
Deception Velocity-Based Method to Discriminate Physical Targets and Active False Targets in a Multistatic Radar System

 , , and
, , and
Abstract

1. Introduction
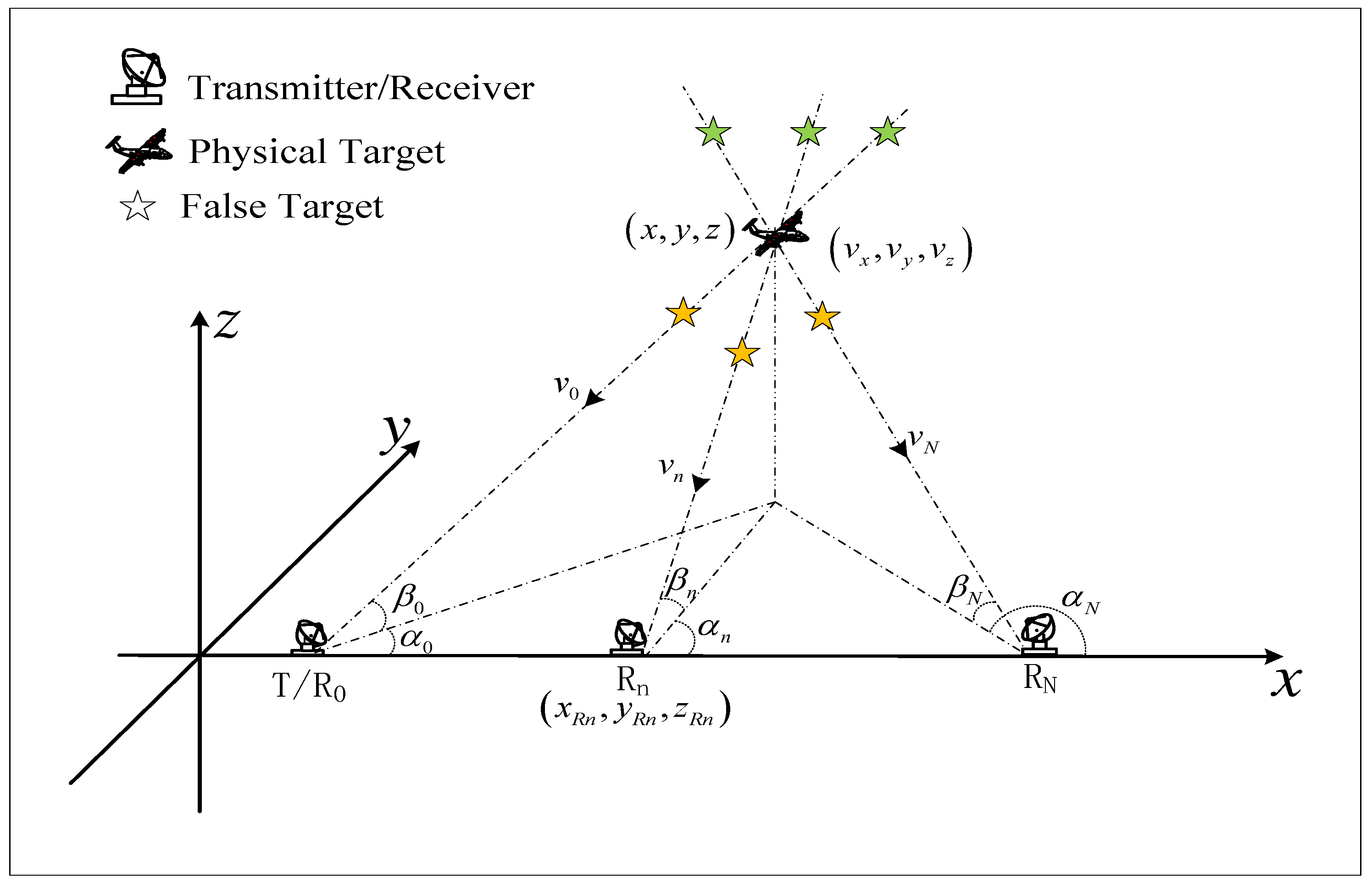
2. Multistatic Radar System Model
2.1. Signal Model
2.2. Measurement Model
3. Materials and Methods
- H: The combination corresponds to the same physical target;
- H: The combination corresponds to the same active false target;
- H: The combination is composed of different PTs and/or FTs.
