
Remote Sensing Observations of a Coastal Water Environment Based on Neural Network and Spatiotemporal Fusion Technology: A Case Study of Hangzhou Bay



Abstract
1. Introduction
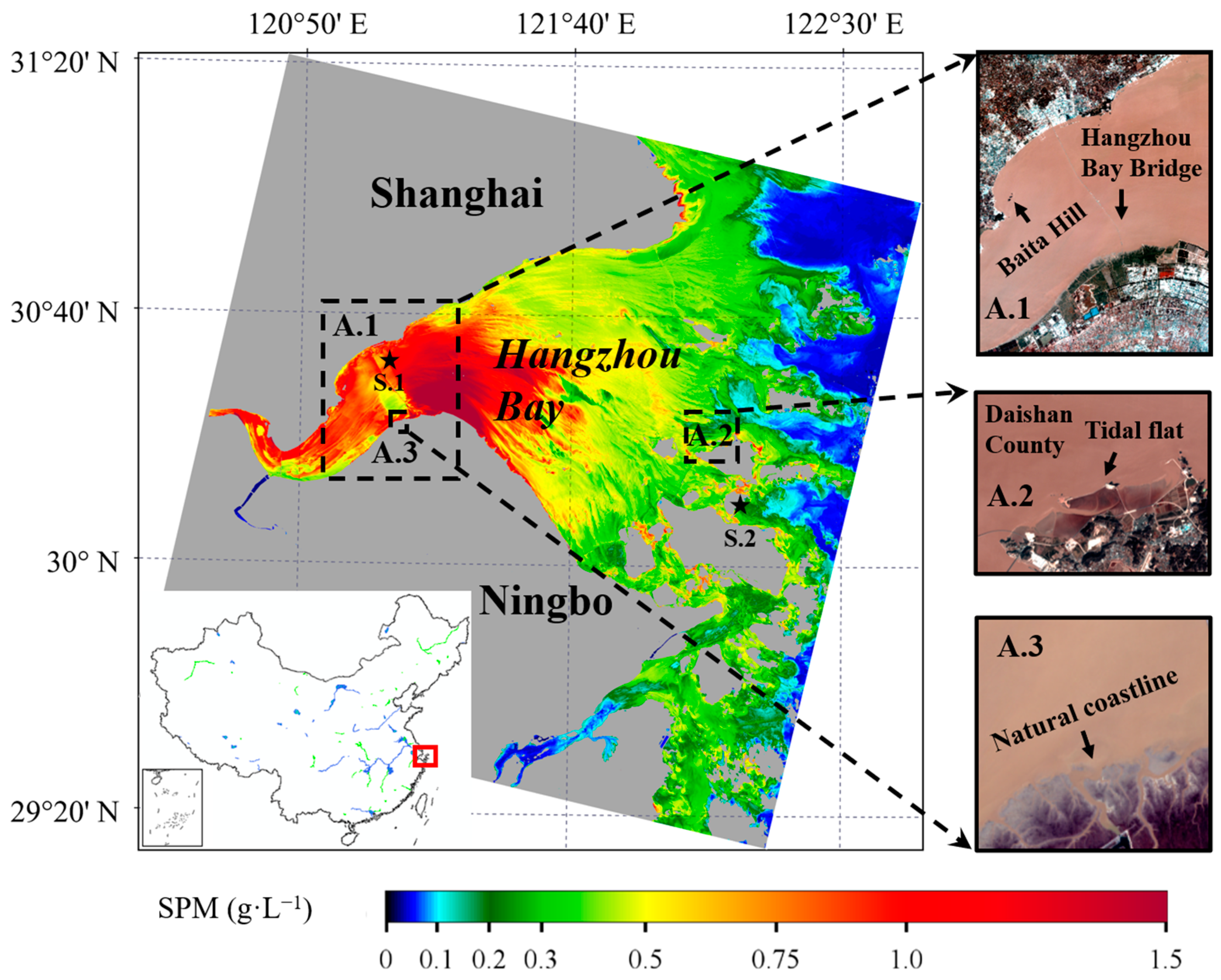
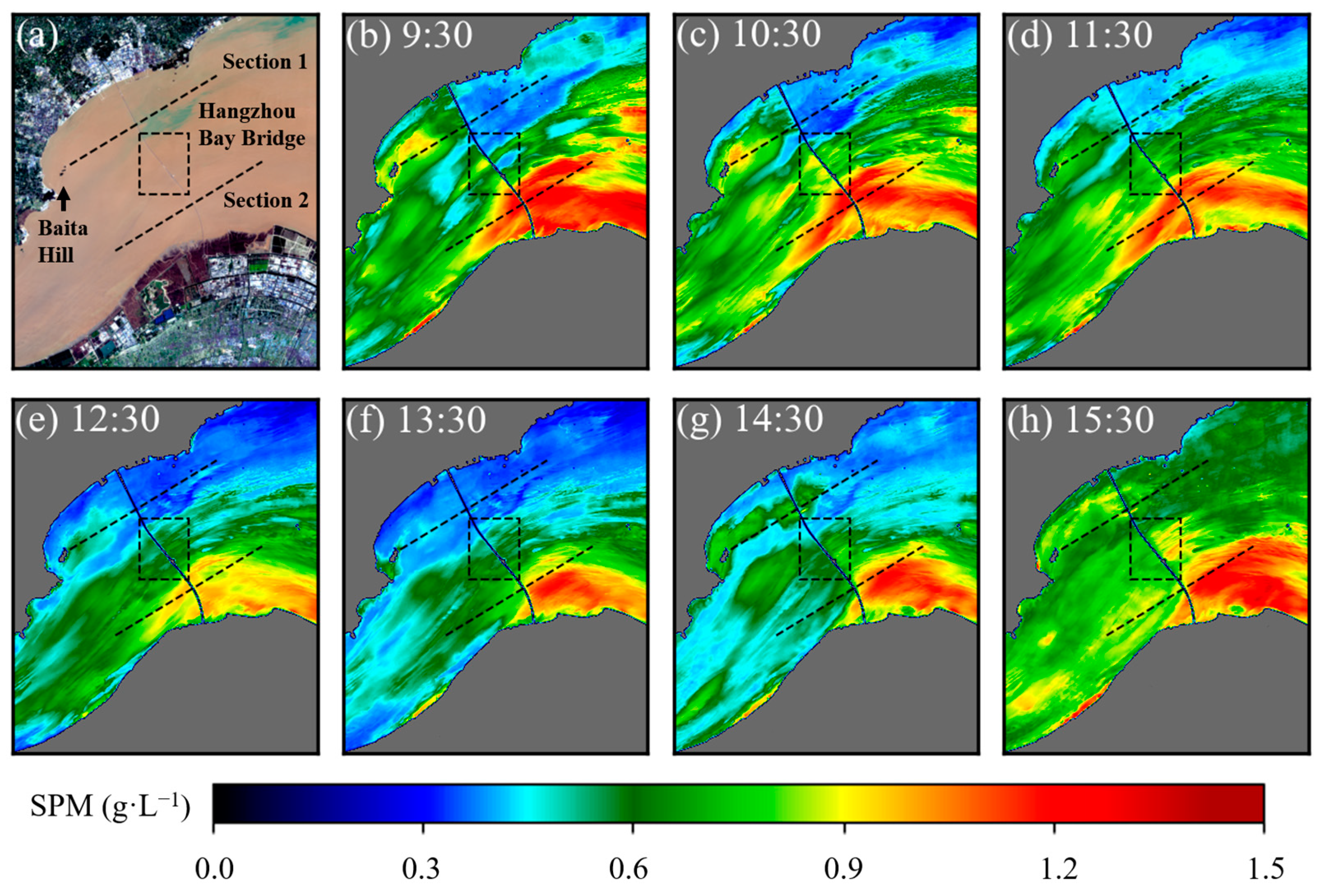
2. Study Area
3. Materials and Methods
3.1. Remote Sensing Data
