
Intelligent QLFEKF Integrated Navigation for the SSBE Cruise Phase Based on X-Ray Pulsar/Solar and Target Planetary Doppler Information Fusion

 , , and
, , and 
Abstract
1. Introduction
2. System Models of Integrated Navigation
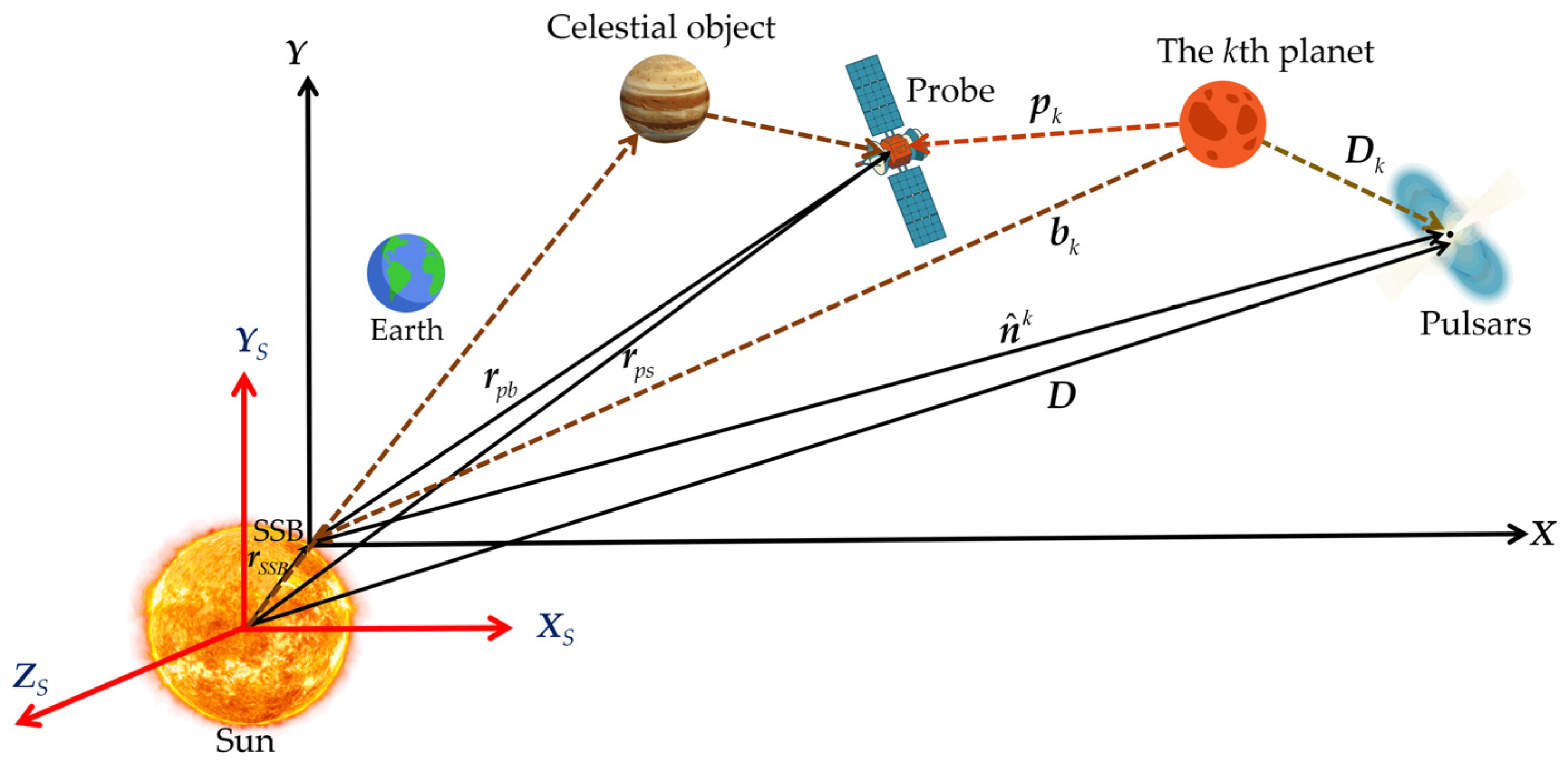
2.1. Integrated Navigation Dynamics Model
2.2. Integrated Navigation Measurement Model
2.2.1. Navigation Measurement Model Based on X-Ray Pulsar
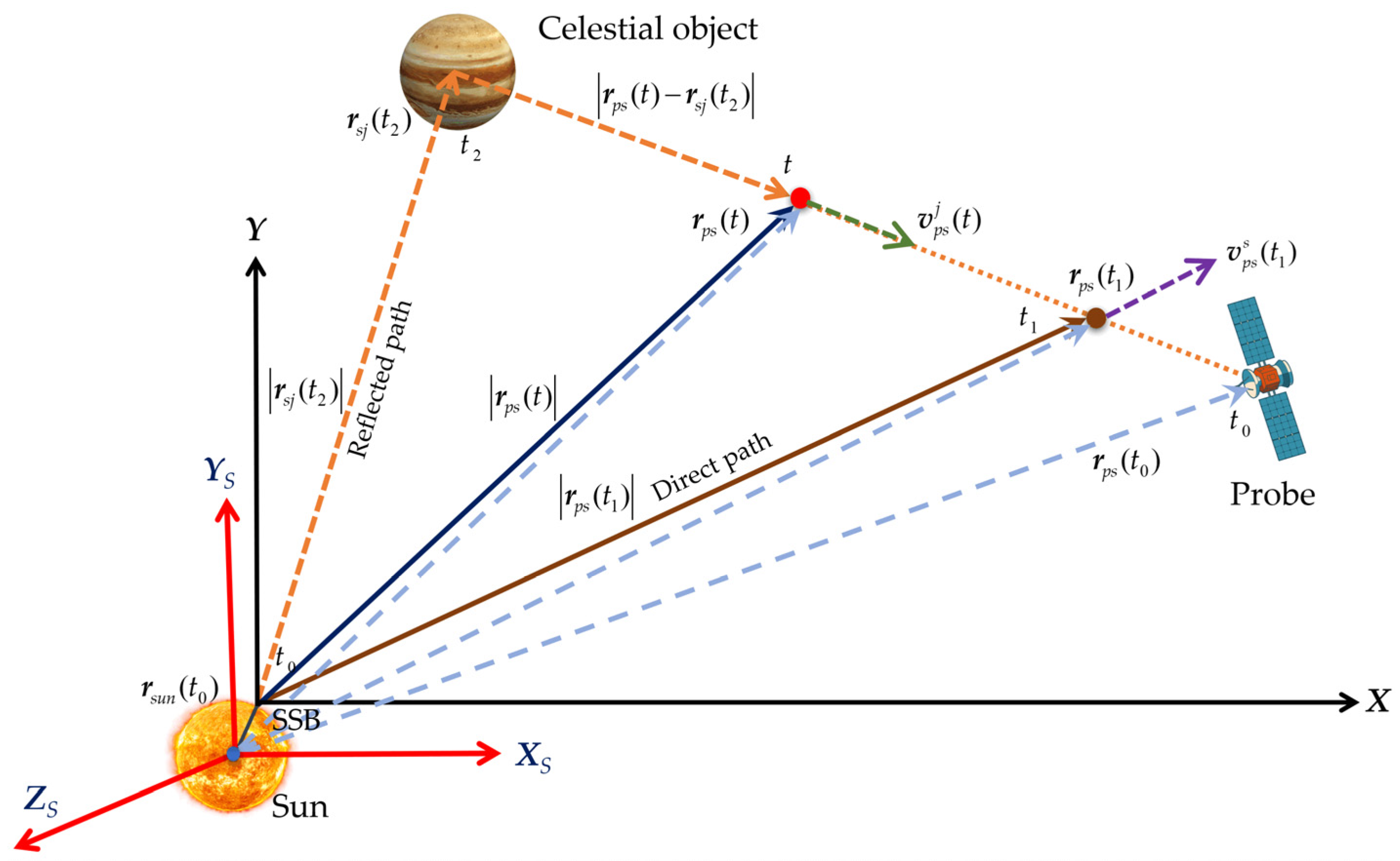
2.2.2. Navigation Measurements Model Based on Two-Dimensional Doppler Velocity
- (1)
- Solar Doppler radial velocity measurement
- (2)
- Target planetary object Doppler radial velocity measurement
3. Intelligent Integrated Navigation Q-Learning FEKF Algorithm
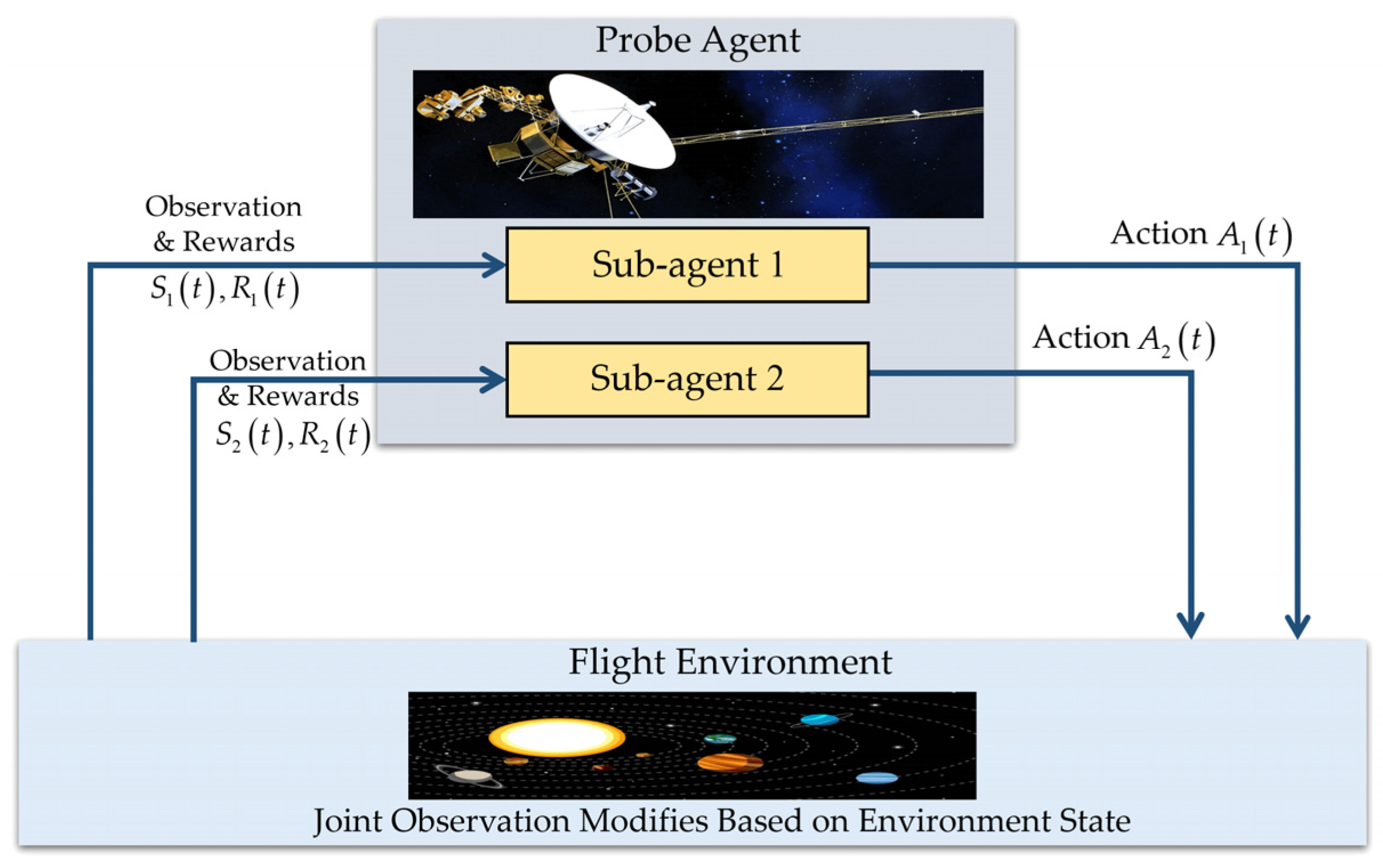
3.1. Navigation Information Fusion with the Q-Learning
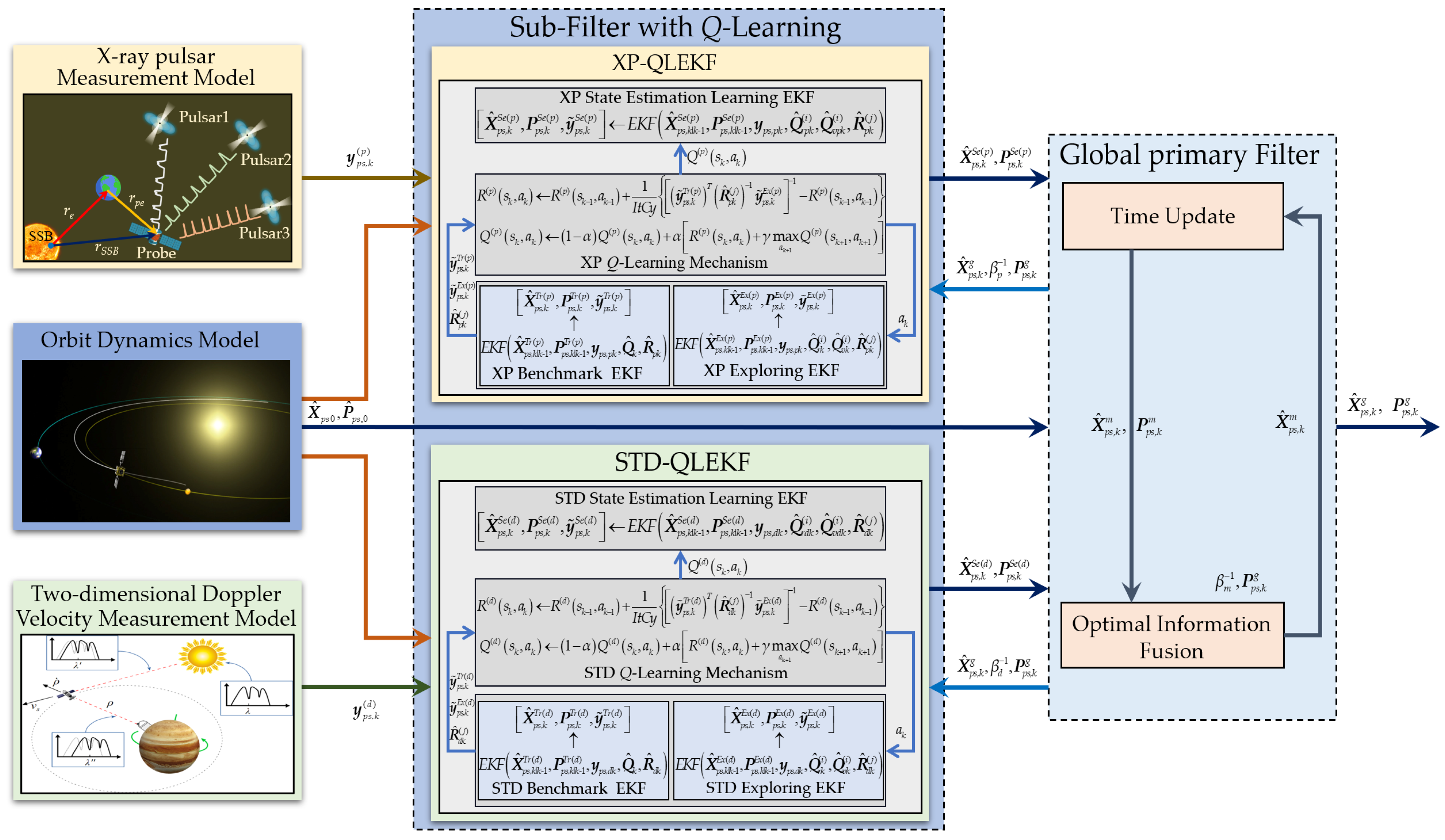
3.2. Design of the Q-Learning-Based FKF for Intelligent Integrated Navigation
| Algorithm 1: The Q-learning-based FEKF algorithm of the intelligent integrated navigation system | |
| Input: | Initial state estimation , error covariance matrix Pps,0, predetermined set of the noise covariance matrix error initial values , and learning parameter α, γ, ε |
| Step 1: | Initialize variables, |
| Step 2: | Time index initialization |
| Step 3: | For the specified time of the navigation |
| Step 4: | Set state and action, for all construct state sets , the action set |