3.1. Velocity Vector Association (VVA) Discriminator
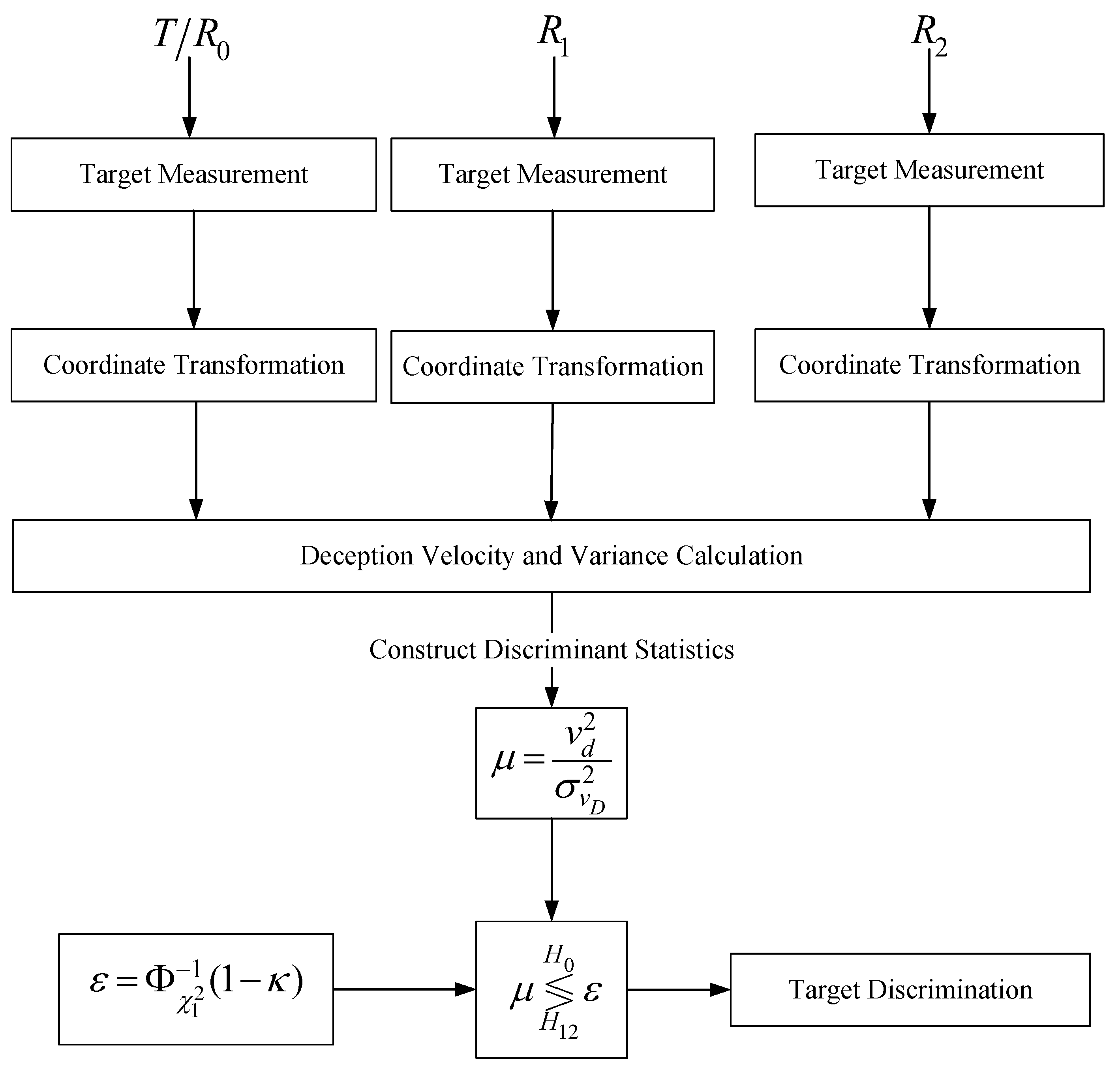
3.2. Proposed Deception Velocity-Based (DVB) Discrimination Method
- I. When all the combinations composed of one target in T/R and all targets in R and R are judged to be H, the target is discriminated to be an active false target;
- II. When more than one target combination composed of one target is judged to be H, the target combination with the minimum is reserved, and for one specific target, no more than one combination can pass the hypothesis testing to avoid ambiguity.
- Measurement Set Transformation: According to Equation (17), the origin measurement set of every target is transformed into the new measurement set in each receiver;
- Discrimination Statistic: Calculate the corresponding discrimination factors of both target combinations according to Equations (29);
- Hypothesis Testing: For each target combination, the hypothesis testing threshold is performed according to Equation (30);
- Target Discrimination: Finally, the physical and active false targets are discriminated according to the discrimination criterion.