3.2. Radiometric Calibration
3.3. Atmospheric Correction
3.4. SPM Inversion
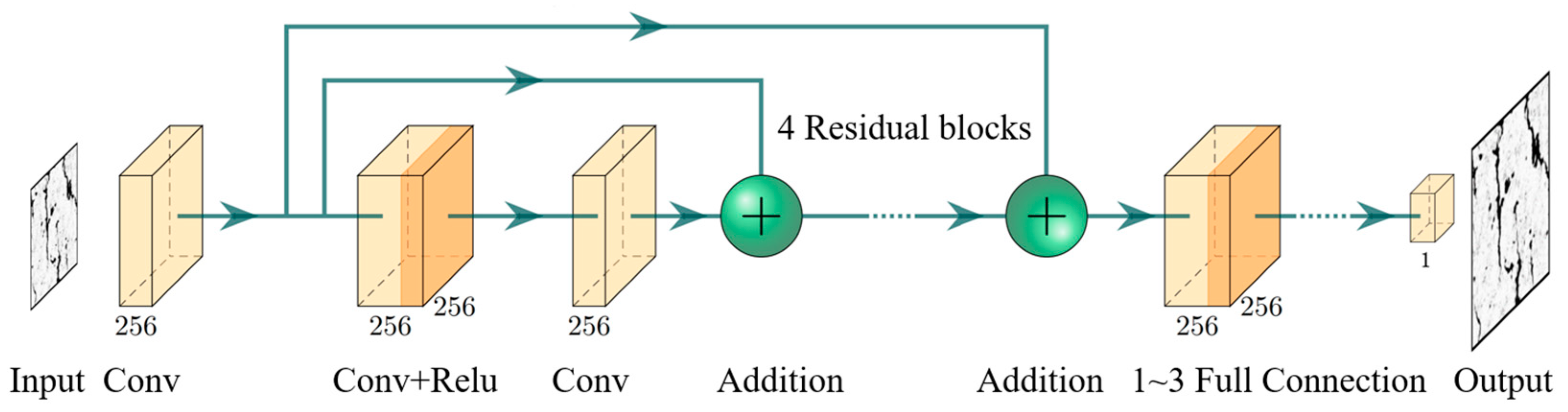
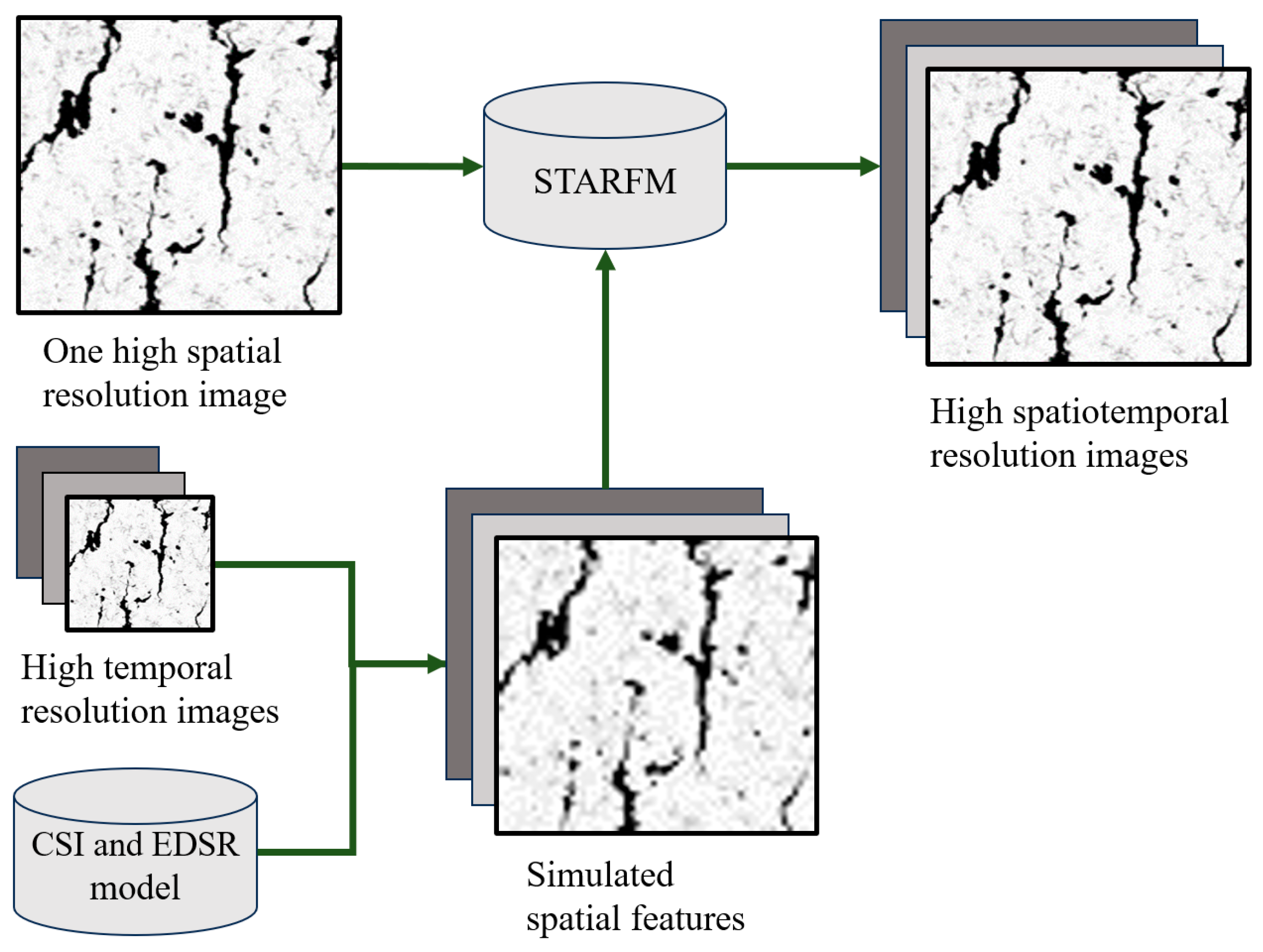
3.5. Neural Network and Spatiotemporal Fusion Model
- (1)
- For all EDSR datasets, the true values correspond to 64 × 64 pixel squares, representing a spatial resolution of 30 m.
