

Machine Learning Algorithms for Acid Mine Drainage Mapping Using Sentinel-2 and Worldview-3



Abstract
1. Introduction
- Integration of multispectral and high-resolution imagery: We effectively combined Sentinel-2 multispectral imagery with high-resolution WorldView-3 imagery, demonstrating that this integration improves the accuracy of detecting AMD-affected areas.
- Comprehensive dataset preparation: We generated a comprehensive dataset by combining data from three AMD-affected lakes and one clean lake.
- Application of multiple ML algorithms: We applied and evaluated three widely used ML techniques for both classification (AMD vs. non-AMD) and regression (pH mapping) tasks, providing a comprehensive analysis of model performance.
- Dual-level labeling and augmentation: Our dataset incorporated dual-level labels for classification and regression. The augmentation process, informed by geological experts, ensured consistency in the characteristics of the augmented samples.
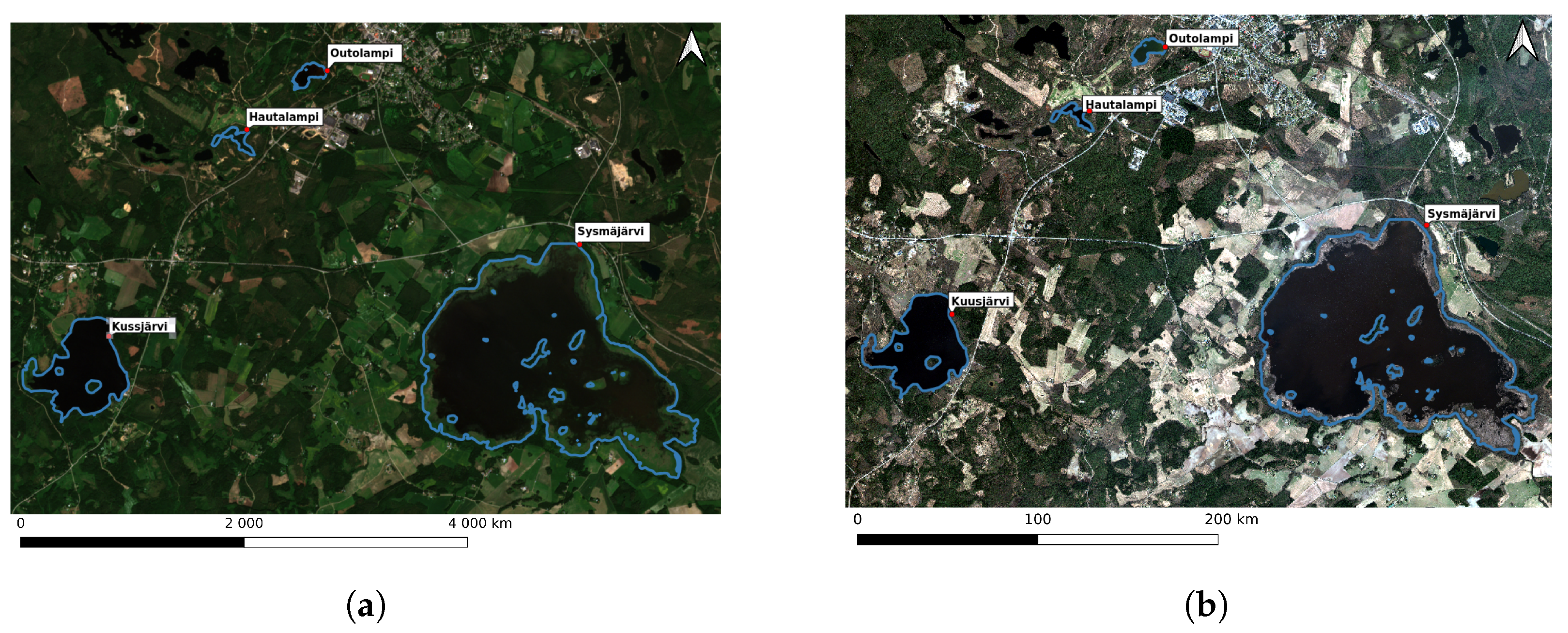
- Experiments from three AMD lakes: We conducted our experiments by evaluating ML algorithms on three AMD-affected lakes in a historical mining area in Outokumpu, Finland.
