
A Validation of OLCI Sentinel-3 Water Products in the Baltic Sea and an Evaluation of the Effect of System Vicarious Calibration (SVC) on the Level-2 Water Products




Abstract
1. Introduction
2. Materials and Methods
2.1. Region of Interest (ROI)
2.2. Matchup Data
2.2.1. Validation Data
2.2.2. Satellite Data
Level-1 S3 EFR OLCI Data
Level-2 S3 WFR OLCI Data
OLCI Data Quality Flags
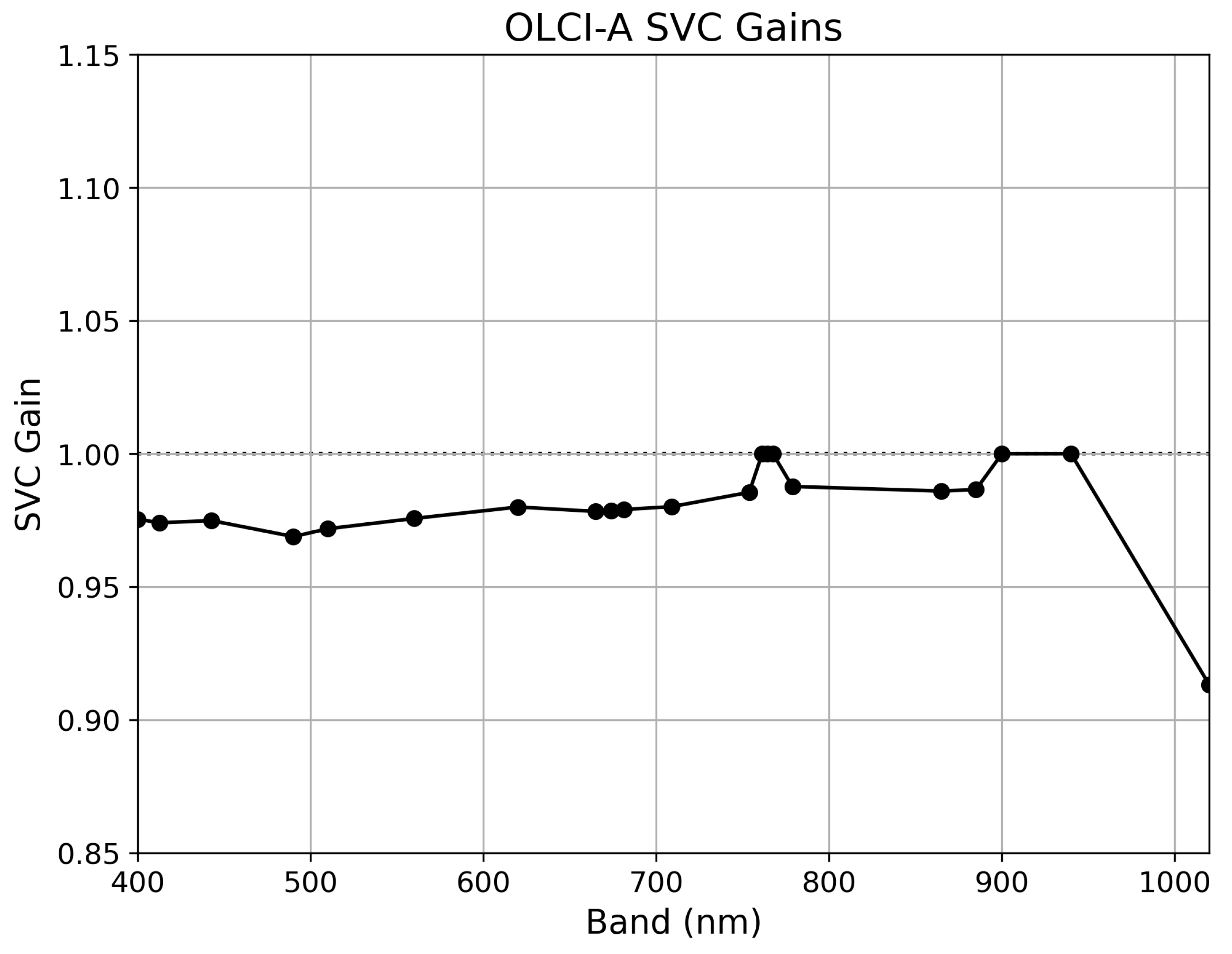
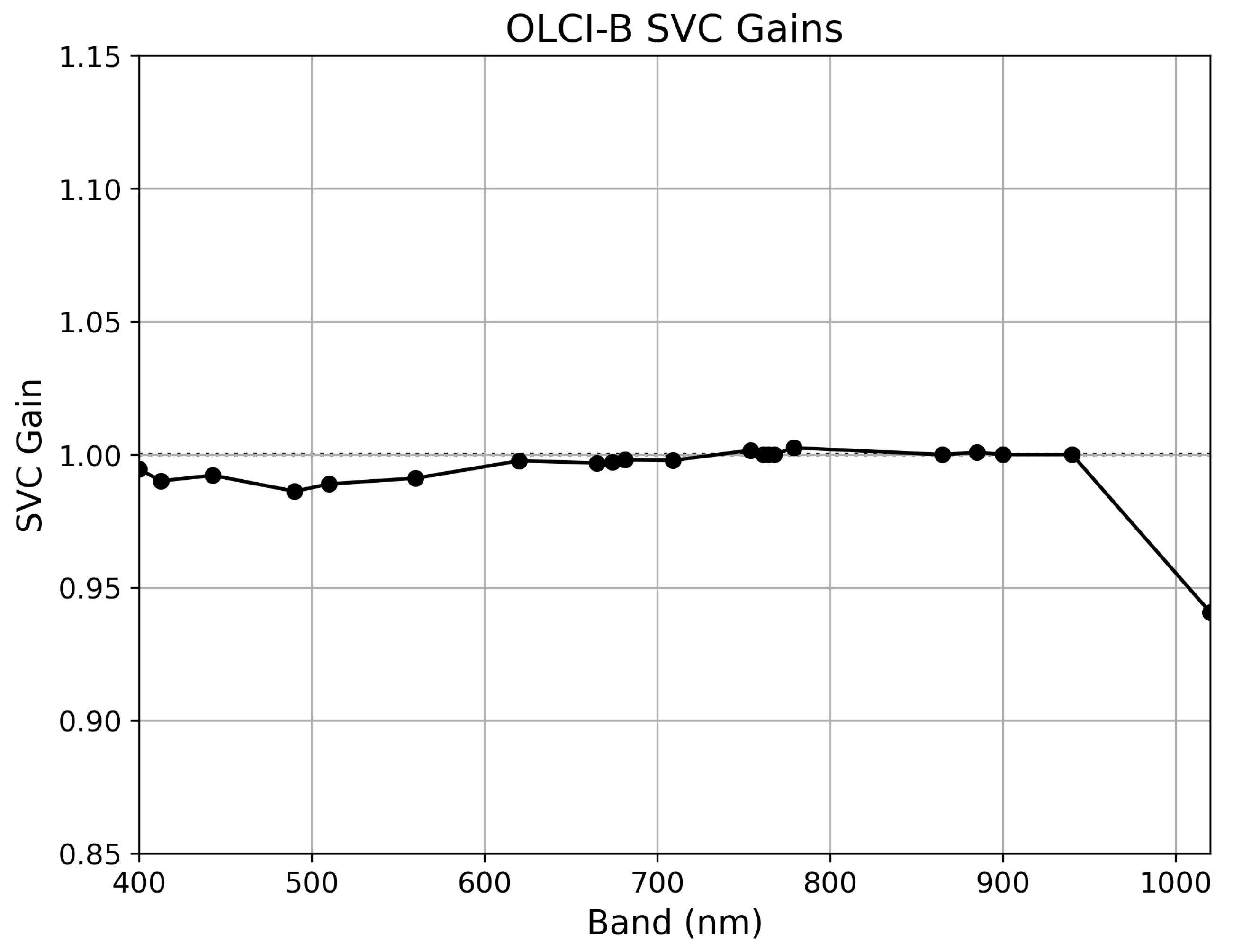
2.3. System Vicarious Calibration (SVC)
2.4. Case-2 Regional CoastColour (C2RCC)
2.4.1. C2RCC Parameterisation
2.4.2. Validation Difference Metrics
3. Results
4. Discussion
4.1. C2RCC v1.0 vs. v2.1 Non-SVC
4.2. C2RCC v2.1 SVC
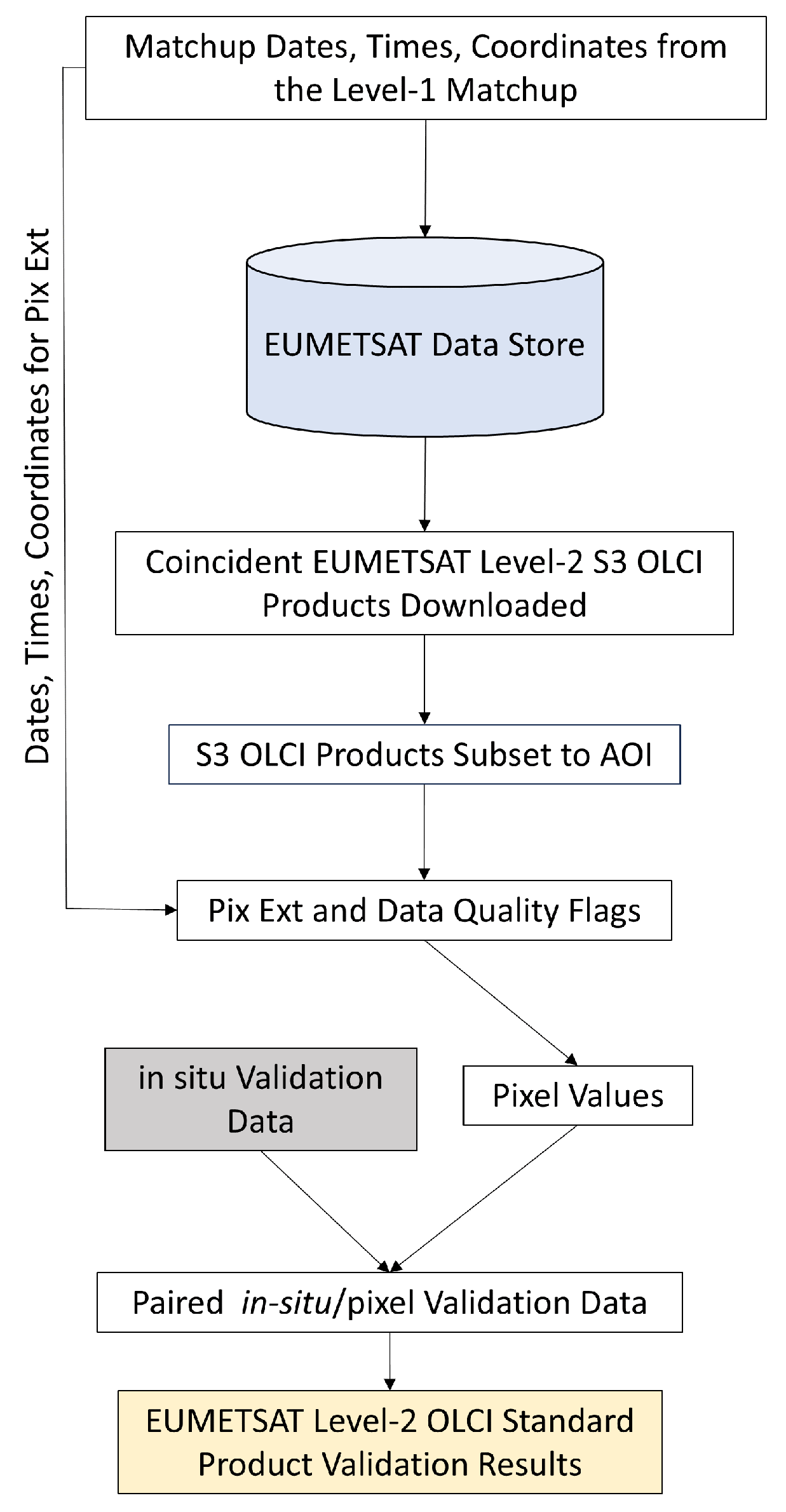
4.3. EUMETSAT Level-2 Products
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aiken, J.; Moore, G.F.; Hotligan, P.M. Remote Sensing of Oceanic Biology in Relation to Global Climate Change. J. Phycol. 1992, 28, 579–590. [Google Scholar] [CrossRef]
