
Radar Reconnaissance Pulse-Splitting Modeling and Detection Method

 ,
,  , , , and
, , , and
Abstract
1. Introduction
- The split-site theory is proposed to describe the mechanism of split pulses in different ways. Then, based on the split pulse law of the experimental data, the split pulse signal model and the statistical model of the number of split pulses using the geometric distribution are constructed, respectively. Subsequently, simulation data of split pulses with various characteristics are generated using the proposed model.
- A convergence degree in the time domain is proposed to represent pulse splitting. Additionally, based on the TCD, an empirical formula is provided for the threshold of pulse-splitting detection. This formula helps to avoid the low detection efficiency that can be caused by a large number of threshold searches in pulse splitting detection, enabling the reliable assessment of pulse splitting in a radar pulse stream.
2. Pulse-Splitting Model
2.1. Modeling Pulse-Splitting Phenomena
2.1.1. Split Pulse Generation Mechanism
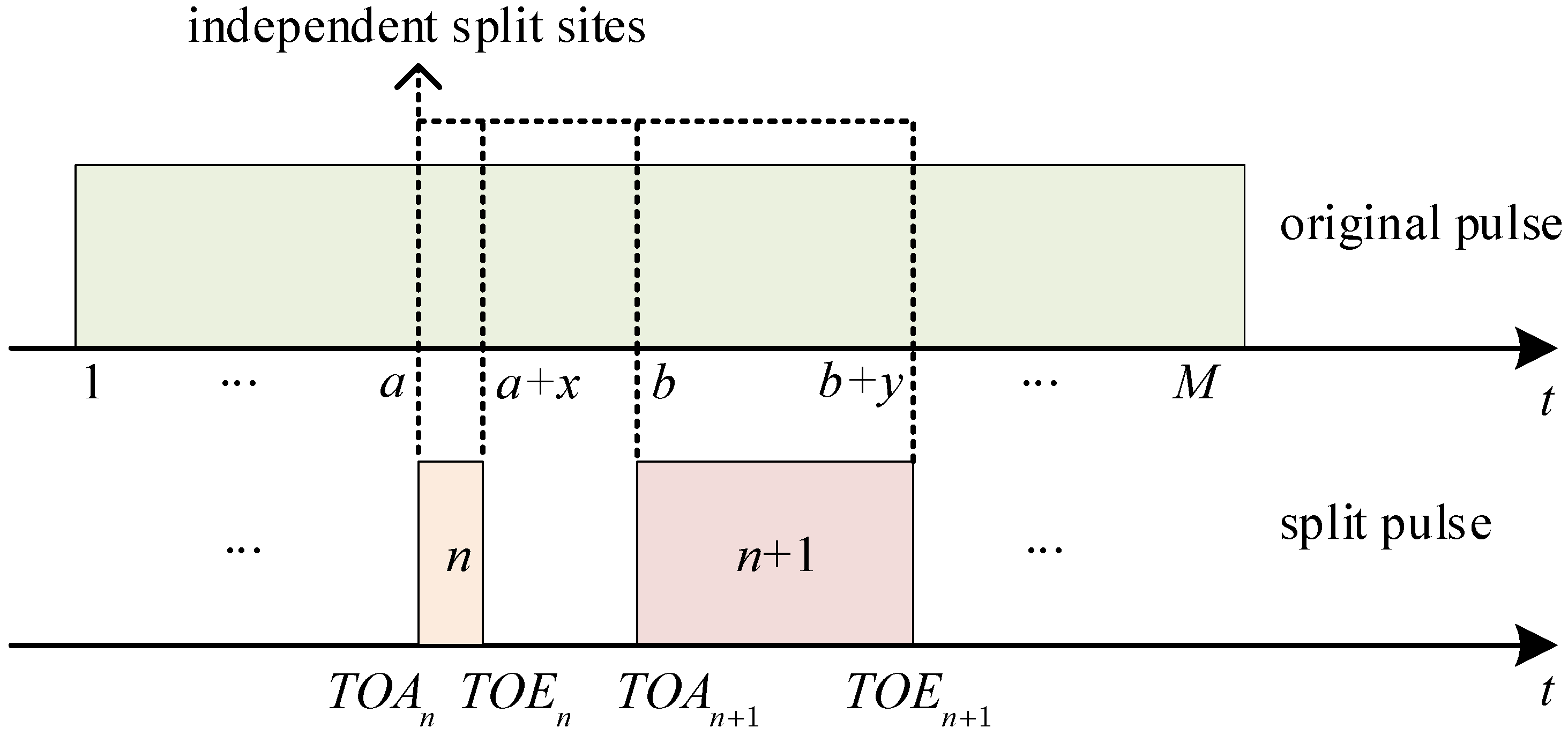
- Split Site Theory