4. Results and Discussion
4.1. Discrimination Performance
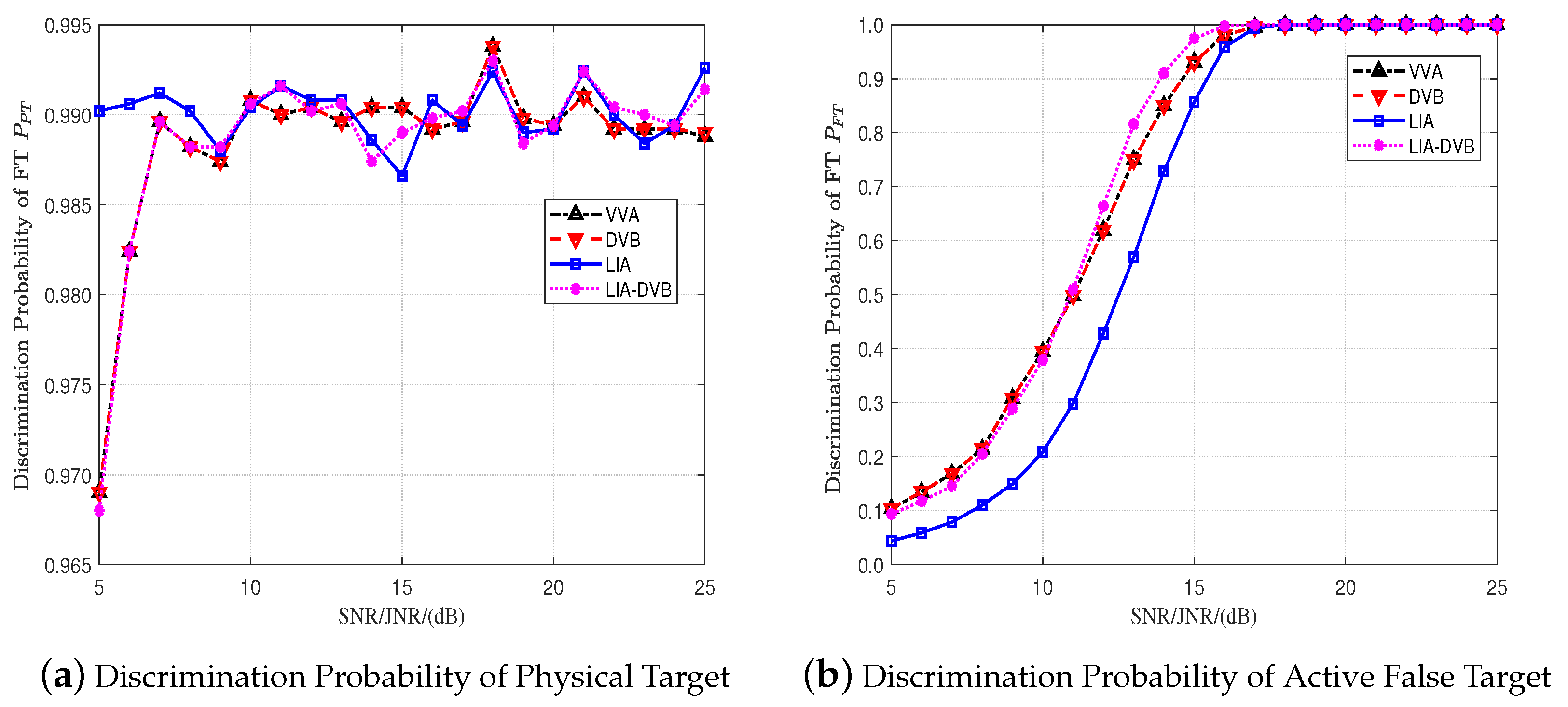
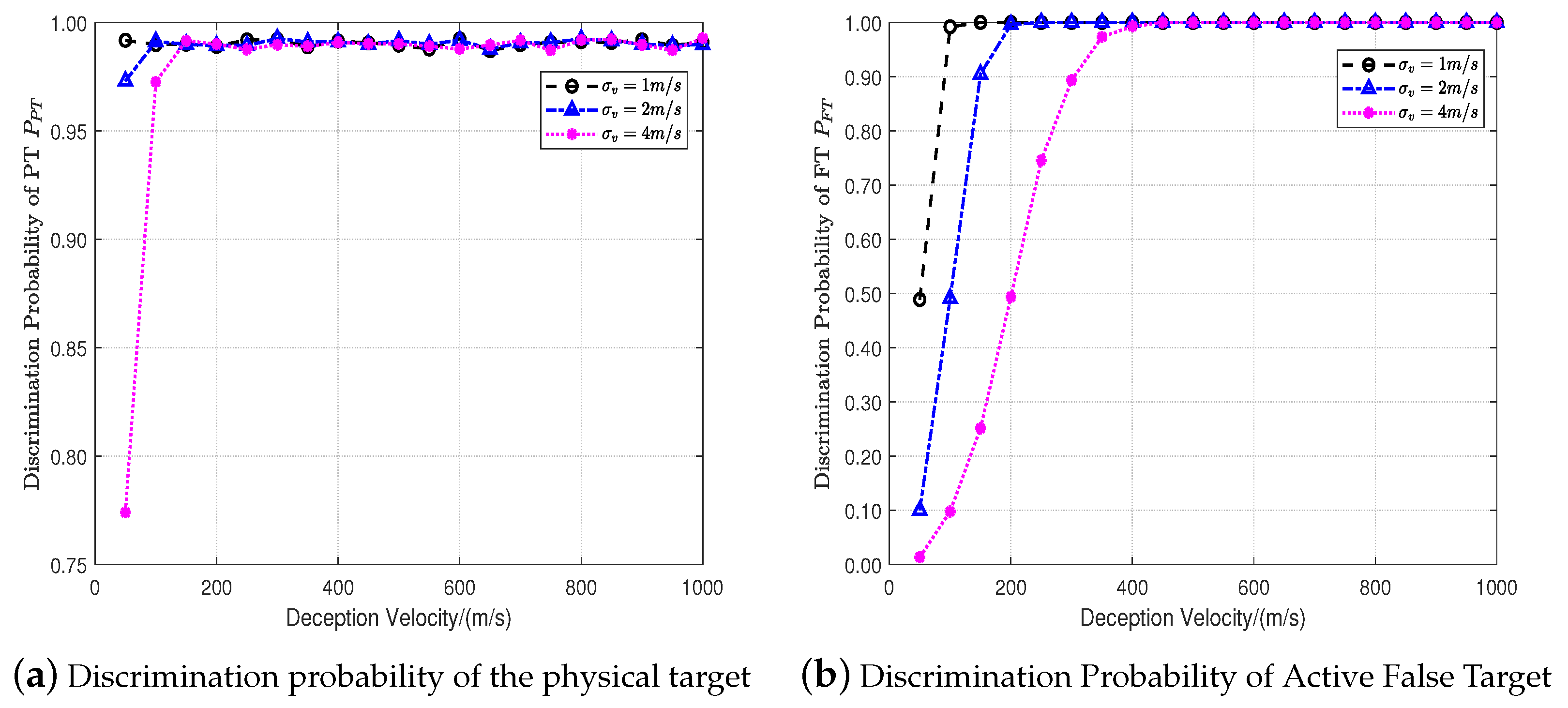
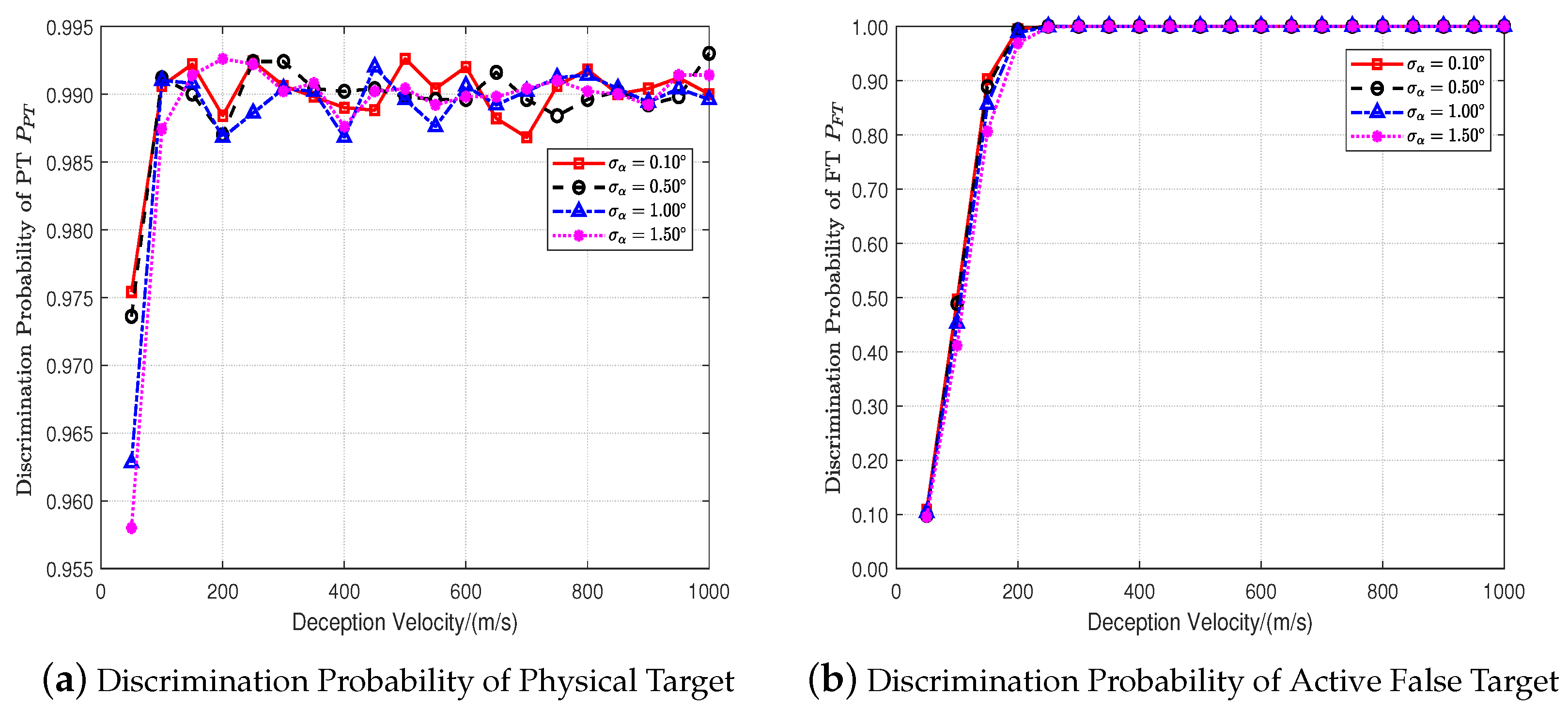
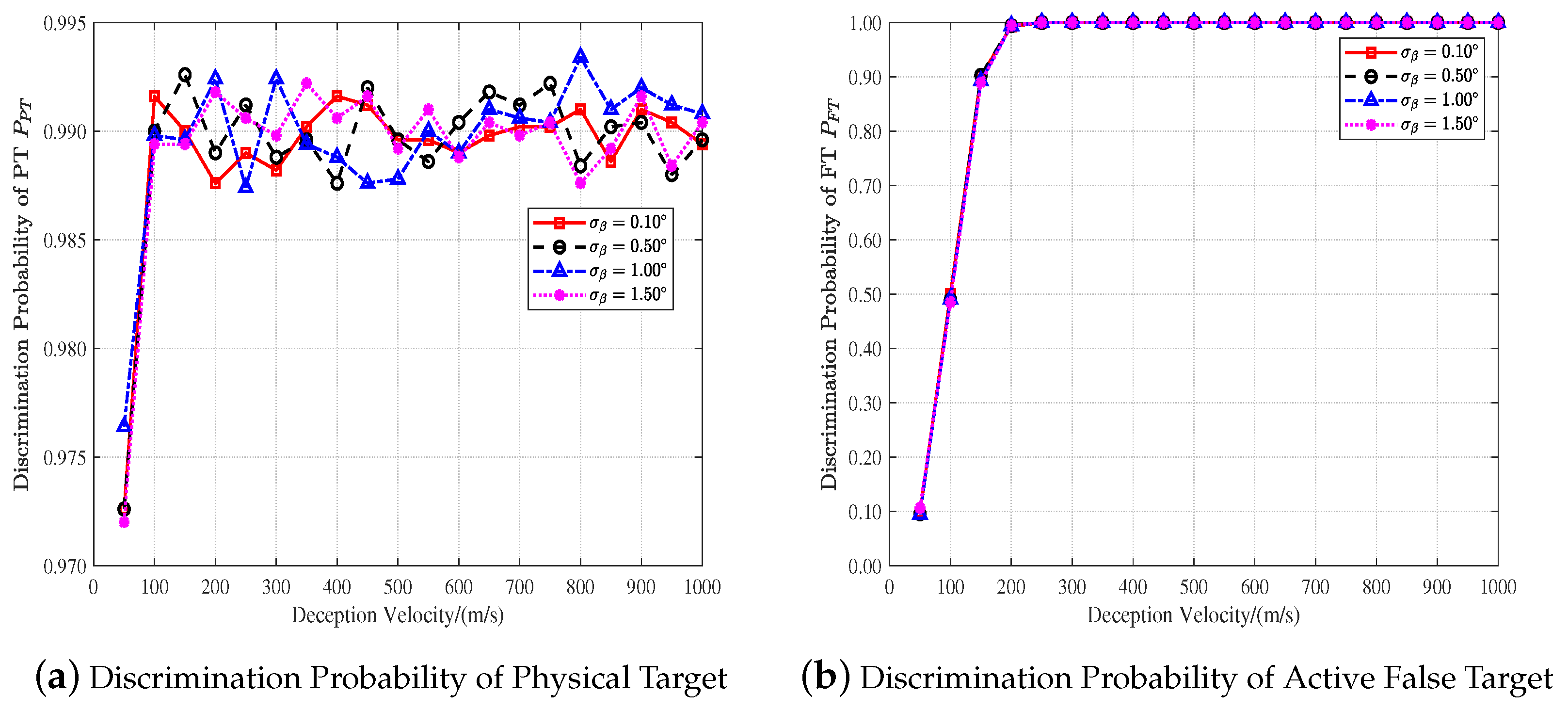
4.2. Influence of Measurement Accuracy on Discrimination Performance
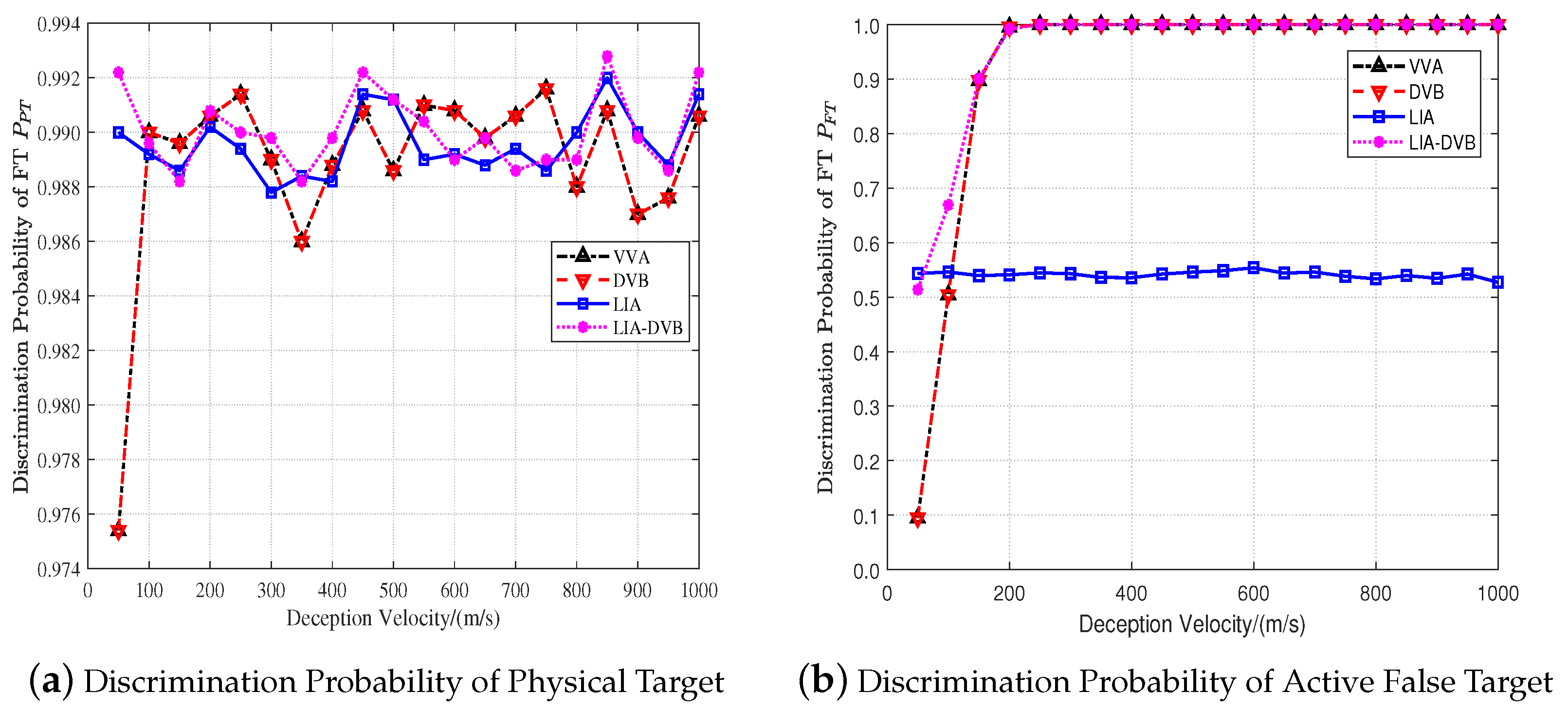
- When the deception velocity is small, the higher the accuracy of the velocity measurement and angle measurement, the better the discrimination performance for the physical target. With the increase in deception velocity, the discrimination probability of the physical target gradually reaches near the expected probability and remains constant;
- The higher the accuracy of velocity and angle measurement, the greater the deception velocity and the better the discrimination performance for active false targets.
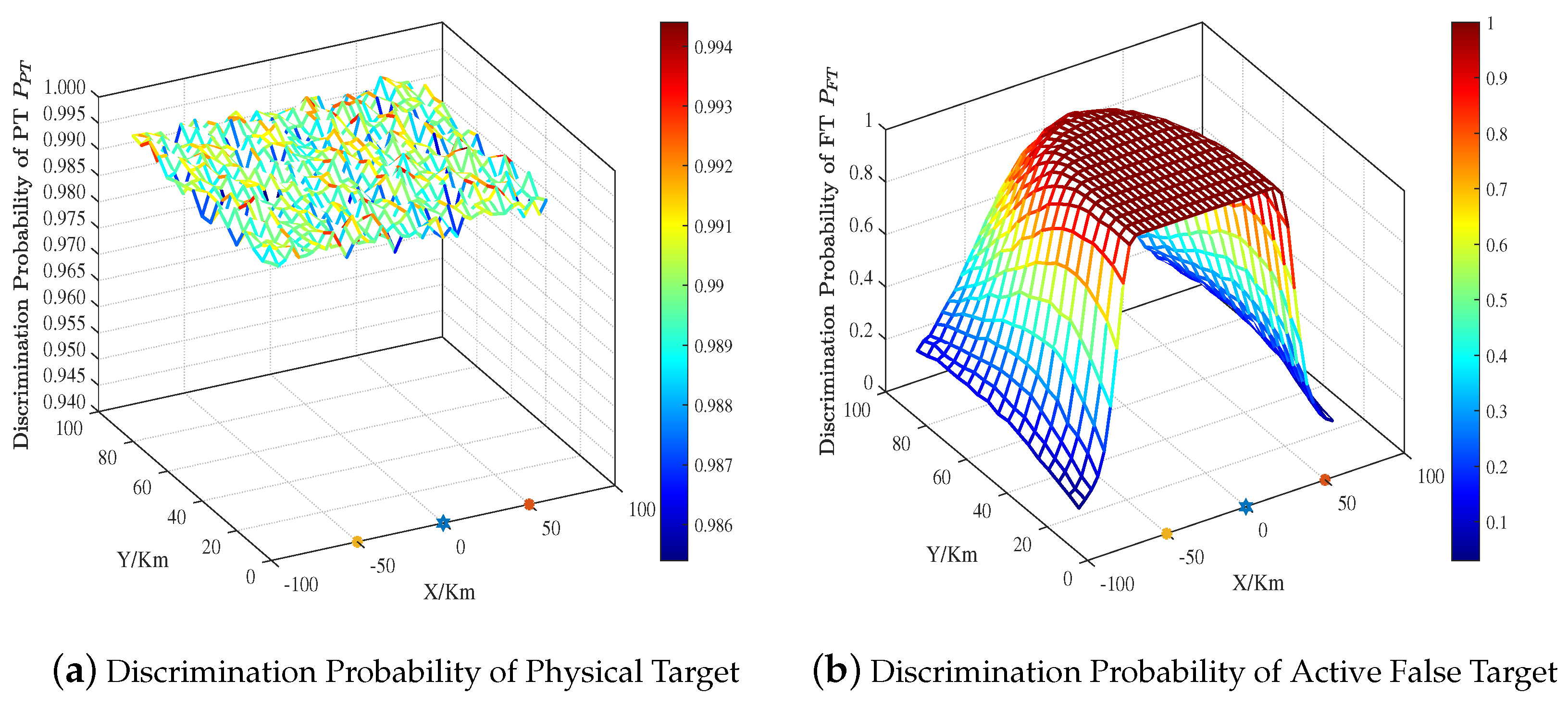
4.3. Effect of Target Location on Discrimination Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ECCM | electronic counter-countermeasures |
| DRFM | digital radio frequency memory |
| PT | physical target |
| FT | false target |
| LIA | location information association method |
| VVA | velocity vector association method |
| DVB | deception velocity-based method |
| SNR | signal-to-noise ratio |
| JNR | jamming-to-noise ratio |
References
- Li, N.-J.; Zhang, Y.-T. A Survey of Radar ECM and ECCM. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 1110–1120. [Google Scholar] [CrossRef]
- Berger, S. Digital Radio Frequency Memory Linear Range Gate Stealer Spectrum. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 725–735. [Google Scholar] [CrossRef]
