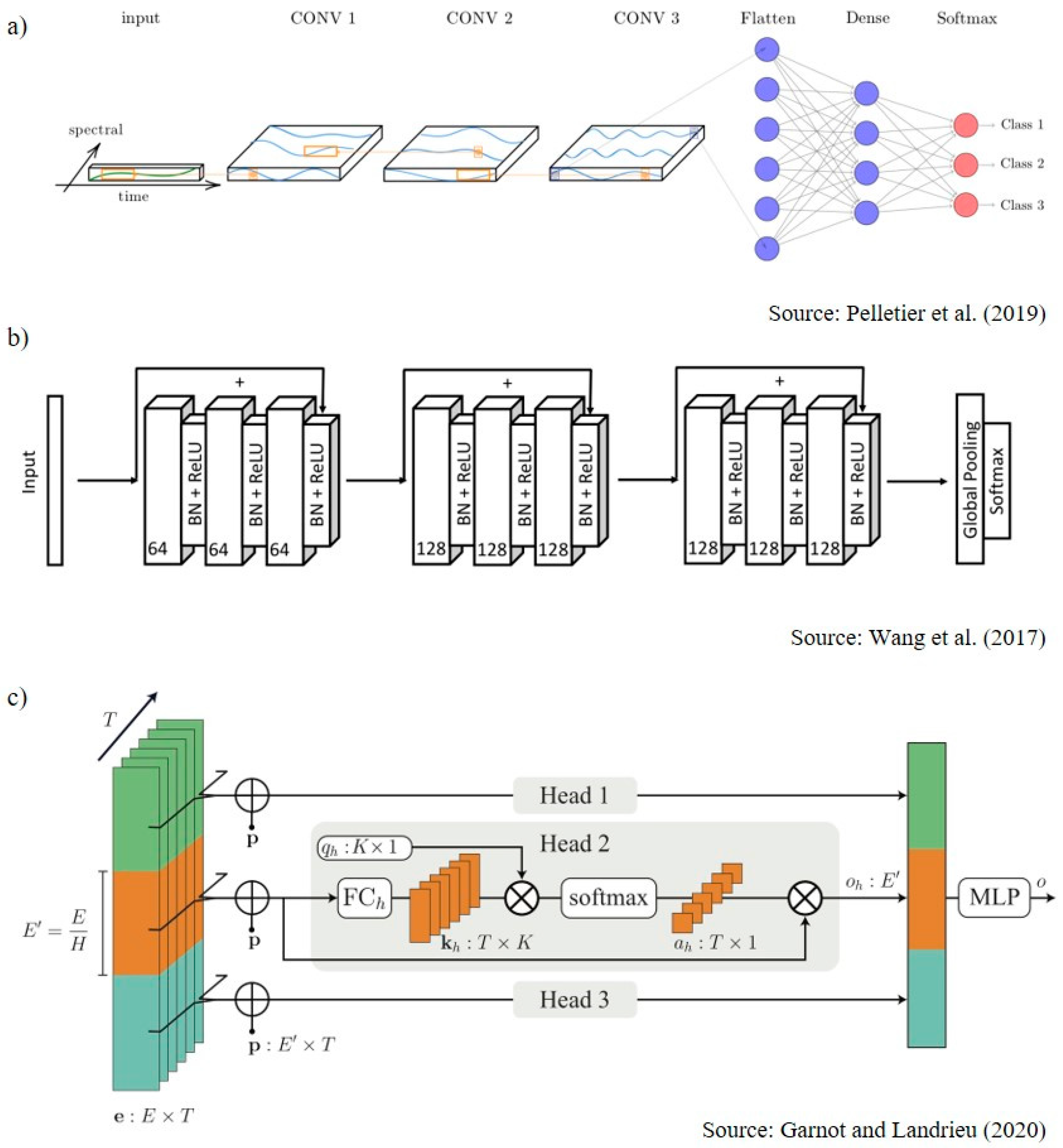
2.6. Machine and Deep Learning Algorithms for ICLS Classification
2.7. ICLS Classification and Mapping Performance Evaluation
3. Results
3.1. ICLS Spectro-Temporal Patterns Computation Using Different Data Sources
3.2. Assessment of the Classification Results
3.3. Spatial Representation of the Classification Results
4. Discussion
4.1. Data Cubes and Their Spectro-Temporal Patterns for ICLS
4.2. ICLS Classification Results Using Different Data Cubes and Deep Learning Algorithms
4.3. ICLS Mapping in the Study Areas
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cortner, O.; Garrett, R.D.; Valentim, J.F.; Ferreira, J.; Niles, M.T.; Reis, J.; Gil, J. Perceptions of Integrated Crop-Livestock Systems for Sustainable Intensification in the Brazilian Amazon. Land Use Policy 2019, 82, 841–853. [Google Scholar] [CrossRef]
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development. Available online: https://www.un.org/sustainabledevelopment/news/communications-material/ (accessed on 7 February 2023).