2. Research Area and Datasets
2.1. Water Samples
2.2. Satellite Imagery
2.2.1. Sentinel-2
2.2.2. Worldview-3
2.3. Dataset Description
- Classification (AMD detection): We tackled the classification problem of identifying AMD-affected areas using multispectral imagery from Sentinel-2 and high-resolution imagery from WorldView-3. The classification task aims to label each pixel as either AMD-affected or non-AMD-affected.
- Regression (quantitative pH mapping): The regression problem involves predicting and visualizing the pH values of water bodies using the same set of remote sensing features (bands).
3. Methods
3.1. Data Augmentation
3.2. Machine Learning Methods
3.2.1. K-Nearest Neighbors
3.2.2. Random Forest
3.2.3. Multilayer Perceptron
3.3. Cross-Validation
4. Results
4.1. Classification Results (AMD vs. Non-AMD)
4.1.1. Performance Metrics
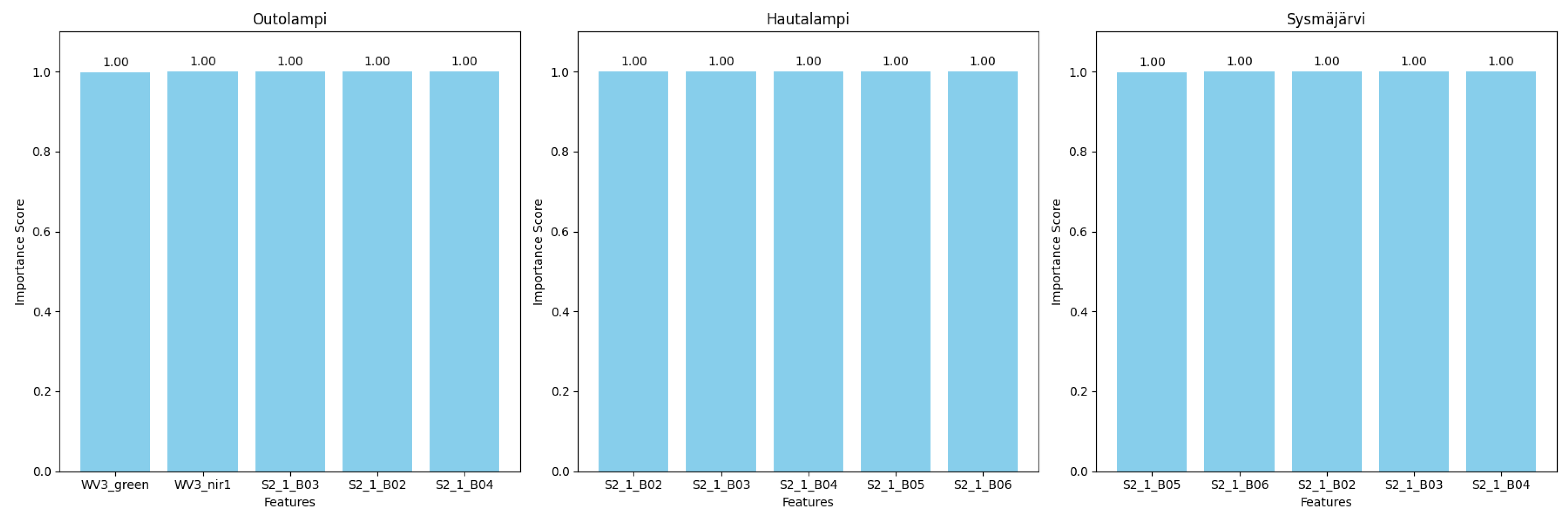
4.1.2. Feature Importance
4.1.3. AMD Classification Maps
4.2. Regression (Quantitative pH Mapping)
4.2.1. Performance Metrics
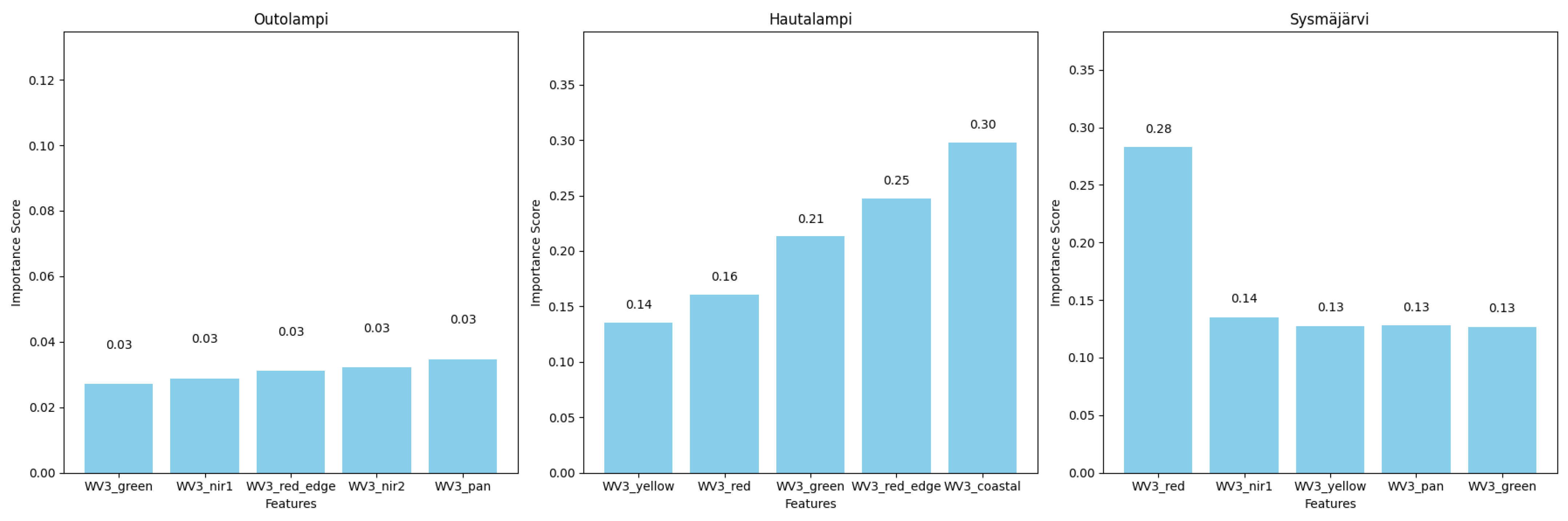