- Han, B.; Qu, X.; Yang, X.; Li, W.; Zhang, Z. DRFM-Based Repeater Jamming Reconstruction and Cancellation Method with Accurate Edge Detection. Remote Sens. 2023, 15, 1759. [Google Scholar] [CrossRef]
- Cui, G.; Yu, X.; Wei, W.; Xiong, K.; Kong, L.; Kong, Y. An overview of antijamming methods and future works on cognitive intelligent radar. J. Radar 2022, 11, 974–1002. [Google Scholar] [CrossRef]
- Ling, Q.; Huang, P.; Wang, D.; Xu, H.; Wang, L.; Liu, X.; Liao, G.; Sun, Y. Range Deception Jamming Performance Evaluation for Moving Targets in a Ground-Based Radar Network. Electronics 2023, 12, 1614. [Google Scholar] [CrossRef]
- Kanhere, O.; Goyal, S.; Beluri, M.; Rappaport, T.S. Target Localization Using Bistatic and Multistatic Radar with 5G NR Waveform. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Bo, Y.; Enrico, P.; Xu, L.; Lu, H. A Target Detection and Tracking Method for Multiple Radar Systems. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–21. [Google Scholar] [CrossRef]
- Chen, Y.; Wei, P.; Zhang, H.; You, M.; Li, W. Direct Target Joint Detection and Tracking Based on Passive Multi-Static Radar. Remote Sens. 2023, 15, 624. [Google Scholar] [CrossRef]
- Lu, R.; Liu, X.; Chen, X. Localization and Tracking of Multiple Fast Moving Targets in Bistatic MIMO Radar. Signal Process. 2023, 203, 108780. [Google Scholar] [CrossRef]
- Liu, J.; Gong, M.; Nie, Z.; Li, H.; Liu, J.; Zhao, S. Subset Selection Strategies Based on Target Positioning Characteristics for Anti-Jamming Technology. Remote Sens. 2022, 14, 6230. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, W.; Zhang, Q.; Xie, J. Joint Resource Optimization for a Distributed MIMO Radar When Tracking Multiple Targets in the Presence of Deception Jamming. Signal Process. 