
GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter


Abstract
1. Introduction
2. System Model
2.1. 5G RTT/AOA Measurement Model
2.2. GNSS Measurement Model
2.2.1. GNSS Pseudo-Range Measurement Model
2.2.2. GNSS Doppler Measurement Model
2.3. Fusion Model
3. Proposed Fused Method for GNSS/5G Position
3.1. Iteration-Residual-Based Adaptive Estimation of
3.2. Innovation-Based Adaptive Estimation of
3.3. Dual Gross Error Detection Based on Mahalanobis Distance
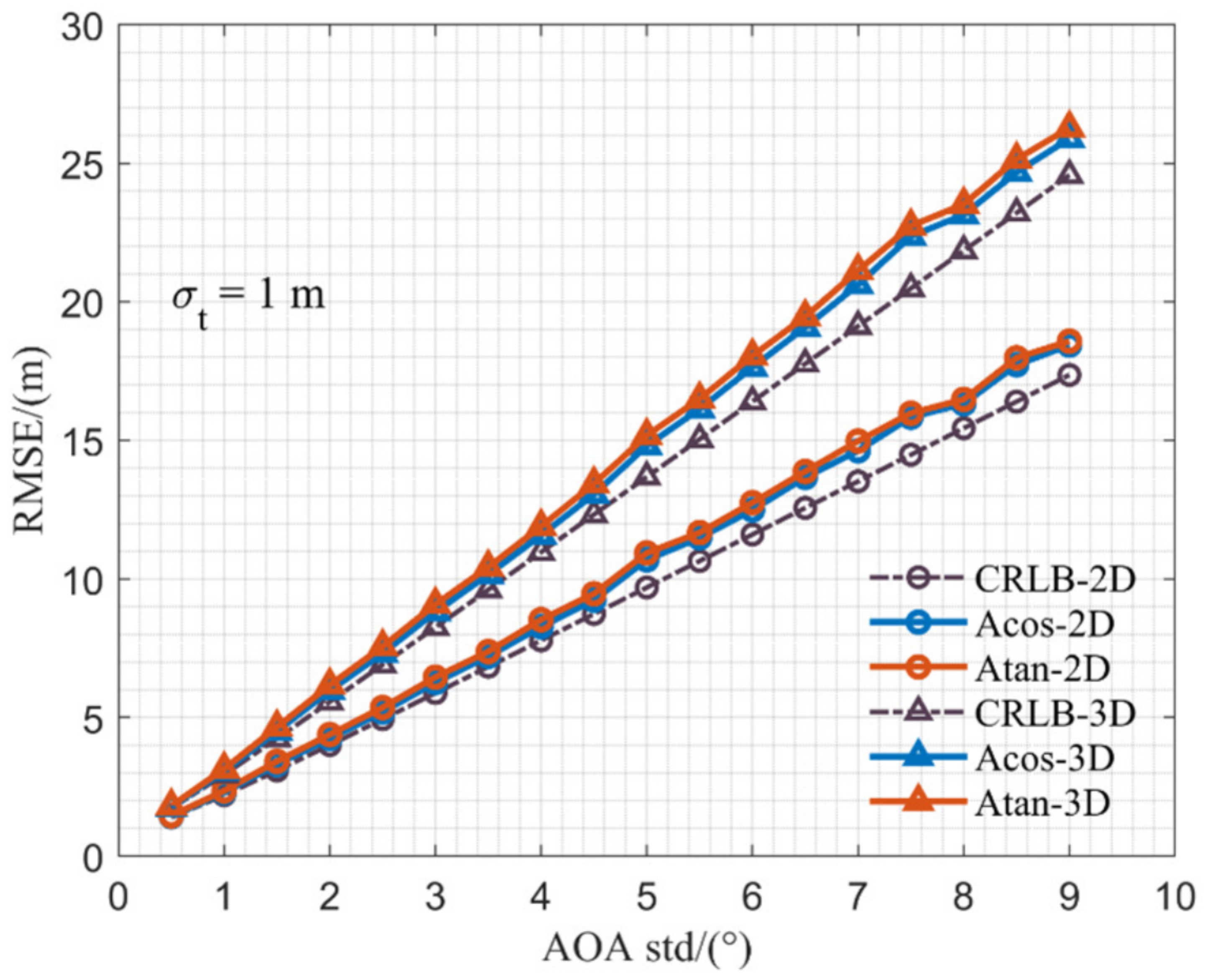
4. Theoretical Analysis Based on Cramer–Rao Lower Bound (CRLB)
4.1. 5G RTT/AOA Parameter Settings Based on CRLB
4.2. Performance Evaluation
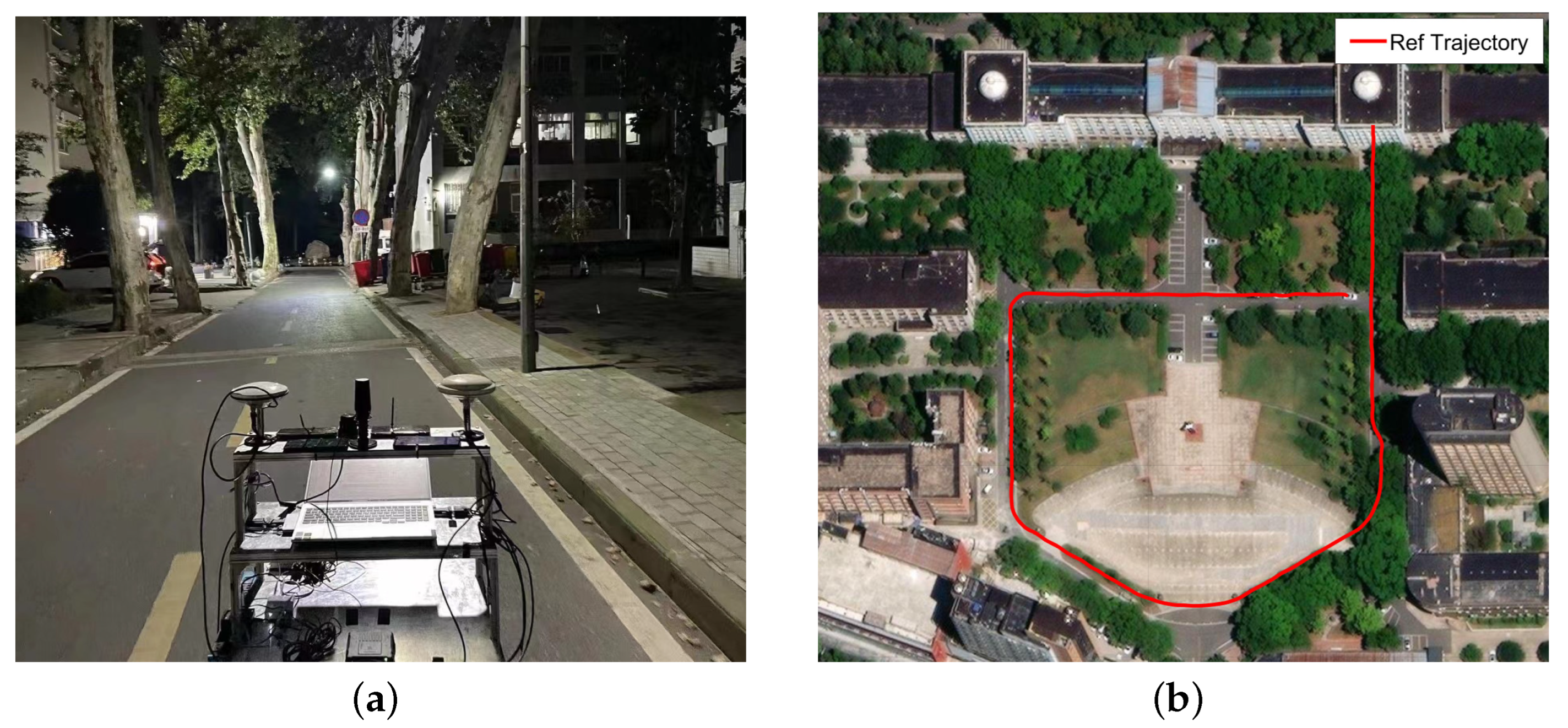
5. 5G/GNSS Semiphysical Experiment
5.1. Experiment Settings
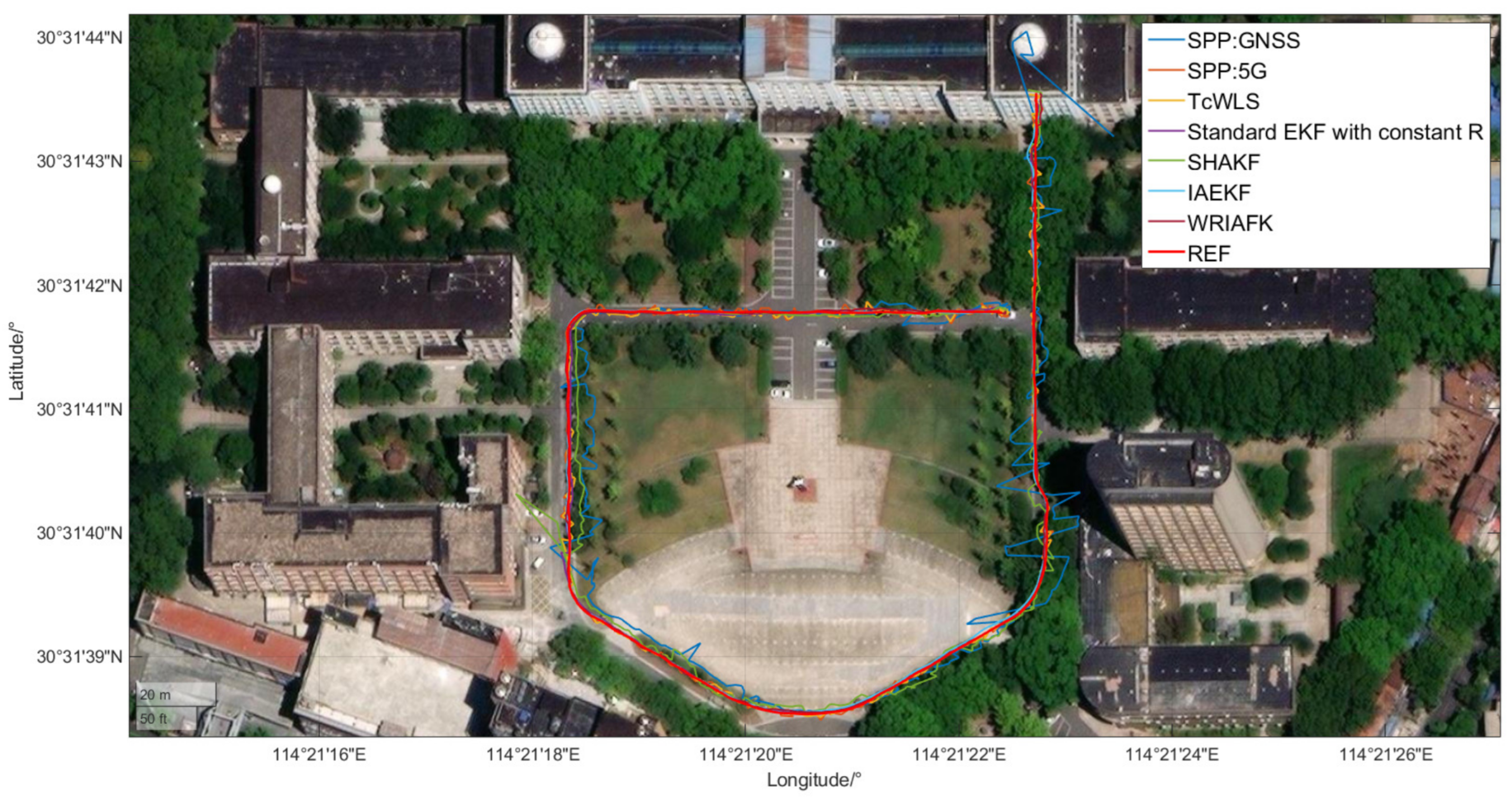
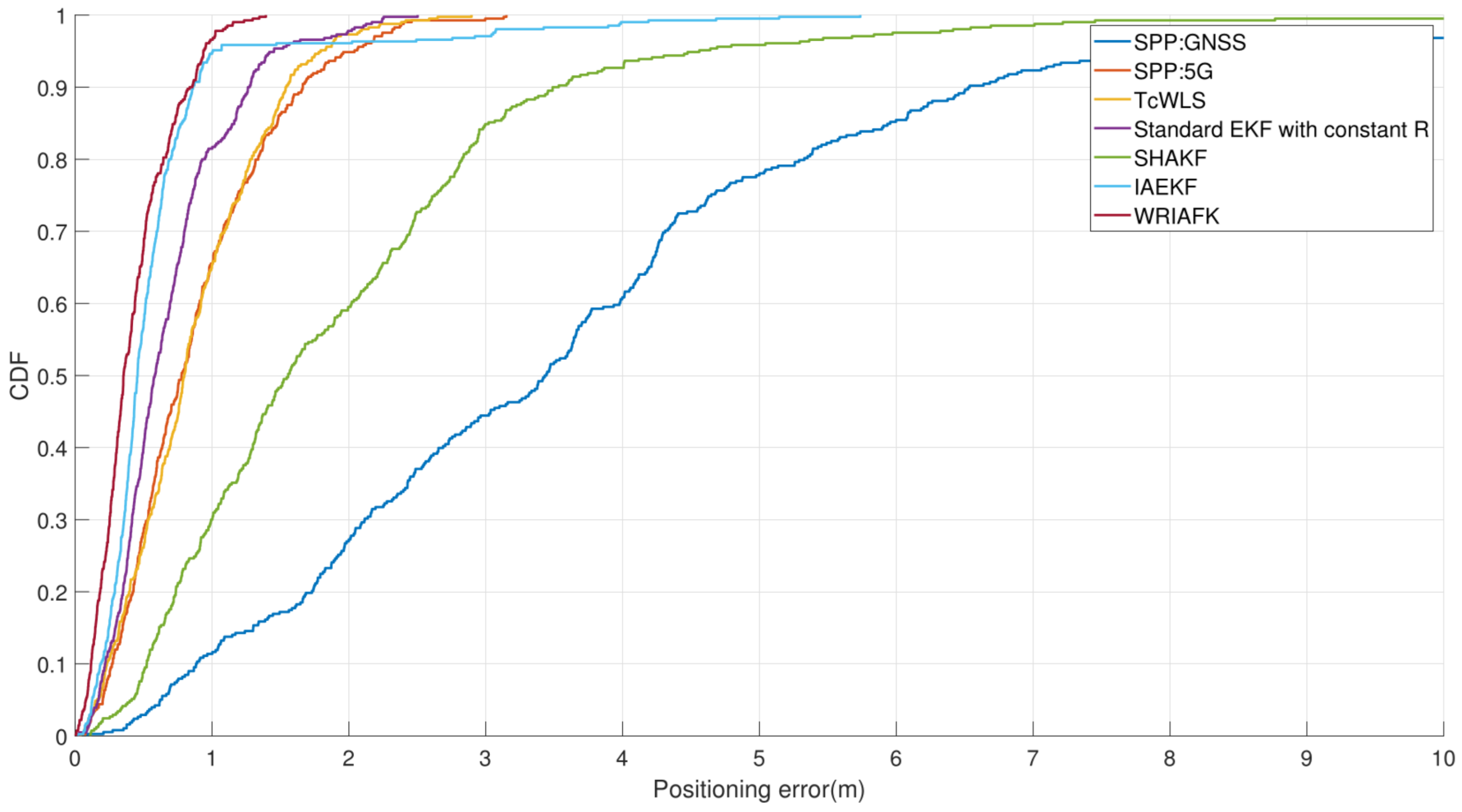
5.2. Performance Evaluation
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013. [Google Scholar]
- Seco-Granados, G.; López-Salcedo, J.; Jiménez-Baños, D.; López-Risueño, G. Challenges in Indoor Global Navigation Satellite Systems: Unveiling its core features in signal processing. IEEE Signal Process. Mag. 2012, 29, 108–131. [Google Scholar] [CrossRef]
