



Remote, Rugged Field Scenarios for Archaeology and the Field Sciences: Object Avoidance and 3D Flight Planning with sUAS Photogrammetry


Abstract
1. Introduction
The Need for and Challenges of Data Acquisition in Remote, Rugged Field Settings
2. Materials and Methods
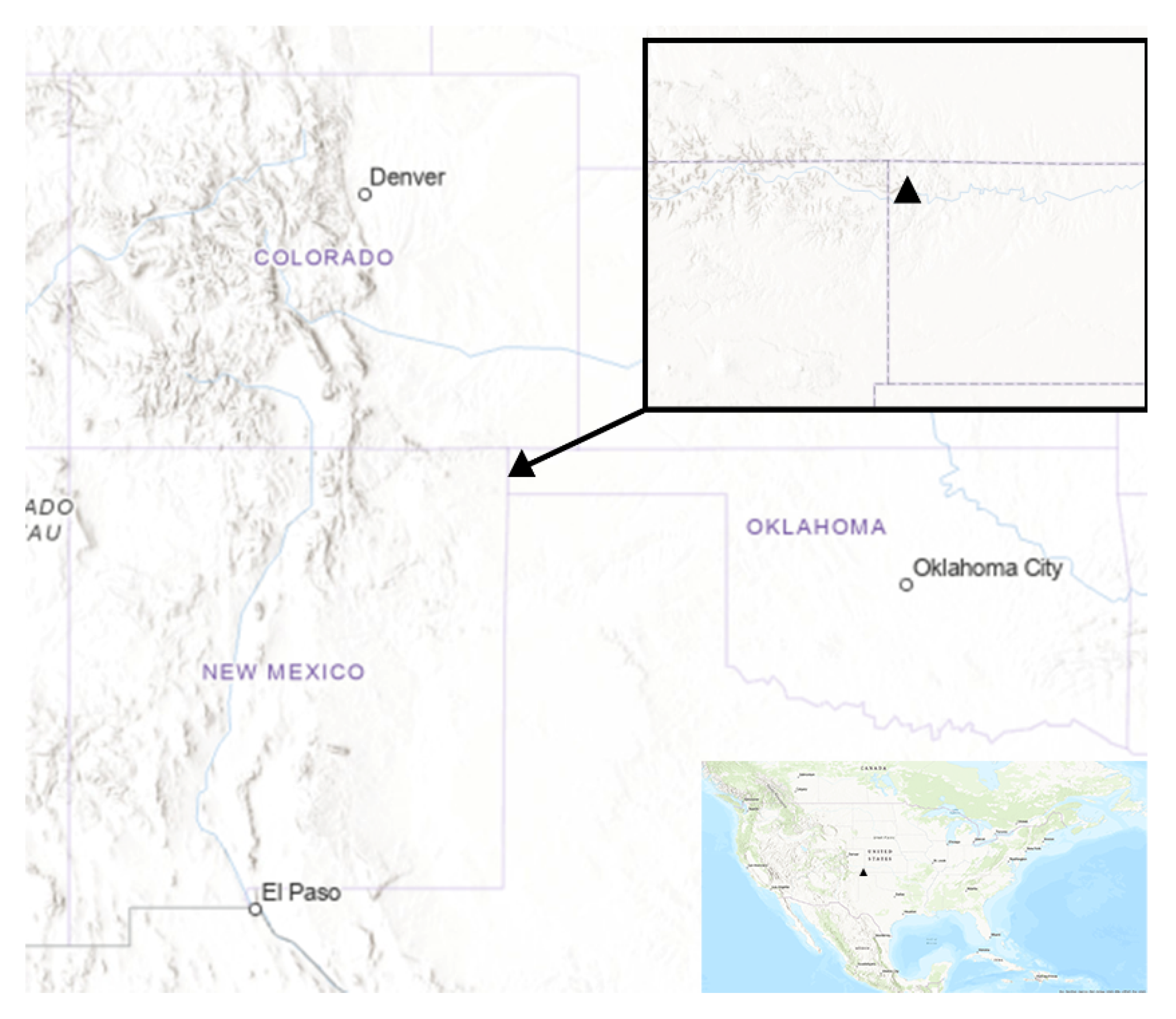
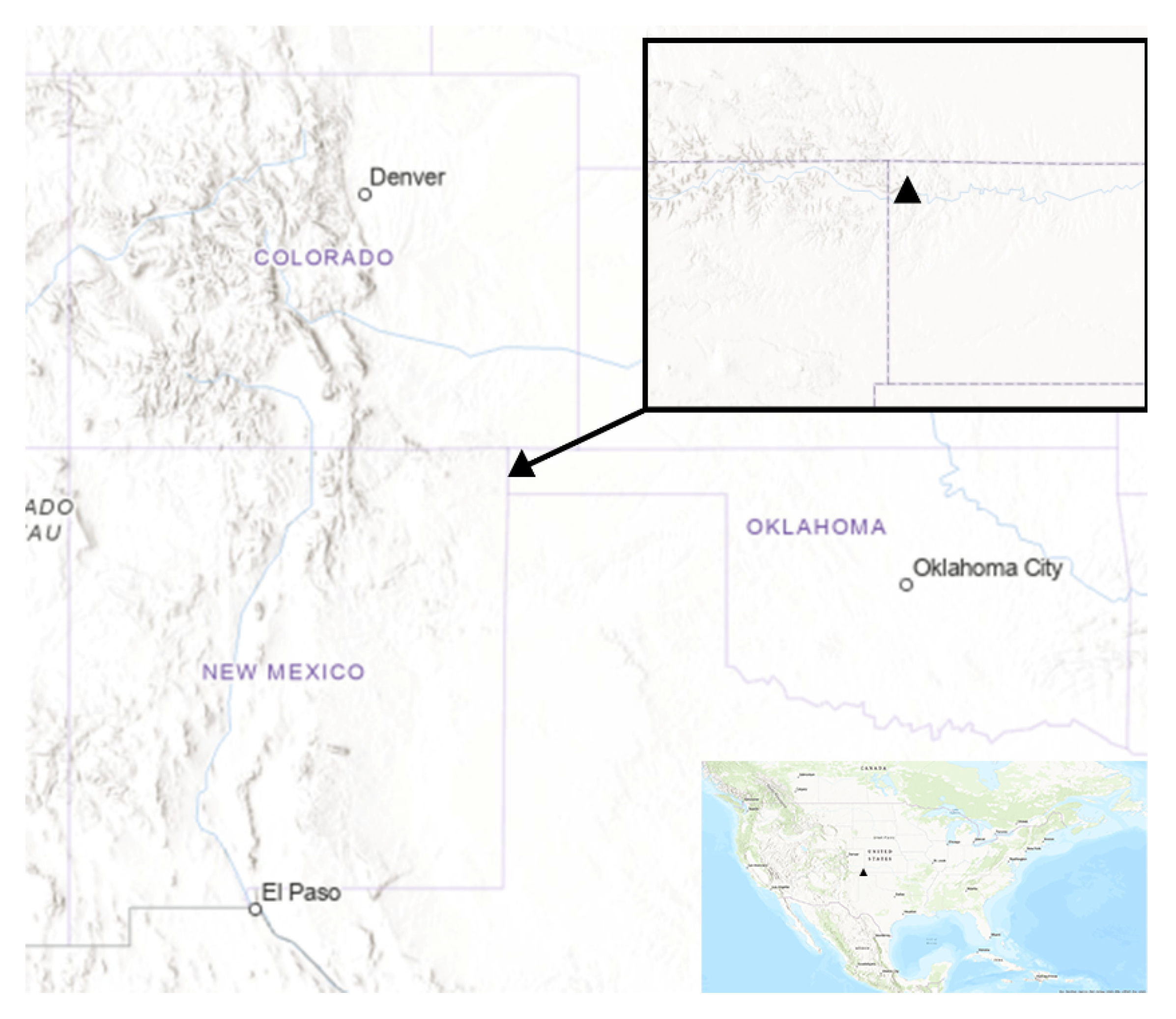
2.1. Case Study Location: Black Mesa, Oklahoma
2.2. Scenarios for Data Acquisition in Remote, Rugged Environments
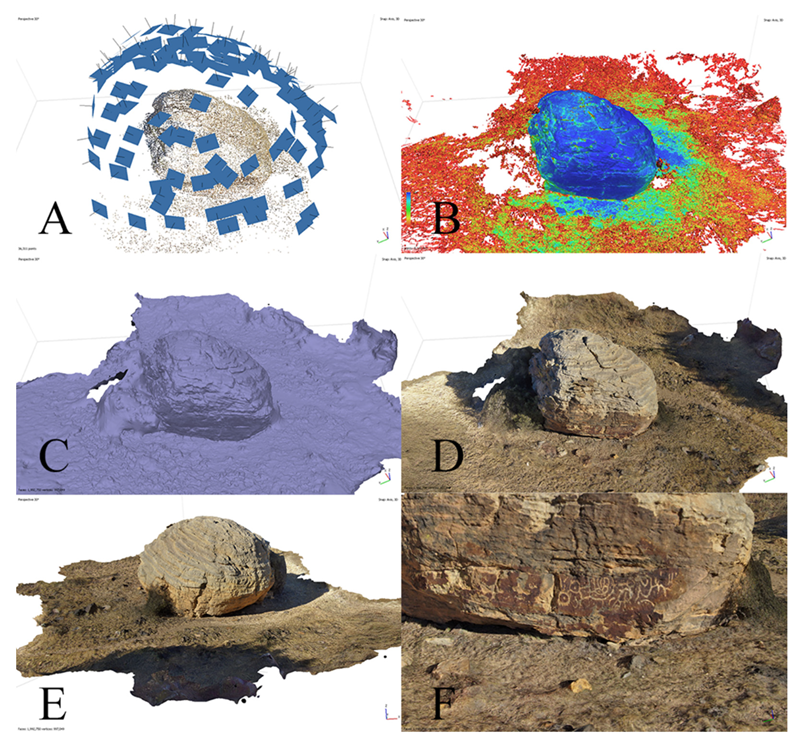
2.2.1. Scenario 1: Documenting a Freestanding Large Object
2.2.2. Scenario 2: Documenting Features along a Bluff Face
2.2.3. Scenario 3: Documenting Features on a High, Distant Promontory
3. Results
3.1. Data Collection and Processing
3.2. Evaluation of sUAS Object Avoidance and Volumetric Flight Planning
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Campana, S. Drones in archaeology. State-of-the-art and future perspectives. Archaeol. Prospect. 2017, 24, 275–296. [Google Scholar] [CrossRef]
- Casana, J. Rethinking the landscape: Emerging approaches to archaeological remote sensing. Annu. Rev. Anthropol. 2021, 50, 167–186. [Google Scholar] [CrossRef]
- Duffy, J.P.; Cunliffe, A.M.; DeBell, L.; Sandbrook, C.; Wich, S.A.; Shutler, J.D.; Myers-Smith, I.H.; Varela, M.R.; Anderson, K. Location, location, location: Considerations when using lightweight drones in challenging environments. Remote Sens. Ecol. Conserv. 2018, 4, 7–19. [Google Scholar] [CrossRef]
- Jordan, B. Collecting field data in volcanic landscapes using small UAS (sUAS)/drones. J. Volcanol. Geotherm. Res. 2019, 385, 231–241. [Google Scholar] [CrossRef]
- Smith, S.L. Drones over the “Black Desert”: The advantages of rotary-wing UAVs for complementing archaeological fieldwork in the hard-to-access landscapes of preservation of North-Eastern Jordan. Geosciences 2020, 10, 426. [Google Scholar] [CrossRef]
