



A Fast Algorithm for Matching AIS Trajectories with Radar Point Data in Complex Environments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
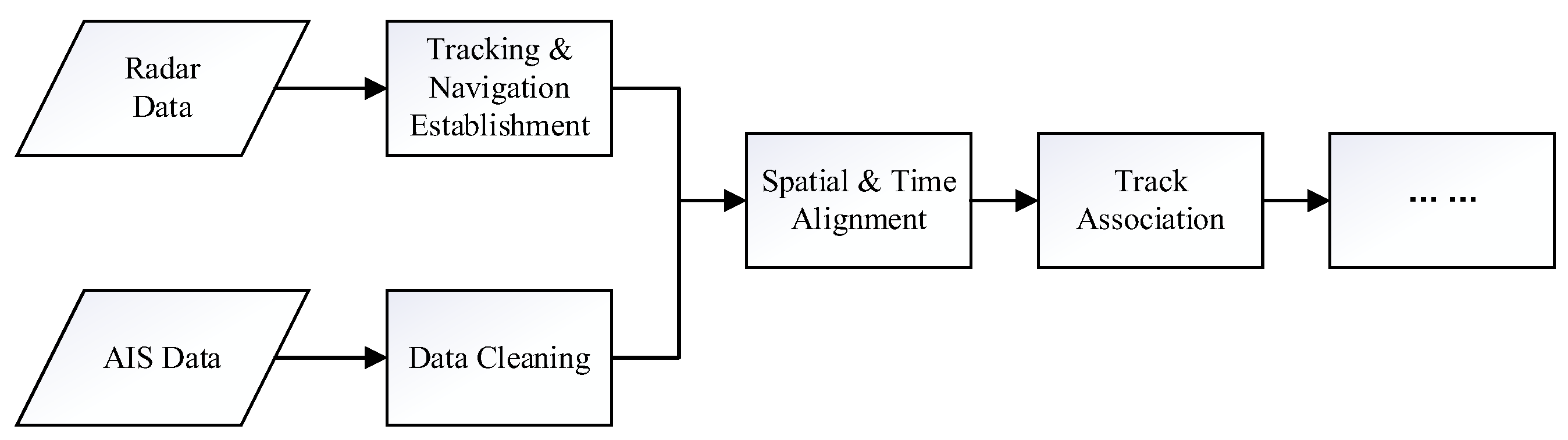
2. Materials and Methods
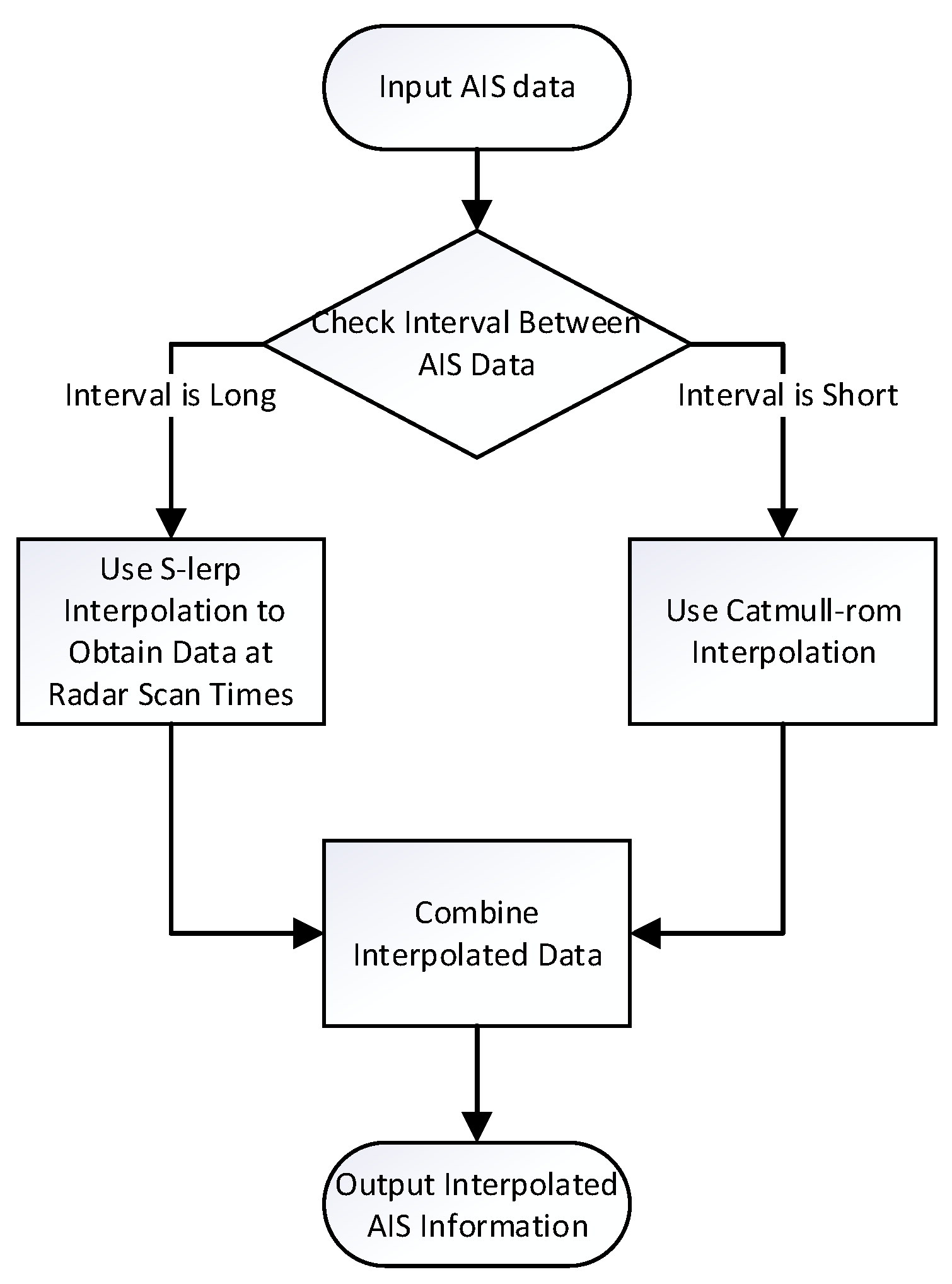