- Xu, B.; Jia, Q.; Hsu, L.T. Vector Tracking Loop-Based GNSS NLOS Detection and Correction: Algorithm Design and Performance Analysis. IEEE Trans. Instrum. Meas. 2020, 69, 4604–4619. [Google Scholar] [CrossRef]
- Chen, R.Z.; Chen, L. Indoor Positioning with Smartphones: The State-of-the-art and the Challenges. Acta Geod. Cartogr. Sin. 2017, 46, 1316. [Google Scholar]
- Gakne, P.V.; O’Keefe, K. Tightly-coupled GNSS/vision using a sky-pointing camera for vehicle navigation in urban areas. Sensors 2018, 18, 1244. [Google Scholar] [CrossRef] [PubMed]
- Wen, W.W.; Hsu, L.T. 3d LiDAR aided GNSS NLOS mitigation in urban canyons. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18224–18236. [Google Scholar] [CrossRef]
- Sun, R.; Wang, J.H.; Cheng, Q.; Mao, Y.; Ochieng, W.Y. A new IMU-aided multiple GNSS fault detection and exclusion algorithm for integrated navigation in urban environments. GPS Solut. 2021, 25, 147. [Google Scholar] [CrossRef]
- De Angelis, G.; Baruffa, G.; Cacopardi, S. GNSS/Cellular hybrid positioning system for mobile users in urban scenarios. IEEE Trans. Intell. Transp. Syst. 2012, 14, 313–321. [Google Scholar] [CrossRef]
- Ruan, Y.L.; Chen, L.; Zhou, X.; Guo, G.Y.; Chen, R.Z. Hi-Loc: Hybrid Indoor Localization via Enhanced 5G NR CSI. IEEE Trans. Instrum. Meas. 2022, 71, 5502415. [Google Scholar] [CrossRef]