- Behrenfeld, M.J.; O’Malley, R.T.; Siegel, D.A.; McClain, C.R.; Sarmiento, J.L.; Feldman, G.C.; Milligan, A.J.; Falkowski, P.G.; Letelier, R.M.; Boss, E.S. Climate-driven trends in contemporary ocean productivity. Nature 2006, 444, 752–755. [Google Scholar] [CrossRef]
- Yang, J.; Gong, P.; Fu, R.; Zhang, M.; Chen, J.; Liang, S.; Xu, B.; Shi, J.; Dickinson, R. The role of satellite remote sensing in climate change studies. Nat. Clim. Chang. 2013, 3, 875–883. [Google Scholar] [CrossRef]
- Thomalla, S.J.; Nicholson, S.A.; Ryan-Keogh, T.J.; Smith, M.E. Widespread changes in Southern Ocean phytoplankton blooms linked to climate drivers. Nat. Clim. Chang. 2023, 13, 975–984. [Google Scholar] [CrossRef]
- Doerffer, R.; Sorensen, K.; Aiken, J. MERIS potential for coastal zone applications. Int. J. Remote Sens. 1999, 20, 1809–1818. [Google Scholar] [CrossRef]
- Kratzer, S.; Vinterhav, C. Improvement of MERIS level 2 products in Baltic Sea coastal areas by applying the Improved Contrast between Ocean and Land processor (ICOL)—Data analysis and validation. Oceanologia 2010, 52, 211–236. [Google Scholar] [CrossRef]
- Beltrán-Abaunza, J.; Kratzer, S.; Höglander, H. Using MERIS data to assess the spatial and temporal variability of phytoplankton in coastal areas. Int. J. Remote Sens. 2017, 38, 2004–2028. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Voss, K.J.; Johnson, B.C.; Franz, B.A.; Kwiatkowska, E.; Huot, J.P.; Wang, M.; Antoine, D. System vicarious calibration for ocean color climate change applications: Requirements for in situ data. Remote Sens. Environ. 2015, 159, 361–369. [Google Scholar] [CrossRef]
- Mazeran, C.; Ruescas, A. Ocean Colour System Vicarious Calibration Tool: Tool Documentation (DOC-TOOL). In Technical Report EUM/19/SVCT/D2; Issue: 1.0; EUMETSAT: Darmstadt, Germany, 2020; Available online: https://www.eumetsat.int/media/47502 (accessed on 26 September 2024).
