1. Introduction
The Martian polar caps are currently the largest known reservoirs of H
2O ice and CO
2 ice on Mars [
1,
2]. The Martian polar caps have the function of driving the global water cycle of Mars and regulating its atmospheric quality. Many studies have shown that there is an interannual cycle in the north polar regions of Mars, with seasonal cap retreat between Martian years [
3,
4]. For instance, with the ablation of the seasonal ice cap in the Northern Hemisphere of Mars, a large amount of CO
2 sublimates into the atmosphere, which promotes the atmospheric cycle of Mars, with approximately 25% of the atmosphere being cycled through the polar caps annually [
5,
6,
7]. Moreover, icy deposits also record unique information about the past climate conditions and transformations of Mars [
8,
9,
10]. Therefore, the ability to quickly determine the extent of the Martian ice caps and analyze their spatiotemporal variation characteristics is essential.
There are abundant landform features on Mars, such as volcanoes, impact craters, eolian dunes, and polar ice caps. Compared with volcanoes, impact craters, and other topographic and geomorphic types, the reflectance of the Martian ice caps is substantially different, allowing for remote sensing identification. Currently, the methods of using remote sensing technology to identify Martian ice caps are mainly based on radar data and optical data. Among them, the methods of classifying Martian ice caps for optical remote sensing data mainly include visual interpretation, threshold segmentation of a single band or band combinations, and supervised classification using hyperspectral data [
11,
12]. For example, James et al. employed wide-angle, red-band daily global map (DGM) images and thermal radiation data provided by the Mars Global Surveyor (MGS), combined with empirical formulae, to measure reflectance and infer the boundaries of the ice cap based on the light and shade of images [
3]. Based on the Observatoire pour la Minéralogie, l’Eau, les Glaces et l’Activité (OMEGA) instrument’s hyperspectral data obtained by the European Space Agency (ESA)’s Mars Express mission, Zhang et al. utilized the minimum distance classification method to extract the ice cap area in the North Pole region and investigated the seasonal variation in the ice cap over a Martian year [
13]. Although the current remote sensing extraction methods for the Martian ice caps have achieved good results, visual interpretation with a heavy workload is easily affected by Martian weather and other factors [
14,
15]. The large amount of hyperspectral data and the high redundancy between two bands make the extraction of Martian ice caps complicated, and it is difficult to achieve rapid extraction for the analysis and research of Martian ice cap changes with multiperiod remote sensing data.
For analysis of the spatiotemporal variation characteristics of the Martian ice cap, James et al. drew a schematic representation of the recession of the ice cap and ice cap ablation curves as a function of the areocentric longitude of the Sun (Ls) to analyze its spatiotemporal changes in a Martian year [
3]. Appéré et al. used the 1429 nm and 1500 nm bands of OMEGA data to analyze the threshold values of CO
2 ice and H
2O ice reflectance, obtained a variation correlation of the boundary and time of CO
2 ice and H
2O ice ablation, and then constructed the distribution curve of seasonal ice [
16]. Spatiotemporal analysis based on hyperspectral images can determine the ice cap ablation change trend, but it cannot obtain high-temporal-resolution ice cap data covering the entire Northern Hemisphere of Mars. Visual interpretation of Mars Orbiter Camera (MOC) Mars Daily Global Maps (MDGMs) allows for the acquisition of high-temporal-resolution ice cap data. However, the workload of visual interpretation is immense. As a result, it is difficult to conduct long-term ice cap change analysis.
Overall, many achievements have been made in remote sensing extraction and change analysis of the Martian polar ice caps, but there are still limitations. Although there is a large difference in reflectance between ice caps and surrounding coverage types, relying solely on threshold segmentation from a single band may not achieve accurate results, and the workload of visual interpretation is heavy. Hyperspectral data can improve the classification accuracy due to the large number of bands, but they cannot achieve the effect of fast extraction due to the large number of redundant bands and long training time. In addition, in terms of the change analysis of seasonal ice caps, the current research lacks the change law analysis of polar ice cap ablation covering the entire ice cap area, with a fine time interval. Therefore, based on MOC MDGMs with good temporal and spatial continuity covering the entire ice cap area, this study proposes an automatic Martian polar ice cap extraction algorithm for remote sensing data and analyzes the dynamic change characteristics of the Martian North Pole ice cap using time-series data. In this study, we selected regions of interest from images for feature analysis and extraction, aimed at constructing a feature set capable of distinguishing ice caps from other objects. Subsequently, we employed the Otsu method for classification, assessing accuracy to determine the most effective classification approach, which then formed the basis for our automatic Martian polar ice cap extraction algorithm. Utilizing this algorithm, we proceeded to extract ice caps from the time-series images, followed by the calculation of ice cap areas and the extraction of ice cap ablation boundaries. The results extracted and calculated were further used to analyze the dynamic change characteristics of the Martian North Pole ice cap and the driving factors of ice cap ablation.
2. Materials and Methods
2.1. Data and Preprocessing
2.1.1. MOC MDGM Data
The Mars Global Surveyor (MGS) was launched by the United States in November 1996. The MGS is in a polar orbit with an approximately two-hour revisiting period, because twelve consecutive swaths can cover Mars in one day. The Mars Orbiter Camera (MOC) aboard the MGS consists of a narrow-angle camera and two wide-angle red and blue cameras. The wavelength ranges of the two bands are 575–625 nm and 400–450 nm, respectively [
17]. The MOC’s wide-angle red and blue cameras (WAR and WAB, respectively) offer a resolution range of 0.25 km to 1.5 km. However, due to downloaded image rate limitations, the spatial resolution is 7.5 km [
14]. MGS MOC data are divided into four mission phases, each approximately one Martian year in length: “M” (MY24Ls = 150° − MY25Ls = 111°), “E” (MY25Ls = 111° − MY26Ls = 116°), “R” (MY26Ls = 117° − MY27Ls = 123°), and “S” (MY27Ls = 123° − MY28Ls = 122°) [
18].
Mars Daily Global Maps (MDGMs) are generated by Huiqun Wang [
18]. Based on the red and blue wide-angle MOC images, which can continuously image the Martian surface, the authors calibrated the strip images and removed the high-frequency brightness variations and some image preprocessing problems. Then, the continuous red- and blue-band global map strips were projected and spliced. The resulting stitched image had a resolution of 0.1° × 0.1°, with a spatial resolution of approximately 6 km at the equator [
18]. The MOC MDGMs are divided into three maps: the nonpolar map (60°S–60°N), north polar map (45°N–90°N), and south polar map (45°S–90°S). To make the north polar map in the MDGMs, the average brightness of the relatively cloud-free region between 57.5°N–60°N and 90°W–180°W was normalized, and then the same linear stretch was applied to all red maps and blue maps. The 1/3 red map and 2/3 blue map were combined to construct the green map, and then a common linear stretch was applied [
18].
Although the MGS stopped operating more than 10 years ago, this does not affect the use of MGS MOC MDGM data to test the proposed method, which can also be applied to other data within the visible spectral band. In this study, the MOC MDGM north polar map with the areocentric longitude of the Sun (Ls) from 0°–90° in MY25, 26, and 28 was used to extract the ice cap. The data preprocessing included the following steps:
- (1)
Removing problem images: Since the MOC data have missing images during splicing, some images of the MDGMs after splicing have vacancies, and the missing images in the three Martian years of MY25, MY26, and MY28 were eliminated. The numbers of Ls files and MDGMs are different in some months, so we interpolated the Ls values of the missing parts in each month.
- (2)
Maximum synthesis: Since some months of Mars have long-lasting dust storms, which obscure the ice caps, maximum synthesis was employed to remove the effect of dust storms in the image. The reflectivity of the dust storm in the blue band is significantly lower than that of the ice cap. Thus, the maximum value synthesis preserves the RGB band of the day with the largest DN value in the blue band within five days of each pixel. Most of the dust storms covering the North Pole ice cap were removed via the five-day maximum synthesis.
- (3)
Median filter: There was noise in the image, which needed to be eliminated before any segmentation operation, and the median filtering method with a 3 × 3 template was used to eliminate the noise.
