Abstract
This study proposes a fusion approach to enhancing urban remote sensing applications by integrating SAR (Sentinel-1) and optical (Landsat-8) satellite datasets. The fusion technique combines feature-based fusion and simple layer stacking (SLS) to improve the accuracy of urban impervious surface (UIS) extraction. SAR textures and modified indices are used for feature extraction, and classification is performed using the XGBoost machine learning algorithm in Python and Google Earth Engine. The study focuses on four global cities (New York, Paris, Tokyo, and London) with heterogeneous climatic zones and urban dynamics. The proposed method showed significant results. The accuracy assessment using random validation points shows an overall accuracy of 86% for UIS classification with the SLS method, outperforming single-data classification. The proposed approach achieves higher accuracy (86%) compared to three global products (ESA, ESRI, and Dynamic World). New York exhibits the highest overall accuracy at 88%. This fusion approach with the XGBoost classifier holds potential for new applications and insights into UIS mapping, with implications for environmental factors such as land surface temperature, the urban heat island effect, and urban pluvial flooding.
1. Introduction
Accurate and timely mapping of urban land use and land cover [1] is crucial, and relying on a single satellite dataset may have limitations [2]. Therefore, integrating multiple data sources in remote sensing can significantly enhance the accuracy and value of the extracted information [3]. Data fusion techniques have become increasingly important in this regard, as they play a vital role in improving the reliability and interpretability of remotely sensed data [4]. These techniques enable the combination of diverse data types, formats, spatial and temporal scales, and other characteristics to create a unified and comprehensive view [5]. Data fusion is widely applied in various fields, including remote sensing [6], robotics, surveillance, and medical science. One of the key advantages of data fusion in remote sensing is its ability to leverage the complementary strengths of different data sources and modalities. By integrating these sources, fusion techniques can reduce noise, fill data gaps, address uncertainties, and enhance the overall quality of the data [7]. For instance, fusing optical and radar satellite data can help overcome challenges such as cloud cover in optical data [8].
Data fusion methods in remote sensing can be categorized into three types: image-level fusion, feature-level fusion, and decision-level fusion [9]. Image-level fusion involves combining pixel values from different images to create composite images, resulting in a visually enhanced representation of the scene. Feature-level fusion focuses on extracting features from individual data sources and merging them into a unified representation before performing analysis or classification. This approach aims to capture a more comprehensive and discriminative representation of the target. Decision-level fusion maintains distinct features from different sources and performs separate categorization or decision-making processes, which are then integrated to improve overall accuracy and reliability. These fusion techniques offer flexibility in remote sensing applications, allowing researchers and practitioners to choose the most suitable approach based on the specific characteristics of the data sources and the objectives of their analysis.
Several advanced methods for optical–SAR fusion exist, such as intensity–hue–saturation (IHS) transformation, principal component analysis (PCA), wavelet transform, Gram–Schmidt spectral sharpening, and Brovey transform [10,11]. These techniques involve intricate transformations, including intensity adjustments, uncorrelated component analysis, frequency band manipulation, utilization of panchromatic data, and ratio-based processing. They offer advantages such as enhanced spatial resolution, multi-resolution analysis, and a reduction in data complexity for specific remote sensing applications. However, employing these complex fusion techniques in urban settings may pose challenges, including computational complexity and data consistency issues.
In contrast, simple layer stacking (SLS) is a straightforward fusion technique that does not require data transformation or complex mathematical manipulation. It involves stacking layers from different sensors, such as SAR and optical, to create a composite image. Research studies have investigated the effectiveness of SLS in enhancing classification results. Unlike the sophisticated methods mentioned earlier, SLS offers a practical and efficient approach for fusing data in urban remote sensing applications.
Research conducted by [12] utilized the straightforward approach of layer stacking for data fusion and discovered that incorporating all spectral and backscattering bands resulted in the highest mapping accuracy, achieving an overall accuracy (OA) of 91.07%. Another study [13] noted that combining Sentinel radar and VNIR data in an integrated layer stack performed better when coupled with the SVM classification algorithm. Similarly, ref. [14] employed layer stacking to fuse SAR and simulated Sentinel-2 imagery at the pixel level, using SVM for classification, albeit without comparison to existing products. Additionally, ref. [15] implemented simple layer stacking to merge Sentinel-1 and Sentinel-2 data.
These studies underscored the potential of data fusion, various fusion techniques, and their benefits in enhancing classification accuracy. However, there remains a need for novel approaches to fuse multi-sensor datasets at different scales. Consequently, this research focuses on applying the SLS method with extreme gradient boosting (XGBoost), presenting a framework for optical and SAR feature-based data fusion using SLS and XGBoost. A key novelty lies in integrating features extracted from the Landsat-8 and Sentinel-1 SAR datasets to enhance classification accuracy.
Our study introduces an innovative framework utilizing open-source, multi-sensor datasets to extract impervious surface information in densely populated urban areas. Additionally, we incorporate SLS with the XGBoost algorithm to improve classification accuracy significantly, particularly in urban land cover scenarios. Furthermore, while previous studies have explored the application of data fusion in urban mapping, there remains a notable gap in comparison with existing land cover products. Therefore, our research validates the obtained results against established global products like ESA and ESRI, offering valuable insights for future urban impervious surface applications.
2. Materials and Methods
2.1. Proposed Approach of SLS
The research article presents a framework (Figure 1) for optical–SAR data fusion using a simple layer stacking (SLS) approach to enhance the accuracy of extracting urban impervious surfaces (UISs). The primary objective is to integrate data from multiple sensors, specifically Sentinel-1 (SAR) and Landsat 8 (optical), in order to capture urban areas more comprehensively by leveraging the different spectral ranges and sensing modalities offered by each sensor.