- Cowley, D.C.; Moriarty, C.; Geddes, G.; Brown, G.L.; Wade, T.; Nichol, C.J. UAVs in context: Archaeological airborne re-cording in a national body of survey and record. Drones 2018, 2, 2. [Google Scholar] [CrossRef]
- Gutierrez, G.; Searcy, M.T. Introduction to the UAV special edition. SAA Archaeol. Rec. 2016, 16, 6–9. [Google Scholar]
- Hill, A.C.; Rowan, Y.M. The Black Desert Drone Survey: New Perspectives on an Ancient Landscape. Remote Sens. 2022, 14, 702. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Mott, R.; Baylis, S.M.; Pham, T.T.; Wotherspoon, S.; Kilpatrick, A.D.; Raja Segaran, R.; Reid, I.; Terauds, A.; Koh, L.P. Drones count wildlife more accurately and precisely than humans. Methods Ecol. Evol. 2018, 9, 1160–1167. [Google Scholar] [CrossRef]
- Jiménez López, J.L.; Mulero-Pázmány, M. Drones for conservation in protected areas: Present and future. Drones 2019, 3, 10. [Google Scholar] [CrossRef]
- Librán-Embid, F.; Klaus, F.; Tscharntke, T.; Grass, I. Unmanned aerial vehicles for biodiversity-friendly agricultural landscapes—A systematic review. Sci. Total Environ. 2020, 732, 139204. [Google Scholar] [CrossRef]
- O’Driscoll, J. Landscape applications of photogrammetry using unmanned aerial vehicles. J. Archaeol. Sci. Rep. 2018, 22, 32–44. [Google Scholar] [CrossRef]
- Olson, K.G.; Rouse, L.M. A beginner’s guide to mesoscale survey with quadrotor-UAV systems. Adv. Archaeol. Pract. 2018, 6, 357–371. [Google Scholar] [CrossRef]
- Wich, S.A.; Koh, L.P. Conservation Drones: Mapping and Monitoring Biodiversity; Oxford University Press: Oxford, UK, 2018. [Google Scholar] [CrossRef]
- Coops, N.C.; Goodbody, T.R.H.; Cao, L. Four steps to extend drone use in research. Nature 2019, 572, 433–435. [Google Scholar] [CrossRef] [PubMed]
- Hill, A.C. Economical drone mapping for archaeology: Comparisons of efficiency and accuracy. J. Archaeol. Sci. Rep. 2019, 24, 80–91. [Google Scholar] [CrossRef]
- Magnani, M.; Douglass, M.; Schroder, W.; Reeves, J.; Braun, D.R. The digital revolution to come: Photogrammetry in archaeological practice. Am. Antiq. 2020, 85, 737–760. [Google Scholar] [CrossRef]