2.1.2. DEM
The MGS MOLA DEM data with a spatial resolution of 463 m per pixel were downloaded from the USGS official website, providing a digital elevation model generated by the Mars Orbiter Laser Altimeter (MOLA) carried on the Mars Global Surveyor (MGS) [
19]. In this study, DEM data were utilized to explore the relationship between elevation and ice cap ablation. The 45°N–90°N portion of the DEM data was cropped and reprojected to the projection of the MOC north polar MDGMs, and then resampled to a spatial resolution of 0.1° × 0.1°.
2.2. Automatic Martian Polar Ice Cap Extraction Algorithm
The accuracy of threshold segmentation using a single band cannot be guaranteed, and although supervised classification of hyperspectral data can improve the classification accuracy, it has limitations in processing speed. Therefore, we selected and constructed a feature set capable of distinguishing the Martian ice cap from other coverage types, and then we filtered and enhanced the feature set. Subsequently, we investigated the fast remote sensing extraction algorithm for Martian ice caps by combining the binary segmentation algorithm to improve efficiency, on the premise of ensuring the accuracy of ice cap extraction. In our study, we primarily utilized a combination of ENVI and MATLAB for developing the algorithms and performing data analysis.
2.2.1. Color Systems
As mentioned in
Section 2.1.1, RGB data were used in this study. Although the green band was not observed but was constructed by combining the red and blue bands, in order to construct more features, the green band was still considered as a band for feature selection. Nonetheless, identification of ice caps solely through RGB bands proves challenging. To search for suitable parameters to construct a new feature index, the HSV color system was also investigated. The HSV color system, in which H represents hue, S denotes saturation, and V indicates value, was proposed in 1978 [
20]. HSV is a hexcone model transformed from the RGB cube [
21]. Compared with the RGB color system, HSV is more related to human vision in terms of color sensitivity [
22,
23]. More importantly, HSV shows more robust results to luminance changes and shadow effects than RGB, which has three channels that are attached to brightness [
24]. Therefore, the HSV color system is more suitable for segmentation, especially for some data with complex backgrounds [
25]. The functions of each channel of HSV are calculated as follows:
2.2.2. Feature Index Construction
To develop an automated segmentation method, a well-built feature set is essential. We considered constructing a feature set capable of distinguishing ice caps from other objects, including bare land and clouds. Although the ice caps on Mars are a mixture of H
2O ice and CO
2 ice, the CO
2 ice and H
2O ice are not separated in this study because their reflectivity is similar, making them difficult to distinguish in the visible spectral range [
16,
26,
27]. CO
2 ice and H
2O ice may be distinguished using the thermal IR band, but its instantaneous spatial coverage is relatively low [
28].
To determine the characteristics of the ice cap that distinguish it from other objects, we selected the same amount of regions of interest for the ice cap, bare land, and clouds from three north polar MOC MDGMs of MY25 with Ls 89.2°, Ls 47.55°, and Ls 0.97°, respectively. Then, we drew histograms and stacked graphs, and we calculated the Jeffries–Matusita (JM) distance for judgment based on the regions of interest selected above. When selecting regions of interest in the image, we selected them evenly in each position of the image, and the number of each object type was roughly the same to ensure that the statistics were representative.
The JM distance statistic has been widely applied in remote sensing and image analysis for feature selection and classification tasks. The JM distance, which can range between 0 and 2, takes into account the statistical differences between classes and can effectively discriminate between different classes [
29,
30,
31]. The JM distance (
J) between two classes
and
that are members of a set of C classes (
i,
j = 1, 2, …, C,
i ≠
j) has been defined as follows [
32]:
where
is the Bhattacharyya distance between classes
and
. Usually, the multivariate normal distribution is assumed, and the Bhattacharyya distance takes the following form:
where
and
denote the mean values and
and
denote the covariance matrices of the classes
and
, respectively. The superscript
denotes the transpose of a matrix.
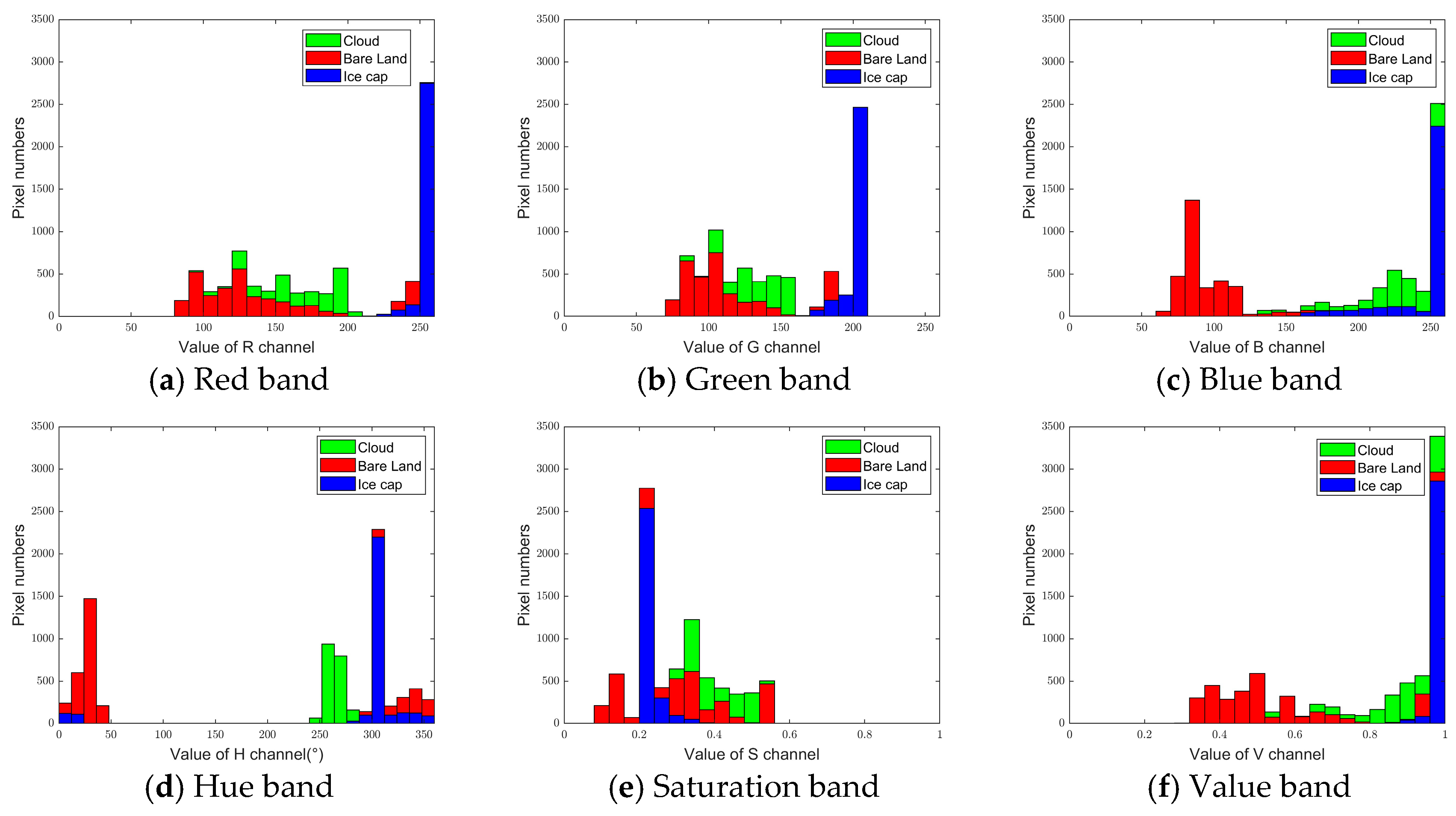
Figure 1 shows the RGB and HSV stacked graphs of typical regions of the ice cap, bare land, and clouds in the north polar MOC MDGMs.
