


A Likelihood-Based Triangulation Method for Uncertainties in Through-Water Depth Mapping



Abstract
1. Introduction
2. Related Works
3. Methodology
3.1. Proposed Likelihood Triangulation
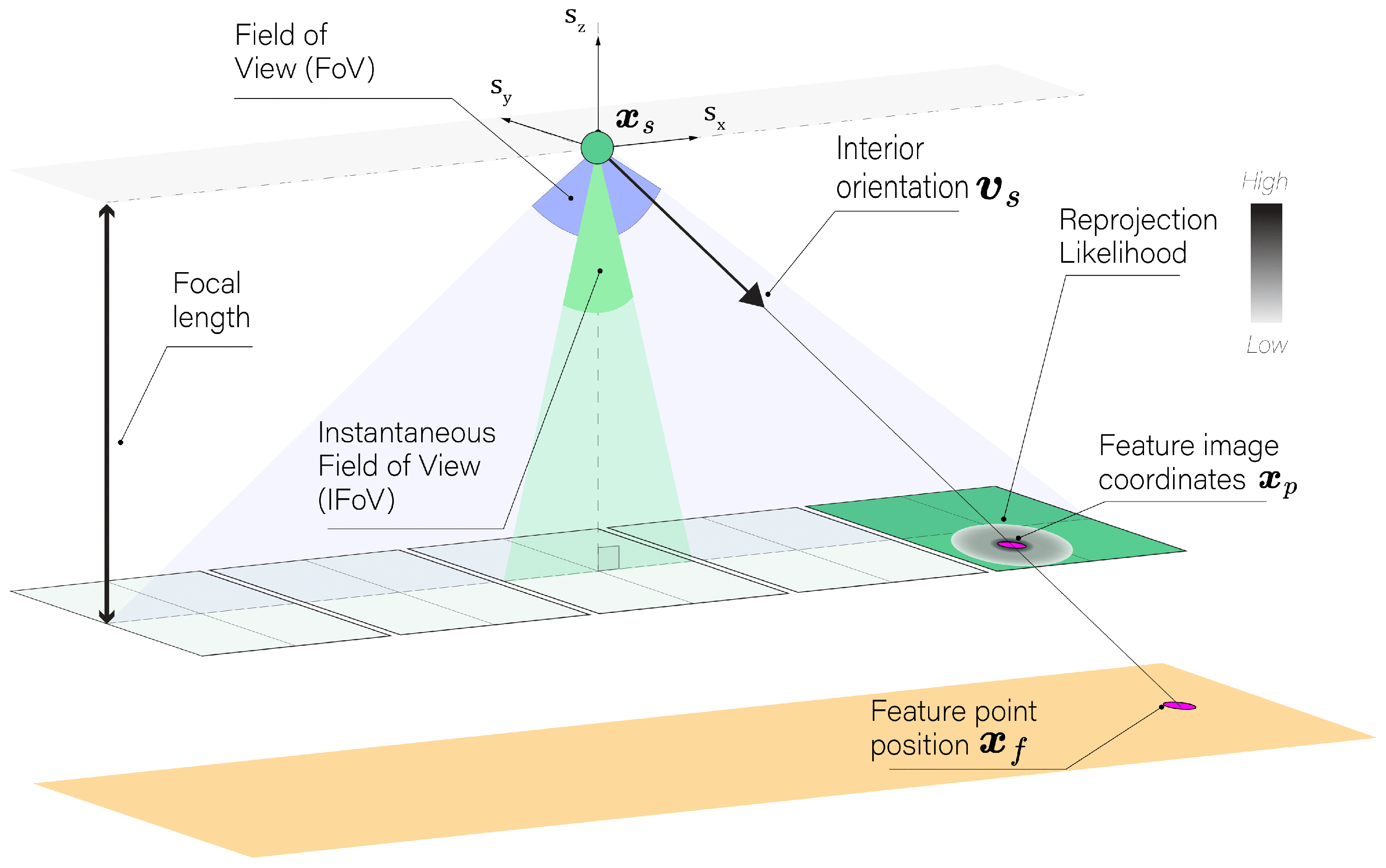
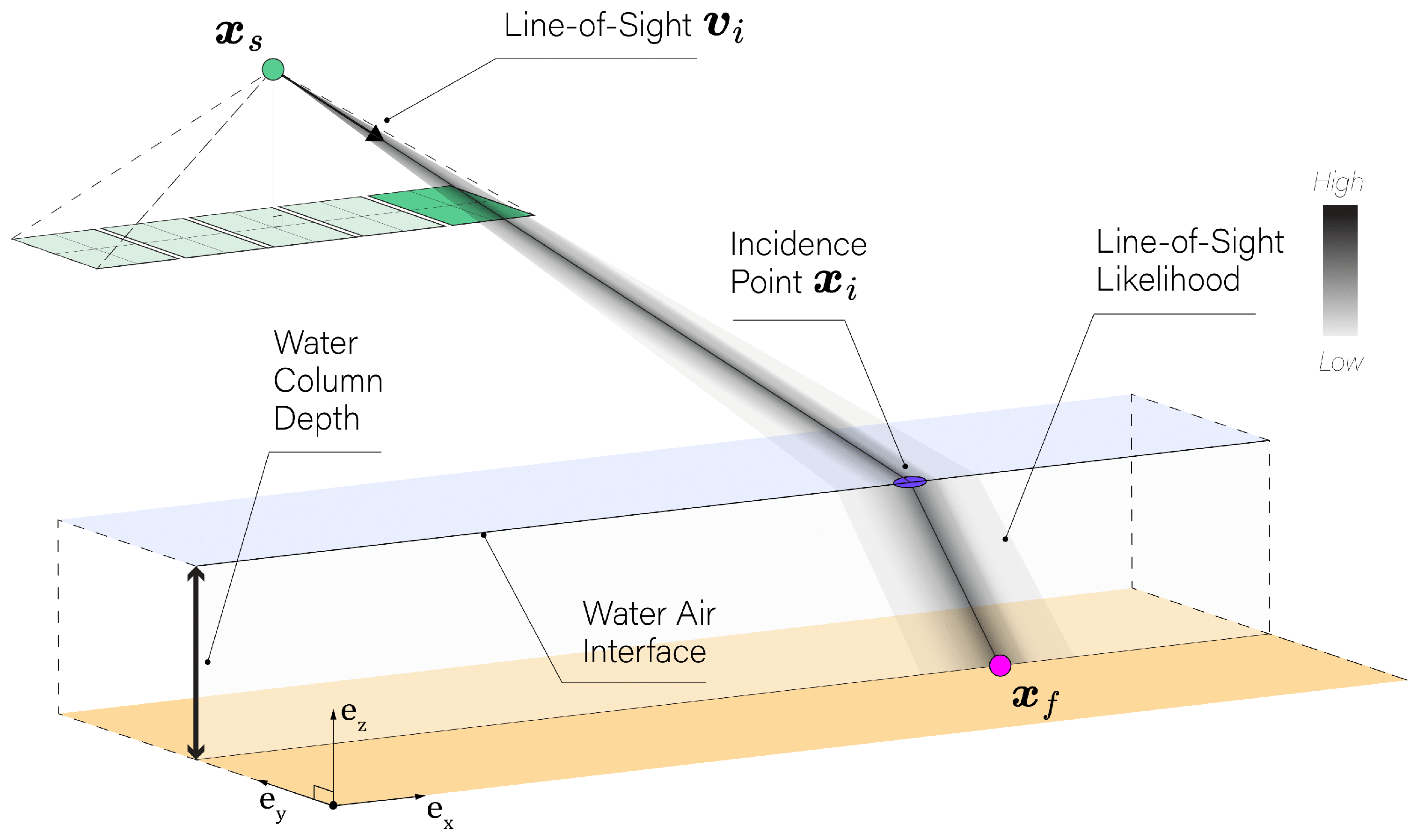
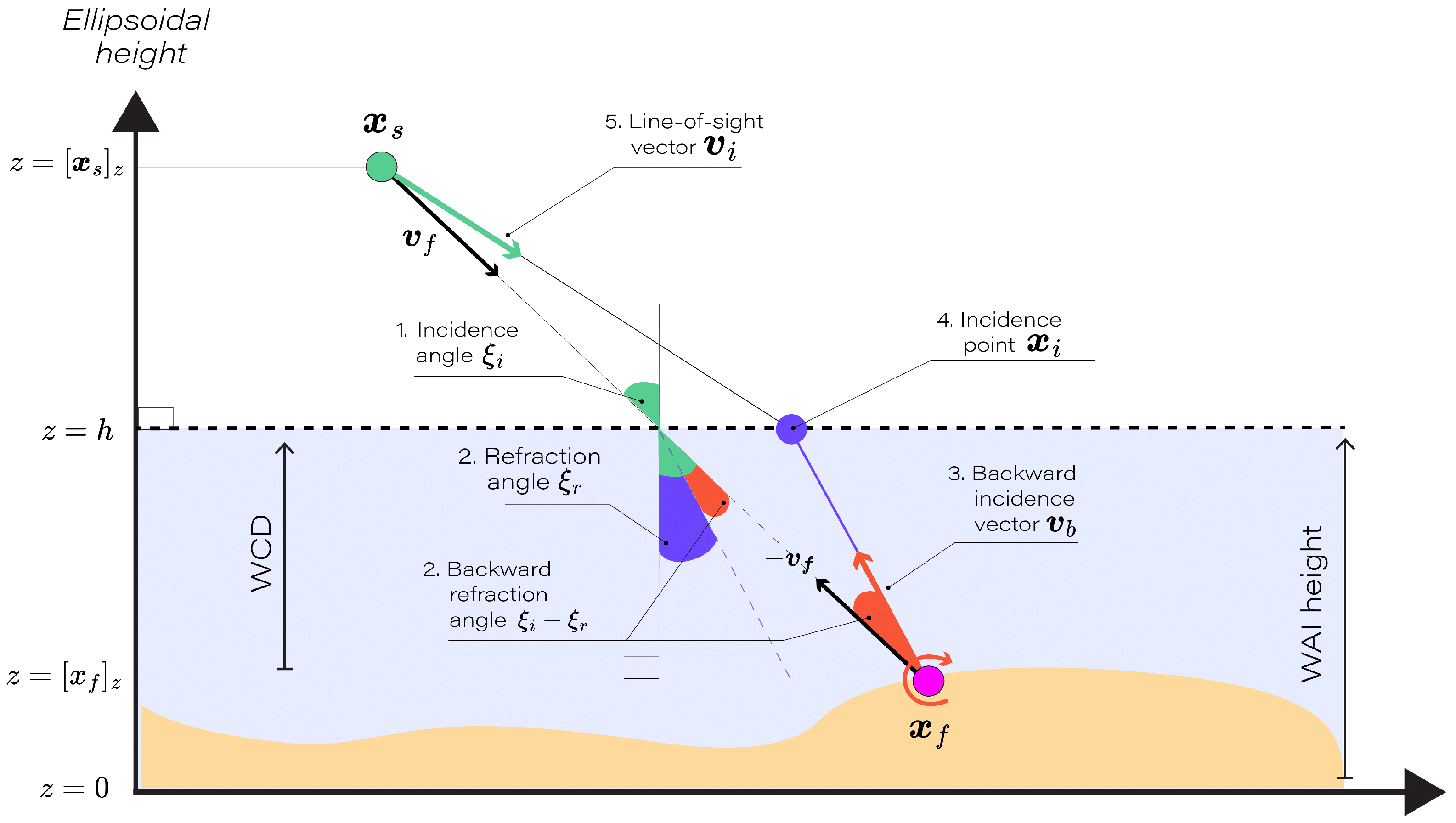
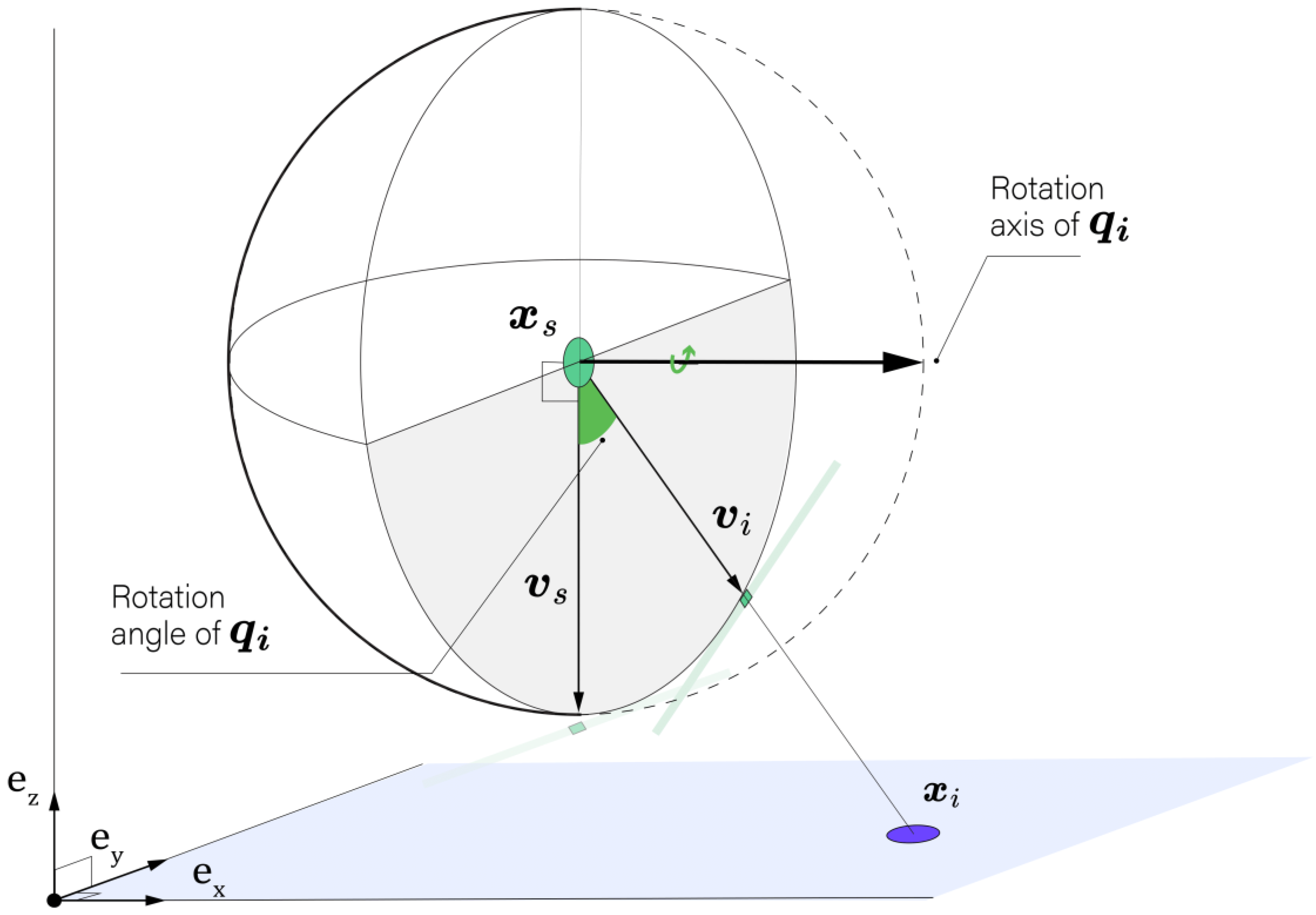
3.1.1. Line-of-Sight Modeling
- The incidence angle , the angle between the feature vector and the nadir , is calculated as follows:
- Using Snell’s Law, the refraction angle when transitioning from water to air is as follows:where n is the refractive index ratio, fixed at 1.33, representing the ratio of the speed of light in air to that in water. The incidence and refraction angles calculated in steps 1 and 2 are computed as if there was no refraction. These angles do not represent the actual incidence and refraction angles in the presence of refraction, but rather serve as proxies to determine the backward rotation necessary to model the refraction effect in the subsequent steps.