- 3GPP TS 38.855. Study on NR Positioning Support (Release 16). Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3501 (accessed on 28 March 2019).
- 3GPP RP-223549. New WID on Expanded and Improved Positioning. Available online: https://www.3gpp.org/ftp/Information/WI_Sheet/?sortby=daterev (accessed on 20 June 2023).
- Destino, G.; Saloranta, J.; Seco-Granados, G.; Wymeersch, H. Performance Analysis of Hybrid 5G-GNSS Localization. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 8–12. [Google Scholar]
- Del Peral-Rosado, J.; Saloranta, J.; Destino, G.; López-Salcedo, J.; Seco-Granados, G. Methodology for simulating 5G and GNSS highaccuracy positioning. Sensors 2018, 18, 3220–3244. [Google Scholar] [CrossRef] [PubMed]
- Abu-Shaban, Z.; Seco-Granados, G.; Benson, C.R.; Wymeersch, H. Performance analysis for autonomous vehicle 5G-assisted positioning in GNSS-challenged environments. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 996–1003. [Google Scholar]
- Del Peral-Rosado, J.; Bartlett, D.; Grec, F.; Ries, L.; Chassaigne, A. Physical-layer abstraction for hybrid GNSS and 5G positioning evaluations. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–6. [Google Scholar]
- Sun, C.; Zhao, H.; Bai, L.; Cheong, J.W.; Dempster, A.G.; Feng, W. GNSS-5G hybrid positioning based on TOA/AOA measurements. In Proceedings of the China Satellite Navigation Conference (CSNC) 2020, Chengdu, China, 22–25 November 2020; pp. 527–537. [Google Scholar]
- Hiltunen, T.; Turkka, J.; Mondal, R.; Ristaniemi, T. Performance evaluation of LTE radio fingerprint positioning with timing advancing. In Proceedings of the 2015 10th International Conference on Information, Communications and Signal Processing (ICICS), Singapore, 2–4 December 2015; pp. 1–5. [Google Scholar]
- Ruan, Y.; Chen, L.; Zhou, X.; Liu, Z.; Liu, X.; Guo, G. iPos-5G: Indoor Positioning via Commercial 5G NR CSI. IEEE Internet Things J. 2023, 10, 8718–8733. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, L.; Ruan, Y.L. Indoor Positioning with Multibeam CSI From a Single 5G Base Station. IEEE Sens. Lett. 2024, 8, 1. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, L.; Ruan, Y.L.; Chen, R.Z. Indoor positioning with multi-beam CSI of commercial 5G signals. Urban Inf. 2024, 3, 1. [Google Scholar] [CrossRef]