- Gordon, H.R. Calibration requirements and methodology for remote sensors viewing the ocean in the visible. Remote Sens. Environ. 1987, 22, 103–126. [Google Scholar] [CrossRef]
- Sentinel-3 OLCI L2 report for baseline collection OL_L2M_003. In Technical Report EUM/RSP/REP/21/1211386; Issue: V2B; EUMETSAT: Darmstadt, Germany, 2021.
- Clark, D.K.; Yarbrough, M.A.; Feinholz, M.; Flora, S.; Broenkow, W.; Kim, Y.S.; Johnson, B.C.; Brown, S.W.; Yuen, M.; Mueller, J.L. MOBY, a radiometric buoy for performance monitoring and vicarious calibration of satellite ocean color sensors: Measurement and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation—Volume 6: Special Topics in Ocean Optics Protocols and Appendices; National Aeronautics and Space Administration, Goddard Space Flight Center: Greenbelt, MD, USA, 2003. [Google Scholar]
- Giannini, F.; Hunt, B.P.; Jacoby, D.; Costa, M. Performance of OLCI Sentinel-3A satellite in the Northeast Pacific coastal waters. Remote Sens. Environ. 2021, 256, 112317. [Google Scholar] [CrossRef]
- Kwiatkowska, E.; Mazeran, C.; Brockmann, C.; Ruddick, K.; Voss, K.; Zagolski, F.; Antoine, D.; Bialek, A.; Brando, V.; Donlon, C.; et al. Requirements for Copernicus Ocean Colour Vicarious Calibration Infrastructure. In Technical Report SOLVO/EUM/16/VCA/D8; Issue: 1.3; EUMETSAT: Darmstadt, Germany, 2017; Available online: https://www.eumetsat.int/media/42725 (accessed on 26 September 2024).
- Kyryliuk, D.; Kratzer, S. Evaluation of Sentinel-3A OLCI products derived using the Case-2 Regional CoastColour processor over the Baltic Sea. Sensors 2019, 19, 3609. [Google Scholar] [CrossRef] [PubMed]
- Kratzer, S.; Plowey, M. Integrating mooring and ship-based data for improved validation of OLCI chlorophyll-a products in the Baltic Sea. Int. J. Appl. Earth Obs. Geoinf. 2021, 94, 102212. [Google Scholar] [CrossRef]
- Kratzer, S.; Moore, G. Inherent Optical Properties of the Baltic Sea in Comparison to Other Seas and Oceans. Remote Sens. 2018, 10, 418. [Google Scholar] [CrossRef]
- Kowalczuk, P.; Stedmon, C.A.; Markager, S. Modeling absorption by CDOM in the Baltic Sea from season, salinity and chlorophyll. Mar. Chem. 2006, 101, 1–11. [Google Scholar] [CrossRef]
- Kutser, T.; Paavel, B.; Metsamaa, L.; Vahtmäe, E. Mapping coloured dissolved organic matter concentration in coastal waters. Int. J. Remote Sens. 2009, 30, 5843–5849. [Google Scholar] [CrossRef]
- Soja-Woźniak, M.; Craig, S.E.; Kratzer, S.; Wojtasiewicz, B.; Darecki, M.; Jones, C.T. A novel statistical approach for ocean colour estimation of inherent optical properties and cyanobacteria abundance in optically complex waters. Remote Sens. 2017, 9, 343. [Google Scholar] [CrossRef]
- Kirk, J.T.O. Light and Photosynthesis in Aquatic Ecosystems, 3rd ed.; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- EMODnet Mean Depth Bathymetry. Available online: https://emodnet.ec.europa.eu/en/bathymetry (accessed on 2 August 2024).
- EEA Europe Coastline Shapefile. Available online: https://www.eea.europa.eu/data-and-maps/data/eea-coastline-for-analysis-1/gis-data/europe-coastline-shapefile (accessed on 2 August 2024).
- Natural Earth. Admin 0-Countries. Available online: https://aeronet.gsfc.nasa.gov/new_web/ocean_color.html (accessed on 2 August 2024).
- Stockholm, Sweden Polygon. Available online: https://cartographyvectors.com/map/1331-stockholm-sweden (accessed on 2 August 2024).