- The adjusted vector to refraction, a function of , , and the refractive index n, is computed by applying a rotation in the plane , with angle :
- The incidence point on the interface, where intercepts the water–air interface, is calculated as follows:where and are the vertical components of and , respectively.
- Finally, the line-of-sight vector , the normalized vector from to , is defined as follows:
3.1.2. Camera Pose Statistical Model
Camera Pose Data
Statistical Model
3.1.3. MLE-Based Triangulation
3.2. Uncertainty Evaluation
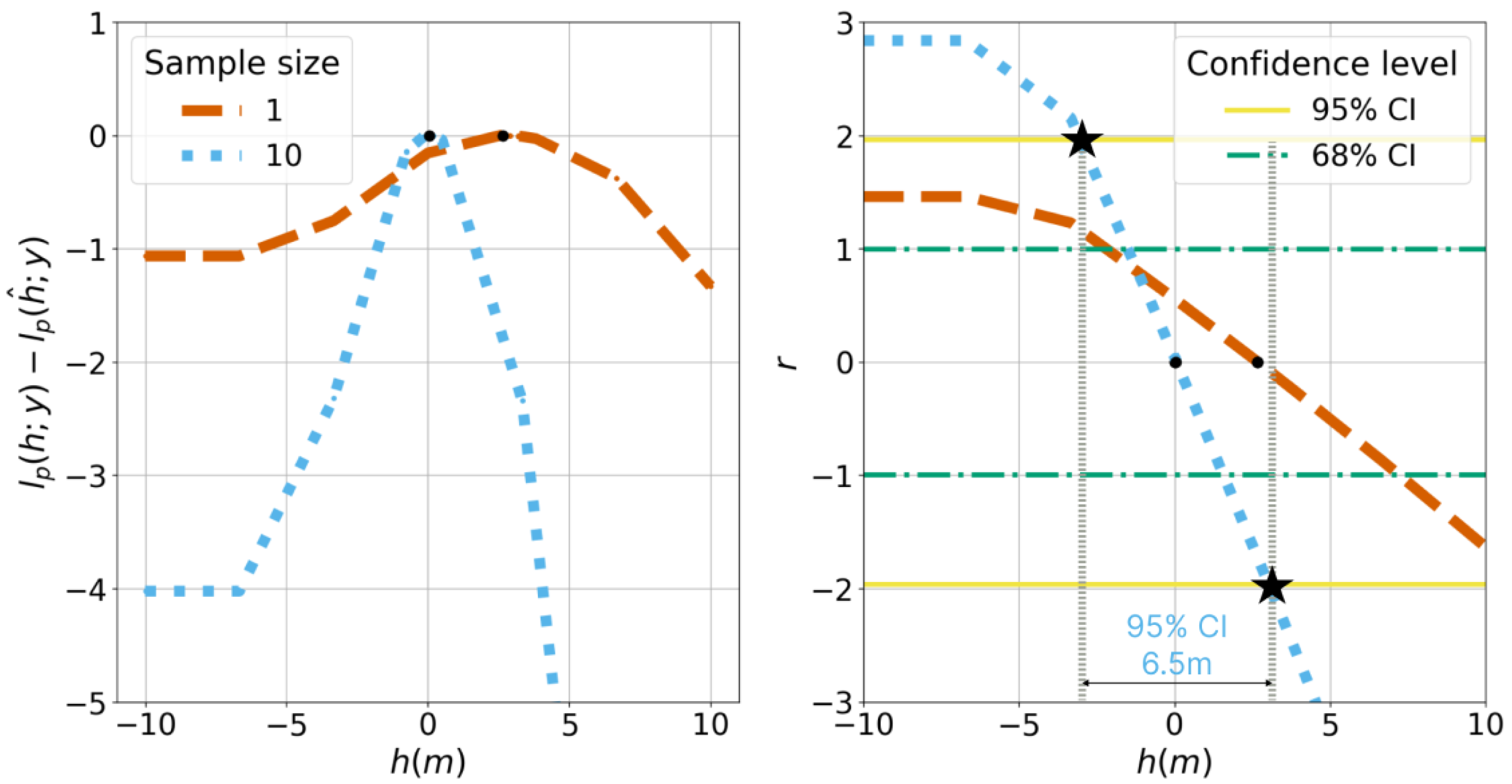
3.2.1. Profile Likelihood
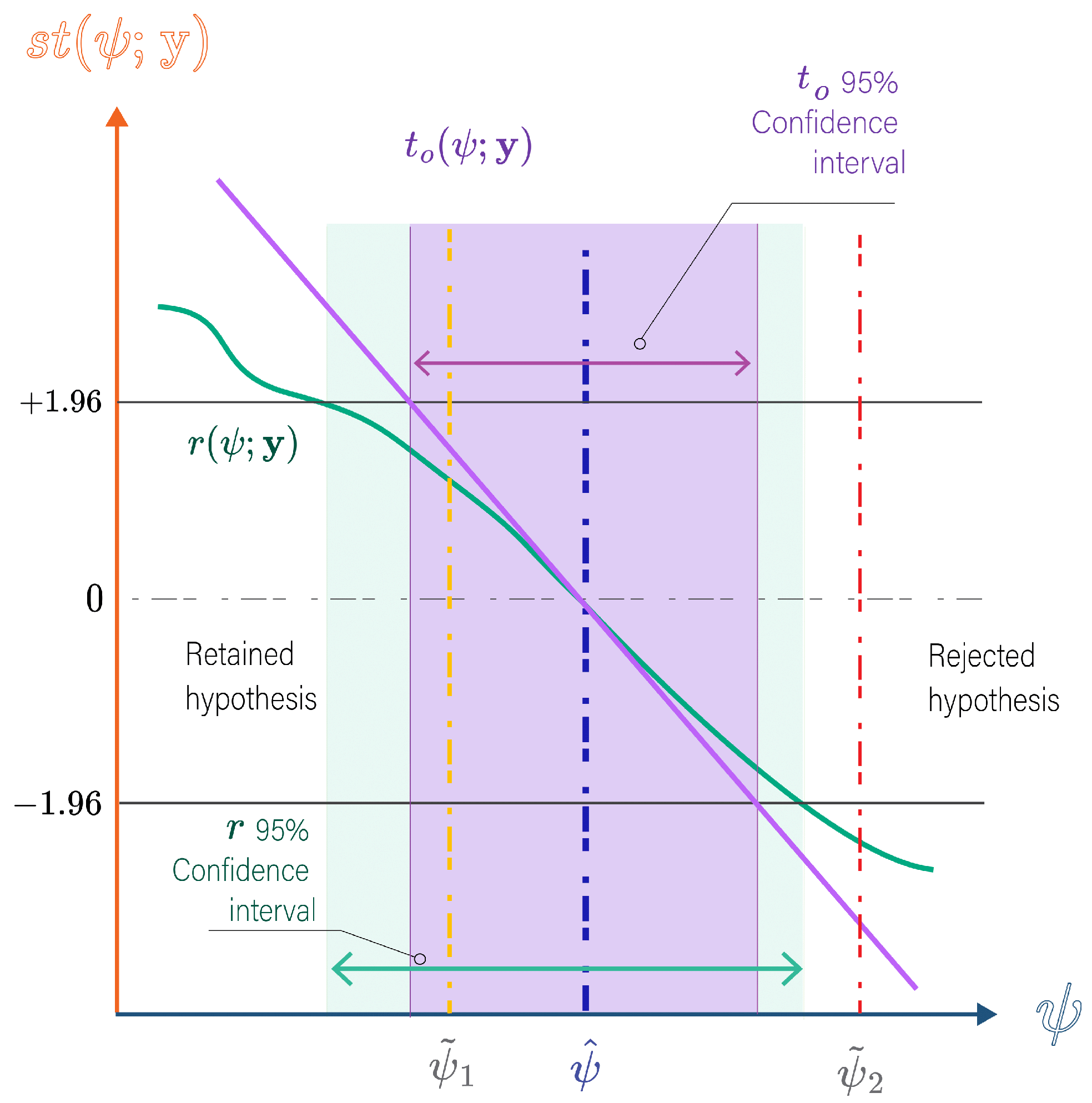
3.2.2. First-Order Statistical Tests
3.2.3. Evaluation of Confidence Interval Performance
4. Results
4.1. Simulated Experiments
4.2. Water Column Depth Inference
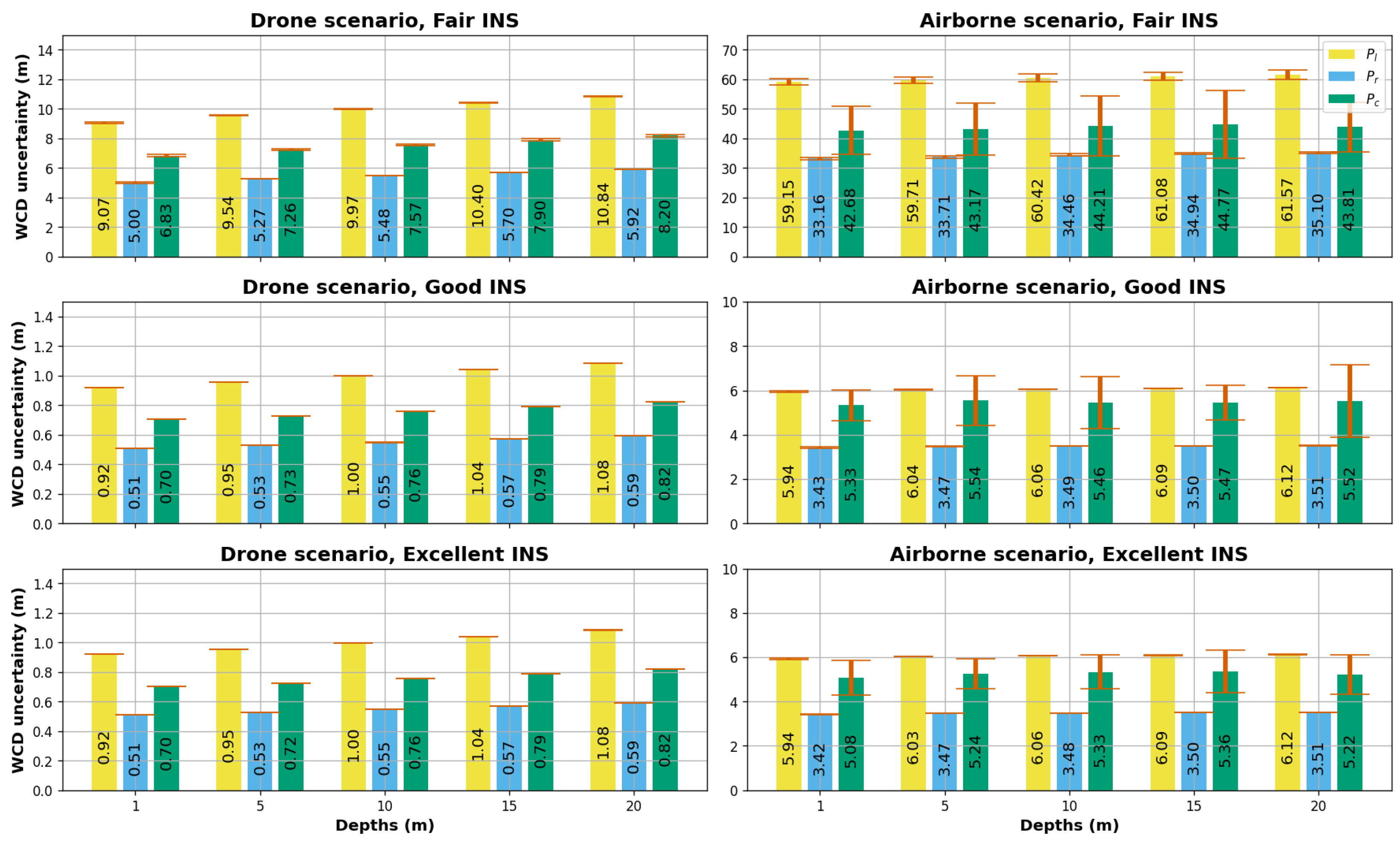
4.2.1. WCD Uncertainties
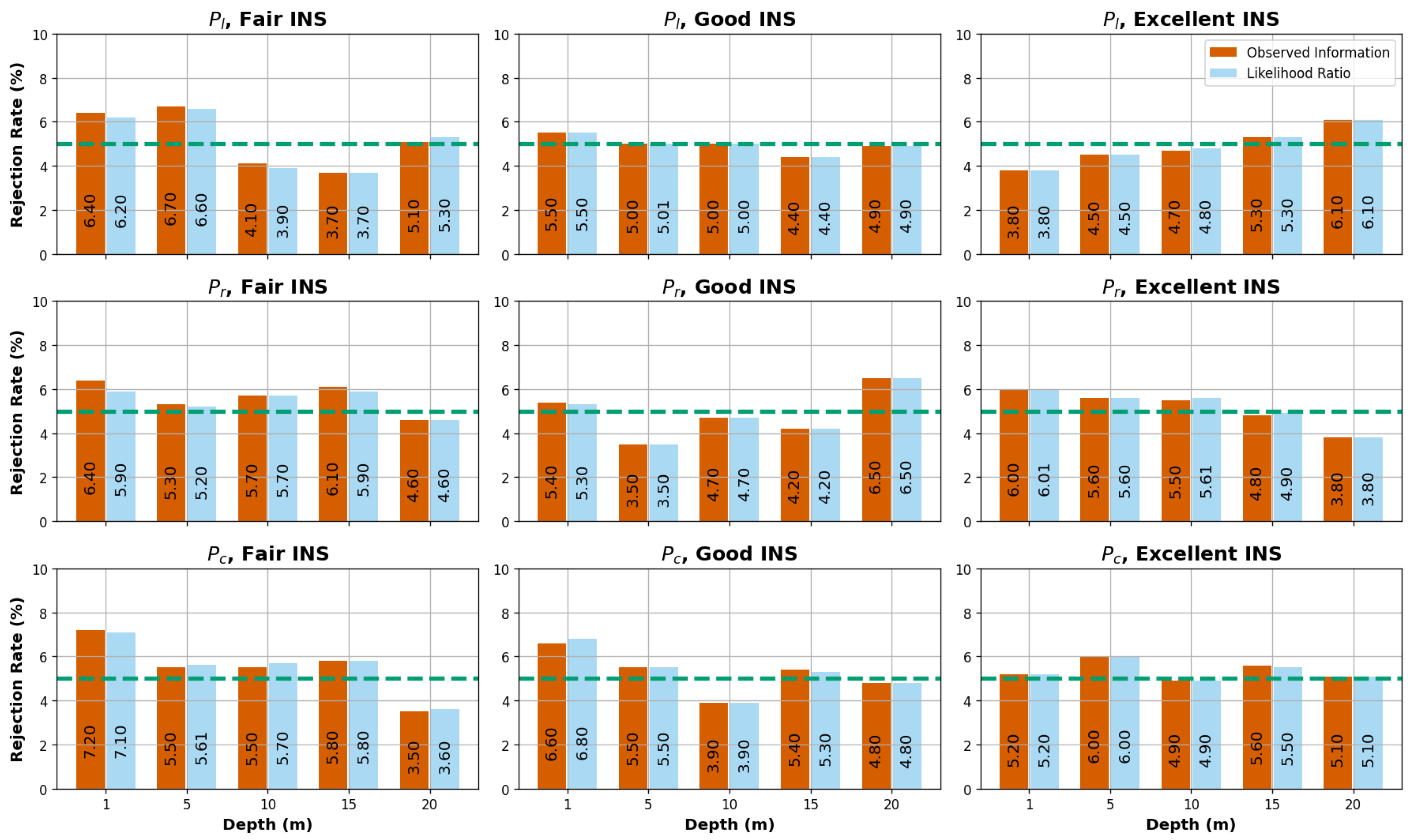
4.2.2. Evaluation of Uncertainty Metrics
4.3. Water–Air Interface Height Inference
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WCD | Water Column Depth |
| WAI | Water Air Interface |
| GCP | Ground Control Points |
| SfM | Structure from Motion |
| MVS | Multi-View Stereo |
| RPC | Rational Polynomial Coefficients |
| FoV | Field of View |
| IFoV | Instantaneous Field of View |
| SDB | Satellite-Derived Bathymetry |
| GNSS | Global Navigation Satellite System |
| INS | Inertial Navigation System |
| MLE | Maximum Likelihood Estimation |
| LS | Least Square |
| CI | Confidence Intervals |
| CL | Confidence Level |
Appendix A. Equivalence Between the Wald Test Based on the Expected Fisher Information and the Variance–Covariance Propagation Under Gaussian Errors
References
- Singh, G.; Cottrell, R.; Eddy, T.; Cisneros-Montemayor, A. Governing the Land-Sea Interface to Achieve Sustainable Coastal Development. Front. Mar. Sci. 2021, 8, 709947. [Google Scholar] [CrossRef]
- Martínez, M.; Intralawan, A.; Vázquez, G.; Pérez-Maqueo, O.; Sutton, P.; Landgrave, R. The coasts of our world: Ecological, economic and social importance. Ecol. Econ. 2007, 63, 254–272. [Google Scholar] [CrossRef]