- Guo, C.; Qi, S.; Guo, W.; Deng, C.; Liu, J. Structure and performance analysis of fusion positioning system with a single 5G station and a single GNSS satellite. Geo-Spat. Inf. Sci. 2023, 26, 94–106. [Google Scholar] [CrossRef]
- He, J.; Swamy, M.N.S.; Ahmad, M.O. Efficient Application of MUSIC Algorithm Under the Coexistence of Far-Field and Near-Field Sources. IEEE Trans. Signal Process. 2012, 60, 2066–2070. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, Y.; Liu, J. Mixed-Order MUSIC Algorithm for Localization of Far-Field and Near-Field Sources. IEEE Signal Process. Lett. 2013, 20, 311–314. [Google Scholar] [CrossRef]
- Zheng, Z.; Fu, M.; Wang, W.-Q.; So, H.C. Mixed Far-Field and near-Field Source Localization Based on Subarray Cross-Cumulant. Signal Process. 2018, 150, 51–56. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, L.; Yan, J.; Chen, R.Z. Accurate DOA Estimation with Adjacent Angle Power Difference for Indoor Localization. IEEE Access 2020, 8, 44702–44713. [Google Scholar] [CrossRef]
- Shahmansoori, A.; Garcia, G.E.; Destino, G.; Seco-Granados, G.; Wymeersch, H. Position and Orientation Estimation Through Millimeter-Wave MIMO in 5G Systems. IEEE Trans. Wirel. Commun. 2018, 17, 1822–1835. [Google Scholar] [CrossRef]