Table 1 shows the JM distances between different objects in the RGB and HSV bands. Since bare land and ice cap account for the largest proportion in the image, the separability between the two should be considered first. Across the four bands of R, G, B, and V, the JM distance between the ice cap and the bare land exceeds 1.8, indicating robust separability. Among them, the JM distance between the ice cap and the bare land of the blue band is the largest, implying the highest separability. Conversely, for the H and S bands, the JM distance between the ice cap and bare land falls below 0.9, indicating poor separability. Particularly, the H band exhibits the smallest JM distance, indicating the poorest separability. As shown by the blue-band stacked graph, the ice cap has higher reflectivity in the blue band, while the bare land has lower reflectivity. However, the JM distance between the ice cap and clouds in the B band is small, so it is difficult to distinguish the ice cap from clouds using only the blue band. On the basis of considering that the blue band is beneficial for distinguishing bare land and ice cap, we further considered the separability between the ice cap and clouds in other bands. Across the R, G, and S bands, the JM distance between the ice cap and clouds exceeded 1.67, indicating good separability. Conversely, the JM distance across the B, H, and V bands fell below 1.2, indicating poor separability. Further examination revealed that the S band displayed relatively small cloud values, with a more concentrated range compared to the R and G bands. This characteristic facilitates the construction of an index with distinct bimodal characteristics. Additionally, analysis of the S-band stacked graph indicated lower saturation of the ice cap and higher saturation of clouds and some bare land, enabling differentiation of the ice cap from high-saturation objects. In conclusion, the reflectance of ice in the RGB band is high, and the change in the RGB band is small; the reflectance of bare land in the RGB band is relatively low, and the change in the RGB band is small; and the reflectance of clouds in the RGB band is relatively high, and the change in the RGB band is relatively large. Therefore, the blue band and S channel were selected as the features to distinguish the ice cap from other objects.
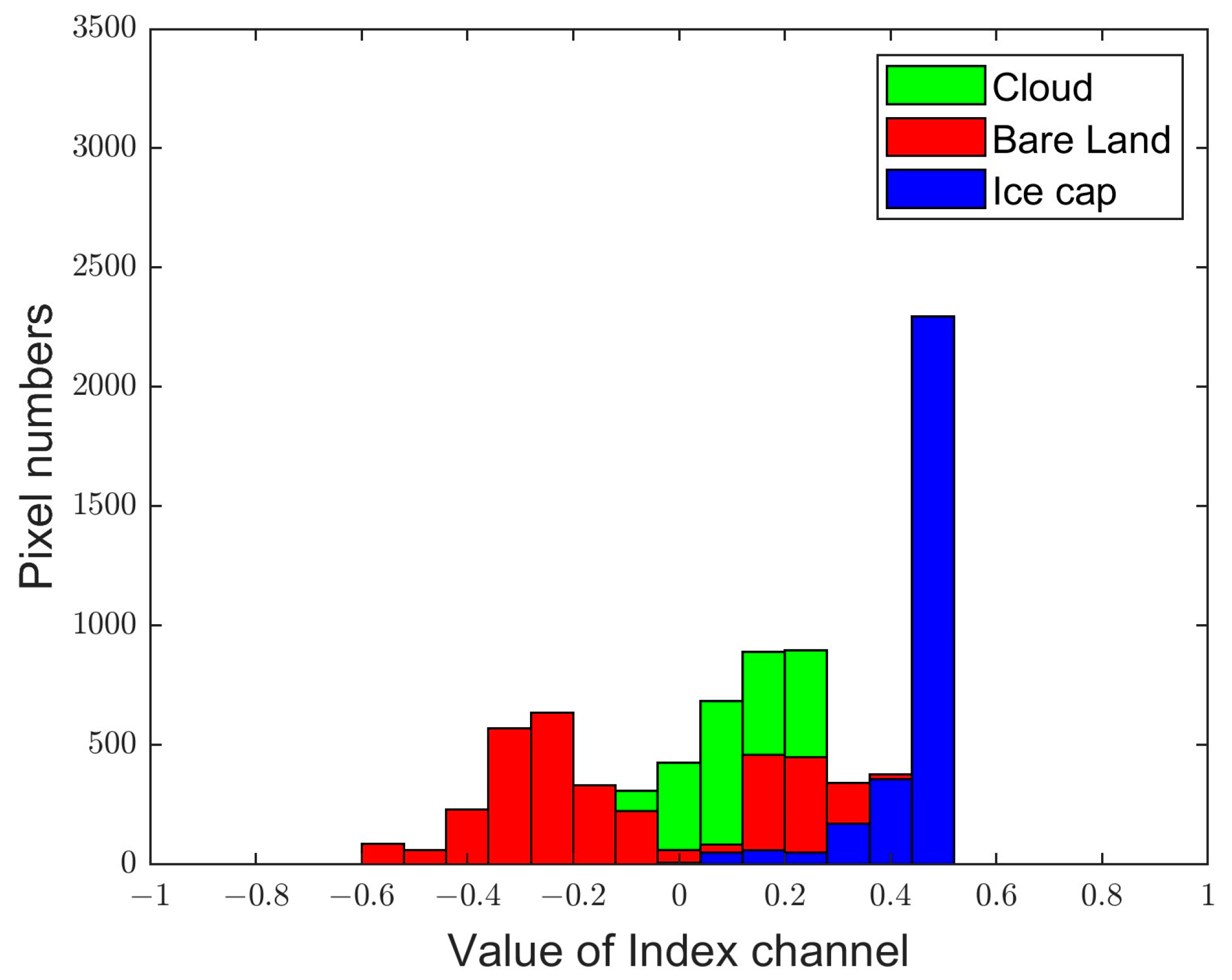
According to the two features of the ice cap, the relatively high reflectivity in the blue band and the low saturation in the RGB band, the blue band and the saturation S channel were selected to construct the normalized index to highlight the difference between the ice cap and other objects. At the same time, since the value range of the saturation S channel was [0, 1], it was necessary to stretch the reflectance value of the saturation S channel to [0, 255]. The formula of the index is presented as follows:
Figure 2 shows the index stacked graph of the ice cap and other objects selected from the MOC MDGMs. The index can distinguish the ice cap from other objects, including bare land and clouds.
2.2.3. Otsu Segmentation Algorithm
After constructing the characteristic index, Otsu’s method was chosen as the binary segmentation method for extracting the ice cap. The Otsu algorithm is a classic segmentation method that automatically selects the global threshold value according to the distribution of the gray level in its histogram [
33]. The main idea of this algorithm is to determine the optimal threshold that can maximize the variance between the target and the background, and it has better accuracy results when applied in remote sensing classification [
34,
35,
36]. The Otsu algorithm can select appropriate segmentation thresholds for images with obvious bimodal features in histograms, but it has poorer results for features with unimodal or inconspicuous bimodal histograms. Therefore, it is necessary to construct features with obvious bimodal characteristics to distinguish the ice cap from other objects [
37].
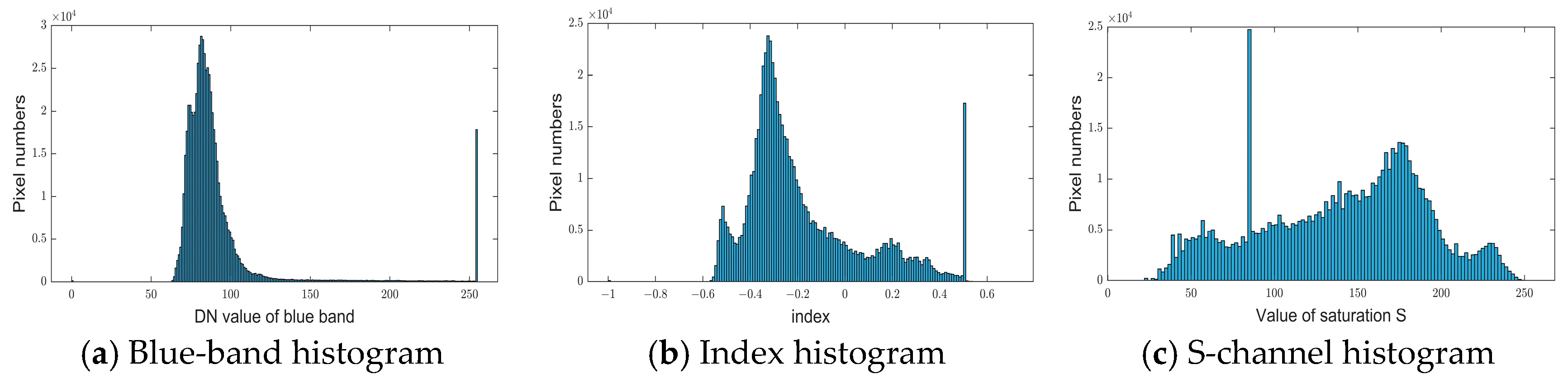
To further investigate the ability of the constructed index to distinguish the ice cap from other objects, an image taken at Ls 89.2°, when there were almost no clouds, was selected. The Otsu method was then applied to this image.
