
The ESA Permanent Facility for Altimetry Calibration in Crete: Advanced Services and the Latest Cal/Val Results

 ,
,  , ,
, ,  , , and
, , and
Abstract
1. Introduction
- (a)
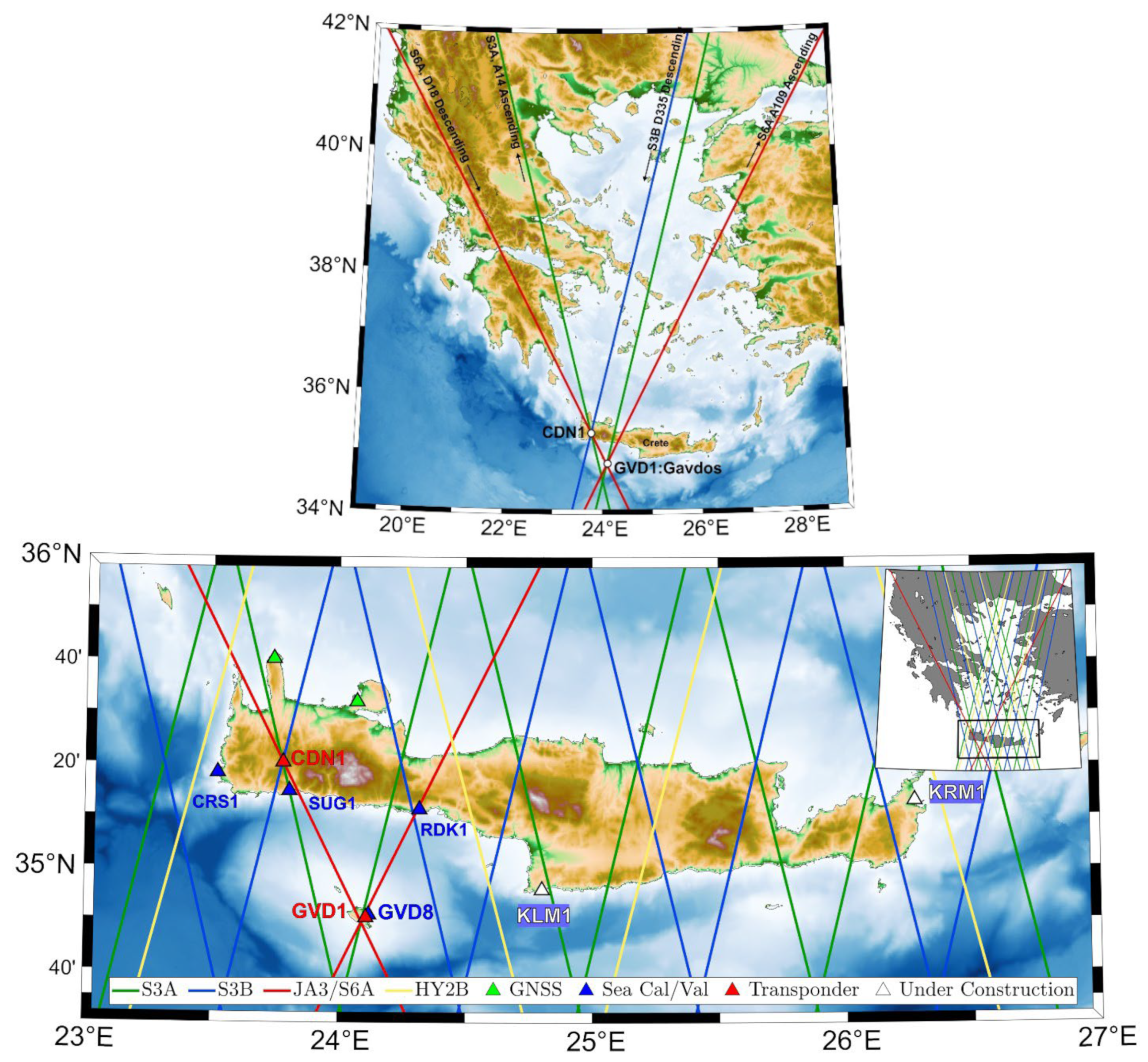
- To provide Cal/Val services for all international satellite altimeters, such as Sentinel-6 MF, Sentinel-3A, Sentinel-3B, CryoSat-2, HY-2A, HΥ-2B, HY-2C, the Jason series, SARAL/AltiKa, and Envisat (Figure 1) (Multi-satellite capacity).
- (b)
- To integrate various Cal/Val inputs coming from a combination of different reference sites, observations, settings, and technologies, and, thus, to monitor the performance of a satellite altimeter reliably, and resolve relationships among different missions (Integration and Synthesis capacity).
- (c)
- To operate this PFAC infrastructure in conformity with the Fiducial Reference Measurements (FRM) recommendations. The facility, thus, supports calibration with redundant ground instrumentation, operating in diverse settings (mountains, coasts, different altitudes, orbit crossovers, etc.), of different types (e.g., GPS, GLONASS, Galileo, DORIS, sea-surface, transponders, etc.), various