- The split sites in a complete pulse are not allowed to be reused; that is, a split site can only be used as the leading edge or trailing edge of a split pulse.
- The current split site can only generate a split pulse with the next split site.
- Split pulses are only allowed to be generated in a single complete pulse.
- The first split site must be located at the leading edge of the complete pulse, and the last split site must be located at the trailing edge of the complete pulse.
- All split sites within a complete pulse must be used.
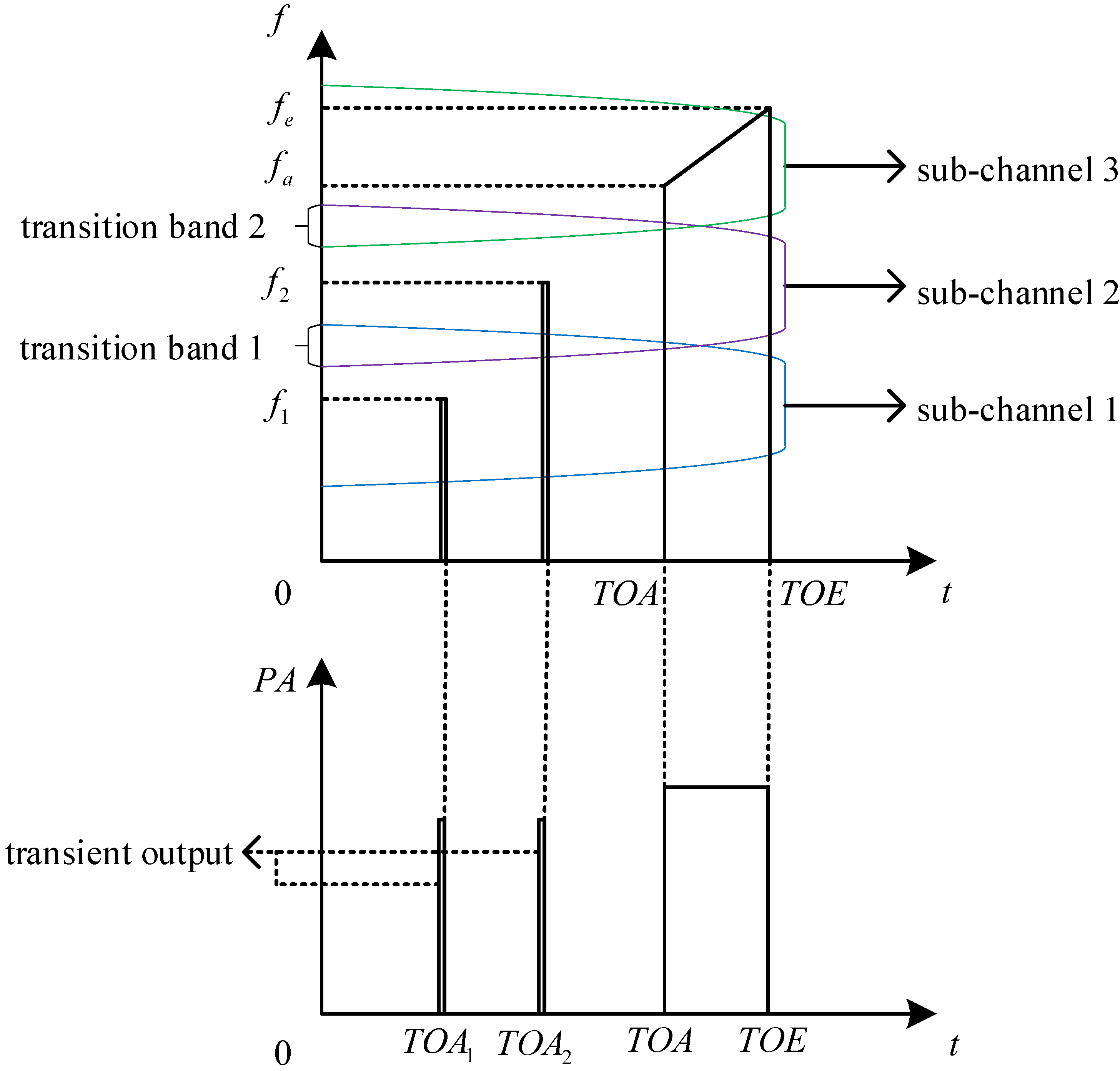
- Cross-channel splitting signal
- Rabbit Ear Effect
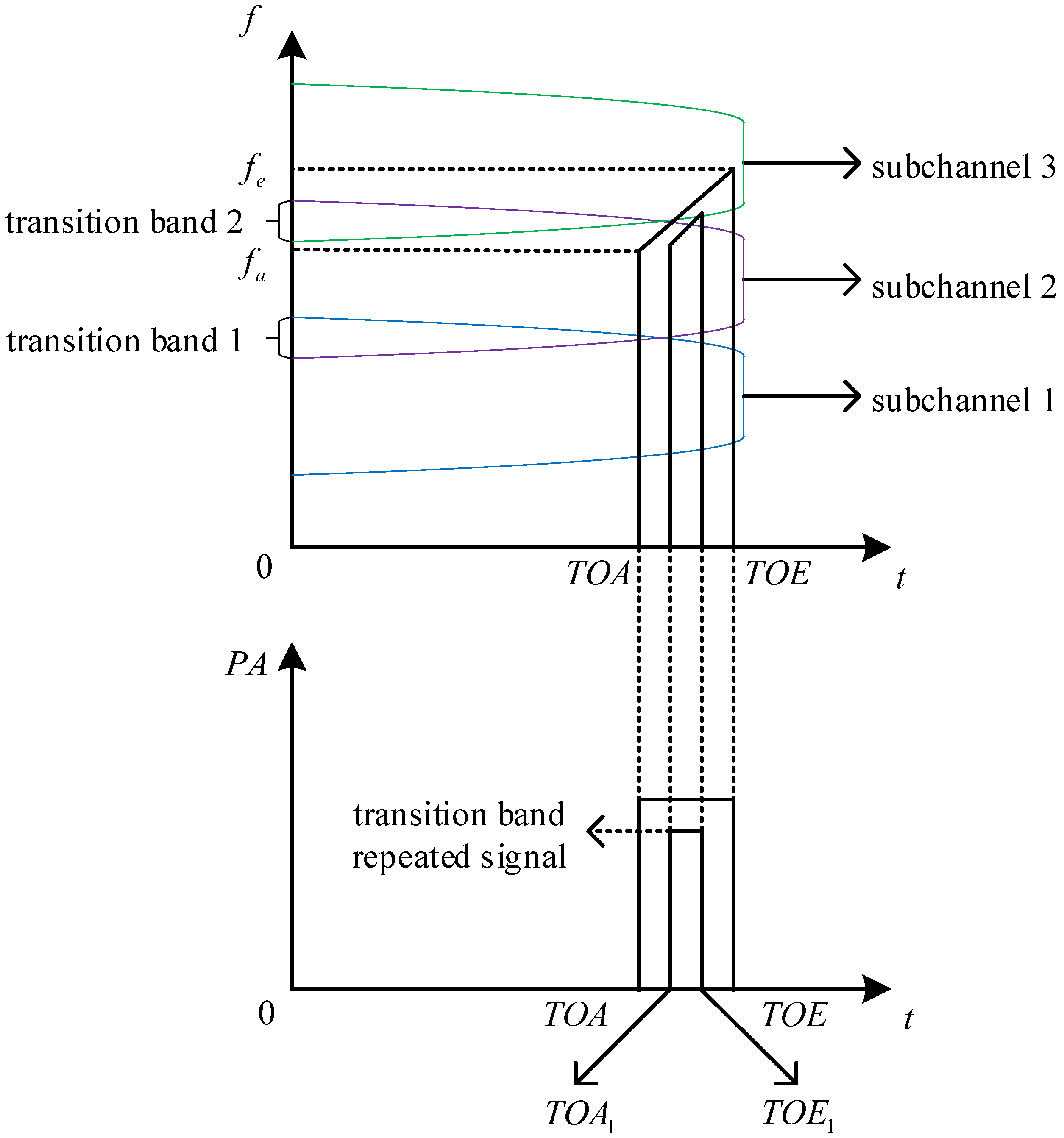
- Transition Band Repeated Signal
- Split PDW Value Range
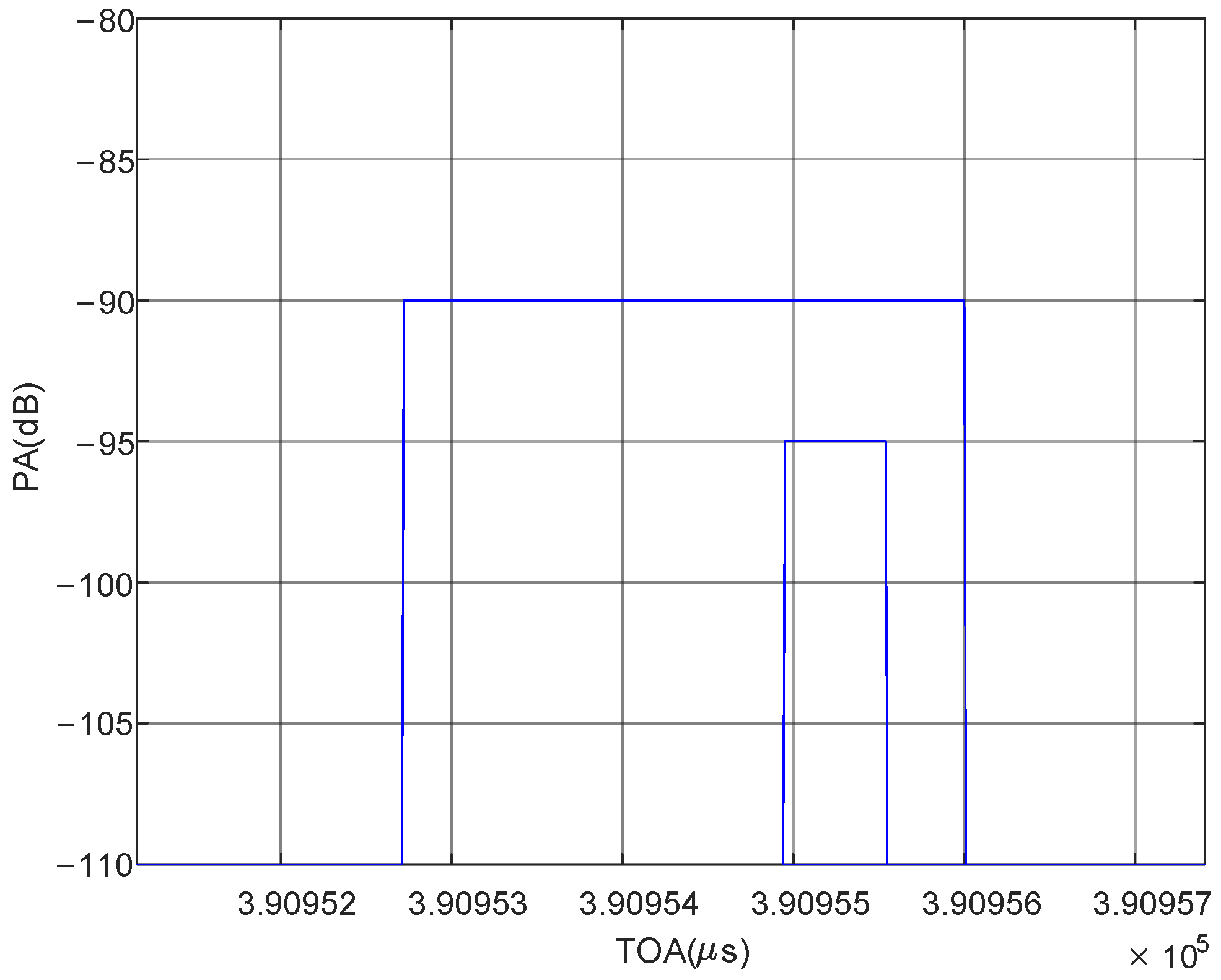
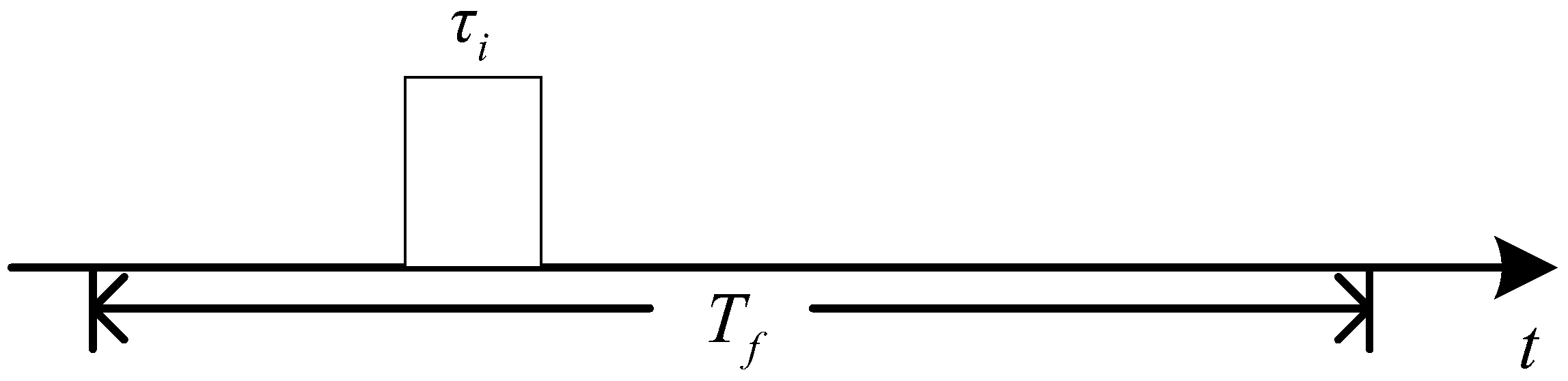
2.1.2. Split Pulse Signal Model
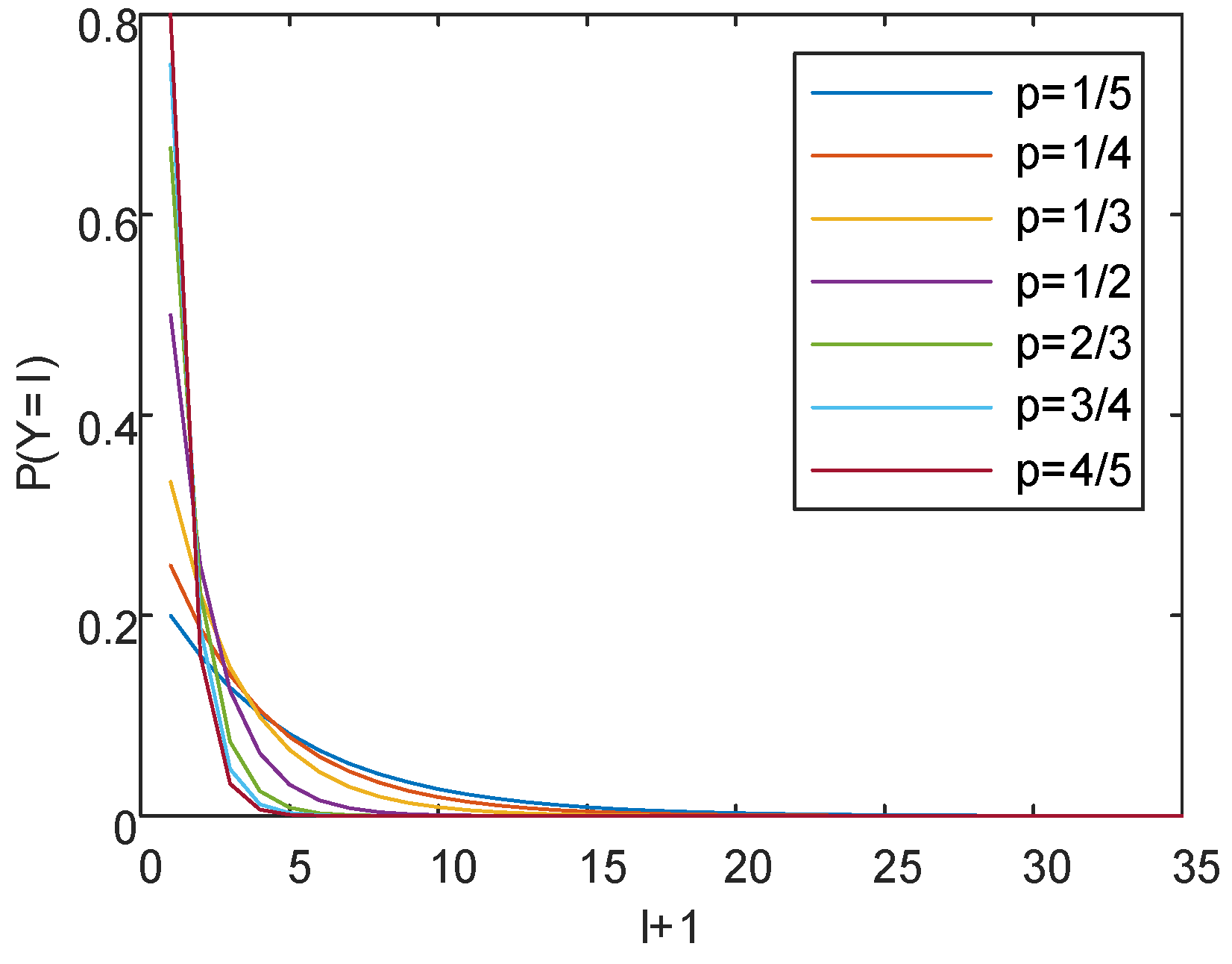
2.1.3. Statistical Model of Split Pulse Number Based on Geometric Distribution
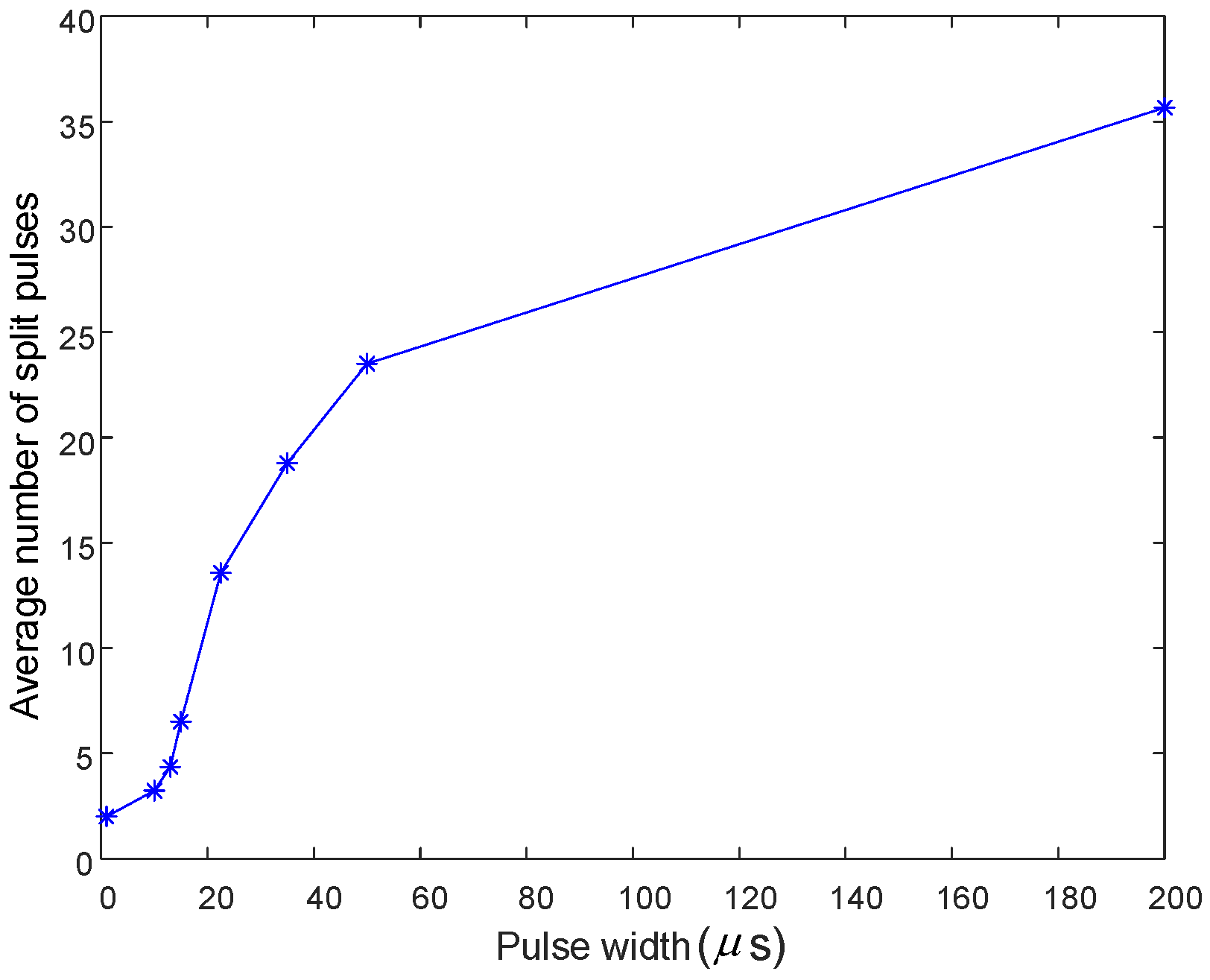
- Effect of PW and PA on Split Pulse Number
2.2. Building the Split Pulse Flow
2.2.1. Pulse Flow Density