2.1. Time and Spatial Unification
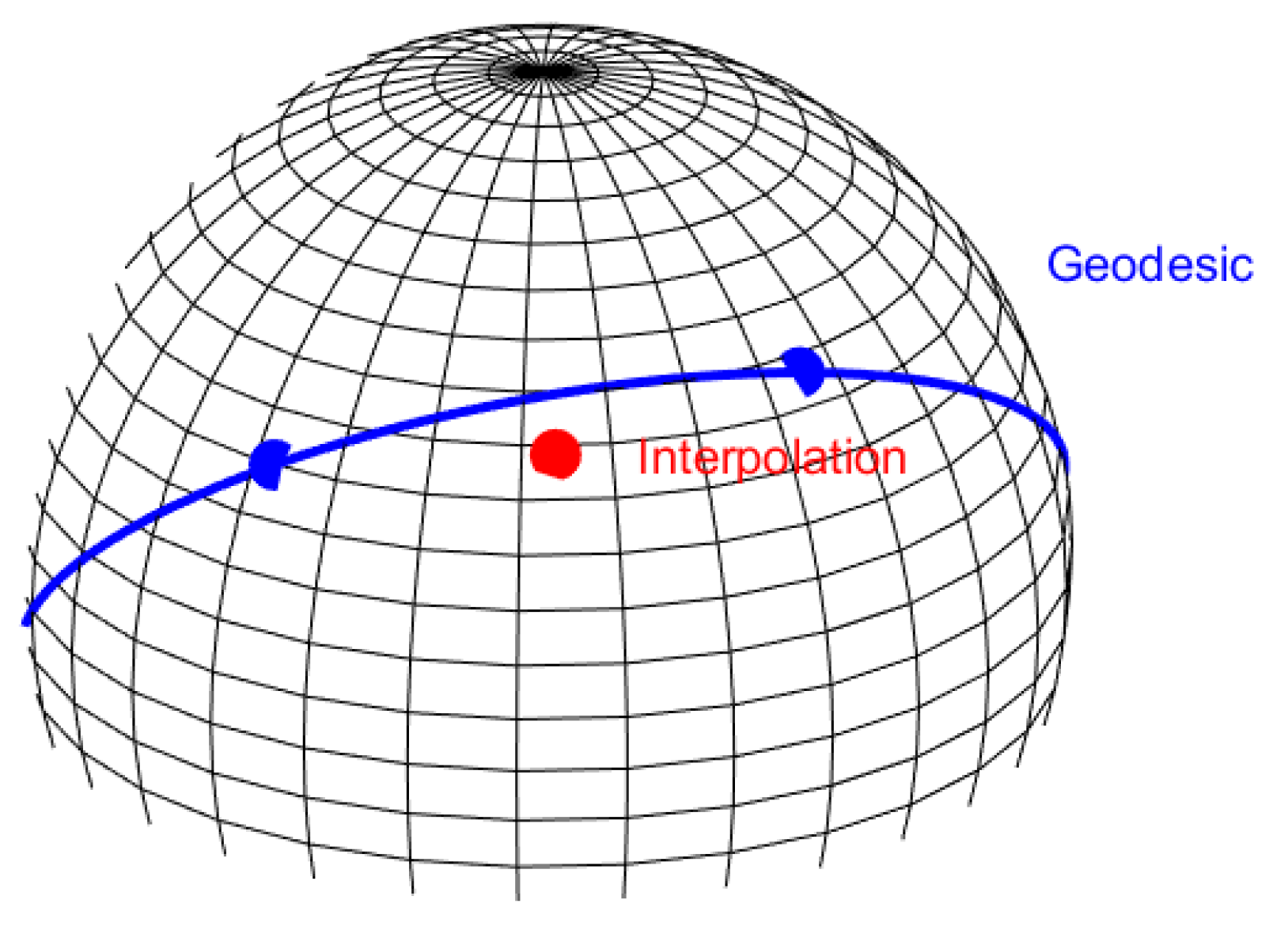
2.1.1. SLERP Interpolation
- Error Analysis of Interpolation Methods
- SLERP-Based Latitude and Longitude Interpolation
- Convert latitude and longitude to a quaternion-based Cartesian system.