instrument makes, with distinct measuring technologies (e.g., acoustic, pressure, radar tide gauges, etc.), and instrumentation situated at reference sites where Cal/Val results could be cross-examined, validated, and, thus, ensured (Diverse Reference capacity).
- (d)
- (e)
- (f)
- To augment its reference baseline for calibrating other parameters of altimetry (e.g., backscatter coefficient, spacecraft orientation in space, sea state and wind [20]) and for implementing alternative techniques of calibration with GNSS interferometric reflectometry [21,22], corner reflectors [23], microwave radiometers [24], etc. (Multiple Parameter Calibration capacity).
2. The PFAC Infrastructure and Instrumentation Modernization
2.1. The GVD1 Transponder Cal/Val in Gavdos
2.1.1. Justification for Another Transponder
- (1)
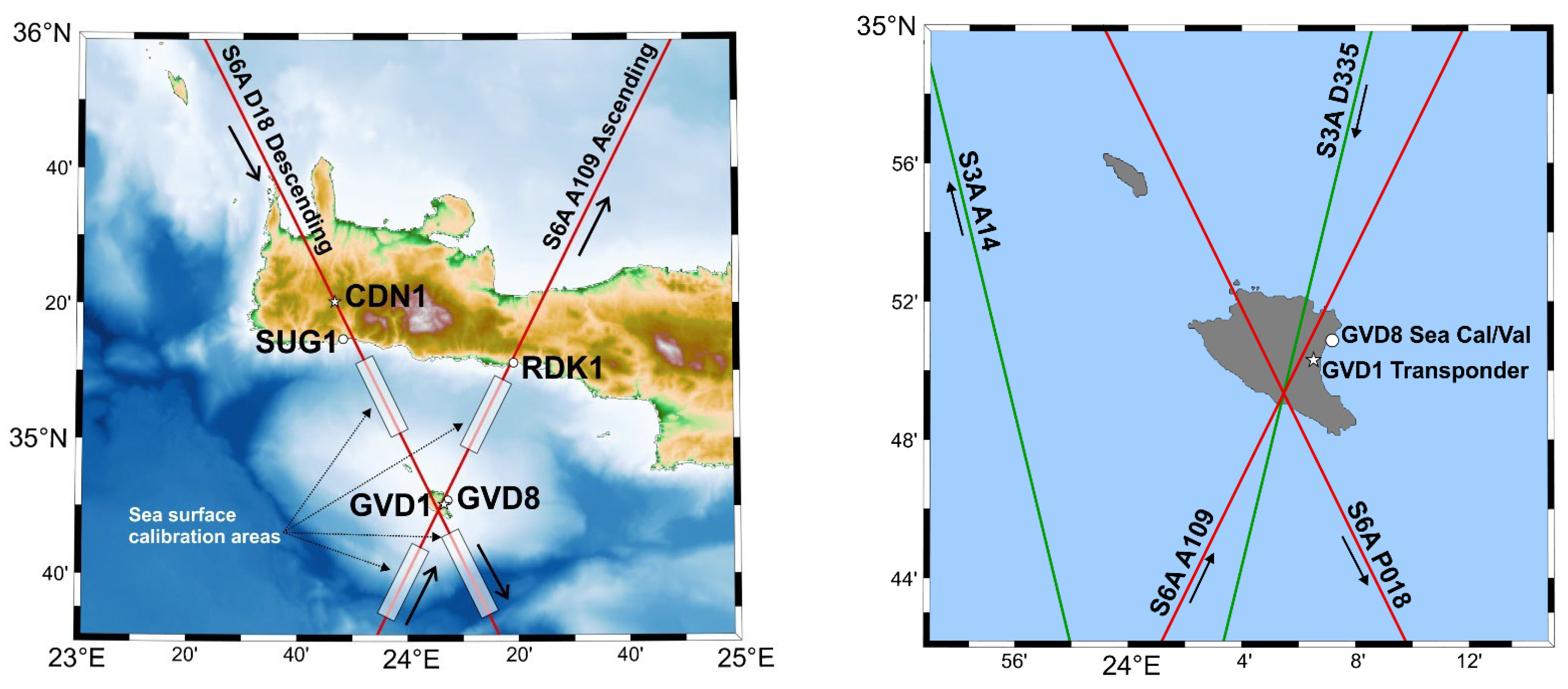
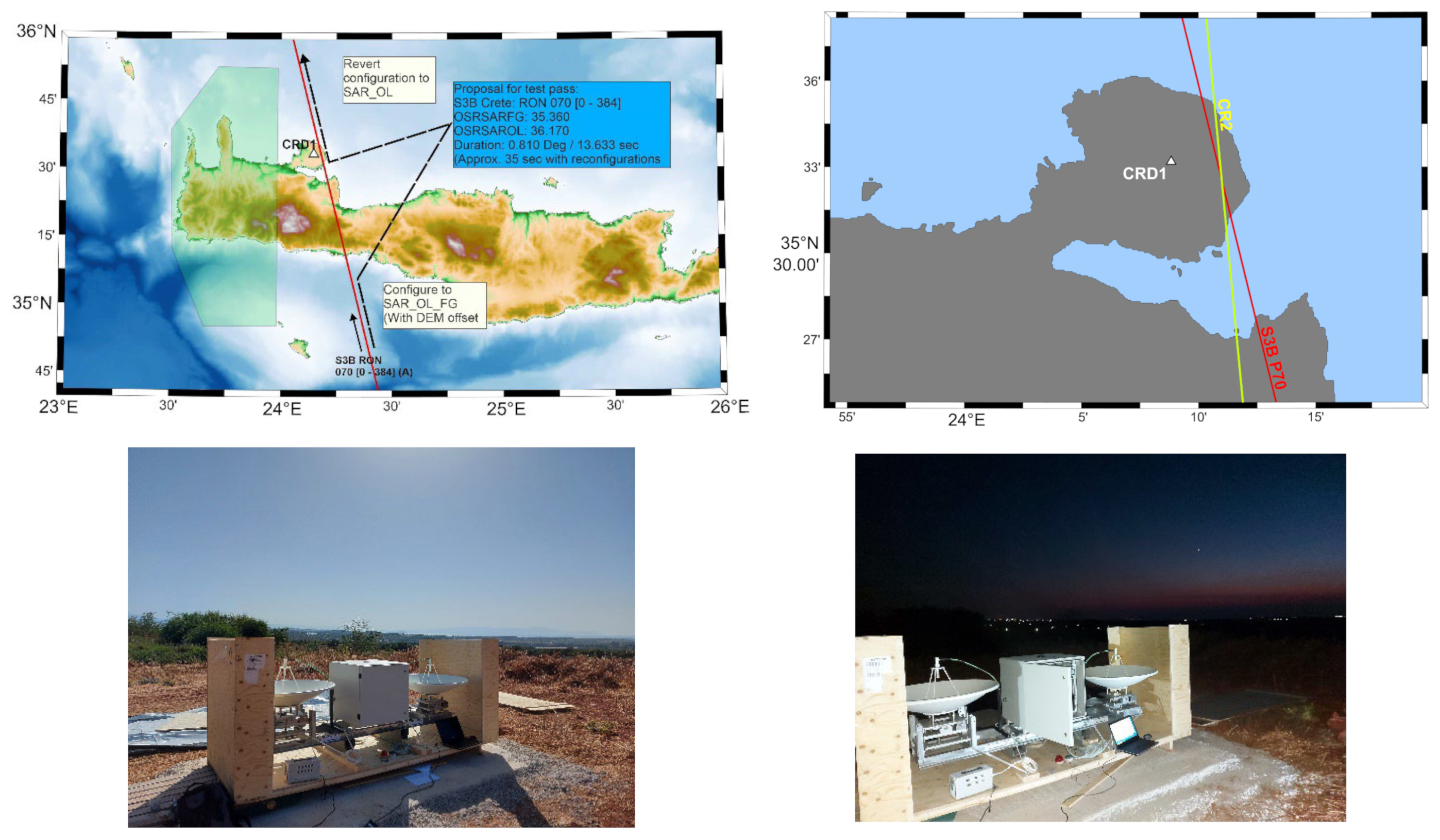
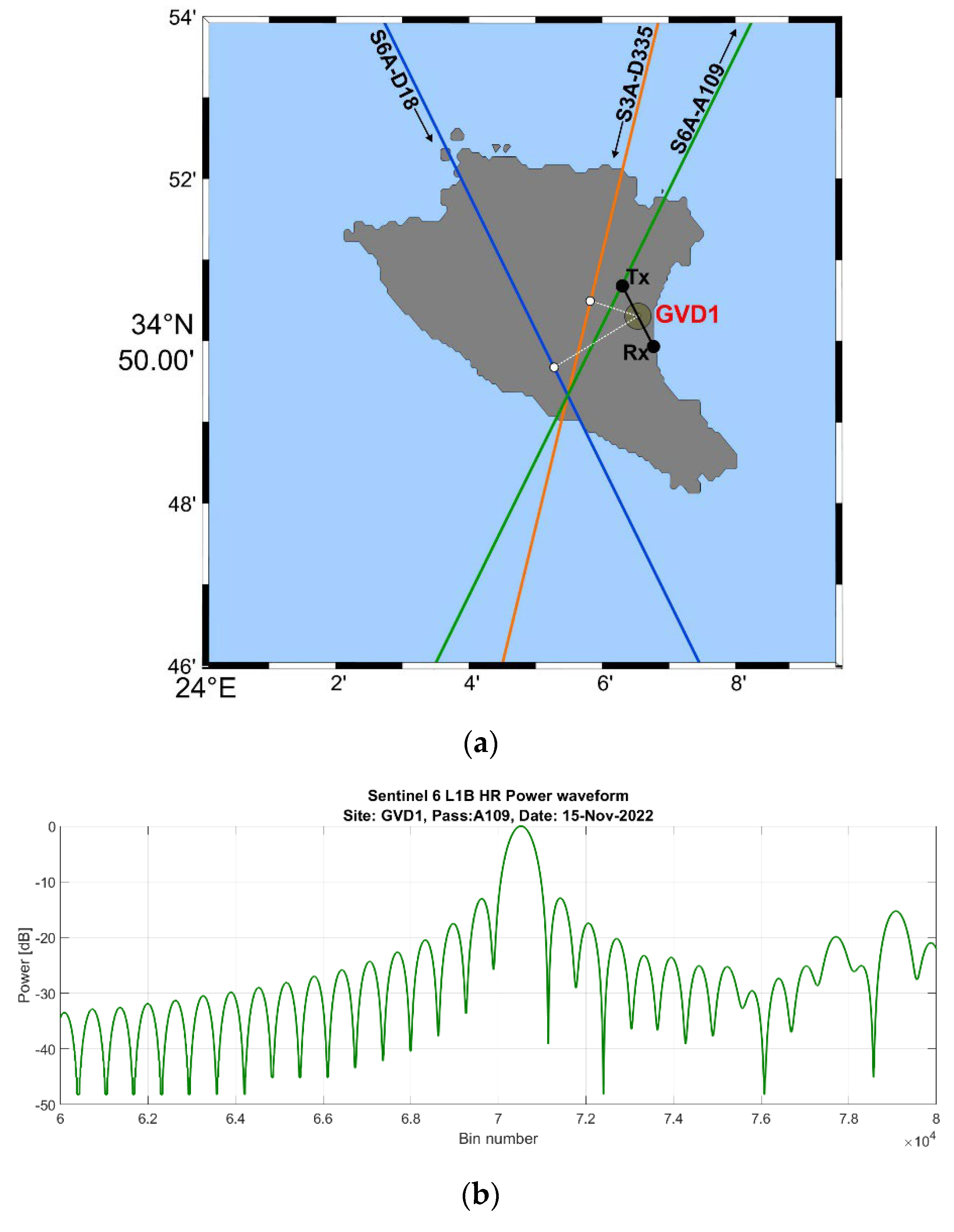
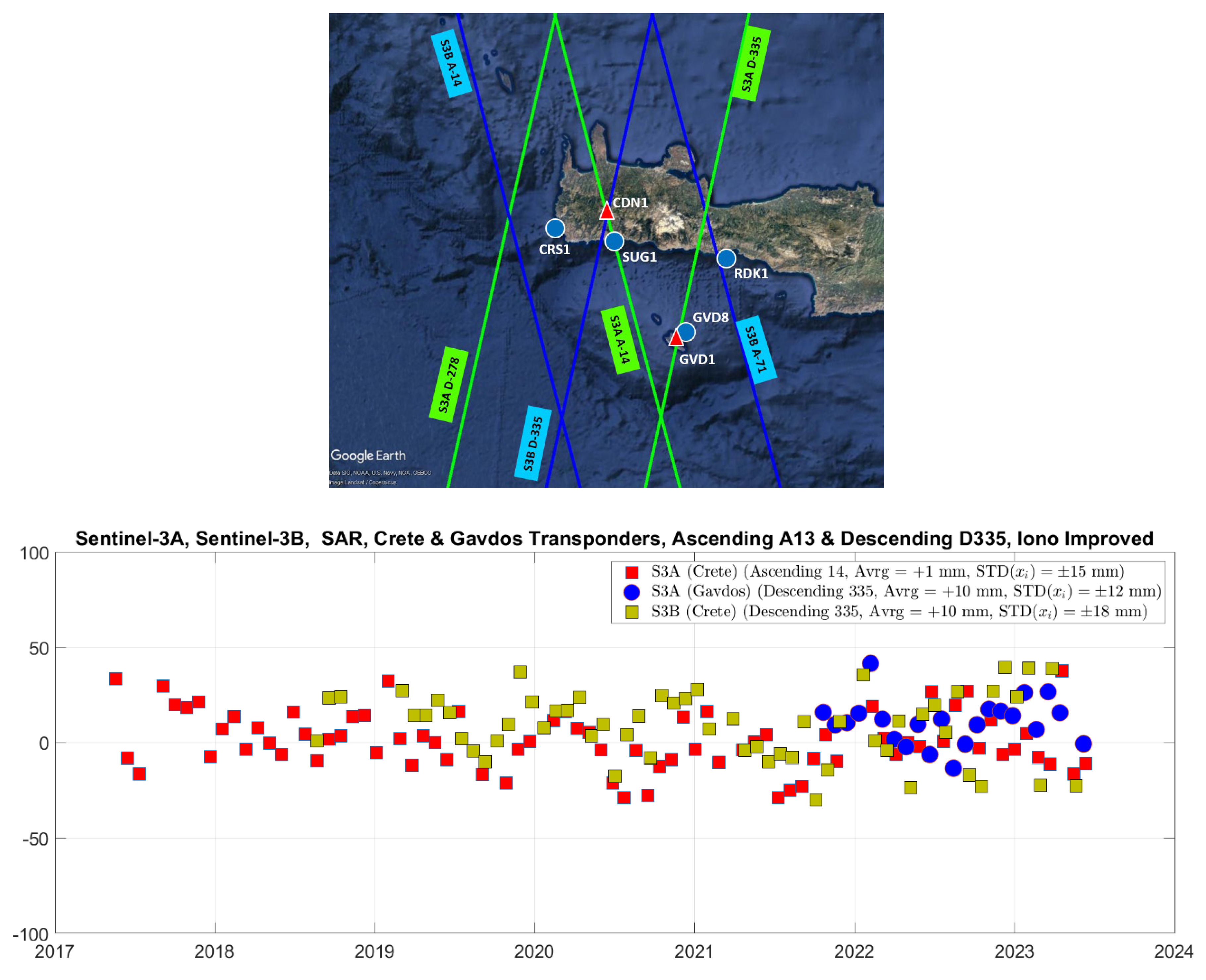
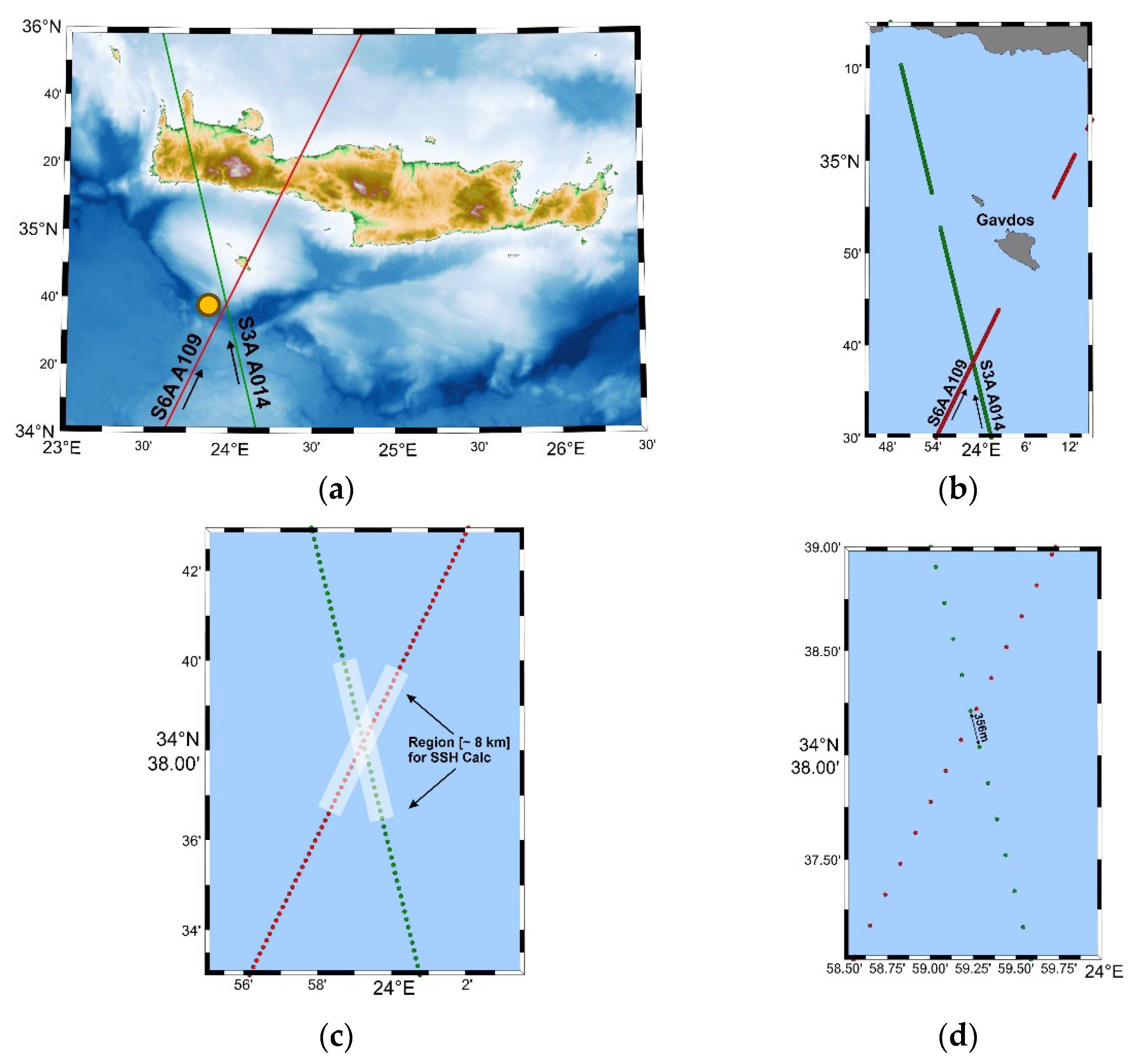
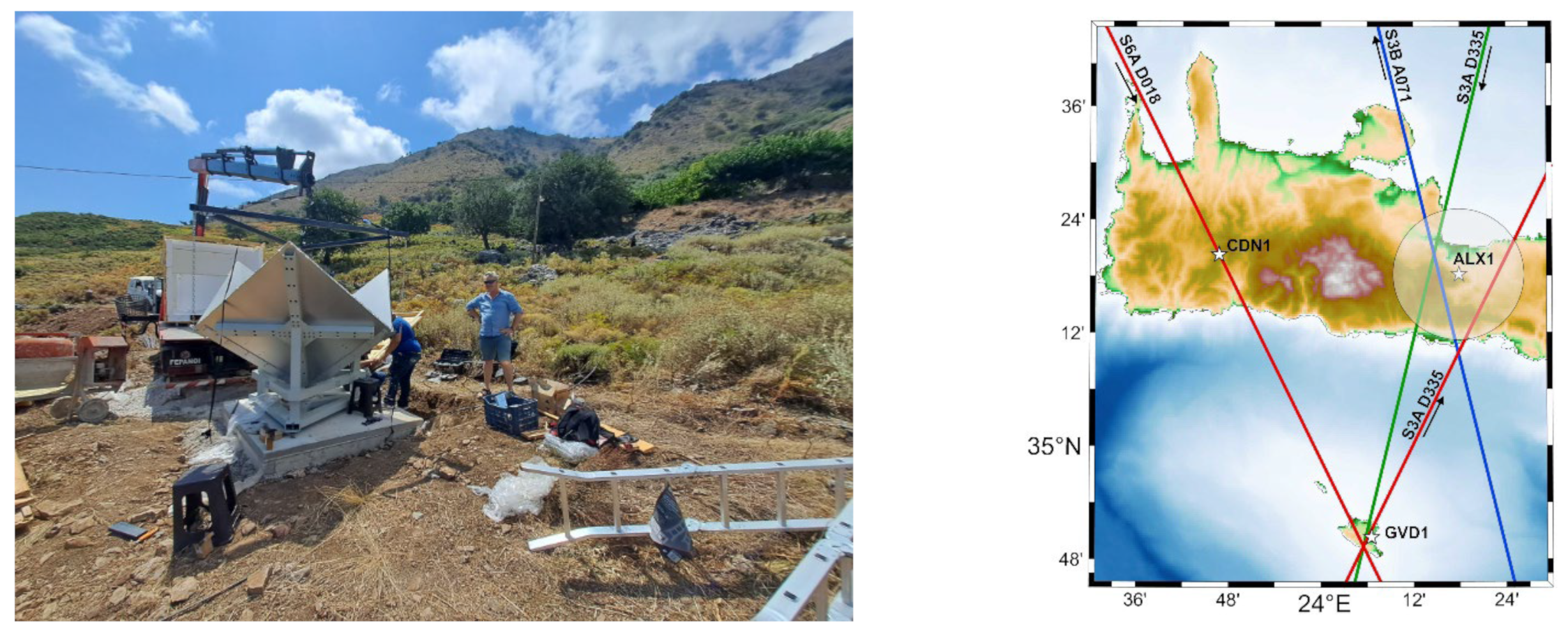
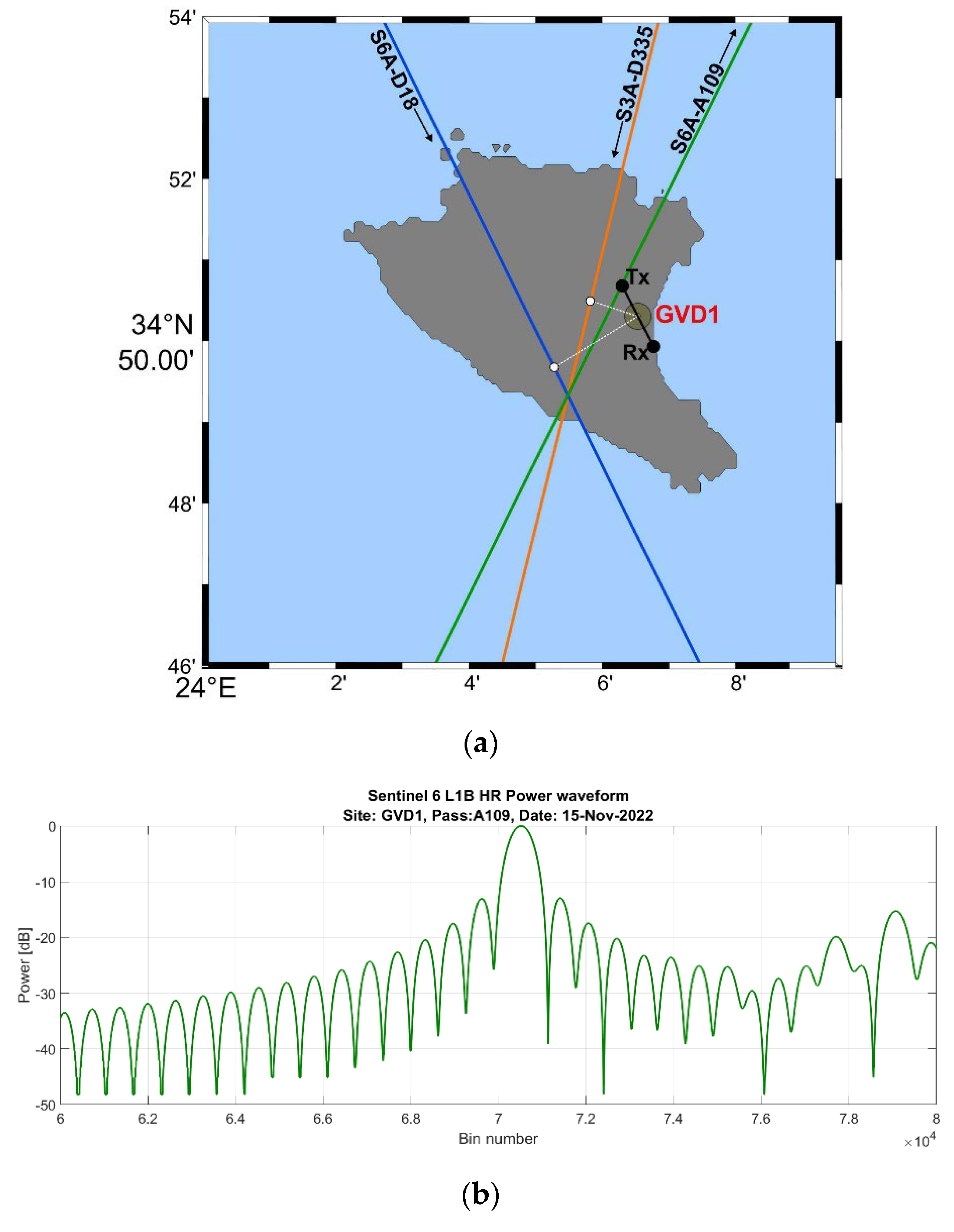