| Step 5: | Environment state initialization , Q-value , and reward initialization |
| Step 6: | Set the initial noise error covariance matrix , and ; |
| Step 7: | Generated randomly the noise error covariance matrix , |
| Step 8: | ε-greedy strategy ak ← ε-greedy (sk, A, Q (sk, ak), ε) choose action ak for state sk |
| Step 9: | Execute action ak and observe arrived the next states |
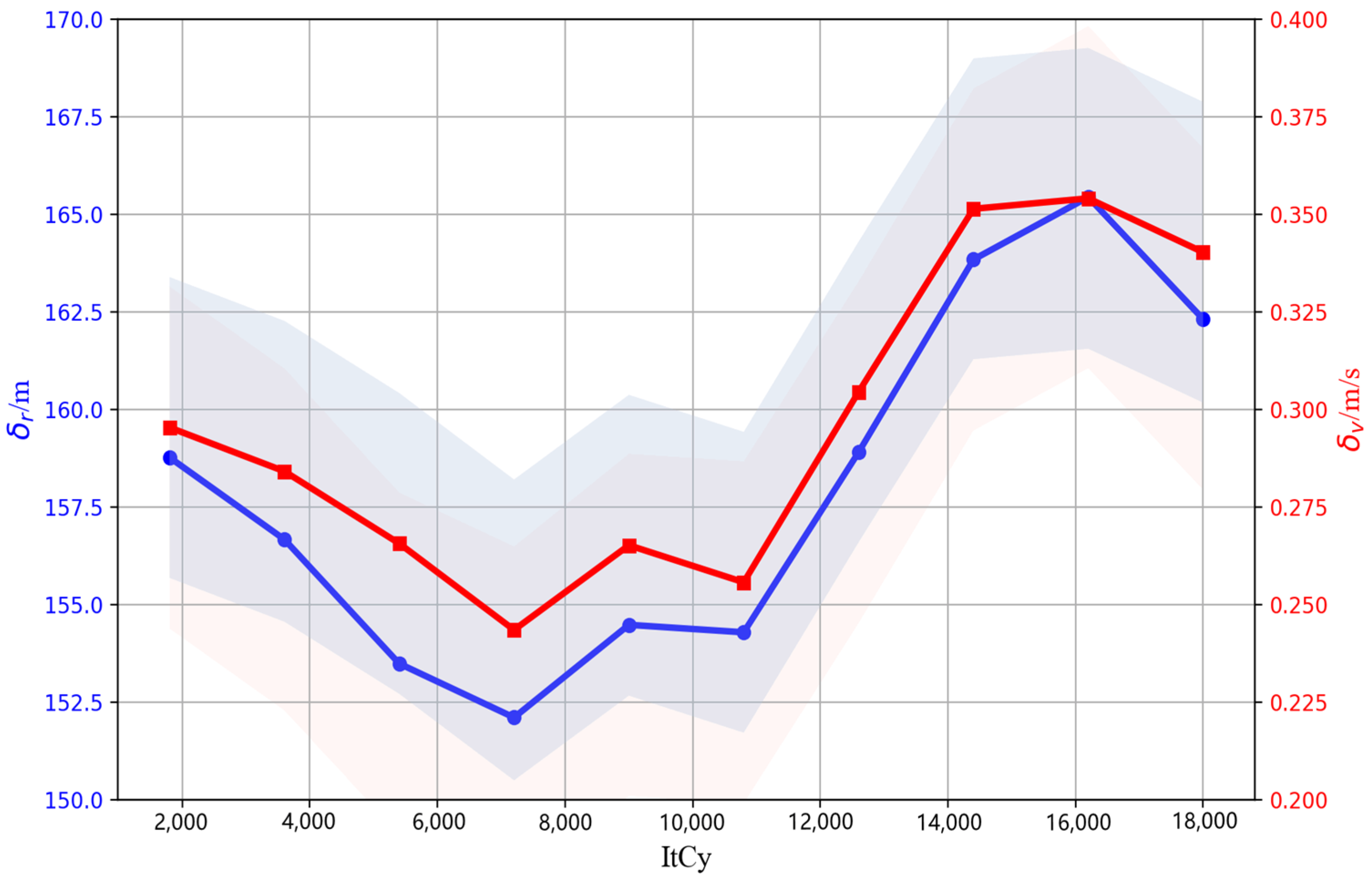
| Step 10: | For each time step ItCy = 1, 2, …, T in one iteration, do |
| Step 11: | k ← k + 1 |
| Step 12: | XP benchmark STD benchmark |
| Step 13: | and are determined according to the current state sk |
| Step 14: | XP searching STD searching |
| Step 15: | XP rewards STD rewards |
| Step 16: | Information distribution weight |
| Step 17: | Time update |
| Step 18: | XP measurement update STD measurement update |
| Step 19: | Information fusion |
| Step 20: | End for |
| Step 21: | XP Q-value STD Q-value |
| Step 22: | Set as the current state |
| Step 23: | Reset reward |
| Step 24: | Reset searching EKF |
| Step 25: | End for |
| Output: | Return as state estimate and |
4. Simulation and Results Analysis
4.1. Simulation Initial Conditions
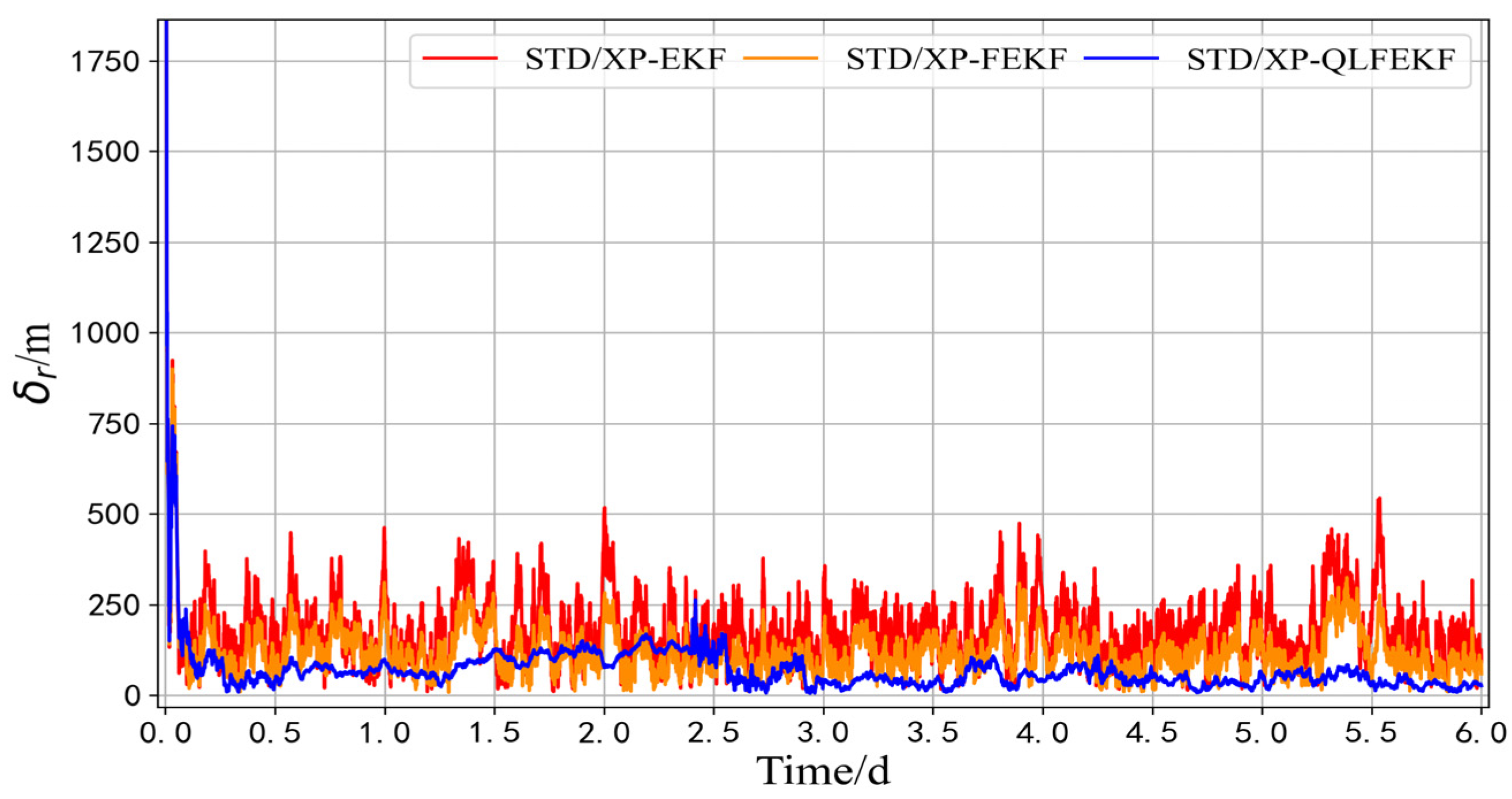
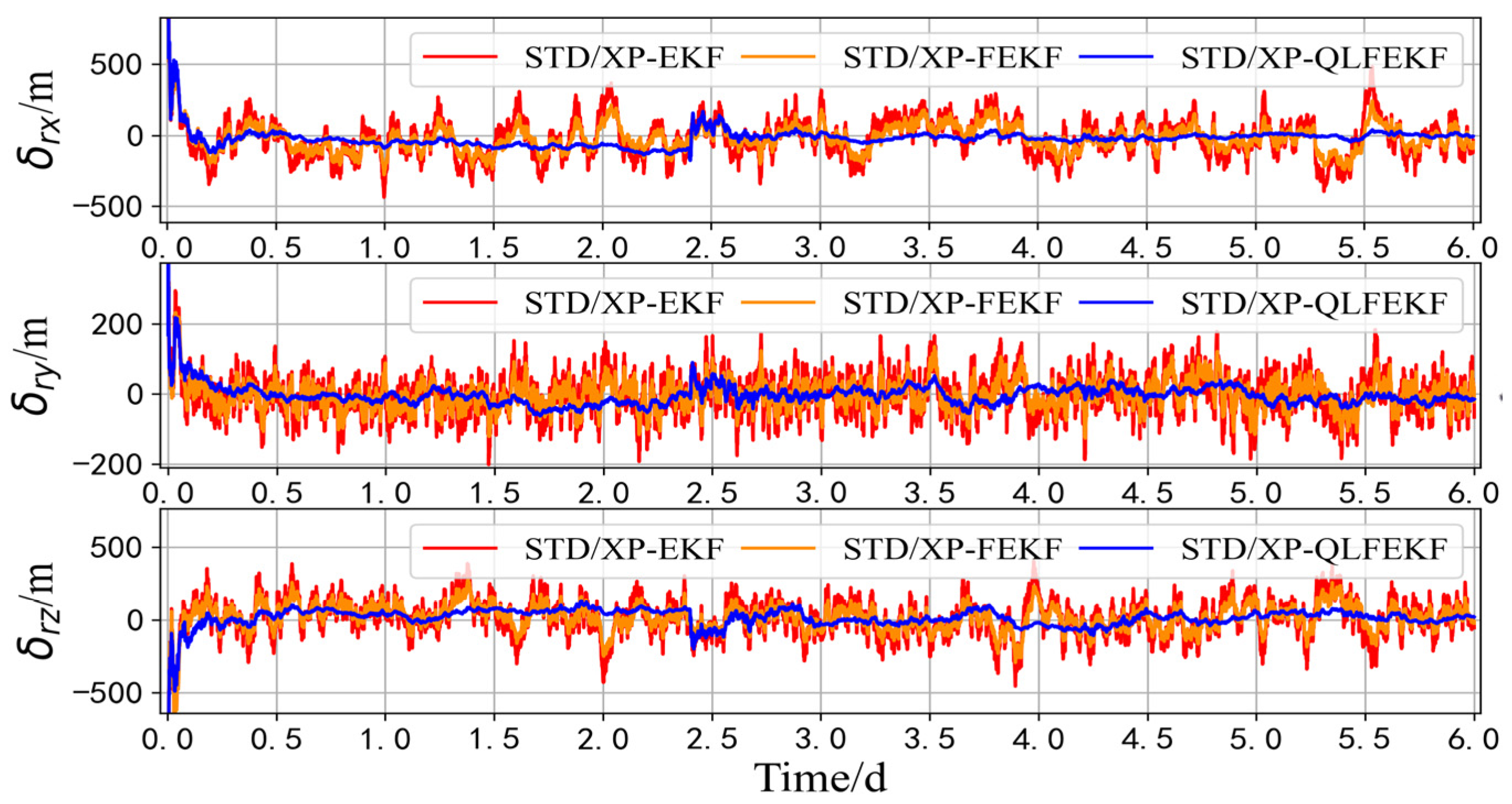
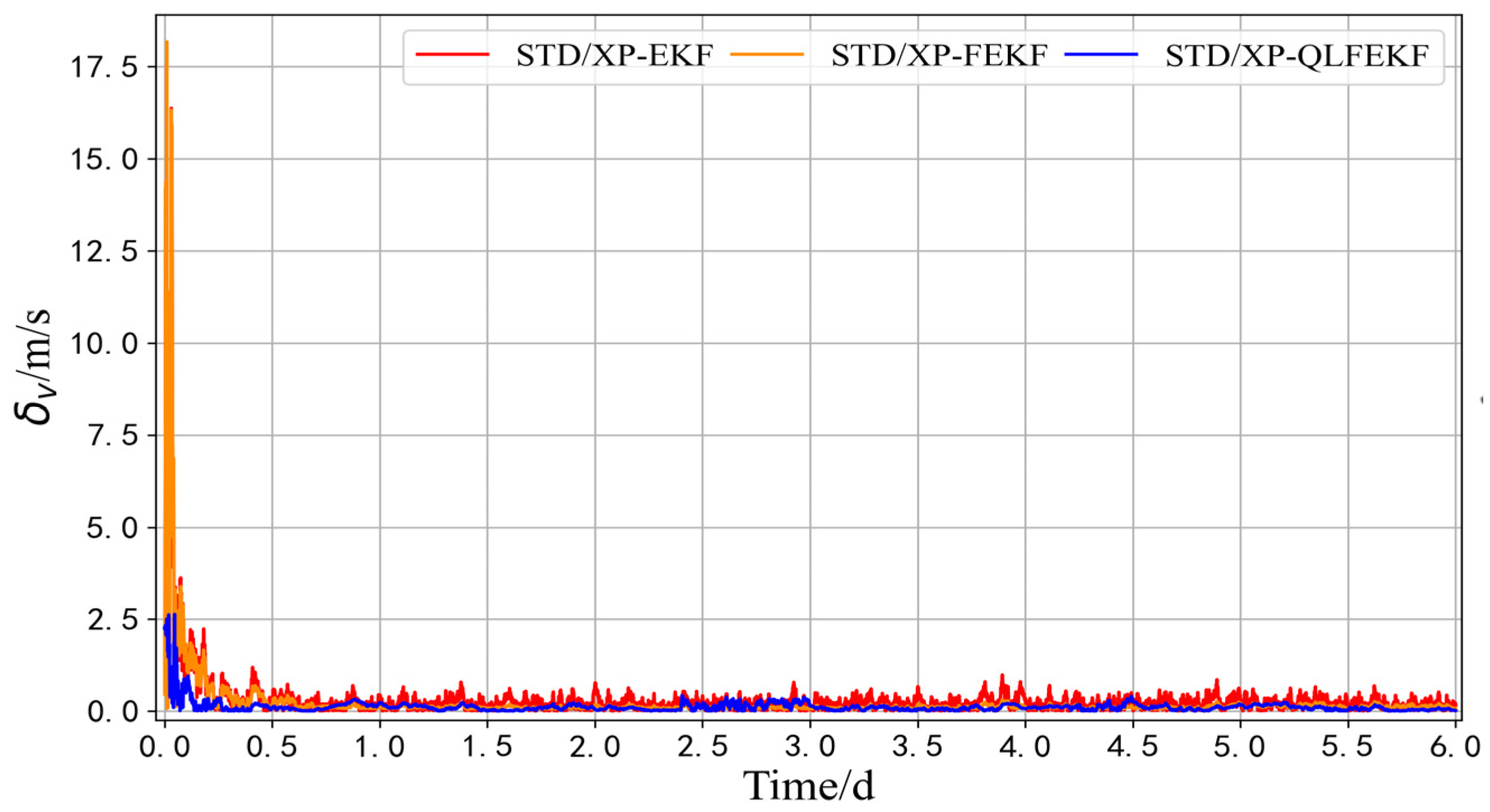
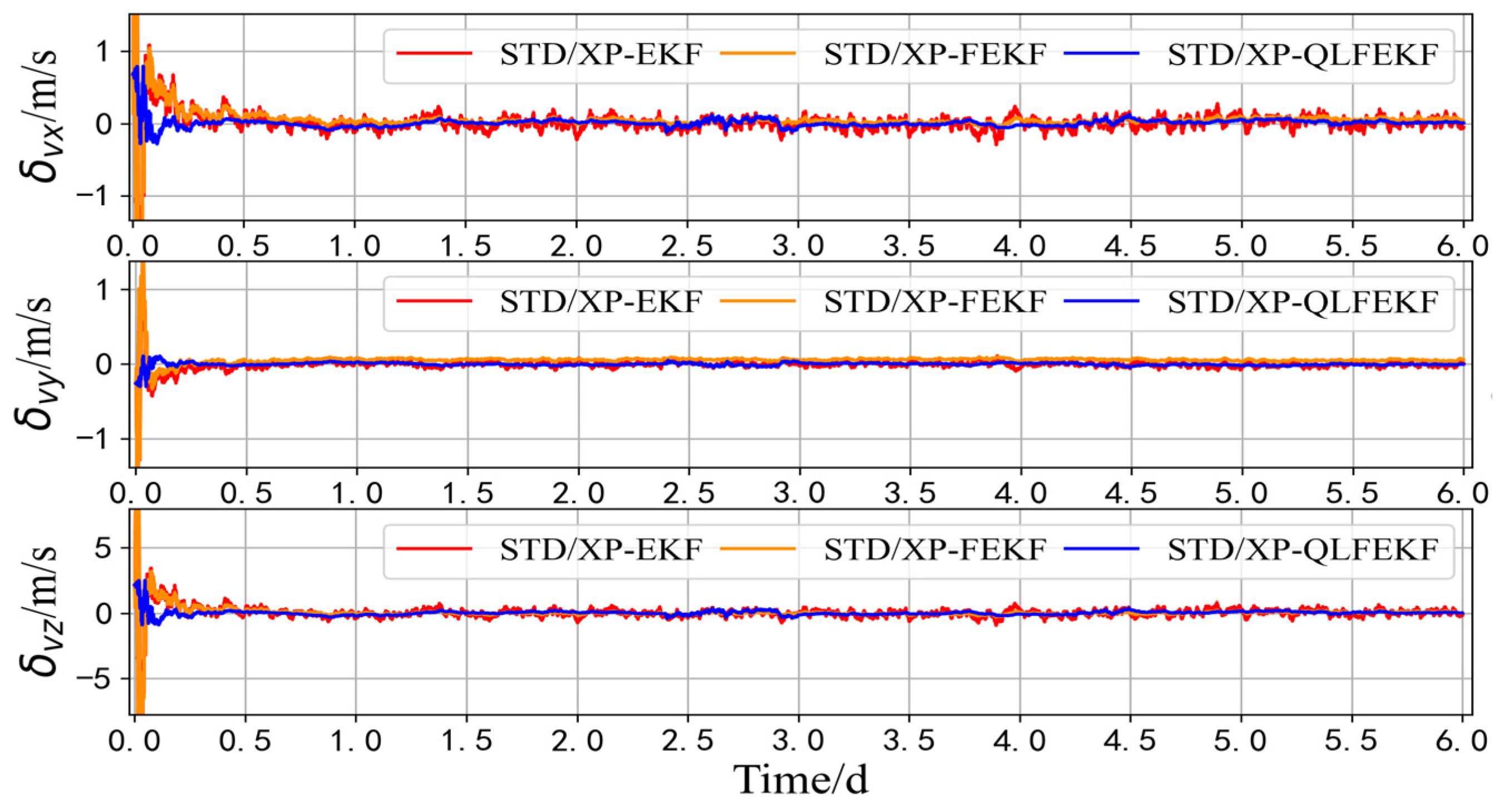
4.2. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SSBE | Solar System Boundary Exploration |
| FEKF | Federated Extended Kalman Filter |