- Pasquale, D.; Giovanni, B.R.; Vincenzo, P. Measurement for the Sea; Springer Series in Measurement Science and Technology Series Editors; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Lyzenga, D. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 379, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnolology Oceanogr. 2003, 48, 547–557. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef]
- Hedley, J.; Roelfsemab, C.; Koetzc, B.; Phinn, S. Capability of the Sentinel 2 mission for tropical coral reef mapping and coral bleaching detection. Remote Sens. Environ. 2012, 120, 145–155. [Google Scholar] [CrossRef]
- Cao, B.; Fang, Y.; Jiang, Z.; Gao, L.; Hu, H. Shallow water bathymetry from WorldView-2 stereo imagery using two-media photogrammetry. Eur. J. Remote Sens. 2019, 52, 506–521. [Google Scholar] [CrossRef]
- Mandlburger, G. Through-water dense image matching for shallow water bathymetry. Photogramm. Eng. Remote Sens. 2019, 85, 445–454. [Google Scholar] [CrossRef]
- Hodúl, M.; Bird, S.; Knudby, A.; Chénier, R. Satellite derived photogrammetric bathymetry. Isprs J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Murase, T.; Tanaka, M.; Tani, T.; Miyashita, Y.; Ohkawa, N.; Ishiguro, S.; Suzuki, Y.; Kayanne, H.; Yamano, H. A Photogrammetric Correction Procedure for Light Refraction Effects at a Two-Medium Boundary. Photogramm. Eng. Remote Sens. 2008, 74, 1129–1136. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Georgopoulos, A. Camera Constant in the Case of Two Media Photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 1–6. [Google Scholar] [CrossRef]
- JCGM. Evaluation of measurement data—Guide to the expression of uncertainty in measurement. Int. Organ. Stand. 2008, 50, 134. [Google Scholar]
- Dolloff, J.T. RPC uncertainty parameters: Generation, application, and effects. In Proceedings of the ASPRS Annual Convention, Sacramento, CA, USA, 19–23 March 2012; pp. 19–23. [Google Scholar]
- Dolloff, J.; Theiss, H. The Specification and Validation of Predicted Accuracy Capabilities for Commercial Satellite Imagery. In Proceedings of the ASPRS Annual Convention, Louisville, KY, USA, 23–28 March 2014. [Google Scholar]