- (2)
- The squares mentioned in (1) are resampled to obtain squares with dimensions of 32 × 32 pixels (60 m spatial resolution) and 16 × 16 pixels (120 m spatial resolution), respectively. These squares serve as transitional data for different upscaling EDSR models and can be used as observed values or true values.
- (3)
- The squares mentioned in (1) are resampled to obtain squares with dimensions of 8 × 8 pixels (240 m spatial resolution). These squares, with a spatial resolution close to GOCI-II data, serve as observed values for EDSR models.
3.6. Assessment Methods
4. Results
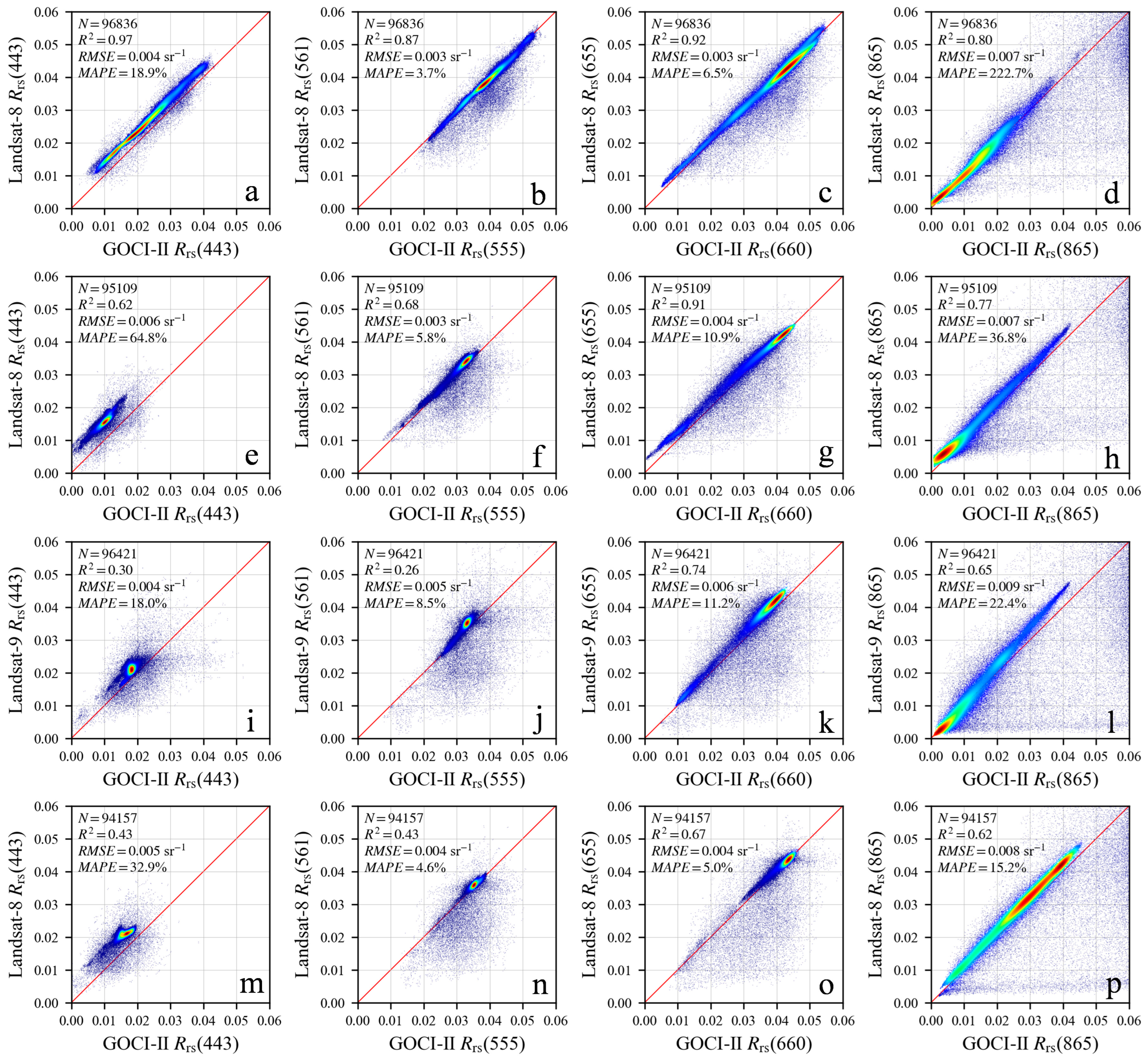
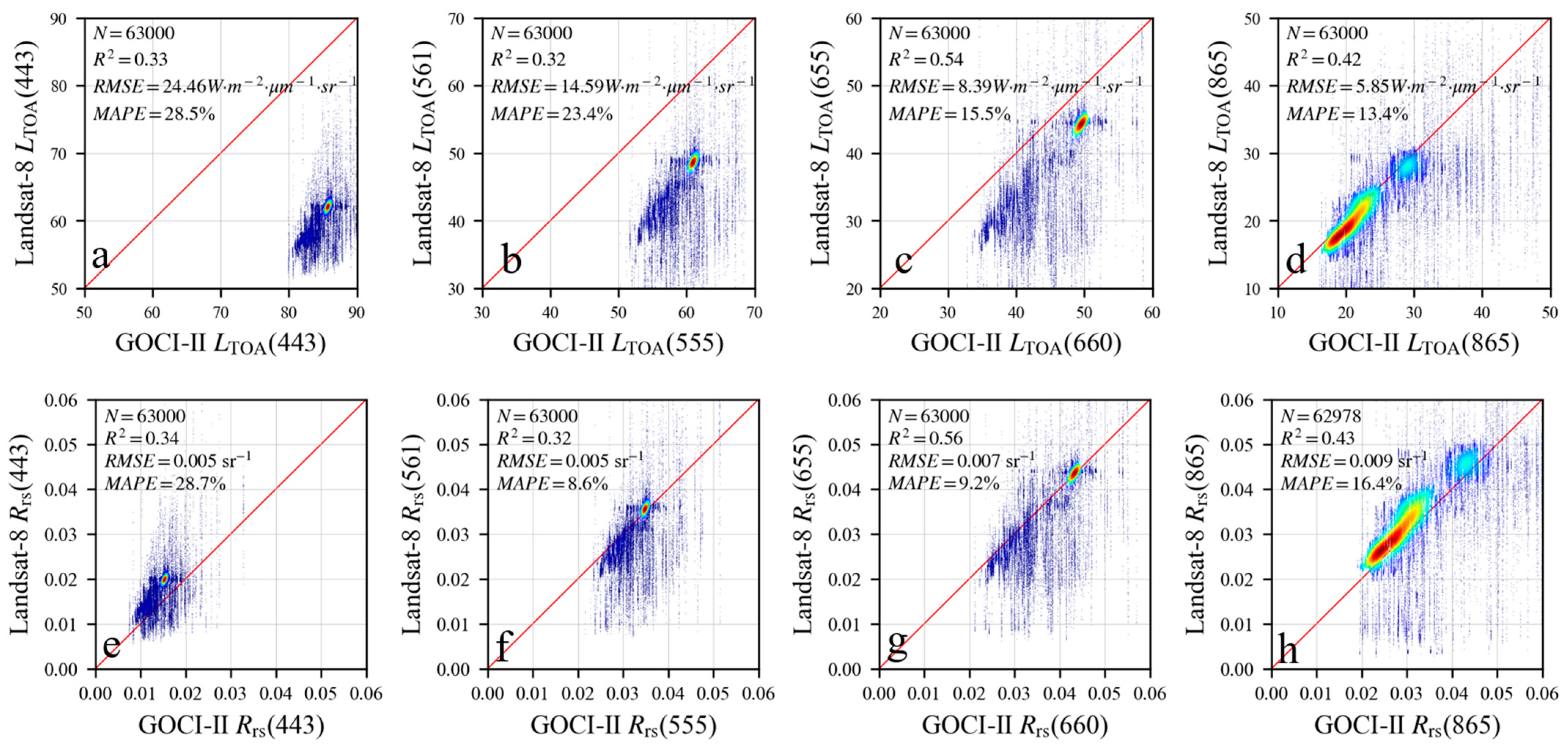
4.1. Cross-Comparison of Landsat-8/9 and GOCI-II
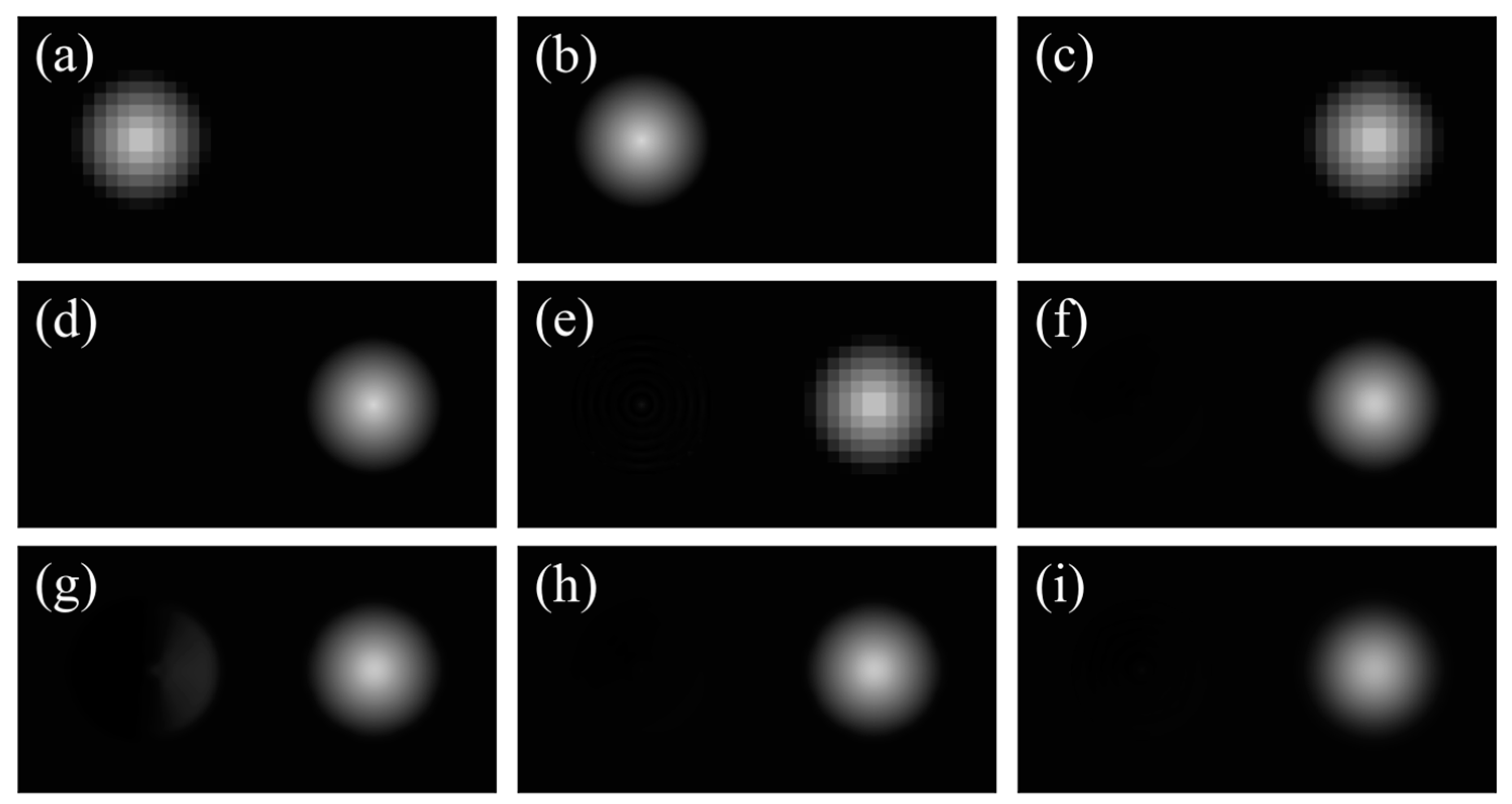
4.2. Evaluation of the Upscaling Model
4.3. Example Applications: Spatiotemporal Variation of Coastal Environments
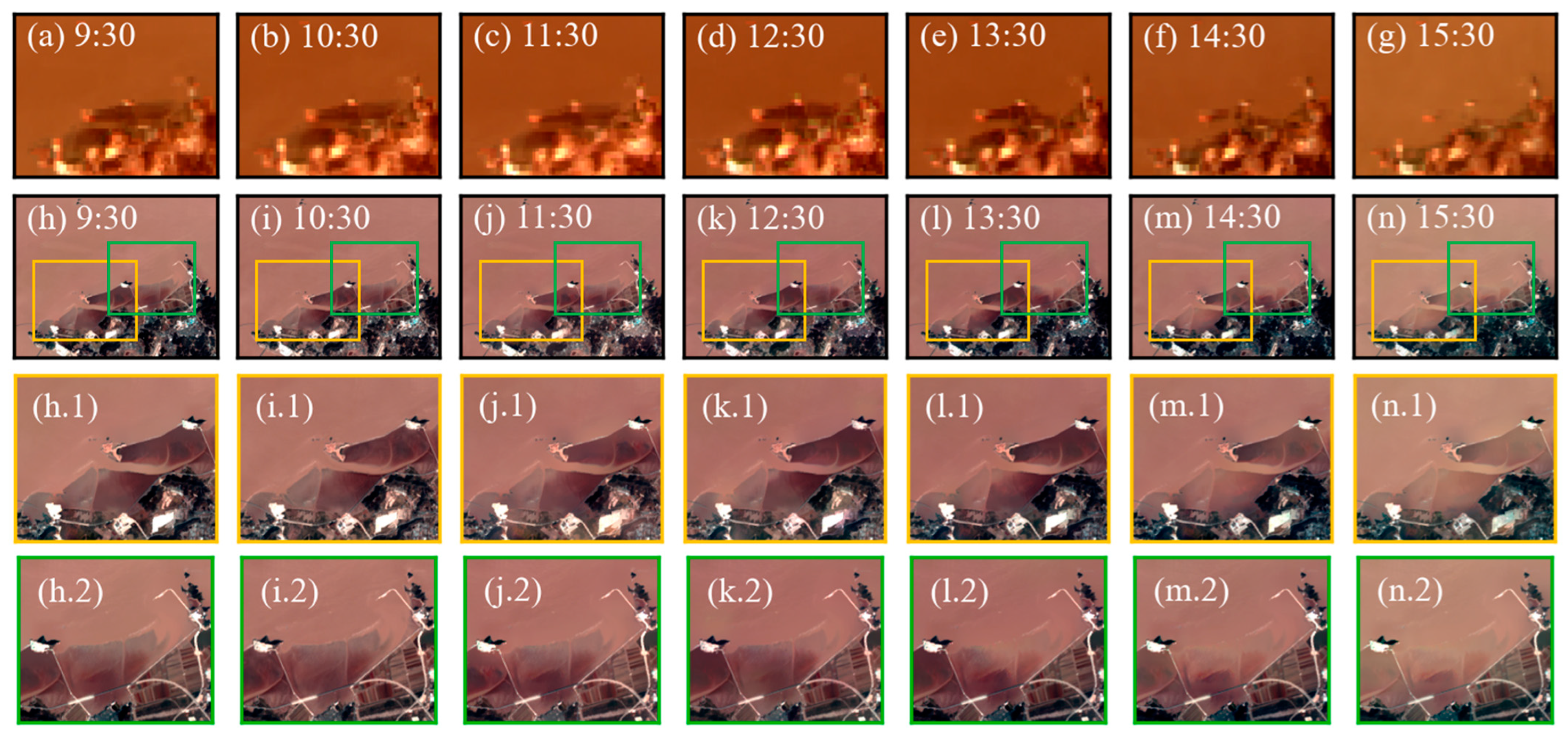
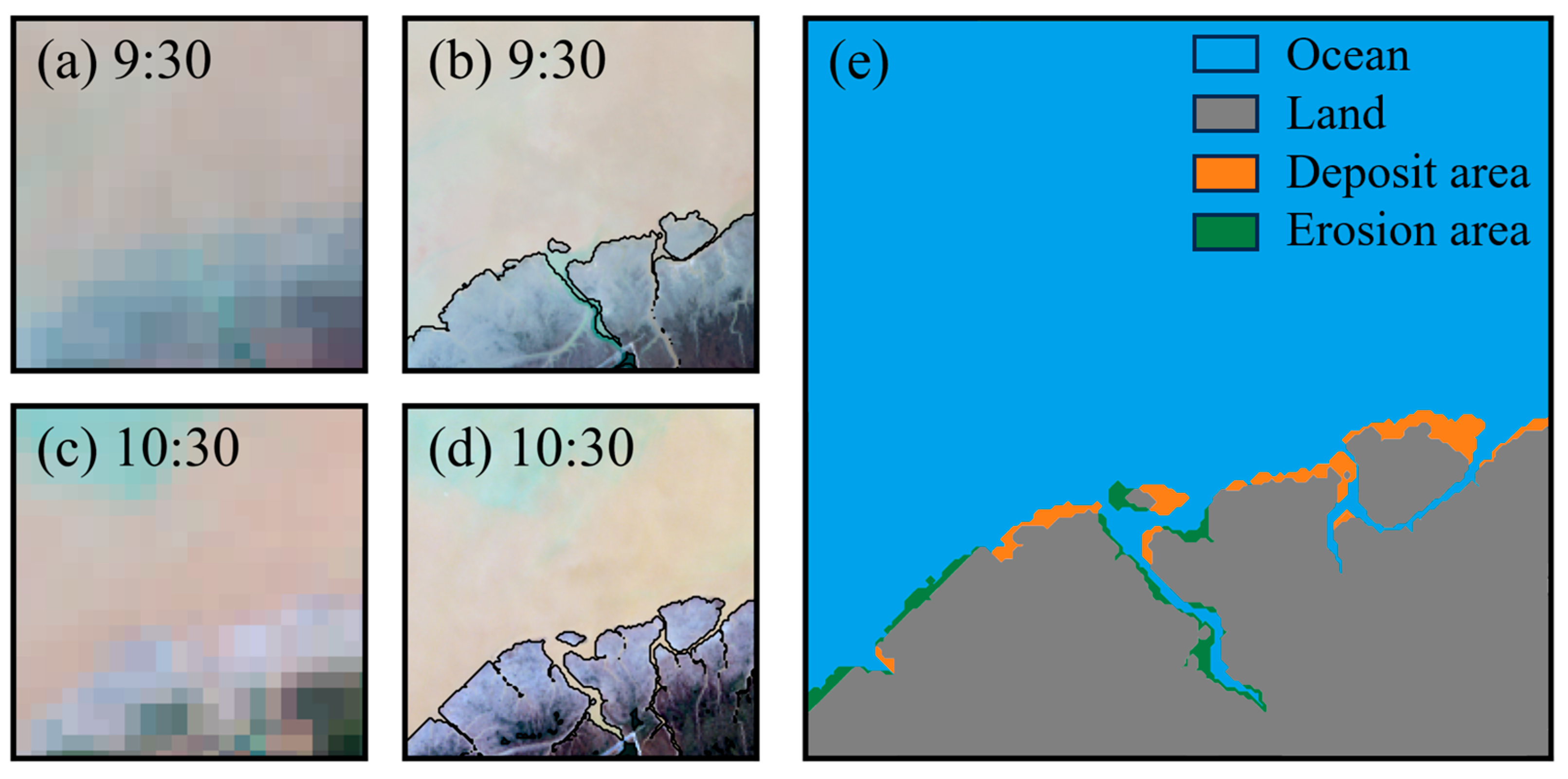
4.3.1. Spatiotemporal Variation of Tidal Flats
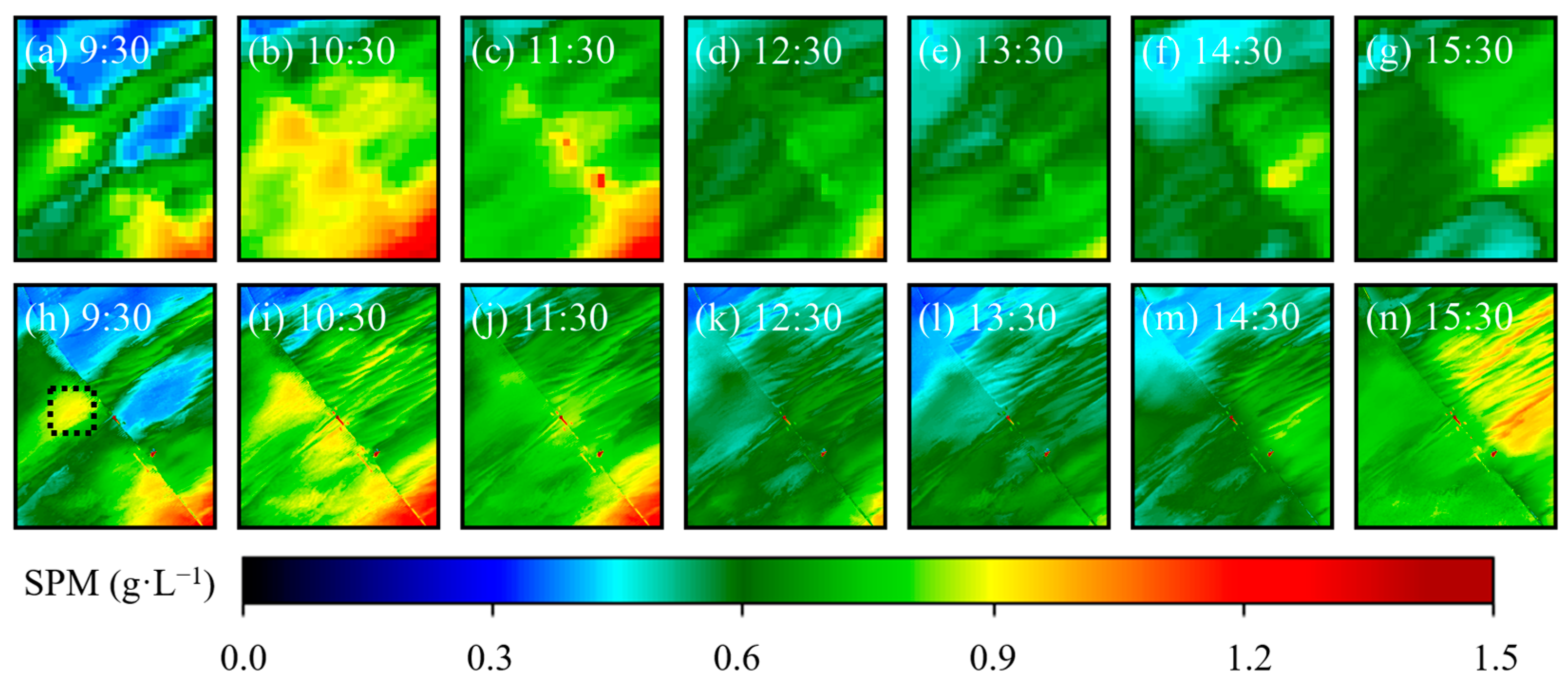
4.3.2. Spatiotemporal Variation of SPM Distribution
4.3.3. Spatiotemporal Variation of Coastline
5. Discussion
5.1. Error Sources and Limitations
5.2. Impact of Network Structure on Feature Reconstruction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vanhellemont, Q.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef]
- Luo, W.; Shen, F.; He, Q.; Cao, F.; Zhao, H.; Li, M. Changes in suspended sediments in the Yangtze River Estuary from 1984 to 2020: Responses to basin and estuarine engineering constructions. Sci. Total Environ. 2022, 805, 150381. [Google Scholar] [CrossRef] [PubMed]
- Tian, L.; Wai, O.W.H.; Chen, X.; Li, W.; Li, J.; Li, W.; Zhang, H. Retrieval of total suspended matter concentration from Gaofen-1 Wide Field Imager (WFI) multispectral imagery with the assistance of Terra MODIS in turbid water—Case in Deep Bay. Int. J. Remote Sens. 2016, 37, 3400–3413. [Google Scholar] [CrossRef]
- Hu, Z.; Pan, D.; He, X.; Song, D.; Huang, N.; Bai, Y.; Xu, Y.; Wang, X.; Zhang, L.; Gong, F. Assessment of the MCC method to estimate sea surface currents in highly turbid coastal waters from GOCI. Int. J. Remote Sens. 2017, 38, 572–597. [Google Scholar] [CrossRef]