- Sekaran, U.; Lai, L.; Ussiri, D.A.N.; Kumar, S.; Clay, S. Role of Integrated Crop-Livestock Systems in Improving Agriculture Production and Addressing Food Security—A Review. J. Agric. Food Res. 2021, 5, 100190. [Google Scholar] [CrossRef]
- Delandmeter, M.; de Faccio Carvalho, P.C.; Bremm, C.; dos Santos Cargnelutti, C.; Bindelle, J.; Dumont, B. Integrated Crop and Livestock Systems Increase Both Climate Change Adaptation and Mitigation Capacities. Sci. Total Environ. 2024, 912, 169061. [Google Scholar] [CrossRef] [PubMed]
- Monteiro, A.; Barreto-Mendes, L.; Fanchone, A.; Morgavi, D.P.; Pedreira, B.C.; Magalhães, C.A.S.; Abdalla, A.L.; Eugène, M. Crop-Livestock-Forestry Systems as a Strategy for Mitigating Greenhouse Gas Emissions and Enhancing the Sustainability of Forage-Based Livestock Systems in the Amazon Biome. Sci. Total Environ. 2024, 906, 167396. [Google Scholar] [CrossRef] [PubMed]
- Liebig, M.A.; Ryschawy, J.; Kronberg, S.L.; Archer, D.W.; Scholljegerdes, E.J.; Hendrickson, J.R.; Tanaka, D.L. Integrated Crop-Livestock System Effects on Soil N, P, and pH in a Semiarid Region. Geoderma 2017, 289, 178–184. [Google Scholar] [CrossRef]
- Bonaudo, T.; Bendahan, A.B.; Sabatier, R.; Ryschawy, J.; Bellon, S.; Leger, F.; Magda, D.; Tichit, M. Agroecological Principles for the Redesign of Integrated Crop–Livestock Systems. Eur. J. Agron. 2014, 57, 43–51. [Google Scholar] [CrossRef]
- Garrett, R.D.; Niles, M.; Gil, J.; Dy, P.; Reis, J.; Valentim, J. Policies for Reintegrating Crop and Livestock Systems: A Comparative Analysis. Sustainability 2017, 9, 473. [Google Scholar] [CrossRef]
- Ministry of Agriculture, Livestock and Food Supply. Plan for Adaptaion and Low Carbon Emission in Agriculture: Strategic Vision for a New Cycle. Available online: https://www.gov.br/agricultura/pt-br/assuntos/sustentabilidade/plano-abc/arquivo-publicacoes-plano-abc/abc-english.pdf/@@download/file/ABC+%20English.pdf (accessed on 6 February 2023).
- Chen, Y.; Lin, Z.; Zhao, X.; Wang, G.; Gu, Y. Deep Learning-Based Classification of Hyperspectral Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2094–2107. [Google Scholar] [CrossRef]
- do Nascimento Bendini, H.; Fonseca, L.M.G.; Schwieder, M.; Körting, T.S.; Rufin, P.; Sanches, I.D.A.; Leitão, P.J.; Hostert, P. Detailed Agricultural Land Classification in the Brazilian Cerrado Based on Phenological Information from Dense Satellite Image Time Series. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101872. [Google Scholar] [CrossRef]
- Ajadi, O.A.; Barr, J.; Liang, S.-Z.; Ferreira, R.; Kumpatla, S.P.; Patel, R.; Swatantran, A. Large-Scale Crop Type and Crop Area Mapping across Brazil Using Synthetic Aperture Radar and Optical Imagery. Int. J. Appl. Earth Obs. Geoinf. 2021, 97, 102294. [Google Scholar] [CrossRef]
- Manabe, V.D.; Melo, M.R.S.; Rocha, J.V. Framework for Mapping Integrated Crop-Livestock Systems in Mato Grosso, Brazil. Remote Sens. 2018, 10, 1322. [Google Scholar] [CrossRef]
- Kuchler, P.C.; Simões, M.; Ferraz, R.; Arvor, D.; de Almeida Machado, P.L.O.; Rosa, M.; Gaetano, R.; Bégué, A. Monitoring Complex Integrated Crop–Livestock Systems at Regional Scale in Brazil: A Big Earth Observation Data Approach. Remote Sens. 2022, 14, 1648. [Google Scholar] [CrossRef]
- Toro, A.P.S.G.D.D.; Bueno, I.T.; Werner, J.P.S.; Antunes, J.F.G.; Lamparelli, R.A.C.; Coutinho, A.C.; Esquerdo, J.C.D.M.; Magalhães, P.S.G.; Figueiredo, G.K.D.A. SAR and Optical Data Applied to Early-Season Mapping of Integrated Crop–Livestock Systems Using Deep and Machine Learning Algorithms. Remote Sens. 2023, 15, 1130. [Google Scholar] [CrossRef]
- Planet Labs. Planet Imagery Product Specifications. Available online: https://assets.planet.com/docs/Planet_Combined_Imagery_Product_Specs_letter_screen.pdf (accessed on 10 August 2020).