4.2.2. Feature Importance
4.2.3. Residual Plot
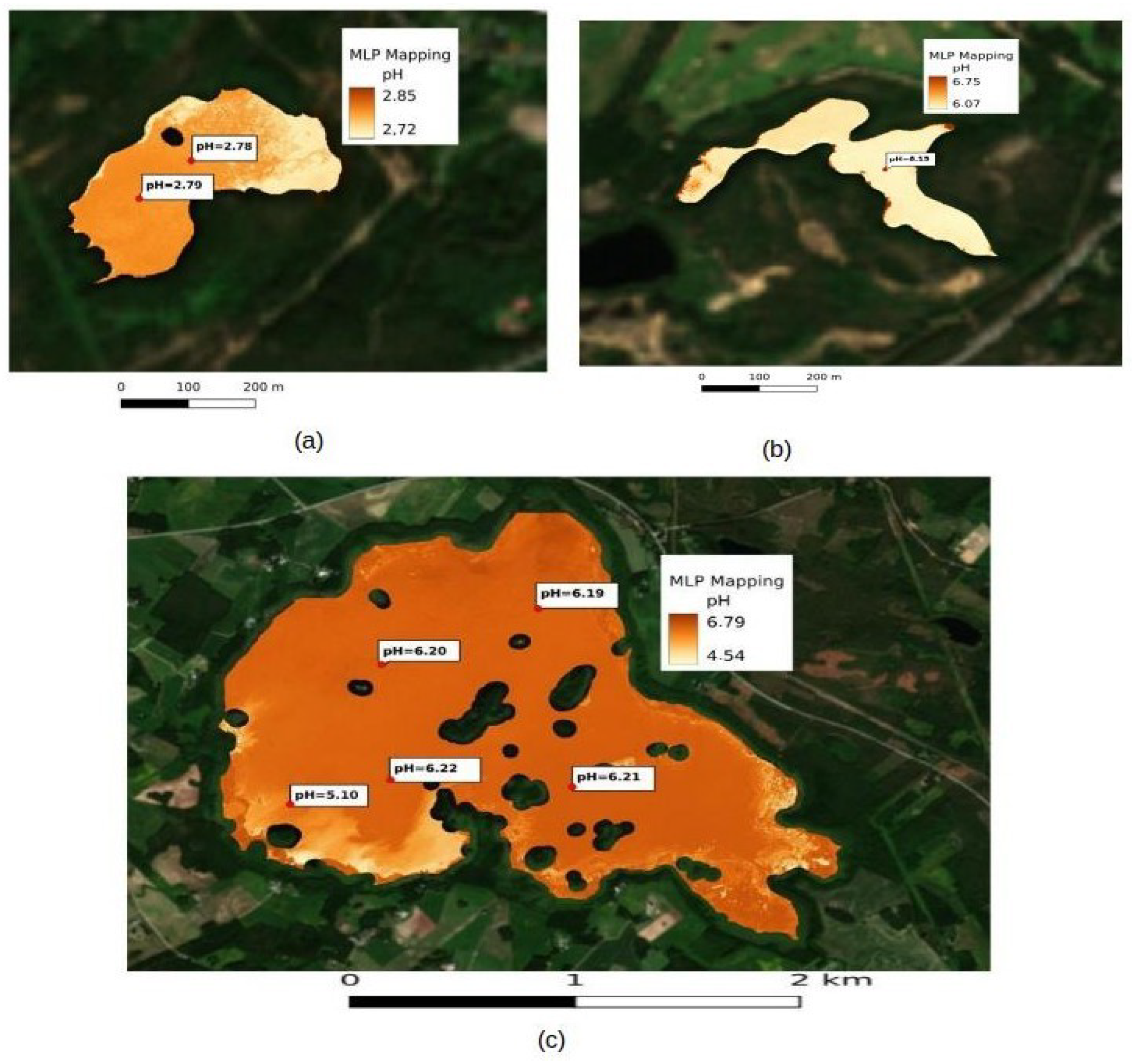
4.2.4. pH Prediction Maps
4.3. Multi-Modal vs. Uni-Modal
- The multimodal framework (Sentinel-2+WV3) consistently outperformed the unimodal frameworks across all lakes for both regression and classification tasks. The MLP classifier achieved the highest accuracy (97.79%) when both data sources were combined. For regression tasks, the multimodal framework also demonstrated superior performance, particularly for Hautalampi, with an RMSE of 0.10.