- Slocum, R.K.; Wright, W.; Parrish, C.; Costa, B.; Sharr, M.; Battista, T.A. Guidelines for Bathymetric Mapping and Orthoisubsectionmage Generation Using sUAS and SfM, An Approach for Conducting Nearshore Coastal Mapping; NOAA technical memorandum NOS NCCOS 265, United States, National Ocean Service; National Centers for Coastal Ocean Science (U.S.); United States, National Oceanic and Atmospheric Administration; Coral Reef Conservation Program (U.S.): Silver Spring, MD, USA, 2019. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, A.; Hassan, M.A.; Qin, C. Assessing Through-Water Structure-from-Motion Photogrammetry in Gravel-Bed Rivers under Controlled Conditions. Remote Sens. 2022, 14, 5351. [Google Scholar] [CrossRef]
- Sims-Waterhouse, D.; Isa, M.; Piano, S.; Leach, R. Uncertainty model for a traceable stereo-photogrammetry system. Precis. Eng. 2020, 63, 1–9. [Google Scholar] [CrossRef]
- Kalacska, M.; Lucanus, O.; Sousa, L.; Vieira, T.; Arroyo-Mora, J.P. Freshwater Fish Habitat Complexity Mapping Using Above and Underwater Structure-From-Motion Photogrammetry. Remote Sens. 2018, 10, 1912. [Google Scholar] [CrossRef]
- Kiraci, A.C.; Toz, G. Theoretical analysis of positional uncertainty in direct georeferencing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 1221–1226. [Google Scholar] [CrossRef]
- Skarlatos, D.; Agrafiotis, P. A novel iterative water refraction correction algorithm for use in structure from motion photogrammetric pipeline. J. Mar. Sci. Eng. 2018, 6, 77. [Google Scholar] [CrossRef]
- Tewinkel, G.C. Water Depths from Aerial Photographs. Photogramm. Eng. 1963, 29, 1037–1042. [Google Scholar]
- Rofallski, R.; Luhmann, T. An Efficient Solution to Ray Tracing Problems in Multimedia Photogrammetry for Flat Refractive Interfaces. J. Photogramm. Remote Sens. Geoinf. Sci. 2022, 90, 37–54. [Google Scholar] [CrossRef]
- Mulsow, C. A Flexible Multi-media Bundle Approach. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Newcastle upon Tyne, UK, 21–24 June 2010; Volume XXXVIII, pp. 472–477. [Google Scholar]