- Abdallah, A.A.; Shamaei, K.; Kassas, Z.M. Assessing Real 5G Signals for Opportunistic Navigation. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Online, 22–25 September 2020; pp. 2548–2559. [Google Scholar]
- Liu, Z.L.; Chen, L.; Zhou, X.; Jiao, Z.H.; Guo, G.Y.; Chen, R.Z. Machine Learning for Time-of-Arrival Estimation with 5G Signals in Indoor Positioning. IEEE Internet Things J. 2023, 10, 9782–9795. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, R.; Wang, Z.; Zhang, Y. Simulation and Analysis of Device Positioning in 5G Ultra-Dense Network. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 1529–1533. [Google Scholar]
- Dev, C.S.G.N.; Pathak, L.; Ponnamareddy, G.; Das, D. NRPos: A Multi-RACH Framework for 5G NR Positioning. In Proceedings of the 2020 IEEE 3rd 5G World Forum (5GWF), Bangalore, India, 10–12 September 2020. [Google Scholar]
- Rahman, M.M. Investigations of 5G Localization with Positioning Reference Signals. Available online: https://trepo.tuni.fi/handle/10024/120011 (accessed on 3 June 2021).
- Ferre, R.; Seco-Granados, G.; Lohan, E. Positioning Reference Signal Design for Positioning via 5G. Available online: https://www.ursi.fi/2019/Papers/Morales.pdf (accessed on 3 June 2021).