- The framework based on WV3 data alone outperformed the Sentinel-2-based framework for all lakes, highlighting the value of WV3’s higher spatial resolution in improving model performance.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Singer, P.; Stumm, W. Acidic mine drainage: The rate-determining step. Science 1970, 167, 1121–1123. [Google Scholar] [CrossRef] [PubMed]
- Ong, C.C.H.; Cudahy, T.J. Mapping Contaminated Soils: Using Remotely-Sensed Hyperspectral Data to Predict pH. Eur. J. Soil Sci. 2014, 65, 897–906. [Google Scholar] [CrossRef]
- Williams, D.J.; Bigham, J.M.; Cravotta, C.A., III; Traina, S.J.; Anderson, J.E.; Lyon, J.G. Assessing mine drainage pH from the color and spectral reflectance of chemical precipitates. Appl. Geochem. 2002, 17, 1273–1286. [Google Scholar] [CrossRef]
- Frau, F.; Medas, D.; Da Pelo, S.; Wanty, R.; Cidu, R. Environmental Effects on the Aquatic System and Metal Discharge to the Mediterranean Sea from a Near-Neutral Zinc-Ferrous Sulfate Mine Drainage. Water Air Soil Pollut. 2015, 226, 55. [Google Scholar] [CrossRef]
- Sánchez-España, J. Acid Mine Drainage in the Iberian Pyrite Belt: An Overview with Special Emphasis on Generation Mechanisms, Aqueous Composition and Associated Mineral Phases. Macla 2008, 10, 34–43. [Google Scholar]
- Seifi, A.; Hosseinjanizadeh, M.; Ranjbar, H.; Honarmand, M. Identification of Acid Mine Drainage Potential Using Sentinel 2a Imagery and Field Data. Mine Water Environ. 2019, 38, 707–717. [Google Scholar] [CrossRef]
- Riaza, A.; Buzzi, J.; García-Meléndez, E.; Carrère, V.; Sarmiento, A.; Müller, A. Monitoring acidic water in a polluted river with hyperspectral remote sensing (HyMap). Hydrol. Sci. J. 2015, 60, 1064–1077. [Google Scholar] [CrossRef]
- Isgro, M.; Basallote, M.; Caballero, I.; Barbero, L. Comparison of UAS and Sentinel-2 Multispectral Imagery for Water Quality Monitoring: A Case Study for Acid Mine Drainage Affected Areas (SW Spain). Remote Sens. 2022, 14, 4053. [Google Scholar] [CrossRef]
- Hanelli, D.; Barth, A.; Volkmer, G.; Köhler, M. Modelling of Acid Mine Drainage in Open Pit Lakes Using Sentinel-2 Time-Series: A Case Study from Lusatia, Germany. Minerals 2023, 13, 271. [Google Scholar] [CrossRef]
- Kopačková, V. Mapping Acid Mine Drainage (AMD) and Acid Sulfate Soils Using Sentinel-2 Data. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5682–5685. [Google Scholar] [CrossRef]
- Rendana, M.; Idris, W.; Abd Rahim, S. Mapping Chini Lake (Pahang, Malaysia) using Sentinel-2 images to determine the effect of acid mine drainage in the pre- to post-COVID-19 restriction period. Environ. Monit. Assess. 2022, 195, 205. [Google Scholar] [CrossRef] [PubMed]
- Farahnakian, F.; Heikkonen, J. Deep Learning Based Multi-Modal Fusion Architectures for Maritime Vessel Detection. Remote Sens. 2020, 12, 2509. [Google Scholar] [CrossRef]
- Sanliyuksel Yucel, D.; Yucel, M.; Baba, A. Change detection and visualization of acid mine lakes using time series satellite image data in geographic information systems (GIS): Can (Canakkale) County, NW Turkey. Environ. Earth Sci. 2014, 72, 4311–4323. [Google Scholar] [CrossRef]
- Pascucci, S.; Pignatti, S.; Belviso, C.; Cavalcante, F.; Bogliolo, M. Worldview-3 and Sentinel-2 Imagery for Mapping Naturally Occurring Asbestos (NOA) in Serpentinites Rocks in Southern Italy. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 6756–6759. [Google Scholar] [CrossRef]