- Apply SLERP interpolation.
- Reconvert the results to latitude and longitude.
2.1.2. Catmull–Rom
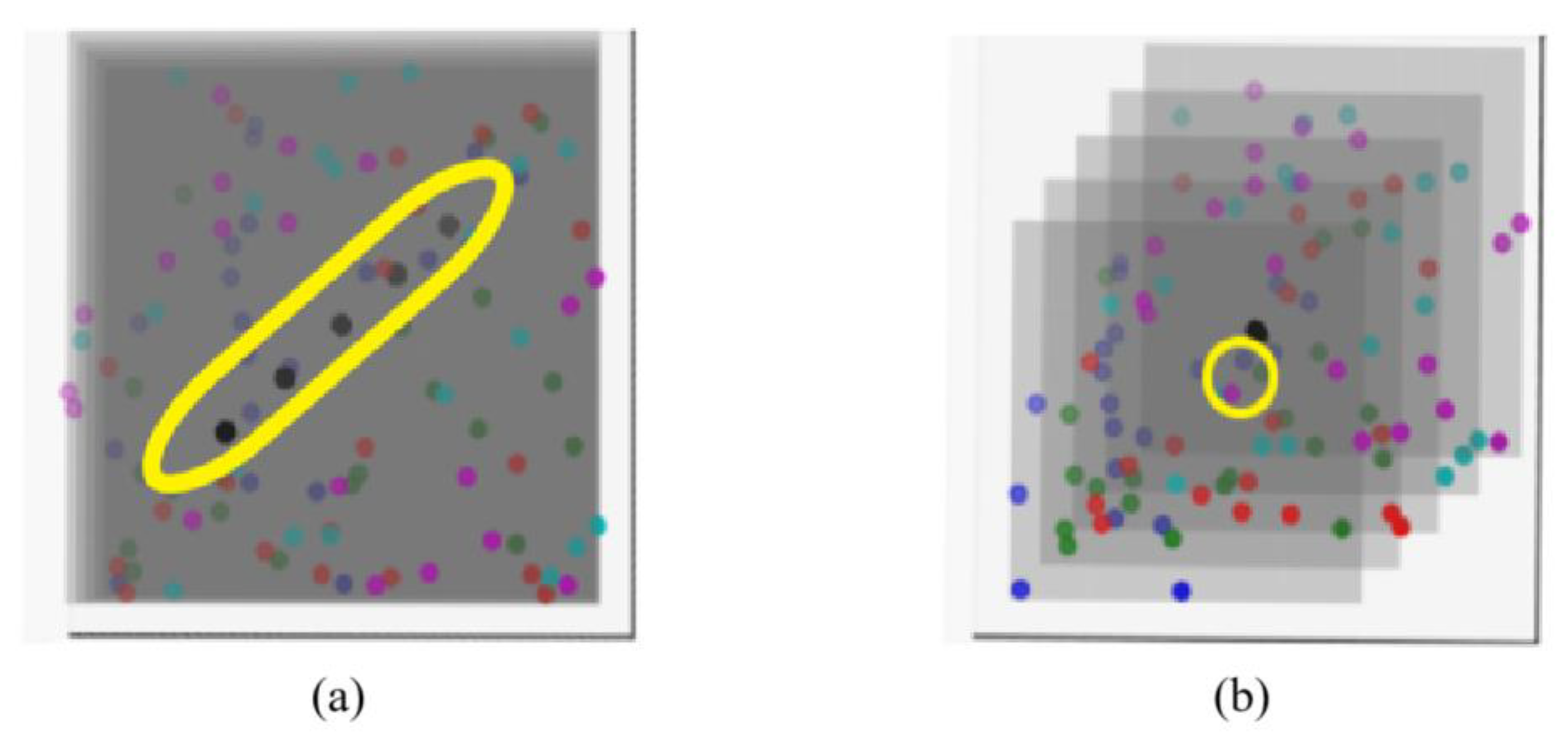
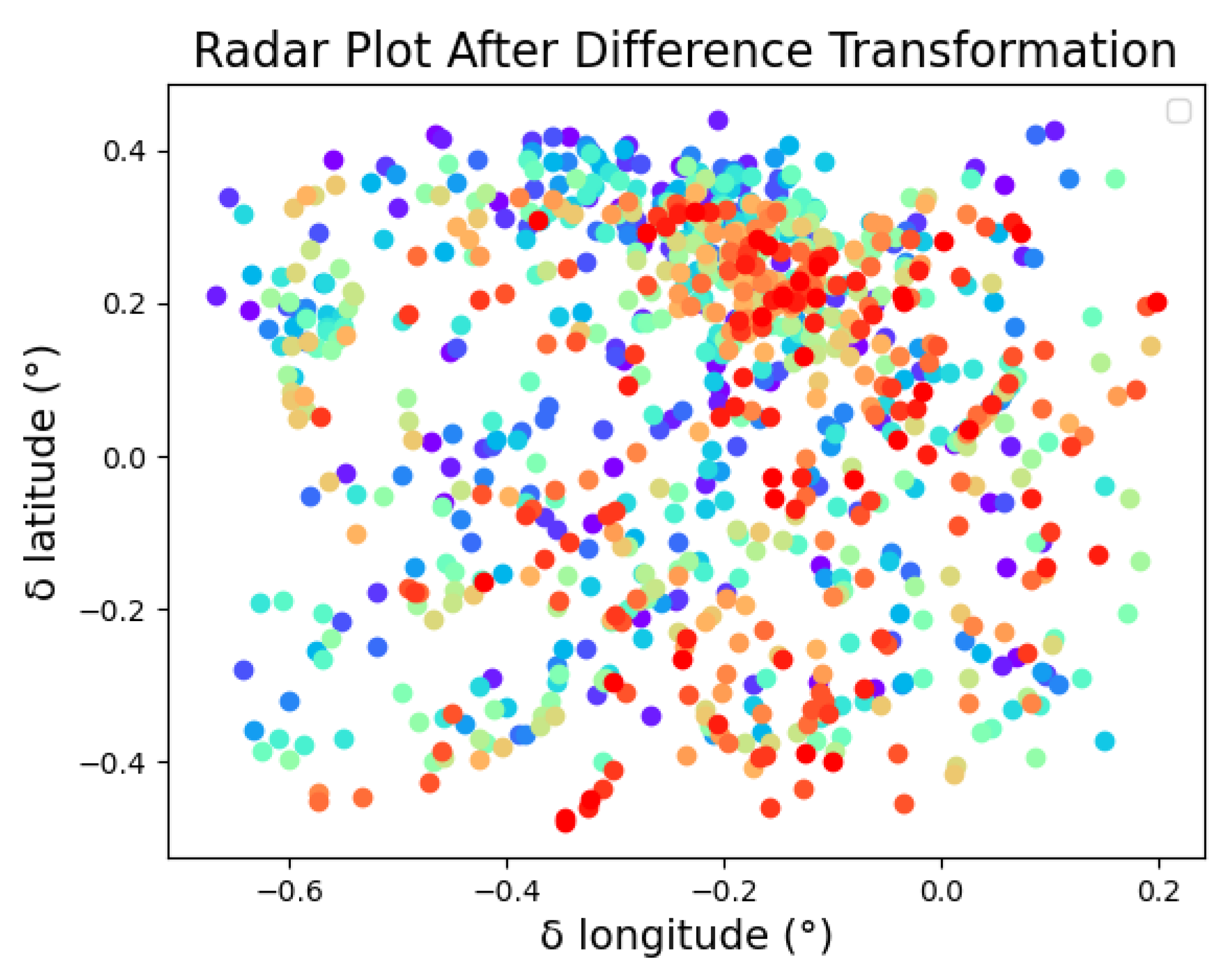
2.2. Stacking & Diffusion Transformation
2.2.1. Processing of Location Information
2.2.2. Transformation Based on Kinematics
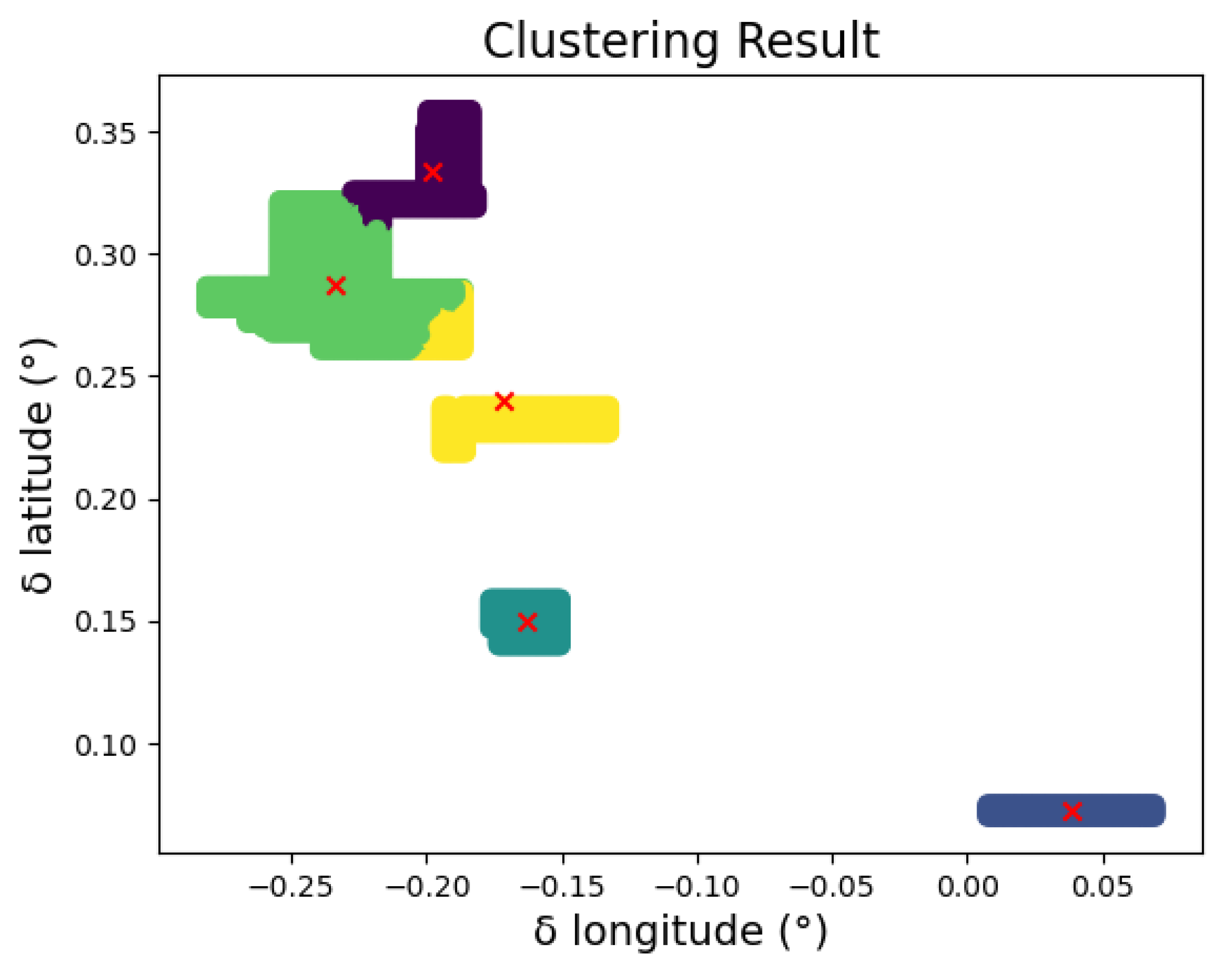
2.3. Parameter Extraction
- Adjust . For any given , find a suitable r such that the intersection becomes a single point. Due to the increased constraints, the solution set becomes a line or a point (in extreme cases).
- Select the point on this line that is closest to the origin, narrowing down the solution set to a single optimal point.
- Algorithm complexity optimization
- Function Optimal Solution Non-True Value Problem
2.4. Indexing Radar Trace
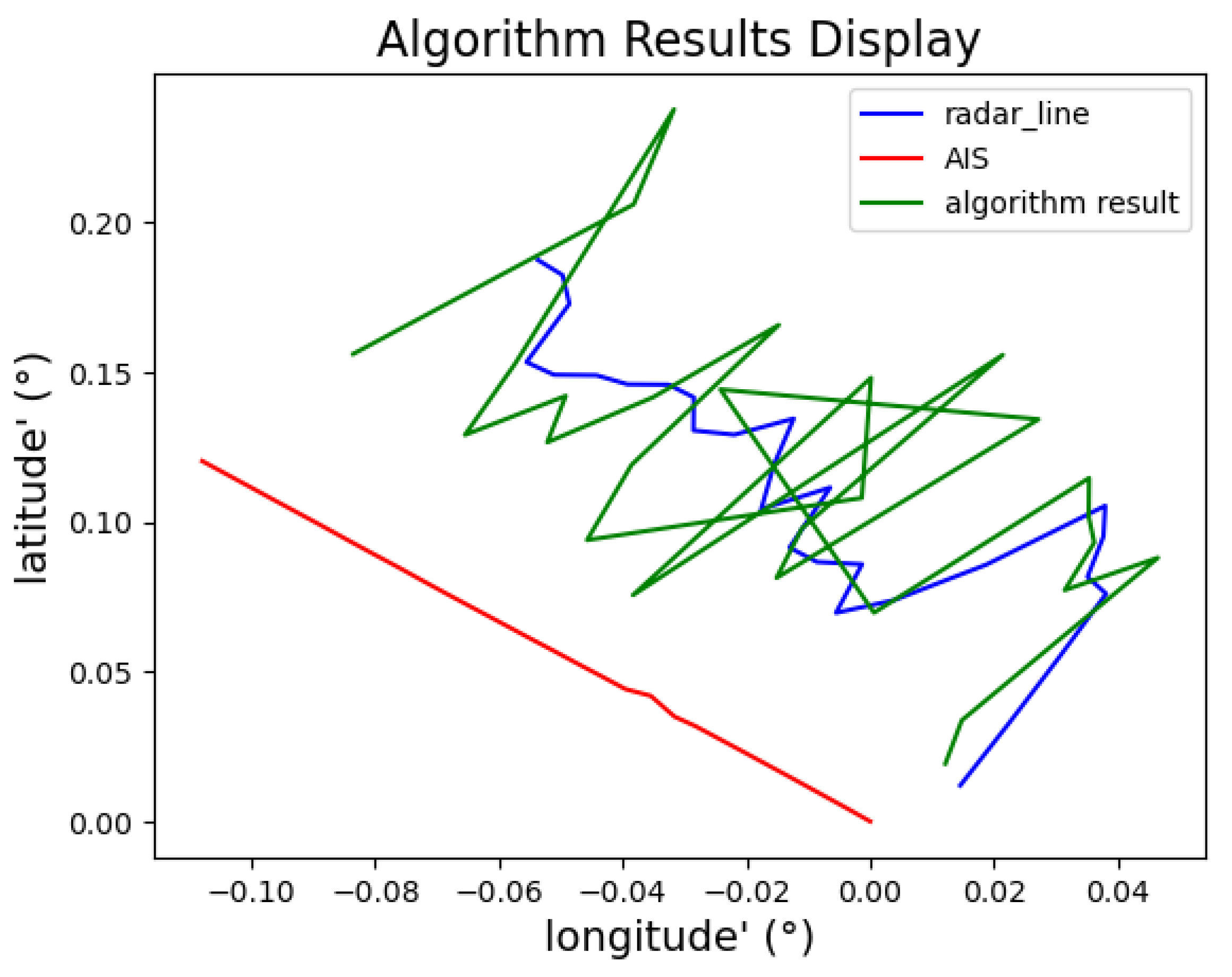
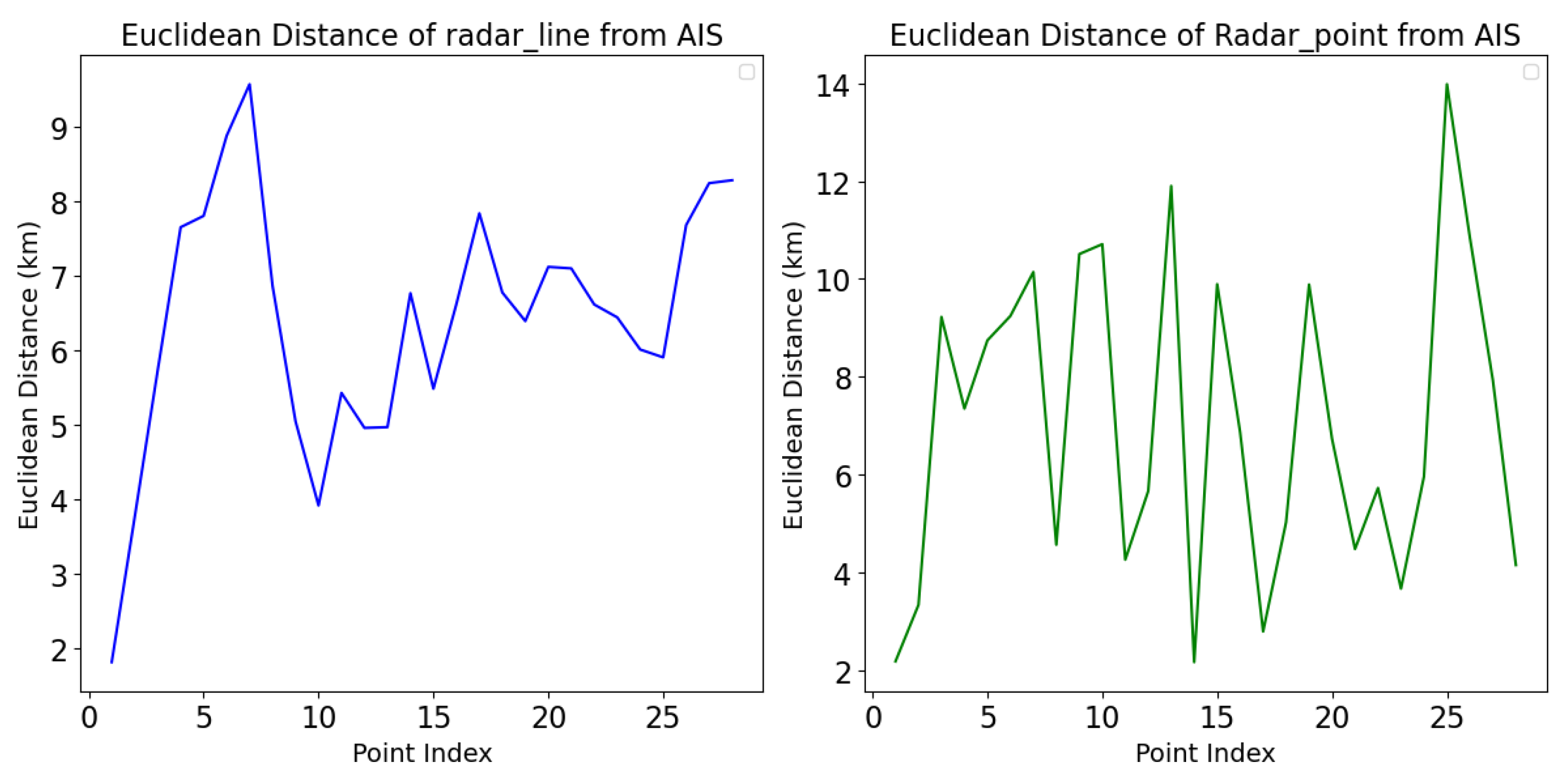
3. Results
- Simulation Data Validation
- Experimental Data Validation
4. Discussion
4.1. Impact of Hyperparameter
- Threshold size:
- Number of clusters:
- Resolution:
- Weights:
4.2. Error Analysis
4.3. Directions for Improvement
- Multi-Track Fitting
- Track Interruption
- Extraction of Parameter
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, C.M.; Li, Y.; Min, L.; Chen, J.; Lin, Z.; Su, S.; Zhang, Y.; Chen, Q.; Chen, Y.; Duan, X.; et al. Intelligent marine area supervision based on AIS and radar fusion. Ocean. Eng. 2023, 285, 115373. [Google Scholar] [CrossRef]
- Du, L.; Goerlandt, F.; Kujala, P. Review and analysis of methods for assessing maritime waterway risk based on non-accident critical events detected from AIS data. Reliab. Eng. Syst. Saf. 2020, 200, 106933. [Google Scholar] [CrossRef]