- Belgiu, M.; Stein, A. Spatiotemporal Image Fusion in Remote Sensing. Remote Sens. 2019, 11, 818. [Google Scholar] [CrossRef]
- Sadeh, Y.; Zhu, X.; Dunkerley, D.; Walker, J.P.; Zhang, Y.; Rozenstein, O.; Manivasagam, V.S.; Chenu, K. Fusion of Sentinel-2 and PlanetScope Time-Series Data into Daily 3 m Surface Reflectance and Wheat LAI Monitoring. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102260. [Google Scholar] [CrossRef]
- Houborg, R.; McCabe, M.F. A Cubesat Enabled Spatio-Temporal Enhancement Method (CESTEM) Utilizing Planet, Landsat and MODIS Data. Remote Sens. Environ. 2018, 209, 211–226. [Google Scholar] [CrossRef]
- Ofori-Ampofo, S.; Pelletier, C.; Lang, S. Crop Type Mapping from Optical and Radar Time Series Using Attention-Based Deep Learning. Remote Sens. 2021, 13, 4668. [Google Scholar] [CrossRef]
- Garnot, V.S.F.; Landrieu, L.; Chehata, N. Multi-Modal Temporal Attention Models for Crop Mapping from Satellite Time Series. ISPRS J. Photogramm. Remote Sens. 2022, 187, 294–305. [Google Scholar] [CrossRef]
- Pelletier, C.; Webb, G.I.; Petitjean, F. Temporal Convolutional Neural Network for the Classification of Satellite Image Time Series. Remote Sens. 2019, 11, 523. [Google Scholar] [CrossRef]
- Wang, Z.; Yan, W.; Oates, T. Time Series Classification from Scratch with Deep Neural Networks: A Strong Baseline. arXiv 2016, arXiv:1611.06455. [Google Scholar]
- Garnot, V.S.F.; Landrieu, L. Lightweight Temporal Self-Attention for Classifying Satellite Images Time Series. In Proceedings of the Advanced Analytics and Learning on Temporal Data; Lemaire, V., Malinowski, S., Bagnall, A., Guyet, T., Tavenard, R., Ifrim, G., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 171–181. [Google Scholar]
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; Gonçalves, J.L.; de Moraes Gonçalves, J.L.; Sparovek, G. Köppen’s Climate Classification Map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- Kuchler, P.C.; Bégué, A.; Simões, M.; Gaetano, R.; Arvor, D.; Ferraz, R.P.D. Assessing the Optimal Preprocessing Steps of MODIS Time Series to Map Cropping Systems in Mato Grosso, Brazil. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102150. [Google Scholar] [CrossRef]
- Parente, L.; Ferreira, L.; Faria, A.; Nogueira, S.; Araújo, F.; Teixeira, L.; Hagen, S. Monitoring the Brazilian Pasturelands: A New Mapping Approach Based on the Landsat 8 Spectral and Temporal Domains. Int. J. Appl. Earth Obs. Geoinf. 2017, 62, 135–143. [Google Scholar] [CrossRef]
- Muñoz-Sabater, J. ERA5-Land Monthly Averaged Data from 1950 to Present. In Copernicus Climate Change Service (C3S) Climate Data Store (CDS). 2019. Available online: https://cds.climate.copernicus.eu/cdsapp#!/dataset/reanalysis-era5-land-monthly-means?tab=overview (accessed on 16 March 2024).