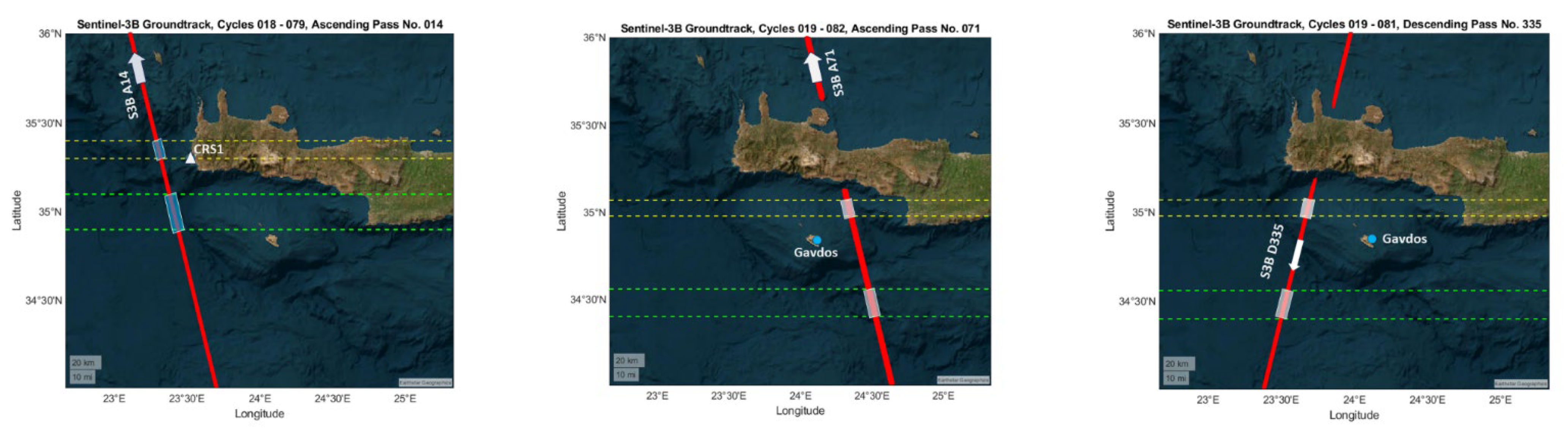
- The chosen GVD1 site lies, for the first time, under a triple crossover of the ground tracks for the descending (D18) and ascending (A109) pass of Sentinel-6 MF and also for the descending Pass D335 of Sentinel-3A (Figure 4). Hence, satellite ground track and related directional angle errors can, in principle, be established;
- (2)
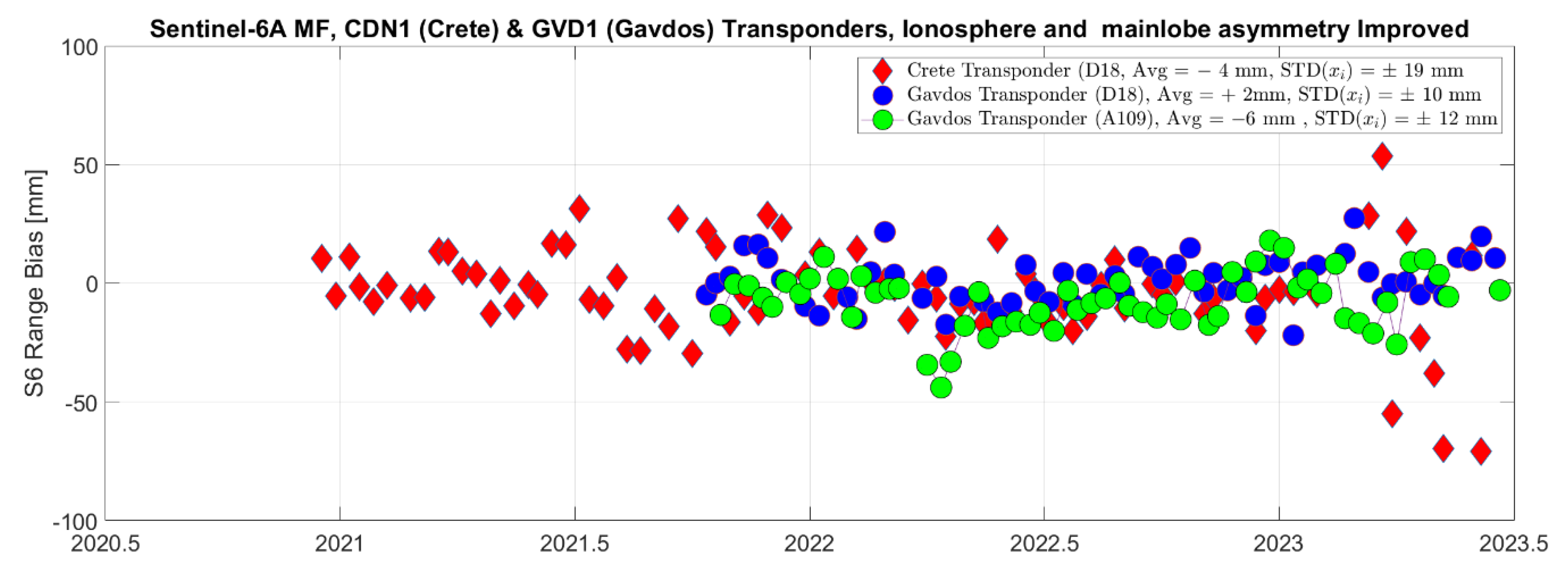
- The GVD1 site is separated, along the same descending orbit D18, by only 9 s from the CDN1 transponder in the mountains of Crete. Thus, Sentinel-6 MF observations are monitored almost simultaneously with the instrumentation of different technology and with diverse conditions and settings;
- (3)
- The new site in Gavdos presents the advantage of tying transponder observations to the major sea-surface Cal/Val site, only 2 km away, on Gavdos Island, which has been operating for almost 20 years;
- (4)
- Measuring conditions of the GVD1 transponder are quite different from the transponder in the mountains. GVD1 is located at a lower elevation (about 98 m above sea level) than the