Figure 3 shows the blue band, index, and saturation S-channel histograms of the MY25 and Ls 89.2° MOC MDGM images. The blue-band histogram has obvious bimodal characteristics, and the proposed index histogram shows bimodal characteristics. Since the feature shows good bimodality and the Martian North Pole ice cap occupies a moderate proportion of the entire image, Otsu’s method is suitable to perform automatic segmentation for this feature.
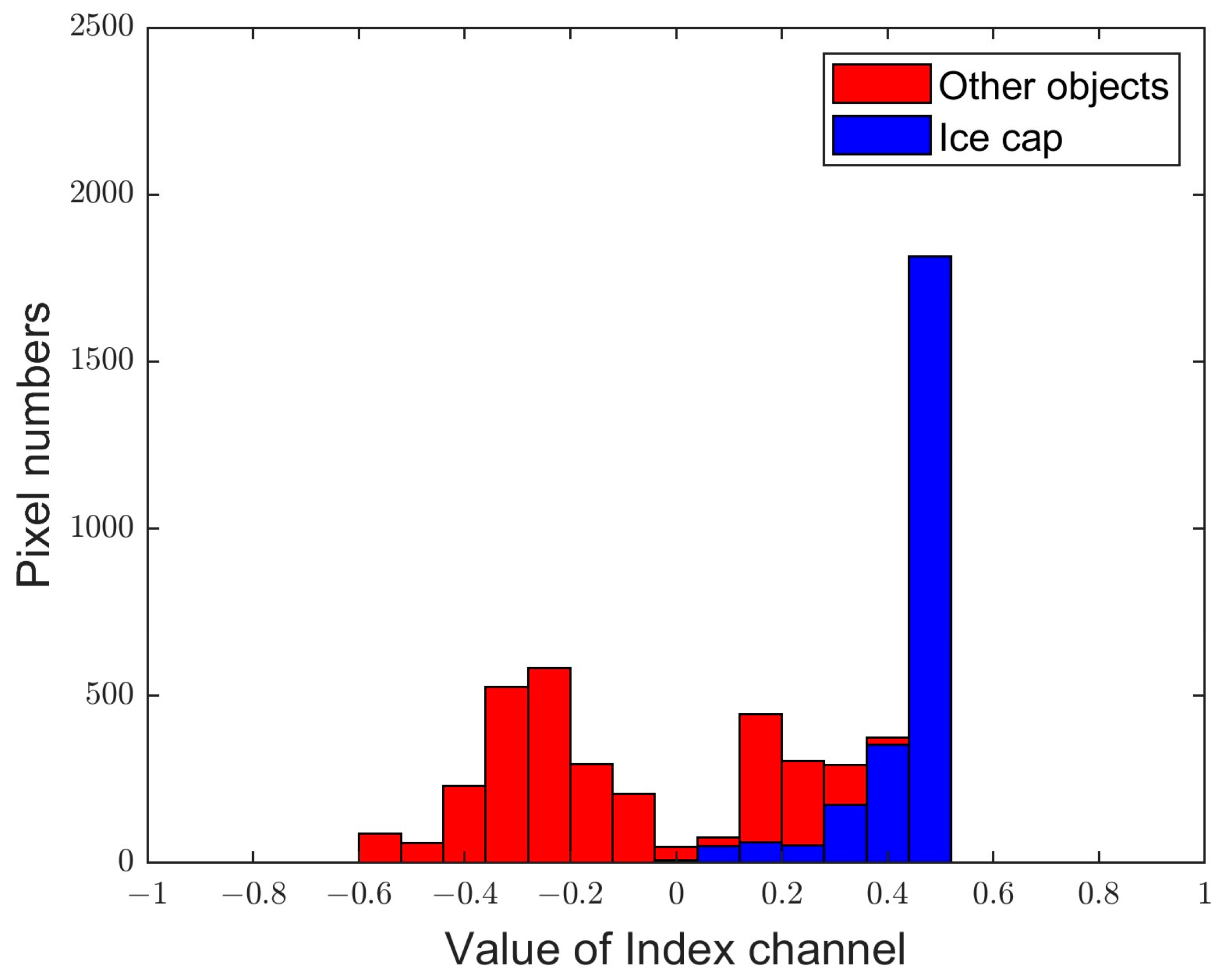
By utilizing the Otsu segmentation method and analyzing the histogram, we further assessed the separability of objects. In
Figure 4, the blue-band histogram represents the ice cap result after applying the Otsu segmentation method to the image index. Based on the analysis of the blue-band histogram of the ice cap result segmented using the index Otsu method, it can be observed that the index Otsu method successfully eliminates a significant portion of low- and medium-brightness objects. This indicates that the index-based segmentation approach is feasible for distinguishing ice from other objects. However, some low-brightness objects persist in the segmentation result, indicating a need for further refinements to enhance its effectiveness in eliminating all low-brightness objects.
Figure 5 shows the index stacked graph distribution of the ice cap and other objects selected in the MY25 and Ls 89.2° MOC MDGM images. It appears that ice caps partially share the same index values with other objects. The reason for this is that a small portion of low- and medium-reflectivity bare land segmented by the Otsu index method experiences minimal changes in the visible light spectrum. As a result, solely relying on the normalization index makes it challenging to differentiate between bare land and all ice caps. To remove the low-reflectivity bare land in this part of the ice cap, we attempted to combine the blue band and index for Otsu method segmentation. This approach takes advantage of the high-reflectivity characteristics of the ice cap in the blue band.
In conclusion, the blue band is better at distinguishing ice caps from low-reflectivity bare ground. The constructed index has advantages in distinguishing clouds and ice caps. However, the two both have some shortcomings, so it is necessary to combine the advantages of the two features to improve segmentation accuracy. At the same time, the effect of the Otsu method is based on the histogram distribution of the image. Different combination methods of the two features will cause differences in the histograms, which will affect the results. In addition, the above analysis is based on the histogram of partial regions of interest selected in the image, and the effect needs to be further evaluated based on the actual image. Therefore, it is necessary to compare and select an automatic Martian polar ice cap extraction algorithm with the best actual effect. Afterward, we compared the four methods that rely only on the blue band or index for Otsu method segmentation or the combination of the blue band and index for Otsu method segmentation to obtain the best method.
The study compared four different methods for segmentation. The first method, namely, the blue-band Otsu method, applies the Otsu method to segment the blue band in the image. The pixels with higher values in the blue band are considered to belong to the ice cap. The second method, namely, the index Otsu method, applies the Otsu method to segment the index in the image. The pixels with higher values are considered to belong to the ice cap. The third method is the index Otsu method with blue-band Otsu method segmentation threshold condition. In this method, the ice cap results are determined by considering the pixels whose values are larger than the thresholds obtained from both the blue-band Otsu method and the index Otsu method. Any other pixels are classified as other objects. The fourth method is using the blue-band Otsu method to divide the ice cap segmented by the index Otsu method. The high-value parts of the index Otsu segmentation results are further divided using the blue-band Otsu method. The resulting high-value parts after two divisions are considered to belong to the ice cap, while the remaining parts are classified as other objects. By comparing the results obtained from these four methods, this study aims to identify the most effective approach for accurately segmenting the ice cap and distinguishing it from other objects.
2.3. Accuracy Assessment Method
In terms of the indicators of accuracy verification, the false-negative rate (FNR), false-positive rate (FPR), and accuracy rate (AR) were chosen as model evaluation indicators. The expression formulae of these three evaluation indicators are presented as follows:
where TP represents the positive samples with a positive segmentation result, that is, the correct number of pixels in the ice cap sample; FP denotes the negative samples divided into positive samples, i.e., the number of pixels in the other object sample that are incorrectly misclassified as ice caps; FN indicates the positive samples with a negative segmentation result, i.e., the number of pixels in the ice cap sample that are misclassified as other objects; and TN represents the negative samples with a negative segmentation result, that is, the number of correctly segmented pixels in the other object sample. The false-negative rate (FNR) indicates the proportion of the ice cap samples that are divided into the other objects, the false-positive rate (FPR) indicates the proportion of the other object samples that are divided into the ice caps, and the accuracy rate (AR) indicates the proportion of correctly classified pixels in the verification samples.