- CONAB. Calendário de Plantio e Colheita de Grãos No Brasil. Available online: https://www.conab.gov.br/institucional/publicacoes/outras-publicacoes/item/15406-calendario-agricola-plantio-e-colheita (accessed on 7 February 2023). (In Portuguese)
- Gil, J.; Siebold, M.; Berger, T. Adoption and Development of Integrated Crop–Livestock–Forestry Systems in Mato Grosso, Brazil. Agric. Ecosyst. Environ. 2015, 199, 394–406. [Google Scholar] [CrossRef]
- Ranghetti, L.; Boschetti, M.; Nutini, F.; Busetto, L. “Sen2r”: An R Toolbox for Automatically Downloading and Preprocessing Sentinel-2 Satellite Data. Comput. Geosci. 2020, 139, 104473. [Google Scholar] [CrossRef]
- Planet Labs. Planet Surface Reflectance Version 2.0. Available online: https://assets.planet.com/marketing/PDF/Planet_Surface_Reflectance_Technical_White_Paper.pdf (accessed on 10 August 2020).
- Appel, M.; Pebesma, E. On-Demand Processing of Data Cubes from Satellite Image Collections with the Gdalcubes Library. Data 2019, 4, 92. [Google Scholar] [CrossRef]
- Simoes, R.; Camara, G.; Queiroz, G.; Souza, F.; Andrade, P.R.; Santos, L.; Carvalho, A.; Ferreira, K. Satellite Image Time Series Analysis for Big Earth Observation Data. Remote Sens. 2021, 13, 2428. [Google Scholar] [CrossRef]
- Griffiths, P.; Nendel, C.; Hostert, P. Intra-Annual Reflectance Composites from Sentinel-2 and Landsat for National-Scale Crop and Land Cover Mapping. Remote Sens. Environ. 2019, 220, 135–151. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the Radiometric and Biophysical Performance of the MODIS Vegetation Indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Rouse, W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite-1 Symposium, Washington, DC, USA, 10–14 December 1973; Volume 1, pp. 309–317. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a Green Channel in Remote Sensing of Global Vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Achanta, R.; Susstrunk, S. Superpixels and Polygons Using Simple Non-Iterative Clustering. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; IEEE: Honolulu, HI, USA, 2017; pp. 4895–4904. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Dos Santos, L.T.; Werner, J.P.S.; Dos Reis, A.A.; Toro, A.P.G.; Antunes, J.F.G.; Coutinho, A.C.; Lamparelli, R.A.C.; Magalhães, P.S.G.; Esquerdo, J.C.D.M.; Figueiredo, G.K.D.A. Multitemporal segmentation of Sentinel-2 images in an agricultural intensification region in Brazil. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2022, V-3-2022, 389–395. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Ismail Fawaz, H.; Forestier, G.; Weber, J.; Idoumghar, L.; Muller, P.-A. Deep Learning for Time Series Classification: A Review. Data Min. Knowl. Disc. 2019, 33, 917–963. [Google Scholar] [CrossRef]
- Rußwurm, M.; Körner, M. Self-Attention for Raw Optical Satellite Time Series Classification. ISPRS J. Photogramm. Remote Sens. 2020, 169, 421–435. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Loshchilov, I.; Hutter, F. Decoupled Weight Decay Regularization. arXiv 2019, arXiv:1711.05101. [Google Scholar]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good Practices for Estimating Area and Assessing Accuracy of Land Change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- FAO. Map Accuracy Assessment and Area Estimation: A Practical Guide. Available online: https://www.fao.org/3/i5601e/i5601e.pdf (accessed on 14 February 2023).