CDN1 transponder and operates with totally different atmospheric conditions and different technology. Accordingly, transponder results could be objectively controlled;
- (5)
- The establishment and operation of a transponder at GVD1 at a crossover location doubles the number of transponder calibrations for Sentinel-6 MF. For example, it monitors the satellite every 4 and 6 days consecutively, instead of every 10 days (precisely, every 9 days and 22 h) [25], as is commonly done at CDN1 with a descending orbit D18 alone;
- (6)
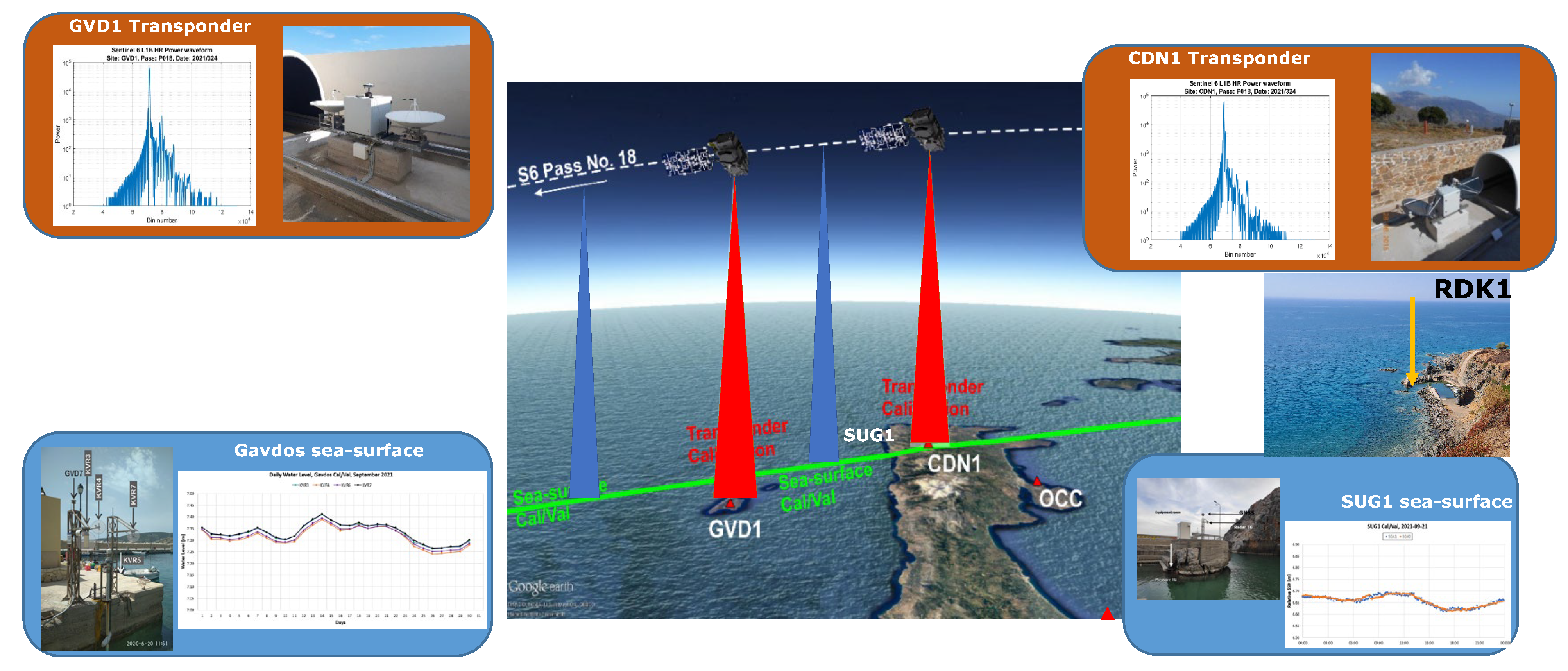
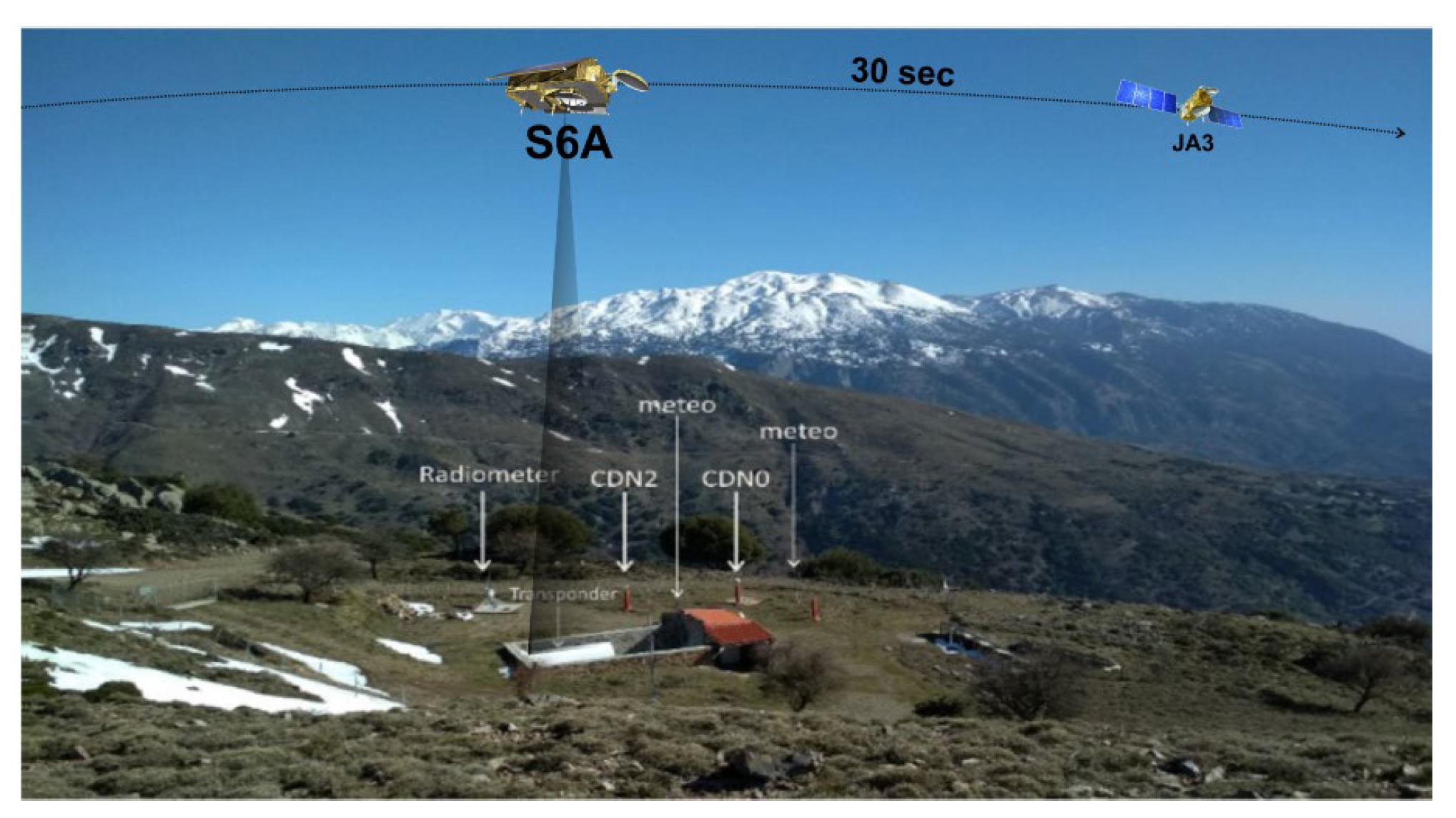
- The establishment of this GVD1 transponder supports the goals of the FRM strategic plan for monitoring satellite altimetry. This is because the performance of the Sentinel-6 MF is evaluated along the same descending pass (D18) by two sea-surface (GVD8 in Gavdos and SUG1 in Crete) and two transponder (CDN1: west Crete and GVD1: Gavdos) Cal/Val facilities (Figure 5). This one-of-a-kind geometry ensures the required redundancy for monitoring Sentinel-6 MF with this ground facility in Gavdos and Crete.