2.2.2. Pulse-Splitting Degree
2.2.3. Pulse Staggering Degree
2.2.4. PRI Modulation Complexity
2.2.5. Integrated Pulse Flow Characteristics
2.2.6. Reference Label Generation Method
3. Split Pulse Detection
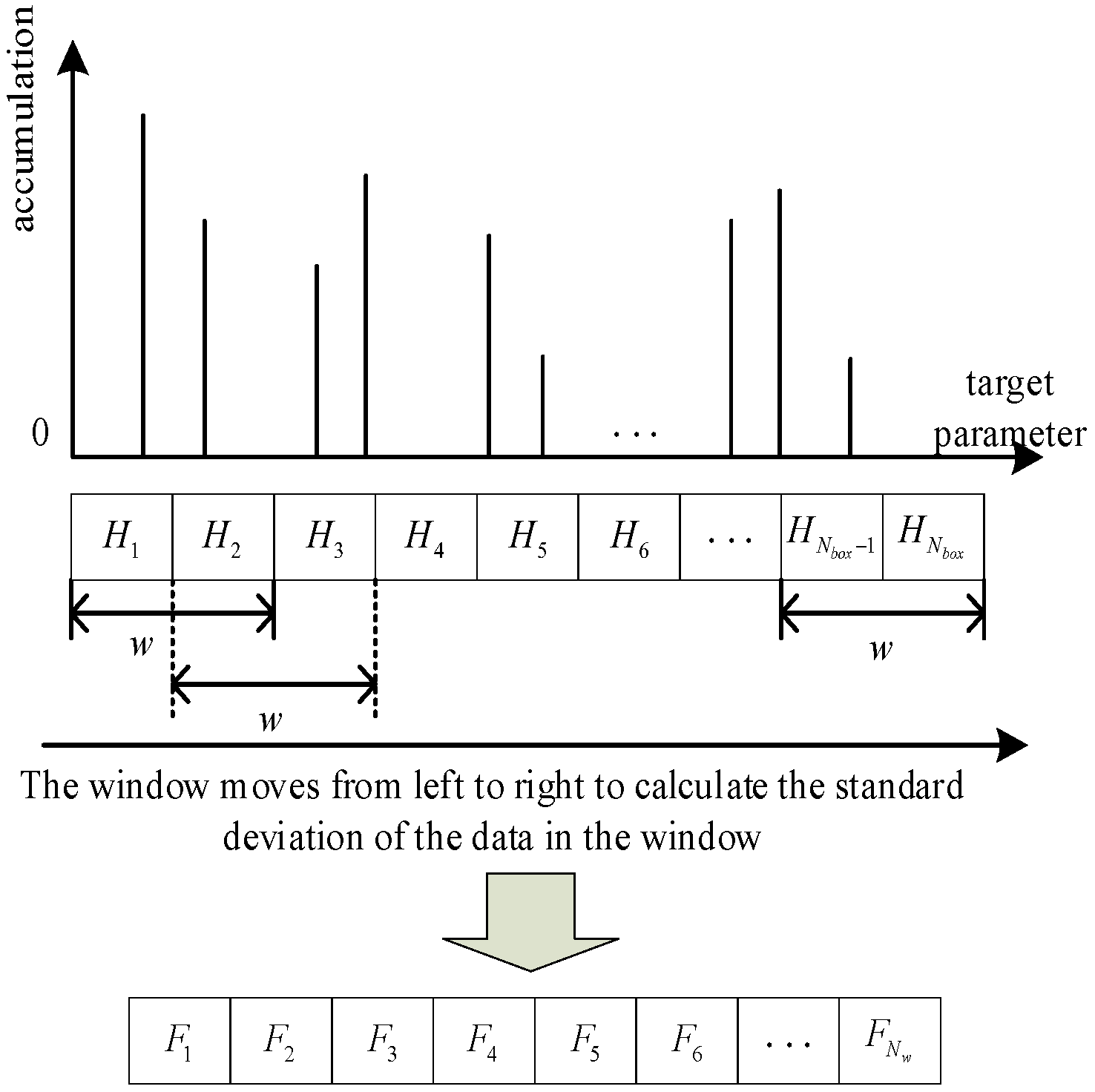
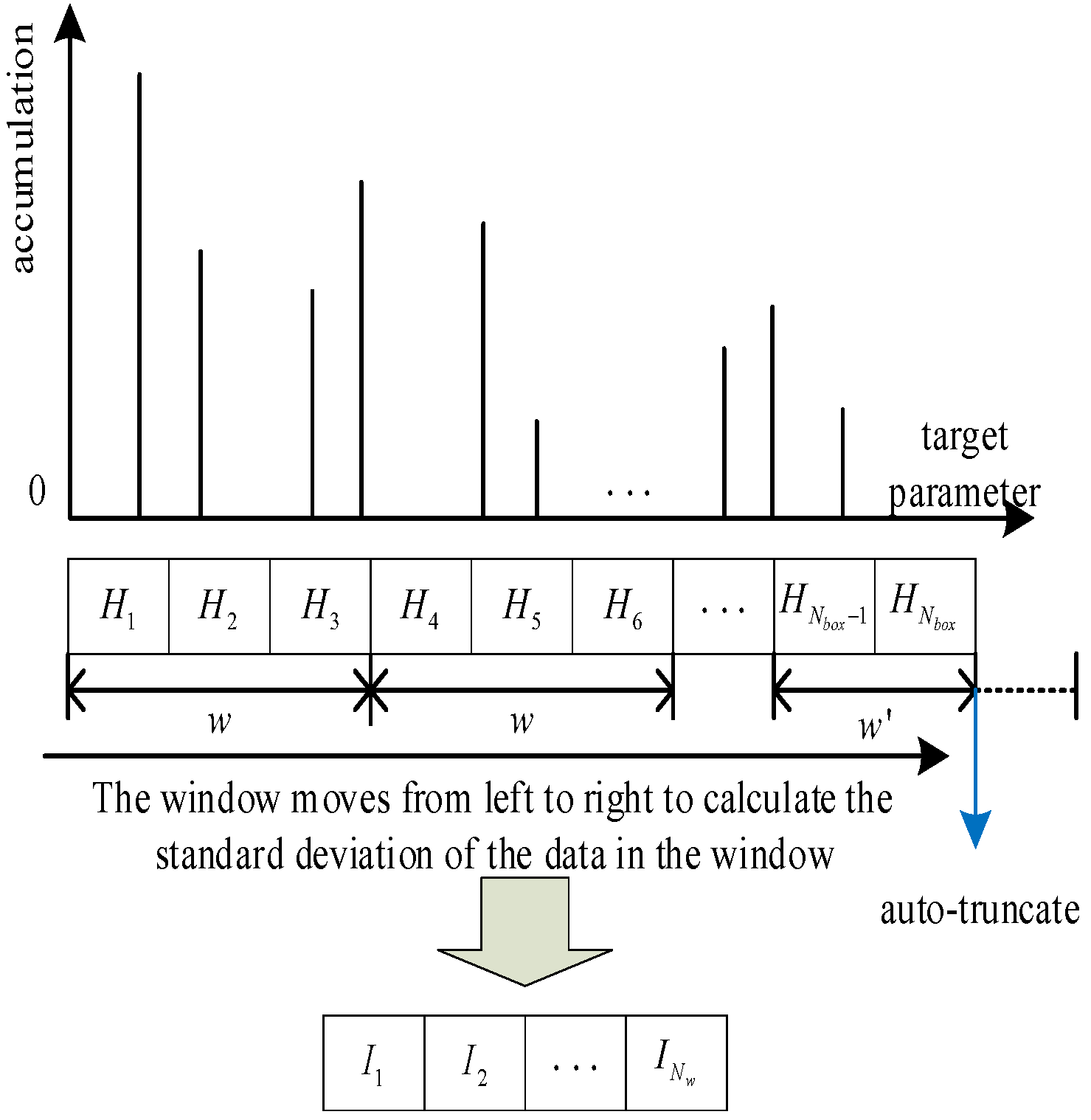
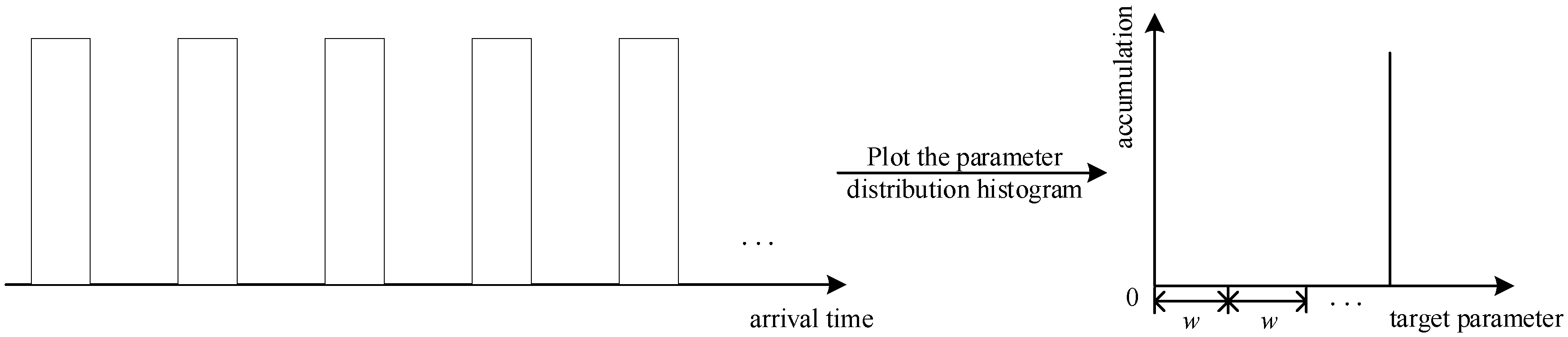
3.1. Framing the Pulse Stream
3.2. TCD
3.3. Split Pulse Detection Indicator
- PW
- Duty Cycle (DC)
3.4. Empirical Formula of Splitting Pulse Detection Threshold
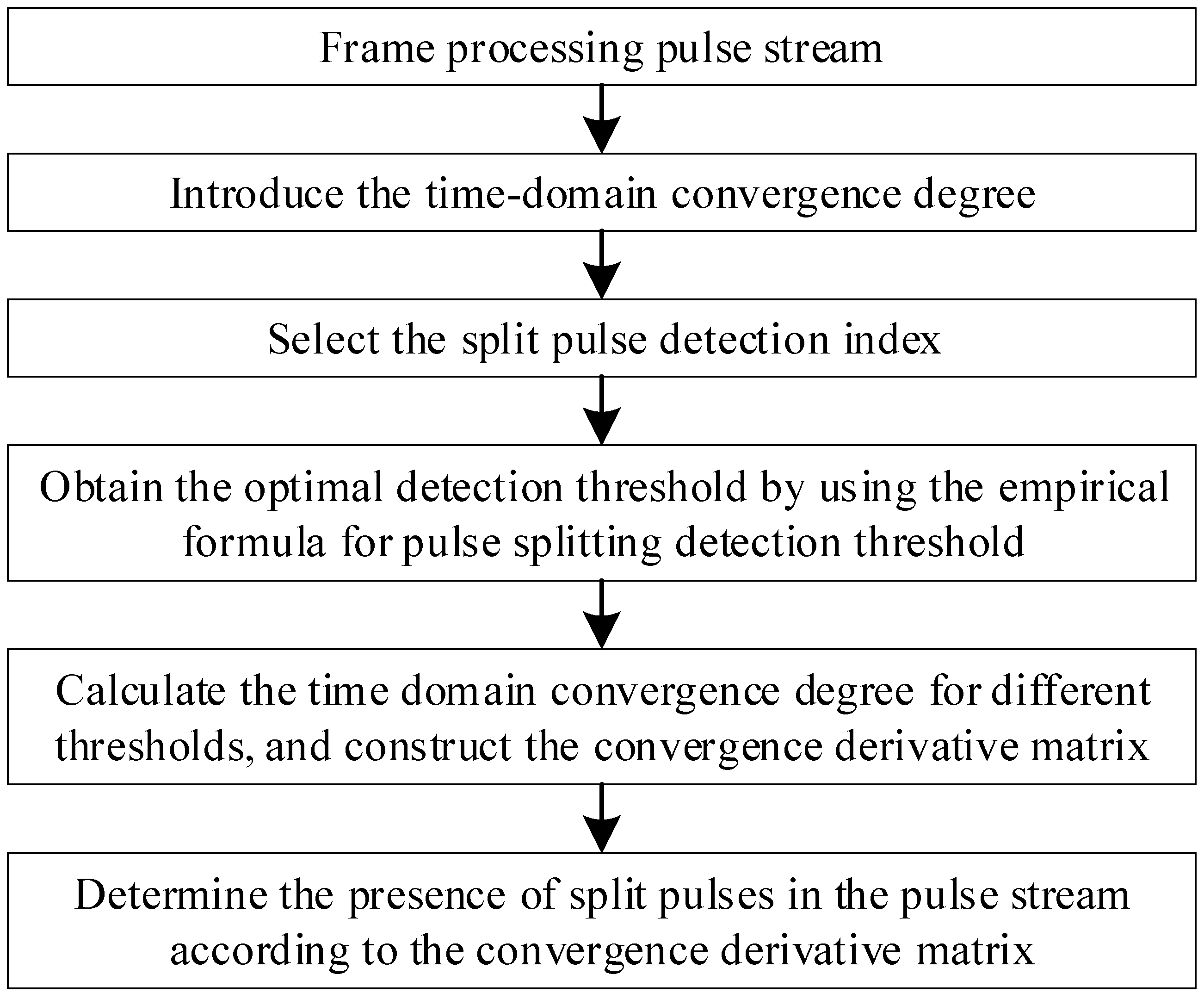
3.5. Radar Split Pulse Detection Method