- Nasiri, S.M.; Hosseini, R.; Moradi, H. The optimal triangulation method is not really optimal. Iet Image Process. 2023, 17, 2855–2865. [Google Scholar] [CrossRef]
- Bingham, C. An Antipodally Symmetric Distribution on the Sphere. Ann. Stat. 1974, 2, 1201–1225. [Google Scholar] [CrossRef]
- Brazzale, A.; Davison, A.; Reid, N. Applied Asymptotics: Case Studies in Small-Sample Statistics; Cambridge Series in Statistical and Probabilistic Mathematics; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Rinner, K. Problems of Two-Medium Photogrammetry. Photogramm. Eng. 1969, 35, 275–282. [Google Scholar]
- International Hydrographic Organization. International Hydrographic Organization Standards for Hydrographic Surveys S-44 Edition 6.0.0. Online Resource. Available online: https://iho.int/uploads/user/pubs/standards/s-44/S-44_Edition_6.1.0.pdf.pdf (accessed on 28 October 2024).
- Jay, S.; Guillaume, M.; Chami, M.; Audrey Minghelli, Y.D.; Lafrance, B.; Serfaty, V. Predicting minimum uncertainties in the inversion of ocean color geophysical parameters based on Cramer-Rao bounds. Opt. Express 2018, 26, A1–A18. [Google Scholar] [CrossRef] [PubMed]
- Sicot, G.; Ghannami, M.A.; Lennon, M.; Loyer, S.; Thomas, N. Likelihood Ratio statistic for inferring the uncertainty of satellite derived bathymetry. In IEEE WHISPER; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Kay, L.S.M. Fundamentals of Statistical Signal Processing: Estimation Theory. In Prentice Hall Signal Processing Series; Taylor & Francis: Oxfordshire, UK, 1993. [Google Scholar]
- Severini, T.A. Likelihood Methods in Statistics. In Oxford Statistical Series; Oxford University Press: Oxford, UK, 2000. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Parameter underlying the data (multidimensional) | |
| True value of the parameter | |
| Parameter of interest (scalar) | |
| Nuisance vector parameter (multidimensional) | |
| Observed data (multidimensional) | |
| Likelihood function | |
| Log-likelihood function | |
| Profile log-likelihood function | |
| Second derivative of the log likelihood with respect to | |
| Maximum likelihood estimate of given | |