- Brady, L.M.; Hampson, J.; Sanz, I.D. Recording rock art: Strategies, challenges, and embracing the digital revolution. In The Oxford Handbook of the Archaeology and Anthropology of Rock Art; David, B., McNiven, I.J., Eds.; Oxford Academic: Oxford, UK, 2019. [Google Scholar] [CrossRef]
- Mark, R.; Billo, E. Low altitude unmanned aerial photography to assist in rock art studies. SAA Archaeol. Rec. 2016, 16, 14–16. [Google Scholar]
- Berquist, S.; Spence-Morrow, G.; Gonzalez-Macqueen, F.; Rizzuto, B.; Yépez Álvarez, W.; Bautista, S.; Jennings, J. A new aerial photogrammetric survey method for recording inaccessible rock art. Digit. Appl. Archaeol. Cult. Herit. 2018, 8, 46–56. [Google Scholar] [CrossRef]
- Simek, J.; Alvarez, S.; Cressler, A. Discovering ancient cave art using 3D photogrammetry: Pre-contact Native American mud glyphs from 19th Unnamed Cave, Alabama. Antiquity 2022, 96, 662–678. [Google Scholar] [CrossRef]
- Laugier, E.J.; Casana, J. Integrating satellite, UAV, and ground-based remote sensing in archaeology: An exploration of pre-modern land use in Northeastern Iraq. Remote Sens. 2021, 13, 5119. [Google Scholar] [CrossRef]
- Orsini, C.; Benozzi, E.; Williams, V.; Rossi, P.; Mancini, F. UAV photogrammetry and GIS interpretations of extended ar-chaeological contexts: The case of Tacuil in the Calchaquí area (Argentina). Drones 2022, 6, 31. [Google Scholar] [CrossRef]
- Jorayev, G.; Wehr, K.; Benito-Calvo, A.; Njau, J.; de la Torre, I. Imaging and photogrammetry models of Olduvai Gorge (Tanzania) by Unmanned Aerial Vehicles: A high-resolution digital database for research and conservation of Early Stone Age sites. J. Archaeol. Sci. 2016, 75, 40–56. [Google Scholar] [CrossRef]
- Lim, J.S.; Gleason, S.; Strehlau, H.; Church, L.; Nicolai, C.; Church, W.; Jones, W. Alaska Native allotments at risk: Technological strategies for monitoring erosion and informing solutions in southwest Alaska. Land 2023, 12, 248. [Google Scholar] [CrossRef]