- Qu, X.; Meng, Q.; Suyi, L. Ship collision risk assessment for the Singapore Strait. Accid. Anal. Prev. 2011, 43, 2030–2036. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Qi, L.; Wang, W.; Lei, F.; Zhu, H. Research and Implementation of AIS and Radar Information Fusion Method. In Proceedings of the 2022 6th Annual International Conference on Data Science and Business Analytics (ICDSBA), Changsha, China, 14–18 October 2022; pp. 532–539. [Google Scholar]
- Last, P.; Bahlke, C.; Hering-Bertram, M.; Linsen, L. Comprehensive Analysis of Automatic Identification System (AIS) Data in Regard to Vessel Movement Prediction. J. Navig. 2014, 67, 791–809. [Google Scholar] [CrossRef]
- Norris, A. AIS Implementation—Success or Failure? J. Navig. 2007, 60, 1–10. [Google Scholar] [CrossRef]
- Last, P.; Hering-Bertram, M.; Linsen, L. How automatic identification system (AIS) antenna setup affects AIS signal quality. Ocean. Eng. 2015, 100, 83–89. [Google Scholar] [CrossRef]
- Lei, J.; Sun, Y.; Wu, Y.; Zheng, F.; He, W.; Liu, X. Association of AIS and Radar Data in Intelligent Navigation in Inland Waterways Based on Trajectory Characteristics. J. Mar. Sci. Eng. 2024, 12, 890. [Google Scholar] [CrossRef]
- Katsilieris, F.; Braca, P.; Coraluppi, S. Detection of malicious AIS position spoofing by exploiting radar information. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1196–1203. [Google Scholar]
- Habtemariam, B.; Tharmarasa, R.; McDonald, M.; Kirubarajan, T. Measurement level AIS/radar fusion. Signal Process. 2015, 106, 348–357. [Google Scholar] [CrossRef]