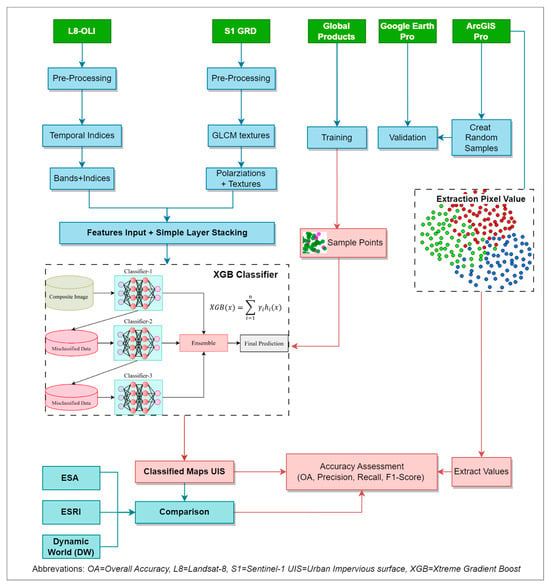
Figure 1.
Framework of proposed SLS method.
The framework utilizes modified indexes derived from Landsat 8 data to capture temporal variations in surface characteristics. These indexes, such as the visible atmospherically resistant index (VARI) and the normalized difference built-up index (NDBI), provide valuable information about changes in land cover over time. On the other hand, textural features, including local variance, dissimilarity, and entropy, are computed from the SAR data. These textural features help capture the spatial patterns and heterogeneity of urban surfaces.
The SLS approach is employed as it allows for the effective capture of spectral characteristics associated with impervious surfaces. By stacking multiple layers, the framework captures attributes such as color, texture, and reflectance. This enables the extraction of meaningful features and provides a comprehensive view of impervious surfaces at the city scale. Despite the availability of more advanced data fusion techniques, the authors chose the SLS technique due to its simplicity and efficiency for large-scale applications. Advanced fusion techniques often come with computational requirements and the need for diverse decision-making sources, which can be challenging to implement at such scales.
In the proposed framework, the optical and SAR datasets are integrated using the SLS technique by stacking the bands from both sensors into a single multi-band image. This results in a comprehensive input dataset for the subsequent classification process. For classification, an XGBoost machine learning classifier is applied, leveraging the fused dataset to improve the accuracy of UIS extraction.
The results were compared with three widely used global data products, ESA, ESRI, and Dynamic World, to evaluate the effectiveness of the approach. This comparison provides a benchmark for assessing the accuracy and reliability of the proposed framework in extracting UIS. Overall, the article offers a detailed methodology and materials section, providing in-depth explanations of the framework’s implementation, data fusion process, classification methodology, and evaluation against existing global data products.
2.2. Study Area
The presence of impervious surface cover in urban areas, including roads, buildings, and parking lots, has profound effects on environmental processes such as stormwater runoff, flooding, the urban heat island effect, and pollution [16].
The study area for this research encompasses four global alpha cities: New York City, London, Paris, and Tokyo. Each city serves as a representative case study due to its significant urbanization, diverse environmental characteristics, and socioeconomic importance. The analysis focuses on mapping impervious surfaces within these urban environments to understand their spatial distribution, extent, and impact on local environmental processes. Table 1 presents comprehensive details of these cities, including their respective climatic zones based on the Köppen–Geiger climate classification [17], along with population figures as of 2021.

Table 1.
Population and climatic zones of the Selected Cities.
New York City, as one of the largest and most densely populated cities globally, has been the subject of numerous studies focusing on impervious surface mapping. These studies employ remote sensing and GIS techniques to assess the extent and distribution of impervious surfaces within the city. The results of these studies have been instrumental in informing urban planning and environmental management strategies [18].
London, the capital city of the United Kingdom, is a city of great historical, cultural, and economic significance. Impervious surface mapping research in London has aimed to understand urban growth, land use changes, and their implications for environmental sustainability. By analyzing the patterns and trends of impervious surfaces, researchers have gained insights into the city’s development and the associated environmental impacts [19].
Paris, renowned for its iconic landmarks, rich history, and vibrant culture, has also been a focus of impervious surface mapping studies. These studies have sought to understand urban expansion, preserve green spaces, and mitigate the urban heat island effect. By mapping and analyzing impervious surfaces in Paris, researchers have contributed to urban planning efforts and the development of sustainable urban environments [20].
Tokyo, the capital city of Japan, is characterized by its modern infrastructure, technological advancements, and high population density. Research on impervious surface dynamics in Tokyo has aimed to analyze urbanization patterns, land use changes, and their impacts on local ecosystems. By monitoring and assessing the extent of impervious surfaces, researchers have gained insights into the city’s spatial development and the associated environmental consequences [21].
This research examines the impact of impervious surfaces on urban environments in four different cities located in various regions. The objective is to gain a deeper understanding of the implications of these surfaces and their effects on sustainable urban development and environmental management. The study utilizes the SLS data fusion method in combination with XGBoost, a machine learning algorithm, to conduct a more precise analysis. By employing these techniques, the research aims to provide valuable insights into how impervious surfaces influence urban areas. The study area map (Figure 2) displays the specific locations of the selected cities.
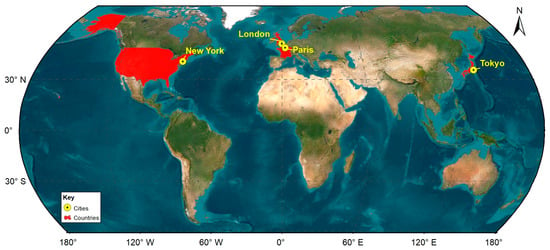
Figure 2.
Selected global cities from four different geographical locations.
2.3. Datasets
This research article utilized a combination of SAR (synthetic aperture radar) and optical satellite data, specifically VV (vertical vertical) and VH (vertical horizontal) polarizations from Sentinel-1, along with Landsat-8 OLI (operational land imager) data. These datasets were integrated to effectively delineate urban impervious surfaces, overcoming challenges associated with land use classes, building shadows, and cloud cover. As a result, the accuracy of UIS (urban impervious surface) mapping was significantly improved [16,22]. Additionally, the incorporation of indexes and textures enhanced the ability to identify urbanization patterns and accurately map impervious surface areas. Detailed information regarding the datasets and their respective bands utilized in this study, along with their corresponding links in Google Earth Engine (GEE), can be found in Table 2 below.