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making Better Use of Accuracy Data in Land Change Studies: Estimating Accuracy and Area and Quantifying Uncertainty Using Stratified Estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Maus, V.; Câmara, G.; Cartaxo, R.; Sanchez, A.; Ramos, F.M.; de Queiroz, G.R. A Time-Weighted Dynamic Time Warping Method for Land-Use and Land-Cover Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3729–3739. [Google Scholar] [CrossRef]
- Zhong, L.; Hu, L.; Zhou, H. Deep Learning Based Multi-Temporal Crop Classification. Remote Sens. Environ. 2019, 221, 430–443. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of Machine-Learning Classification in Remote Sensing: An Applied Review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Meyer, H.; Pebesma, E. Machine Learning-Based Global Maps of Ecological Variables and the Challenge of Assessing Them. Nat. Commun. 2022, 13, 2208. [Google Scholar] [CrossRef]
- Waldner, F.; Chen, Y.; Lawes, R.; Hochman, Z. Needle in a haystack: Mapping rare and infrequent crops using satellite imagery and data balancing methods. Remote Sens. Environ. 2019, 233, 111375. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PS Data Cube | S2 Data Cube | DF Data Cube |
|---|---|---|
| Blue (455–515 nm) | Blue (459–525 nm) | Blue (fused product) |
| Green (500–590 nm) | Green (541–577 nm) | Green (fused product) |
| Red (590–670 nm) | Red (649–680 nm) | Red (fused product) |
| NIR (780–860 nm) | NIR (779–885 nm) | NIR (fused product) |
| - | Red-edge 1 (696–711 nm) | Red-edge 1 (from S2 data cube) |
| - | Red-edge 2 (733–748 nm) | Red-edge 2 (from S2 data cube) |
| - | Red-edge 3 (772–792 nm) | Red-edge 3 (from S2 data cube) |
| - | SWIR 1 (1568–1659 nm) | SWIR 1 (from S2 data cube) |
| - | SWIR 2 (2114–2289 nm) | SWIR 2 (from S2 data cube) |
| EVI | EVI | EVI |
| NDVI | NDVI | NDVI |
| GNDVI | GNDVI | GNDVI |
| MSAVI | MSAVI | MSAVI |
| SAVI | SAVI | SAVI |
| SA | Class | 2018/2019 No. of Samples (Training/Test) | 2019/2020 No. of Samples (Training/Test) | 2020/2021 No. of Samples (Training/Test) | Total Samples for Training Set | Total Samples for Testing Set | Total Training Polygons (70%) | Total Testing Polygons (30%) |
|---|---|---|---|---|---|---|---|---|
| SA1 | CPA | 97/43 | 229/89 | 251/100 | 577 | 232 | 443 | 189 |
| EUC | 22/10 | 64/35 | 60/22 | 146 | 67 | 76 | 33 | |
| FOR | 33/15 | 34/15 | 35/14 | 102 | 44 | 98 | 43 | |
| ICLS | 34/15 | 26/12 | 22/9 | 82 | 36 | 82 | 35 | |
| NVW | 52/23 | 53/22 | 51/24 | 156 | 69 | 110 | 48 | |
| OTH | 33/16 | 43/13 | 39/19 | 115 | 48 | 60 | 26 | |
| PCS | 22/11 | 42/12 | 24/23 | 88 | 46 | 64 | 29 | |
| PRC | 26/6 | 71/29 | 62/34 | 159 | 69 | 58 | 25 | |
| SPC | 22/7 | 111/42 | 79/38 | 212 | 87 | 84 | 37 | |
| SA2 | CPA | 259/97 | 210/106 | 240/78 | 709 | 281 | 223 | 112 |
| DCP | 468/201 | 533/230 | 727/309 | 1728 | 740 | 903 | 387 | |
| FOR | 160/65 | 138/60 | 137/58 | 435 | 183 | 413 | 176 | |
| ICLS | 139/60 | 149/55 | 128/62 | 416 | 177 | 186 | 80 | |
| OTH | 62/16 | 65/18 | 50/36 | 177 | 70 | 58 | 23 | |
| WAT | 37/26 | 36/27 | 41/22 | 114 | 75 | 38 | 17 |
| SA | DF | S2 | PS | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Metric | RF | TempCNN | ResNet | L-TAE | RF | TempCNN | ResNet | L-TAE | RF | TempCNN | ResNet | L-TAE | |