- Vilbig, J.M.; Sagan, V.; Bodine, C. Archaeological surveying with airborne LiDAR and UAV photogrammetry: A comparative analysis at Cahokia Mounds. J. Archaeol. Sci. Rep. 2020, 33, 102509. [Google Scholar] [CrossRef]
- Cerasoni, J.N.; do Nascimento Rodrigues, F.; Tang, Y.; Hallett, E.Y. Do-it-yourself digital archaeology: Introduction and practical applications of photography and photogrammetry for the 2D and 3D representation of small objects and artefacts. PLoS ONE 2022, 17, e0267168. [Google Scholar] [CrossRef] [PubMed]
- Williamson, M. Skydio 2+ enterprise kit with 3D Scan. Technol. Archit. Des. 2022, 6, 248–250. [Google Scholar] [CrossRef]
- Larrick, D.; Drass, R.; Bement, L.C. Corn Cobs and Drive Lanes: NRHP Testing of Three Sites in the Black Mesa Region, Cimarron County, Oklahoma, Project No. 19-201; Tech Rep, Research Series No. 6, Oklahoma Archeological Survey; The University of Oklahoma: Norman, OK, USA, 2020. [Google Scholar]
- Ramos Berrios, A.N.; Bethke, B.; Bement, L.C. Tipi-Toeing across the Uplands: Pedestrian Survey along The Cimarron River/High Plains Border, Northwest Cimarron County, Oklahoma; Oklahoma Archeological Survey Research Series; The University of Oklahoma: Norman, OH, USA, 2022; Volume 12. [Google Scholar]
- Bement, L.C.; Carmichael, C.R. From Top to Bottom: Pedestrian Survey of the Black Mesa Region, Cimarron County, Okla-Homa. Tech. Rep; Archeological Resource Survey Report No. 48, Oklahoma Archeological Survey; The University of Oklahoma: Norman, OK, USA, 2003. [Google Scholar]
- Adamopoulos, E.; Rinaudo, F. UAS-based archaeological remote sensing: Review, meta-analysis and state-of-the-art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Casana, J.; Laugier, E.J.; Hill, A.C.; Reese, K.M.; Ferwerda, C.; McCoy, M.D.; Ladefoged, T. Exploring archaeological landscapes using drone-acquired lidar: Case studies from Hawai’i, Colorado, and New Hampshire, USA. J. Archaeol. Sci. Rep. 2021, 39, 103133. [Google Scholar] [CrossRef]