- Lin, C.; Dong, F.; Hai, L.; Le, L.; Zhou, J.; Ou, Y. AIS information decoding and fuzzy fusion processing with marine radar. In Proceedings of the 2008 4th International Conference on Wireless Communications, Networking and Mobile Computing, Dalian, China, 12–14 October 2008; pp. 1–5. [Google Scholar]
- Liu, C.; Lin, B.; Liu, X.-M.; Suo, J.-D.; Liu, R.-J. Fuzzy correlation algorithm for multi-target fusion of automatic identification system and radar. J. Comput. Theor. Nanosci. 2013, 10, 2826–2830. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Ji, Y.; Wang, L.; Zhang, J. Multi-feature maximum likelihood association with space-borne SAR, HFSWR and AIS. J. Navig. 2017, 70, 359–378. [Google Scholar] [CrossRef]
- Ballard, D. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Carlson, B.; Evans, E.; Wilson, S. Search radar detection and track with the Hough transform. I. system concept. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 102–108. [Google Scholar] [CrossRef]
- Chen, D.; Chen, P.; Zhou, C. Research on AIS and Radar Information Fusion Method Based on Distributed Kalman. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 1482–1486. [Google Scholar]
- Wen, J.; Yu, G.; Gao, L.; Liu, Y.; Nie, X. HFSWR ship trajectory tracking and fusion with AIS using Kalman filter. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 456–461. [Google Scholar]
- Shoemake, K. Animating rotation with quaternion curves. In Proceedings of the 12th Annual Conference on Computer Graphics and Interactive Techniques, San Francisco, CA, USA, 22–26 July 1985; pp. 245–254. [Google Scholar]