| QLFEKF | Federated Extended Kalman Filter Based on Q-learning |
| PVSE | Position and Velocity State Estimation |
| VLBI | Very Long Baseline Interferometry |
| TT&C | Tracking Telemetry and Command |
| XNAV | X-ray Pulsar Navigation |
| TOA | Time-of-Arrival |
| SSB | Solar System Barycenter |
| TDOA | Time Difference of Arrival |
| EKF | Extended Kalman Filter |
| RL | Reinforcement Learning |
| LOS | Line of Sight |
| PA | Probe Agent |
| RMSE | Root Mean Squared Error |
| STD/XP-QLFEKF | X-ray Pulsar/Solar and Target Planetary Doppler Velocity Measurement Based on the Q-learning Federation EKF |
| STD/XP-EKF | X-ray Pulsar/Solar and Target Planetary Doppler Velocity Measurement Based on EKF |
| STD/XP-FEKF | X-ray Pulsar/Solar and Target Planetary Doppler Velocity Measurement Based on Federated EKF |
References
- Wu, W.; Yu, D.; Huang, J.; Zong, Q.; Wang, C.; Yu, G.; Hao, R.; Wang, Q.; Kang, Y.; Meng, L.; et al. Exploring the solar system boundary. Sci. Sin. Inform. 2019, 49, 1–16. [Google Scholar] [CrossRef]
- Hall, C.F. Pioneer 10 and pioneer 11. Science 1975, 4187, 445–446. [Google Scholar] [CrossRef] [PubMed]
- Courty, J.M.; Levy, A.; Christophe, B.; Reynaud, S. Simulation of ambiguity effects in Doppler tracking of Pioneer probes. Space Sci. Rev. 2010, 151, 93–103. [Google Scholar] [CrossRef]
- Capova, K.A. Introducing Humans to the Extraterrestrials: The Pioneering Missions of the Pioneer and Voyager Probes. Front. Hum. Dyn. 2021, 3, 714616. [Google Scholar] [CrossRef]