- de Reu, J.; Plets, G.; Verhoeven, G.; De Smedt, P.; Bats, M.; Cherretté, B.; De Maeyer, W.; Deconynck, J.; Herremans, D.; Laloo, P.; et al. Towards a three-dimensional cost-effective registration of the archaeological heritage. J. Archaeol. Sci. 2013, 40, 1108–1121. [Google Scholar] [CrossRef]
- Krátký, V.; Petráček, P.; Nascimento, T.; Čadilová, M.; Škobrtal, M.; Stoudek, P.; Saska, M. Safe documentation of historical monuments by an autonomous unmanned aerial vehicle. ISPRS Int. J. Geoinf. 2021, 10, 738. [Google Scholar] [CrossRef]
- Masini, N.; Abate, N.; Terenzio Gizzi, F.; Vitale, V.; Amodio, A.M.; Sileo, M.; Biscione, M.; Lasaponara, R.; Bentivenga, M.; Cavalcante, F. UAV LiDAR based approach for the detection and interpretation of archaeological micro topography under canopy—The rediscovery of Perticara (Basilicata, Italy). Remote Sens. 2022, 14, 6074. [Google Scholar] [CrossRef]
- Ullman, M.; Laugomer, B.; Shicht, I.; Langford, B.; Ya’aran, S.; Wachtel, I.; Frumkin, A.; Davidovich, U. Formation processes and spatial patterning in a late prehistoric complex cave in northern Israel informed by SLAM-based LiDAR. J. Archaeol. Sci. Rep. 2023, 47, 103745. [Google Scholar] [CrossRef]
- Mousavi, V.; Varshosaz, M.; Rashidi, M.; Li, W. A new multi-criteria tie point filtering approach to increase the accuracy of UAV photogrammetry models. Drones 2022, 6, 413. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; Di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy assessment of 3D photogrammetric models from an unmanned aerial vehicle. Drones 2019, 3, 79. [Google Scholar] [CrossRef]
- Jalandoni, A.J.; Domingo, I.; Taçon, P.S.C. Testing the value of low-cost Structure-from-Motion (SfM) photogrammetry for metric and visual analysis of rock art. J. Archaeol. Sci. Rep. 2018, 17, 605–616. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boulder | Apple 3 | Apple 4 | Whitten | |