- Zhou, Y.; Xuan, J.; Huang, D. Tidal variation of total suspended solids over the Yangtze Bank based on the geostationary ocean color imager. Sci. China Earth Sci. 2020, 63, 1381–1389. [Google Scholar] [CrossRef]
- Chen, C.; Liang, J.; Yang, G.; Sun, W. Spatio-temporal distribution of harmful algal blooms and their correlations with marine hydrological elements in offshore areas, China. Ocean Coast. Manag. 2023, 238, 106554. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.G.; Schwaller, M.R.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar]
- Huang, B.; Zhao, Y. Research status and prospect of spatiotemporal fusion of multi-source satellite remote sensing imagery. Acta Geod. Cartogr. Sin. 2017, 46, 1492–1499. [Google Scholar]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Kim, J.; Hogue, T.S. Evaluation and sensitivity testing of a coupled Landsat-MODIS downscaling method for land surface temperature and vegetation indices in semi-arid regions. J. Appl. Remote Sens. 2012, 6, 63569. [Google Scholar] [CrossRef]
- Ouyang, W.; Hao, F.; Skidmore, A.K.; Groen, T.A.; Toxopeus, A.G.; Wang, T. Integration of multi-sensor data to assess grassland dynamics in a Yellow River sub-watershed. Ecol. Indic. 2012, 18, 163–170. [Google Scholar] [CrossRef]
- Huang, B.; Wang, J.; Song, H.; Fu, D.; Wong, K. Generating High Spatiotemporal Resolution Land Surface Temperature for Urban Heat Island Monitoring. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1011–1015. [Google Scholar] [CrossRef]
- Senf, C.; Leitão, P.J.; Pflugmacher, D.; van der Linden, S.; Hostert, P. Mapping land cover in complex Mediterranean landscapes using Landsat: Improved classification accuracies from integrating multi-seasonal and synthetic imagery. Remote Sens. Environ. 2015, 156, 527–536. [Google Scholar] [CrossRef]
- Zhang, F.; Zhu, X.; Liu, D. Blending MODIS and Landsat images for urban flood mapping. Int. J. Remote Sens. 2014, 35, 3237–3253. [Google Scholar] [CrossRef]