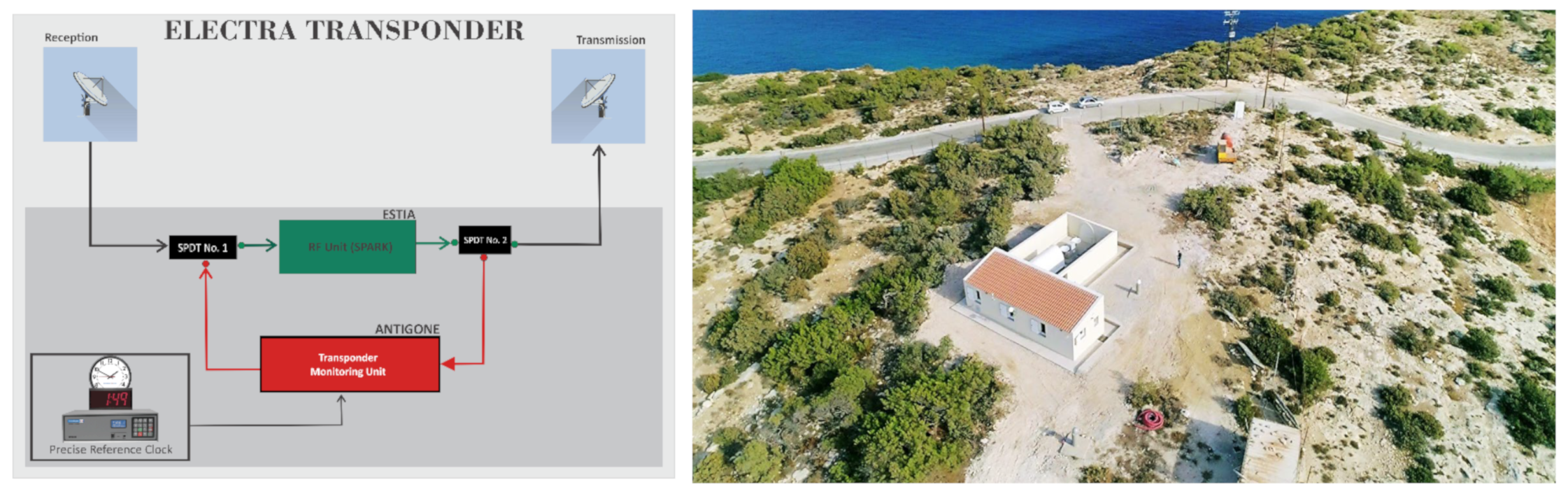
2.1.2. The New “ELECTRA” Transponder in Gavdos
- Dual operation for range and sigma-naught calibration. The ELECTRA transponder was designed to support absolute calibration, not only for the range, but also for the backscatter coefficient (sigma-naught). This combined technology emerged, for the first time, to simultaneously calibrate range and sigma-naught in satellite altimetry.
- The motivation for a double and simultaneous calibration in Gavdos was related to the ability, in the first place, to secure and strengthen the operational capabilities of the range calibration at the CDN1 transponder in Crete, and further to bolster the recently refurbished ESA sigma-naught transponder in Italy [26].
- Selectable gain. The electronics of the ELECTRA transponder can be selected to amplify, when required, the received signal by 1-dB steps and in the range between 75 dB and 80 dB. This function permits transponder operations for several satellite altimeters with differing altitudes and signal strengths.
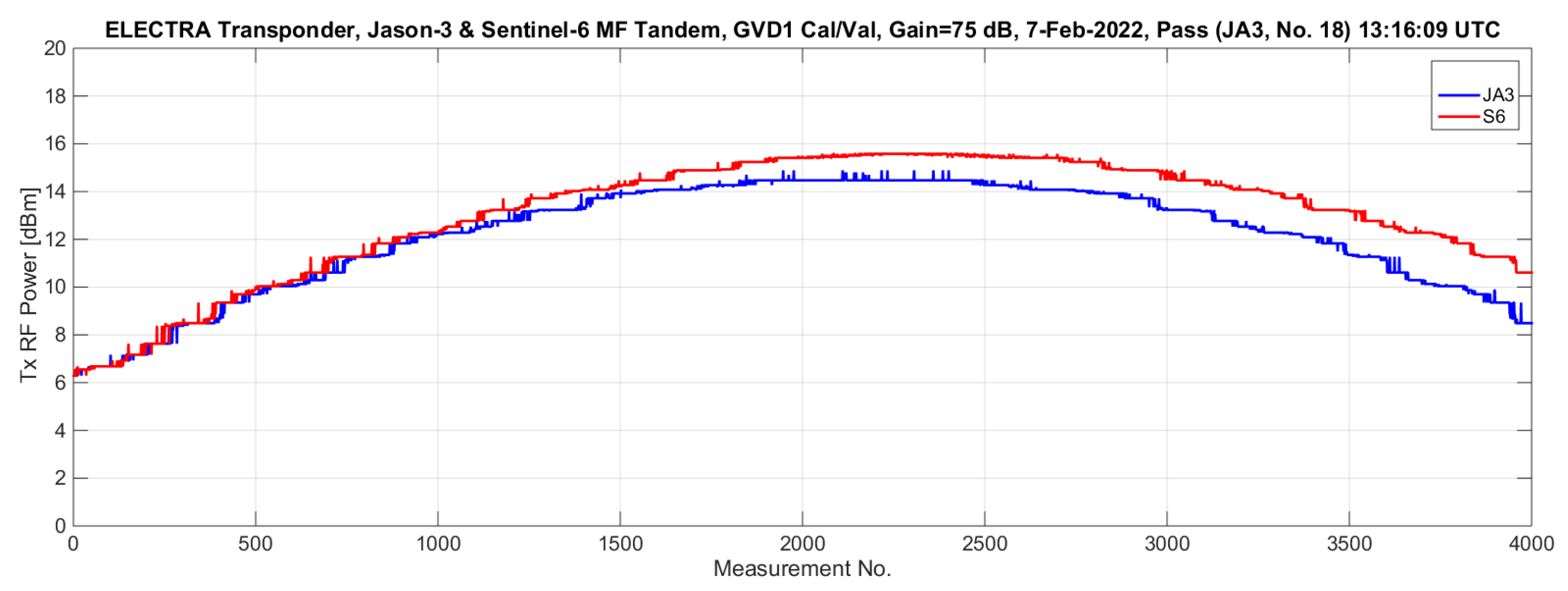
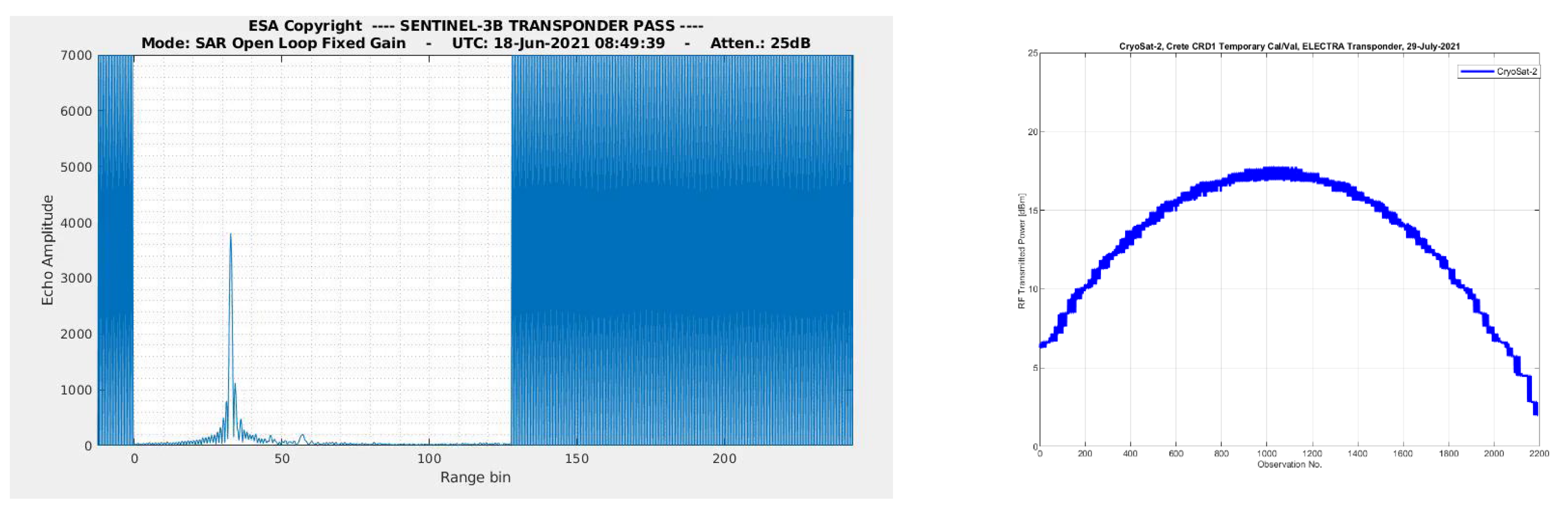
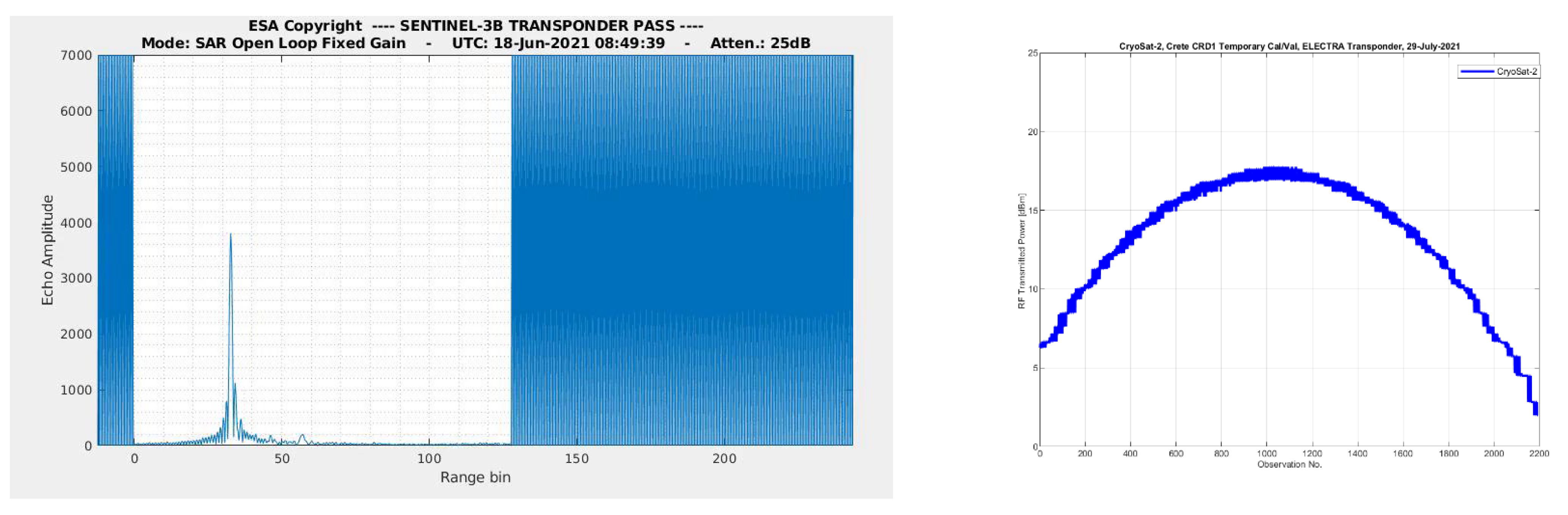
- Signal recording. The ELECTRA transponder is capable of recording signal power at 1 μs sampling steps at the output of its amplification stage (Figure 6).