4. Simulation Analysis and Verification
4.1. Parameter Setting
4.2. Verification of the Statistical Distribution of the Split Pulse Number
4.3. Performance Analysis of Algorithms
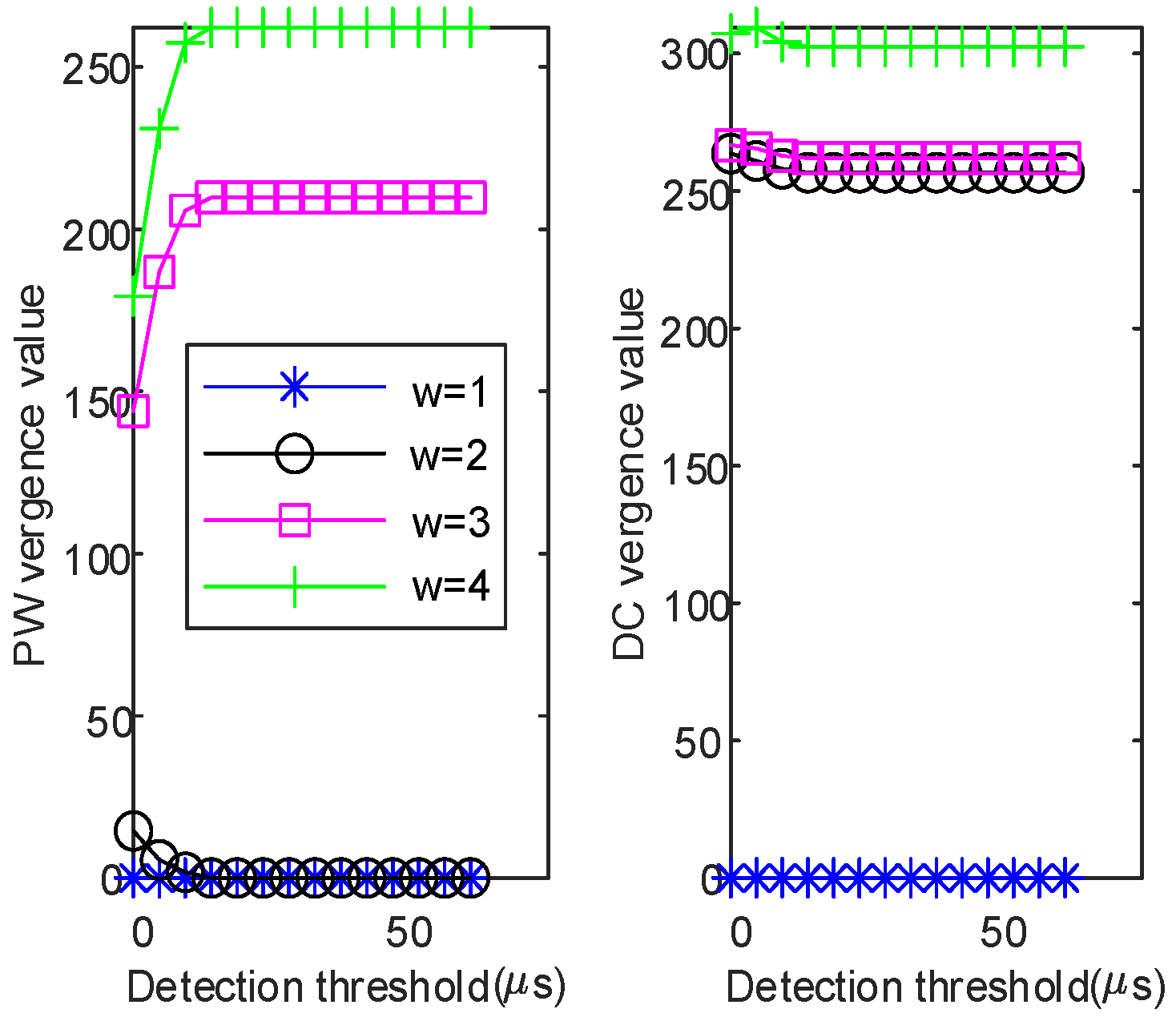
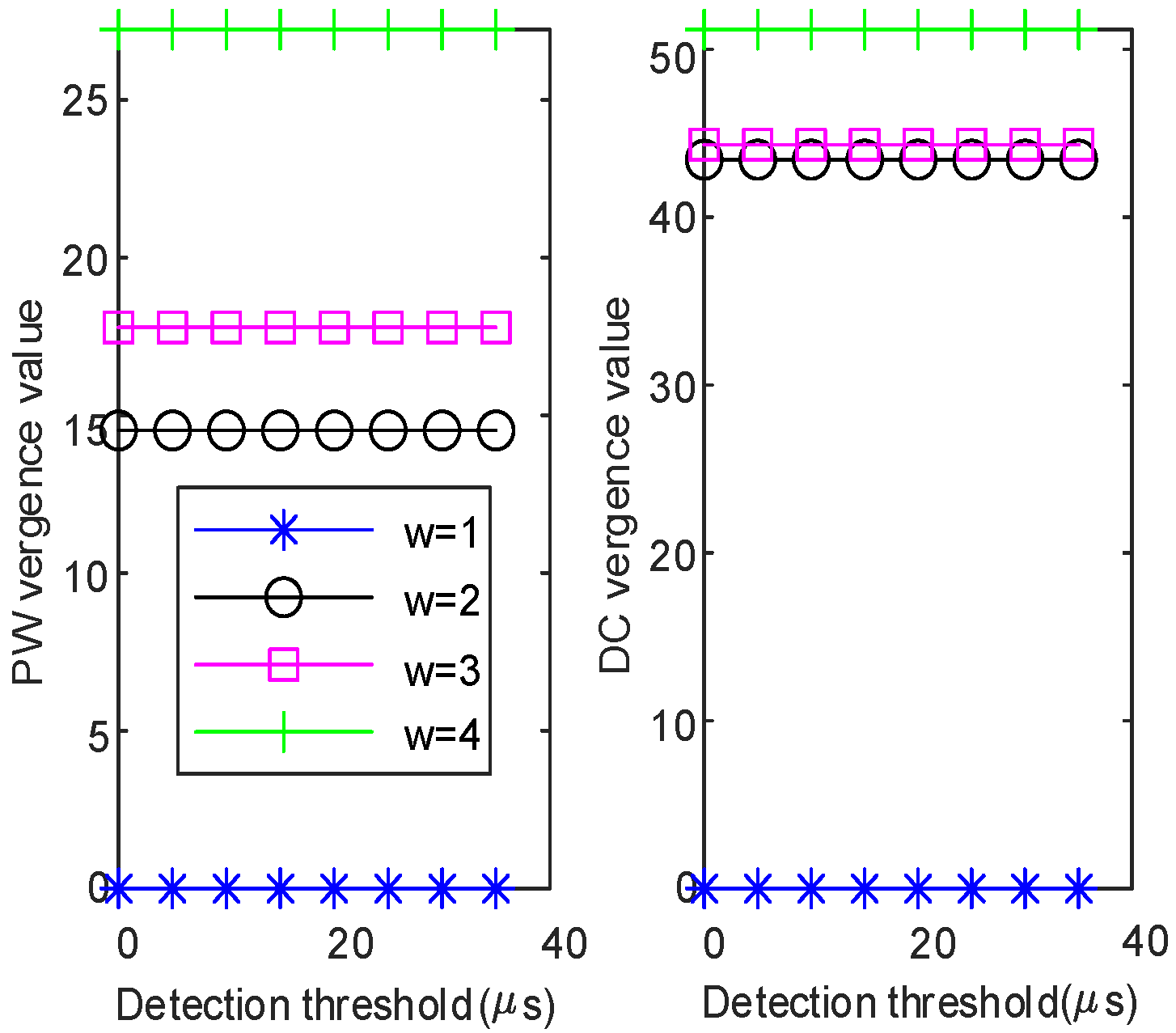
4.3.1. Window Length
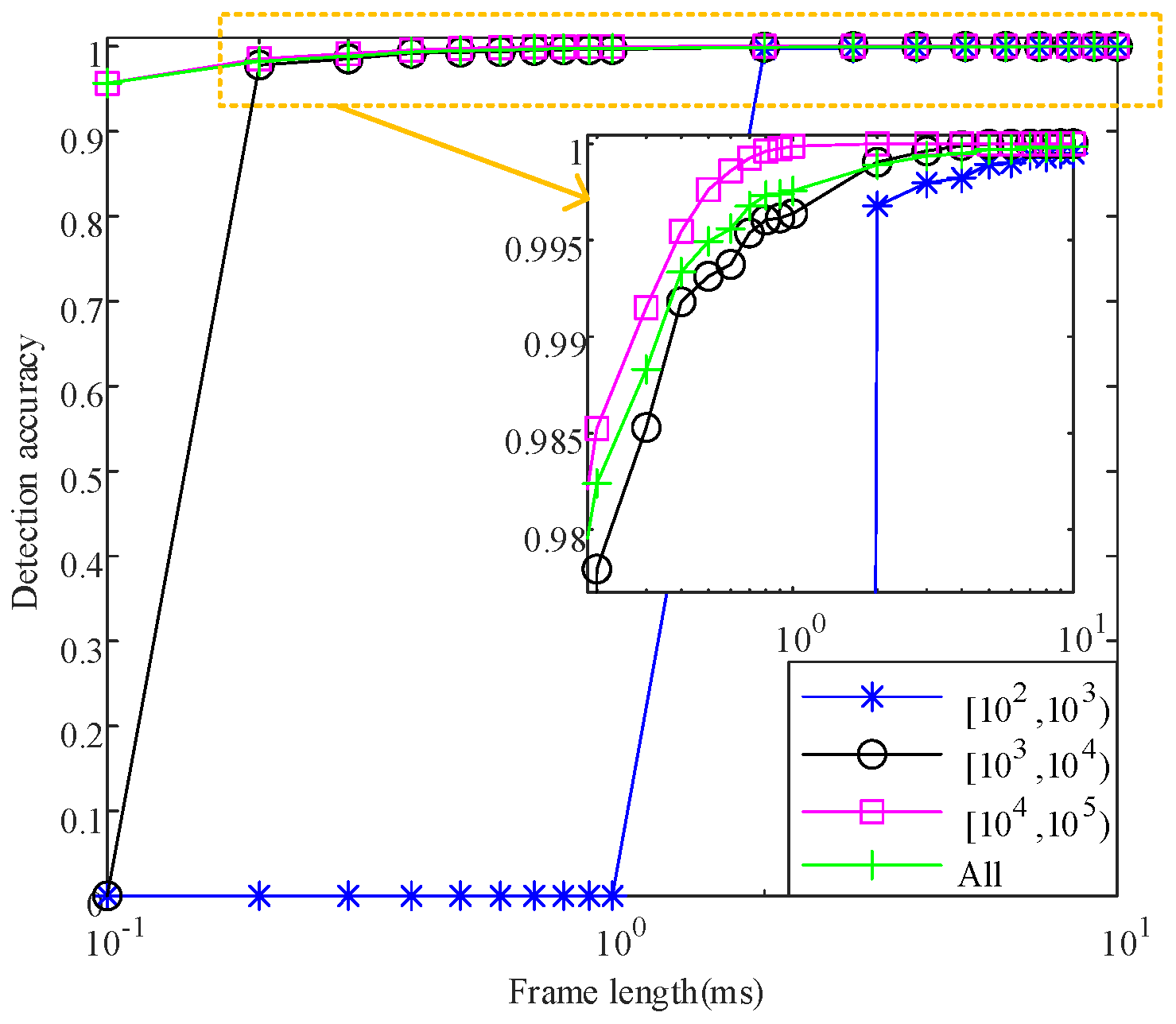
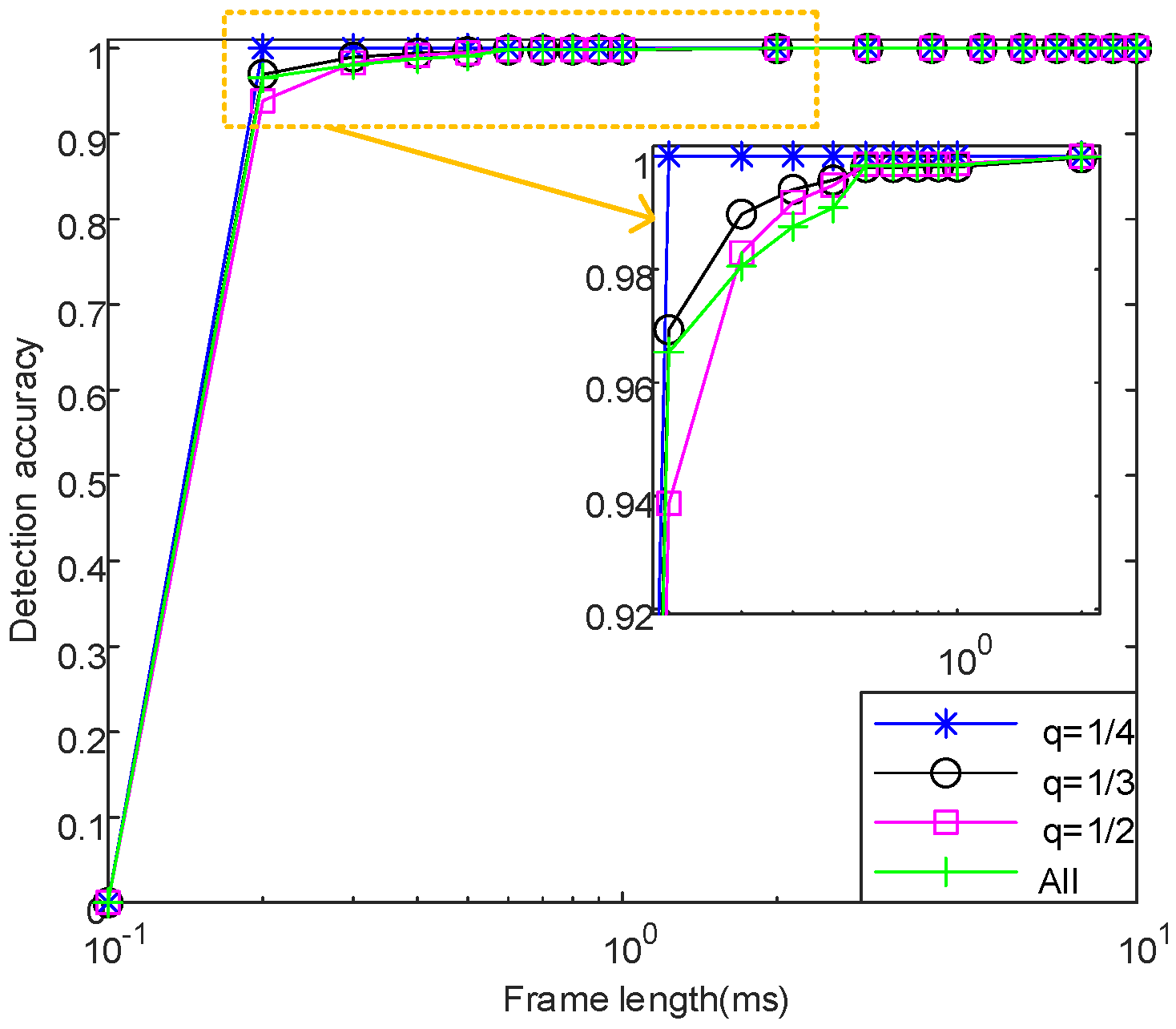
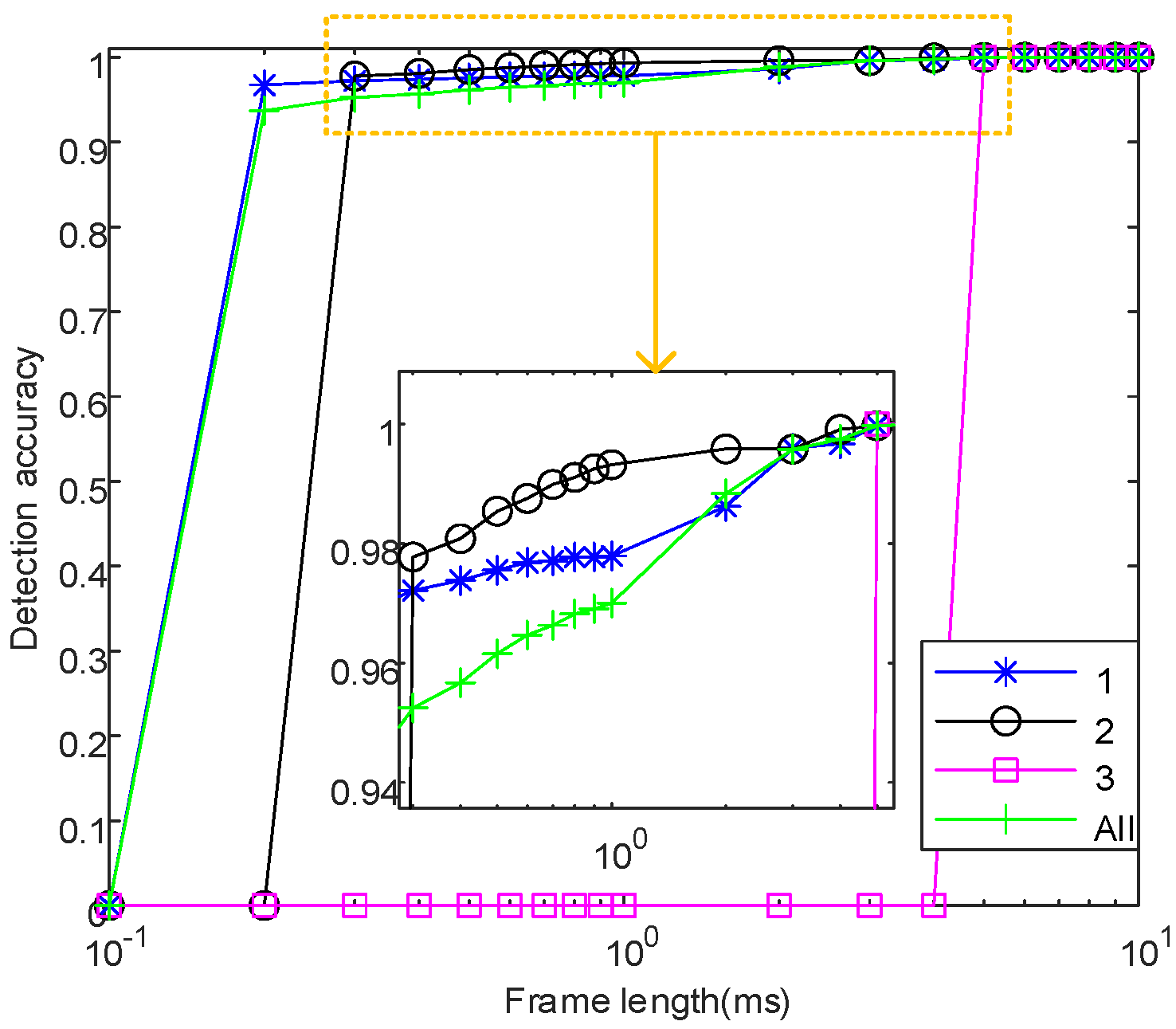
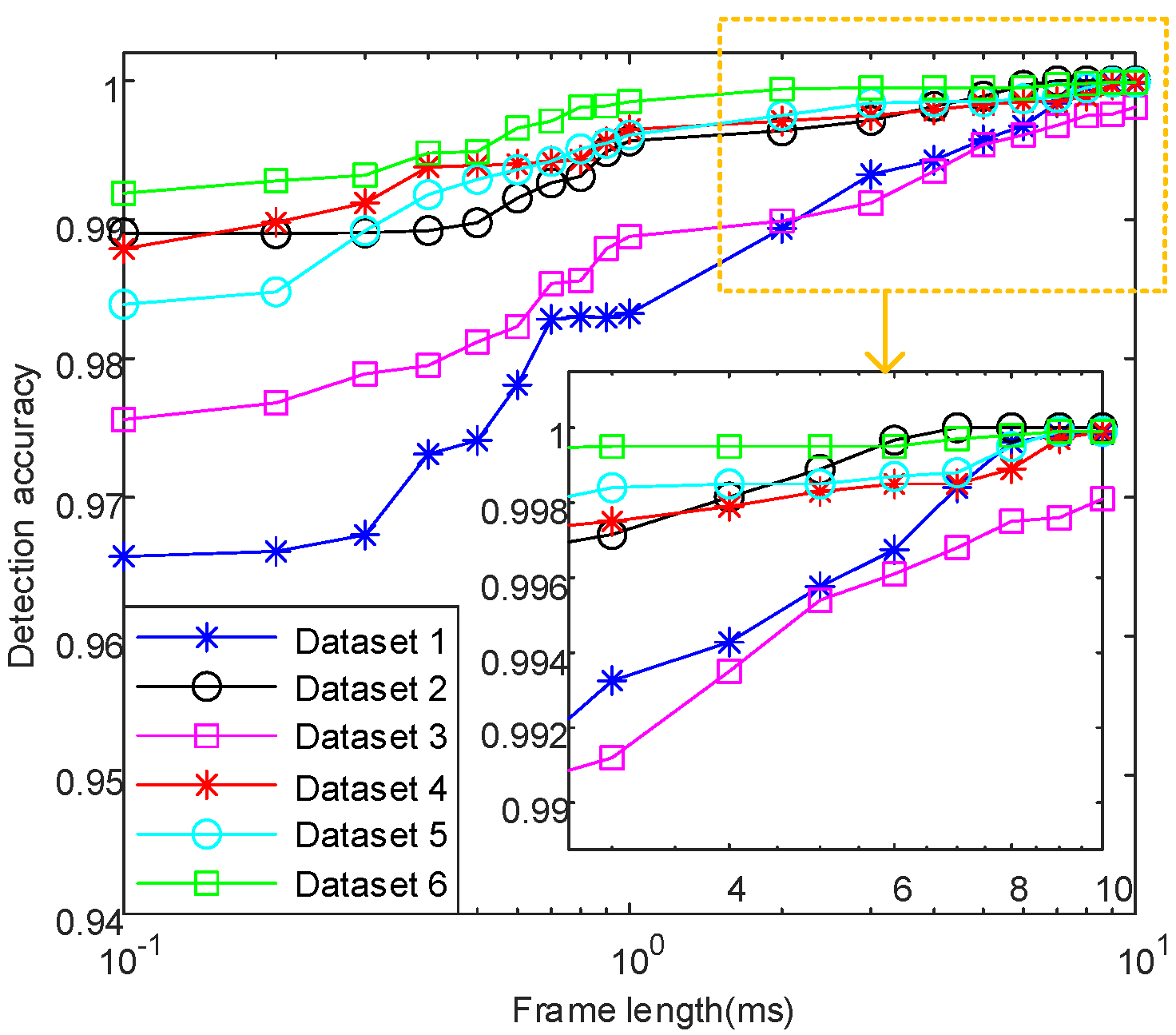
4.3.2. Frame Length
4.3.3. Split Pulse Detection Threshold
5. Conclusions
- Under a significance level of 0.05, it was verified that the split pulse number of the selected measured radar pulse stream follows a geometric distribution.
- When the window length is greater than 1, the defined time-domain convergence degree is effective and can produce valid results for split pulse detection.
- Keeping other conditions constant, when only the pulse flow density varies, a higher pulse flow density leads to a higher detection accuracy. As the frame length increases, the detection accuracy gradually increases and exceeds 99.9%, remaining stable thereafter.
- 4.