- Honglyun, P.; Kim, N.; Park, S.; Choi, J. Sharpening of Worldview-3 Satellite Images by Generating Optimal High-Spatial-Resolution Images. Appl. Sci. 2020, 10, 7313. [Google Scholar] [CrossRef]
- Farahnakian, F.; Zelioli, L.; Middleton, M.; Seppä, I.; Pitkänen, T.; Heikkonen, J. CNN-based Boreal Peatland Fertility Classification from Sentinel-1 and Sentinel-2 Imagery. In Proceedings of the 2023 IEEE International Symposium on Robotic and Sensors Environments (ROSE), Tokyo, Japan, 6–7 November 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Farahnakian, F.; Zelioli, L.; Pitkänen, T.; Pohjankukka, J.; Middleton, M.; Tuominen, S.; Nevalainen, P.; Heikkonen, J. Multistream Convolutional Neural Network Fusion for Pixel-wise Classification of Peatland. In Proceedings of the 2023 26th International Conference on Information Fusion (FUSION), Charleston, SC, USA, 27–30 June 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Farahnakian, F.; Torppa, J.; Luodes, N.; Panttila, H.; Karlsson, T. A Comparative Study of Machine Learning Models for Pixel-Wise Acid Mine Drainage Classification Using Sentinel-2. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 2127–2131. [Google Scholar] [CrossRef]
- Nogueira, P.; Silva, M.; Roseiro, J.; Potes, M.; Rodrigues, G. Mapping the Mine: Combining Portable X-ray Fluorescence, Spectroradiometry, UAV, and Sentinel-2 Images to Identify Contaminated Soils—Application to the Mostardeira Mine (Portugal). Remote Sens. 2023, 15, 5295. [Google Scholar] [CrossRef]
- Flores, H.; Lorenz, S.; Jackisch, R.; Tusa, L.; Contreras, I.C.; Zimmermann, R.; Gloaguen, R. UAS-Based Hyperspectral Environmental Monitoring of Acid Mine Drainage Affected Waters. Minerals 2021, 11, 182. [Google Scholar] [CrossRef]
- Teru, K.K. On Data Augmentation and Consistency-based Semi-supervised Relation Extraction. In Proceedings of the First Workshop on Interpolation Regularizers and Beyond at NeurIPS 2022, New Orleans, LA, USA, 29 July–6 October 2022. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Bishop, C. Neural Networks for Pattern Recognition; Oxford University Press: New York, NY, USA, 1995. [Google Scholar]
- Tornivaara, A.; Turunen, K.; Lahtinen, T.; Heino, N.; Pasanen, A.; Reinikainen, J.; Jouttijärvi, T.; Häkkinen, J.; Karjalainen, N.; Viitasalo, M. Suljettujen ja hylättyjen kaivannaisjätealueiden kunnostustarpeen arviointi. 06 2020. Available online: https://julkaisut.valtioneuvosto.fi/handle/10024/162348 (accessed on 12 August 2024).
- Geological Survey of Finland. Old Mining Waste Areas Present a Persistent Environmental Hazard: How Can Research Help to Remediate Them and Assess Their Risks? Geological Survey of Finland: Espoo, Finland, 2024. [Google Scholar]
- Arlot, S.; Celisse, A. A survey of cross-validation procedures for model selection. Stat. Surv. 2010, 4, 40–79. [Google Scholar] [CrossRef]
- Drobnič, F.; Kos, A.; Pustišek, M. On the Interpretability of Machine Learning Models and Experimental Feature Selection in Case of Multicollinear Data. Electronics 2020, 9, 761. [Google Scholar] [CrossRef]
- Pisanti, A.; Magrì, S.; Ferrando, I.; Federici, B. Sea water turbidity analysis from Sentinel-2 images: Atmospheric CORRECTION AND BANDS CORRELATION. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 371–378. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Band | Central Wavelength (nm) | Bandwidth (nm) | Spatial Resolution (m) |