- Burlaga, L.F.; Ness, N.F.; Stone, E.C. Magnetic field observations as Voyager 1 entered the heliosheath depletion region. Science 2013, 341, 147–150. [Google Scholar] [CrossRef]
- Stone, E.C.; Cummings, A.C.; Heikkila, B.C.; Lal, N. Cosmic ray measurements from Voyager 2 as it crossed into interstellar space. Nat. Astron. 2019, 3, 1013–1018. [Google Scholar] [CrossRef]
- Fountain, G.H.; Kusnierkiewicz, D.; Hersman, C.; Herder, T.; Coughlin, T.; Gibson, W.; Clancy, D.; DeBoy, C.; Hill, T.; Kinnison, J.; et al. The new horizons spacecraft. Space Sci. Rev. 2008, 140, 23–47. [Google Scholar] [CrossRef]
- Guo, Y.P.; Farquhar, R.W. New Horizons mission design. Space Sci. Rev. 2008, 140, 49–74. [Google Scholar] [CrossRef]
- Liu, X.; Wang, J.; Li, X.; Chen, M.; Yu, Y. Laser communication proposal for solar system boundary exploration. J. Telem. Track. Command 2022, 43, 62–69. [Google Scholar] [CrossRef]
- Song, Y.; Wu, W.; Hu, H.; Lin, M.; Wang, H.; Zhang, J. Gravity assist space pruning and global optimization of spacecraft trajectories for solar system boundary exploration. Complex Intell. Syst. 2023, 10, 323–341. [Google Scholar] [CrossRef]
- Zheng, W.; Wang, Y. X-ray Pulsar–Based Navigation: Theory and Applications; Springer: Singapore, 2020; pp. 1–20. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Zheng, W.; Song, M. X-Ray Pulsar-based Navigation Scheme for Solar System Boundary Exploration. J. Phys. Conf. Ser. 2020, 2224, 012127. [Google Scholar] [CrossRef]