Table 2.
Detailed information on datasets.
2.4. Methodology
This research employed Landsat 8 multispectral imagery and Sentinel-1 synthetic aperture radar (SAR) data as the primary datasets. Landsat 8 provided six bands, including blue, green, red, near-infrared, shortwave infrared 1, and shortwave infrared 2. These bands were utilized to generate normalized indexes, which were further modified to calculate annual statistical compositions such as minimum, median, maximum, and standard deviation. The Sentinel-1 SAR dataset contributed VV and VH polarizations. Additionally, the grey level co-occurrence matrix (GLCM) technique was applied to generate textures from the VV and VH polarizations in Google Earth Engine (GEE). These textures were integrated as additional information for analysis and fused with the modified indexes.
The sampling datasets underwent refinement using Dynamic World (DW), European Space Agency (ESA), ESRI datasets, and the Google Earth Engine (GEE) cloud platform. Only sampling points from 50+ urban and non-urban areas, along with their surroundings, were selected. The selection of these sampling points was based on a consensus regarding land use/land cover (LULC) classes.
The selected sampling points encompassed spectral bands, composite spectral–temporal indexes, SAR polarizations, and textures, which were combined into an integrated dataset for the classification process. This was divided into training and testing sets using an 80–20 percentile split to prepare the dataset for model training and evaluation. Prior to training the model, the forward stepwise selection (FSS) method was employed in conjunction with the 5-fold cross-validation technique. This approach helped determine the optimal combination of features that yielded the highest accuracy. The training set, which comprised 80% of the data, was then utilized to train the model. Subsequently, the testing set, constituting 20% of the data, was used to assess the accuracy of the model’s predictions.
Following the classification process, an accuracy assessment was conducted to evaluate the performance of the approach. This assessment involved comparing the classifications generated by the models with ground truth data or reference datasets to determine the level of agreement between the predicted and actual LULC classes. The accuracy assessment provided insights into the effectiveness of the models in accurately identifying and categorizing different land use and land cover types.
Overall, the integration of Landsat 8 and Sentinel-1 data, along with the incorporation of normalized indexes, textures, and SAR polarizations, allowed for a comprehensive analysis of urban and non-urban areas. The partitioning of the datasets and the subsequent accuracy assessment ensured the reliability and robustness of the classification results.
2.4.1. XGB Classifier
According to [23], in a study on landslide susceptibility mapping, XGBoost (Xtreme gradient boosting) outperformed all other classifiers. Additionally, in a review of ensemble learning algorithms by [24], XGBoost was found to be the most accurate predictor. XGBoost is a highly efficient machine learning algorithm specifically designed for complex classification tasks and high-dimensional urban mapping.
One of the strengths of XGBoost is its ability to handle noise and outliers commonly encountered in classification processes, thus ensuring reliable performance. It also facilitates the identification of significant variables and provides insights into the underlying processes driving urban patterns through its feature importance ranking. XGBoost effectively addresses imbalanced data issues by employing weighted loss functions and subsampling techniques.
The scalability and speed of XGBoost make it well suited for urban applications, where large datasets and real-time processing are often involved. Furthermore, when used in ensemble learning, XGBoost enhances prediction accuracy and mitigates overfitting, leading to more robust and reliable results. In this study, Equations (1)–(5) were employed for the XGBoost classifier. Additionally, the study followed the approach outlined by [25] to implement the XGBoost classifier. We omitted the equation details as they are all referenced in the citations mentioned above.
The representation of the tree structure by the variable F, which represents the space of the tree. In the XGBoost algorithm, the structure of an individual tree is represented by the variable q, while T denotes the number of leaves in that tree. The function fa corresponds to the leaf weights w and the individual tree structure q. The objective function in XGBoost is designed to optimize the ensemble tree and minimize errors.
2.4.2. Index Modification
This study uses a wide range of normalized difference indexes that used two band combinations from six primary bands of Landsat and their four annual statistical composites. The six spectral and temporal features that have high correlations with LULC classification were selected from 60 practiced indexes. In this section, the study introduced modifications to the six indexes used, namely the VARI (visible atmospherically resistant index), GRVI (green red vegetation index), NDBI (normalized difference built-up index), NDTI (normalized difference tillage index), SDUI (soil drought index), and MNDWI (modified normalized difference water index). The corresponding modified Equations (6)–(11) were employed to calculate these modified indexes.
The novelty of these indexes lies in their approach of utilizing annual statistical composites derived from pre-existing indexes. These modified indexes incorporate not only spectral information but also temporal features. By considering the temporal dimension of the data, these indexes capture changes and patterns over time, allowing for a more comprehensive analysis of land use and land cover dynamics. This integration of spectral and temporal-composite imagery enhances the accuracy and depth of the analysis in the research.
MedianVARI
The visible atmospherically resistant index (VARI) is a normalized difference index with green and red bands of Landsat [26]. MedianVARI is an annual median composite of the VARI index. The equation is given below.
This index is specifically intended to highlight the vegetation cover in the visible spectrum while alleviating the atmosphere impacts and illumination differences. It is most suitable for color images as it incorporates all three RGB bands. The purpose of adding this index to this research is to enhance the output, as better vegetation cover will help extract urban impervious surfaces more accurately.
MedianGRVI
The green red vegetation index (GRVI) is a normalized difference index with green and NIR bands. This study takes its annual median composite and generates the MedianGRVI index that is given below.
In research by [27], the GRVI index was used as a phenological indicator on the basis of multiyear observations of phenology and spectral reflection for the ecosystem in Japan. The findings represent the relationship between seasonal vegetation changes and GRVI, having high temporal resolution. The results further showed the advantages of GRVI as an indicator of phenology, like GRVI having a “0” value could be a site-independent single threshold to detect the early green-up phase of leaves and the middle stage of autumn coloring. Secondly, it can also be helpful to discriminate the response of subtle disturbances and types of ecosystems.