- Catmull, E.; Rom, R. A class of local interpolating splines. In Computer Aided Geometric Design; Barnhill, R.E., Riesenfeld, R.F., Eds.; Academic Press: Cambridge, MA, USA, 1974; pp. 317–326. [Google Scholar]
- Harati-Mokhtari, A.; Wall, A.; Brooks, P.; Wang, J. Automatic Identification System (AIS): Data Reliability and Human Error Implications. J. Navig. 2007, 60, 373–389. [Google Scholar] [CrossRef]
- Sang, L.-Z.; Wall, A.; Mao, Z.; Yan, X.-P.; Wang, J. A novel method for restoring the trajectory of the inland waterway ship by using AIS data. Ocean. Eng. 2015, 110, 183–194. [Google Scholar] [CrossRef]
- Zhen, R.; Pan, J.; Shao, Z.-P. Advance in Character Mining and Prediction of Ship Behavior based on AIS Data. J. Geo-Inf. Sci. 2021, 23, 2111–2127. [Google Scholar] [CrossRef]
- Nguyen, V.-S.; Im, N.-K.; Lee, S.-M. The Interpolation Method for the missing AIS Data of Ship. J. Navig. Port. Res. 2015, 39, 377–384. [Google Scholar] [CrossRef]
- Chen, X.; Yang, J. Analysis of the uncertainty of the AIS-based bottom-up approach for estimating ship emissions. Mar. Pollut. Bull. 2024, 199, 115968. [Google Scholar] [CrossRef]
- Vincenty, T. Direct and inverse solutions of geodesics on the ellipsoid with application of nested equations. Surv. Rev. 1975, 23, 88–93. [Google Scholar] [CrossRef]