2.4. Analysis of Spatiotemporal Change Characteristics and Their Driving Force
Based on the ice cap extraction algorithm with the best classification accuracy, the MOC MDGM Martian North Pole ice caps with Ls between 0° and 90° in MY25, 26, and 28 were extracted. Then, the ice cap ablation boundary of each image was extracted by the image morphology method based on the extracted ice cap results. According to the obtained ice cap extraction results and the ice cap ablation boundaries, we further conducted spatiotemporal analysis to explore the changing characteristics of ice cap ablation. First, the ice cap ablation boundary map every 10° Ls was drawn to analyze the spatial variation characteristics in MY25, 26, and 28. Second, the North Pole ice cap area and the average latitude of the North Pole ice cap ablation boundary in the three Martian years were linearly fitted with Ls to analyze the ice cap ablation variation trend. According to the coefficients of linear fitting, we can roughly estimate the rate of ice cap ablation. Lastly, we explored how solar radiation and elevation drive ice cap ablation. Because the solar radiation received by the Northern Hemisphere gradually increases with increasing Ls from 0° to 90°, the influence of Ls can be considered to be the influence of solar radiation. By observing the relationships among the ice cap area, ice cap ablation boundary, and Ls, the influence of solar radiation on ice cap ablation was analyzed. Then, to explore the effect of elevation, the correlation coefficient between the extraction results at the average latitude of the ice cap ablation boundary and the DEM at each Ls was calculated to analyze the relationship between the elevation at the same latitude and the ice cap ablation. Generally, a correlation coefficient above 0.7 indicates a very close relationship, a correlation coefficient between 0.4 and 0.7 indicates a close relationship, and a correlation coefficient between 0.2 and 0.4 indicates a general relationship. According to the change in the correlation coefficient with Ls, the relationship between DEM and ice cap ablation at different Ls can be judged.
3. Results
3.1. Classification Accuracy
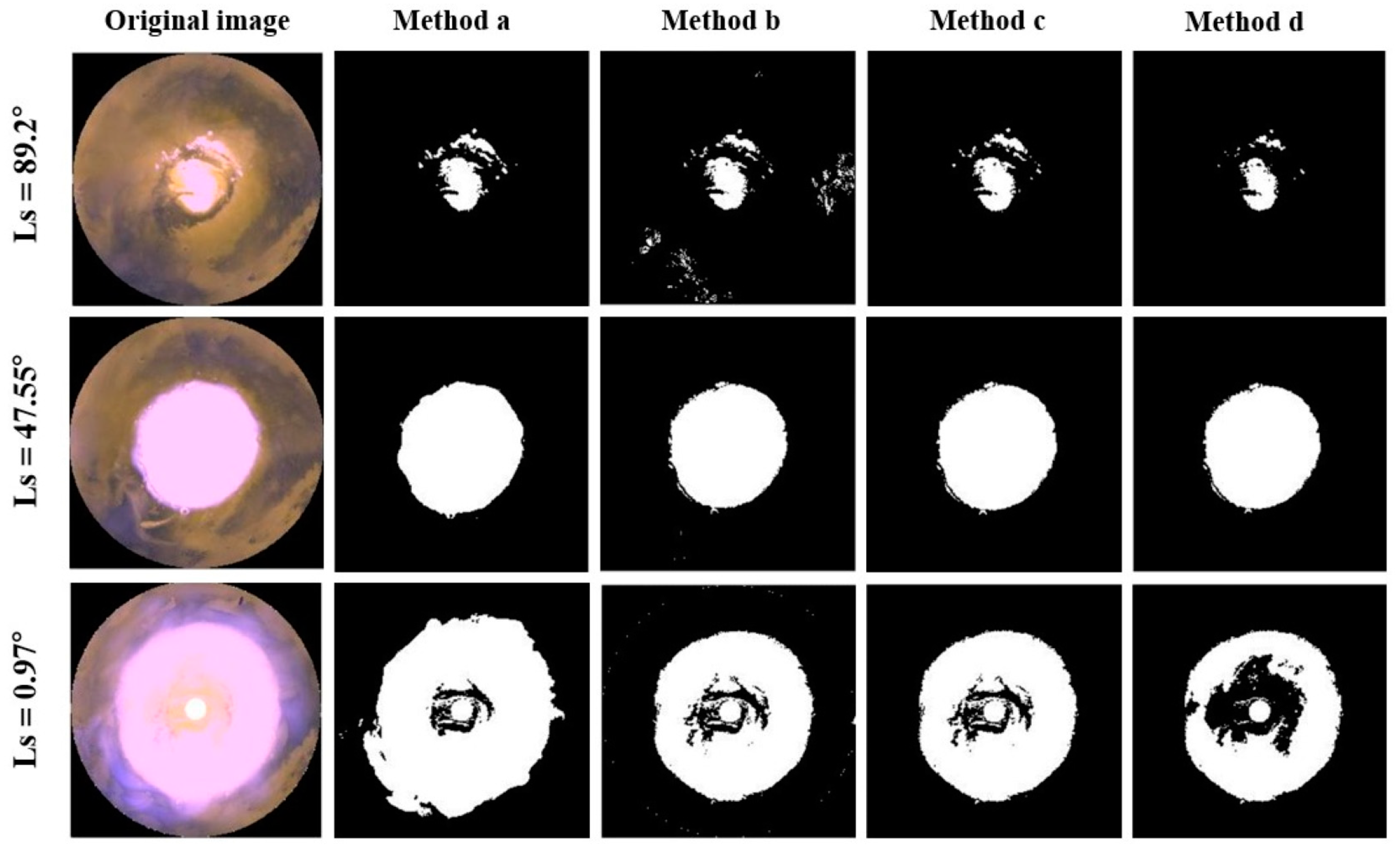
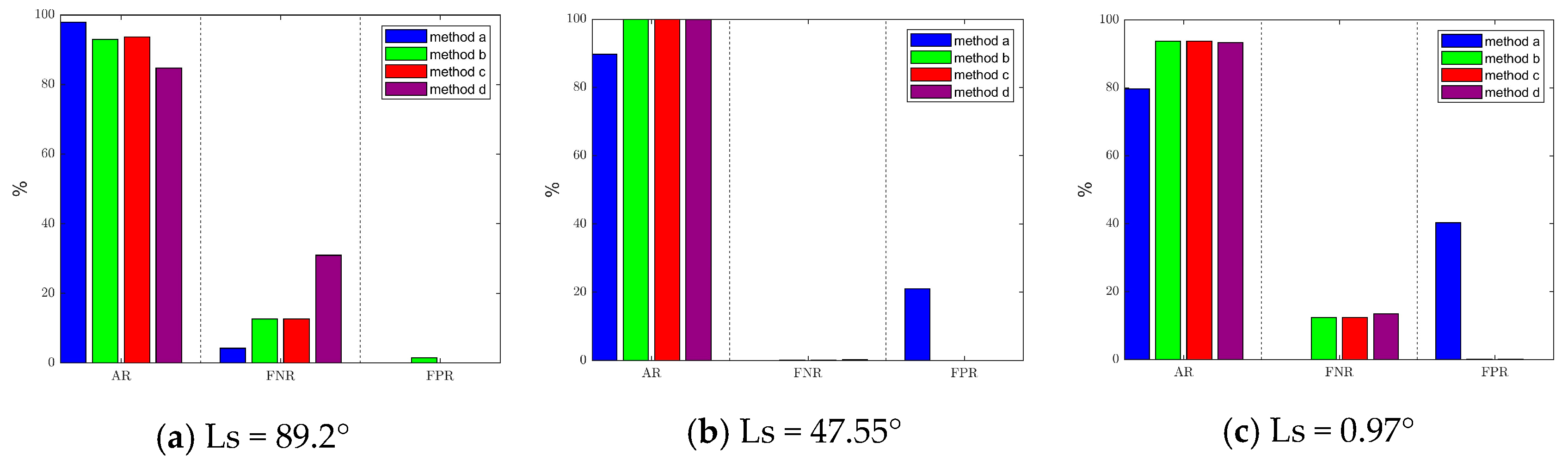
The three images with MY25 and Ls of 89.2°, 47.55°, and 0.97° were chosen to verify the segmentation accuracy of the four methods. Through visual interpretation, we selected roughly equal ice cap pixels and bare land pixels as the accuracy verification samples. The classification results and accuracy are shown in
Table 2 and
Figure 6 and
Figure 7.