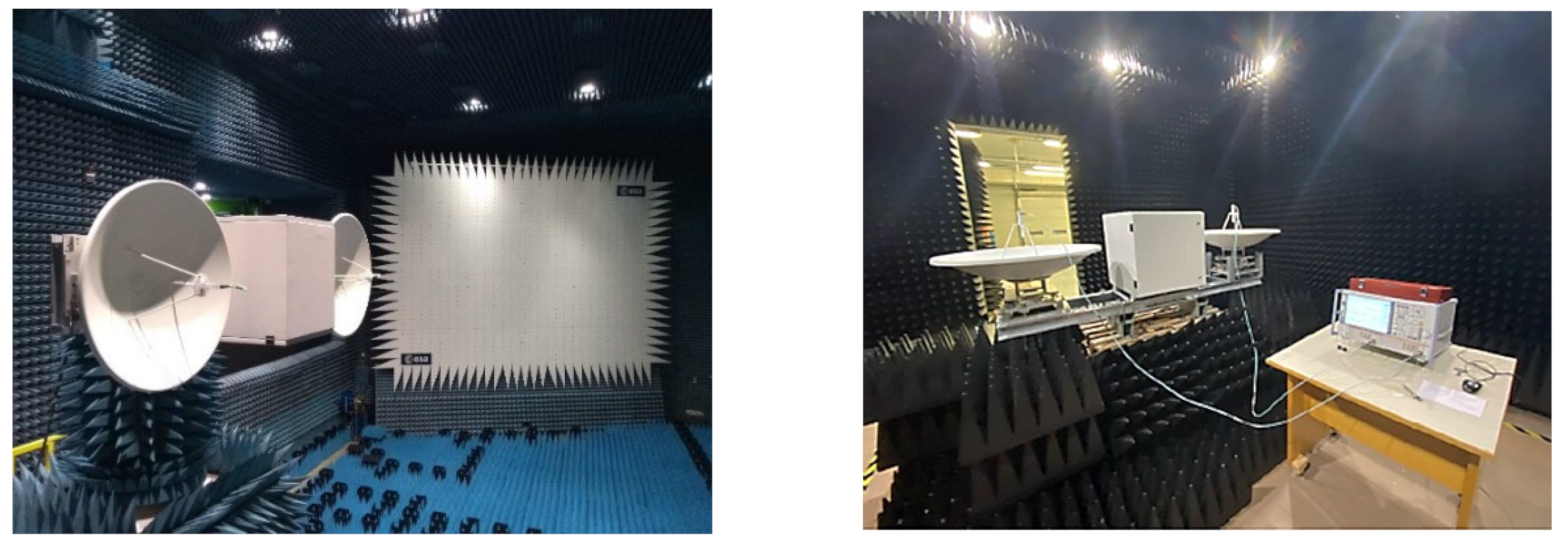
- Antenna isolation. Isolation measurement of transmit and receive transponder antennas together with their associated Radio Frequency (RF) cables (Figure 8). The isolation achieved was at the level of 110 dB.
- Antenna alignment. Measurements were performed to align the antennas to the boresight with an accuracy of about ±0.1° and characterize their radiation pattern after proper alignment.
- Amplifier stability. Two sets of tests for the stability of the integrated transponder with the RF Unit connected to the transmit and receive antennas were carried out. The first set was performed with the transponder at a steady state with the maximum amplifier gain. The second test was the same as the first but at a transient