- Kremer, V.E. Quaternions and SLERP. In Proceedings of the Embots. dfki. de/doc/seminar ca/Kremer Quaternions. pdf. 2008. Available online: https://d1wqtxts1xzle7.cloudfront.net/47081754/lerp_slerp_nlerp-libre.pdf?1467902732=&response-content-disposition=inline%3B+filename%3DQuaternions_and_SLERP.pdf&Expires=1732248355&Signature=PukXdhFoxIxylwLaCCBewIFtMwLo-CGJrH~Fzqp6fJTCFiDAylV5AEgEOyIKruI2jsCqbmvPUz7B4p-h1cilHq~M6RiDiJnujKQHm7LvIX3AmmMijt5SJHUwenDhPwbeEgiSSXojwNPSlWuVxmKA033wLGk2CMahbs4VoWdg4JdEkPd-xjFzzVP2JBRQu9DyvNNEDJuoguGPDe80j-YFpy~1P-UMoK6txIb15um2Ivffb5QaxzNGRYfwbNLKhJdfXi0HK2sxYN0X8FXgf5gH4q3YvDbJVAfHMnvcyUAG2XUfCVkpWkGh4eckzWxuZx7y~eRzwfZqXioSG1Cpt9LlOw__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA (accessed on 18 November 2024).
- Kazimierski, W.; Stateczny, A. Radar and Automatic Identification System Track Fusion in an Electronic Chart Display and Information System. J. Navig. 2015, 68, 1141–1154. [Google Scholar] [CrossRef]
- Yan, J. Track Initiation of Radar Detection Data Points Based on a Single Platform. Master’s Thesis, Jiangnan University, Wuxi, China, 2011. (In Chinese with English abstract). [Google Scholar]
- Hough, P.V. Method and Means for Recognizing Complex Patterns. U.S. Patent 3,069,654, 18 December 1962. [Google Scholar]
- Mukhopadhyay, P.; Chaudhuri, B.B. A survey of Hough Transform. Pattern Recognit. 2015, 48, 993–1010. [Google Scholar] [CrossRef]
- Abellanas, M.; Hurtado, F.; Icking, C.; Klein, R.; Langetepe, E.; Ma, L.; Palop, B.; Sacristán, V. Smallest Color-Spanning Objects. In Algorithms—ESA 2001: 9th Annual European Symposium Århus, Denmark, 28–31 August 2001 Proceedings 9; Springer: Berlin/Heidelberg, Germany, 2001; pp. 278–289. [Google Scholar]