2022, 200, 108641. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, S.; Zhou, Y.; Liu, N.; Zhang, J. Research Advance on Cooperative Anti-Deception Jamming in Netted Radar. J. Data Acquis. Process 2014, 29, 516–525. [Google Scholar] [CrossRef]
- Song, R.; Cheng, D.; Qi, W.; Xiang, L.; Jiang, Y. Research on Anti-Deceptive Jamming of Multi Station Fusion of Netted Radar. In Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17–19 June 2022; pp. 1732–1734. [Google Scholar] [CrossRef]
- Yang, L.; Xu, H.; Sun, Z. Identification Method of False-Targets in T/R-R Bistatic Radar System. J. Nationnal Univ. Def. 1997, 19, 1–7. [Google Scholar]
- Zhao, Y.; Wang, X.; Wang, G.; Liu, L.; Luo, J. Tracking Technique for Radar Network in the Presence of Multi-Range-False-Target Deception Jamming. ACTA Electron. Sin. 2007, 35, 454–458. [Google Scholar]
- Wang, G.; Ji, Z. Multi-range-false-target Jamming for Radar Network on Mutliple Disriminations. Syst. Eng. Electron. 2017, 39, 40–48. [Google Scholar]
- Bo, L.; Yao, S.; Zhou, C.-y. Study of Multistatic Radar against Velocity-Deception Jamming. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2011; pp. 1044–1047. [Google Scholar]
- Huang, D.; Cui, G.; Yu, X.; Ge, M.; Kong, L. Joint Range–Velocity Deception Jamming Suppression for SIMO Radar. IET Radar Sonar & Navig. 2019, 13, 113–122. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, L.; Zhou, Y.; Liu, N. Measurement Fusion Method against False-Target Jamming for Radar Network. J. Univ. Electron. Sci. Technol. China 2014, 43, 207–211. [Google Scholar]