- Using the detection algorithm for both simulation and experimental data, the obtained detection accuracy remains above 95.68%, confirming the accuracy and stability of the empirical formula for split pulse detection threshold.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dandan, D. Research on Signal Detection and Sorting Technology in Passive Detection Equipment. Master’s Thesis, Harbin Engineering University, Harbin, China, 2018. [Google Scholar]
- Li, C.; Wang, W.; Wang, X.-S. Pulse Detection Algorithm based on box Differential Filter. Syst. Eng. Electron. 2013, 35, 1615. [Google Scholar]
- D’amico, A.A.; Mengali, U.; Taponecco, L. Energy-Based TOA Estimation. IEEE Trans. Wirel. Commun. 2008, 7, 838–847. [Google Scholar] [CrossRef]
- Xi, Y.; Liu, Y.; Jing, S. Real-time detection algorithm and performance analysis of electronic reconnaissance signal. J. Nanjing Univ. Aeronaut. Astronaut. 2001, 3, 277–281. [Google Scholar]
- Simin, Z.; Deguo, Z.; Bin, T. A wideband pulse detection algorithm based on autocorrelation. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 4-287–4-289. [Google Scholar] [CrossRef]
- Liu, X.; Fan, X.; Su, S. Adaptive pulse edge detection algorithm based on short-time Fourier transforms and difference of box filter. J. Appl. Remote. Sens. 2019, 13, 024502. [Google Scholar] [CrossRef]
- Luo, W. Pulse Signal Detection Method Based on Double Extended Duffing Oscillator. J. Syst. Simul. 2019, 31, 1416–1420. [Google Scholar] [CrossRef]
- Cao, C.; Yu, Y. Analysis of influencing factors of Pulse Detection. Electron. Inf. Countermeas. Technol. 2020, 35, 46. [Google Scholar]
- Gong, S.X.; Wei, X.Z.; Li, X. Review of Wideband Digital Channelized Receivers. Acta Electron. Sin. 2013, 41, 949. [Google Scholar]
- Li, Q.J. On the Impedance Mismatch Channel Model of G.fast Digital Subscriber Line. Acta Electron. Sin. 2020, 48, 403. [Google Scholar]
- Jiang, L.B.; Zhou, X.L.; Che, L. Few-Shot Learning for Human Motion Recognition Based on Carrier-Free UWB Radar. Acta Electron. Sin. 2020, 48, 602. [Google Scholar]
- Zou, G. Design and Implementation of Ultra Wideband Radar Signal Reconnaissance and Acquisition Processor. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2015. [Google Scholar]
- Liu, Y. Signal Parameter Measurement Method and DSP Software Implementation of Spaceborne Ultra-Wideband Radar. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Jiang, H.; Guo, Y.; Zhao, F. Split pulse combination in UWB radar signal reconnaissance system. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Tang, L. Channeled Wideband Radar Signal Detection and FPGA Implementation. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2022. [Google Scholar]
- Wang, C.; Sun, L.; Wang, X. Based on radar intra-pulse chirp pulse splitting signal separation and parameter estimation. J. Signal Process. 2023, 39, 1222. [Google Scholar] [CrossRef]
- Wu, Z.; Xia, H. Research on the false signal processing method caused by channelization. Technol. Electron. 2021, 34, 25–30. [Google Scholar] [CrossRef]
- Gui, Y.; Wang, B. Research on digital channelization and false signal. Mod. Radar 2016, 38, 23–27. [Google Scholar] [CrossRef]
- Cirrone, G.; Donadio, S.; Guatelli, S.; Mantero, A.; Mascialino, B.; Parlati, S.; Pia, M.; Pfeiffer, A.; Ribon, A.; Viarengo, P. A goodness-of-fit statistical toolkit. IEEE Trans. Nucl. Sci. 2004, 51, 2056–2063. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Existing Radar Pulse-Splitting Methods | Advantages | Disadvantages |
|---|---|---|
| [2,3,4,5,6,7] | They have studied radar pulse detection algorithms. | They have not studied radar pulse-splitting detection algorithms. |
| [17,18] | They have conducted mechanistic studies on the three scenarios of pulse splitting. | They have not mathematically modeled the phenomenon of pulse splitting. |
| [12,13,14,15] | They have described the merging conditions and methods of split pulses. | They have not studied the statistical regularities of split pulse numbers. |
| [16] | The proposed pulse splitting model only considers mutually independent split pulses. | The model does not consider other splitting scenarios, and there has been no investigation into the statistical regularities of split pulse numbers. |
| p | 1/5 | 1/4 | 1/3 | 1/2 | 2/3 | 3/4 | 4/5 |
|---|---|---|---|---|---|---|---|
| 33 | 26 | 20 | 12 | 8 | 7 | 6 |
| Timeframe Feature | Label |
|---|---|
| There exists at least one original PDW with a split pulse number greater than 1. | 1 |
| The split pulse number corresponding to the original PDW is at most 1. | 0 |
| No pulse is received. | −1 |
| The Convergence Derivative Matrices and | Label |
|---|---|
| All zero matrices | 0 |
| Not all zero matrices | 1 |
| No pulse is received | −1 |
| Radar Number | f/MHz | /s | /dB | /s | |
|---|---|---|---|---|---|
| A | 20 ± 0.1 | 60 ± 0.1 | |||
| B | 15 ± 0.1 | 350 ± 0.2 | |||
| C | 30 ± 0.1 | 2008 ± 0.3 | |||
| D | 6 ± 0.1 | 543 ± 0.2 | |||
| E | 14 ± 0.1 | 250 ± 0.2 | |||
| F | 29 ± 0.1 | 1850 ± 0.3 | |||
| G | 79 ± 0.1 | 2890 ± 0.3 | |||
| H (fixed PRI) | 79 ± 0.1 | 2890 ± 0.3 | |||
| I (staggered PRI) | Pulse 1 | 15 ± 0.1 | 1947 ± 0.3 | ||
| Pulse 2 | 40 ± 0.1 | 454 ± 0.2 | |||
| J (group staggered PRI) | Pulse 3 | 11 ± 0.1 | 511 ± 0.2 | ||
| Pulses 4,5 | 31 ± 0.1 | 1007 ± 0.3 | |||
| Pulses 6,7 | 63 ± 0.1 | 1040 ± 0.3 | |||
| Pulse 8 | 127 ± 0.1 | 2063 ± 0.3 | |||
| L (staggered PRI, q = 1/3) | Pulse 9 | 26 ± 0.1 | 600 ± 0.2 | ||
| Pulse 10 | 32 ± 0.1 | 960 ± 0.2 | |||
| Pulse 11 | 26 ± 0.1 | 1550 ± 0.3 | |||
| M (group staggered PRI, q = 1/2) | Pulse 12,13 | 17 ± 0.1 | 530 ± 0.2 | ||
| Pulses 14,15,16 | 22 ± 0.1 | 850 ± 0.2 | |||
| Pulses 17 | 55 ± 0.1 | 1350 ± 0.3 | |||
| Dataset Number | f/MHz | /s | /dB | /s |
|---|---|---|---|---|
| 1 (fixed PRI) | 1 ± 0.1 | 100 ± 0.2 | ||
| 2 (fixed PRI) | 10 ± 0.1 | 150 ± 0.2 | ||
| 3 (staggered PRI) | 13 ± 0.1 | (50, 300) ± 0.2 | ||
| 4 (staggered PRI) | 15 ± 0.1 | (100, 400) ± 0.2 | ||
| 5 (group staggered PRI) | 22 ± 0.1 | (60,60,110,110,160) ± 0.2 | ||
| 6 (group staggered PRI) | 35 ± 0.1 | (70,70,115,115,130) ± 0.2 | ||
| 7 (fixed PRI) | 50 ± 0.1 | 500 ± 0.2 | ||
| 8 (fixed PRI) | 200 ± 0.1 | 1000 ± 0.2 |
| i | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 219028 | 60096 | 28242 | 21893 | 14209 | |
| 60.72% | 16.66% | 7.83% | 6.07% | 3.94% | |
| 6 | 7 | 8 | 9 | 10 | |
| 8010 | 3907 | 1962 | 1023 | 672 | |
| 2.22% | 1.08% | 0.54% | 0.28% | 0.19% | |
| 11 | 12 | 13 | 14 | 15 | |
| 518 | 391 | 303 | 243 | 237 | |
| 0.14% | 0.11% | 0.08% | 0.07% | 0.07% |
| Pulse Flow Characteristic | Pulse Flow Density | |||
|---|---|---|---|---|
| Experiment condition | All | |||
| 99.86% | 100% | 100% | 99.96% | |
| 100% | 100% | 100% | 100% | |
| 99.5% | 99.87% | 99.82% | 99.85% | |
| 0.5% | 0.13% | 0.18% | 0.15% | |
| Pulse flow characteristic | Pulse splitting degree | |||
| Experiment condition | All | |||
| 100% | 100% | 100% | 100% | |
| 100% | 100% | 100% | 100% | |
| 100% | 100% | 100% | 100% | |
| 0% | 0% | 0% | 0% | |
| Pulse flow characteristic | Pulse staggering degree | |||
| Experiment condition | All | |||
| 100% | 100% | 100% | 100% | |
| 100% | 100% | 100% | 100% | |
| 100% | 100% | 100% | 100% | |
| 0% | 0% | 0% | 0% | |
| Pulse flow characteristic | PRI modulation complexity | |||
| Experiment condition | Fixed PRI | Staggered PRI | Group staggered PRI | All |
| 99.55% | 99.8% | 99.84% | 99.73% | |
| 100% | 100% | 100% | 100% | |
| 96.98% | 98.59% | 99.12% | 98.83% | |
| 3.02% | 1.41% | 0.88% | 1.17% | |
| Pulse flow characteristic | Comprehensive characteristics | |||
| 99.61% | ||||
| 99.96% | ||||
| 95.55% | ||||
| 4.41% | ||||
| Dataset Number | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| p | 95.68% | 99.54% | 98.11% | 98.98% | 98.81% | 99.48% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, R.; Dong, Y.-Y.; Zhang, L.; Dong, C.; Bao, D.; Li, W.; Li, Z. Radar Reconnaissance Pulse-Splitting Modeling and Detection Method. Remote Sens. 2024, 16, 521. https://doi.org/10.3390/rs16030521
Guo R, Dong Y-Y, Zhang L, Dong C, Bao D, Li W, Li Z. Radar Reconnaissance Pulse-Splitting Modeling and Detection Method. Remote Sensing. 2024; 16(3):521. https://doi.org/10.3390/rs16030521
Chicago/Turabian StyleGuo, Ronghua, Yang-Yang Dong, Lidong Zhang, Chunxi Dong, Dan Bao, Wenbo Li, and Zhiyuan Li. 2024. "Radar Reconnaissance Pulse-Splitting Modeling and Detection Method" Remote Sensing 16, no. 3: 521. https://doi.org/10.3390/rs16030521
APA StyleGuo, R., Dong, Y.-Y., Zhang, L., Dong, C., Bao, D., Li, W., & Li, Z. (2024). Radar Reconnaissance Pulse-Splitting Modeling and Detection Method. Remote Sensing, 16(3), 521. https://doi.org/10.3390/rs16030521