- Jia, C.; Yang, Y.; Xia, Y.; Chen, Y.T.; Parekh, Z.; Pham, H.; Le, Q.; Sung, Y.H.; Li, Z.; Duerig, T. Scaling Up Visual and Vision-Language Representation Learning With Noisy Text Supervision. arXiv 2021, arXiv:2102.05918. [Google Scholar] [CrossRef]
- Fix, E.; Hodges, J.L., Jr. Discriminatory Analysis: Nonparametric Discrimination: Consistency Properties. Int. Stat. Rev. 1989, 57, 238–247. [Google Scholar] [CrossRef]
- Jiang, B.; Sun, L.; Zhou, W.; Guan, J.; He, Y. A multi-target joint estimation method for radar calibration based on real-time AIS data. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–5. [Google Scholar]
- Kotsakis, C. Spatial coordinate transformations with noisy data. In Geospatial Analyses of Earth Observation (EO) Data; IntechOpen: London, UK, 2019. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Suo, Y.; Jiang, Y.; Yang, Q. A Fast Algorithm for Matching AIS Trajectories with Radar Point Data in Complex Environments. Remote Sens. 2024, 16, 4360. https://doi.org/10.3390/rs16234360
Xu J, Suo Y, Jiang Y, Yang Q. A Fast Algorithm for Matching AIS Trajectories with Radar Point Data in Complex Environments. Remote Sensing. 2024; 16(23):4360. https://doi.org/10.3390/rs16234360
Chicago/Turabian StyleXu, Jialuo, Ying Suo, Yuqing Jiang, and Qiang Yang. 2024. "A Fast Algorithm for Matching AIS Trajectories with Radar Point Data in Complex Environments" Remote Sensing 16, no. 23: 4360. https://doi.org/10.3390/rs16234360
APA StyleXu, J., Suo, Y., Jiang, Y., & Yang, Q. (2024). A Fast Algorithm for Matching AIS Trajectories with Radar Point Data in Complex Environments. Remote Sensing, 16(23), 4360. https://doi.org/10.3390/rs16234360