According to the accuracy results, it is evident that the blue-band Otsu method performs well in classifying pixels when there is no influence from clouds. This method effectively distinguishes the ice cap, characterized by high reflectivity, from the low-reflectivity bare land in the blue band. Specifically, when Ls = 89.2°, the segmentation accuracy rate (AR) reaches 97.92%. However, the blue-band Otsu method cannot distinguish between ice caps and clouds. As shown in
Figure 6 with Ls 0.97° and
Table 2, clouds with high reflectivity in the blue band were misclassified as ice caps, with an FPR greater than 40% and an AR of 79.69%.
The effect of the index Otsu method is good. Due to the consideration of the high reflectance of the ice cap in the blue band and the low saturation of the RGB band, this method can separate the ice cap from clouds and most bare land, the classification AR of the three images exceeds 90%, and the overall segmentation accuracy is improved. However, the Otsu index method will misclassify a small amount of low-reflectivity and low-saturation bare land in mid-latitudes as ice caps, resulting in a decrease in accuracy, as shown in
Figure 6 with Ls 89.2° and
Table 2, with an AR of 92.95%.
The index Otsu method with the blue-band Otsu method segmentation threshold condition has the best classification effect among the four methods. This method removes bare land with low reflectivity in mid-latitudes, and its accuracy is higher than that of the index Otsu method. The classification AR in several images was greater than 93%.
Using the blue-band Otsu method to divide the ice cap segmented by the index Otsu method also removes bare land with low reflectivity in the mid-latitudes, but sometimes the ice cap is misclassified as other objects, as shown in
Figure 6 with Ls 89.2° and
Table 2, with an AR of 84.72%. The reason for this is that the proportion of the ice cap in the index segmentation results is too high, and the effectiveness of Otsu threshold segmentation will be reduced [
38].
In general, the blue-band Otsu method can distinguish objects with high reflectance in the blue band and remove objects with low reflectance. However, its performance diminishes when clouds are present in the image, resulting in a lower AR. For the Otsu index method, the segmentation accuracy is improved, reaching higher than 90%, but some bare land with low reflectivity and low saturation will be incorrectly divided into ice caps, resulting in a decrease in AR. When the blue-band threshold condition is added to the index Otsu method, the FPR decreases, the AR is higher than that of the index Otsu method, and the overall segmentation effect is the best. Using the blue-band Otsu method to divide the ice cap segmented by the index Otsu method reduces the AR due to the high proportion of the ice cap after the first segmentation.
After comprehensive considerations, the index Otsu method with the blue-band Otsu method segmentation threshold condition was selected as the MOC MDGM ice cap extraction algorithm. This algorithm was applied to the following analysis.
3.2. Temporal and Spatial Variations in Ice Cap Ablation
Based on the selected ice cap extraction algorithm above, we extracted the ice cap in the Northern Hemisphere MDGMs with Ls between 0° and 90° in MY25, 26, and 28. Then, we calculated the ice cap area and extracted the ice cap ablation boundary. The ice cap ablation boundary was obtained by combining the erosion, dilation, image connectivity, and Sobel edge extraction methods.
3.2.1. Analysis of Spatial Characteristics
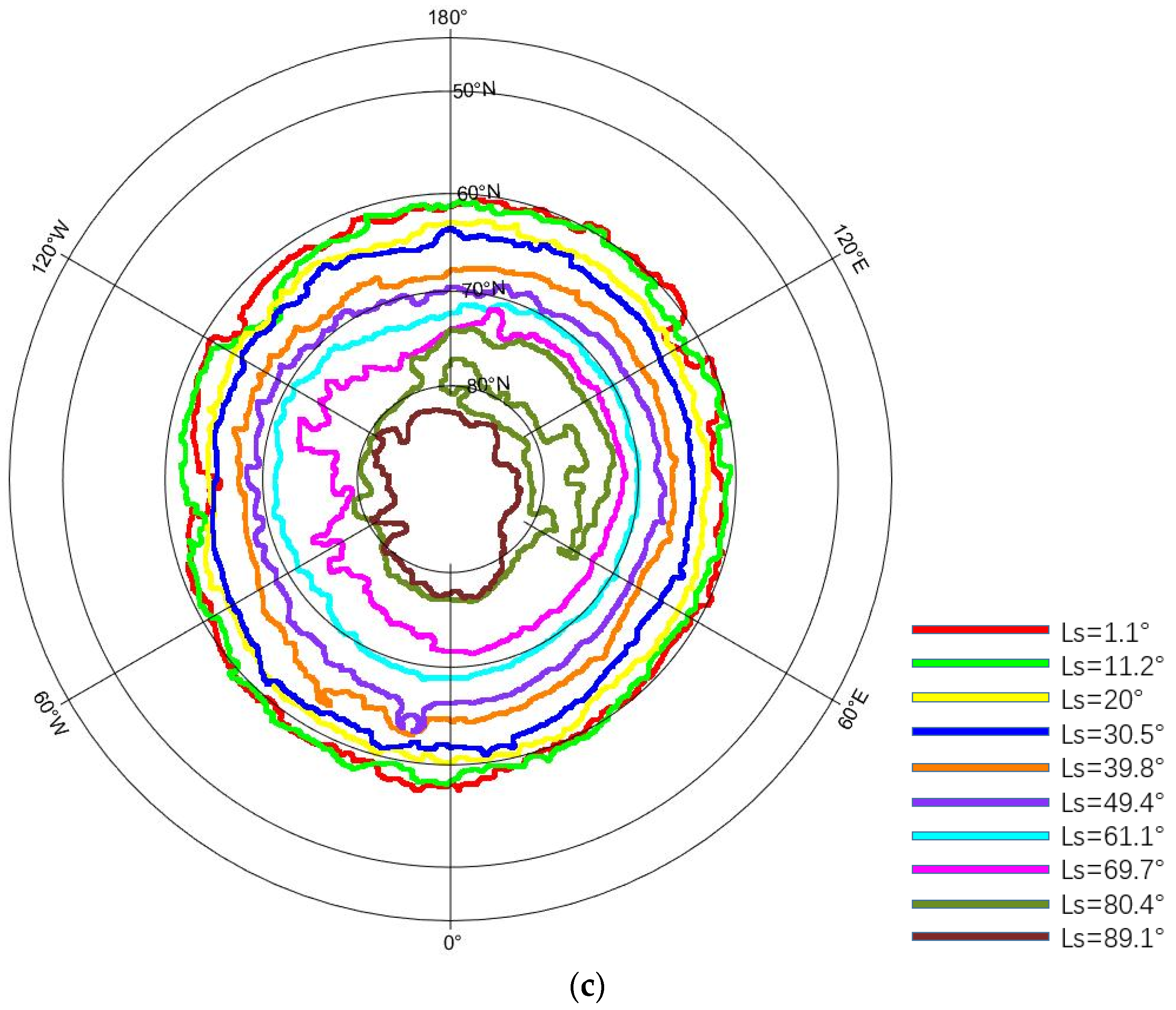
Figure 8 shows schematics of the change in the ablation boundaries of the MY25, 26, and 28 Martian north polar ice caps from the spring equinox to the summer solstice.
Figure 9a–c show that in MY25, 26, and 28, Ls gradually decreased from 0° to 90°, and that the seasonal ice cap gradually ablated. The spatial distribution of ice cap ablation in the three Martian years was similar, and it can be speculated that the atmospheric environment of Mars has not significantly changed in the past three years. When Ls ranges from 0° to 10°, there is no significant change in the ablation boundary of the ice cap. When Ls ranges from 10° to 60°, the ablation boundary of the ice cap is roughly circular and more uniform, with a relatively stable retreat rate along the latitude. Between Ls 70° and 90°, the ablation boundary reaches the circumpolar dune field. The ablation boundary of the ice cap is no longer a regular circular shape. The ablation speed between 60°W and 120°W is faster than that between 0°E and 180°E, and it was determined by the DEMs that the elevation of the former is lower than that of the latter. During this period, the ablation boundary retreat rate of the ice cap in MY26 was faster than that in MY25 and MY28. Finally, when Ls reaches 90°, the seasonal ice cap effectively sublimates, and most of the remaining ice cap is permanent.