- Parsons, T.R.; Maita, Y.; Lalli, C. A Manual of Chemical and Biological Methods for Seawater Analysis; Elsevier: Amsterdam, The Netherlands, 1984; p. 173. [Google Scholar]
- Jeffrey, S.W.; Mantoura, R.F.C.; Wright, S. Phytoplankton Pigments in Oceanography: Guidelines to Modem Methods, Appendix F; UNESCO Publishing: Paris, France, 1997; p. 661. [Google Scholar]
- Kratzer, S.; Harvey, E.T.; Canuti, E. International Intercomparison of In Situ Chlorophyll-a Measurements for Data Quality Assurance of the Swedish Monitoring Program. Front. Remote Sens. 2022, 3, 866712. [Google Scholar] [CrossRef]
- Strickland, J.; Parsons, T. A Practical Handbook of Seawater Analysis, 2nd ed.; Fisheries Research Board of Canada: Ottawa, ON, Canada, 1972; p. 310. [Google Scholar] [CrossRef]
- Doerffer, R. Protocols for the Validation of MERIS Water Products; PO-TN-MEL-GS-0043; GKSS: Geesthacht, Germany, 2002. [Google Scholar]
- Kari, E. Light Conditions in Seasonally Ice-Covered Waters. Ph.D. Thesis, Stockholm University, Stockholm, Sweden, 2017. [Google Scholar]
- Beltrán-Abaunza, J.M.; Kratzer, S.; Brockmann, C. Evaluation of MERIS products from Baltic Sea coastal waters rich in CDOM. Ocean Sci. 2014, 10, 377–396. [Google Scholar] [CrossRef]
- Karlsson, K. A 10 year cloud climatology over Scandinavia derived from NOAA Advanced very High Resolution Radiometer imagery. Int. J. Climatol. 2003, 23, 1023–1044. [Google Scholar] [CrossRef]
- Reinart, A.; Kutser, T. Comparison of different satellite sensors in detecting cyanobacterial bloom events in the Baltic Sea. Remote Sens. Environ. 2006, 102, 74–85. [Google Scholar] [CrossRef]
- Recommendations for Sentinel-3 OLCI Ocean Colour Product Validations in Comparison with In-Situ Measurements—Matchup Protocols; EUM/SEN3/DOC/19/1092968; Issue: V8B; EUMETSAT: Darmstadt, Germany, 2022.
- SentinelSat API. Available online: https://sentinelsat.readthedocs.io/en/stable/ (accessed on 2 August 2024).
- Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/ (accessed on 2 August 2024).
- Copernicus Data Space Ecosystem. Available online: https://dataspace.copernicus.eu/ (accessed on 2 August 2024).
- EUMETSAT Data Store. Available online: https://user.eumetsat.int/data-access/data-store (accessed on 2 August 2024).
- Cazzaniga, I.; Zibordi, G.; Melin, F.; Kwiatkowska, E.; Talone, M.; Dessailly, D.; Gossn, J.I.; Muller, D. Evaluation of OLCI Neural Network Radiometric Water Products. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1503405. [Google Scholar] [CrossRef]
- Schiller, H.; Doerffer, R. Neural network for emulation of an inverse model operational derivation of Case II water properties from MERIS data. Int. J. Remote Sens. 1999, 20, 1735–1746. [Google Scholar] [CrossRef]
- Doerffer, R.; Schiller, H. The MERIS Case 2 water algorithm. Int. J. Remote Sens. 2007, 28, 517–535. [Google Scholar] [CrossRef]
- Attila, J.; Koponen, S.; Kallio, K.; Lindfors, A.; Kaitala, S.; Ylöstalo, P. MERIS Case II water processor comparison on coastal sites of the northern Baltic Sea. Remote Sens. Environ. 2013, 128, 138–149. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Peters, M.; Kerstin, S.; Embacher, S.; Ruescas, A. Evolution of the C2RCC Neural Network for Sentinel 2 and 3 for the Retrieval of Ocean Colour Products in Normal and Extreme Optically Complex Waters. In Living Planet Symposium; Ouwehand, L., Ed.; ESA Special Publication: Paris, France, 2016; Volume 740, p. 54. [Google Scholar]
- Kratzer, S.; Kyryliuk, D.; Brockmann, C. Inorganic suspended matter as an indicator of terrestrial influence in Baltic Sea coastal areas—Algorithm development and validation, and ecological relevance. Remote Sens. Environ. 2020, 237, 111609. [Google Scholar] [CrossRef]
- Data Base of the EU MAST Project (MAS3-CT97-0087) COLORS: Coastal Region Long-Term Measurements for Colour Remote Sensing Development and Validation. Available online: http://databases.eucc-d.de/plugins/background/index.php (accessed on 2 August 2024).
- Cristina, S.; Goela, P.; Icely, J.; Newton, A.; Fragoso, B. Assessment of water-leaving reflectances of oceanic and coastal waters using MERIS satellite products off the southwest coast of Portugal. J. Coast. Res. 2009, 1479–1483. [Google Scholar]
- Morel, A.; Prieur, L. Analysis of variations in ocean color1. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Ligi, M.; Kutser, T.; Kallio, K.; Attila, J.; Koponen, S.; Paavel, B.; Soomets, T.; Reinart, A. Testing the performance of empirical remote sensing algorithms in the Baltic Sea waters with modelled and in situ reflectance data. Oceanologia 2017, 59, 57–68. [Google Scholar] [CrossRef]
- Mazeran, C. (SOLVO, Antibes, France). Personal communication, 2024.