MinNDBI
The normalized difference built-up index uses the SWIR1 and NIR bands and is an index for mapping built-up areas. This study takes their minimum annual composition to generate MinNDBI.
This research was based on mapping building density using different built-up indexes, including NDLII, to extract imperviousness, NDBI, and BCI. The results from all three indexes were compared using regression analysis, which shows the high correlation coefficient of using NDBI compared to other indexes. The RMSE value was also minimal. Thus, it proved that when mapping high-density built-up areas, NDBI was the most suitable one [28]. The reason for adding this index in the current study was to enhance the results, as extracting impervious surfaces is particularly related to built-up.
MaxNDTI
The normalized difference tillage index (NDTI) uses the SWIR1 and SWIR2 bands to map crop residue. This study uses its annual maximum composition to generate the MaxNDTI index.
An issue often occurs when mapping urban impervious surfaces; this being maintaining heterogeneity in the classes. A study showed that using NDTI, NDVIre, and MNDWI enhances classification accuracy by effectively discriminating between urban and barren land [29]. The combination of these three indexes outstandingly improves the performance with an accuracy of 93% and a kappa value of 0.91 for all land cover classes. Therefore, the incorporation of these modified indexes is expected to enhance the accuracy of the analysis in the current study. This combination showed an outstanding overall performance with a 93% accuracy and a 0.91 kappa value for all LCLU classes.
SDUI
The normalized difference of the urban index (UI), first published in 1997, uses the SWIR2 and NIR bands.
This study takes its standard deviation to generate the SDUI index.
It supports cloud-free Landsat NDVI composite with NTL in order to accurately characterize the overall urban area at the spatial resolution of 30 m. NDUI is combined with cloud shadow-free Landsat Normalized Difference Vegetation Index (NDVI) composite and DMSP/OLS night time light (NTL) to characterize global urban areas at a 30 m. It is useful for distinguishing between barren and desert areas [30]. Cloud cover is always a challenge when working on satellite imagery, and mitigating it will surely help improve results. The reason for using a standard deviation of the UI is to analyze the dispersion between datasets.
2.4.3. Textural Features
This study utilized Sentinel-1 synthetic aperture radar (SAR) data and the grey level co-occurrence matrix (GLCM) texturing function available in Google Earth Engine (GEE). Specifically, the focus was on extracting two texture measures: entropy and dissimilarity. Entropy quantifies the randomness of the grey-level distribution, while dissimilarity captures the differences between the VV and VH polarizations at the pixel level using a one-pixel neighborhood. These texture measures were employed to characterize and quantify the spatial structure and variability present in the SAR data of the studied cities.
In total, six SAR features were utilized in the analysis: ‘VV’, ‘VH’, ‘VV_diss_30 m’, ‘VV_ent_30 m’, ‘VH_diss_30 m’, and ‘VH_ent_30 m’. The ‘VV’ and ‘VH’ represent the original SAR polarizations, while ‘VV_diss_30 m’, ‘VV_ent_30 m’, ‘VH_diss_30 m’, and ‘VH_ent_30 m’ correspond to the dissimilarity and entropy values computed at a 30 m resolution.
Accuracy assessment metrics were implemented to evaluate the performance of the research methodology. These metrics included overall accuracy, F1 score, precision, and recall. The classification accuracy was assessed for the results obtained from the optical–SAR (O-S) fused data, considering both single datasets and three global data products.
Overall accuracy measures the proportion of correctly classified pixels compared to the total number of pixels. The F1 score combines precision and recall to provide a balanced measure of classification performance. Precision represents the proportion of correctly classified impervious surface pixels out of all pixels classified as impervious surfaces, while recall represents the proportion of correctly classified impervious surface pixels out of all actual impervious surface pixels.
By evaluating these metrics, the research methodology’s accuracy and effectiveness in classifying impervious surfaces using the O-S fused data can be assessed. Additionally, by comparing the results to three global data products, a benchmark for performance evaluation is established.
2.5. Accuracy Assessment Method
The next step in the research involved assessing the accuracy of the developed framework. A ground truth task was conducted, which entailed generating 525 points for each city using the “create random point” tool in ArcMap to accomplish the accuracy assessment. This resulted in a total of 2100 points across all four cities. A third-party team then performed a ground validation task using Google Earth Pro to validate these points.
The “Extract Values to Points” tool in ArcGIS Spatial Analyst was utilized to obtain the classified raster values at each reference point location. The resulting reference point locations and their corresponding extracted raster values were exported to a comma-separated values (CSV) file. Subsequently, a Python code within a Jupiter Notebook was employed to process the extracted CSV file, enabling statistical analysis and accuracy assessment tasks.
A random sample of points was implemented and compared with the ground truth points to ensure the performance of the method. This comparison allowed for a comprehensive evaluation of the framework’s accuracy and reliability. According to [31], the formulas for calculating overall accuracy, precision, F1 score, and recall can be obtained from Equations (11)–(14). These equations offer a mathematical framework to assess the performance of classification models and evaluate key metrics that measure the accuracy, precision, and effectiveness of the methodology employed.
In classification evaluation, the terms true positives (TP), false positives (FP), true negatives (TN), and false negatives (FN) are used to assess the performance of a classification model. True positives represent the number of samples correctly predicted as “positive” by the model. False positives indicate the number of samples wrongly predicted as “positive” when they are actually “negative” in reality. True negatives refer to the number of samples correctly predicted as “negative”, while false negatives represent the number of samples wrongly predicted as “negative” when they are actually “positive”. These terms play a crucial role in calculating metrics such as accuracy, precision, recall, and F1 score, which provide insights into the effectiveness and reliability of a classification model.