| SA1 | OA | 85.5 | 90.0 | 88.5 | 88.4 | 84.7 | 87.8 | 79.7 | 87.1 | 86.1 | 86.4 | 86.0 | 85.8 |
| F1-Score (ICLS) | 98.6 | 98.6 | 95.9 | 100.0 | 97.1 | 98.6 | 93.3 | 94.6 | 98.6 | 100.0 | 94.6 | 100.0 | |
| PA (ICLS) | 97.2 | 97.2 | 97.2 | 100.0 | 94.4 | 100.0 | 97.2 | 97.2 | 97.2 | 100.0 | 97.2 | 100.0 | |
| UA (ICLS) | 100.0 | 100.0 | 94.6 | 100.0 | 100.0 | 97.3 | 89.7 | 92.1 | 100.0 | 100.0 | 92.1 | 100.0 | |
| SA2 | OA | 95.4 | 95.6 | 94.6 | 94.7 | 95.5 | 95.5 | 95.3 | 95.1 | 95.4 | 95.4 | 94.4 | 95.1 |
| F1-Score (ICLS) | 88.0 | 86.6 | 81.3 | 86.5 | 88.3 | 89.1 | 86.9 | 88.7 | 89.3 | 88.8 | 83.6 | 87.4 | |
| PA (ICLS) | 91.5 | 91.5 | 78.5 | 85.3 | 91.5 | 92.1 | 89.8 | 88.7 | 89.3 | 91.5 | 79.1 | 88.1 | |
| UA (ICLS) | 84.8 | 82.2 | 84.2 | 87.8 | 85.3 | 86.2 | 84.1 | 88.7 | 89.3 | 86.2 | 88.6 | 86.7 | |
| SA | Class | 2018/2019 | 2019/2020 | 2020/2021 | |||
|---|---|---|---|---|---|---|---|
| PA | UA | PA | UA | PA | UA | ||
| SA1 | CPA | 99.7 | 96.1 | 97.2 | 96.0 | 97.4 | 94.1 |
| EUC | 100.0 | 75.0 | 100.0 | 84.6 | 88.4 | 80.0 | |
| FOR | 100.0 | 100.0 | 99.1 | 100.0 | 99.1 | 100.0 | |
| ICLS | 100.0 | 100.0 | 100.0 | 100.0 | 92.2 | 100.0 | |
| NVW | 100.0 | 100.0 | 100.0 | 90.9 | 100.0 | 91.7 | |
| OTH | 100.0 | 88.9 | 100.0 | 75.0 | 78.2 | 75.0 | |
| PCS | 74.1 | 100.0 | 58.3 | 100.0 | 60.0 | 88.9 | |
| PRC | 73.7 | 100.0 | 91.3 | 90.0 | 80.0 | 80.0 | |
| SPC | 58.5 | 71.4 | 63.8 | 60.0 | 58.7 | 70.6 | |
| SA2 | CPA | 94.2 | 91.4 | 100.0 | 85.7 | 100.0 | 81.0 |
| DCP | 95.0 | 100.0 | 96.4 | 98.0 | 98.1 | 98.8 | |
| FOR | 99.4 | 99.4 | 97.8 | 99.4 | 97.4 | 100.0 | |
| ICLS | 95.0 | 69.6 | 86.9 | 90.0 | 88.3 | 100.0 | |
| OTH | 100.0 | 100.0 | 100.0 | 88.9 | 100.0 | 77.8 | |
| WAT | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Werner, J.P.S.; Belgiu, M.; Bueno, I.T.; Dos Reis, A.A.; Toro, A.P.S.G.D.; Antunes, J.F.G.; Stein, A.; Lamparelli, R.A.C.; Magalhães, P.S.G.; Coutinho, A.C.; et al. Mapping Integrated Crop–Livestock Systems Using Fused Sentinel-2 and PlanetScope Time Series and Deep Learning. Remote Sens. 2024, 16, 1421. https://doi.org/10.3390/rs16081421
Werner JPS, Belgiu M, Bueno IT, Dos Reis AA, Toro APSGD, Antunes JFG, Stein A, Lamparelli RAC, Magalhães PSG, Coutinho AC, et al. Mapping Integrated Crop–Livestock Systems Using Fused Sentinel-2 and PlanetScope Time Series and Deep Learning. Remote Sensing. 2024; 16(8):1421. https://doi.org/10.3390/rs16081421
Chicago/Turabian StyleWerner, João P. S., Mariana Belgiu, Inacio T. Bueno, Aliny A. Dos Reis, Ana P. S. G. D. Toro, João F. G. Antunes, Alfred Stein, Rubens A. C. Lamparelli, Paulo S. G. Magalhães, Alexandre C. Coutinho, and et al. 2024. "Mapping Integrated Crop–Livestock Systems Using Fused Sentinel-2 and PlanetScope Time Series and Deep Learning" Remote Sensing 16, no. 8: 1421. https://doi.org/10.3390/rs16081421
APA StyleWerner, J. P. S., Belgiu, M., Bueno, I. T., Dos Reis, A. A., Toro, A. P. S. G. D., Antunes, J. F. G., Stein, A., Lamparelli, R. A. C., Magalhães, P. S. G., Coutinho, A. C., Esquerdo, J. C. D. M., & Figueiredo, G. K. D. A. (2024). Mapping Integrated Crop–Livestock Systems Using Fused Sentinel-2 and PlanetScope Time Series and Deep Learning. Remote Sensing, 16(8), 1421. https://doi.org/10.3390/rs16081421