- Chen, C.; Yang, X.; Jiang, S.; Liu, Z. Mapping and spatiotemporal dynamics of land-use and land-cover change based on the Google Earth Engine cloud platform from Landsat imagery: A case study of Zhoushan Island, China. Heliyon 2023, 9, e19654. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Zeng, C.; Li, X.; Wei, Y. Missing data reconstruction in remote sensing image with a unified spatial–temporal–spectral deep convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4274–4288. [Google Scholar] [CrossRef]
- Song, H.; Liu, Q.; Wang, G.; Hang, R.; Huang, B. Spatiotemporal Satellite Image Fusion Using Deep Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 821–829. [Google Scholar] [CrossRef]
- Liu, X.; Deng, C.; Chanussot, J.; Hong, D.; Zhao, B. StfNet: A Two-Stream Convolutional Neural Network for Spatiotemporal Image Fusion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6552–6564. [Google Scholar] [CrossRef]
- Zhang, H.; Song, Y.; Han, C.; Zhang, L. Remote Sensing Image Spatiotemporal Fusion Using a Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4273–4286. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Neukermans, G.; Ruddick, K. Synergy between polar-orbiting and geostationary sensors: Remote sensing of the ocean at high spatial and high temporal resolution. Remote Sens. Environ. 2014, 146, 49–62. [Google Scholar] [CrossRef]
- Pan, Y.; Shen, F.; Wei, X. Fusion of Landsat-8/OLI and GOCI Data for Hourly Mapping of Suspended Particulate Matter at High Spatial Resolution: A Case Study in the Yangtze (Changjiang) Estuary. Remote Sens. 2018, 10, 158. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial-and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Xie, D.; Pan, C.; Wu, X.; Gao, S.; Wang, Z. The variations of sediment transport patterns in the outer Changjiang Estuary and Hangzhou Bay over the last 30 years. J. Geophys. Res. Ocean. 2017, 122, 2999–3020. [Google Scholar] [CrossRef]
- Chen, S.L.; Gu, G.C. Modeling suspended sediment concentrations in the mouth of Hangzhou Bay. J. Sediment Res. 2000, 5, 45–50. [Google Scholar]