3.2.2. Analysis of Temporal Characteristics
Based on the ice cap extraction results and the edge extraction method, the change curves of the ice cap area and the average latitude of the ice cap ablation boundary in the three Martian years of MY25, 26, and 28 were obtained.
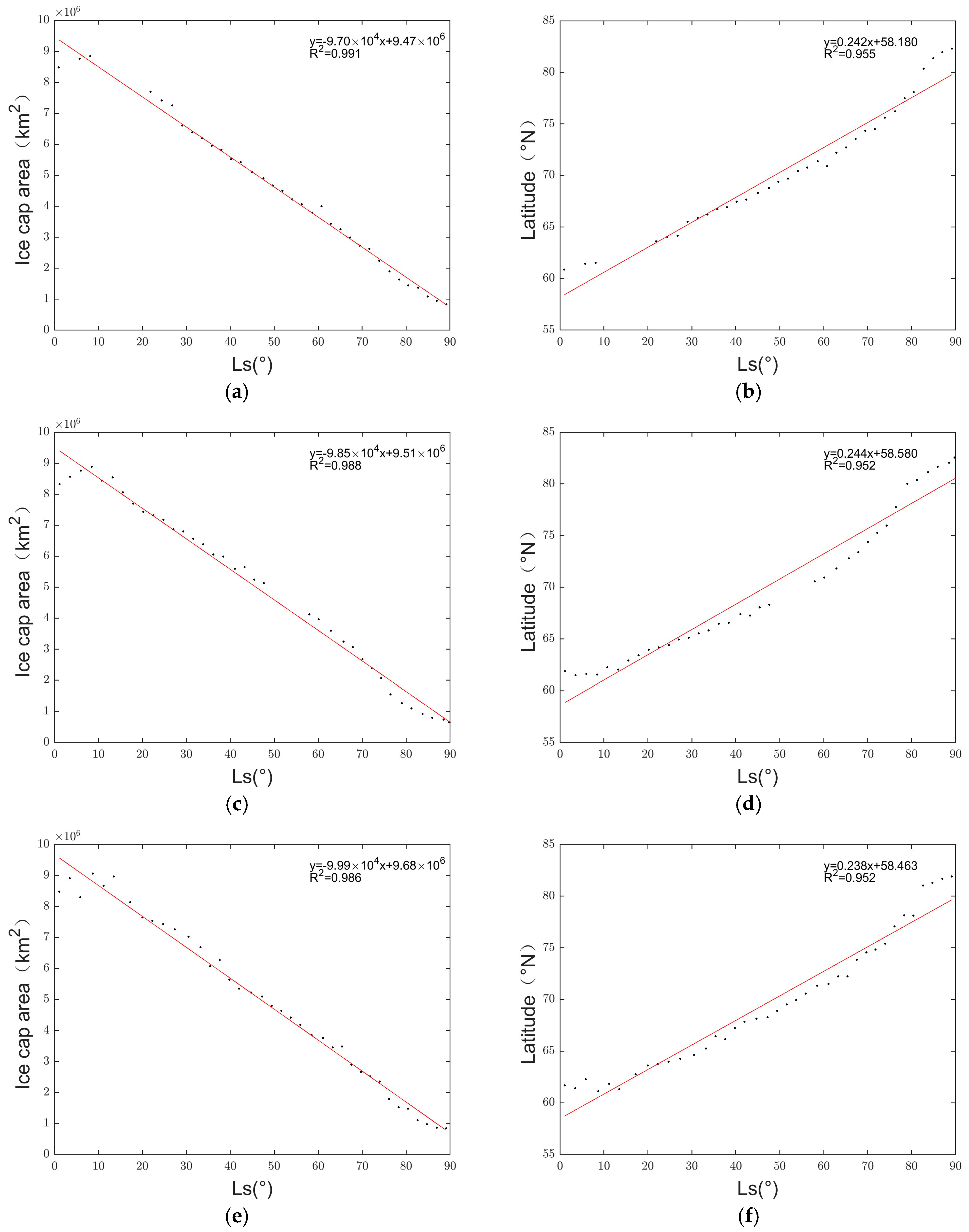
According to
Figure 9a,c,e, in the three Martian years of MY25, 26, and 28, the relationship between the ice cap area and Ls demonstrates an approximate linearity, with the linear fitting R
2 values measuring 0.991, 0.988, and 0.986, respectively, indicating a strong fitting effect. The ablation boundary retreat rate of the ice cap in these three years was approximately the same, and the ice cap sublimated approximately 10
5 km
2 for every one degree of Ls.
Between 0° and 10° of Ls, the ice cap area is small, which is inconsistent with the actual area, because there are large-scale dust storms in the high-latitude area during this period [
39]. Some dust storms near the poles have a long duration, so 5-day maximum value synthesis fails to remove all dust storms, causing the ice cap at high latitudes to be covered by dust storms and classified as other objects.
As shown in
Figure 9b,d,f, the average latitude of the ice cap ablation boundary is approximately the same as the results of the reference and is approximately linear with Ls. The linear fitting R
2 values, measuring 0.955, 0.952, and 0.952, respectively, indicate a strong fitting effect. The change rate of the average latitude of the ice cap ablation boundary in the three years was approximately the same, increasing by 0.24° for every degree of Ls. When Ls ranges from 0° to 10°, the average latitude of the ice cap ablation boundary shows no significant change. Within ranges of 10° to 60°, the average latitude of the ice cap ablation boundary changes at a constant speed. When Ls is from 60° to 80°, the change speed of the average latitude of the ice cap ablation boundary accelerates.
3.3. Analysis of Driving Factors of Ice Cap Ablation
Because the solar radiation received by the Northern Hemisphere gradually increases with increasing Ls from 0° to 90°, the influence of Ls can be considered to be the influence of solar radiation. As shown in
Figure 9, when Ls is between 0° and 90°, the ice cap area and ablation boundary in the Northern Hemisphere of Mars gradually decrease with increasing Ls, that is, with increasing solar radiation. Solar radiation has a greater driving effect on ice cap ablation.
To explore the effect of elevation on seasonal ice cap ablation at the same latitude, we selected an area with an average latitude of ±0.05° of the ablation boundary in each image and conducted a correlation analysis between the ice cap extraction results and the DEM. In the ice cap extraction results, the value of ice cap area is 1, and the value of other objects is 0. That is, a positive correlation in the correlation analysis indicates that the higher the elevation, the greater the possibility that the ice cap will not sublimate, and a negative correlation indicates that the higher the elevation, the greater the possibility that the ice cap will sublimate. The correlation analysis results show that the relationship between the ice cap and the elevation was generally consistent in the three years, as shown in
Figure 10a–c. Between Ls 0° and 50°, whether the ice cap exists at the average latitude of the ablation boundary of the ice cap is negatively correlated with the elevation, with a correlation coefficient of approximately −0.6. This indicates that, during this period, higher elevations are associated with a higher likelihood of ice cap sublimation. According to
Figure 8, during this period, the southern elevation of the average latitude of ice cap ablation is lower, and the ice cap does not sublimate, while the northern elevation is higher, and the ice cap sublimates. It is speculated that the higher the elevation during this period, the greater the solar radiation causing the ice cap to sublimate. Between 50° and 70° of Ls, the correlation coefficient gradually increases from −0.6 to 0.6, indicating a shift in the effect of elevation on ice cap ablation. Specifically, the correlation suggests that as Ls progresses, there is a greater likelihood of ice cap ablation occurring at lower elevations. It is speculated that when the ice cap sublimates to high latitudes, the direct sunlight point cannot reach the high latitudes, leading to an increased influence of ground radiation on ice cap ablation. Consequently, areas with higher elevation are less affected by ground radiation, and ice caps are less likely to ablate. Between 70° and 90° of Ls, the correlation coefficient has a change that first drops and then rises. There is an outlying band of patchy frost deposits from latitudes 75°N to 80°N and from longitudes 90°E to 270°E, and its shape is irregular [
40]. With Ls increasing, the proportion of ice cap at the average latitude of the ice cap ablation boundary first decreases and then increases. The decrease in the proportion of ice cap at the average latitude of the ice cap ablation boundary leads to a decrease in the correlation coefficient. As the proportion of ice cap at the average latitude of the ice cap ablation boundary gradually increases, the correlation coefficient also increases.