3. Results
This section presents the research findings on the extraction of urban impervious surfaces with high accuracy using the SLS fusion approach, as described in the methodology section. The results are further elaborated below, providing separate explanations for the UIS extraction process and other relevant parameters.
3.1. Accuracy Metrics
The research findings focused on evaluating the accuracy of individual satellite data and global products using an assessment framework called SLS (simple layer stacking). The results revealed that the SLS framework outperformed other data products in terms of classification performance. Specifically, the SLS approach achieved the highest overall accuracy value of 0.86, indicating a high level of correctness in classifying land cover. The F1 score, which considers both precision and recall, also demonstrated a favorable value of 0.85, indicating a good balance between accurate positive predictions and minimizing false positives and false negatives. The precision and recall values were both 0.87, further affirming the robust performance of the SLS approach.
In contrast, the Sentinel-1 dataset alone exhibited the lowest performance among the evaluated datasets. It achieved an accuracy value of 0.67, indicating a lower level of correctness compared to the other datasets. The F1 score, precision, and recall values for the Sentinel-1 dataset were also relatively lower, measuring at 0.61, 0.68, and 0.67, respectively. These findings highlight the superior performance of the SLS framework in accurately classifying land cover compared to individual satellite data.
Table 3 provides a comparative accuracy assessment of the SLS framework with other data products such as Landsat-8, Sentinel-1, ESA, ESRI, and DW. The assessment was conducted for the year 2021, using a consistent set of validation sample points across all data products to ensure a fair and reliable comparison. The results clearly indicate that the SLS framework demonstrates superior accuracy when compared to other renowned products, including ESA, DW, and ESRI. This signifies that the SLS approach surpasses these well-known alternatives in terms of accuracy and reliability for classifying urban impervious surfaces (UIS).
Table 3.
Average accuracy assessment values of all datasets and products.
The findings from this comparative analysis highlight the effectiveness of the SLS framework in accurately classifying UISs, outperforming established data products commonly used in the field, such as ESA, DW, and ESRI. These results further establish the SLS framework as a reliable and accurate approach for UIS classification, making it a valuable tool for urban planning, environmental monitoring, and related applications.
3.2. Confusion Matrix (SLS)
Table 4 in the research article presents the confusion matrix for the SLS (Sentinel-1 land surface) framework, providing both the predicted and true values. This matrix offers a comprehensive overview of accurate and inaccurate predictions for each class, allowing for a detailed analysis of the model’s performance. The confusion matrix is particularly valuable in identifying classes that are prone to confusion and misclassification, thereby shedding light on potential errors and misclassifications [32].
Table 4.
Confusion Matrix for SLS.
The presented confusion matrix represents the combined performance of all four cities for the selected year of 2021. It summarizes the classification results for four different classes: water bodies, vegetation, barren land, and urban. For the water bodies class, there were 225 true positives, indicating accurate identification. However, there were two instances of it being misclassified as vegetation and three instances of it being misclassified as urban. The vegetation class exhibited 843 true positives, showing successful classification. However, there were five false negatives mistakenly identifying it as water bodies and five instances where it was misclassified as urban. In the barren land class, there were 180 true positives, indicating correct classification. However, there was one false negative where it was misclassified as vegetation and three instances of it being misclassified as urban. The urban class recorded 1439 true positives, demonstrating accurate identification. However, there were five instances of it being misclassified as water bodies and two instances of it being misclassified as barren land.
These results provide insights into the model’s performance in accurately classifying different land cover types within the studied cities. The detailed information presented in the confusion matrix allows researchers to identify specific areas where the model may struggle or exhibit misclassifications, guiding further improvements and refinements to the classification methodology.
3.3. Correlation Matrix
The research article implemented correlation matrices to investigate the relationships between variables. A correlation matrix is a square matrix that displays correlation coefficients, which measure the strength and direction of the relationships between pairs of variables. By analyzing the values in the correlation matrix, researchers can assess the degree of correlation between different variables and determine whether the relationship is positive or negative [33].
In this study, correlation matrices were generated based on the models used in the analysis, utilizing the same datasets. Additionally, a separate correlation matrix was created to examine the correlations and importance of different bands, as depicted in Figure 3. This specific correlation matrix highlighted the highest correlations, indicating strong associations between SLS and Landsat-8, DW, and ESRI, while revealing a weaker correlation with ESA. The correlation matrix played a crucial role in identifying and quantifying the relationships between variables, providing valuable insights into the interdependencies and relative importance of different bands in the analysis.

Figure 3.
Correlation Matrix for SLS Framework.
Overall, the correlation matrices served as powerful tools for understanding the relationships and dependencies within the dataset, enabling researchers to gain a deeper understanding of the variables’ interplay and the significance of different bands in the analysis.
3.4. Extraction of Urban Impervious Surface (UIS)
The research study was conducted in four highly populated cities worldwide, each characterized by varying extents and heterogeneity. The classified results for these cities, representing four land cover classes (urban impervious surfaces, water bodies, vegetation, and barren land), are presented in Figure 4. It is important to note that while the primary objective of the method was to extract urban impervious surface (UIS) data, the training process incorporated all four major classes to ensure comprehensive training and classification accuracy.
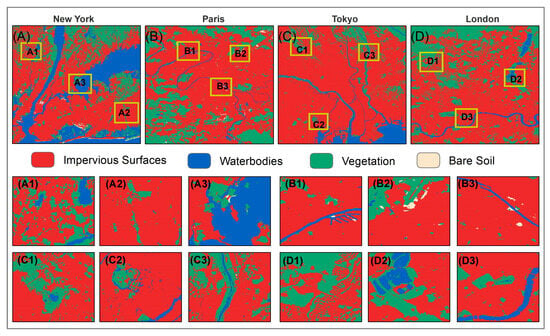
Figure 4.
Classified map of all four alpha cities with five classes. (A1, A2 and A3 are magnified regions from New York, B1, B2 and B3 from Paris, similarly C1, C2, and C3 from Tokyo and D1, D2, and D3 from London all these regions are showing classification efficiency for all four classes and similar regions are compared in Figure 5 for global data products).