- Liu, J.; Deng, Z.; Hu, E.; Huang, Y.; Deng, X.; Zhang, Z.; Ding, Z.; Liu, B. GNSS-5G Hybrid Positioning Based on Joint Estimation of Multiple Signals in a Highly Dependable Spatio-Temporal Network. Remote Sens. 2023, 15, 4220. [Google Scholar] [CrossRef]
- Bai, L.; Sun, C.; Dempster, A.G.; Zhao, H.; Cheong, J.W.; Feng, W. GNSS-5G Hybrid Positioning Based on Multi-Rate Measurements Fusion and Proactive Measurement Uncertainty Prediction. IEEE Trans. Instrum. Meas. 2022, 71, 8501415. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Karasalo, M.; Hu, X. An Optimization Approach to Adaptive Kalman Filtering. In Proceedings of the 48th IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009. [Google Scholar]
- Akhlaghi, S.; Zhou, N.; Huang, Z. Adaptive Adjustment of Noise Covariance in Kalman Filter for Dynamic State Estimation. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar]
- Mehra, R. Approaches to Adaptive Filtering. IEEE Trans. Autom. Control. 1972, 17, 693–698. [Google Scholar] [CrossRef]
- Bierman, G. Stochastic Models, Estimation, and Control. IEEE Trans. Autom. Control. 1983, 28, 868–869. [Google Scholar] [CrossRef]
- Sage, A.P.; Husa, W. Adaptive Filtering with Unknown Prior Statistics. In Proceedings of the Joint Automatic Control Conference, Washington, DC, USA, 22–24 June 1969; pp. 760–769. [Google Scholar]
- Yang, Y.X.; Cheng, M.K.; Shum, C.K.; Tapley, B.D. Robust estimation of systematic errors of satellite laser range. J. Geod. 1999, 73, 345–349. [Google Scholar] [CrossRef]
- Ho, K.C.; Lu, X.N.; Kovavisaruch, L. Source localization using TDOA and FDOA measurements in the presence of receiver location errors: Analysis and solution. IEEE Trans. Signal Process. 2007, 55, 684–696. [Google Scholar] [CrossRef]
- Pauluzzi, D.R.; Beaulieu, N.C. A comparison of SNR estimation techniques for the AWGN channel. IEEE Trans. Commun. 2000, 48, 1681–1691. [Google Scholar] [CrossRef]