- Sheikh, S.I.; Pines, D.J.; Ray, P.S.; Wood, K.S.; Lovellette, M.N.; Wolff, M.T. Spacecraft Navigation Using X-Ray Pulsars. J. Guid. Control Dyn. 2006, 29, 49–63. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L. Relative navigation between two spacecraft using X-ray pulsars. IEEE Trans. Control Syst. Technol. 2010, 19, 1021–1035. [Google Scholar] [CrossRef]
- Shemar, S.; Fraser, G.; Heil, L.; Hindley, D.; Martindale, A.; Molyneux, P.; Pye, J.; Warwick, R.; Lamb, A. Towards practical autonomous deep-space navigation using X-Ray pulsar timing. Exp. Astron. 2016, 42, 101–138. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W. Pulse phase estimation of X-ray pulsar with the aid of vehicle orbital dynamics. J. Navig. 2016, 69, 414–432. [Google Scholar] [CrossRef]
- Rinauro, S.; Colonnese, S.; Scarano, G. Fast near-maximum likelihood phase estimation of X-ray pulsars. Signal Process. 2013, 93, 326–331. [Google Scholar] [CrossRef]
- Reichley, P.E.; Downs, G.S.; Morris, G.A. Time-of-Arrival Observations of Eleven Pulsars. Astrophys. J. 1970, 159, L35–L40. [Google Scholar] [CrossRef]
- Downs, G.S. Interplanetary Navigation Using Pulsating Radio Sources. NASA Technical Report N74-34150. 1974; pp. 1–12. Available online: https://ntrs.nasa.gov/api/citations/19740026037/downloads/19740026037.pdf (accessed on 12 June 2024).