- Xie, D.; Wang, Z.; Gao, S.; De Vriend, H.J. Modeling the tidal channel morphodynamics in a macro-tidal embayment, Hangzhou Bay, China. Cont. Shelf Res. 2009, 29, 1757–1767. [Google Scholar] [CrossRef]
- Qiao, S.; Pan, D.; He, X.; Cui, Q. Numerical Study of the Influence of Donghai Bridge on Sediment Transport in the Mouth of Hangzhou Bay. Procedia Environ. Sci. 2011, 10, 408–413. [Google Scholar] [CrossRef]
- Shi, Y.; Huang, C.; Shi, S.; Gong, J. Tracking of Land Reclamation Activities Using Landsat Observations—An Example in Shanghai and Hangzhou Bay. Remote Sens. 2022, 14, 464. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of metre-scale optical satellite data for inland and coastal water applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- Ahn, Y.H.; Ryu, J.H.; Cho, S.I.; Kim, S.H. Missions and User Requirements of the 2nd Geostationary Ocean Color Imager (GOCI-II). Korean J. Remote Sens. 2010, 26, 277–285. [Google Scholar]
- Vermote, E.F.; Tanré, D.; Deuze, J.L.; Herman, M.; Morcette, J. Second Simulation of the Satellite Signal in the Solar Spectrum, 6S: An overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Gordon, H.R.; Brown, J.W.; Evans, R.H. Exact Rayleigh scattering calculations for use with the Nimbus-7 Coastal Zone Color Scanner. Appl. Opt. 1988, 27, 862–871. [Google Scholar] [CrossRef] [PubMed]
- Harmel, T.; Chami, M.; Tormos, T.; Reynaud, N.; Danis, P. Sunglint correction of the Multi-Spectral Instrument (MSI)-SENTINEL-2 imagery over inland and sea waters from SWIR bands. Remote Sens. Environ. 2018, 204, 308–321. [Google Scholar] [CrossRef]
- Shen, F.; Zhou, Y.; Li, J.; He, Q.; Verhoef, W. Remotely sensed variability of the suspended sediment concentration and its response to decreased river discharge in the Yangtze estuary and adjacent coast. Cont. Shelf Res. 2013, 69, 52–61. [Google Scholar] [CrossRef]
- Shen, F.; Verhoef, W.; Zhou, Y.; Salama, M.S.; Liu, X. Satellite Estimates of Wide-Range Suspended Sediment Concentrations in Changjiang (Yangtze) Estuary Using MERIS Data. Estuaries Coasts 2010, 33, 1420–1429. [Google Scholar] [CrossRef]