- Abu-Shaban, Z.; Zhou, X.; Abhayapala, T.; Seco-Granados, G.; Wymeersch, H. Error bounds for uplink and downlink 3D localization in 5G millimeter wave systems. IEEE Trans. Wirel. Commun. 2018, 17, 4939–4954. [Google Scholar] [CrossRef]
- MacCartney, G.R.; Zhang, J.H.; Nie, S.; Rappaport, T.S. Path Loss Models for 5G Millimeter Wave Propagation Channels in Urban Microcells. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 3948–3953. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Success Rate | Number of Iterations |
|---|---|---|
| Acos | 3.00 | |
| Atan | 9.17 |
| Index | Acos-2D | Atan-2D | Acos-3D | Atan-3D |
|---|---|---|---|---|
| Mean Value | 1.89 | 1.95 | 2.72 | |
| Max Value | 12.05 | 12.07 | ||
| Min Value | 0.03 | 0.14 | ||
| STD | 1.33 | 2.72 |
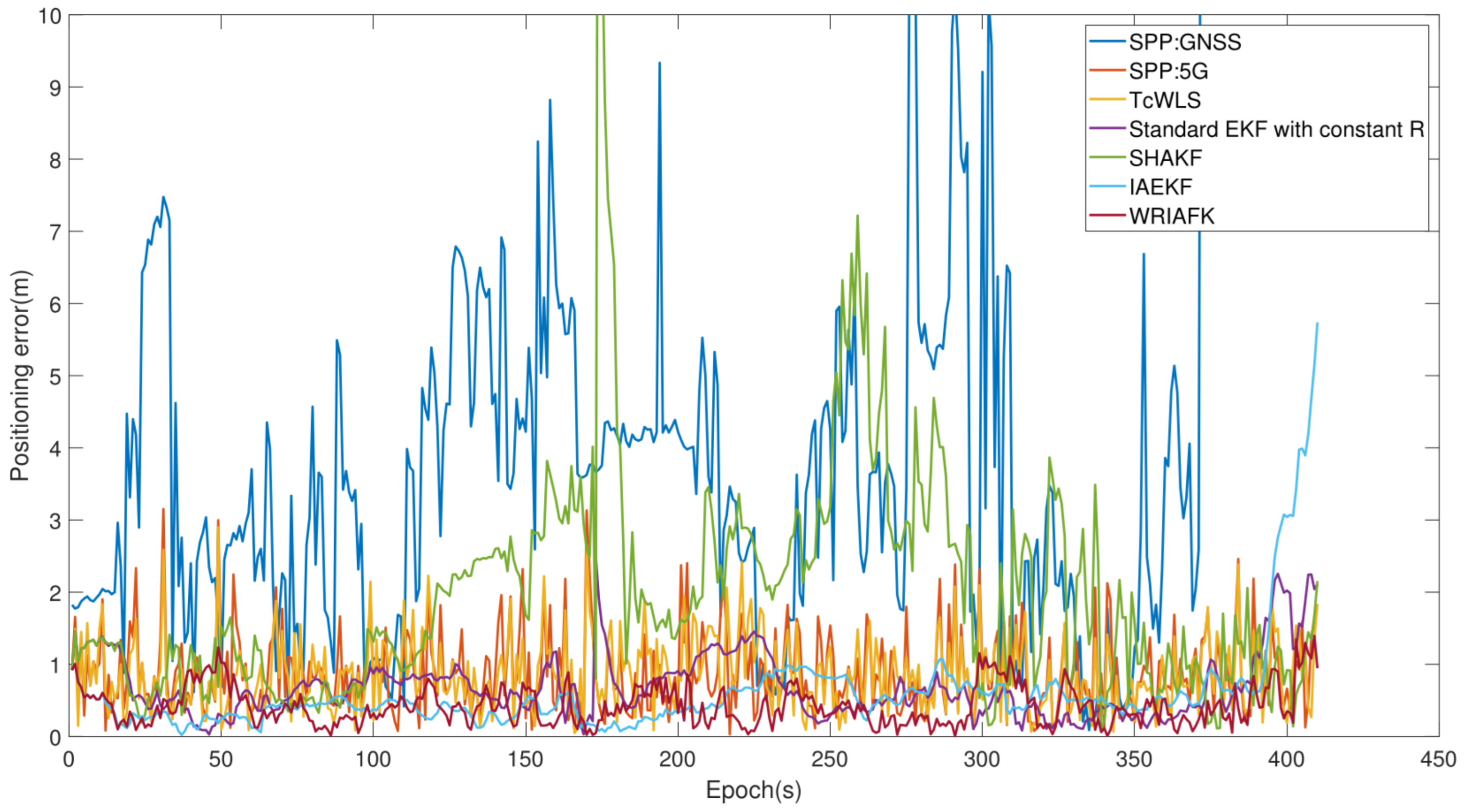
| Index | SPP:GNSS | SPP:5G | TcWLS | SEKF | SHAKF | IAEKF | WRIAKF |
|---|---|---|---|---|---|---|---|
| Mean | 3.78 | 0.89 | 0.86 | 0.68 | 1.96 | 0.60 | 0.42 |
| 4.26 | 1.07 | 1.04 | 0.79 | 2.39 | 0.58 | 0.50 | |
| 8.24 | 1.95 | 1.79 | 1.45 | 4.56 | 1.00 | 0.94 | |
| 14.23 | 2.99 | 2.58 | 2.24 | 7.45 | 3.99 | 1.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, H.; Tao, X.; Chen, L.; Zhou, X.; Ju, Z. GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter. Remote Sens. 2024, 16, 1009. https://doi.org/10.3390/rs16061009
Jiao H, Tao X, Chen L, Zhou X, Ju Z. GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter. Remote Sensing. 2024; 16(6):1009. https://doi.org/10.3390/rs16061009
Chicago/Turabian StyleJiao, Hongjian, Xiaoxuan Tao, Liang Chen, Xin Zhou, and Zhanghai Ju. 2024. "GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter" Remote Sensing 16, no. 6: 1009. https://doi.org/10.3390/rs16061009
APA StyleJiao, H., Tao, X., Chen, L., Zhou, X., & Ju, Z. (2024). GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter. Remote Sensing, 16(6), 1009. https://doi.org/10.3390/rs16061009