A land use/land cover classification was performed using three different datasets: Sentinel-1 SAR data alone, Landsat 8 optical data alone, and a stacked combination of Sentinel-1 and Landsat 8 datasets. The results revealed that Sentinel-1 tended to overestimate the area of impervious surface across all cities. On the other hand, Landsat 8 performed better than Sentinel-1 alone, achieving an overall accuracy of 84%. However, it was observed that Landsat 8 also overestimated the UISs for the city of London.
When the Sentinel-1 and Landsat-8 data were combined through a stacked approach, utilizing both indexes and textural features, the classification results improved significantly for all cities. The stacked dataset achieved the highest overall accuracy of 86% compared to using the individual datasets alone. This suggests that integrating radar and optical remote sensing data through a stacked classification approach can yield more accurate land use/land cover mapping compared to relying on either sensor individually.
These findings highlight the importance of incorporating multiple data sources and employing a fusion approach for enhanced classification accuracy in land use/land cover mapping. The results provide valuable insights for future studies in the field of remote sensing and urban land cover analysis.
3.5. Results Comparison with Three Renowned Global Data Products
The classification results were cross-checked and validated against three widely recognized state-of-the-art (SOTA) datasets. These benchmark datasets included the European Space Agency (ESA), ESRI, and Dynamic World (DW) global land use/land cover (LULC) products. The comparison of the study outcomes with these reputable reference sources served as an independent evaluation of the classification accuracy, providing an additional layer of validation.
The selected benchmark datasets are considered authoritative due to their robust production methods and stringent quality control procedures. For instance, ESA World Cover [34] is an intergovernmental organization renowned for its expertise in space research and satellite-based observations. Similarly, ESRI Land Cover [35] is a prominent organization specializing in geographic information system (GIS) software and products, offering reliable LULC data. Dynamic World, a real-time dataset, was collaboratively developed by Google and the World Resources Institute, as described in [36]. This dataset provides up-to-date and accurate information on global land cover dynamics.
By cross-validating the study results with these reputable benchmark datasets, the classification accuracy was independently assessed, providing confidence in the reliability of the findings. The incorporation of these well-established reference sources enhances the robustness and credibility of the research outcomes, reinforcing the significance of the proposed methodology in land use/land cover analysis.
Figure 5 presents a comparison between the results obtained from the current approach and the three benchmark datasets, while Table 5 provides corresponding accuracy metrics. The map showcases four global alpha cities located in diverse geographical regions, highlighting the substantial impact of urbanization on urban impervious surfaces. To accentuate the disparities between the findings of the three datasets and the present research, specific regions within the four cities were marked with yellow square shapes. These highlighted areas draw attention to the observed variations and discrepancies.
Table 5.
Accuracy metrics for all four cities in comparison with three global products.
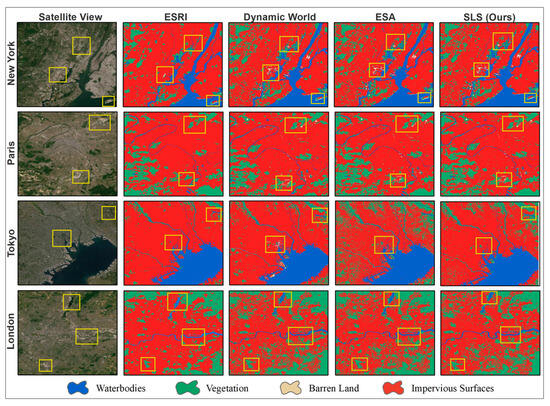
Figure 5.
Comparison with ESRI, DW, and ESA for selected cities.
For London, all three datasets mixed barren and vegetation in a highlighted circle, but our research results delineated better barren land and vegetation comparatively. Moreover, New York showed the highest accuracy for all four cities and for the SLS-fused method at 88% (Table 4). The outcomes of ESRI and DW show an overestimation of waterbodies for Tokyo, but comparatively, ESA classified water areas as vegetation. However, our method showed optimum results for the same city for all classes with an overall accuracy of 84%. For Paris, DW, ESA, and ESRI mixed vegetation up with impervious surfaces, both classes were highlighted, but again, our results remained better. However, ESRI showed good results but somewhat mixed vegetation up with impervious surfaces. However, our approach demonstrated ideal results in accurately delineating impervious surfaces for this city. Overall, our research outcomes exhibit improved results compared to the other datasets, particularly in terms of distinguishing between classes and achieving higher accuracy in multiple cities.
4. Discussion
The main objective of this research is to enhance the accuracy of urban impervious surface (UIS) extraction. The research findings highlighted the primary factors influencing UIS extraction, which are mainly population increase and urbanization. Considering these interconnected factors allows for a more comprehensive understanding of UIS dynamics and their relationship with urban environments.
The results demonstrated the effectiveness of fusing optical and SAR remote sensing data for improved urban impervious surface extraction compared to using the individual datasets alone. Texture and index features derived from Landsat-8 and Sentinel-1 helped capture complementary spectral and spatial characteristics, enhancing classification performance. The XGBoost classifier effectively modeled the complex relationships between land use classes based on the fused inputs. Accuracy assessment against well-established global products and validation points validated the superior performance of the proposed SLS methodology.
XGBoost has been widely acknowledged for its effectiveness in other remote sensing studies. However, there is a notable gap in the literature when it comes to utilizing XGBoost for impervious surface monitoring. There are only a few studies that have used XGBoost with a Sentinel-2 [37] data alone. To date, no studies have specifically explored the application of XGBoost using multi-sensor dataset for UIS mapping.
Existing studies in the field have demonstrated the superiority of XGBoost in various related areas. For instance, a study conducted by [38] showcased the exceptional performance of XGBoost in accurately predicting peak runoff compared to traditional classification algorithms. This research emphasized the significant advantages offered by XGBoost in enhancing hydrological knowledge, particularly in the context of urban research with complex spatial patterns, as highlighted in the study conducted by [39].