- Shen, F.; Zhou, Y.; Peng, X.; Chen, Y. Satellite multi-sensor mapping of suspended particulate matter in turbid estuarine and coastal ocean, China. Int. J. Remote Sens. 2014, 35, 4173–4192. [Google Scholar] [CrossRef]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Lee, K.M. Enhanced Deep Residual Networks for Single Image Super-Resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 1132–1140. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Dong, C.; Loy, C.C.; Tang, X. Accelerating the Super-Resolution Convolutional Neural Network. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin/Heidelberg, Germany, 2016. Part II 14. pp. 391–407. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Horé, A.; Ziou, D. Image Quality Metrics: PSNR vs. SSIM. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2366–2369. [Google Scholar]
- Liu, M.; Shen, F.; Ge, J.Z.; Kong, Y.Z. Diurnal variation of suspended sediment concentration in Hangzhou Bay from geostationary satellite observation and its hydrodynamic analysis. J. Sediment Res. 2013, 1, 7–13. [Google Scholar]
- Skrbek, L.; Vinen, W.F. The Use of Vibrating Structures in the Study of Quantum Turbulence. In Progress in Low Temperature Physics; Elsevier: Amsterdam, The Netherlands, 2009; Volume 16, pp. 195–246. [Google Scholar]
- Ahmad, N.; Kamath, A.; Bihs, H. 3D numerical modelling of scour around a jacket structure with dynamic free surface capturing. Ocean Eng. 2020, 200, 107104. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; Van Niel, T.G.; Li, L.T.; Van Dijk, A.I. Assessing the accuracy of blending Landsat–MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]
- Gevaert, C.M.; García-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.G.; Wolfe, R.E.; Huang, C. Building a consistent medium resolution satellite data set using moderate resolution imaging spectroradiometer products as reference. J. Appl. Remote Sens. 2010, 4, 43526. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bands (nm) | α | β |
|---|---|---|
| 561 | 0.0509 | 32.2256 |
| 655 | 0.0762 | 11.5345 |
| 865 | 0.1038 | 1.8042 |
| Models | PSNR | SSIM |
|---|---|---|
| CSI_240_30 | 29.49 | 0.7797 |