- Zhu, Y.; Da, K.; Yang, Y.; Fu, Q. Multiple Active False Target Suppression Based on Distributed GM-PHD Filter. In Proceedings of the 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 14–17 October 2021; pp. 1053–1057. [Google Scholar] [CrossRef]
- Yang, Y.; Da, K.; Zhu, Y.; Fu, Q. Consensus-Based Distributed Target Tracking in the Presence of Active False Targets. In Proceedings of the 2021 IEEE 2nd International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering (ICBAIE), Nanchang, China, 26–28 March 2021; pp. 753–757. [Google Scholar] [CrossRef]
- Yang, Y.; Da, K.; Zhu, Y.; Xiang, S.; Fu, Q. Consensus Based Target Tracking against Deception Jamming in Distributed Radar Networks. IET Radar Sonar & Navig. 2023, 17, 683–700. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.; Cimini, L.; Chizhik, D.; Valenzuela, R. Spatial Diversity in Radars—Models and Detection Performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Zhou, S.; Liu, H.; Zhao, Y.; Hu, L. Target Spatial and Frequency Scattering Diversity Property for Diversity MIMO Radar. Signal Process. 2011, 91, 269–276. [Google Scholar] [CrossRef]
- Chernyak, V.S. Adaptive Mainlobe Jamming Cancellation and Target Detection in Multistatic Radar Systems. In Proceedings of the International Radar Conference, Beijing, China, 8–10 October 1996; pp. 297–300. [Google Scholar] [CrossRef]
- Wang, B.; Cui, G.; Zhang, S.; Sheng, B.; Kong, L.; Ran, D. Deceptive Jamming Suppression Based on Coherent Cancelling in Multistatic Radar System. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Zhao, S.; Zhou, Y.; Zhang, L.; Guo, Y.; Tang, S. Discrimination between Radar Targets and Deception Jamming in Distributed Multiple-radar Architectures. IET Radar Sonar & Navig. 