Implementing the current approach with integrated multi-sensor open-source datasets presents uncertainties and limitations, particularly for time series analysis due to the scarcity of historical images. Obtaining all datasets for the same historical year is rarely feasible. Most data providers now offer pre-processed imagery, which is beneficial for analysis. Although the cloud removal algorithms were used as a pre-processing task, the presence of any cloud can still affect classification accuracy. In some cases, machine learning algorithms may misclassify clouds as other classes or even consider clouds as a separate class. It is important to note that applying this approach to high-resolution datasets could potentially improve overall classification accuracy.
5. Conclusions
In conclusion, this research proposed an optical–SAR data fusion approach that leverages simple layer stacking and machine learning classification to enhance the extraction of urban impervious surfaces. By integrating texture, index, and temporal features from both optical and radar datasets, a comprehensive characterization of land use patterns was achieved. The findings clearly demonstrate that the fusion of multi-sensor SAR and optical data outperforms the use of SAR or optical data alone for urban land cover classification.
The proposed methodology exhibited a high overall accuracy compared to three renowned global products, indicating its effectiveness in detailed urban mapping applications. The integration of multiple sensors and the application of XGBoost showcased the potential for improved accuracy and reliability in mapping impervious surfaces across diverse cities. This methodology carries significant implications for sustainable urban planning and environmental management, enabling a better understanding of impervious surface dynamics under changing climatic conditions.
Moreover, the research findings demonstrated the robustness of the approach, achieving an overall accuracy of 86%, an F1 score of 85%, and precision of 87%. The inclusion of cities from different climate zones in this study aims to provide valuable insights for future researchers conducting similar studies in their respective cities and climate zones using this approach.
Future work recommendations include exploring the scalability of the proposed methodology to larger geographic areas and assessing its applicability to different urban contexts worldwide. Additionally, investigating the potential integration of additional data sources, such as LiDAR or hyperspectral imagery, could further improve the accuracy and resolution of urban impervious surface mapping. By doing so, researchers can further advance our understanding of impervious surface dynamics and contribute to the development of sustainable urban environments.
Author Contributions
Conceptualization, M.N.A.; methodology, A.J. and M.N.A.; validation, F.I., I.A. and M.N.A.; formal analysis, M.N.A.; data curation, A.J. and M.N.A.; writing—original draft preparation, M.N.A.; writing—review and editing, Z.S. and G.D.B.; visualization, M.N.A.; supervision, Z.S.; funding acquisition, H.D.S. and G.D.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by Department of Geology, University of Patras, Rio—Patras, Greece.
Data Availability Statement
Data will be made available on request. The data are not publicly available due to Data Sharing Policies.
Conflicts of Interest
The authors have no potential conflicts of interest.
References
- Ahmad, M.N.; Shao, Z.; Javed, A. Modelling land use/land cover (LULC) change dynamics, future prospects, and its environmental impacts based on geospatial data models and remote sensing data. Environ. Sci. Pollut. Res. 2023, 30, 32985–33001. [Google Scholar] [CrossRef]
- Ban, Y.; Jacob, A. Fusion of Multitemporal Spaceborne SAR and Optical Data for Urban Mapping and Urbanization Monitoring. In Multitemporal Remote Sensing Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2016; pp. 107–123. [Google Scholar]
- Adrian, J.; Sagan, V.; Maimaitijiang, M. Sentinel SAR-optical fusion for crop type mapping using deep learning and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2021, 175, 215–235. [Google Scholar] [CrossRef]
- Li, J.; Hong, D.; Gao, L.; Yao, J.; Zheng, K.; Zhang, B.; Chanussot, J. Deep learning in multimodal remote sensing data fusion: A comprehensive review. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102926. [Google Scholar] [CrossRef]
- Zhang, Z.; Zeng, Y.; Huang, Z.; Liu, J.; Yang, L. Multi-source data fusion and hydrodynamics for urban waterlogging risk identification. Int. J. Environ. Res. Public Health 2023, 20, 2528. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.; Gong, P. ROBOT: A spatiotemporal fusion model toward seamless data cube for global remote sensing applications. Remote Sens. Environ. 2023, 294, 113616. [Google Scholar] [CrossRef]
- Moreno-Martínez, Á.; Izquierdo-Verdiguier, E.; Maneta, M.P.; Camps-Valls, G.; Robinson, N.; Muñoz-Marí, J.; Sedano, F.; Clinton, N.; Running, S.W. Multispectral high resolution sensor fusion for smoothing and gap-filling in the cloud. Remote Sens. Environ. 2020, 247, 111901. [Google Scholar] [CrossRef]
- Meraner, A.; Ebel, P.; Zhu, X.X.; Schmitt, M. Cloud removal in Sentinel-2 imagery using a deep residual neural network and SAR-optical data fusion. ISPRS J. Photogramm. Remote Sens. 2020, 166, 333–346. [Google Scholar] [CrossRef] [PubMed]
- Ounoughi, C.; Yahia, S.B. Data fusion for ITS: A systematic literature review. Inf. Fusion. 2023, 89, 267–291. [Google Scholar] [CrossRef]
- Karathanassi, V.; Kolokousis, P.; Ioannidou, S. A comparison study on fusion methods using evaluation indicators. Int. J. Remote Sens. 2007, 28, 2309–2341. [Google Scholar] [CrossRef]