| CSI_240_60, EDSR_60_30 | 29.83 | 0.7806 |
| CSI_240_120, EDSR_120_30 | 30.06 | 0.7814 |
| EDSR_240_120, CSI_120_30 | 30.29 | 0.7845 |
| EDSR_240_60, CSI_60_30 | 30.11 | 0.7779 |
| EDSR_240_30 | 30.12 | 0.7831 |
| EDSR_240_120, EDSR_120_30 | 30.11 | 0.7788 |
| EDSR_240_60, EDSR_60_30 | 29.97 | 0.7783 |
| Fusion Data in Figure 13 | R2 | MAPE | PSNR | SSIM |
|---|---|---|---|---|
| (e) | 0.983 | 48.1% | 42.35 | 0.9415 |
| (f) | 0.998 | 20.1% | 51.88 | 0.9793 |
| (g) | 0.930 | 51.95% | 35.84 | 0.8529 |
| (h) | 0.998 | 19.55% | 51.86 | 0.9790 |
| (i) | 0.994 | 21.96% | 43.98 | 0.9646 |
| Models | PSNR | SSIM |
|---|---|---|
| CSI_240_30 | 29.49 | 0.7797 |
| CSI_240_60, EDSR*_60_30 | 29.48 | 0.7786 |
| CSI_240_120, EDSR*_120_30 | 29.41 | 0.7756 |
| EDSR*_240_120, CSI_120_30 | 28.99 | 0.7733 |
| EDSR*_240_60, CSI_60_30 | 29.40 | 0.7732 |
| EDSR*_240_30 | 29.80 | 0.7784 |
| EDSR*_240_120, EDSR*_120_30 | 28.99 | 0.7704 |
| EDSR*_240_60, EDSR*_60_30 | 29.50 | 0.7786 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, R.; Wei, X.; Chen, C.; Jiang, R.; Shen, F. Remote Sensing Observations of a Coastal Water Environment Based on Neural Network and Spatiotemporal Fusion Technology: A Case Study of Hangzhou Bay. Remote Sens. 2024, 16, 800. https://doi.org/10.3390/rs16050800
Tang R, Wei X, Chen C, Jiang R, Shen F. Remote Sensing Observations of a Coastal Water Environment Based on Neural Network and Spatiotemporal Fusion Technology: A Case Study of Hangzhou Bay. Remote Sensing. 2024; 16(5):800. https://doi.org/10.3390/rs16050800
Chicago/Turabian StyleTang, Rugang, Xiaodao Wei, Chao Chen, Rong Jiang, and Fang Shen. 2024. "Remote Sensing Observations of a Coastal Water Environment Based on Neural Network and Spatiotemporal Fusion Technology: A Case Study of Hangzhou Bay" Remote Sensing 16, no. 5: 800. https://doi.org/10.3390/rs16050800
APA StyleTang, R., Wei, X., Chen, C., Jiang, R., & Shen, F. (2024). Remote Sensing Observations of a Coastal Water Environment Based on Neural Network and Spatiotemporal Fusion Technology: A Case Study of Hangzhou Bay. Remote Sensing, 16(5), 800. https://doi.org/10.3390/rs16050800