state; sending a pulse with a maximum amplifier gain of 80 dB, we were able to inspect for any signs of amplifier instability in the time domain. The stability of the amplifier chain was measured to ±0.1 dB.
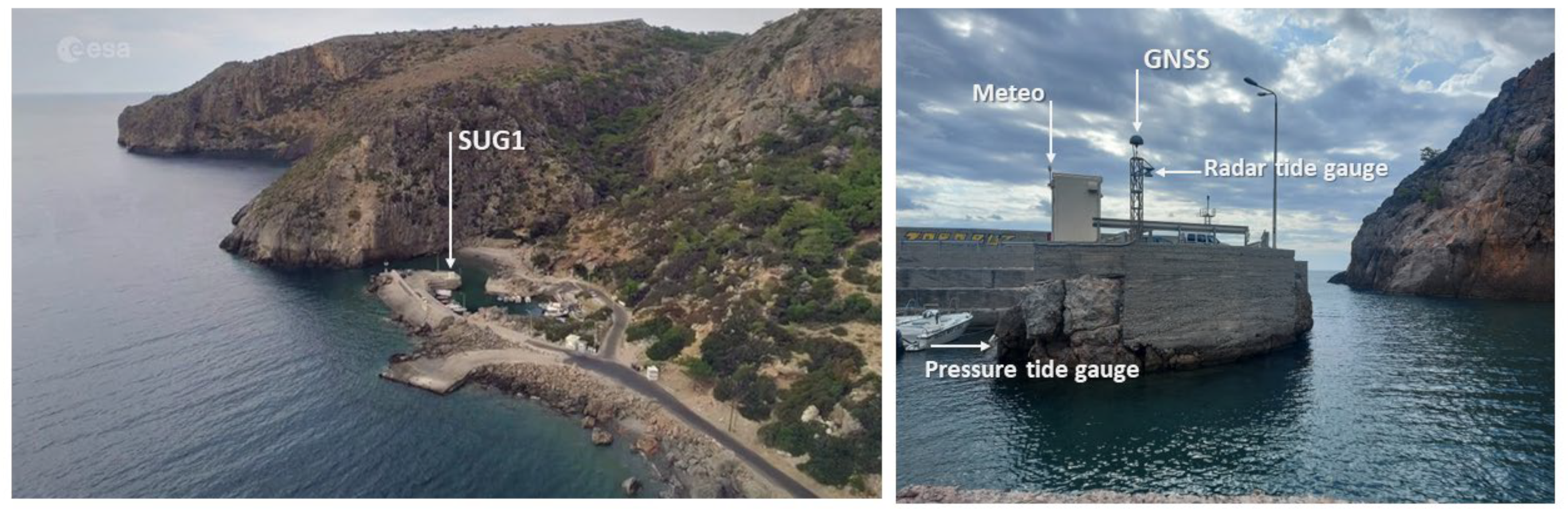
2.1.3. The GVD1 Transponder Cal/Val Site on Gavdos Island
2.2. The SUG1 Sea-Surface Cal/Val Site in Crete
2.3. The Overall PFAC Ground Reference Instrumentation
3. Quality Control of Ground Reference Observations and Satellite Products
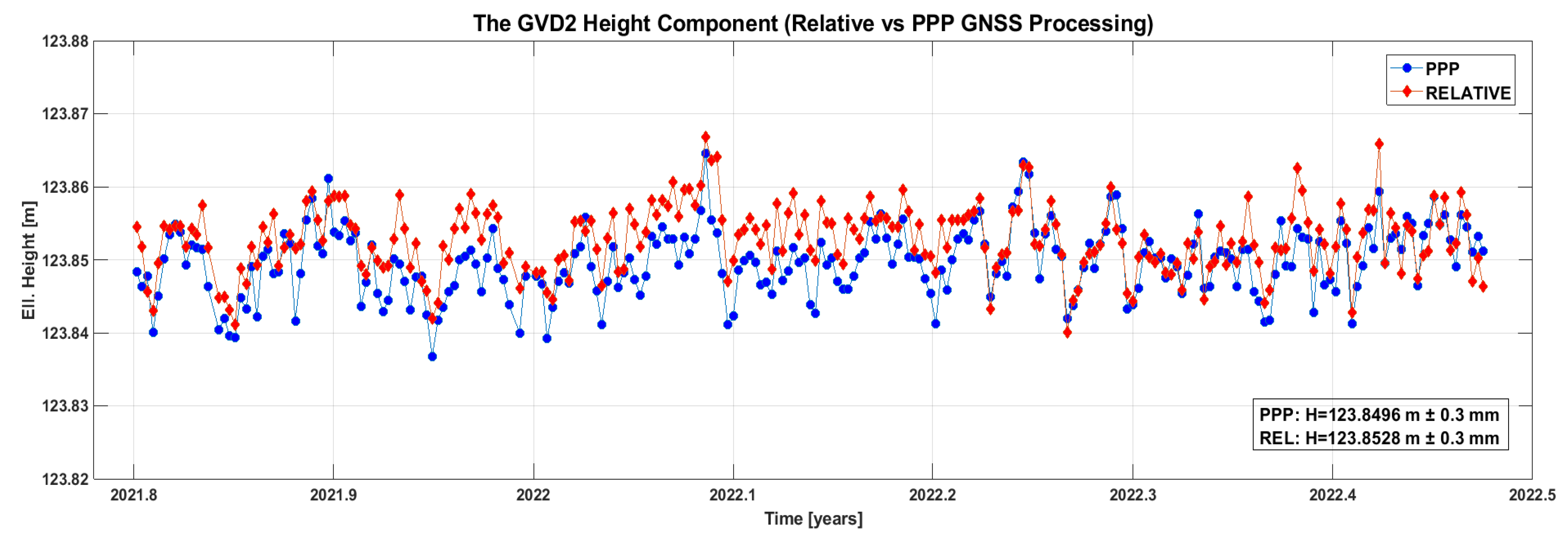
3.1. Absolute Positioning
3.2. Transponder Internal Delay
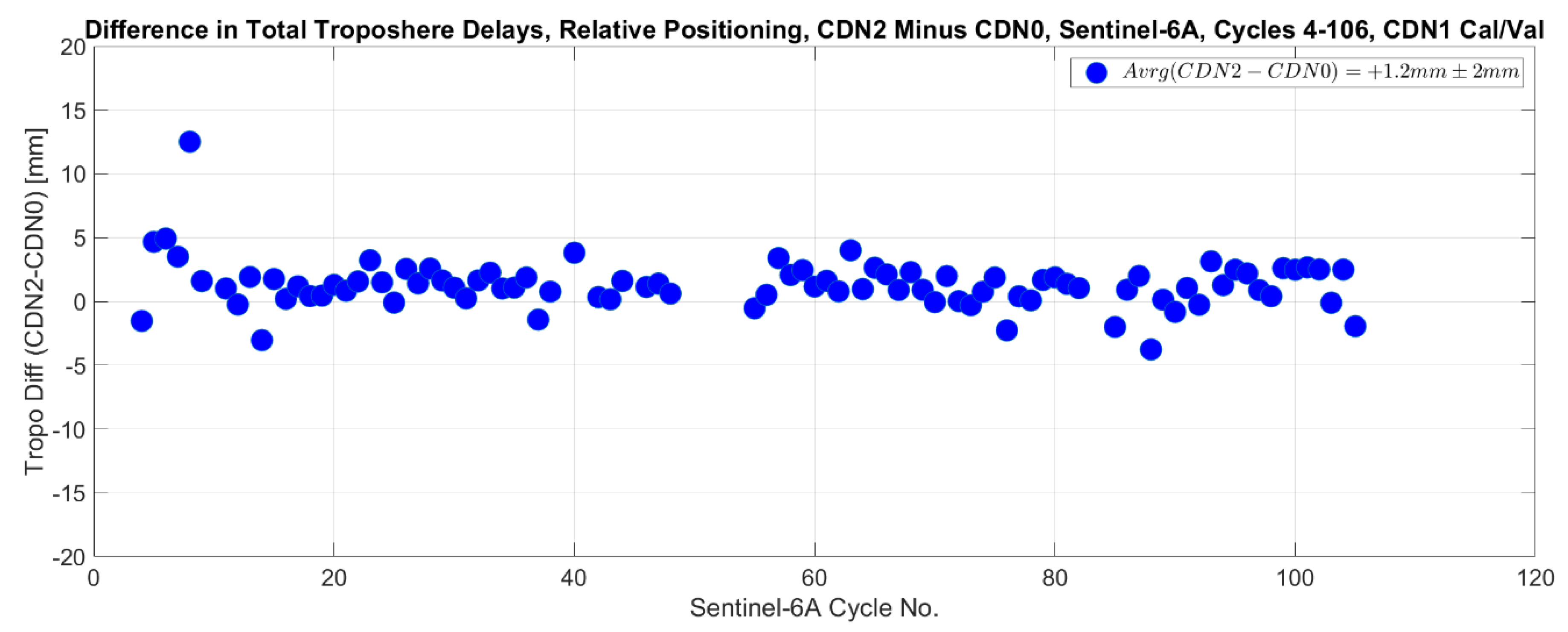
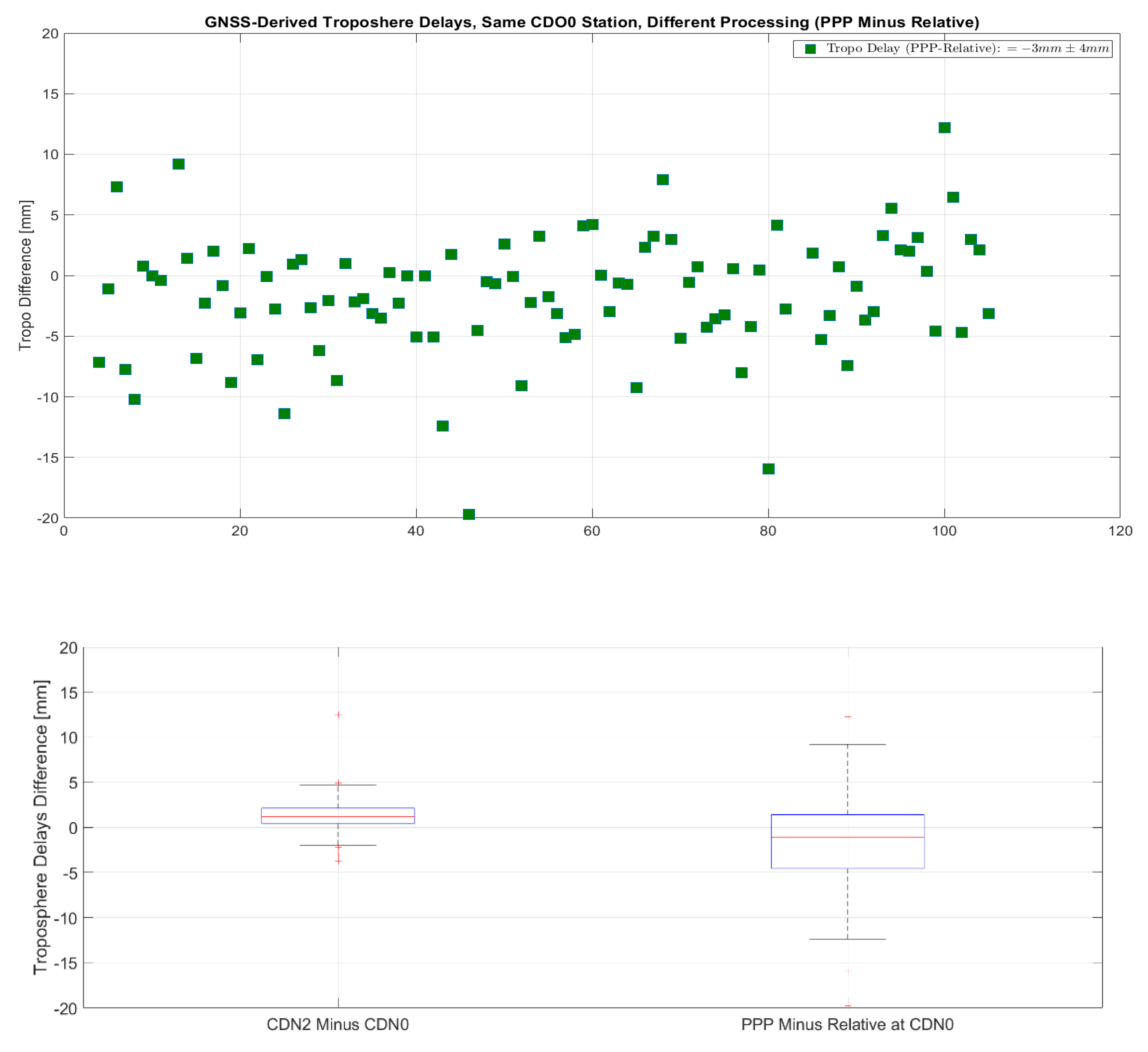
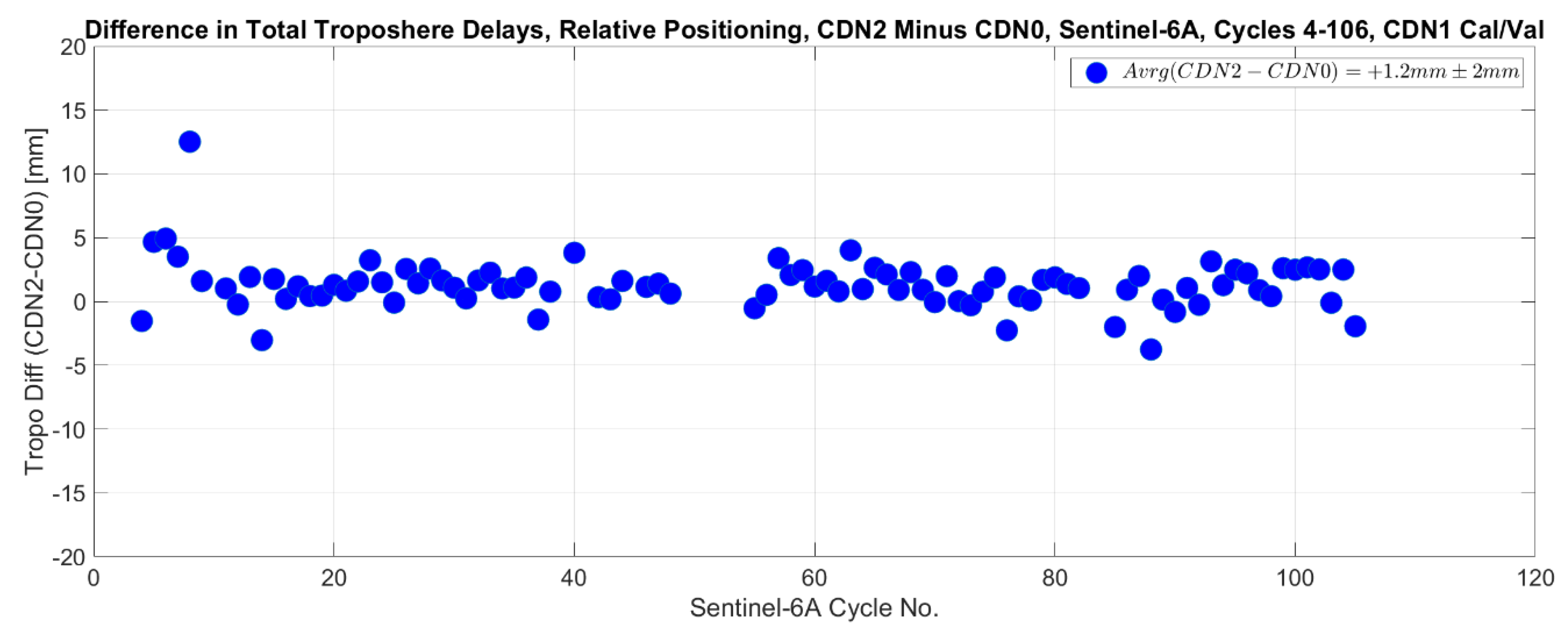
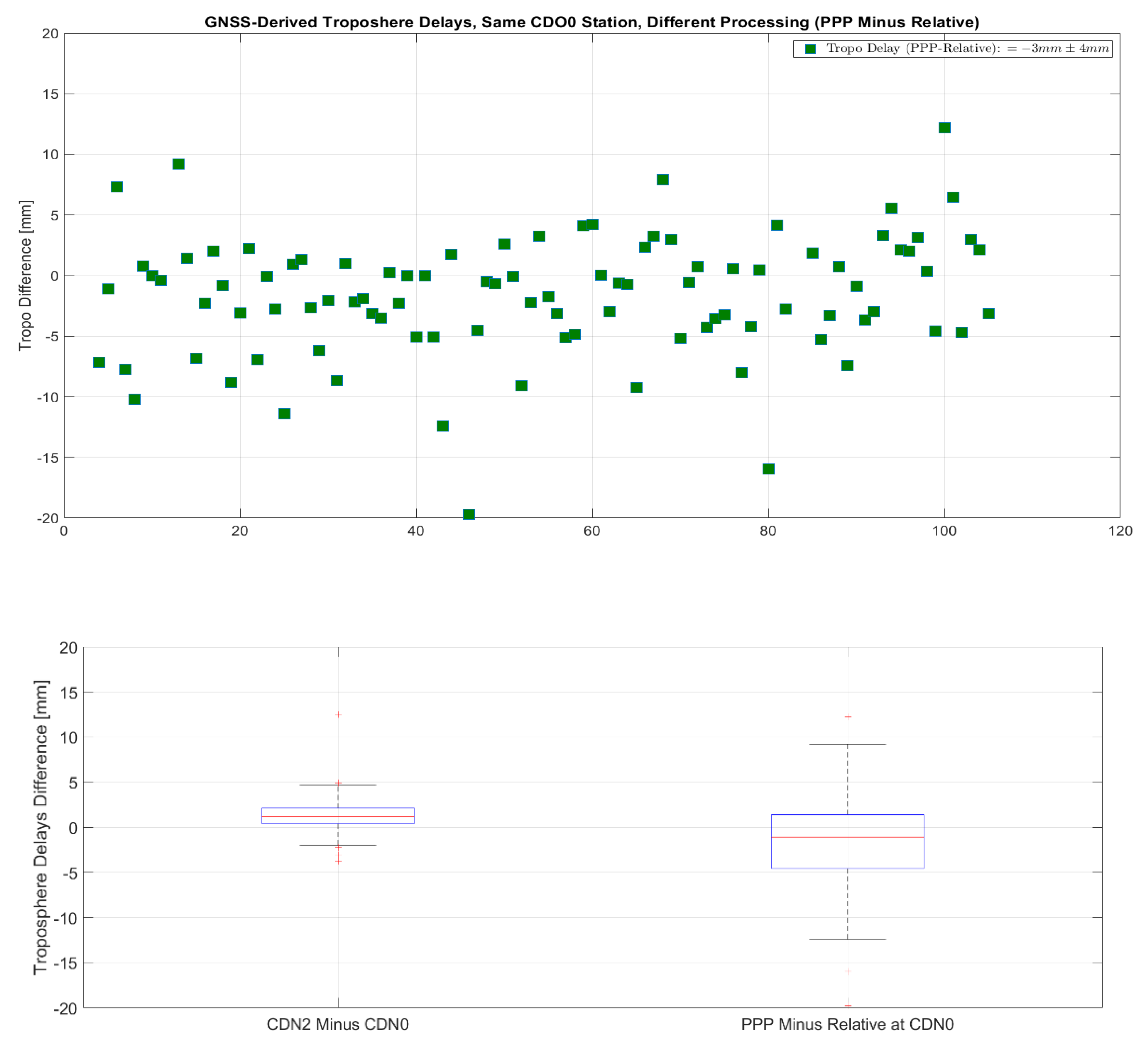
3.3. Atmospheric Delays of Satellite Signals