|---|---|---|---|---|
| Sentinel-2 | B2-Blue | 490 | 65 | 10 |
| B3-Green | 560 | 35 | 10 | |
| B4-Red | 665 | 30 | 10 | |
| B5-Red Edge1 | 705 | 15 | 20 | |
| B6-Red Edge2 | 740 | 15 | 20 | |
| B7-Red Edge3 | 783 | 20 | 20 | |
| B8-NIR | 842 | 115 | 10 | |
| B8A-NIR | 865 | 20 | 20 | |
| B11-SWIR1 | 1610 | 90 | 20 | |
| B12-SWIR2 | 2190 | 180 | 20 | |
| WorldView-3 | Panchromatic | 470 | 100 | 0.4 |
| B1-Coastal | 400 | 20 | 1.6 | |
| B2-Blue | 450 | 50 | 1.6 | |
| B3-Green | 510 | 50 | 1.6 | |
| B4-Yellow | 580 | 50 | 1.6 | |
| B5-Red | 660 | 60 | 1.6 | |
| B6-Red Edge | 725 | 40 | 1.6 | |
| B7-NIR1 | 830 | 100 | 1.6 | |
| B8-NIR2 | 950 | 100 | 1.6 |
| Lake | Total Samples | Window Size | Number of AMD Samples | Window Size of Kussjärvi | Number of Non-AMD Samples |
|---|---|---|---|---|---|
| Sysmäjärvi | 38,000 | 96 m | 18,000 | 160 m | 20,000 |
| Outolampi | 4250 | 46 m | 1800 | 56 m | 2450 |
| Hautalampi | 4250 | 46 m | 1800 | 56 m | 2450 |
| Metric | Model | Sysmäjärvi | Outolampi | Hautalampi |
|---|---|---|---|---|
| Overall Accuracy (%) | MLP | 50.68 | 73.90 | 97.79 |
| KNNs | 46.33 | 57.03 | 74.82 | |
| RF | 48.20 | 70.31 | 76.45 | |
| Sensitivity (%) | MLP | 52.00 | 74.50 | 98.00 |
| KNNs | 46.00 | 57.00 | 75.00 | |
| RF | 49.00 | 71.00 | 77.00 | |
| Specificity (%) | MLP | 50.00 | 73.00 | 97.50 |
| KNNs | 46.00 | 57.50 | 74.50 | |
| RF | 48.00 | 69.50 | 76.00 | |
| F1-Score | MLP | 51.00 | 74.00 | 97.80 |
| KNNs | 46.10 | 57.10 | 74.90 | |
| RF | 48.50 | 70.70 | 76.20 |
| Lake | KNNs | MLP | RF |
|---|---|---|---|
| Sysmäjärvi | 0.30 | 0.25 | 0.26 |
| Outolampi | 0.32 | 0.27 | 0.30 |
| A. Hautalampi | 0.20 | 0.10 | 0.17 |
| Task | Lake | Input Source | Accuracy (Classification) % | RMSE (Regression) |
|---|---|---|---|---|
| Classification | Sysmäjärvi | S2 | 45.10 | - |
| WV3 | 45.69 | - | ||
| S2 + WV3 | 50.68 | - | ||
| Outolampi | S2 | 53.80 | - | |
| WV3 | 58.39 | - | ||
| S2 + WV3 | 73.90 | - | ||
| Hautalampi | Sentinel-2 | 73.05 | - | |
| WV3 | 75.78 | - | ||
| S2 + WV3 | 97.79 | - | ||
| Regression | Sysmäjärvi | S2 | - | 0.36 |
| WV3 | - | 0.29 | ||
| S2 + WV3 | - | 0.25 | ||
| Outolampi | S2 | - | 0.35 | |
| WV3 | - | 0.32 | ||
| S2 + WV3 | - | 0.27 | ||
| Hautalampi | S2 | - | 0.21 | |
| WV3 | - | 0.18 | ||
| S2 + WV3 | - | 0.10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farahnakian, F.; Luodes, N.; Karlsson, T. Machine Learning Algorithms for Acid Mine Drainage Mapping Using Sentinel-2 and Worldview-3. Remote Sens. 2024, 16, 4680. https://doi.org/10.3390/rs16244680
Farahnakian F, Luodes N, Karlsson T. Machine Learning Algorithms for Acid Mine Drainage Mapping Using Sentinel-2 and Worldview-3. Remote Sensing. 2024; 16(24):4680. https://doi.org/10.3390/rs16244680
Chicago/Turabian StyleFarahnakian, Fahimeh, Nike Luodes, and Teemu Karlsson. 2024. "Machine Learning Algorithms for Acid Mine Drainage Mapping Using Sentinel-2 and Worldview-3" Remote Sensing 16, no. 24: 4680. https://doi.org/10.3390/rs16244680
APA StyleFarahnakian, F., Luodes, N., & Karlsson, T. (2024). Machine Learning Algorithms for Acid Mine Drainage Mapping Using Sentinel-2 and Worldview-3. Remote Sensing, 16(24), 4680. https://doi.org/10.3390/rs16244680