- Runnels, J.T.; Demoz, G.E. Estimator for deep-space position and attitude using X-ray pulsars. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2149–2166. [Google Scholar] [CrossRef]
- Gao, J.; Fang, H.; Su, J. Differential X-Ray Pulsar Navigation Method Based on Pulse Arrival Time Difference. In China Satellite Navigation Conference (CSNC 2022) Proceedings: Volume III; Springer Nature: Singapore, 2022; pp. 552–562. [Google Scholar] [CrossRef]
- Huang, S.; Kang, Z.; Liu, J.; Ma, X. Accuracy analysis of spectral velocimetry for the solar Doppler difference navigation. IEEE Access 2021, 9, 78075–78082. [Google Scholar] [CrossRef]
- Yim, J.R.; Crassidis, J.L.; Junkins, J.L. Autonomous orbit navigation of interplanetary spacecraft. In Proceedings of the Astrodynamics Specialist Conference, Denver, CO, USA, 14–17 August 2000; pp. 53–61. [Google Scholar] [CrossRef]
- Ning, X.; Gui, M.; Fang, J.; Liu, G.; Dai, Y. A novel differential Doppler measurement-aided autonomous celestial navigation method for spacecraft during approach phase. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 587–597. [Google Scholar] [CrossRef]
- Liu, J.; Kang, Z.; Wuite, P.; Ma, J.; Tian, J. Doppler/XNAV–integrated navigation system using small-area X-ray sensor. IET Radar Sonar Navig. 2011, 5, 1010–1017. [Google Scholar] [CrossRef]
- Pan, C.; Liu, J.; Kang, Z.; Chen, X. Solar TDOA/Doppler difference joint observation navigation for the approach phase of mars exploration. Int. J. Aeronaut. Space Sci. 2020, 9, 836–844. [Google Scholar] [CrossRef]
- Cui, P.; Wang, S.; Gao, A.; Yu, Z. X-ray pulsars/Doppler integrated navigation for Mars final approach. Adv. Space Res. 2016, 57, 1889–1900. [Google Scholar] [CrossRef]
- Xu, Y.; Cao, J.; Shmaliy, Y.S.; Zhuang, Y. Distributed Kalman filter for UWB/INS integrated pedestrian localization under colored measurement noise. Satell. Navig. 2021, 2, 22. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Wang, B.; Lin, Y.; Han, C. Resilient timekeeping algorithm with multi-observation fusion Kalman filter. Satell. Navig. 2023, 4, 25. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control. 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Xin, S.J.; Wang, X.M.; Zhang, J.L.; Zhou, K.; Chen, Y.F. A Comparative Study of Factor Graph Optimization-Based and Extended Kalman Filter-Based PPP-B2b/INS Integrated Navigation. Remote Sens. 2023, 15, 5144. [Google Scholar] [CrossRef]
- Yin, Z.H.; Yang, J.C.; Ma, Y.; Wang, S.L.; Chai, D.S.; Cui, H.N. A Robust Adaptive Extended Kalman Filter Based on an Improved Measurement Noise Covariance Matrix for the Monitoring and Isolation of Abnormal Disturbances in GNSS/INS Vehicle Navigation. Remote Sens. 2023, 15, 4125. [Google Scholar] [CrossRef]
- Kang, Z.; Xu, X.; Liu, J.; Li, N. Doppler velocity measurement based on double measurement model and its integrated navigation. J. Astronaut. 2017, 38, 964–970. [Google Scholar] [CrossRef]
- Qiao, L.; Liu, J.; Zheng, G.; Xiong, Z. Augmentation of XNAV system to an ultraviolet sensor-based satellite navigation system. IEEE J. Sel. Top. Signal Process. 2009, 3, 777–785. [Google Scholar] [CrossRef]
- Yang, C.; Zheng, J.; Gao, D. Autonomous orbit and attitude determination including time prediction based on XNAV and ultraviolet sensor. Chin. J. Space Sci. 2013, 33, 194–199. [Google Scholar] [CrossRef]
- Liu, J.; Fang, J.; Yang, Z.; Kang, Z.; Wu, J. X-ray pulsar/Doppler difference integrated navigation for deep space exploration with unstable solar spectrum. Aerosp. Sci. Technol. 2015, 41, 144–150. [Google Scholar] [CrossRef]