|---|---|---|---|---|
| Total number of images | 129 | 152 | 124 | 152 |
| Autonomous images | Unrecorded | 132 | 114 | 112 |
| Manual images | Unrecorded | 19 | 9 | 45 |
| Flying altitude (m) | 3.22 | 1.39 | 1.49 | 4.44 |
| Ground resolution (mm/pix) | 1.53 | 0.73 | 0.84 | 2.9 |
| Coverage area (m2) | 254 | 29.7 | 33 | 494 |
| Tie points | 36,311 | 21,819 | 58,566 | 24,925 |
| Projections | 94,696 | 81,285 | 155,408 | 76,739 |
| Reprojection error (pix) | 0.46 | 0.57 | 0.44 | 0.34 |
| Model faces | 1,992,750 | 8,655,166 | 3,381,569 | 6,443,710 |
| Model vertices | 997,049 | 4,330,642 | 1,692,179 | 3,229,016 |
| DSM resolution (cm/pix) | 1.07 | 0.29 | 0.49 | 1.05 |
| DSM point density (points/cm2) | 0.87 | 12.10 | 4.11 | 0.92 |
| File size (MB) | 115.98 | 391.18 | 170.02 | 359.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klehm, C.; Williamson, M.D.; Bement, L.C.; Bethke, B. Remote, Rugged Field Scenarios for Archaeology and the Field Sciences: Object Avoidance and 3D Flight Planning with sUAS Photogrammetry. Remote Sens. 2024, 16, 1418. https://doi.org/10.3390/rs16081418
Klehm C, Williamson MD, Bement LC, Bethke B. Remote, Rugged Field Scenarios for Archaeology and the Field Sciences: Object Avoidance and 3D Flight Planning with sUAS Photogrammetry. Remote Sensing. 2024; 16(8):1418. https://doi.org/10.3390/rs16081418
Chicago/Turabian StyleKlehm, Carla, Malcolm D. Williamson, Leland C. Bement, and Brandi Bethke. 2024. "Remote, Rugged Field Scenarios for Archaeology and the Field Sciences: Object Avoidance and 3D Flight Planning with sUAS Photogrammetry" Remote Sensing 16, no. 8: 1418. https://doi.org/10.3390/rs16081418
APA StyleKlehm, C., Williamson, M. D., Bement, L. C., & Bethke, B. (2024). Remote, Rugged Field Scenarios for Archaeology and the Field Sciences: Object Avoidance and 3D Flight Planning with sUAS Photogrammetry. Remote Sensing, 16(8), 1418. https://doi.org/10.3390/rs16081418