| Partial observed Fisher information | |
| Wald statistic (observed) | |
| Signed root likelihood ratio statistic | |
| , | Significance level, confidence level (CL) |
| Interior orientation vector | |
| Feature vector | |
| Feature point position | |
| Incidence point position | |
| Line-of-sight vector | |
| Line-of-sight quaternion | |
| h | Water–air interface height parameter |
| n | Refractive index ratio |
| , | Incidence angle and refracted angle |
| Backward refraction angle | |
| Backward line-of-sight vector | |
| Water Column Depth (WCD) | |
| Nadir vector | |
| Parameter of camera position vector | |
| Measured camera position vector | |
| Variance–covariance matrix of camera position | |
| Measured line-of-sight quaternion | |
| Bingham orientation parameter | |
| Bingham concentration parameter |
| Feature Point | Base–Height Ratio (B/H) | Viewing Scenario |
|---|---|---|
| 0.36 | Crossing lines | |
| 0.36 | Parallel lines | |
| 0.72 | Parallel lines |
| Camera Pose Quality | Position Noise | Attitude Noise | |
|---|---|---|---|
| Rolling/Pitch | Yaw | ||
| Fair | 0.5 m | 0.1° | 0.1° |
| Good | 0.05 m | 0.01° | 0.1° |
| Excellent | 0.05 m | 0.01° | 0.01° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghannami, M.A.; Daniel, S.; Sicot, G.; Quidu, I. A Likelihood-Based Triangulation Method for Uncertainties in Through-Water Depth Mapping. Remote Sens. 2024, 16, 4098. https://doi.org/10.3390/rs16214098
Ghannami MA, Daniel S, Sicot G, Quidu I. A Likelihood-Based Triangulation Method for Uncertainties in Through-Water Depth Mapping. Remote Sensing. 2024; 16(21):4098. https://doi.org/10.3390/rs16214098
Chicago/Turabian StyleGhannami, Mohamed Ali, Sylvie Daniel, Guillaume Sicot, and Isabelle Quidu. 2024. "A Likelihood-Based Triangulation Method for Uncertainties in Through-Water Depth Mapping" Remote Sensing 16, no. 21: 4098. https://doi.org/10.3390/rs16214098
APA StyleGhannami, M. A., Daniel, S., Sicot, G., & Quidu, I. (2024). A Likelihood-Based Triangulation Method for Uncertainties in Through-Water Depth Mapping. Remote Sensing, 16(21), 4098. https://doi.org/10.3390/rs16214098