- Ou, J.J.; Guo, X.; Lou, W.J.; Zhu, M. Quadrotor autonomous navigation in semi-known environments based on deep reinforcement learning. Remote Sens. 2021, 13, 4330. [Google Scholar] [CrossRef]
- Xiong, K.; Zhao, Q.; Yuan, L. Calibration Method for Relativistic Navigation System Using Parallel Q-Learning Extended Kalman Filter. Sensors 2024, 24, 6186. [Google Scholar] [CrossRef] [PubMed]
- Xiong, K.; Wei, C.; Zhang, H. Q-learning for noise covariance adaptation in extended KALMAN filter. Asian J. Control 2021, 23, 1803–1816. [Google Scholar] [CrossRef]
- Xiong, K.; Wei, C. Integrated celestial navigation for spacecraft using interferometer and Earth sensor. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 2248–2262. [Google Scholar] [CrossRef]
- Nemati, M.H.; Kankashvar, M.R.; Bolandi, H. Unscented Kalman Filter adaptive noise covariance selection for satellite formation flying with Q_leaming. In Proceedings of the 2022 30th International Conference on Electrical Engineering (ICEE), IEEE, Tehran, Iran, 17–19 May 2022; pp. 362–367. [Google Scholar] [CrossRef]
- Xiong, K.; Peng, Z.; Wei, C. Spacecraft autonomous navigation using line-of-sight directions of non-cooperative targets by improved Q-learning based extended Kalman filter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2024, 238, 182–197. [Google Scholar] [CrossRef]
- Chang, X.; Cui, P.; Cui, H. Research on Autonomous Navigation Method of Deep Space Cruise Phase Based on the Sun Observation. Yuhang Xuebao/J. Astronaut. 2010, 31, 1017–1023. [Google Scholar] [CrossRef]
- Chen, X.; You, W.; Huang, Q. Research on Celestial Navigation for Mars Missions during the Interplanetary Cruising. J. Deep Space Explor. 2016, 3, 214–218. [Google Scholar] [CrossRef]
- Song, M.; Yuan, Y. Research on Autonomous Navigation Method for the Cruise Phase of Mars Exploration. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 952–957. [Google Scholar] [CrossRef]
- Liu, J.; Fang, J.; Kang, Z.; Wu, J.; Ning, X. Novel algorithm for X-ray pulsar navigation against Doppler effects. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 228–241. [Google Scholar] [CrossRef]
- Emadzadeh, A.A.; Speyer, J.L. On modeling and pulse phase estimation of X-ray pulsars. IEEE Trans. Signal Process. 2010, 58, 4484–4495. [Google Scholar] [CrossRef]
- Sheikh, S.I.; Hanson, J.E.; Graven, P.H.; Pines, D.J. Spacecraft navigation and timing using X-ray pulsars. Navigation 2011, 58, 165–186. [Google Scholar] [CrossRef]
- Liu, J.; Ma, J.; Tian, J. Pulsar/CNS integrated navigation based on federated UKF. J. Syst. Eng. Electron. 2010, 21, 675–681. [Google Scholar] [CrossRef]
- Watkins, C.J.C.H.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- AlMahamid, F.; Grolinger, K. Autonomous unmanned aerial vehicle navigation using reinforcement learning: A systematic review. Eng. Appl. Artif. Intell. 2022, 115, 105321. [Google Scholar] [CrossRef]
- Wong, A.; Bäck, T.; Kononova, A.V.; Plaat, A. Deep multiagent reinforcement learning: Challenges and directions. Artif. Intell. Rev. 2023, 56, 5023–5056. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, W.; Sun, S. X-ray pulsar-based navigation system/Sun measurement integrated navigation method for deep space explorer. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1843–1852. [Google Scholar] [CrossRef]