- Xu, L.; Xie, G.; Zhou, S. Panchromatic and Multispectral Image Fusion Combining GIHS, NSST, and PCA. Appl. Sci. 2023, 13, 1412. [Google Scholar] [CrossRef]
- Tavares, P.A.; Beltrão, N.E.S.; Guimarães, U.S.; Teodoro, A.C. Integration of sentinel-1 and sentinel-2 for classification and LULC mapping in the urban area of Belém, eastern Brazilian Amazon. Sensors 2019, 19, 1140. [Google Scholar] [CrossRef]
- Clerici, N.; Calderón, C.A.V.; Posada, J.M. Fusion of Sentinel-1A and Sentinel-2A data for land cover mapping: A case study in the lower Magdalena region, Colombia. J. Maps 2017, 13, 718–726. [Google Scholar] [CrossRef]
- Haas, J.; Ban, Y. Sentinel-1A SAR and sentinel-2A MSI data fusion for urban ecosystem service mapping. Remote Sens. Appl. Soc. Environ. 2017, 8, 41–53. [Google Scholar] [CrossRef]
- Bui, D.H.; Mucsi, L. Comparison of layer-stacking and Dempster-Shafer theory-based methods using Sentinel-1 and Sentinel-2 data fusion in urban land cover mapping. Geo-Spat. Inf. Sci. 2022, 25, 425–438. [Google Scholar] [CrossRef]
- Shao, Z.; Ahmad, M.N.; Javed, A.; Islam, F.; Jahangir, Z.; Ahmad, I. Expansion of Urban Impervious Surfaces in Lahore (1993–2022) Based on GEE and Remote Sensing Data. Photogramm. Eng. Remote Sens. 2023, 89, 479–486. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Yang, Z.; Witharana, C.; Hurd, J.; Wang, K.; Hao, R.; Tong, S. Using Landsat 8 data to compare percent impervious surface area normalized difference vegetation index as indicators of urban heat island effects in Connecticut, U.S.A. Environ. Earth Sci. 2020, 79, 424. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Ge, X.; Mauree, D.; Castello, R.; Scartezzini, J.L. Spatio-temporal relationship between land cover and land surface temperature in urban areas: A case study in Geneva and Paris. ISPRS Int. J. Geo-Inf. 2020, 9, 593. [Google Scholar] [CrossRef]
- Ahmad, M.N.; Shao, Z.; Javed, A. Mapping impervious surface area increase and urban pluvial flooding using Sentinel Application Platform (SNAP) and remote sensing data. Environ. Sci. Pollut. Res. 2023, 30, 125741–125758. [Google Scholar] [CrossRef]
- Shao, Z.; Ahmad, M.N.; Javed, A. Comparison of Random Forest and XGBoost Classifiers Using Integrated Optical and SAR Features for Mapping Urban Impervious Surface. Remote Sens. 2024, 16, 665. [Google Scholar] [CrossRef]
- Sahin, E.K. Assessing the predictive capability of ensemble tree methods for landslide susceptibility mapping using XGBoost, gradient boosting machine, and random forest. SN Appl. Sci. 2020, 2, 1308. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Shen, W. A review of ensemble learning algorithms used in remote sensing applications. Appl. Sci. 2022, 12, 8654. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Teke, A. Predictive Performances of ensemble machine learning algorithms in landslide susceptibility mapping using random forest, extreme gradient boosting (XGBoost) and natural gradient boosting (NGBoost). Arab. J. Sci. Eng. 2022, 47, 7367–7385. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote Sens. 2002, 23, 2537–2562. [Google Scholar] [CrossRef]
- Morales-Gallegos, L.M.; Martínez-Trinidad, T.; Hernández-de la Rosa, P.; Gómez-Guerrero, A.; Alvarado-Rosales, D.; de Lourdes Saavedra-Romero, L. Tree Health Condition in Urban Green Areas Through Crown In-Dicators and Vegetation Indices. Forests 2023, 14, 1673. [Google Scholar] [CrossRef]
- Fariz, T.R.; Faniza, V. Comparison of Built-Up Land Indices for Building Density Mapping in Urban Environments. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2023. [Google Scholar]
- Osgouei, P.E.; Kaya, S.; Sertel, E.; Alganci, U. Separating built-up areas from bare land in mediterranean cities using Sentinel-2A imagery. Remote Sens. 2019, 11, 345. [Google Scholar] [CrossRef]
- Kawamura, M.; Jayamanna, S.; Tsujiko, Y. Quantitative evaluation of urbanization in developing countries using satellite data. Doboku Gakkai Ronbunshu 1997, 1997, 45–54. [Google Scholar] [CrossRef] [PubMed]
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef] [PubMed]
- Görtler, J.; Hohman, F.; Moritz, D.; Wongsuphasawat, K.; Ren, D.; Nair, R.; Kirchner, M.; Patel, K. Neo: Generalizing Confusion Matrix Visualization to Hierarchical and Multi-Output Labels. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022. [Google Scholar] [CrossRef]
- Sarmah, B.; Nair, N.; Mehta, D.; Pasquali, S. Learning Embedded Representation of the Stock Correlation Matrix Using Graph Machine Learning. arXiv 2022, arXiv:2207.07183. [Google Scholar]
- Zanaga, D.; Van De Kerchove, R.; Daems, D.; De Keersmaecker, W.; Brockmann, C.; Kirches, G.; Wevers, J.; Cartus, O.; Santoro, M.; Fritz, S.; et al. ESA WorldCover 10 m 2021 v200, Version v200; Zenodo: Geneva, Switzerland, 2022. [Google Scholar]
- Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. [Google Scholar] [CrossRef]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- Misra, M.; Kumar, D.; Shekhar, S. Assessing machine learning based supervised classifiers for built-up impervious surface area extraction from sentinel-2 images. Urban For. Urban Green. 2020, 53, 126714. [Google Scholar] [CrossRef]
- Zhou, S.; Liu, Z.; Wang, M.; Gan, W.; Zhao, Z.; Wu, Z. Impacts of building configurations on urban stormwater management at a block scale using XGBoost. Sustain. Cities Soc. 2022, 87, 104235. [Google Scholar] [CrossRef]
- Wang, M.; Li, Y.; Yuan, H.; Zhou, S.; Wang, Y.; Ikram, R.M.A.; Li, J. An XGBoost-SHAP approach to quantifying morphological impact on urban flooding susceptibility. Ecol. Indic. 2023, 156, 111137. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).