2017, 11, 1124–1131. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, L.; Zhou, Y.; Liu, N.; Liu, J. Discrimination of Active False Targets in Multistatic Radar Using Spatial Scattering Properties. IET Radar Sonar & Navig. 2016, 10, 817–826. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, L.; Zhou, Y.; Zhao, S.; Liu, N.; Zhang, J. Discrimination of Active False Targets Based on Hermitian Distance for Distributed Multiple-Radar Architectures. IEEE Access 2019, 7, 71872–71883. [Google Scholar] [CrossRef]
- Sun, M.; Ding, C.; Zhang, S.; Lu, J.; Shao, P. Recognition of Deception Jamming Based on Statistical Correlation Difference in a Multistatic Radar System. J. Electron. Inf. Technol. 2020, 42, 2992–2998. [Google Scholar]
- Zhao, S.; Liu, N.; Zhang, L.; Zhou, Y.; Li, Q. Discrimination of Deception Targets in Multistatic Radar Based on Clustering Analysis. IEEE Sens. J. 2016, 16, 2500–2508. [Google Scholar] [CrossRef]
- Liu, J.; Gong, M.; Zhang, M.; Li, H.; Zhao, S. An Anti-jamming Method in Multistatic Radar System Based on Convolutional Neural Network. IET Signal Process. 2022, 16, 220–231. [Google Scholar] [CrossRef]
- Wang, W.-Q. GPS-Based Time & Phase Synchronization Processing for Distributed SAR. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1040–1051. [Google Scholar] [CrossRef]
- Han, X.; He, H.; Zhang, Q.; Yang, L.; He, Y. Suppression of Deception-False-Target Jamming for Active/Passive Netted Radar Based on Position Error. IEEE Sens. J. 2022, 22, 7902–7912. [Google Scholar] [CrossRef]