- D’Alimonte, D.; Zibordi, G.; Melin, F. A Statistical Method for Generating Cross-Mission Consistent Normalized Water-Leaving Radiances. IEEE Trans. Geosci. Remote Sens. 2008, 46, 4075–4093. [Google Scholar] [CrossRef]
- Mélin, F.; Zibordi, G. Vicarious calibration of satellite ocean color sensors at two coastal sites. Appl. Opt. 2010, 49, 798. [Google Scholar] [CrossRef]
- AErosol RObotic NETwork—Ocean Color (AERONET-OC) Program. Available online: https://www.naturalearthdata.com/downloads/10m-cultural-vectors/ (accessed on 2 August 2024).
- Bulgarelli, B.; Zibordi, G. On the detectability of adjacency effects in ocean color remote sensing of mid-latitude coastal environments by SeaWiFS, MODIS-A, MERIS, OLCI, OLI and MSI. Remote Sens. Environ. 2018, 209, 423–438. [Google Scholar] [CrossRef] [PubMed]
- Santer, R.; Zagolski, F. ICOL: Improve Contrast Between Ocean and Land; ATBD–MERIS level-1C; Rev. 1, Rep. D6 (1); University Littoral: Dunkerque, France, 2009. [Google Scholar]
- Sterckx, S.; Knaeps, E.; Ruddick, K. Detection and correction of adjacency effects in hyperspectral airborne data of coastal and inland waters: The use of the near infrared similarity spectrum. Int. J. Remote Sens. 2011, 32, 6479–6505. [Google Scholar] [CrossRef]
- Sterckx, S.; Knaeps, S.; Kratzer, S.; Ruddick, K. SIMilarity Environment Correction (SIMEC) applied to MERIS data over inland and coastal waters. Remote Sens. Environ. 2015, 157, 96–110. [Google Scholar] [CrossRef]
- Steinmetz, F.; Ramon, D. Sentinel-2 MSI and Sentinel-3 OLCI consistent ocean colour products using POLYMER. In Remote Sensing of the Open and Coastal Ocean and Inland Waters; Frouin, R.J., Murakami, H., Eds.; SPIE: Bellingham, WA, USA, 2018; pp. 46–55. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OLCI Product | Time Window | No. OLCI Matchup Products | No. Matchup Samples | |
|---|---|---|---|---|
| Before Data Quality Flags | ||||
| OLCI Level-1 | ±2 h | 180 | 407 | |
| ±3 h | 190 | 558 | ||
| OLCI Level-2 | ±2 h | 102 | 256 | |
| ±3 h | 109 | 357 | ||
| After Data Quality Flags | ||||
| C2RCC v1.0 (OLCI Level-1) | ±2 h | 70 | 135 | |
| ±3 h | 82 | 180 | ||
| C2RCC v2.1 (OLCI Level-1) | ±2 h | 70 | 127 | |
| ±3 h | 86 | 170 | ||
| C2RCC v2.1 (OLCI Level-1) SVC | ±2 h | 72 | 131 | |
| ±3 h | 86 | 172 | ||
| EUMETSAT Level-2 (OLCI Level-2) | ±2 h | 80 | 133 | |
| ±3 h | 96 | 181 |
| OLCI Quality Flags Tested | Final Quality Flags |
|---|---|
| && !quality_flags.land | c2rcc_flags.Valid_PE |
| && !quality_flags.bright | && !c2rcc_flags.Cloud_risk |
| && !quality_flags.straylight_risk | && !c2rcc_flags.Rhow_OOS |
| && !quality_flags.invalid | && !c2rcc_flags.Rtosa_OSS |
| && !quality_flags.cosmetic | && !quality_flags.sun_glint_risk |
| && !quality_flags.sun_glint_risk | |
| && !quality_flags.dubious |
| EUMETSAT Standard Products Quality Flags |
|---|
| WQSF_lsb.WATER |
| AND NOT WQSF_lsb.INVALID |
| AND NOT WQSF_lsb.LAND |
| AND NOT WQSF_lsb.COSMETIC |
| AND NOT WQSF_lsb.SUSPECT |
| AND NOT WQSF_lsb.CLOUD |
| AND NOT WQSF_lsb.CLOUD_AMBIGUOUS |
| AND NOT WQSF_lsb.CLOUD_MARGIN |
| AND NOT WQSF_lsb.SNOW_ICE |
| AND NOT WQSF_lsb.HISOLZEN |
| AND NOT WQSF_lsb.SATURATED |
| AND NOT WQSF_lsb.HIGHGLINT |
| AND NOT WQSF_lsb.OCNN_FAIL |
| Output Level-2 C2RCC OLCI Products | ||
|---|---|---|
| Product | Description | Unit |
| Reflectances | ||
| Rtoa 400–1020 nm | Top-of-atmosphere reflectance | |
| Rrs 400–1020 nm | Atmospherically corrected angular dependent remote sensing reflectances | sr−1 |
| Rhow 400–1020 nm | Normalized water-leaving reflectances | |