- Xu, Q.; Fan, X.; Zhao, A.; Cui, H.; Xu, L.; Liu, N.; Ding, B. Pre-correction X-ray pulsar navigation algorithm based on asynchronous overlapping observation method. Adv. Space Res. 2021, 67, 583–596. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Conditions | Parameters Value |
| Initial position values | [53,107,871.00559; 137,626,318.36608; −10,143.24541] km |
| Initial velocity values | [−14.01219; 35.86413; 0.42128] km/s |
| Initial state errors | δX0 = [δrx, δry, δrz, δvx, δvy, δvz]T δrx = δry = δrz = 1.0 × 102 km, δvx = δvy = δvz = 2.0 × 10−3 km/s |
| Initial state estimation covariance | |
| Initial state process noise covariance | , q1 = 2.0 × 10−3 km; q2 = 3.0 × 10−6 km/s |
| Pulsars Name | RAD (°) | DEC (°) | D0 (kpc) | P (10−3 s) | W (10−3 s) | Fx (ph/cm2/s) | Pf (%) |
|---|---|---|---|---|---|---|---|
| PSR B1937+21 | 294.92 | 21.580 | 3.6 | 1.56 | 0.021 | 4.99 × 10−5 | 86 |
| PSR B0531+21 | 83.63 | 22.014 | 2.0 | 33.5 | 1.670 | 1.54 | 70 |
| PSR J1821-24 | 276.13 | −24.870 | 5.5 | 3.05 | 0.055 | 1.93 × 10−4 | 98 |
| Initial Condition | Parameters Name | Parameters Value |
|---|---|---|
| XNAV Measurement | Number of detectors | 3 |
| Effective area of the detectors | 1 m2 | |
| Measurement noise variance matrix | ||
| Solar/target planetary Doppler measurement | Number of the spectrometers | 2 |
| Accuracy of the spectrometers | d1 = d2 = 10−6 km/s | |
| Velocity measurement navigation measurement noise variance matrix |
| Parameter Name | Value | |
|---|---|---|
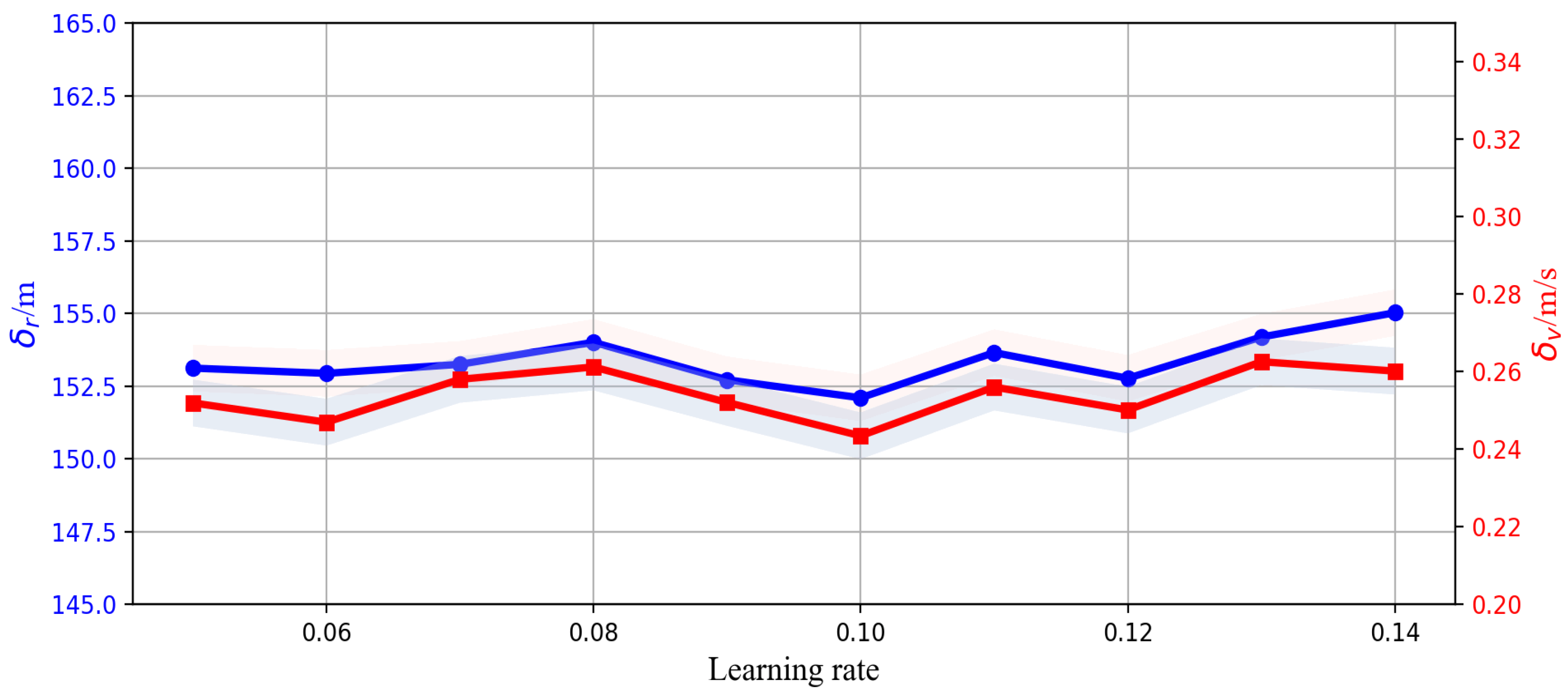
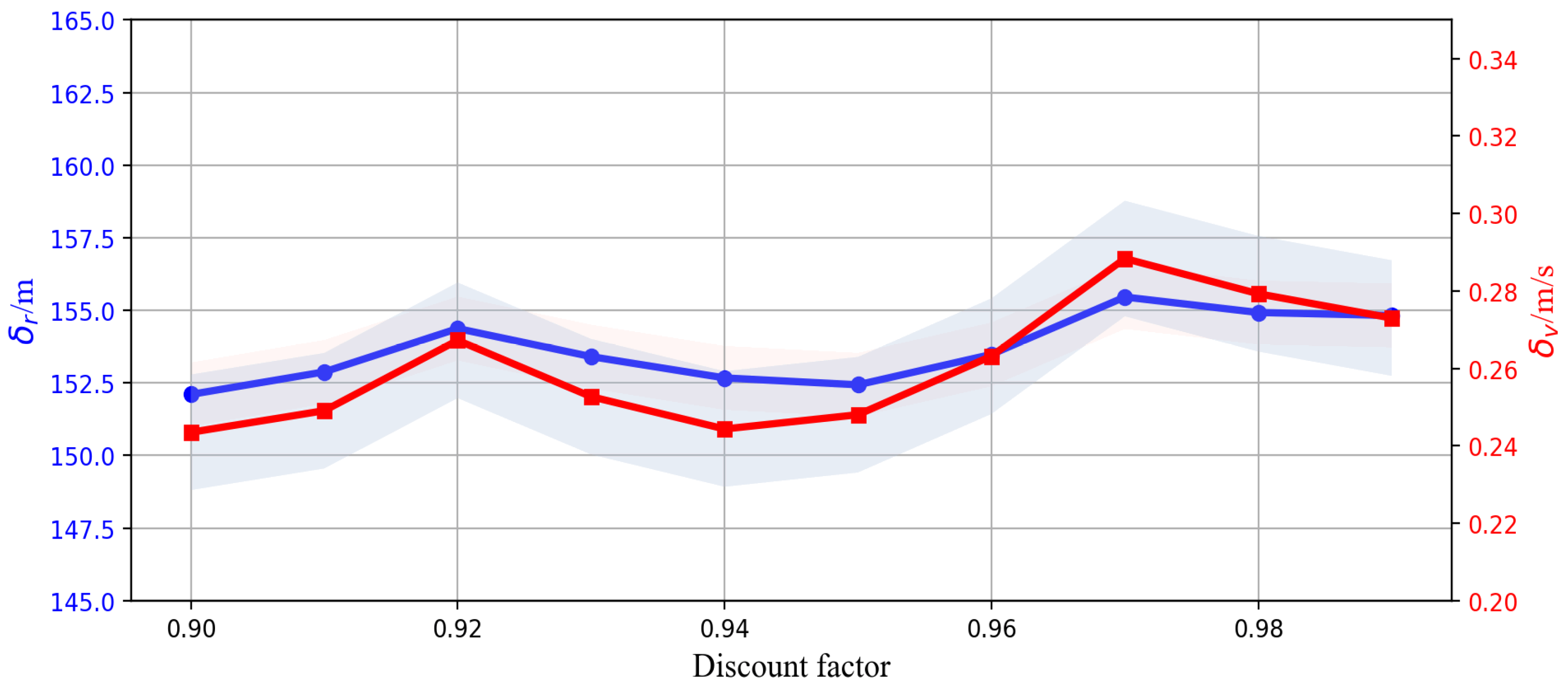
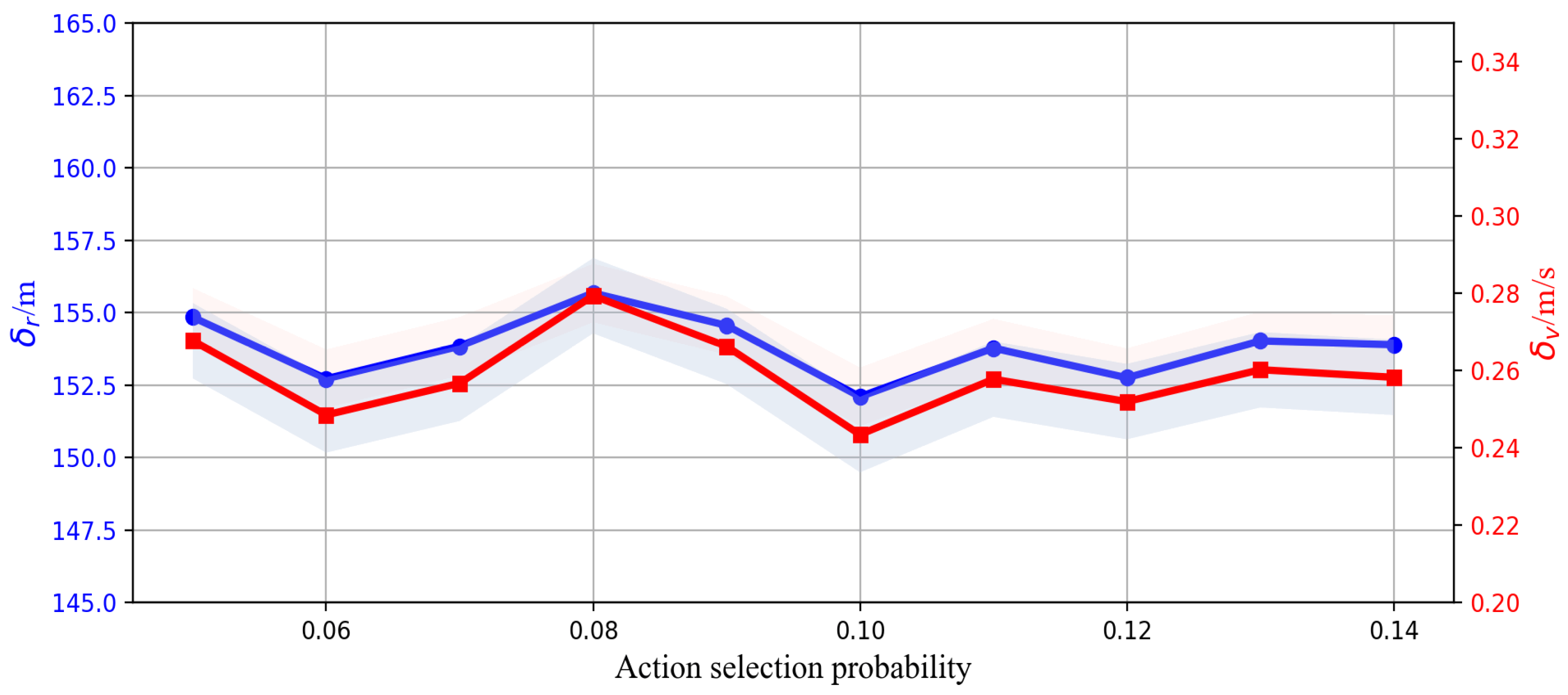
| Learning rate, discount factor, and greedy values | α | 0.1 |
| γ | 0.9 | |
| ε | 0.1 | |
| The upper edge and lower edge bounds of , , , and | [1/202 1/102] | |
| [1/102 102] | ||
| [1/102 1] | ||
| [1/102 1/101] | ||
| Filter Algorithm | Position Estimation Accuracy (m) | Velocity Estimation Accuracy (m/s) | ||||||
|---|---|---|---|---|---|---|---|---|
| rx | ry | rz | r | vx | vy | vz | v | |
| STD/XP-EKF | 414.797 | 174.586 | 380.772 | 443.560 | 0.196 | 0.089 | 0.610 | 0.630 |
| STD/XP-FEKF | 335.289 | 132.138 | 279.342 | 351.803 | 0.169 | 0.158 | 0.289 | 0.386 |
| STD/XP-QLFEKF | 148.075 | 65.095 | 78.936 | 152.101 | 0.086 | 0.104 | 0.150 | 0.243 |
| Navigation accuracy improvement rate | 55.84% | 50.73% | 71.74% | 56.76% | 49.11% | 34.18% | 48.10% | 37.04% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, W.; Zhang, J.; Song, J.; Lin, Q.; Chen, Z.; Wang, H.; Yang, J.; Wang, J. Intelligent QLFEKF Integrated Navigation for the SSBE Cruise Phase Based on X-Ray Pulsar/Solar and Target Planetary Doppler Information Fusion. Remote Sens. 2024, 16, 4465. https://doi.org/10.3390/rs16234465
Tao W, Zhang J, Song J, Lin Q, Chen Z, Wang H, Yang J, Wang J. Intelligent QLFEKF Integrated Navigation for the SSBE Cruise Phase Based on X-Ray Pulsar/Solar and Target Planetary Doppler Information Fusion. Remote Sensing. 2024; 16(23):4465. https://doi.org/10.3390/rs16234465
Chicago/Turabian StyleTao, Wenjian, Jinxiu Zhang, Jianing Song, Qin Lin, Zebin Chen, Hui Wang, Jikun Yang, and Jihe Wang. 2024. "Intelligent QLFEKF Integrated Navigation for the SSBE Cruise Phase Based on X-Ray Pulsar/Solar and Target Planetary Doppler Information Fusion" Remote Sensing 16, no. 23: 4465. https://doi.org/10.3390/rs16234465
APA StyleTao, W., Zhang, J., Song, J., Lin, Q., Chen, Z., Wang, H., Yang, J., & Wang, J. (2024). Intelligent QLFEKF Integrated Navigation for the SSBE Cruise Phase Based on X-Ray Pulsar/Solar and Target Planetary Doppler Information Fusion. Remote Sensing, 16(23), 4465. https://doi.org/10.3390/rs16234465