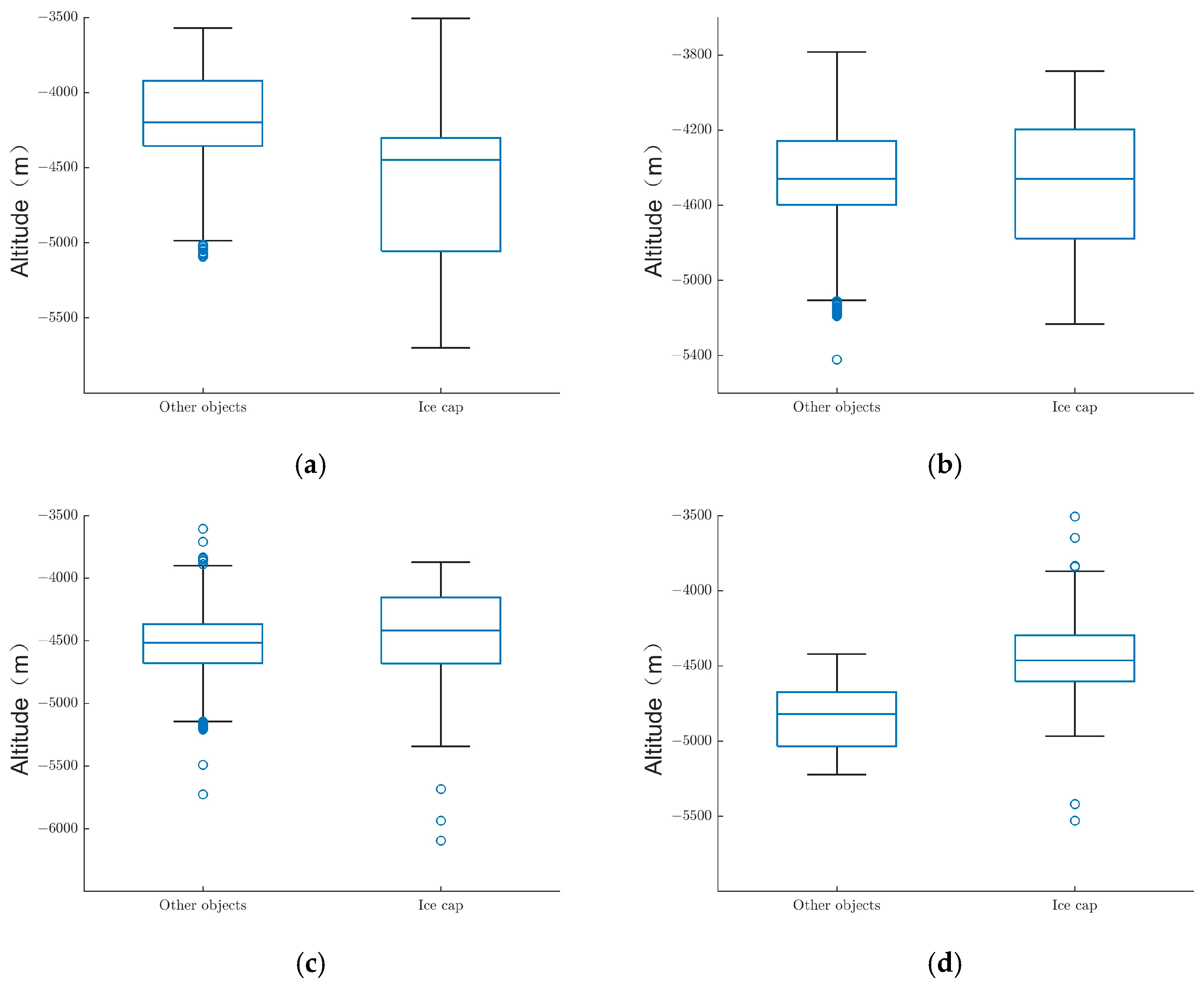
Four images in MY25, with Ls of 40.18°, 56.25°, 60.75°, and 69.45°, were selected to construct box plots from the seasonal ice cap extraction results and DEM near the average latitude of the ablation boundary, as shown in
Figure 11a–d. At 40.18°, the lower quartile of the elevation of the non-ice-cap objects is approximately equal to the upper quartile of the elevation of the ice cap, and most of the elevations of the non-ice-cap objects are higher than the elevation of the ice cap. At 56.25° and 60.75°, there are no significant differences between the ice cap and other objects. At 69.45°, the lower quartile of the elevation of the ice cap is greater than the upper quartile of the elevation of the other objects, and the elevation of most of the seasonal ice cap is higher than that of the other objects, which is consistent with the results shown in
Figure 10.
4. Discussion
The proposed automatic ice cap extraction algorithm can quickly extract Martian ice caps with high accuracy by using the visible spectral band, making it suitable for large-scale applications across Mars. However, this method does have limitations. Specifically, when the proportion of ice cap within an image is either too large or too small, the accuracy of the Otsu method threshold used for extraction may be compromised [
38]. As a result, the proposed algorithm may not be suitable for small-scale images containing either a few or numerous ice caps. The index, constructed by utilizing the high reflectivity in the blue band of the ice cap and the low saturation in the visible spectral band, demonstrates a certain level of ability to distinguish the ice cap from other objects. However, some low-saturation bare land cannot be effectively removed without incorporating the threshold condition of the blue band. Subsequent research could try other indices or certain feature enhancement methods to better distinguish ice caps from other objects by using the visible spectral band. Due to some dust storms near the poles having a long duration between 0° and 10° of Ls, 5-day maximum value synthesis fails to remove all dust storms, causing the accuracy to decrease. We will consider other band data that are not affected by dust storms to remove their effects. At the same time, the proposed automatic ice cap extraction algorithm has been applied to a limited number of datasets, so we will consider using longer time-series datasets in subsequent research. Other or future mission data will use different wavelengths/sensors, such as thermal IR bands, to distinguish CO
2 ice and H
2O ice, so some modification might be required.
In terms of spatiotemporal analysis, we discovered that the spatial distribution of ice cap ablation in the three Martian years was essentially consistent. The boundary range in MY25 is roughly the same as James et al.’s visual interpretation results, showing that automatic extraction results are relatively reliable [
3]. Compared with Zhang et al.’s supervised classification results based on hyperspectral images, the calculated ice cap ablation trend has a higher time resolution and shows more details of changes [
13]. The linear fits of the latitude of the ice cap ablation boundary against Ls in MY25 are provided in
Table 3. Comparing the linear fits of the latitude of the ice cap ablation boundary against Ls in MY25 with other results, the ice cap ablation boundary retreat rates are roughly the same, and the small differences can be attributed to varying methods as well as to the Ls range over which the fit was performed [
3,
4]. In contrast to other studies, it was determined that the ice cap did not significantly sublimate when Ls was between 0° and 10°. The ablation boundary retreat rate along latitude is faster when Ls is between 70° and 90° than when Ls is between 10° and 60°. When Ls ranges between 70° and 90°, the ablation boundary retreat rate of the MY26 ice cap is faster than that of MY25 and MY28. However, the spatiotemporal analysis does not take into account changes in the thickness of the ice cap and cannot calculate the amount of CO
2 entering the atmosphere. If combined with laser altimetry data, the mass or volume of ice cap ablation could be calculated to better study the changes in the Martian ice cap.
In terms of driving force analysis, we discovered that the correlation between the elevation at the average latitude of the ablation boundary and the ice cap ablation greatly varied with increasing Ls. Between 0° and 50° of Ls, other ice cap objects at the mean latitude of the ice cap ablation boundary are negatively correlated with elevation. When Ls is between 50° and 70°, the correlation coefficient gradually increases, and the relationship between the elevation at the average latitude of the ablation boundary of the ice cap and the ablation of the ice cap is gradually positive. However, only the relationship between the elevation at the same latitude and the ice cap ablation was analyzed, and adding data such as air temperature could better explain the differences in ice cap ablation at the same latitude.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}