| Diffuse attenuation coefficient | ||
| kd489 | Irradiance attenuation coefficient at 489 nm | m−1 |
| kdmin | Mean irradiance attenuation coefficient at the three bands with minimum kd | m−1 |
| kd_z90max | Depth of the water column from which 90% of the water-leaving irradiance comes from (1/kdmin) | m |
| Inherent optical properties | ||
| iop_apig | Absorption coefficient of phytoplankton pigments at 443 nm | m−1 |
| iop_adet | Absorption coefficient of detritus at 443 nm | m−1 |
| iop_agelb | Absorption coefficient of Gelbstoff at 443 nm | m−1 |
| iop_bpart | Scattering coefficient of marine particles at 443 nm | m−1 |
| iop_bwit | Scattering coefficient of white particles at 443 nm | m−1 |
| iop_adg | Detritus + Gelbstoff absorption at 443 nm (iop_adet + iop_agelb) | m−1 |
| iop_atot | Phytoplankton + detritus + Gelbstoff absorption at 443 nm (iop_apig + iop_adet + iop_agelb) | m−1 |
| iop_btot | Total particle scattering at 443 nm (iop_bpart + iop_bwit) | m−1 |
| Concentrations | ||
| conc_tsm | Total suspended matter dry weight concentration (v1.0: TSM = iop_bpart × 0.986 + iop_bwit × 1.72; v2.1: TSM = TSMfac × iop_btotTSMexp) | gm−3 |
| conc_chl | Chlorophyll concentration (pow (iop_apig, 1.04) × 21.0) | mg m−3 |
| C2RCC OLCI Processing Parameters | |||
|---|---|---|---|
| v1.0 Reg Adap | v2.1 Def | v2.1 Reg Adap | |
| Valid-pixel expression | default | default | default |
| Salinity | 6.5 | 6.5 | 6.5 |
| Temperature | 5, 15 * | 5, 15 * | 5, 15 * |
| Ozone | 330 | 330 | 330 |
| Air pressure | 1000 | 1000 | 1000 |
| TSM factor bpart (v1.0) | 0.986 | ||
| TSM factor bwit (v1.0) | 1.72 | ||
| TSM factor (v2.1) | 1.06 | 1.212 | |
| TSM exponent (v2.1) | 0.942 | 0.686 | |
| CHL exponent | 1.04 | 1.04 | 1.04 |
| CHL Factor | 21 | 21 | 21 |
| Threshold rtosa OOS | 0.05 | 0.01 ** | 0.01 ** |
| Threshold AC reflectances OOS | 0.1 | 0.15 ** | 0.15 ** |
| Threshold for cloud flag on transmittance down @865 | 0.955 | 0.955 | 0.955 |
| Atmospheric aux data path | default | default | default |
| Alternative NN path | default | default | default |
| Output AC reflectances as Rrs instead of rhow | On | On | On |
| Derive water reflectance from path radiance and transmittance | Off | Off | Off |
| Use ECMWF aux data of source product | On | On | On |
| Output TOA reflectance | On | On | On |
| Output gas-corrected TOSA reflectance | Off | Off | Off |
| Output gas-corrected TOSA reflectances of auto NN | Off | Off | Off |
| Output path radiance reflectance | Off | Off | Off |
| Output downward transmittance | Off | Off | Off |
| Output upward transmittance | Off | Off | Off |
| Output atmospherically corrected angular dependent reflectances | On | On | On |
| Output normalized water-leaving reflectance | On | On | On |
| Output of out-of-scope values | Off | Off | Off |
| Output of irradiance attenuation coefficients | On | On | On |
| Output uncertainties | On | On | On |
| v1.0 Reg Adap | v2.1 Default | v2.1 Default SVC | v2.1 Reg Adap | v2.1 Reg Adap SVC | |
|---|---|---|---|---|---|
| TSM/conc_tsm (±2 h) | |||||
| Pearson’s r | 0.64 | 0.87 | 0.74 | 0.84 | 0.72 |
| MNB | 85% | 144% | 182% | 135% | 158% |
| RMSD | 152% | 202% | 251% | 179% | 209% |
| MAPD/APD | 105% | 151% | 186% | 140% | 161% |
| N= | 47 | 39 | 41 | 39 | 41 |
| Val Range (g m3) | 0.28–6.17 | 0.28–6.17 | 0.28–6.17 | 0.28–6.17 | 0.28–6.17 |
| TSM/conc_tsm (±3 h) | |||||
| Pearson’s r | 0.65 | 0.87 | 0.68 | 0.85 | 0.66 |
| MNB | 92% | 146% | 188% | 133% | 162% |
| RMSD | 164% | 202% | 258% | 176% | 212% |
| MAPD/APD | 111% | 151% | 192% | 137% | 165% |