- Krishnamoorthy, K. Handbook of Statistical Distributions with Applications, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Curry, G.R. Radar System Performance Modeling, 2nd ed.; Artech House Radar Library: Artech House: Boston, MA, USA, 2005. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar | T/R | R | R |
|---|---|---|---|
| Location coordinate (km) | |||
| Range Measurement Standard Deviation (m) | 40 | 40 | 40 |
| Angle Measurement Standard Deviation (°) | 0.10 | 0.10 | 0.10 |
| Angle Measurement Standard Deviation (°) | 0.10 | 0.10 | 0.10 |
| Velocity Measurement Standard Deviation (ms) | 2 | 2 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Guo, Y.; Zhang, P.; Xu, H.; Zhang, L.; Chen, Z.; Huang, Y. Deception Velocity-Based Method to Discriminate Physical Targets and Active False Targets in a Multistatic Radar System. Remote Sens. 2024, 16, 382. https://doi.org/10.3390/rs16020382
Li Q, Guo Y, Zhang P, Xu H, Zhang L, Chen Z, Huang Y. Deception Velocity-Based Method to Discriminate Physical Targets and Active False Targets in a Multistatic Radar System. Remote Sensing. 2024; 16(2):382. https://doi.org/10.3390/rs16020382
Chicago/Turabian StyleLi, Qiang, Yumei Guo, Peng Zhang, Hong Xu, Linrang Zhang, Zhanye Chen, and Yan Huang. 2024. "Deception Velocity-Based Method to Discriminate Physical Targets and Active False Targets in a Multistatic Radar System" Remote Sensing 16, no. 2: 382. https://doi.org/10.3390/rs16020382
APA StyleLi, Q., Guo, Y., Zhang, P., Xu, H., Zhang, L., Chen, Z., & Huang, Y. (2024). Deception Velocity-Based Method to Discriminate Physical Targets and Active False Targets in a Multistatic Radar System. Remote Sensing, 16(2), 382. https://doi.org/10.3390/rs16020382