| N= | 66 | 59 | 59 | 59 | 59 |
| Val Range (g m3) | 0.28–6.17 | 0.28–6.57 | 0.28–6.17 | 0.28–6.57 | 0.28–6.17 |
| v1.0 (±2 h) | v1.0 (±3 h) | v2.1 (±2 h) | v2.1 SVC (±2 h) | v2.1 (±3 h) | v2.1 SVC (±3 h) | |
|---|---|---|---|---|---|---|
| Chl-a/conc_chl | ||||||
| Pearson’s r | 0.49 | 0.47 | 0.68 | 0.4 | 0.64 | 0.4 |
| MNB | −15% | −20% | 17% | 77% | 15% | 67% |
| RMSD | 67% | 66% | 57% | 194% | 56% | 174% |
| MAPD/APD | 56% | 56% | 45% | 95% | 43% | 84% |
| N | 128 | 171 | 120 | 125 | 161 | 164 |
| Val Range (μg L−1) | 1.09–28.58 | 1.07–28.58 | 1.09–28.58 | 1.02–28.58 | 1.07–28.58 | 1.02–28.58 |
| CDOM/iop_agelb | ||||||
| Pearson’s r | 0.53 | 0.57 | 0.57 | 0.23 | 0.16 | 0.24 |
| MNB | −69% | −70% | −80% | −57% | −74% | −65% |
| RMSD | 72% | 74% | 81% | 136% | 85% | 118% |
| MAPD/APD | 69% | 70% | 80% | 97% | 83% | 90% |
| N | 36 | 55 | 29 | 30 | 48 | 48 |
| Val Range (m−1) | 0.33–1.4 | 0.28–1.4 | 0.33–1.4 | 0.33–1.4 | 0.28–1.4 | 0.28–1.4 |
| CDOM/iop_adg | ||||||
| Pearson’s r | 0.7 | 0.72 | 0.74 | 0.42 | 0.55 | 0.44 |
| MNB | −26% | −32% | −39% | −1% | −35% | −13% |
| RMSD | 60% | 61% | 51% | 138% | 62% | 112% |
| MAPD/APD | 55% | 55% | 47% | 61% | 51% | 51% |
| N | 36 | 55 | 29 | 30 | 48 | 48 |
| Val Range (m−1) | 0.33–1.4 | 0.28–1.4 | 0.33–1.4 | 0.33–1.4 | 0.28–1.4 | 0.28–1.4 |
| Secchi depth/kd_z90max | ||||||
| Pearson’s r | 0.12 | 0.14 | 0.59 | 0.15 | 0.5 | 0.13 |
| MNB | 26% | 26% | −34% | −48% | −33% | −45% |
| RMSD | 124% | 120% | 41% | 54% | 42% | 52% |
| MAPD/APD | 65% | 63% | 37% | 50% | 38% | 48% |
| N | 39 | 53 | 40 | 38 | 53 | 52 |
| Val Range (m) | 3.0–10.6 | 3.0–11.0 | 3.0–10.6 | 3.0–10.6 | 3.0–11.0 | 3.0–11.0 |
| TSM/TSM_NN | ||
| TSM_NN (±2 h) | TSM_NN (±3 h) | |
| Pearson’s r | 0.77 | 0.66 |
| MNB | 209% | 201% |
| RMSD | 265% | 263% |
| MAPD/APD | 211% | 204% |
| N | 37 | 56 |
| Val Range (g m3) | 0.28–4.49 | 0.28–4.49 |
| Chl-a/CHL_NN | ||
| CHL_NN (±2 h) | CHL_NN (±3 h) | |
| Pearson’s r | 0.48 | 0.43 |
| MNB | 75% | 63% |
| RMSD | 135% | 121% |
| MAPD/APD | 89% | 78% |
| N | 127 | 173 |
| Val Range (μg L−1) | 1.09–28.58 | 1.07–28.58 |
| CDOM/ADG443_NN | ||
| ADG443_NN (±2 h) | ADG443_NN (±3 h) | |
| Pearson’s r | 0.36 | 0.39 |
| MNB | −12% | −14% |
| RMSD | 66% | 69% |
| MAPD/APD | 44% | 46% |
| N | 29 | 47 |
| Val Range (m−1) | 0.3–0.7 | 0.29–0.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
O’Kane, S.; McCarthy, T.; Fealy, R.; Kratzer, S. A Validation of OLCI Sentinel-3 Water Products in the Baltic Sea and an Evaluation of the Effect of System Vicarious Calibration (SVC) on the Level-2 Water Products. Remote Sens. 2024, 16, 3932. https://doi.org/10.3390/rs16213932
O’Kane S, McCarthy T, Fealy R, Kratzer S. A Validation of OLCI Sentinel-3 Water Products in the Baltic Sea and an Evaluation of the Effect of System Vicarious Calibration (SVC) on the Level-2 Water Products. Remote Sensing. 2024; 16(21):3932. https://doi.org/10.3390/rs16213932
Chicago/Turabian StyleO’Kane, Sean, Tim McCarthy, Rowan Fealy, and Susanne Kratzer. 2024. "A Validation of OLCI Sentinel-3 Water Products in the Baltic Sea and an Evaluation of the Effect of System Vicarious Calibration (SVC) on the Level-2 Water Products" Remote Sensing 16, no. 21: 3932. https://doi.org/10.3390/rs16213932
APA StyleO’Kane, S., McCarthy, T., Fealy, R., & Kratzer, S. (2024). A Validation of OLCI Sentinel-3 Water Products in the Baltic Sea and an Evaluation of the Effect of System Vicarious Calibration (SVC) on the Level-2 Water Products. Remote Sensing, 16(21), 3932. https://doi.org/10.3390/rs16213932