3.4. Asymmetry of the Transponder-Satellite Waveform
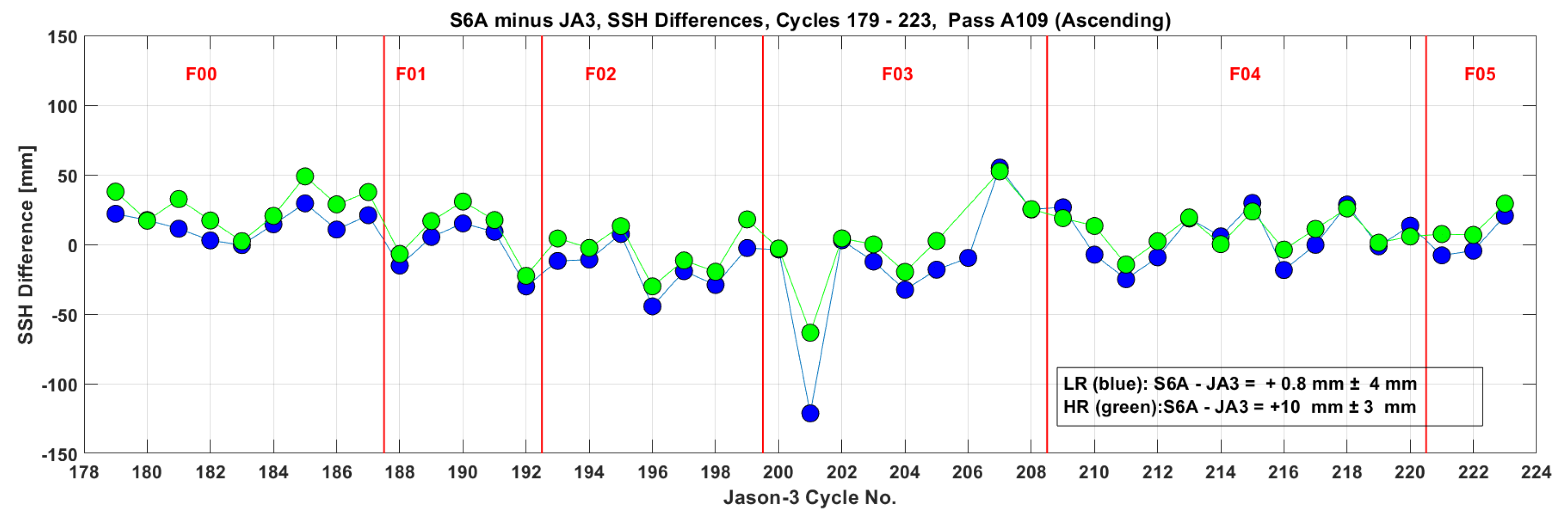
- The waveform along the ascending orbit A109, with its two sidelobes, appears symmetric around the mainlobe. The difference in power between the left and the right sidelobes is of the order of 0.01 dB. Certainly, there are cases wherein this power difference in sidelobes, laid astride the mainlobe, is more than 0.01 dB in some cycles, but as a general rule, no major shift for the location of the mainlobe is anticipated along this ascending orbit A109.
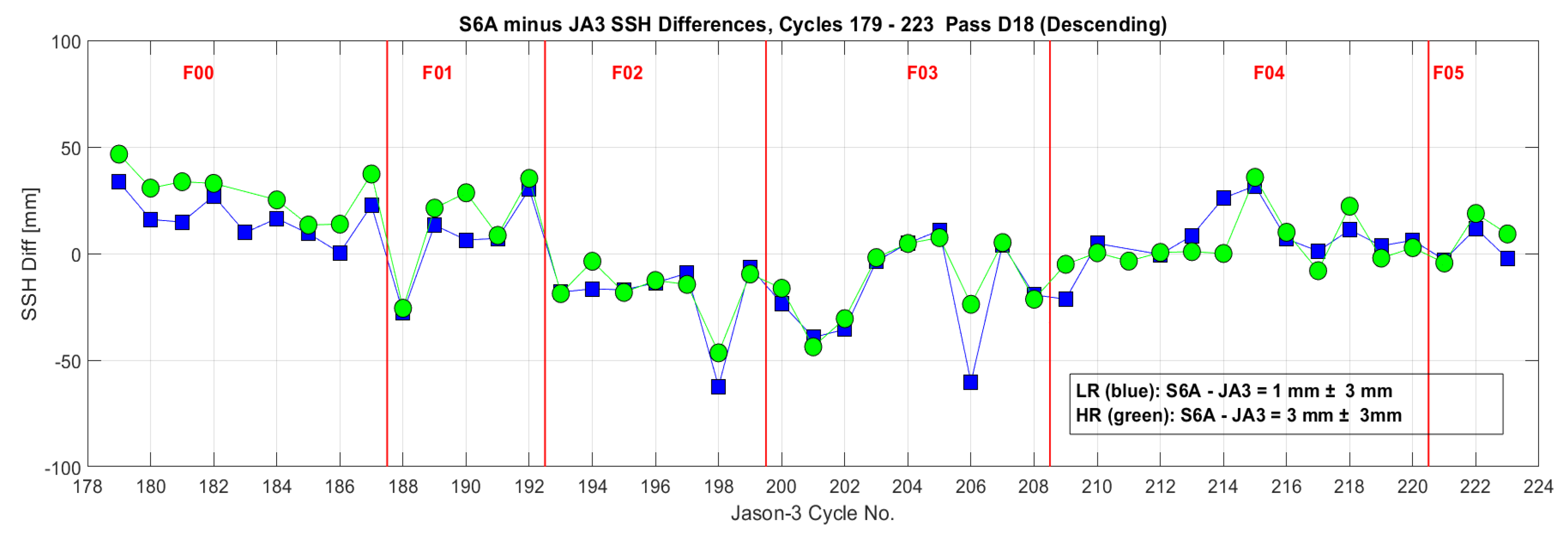
- On the other hand, the waveform along the descending orbit D18 appears asymmetric with a difference in power between left and right sidelobes of the order of 3.77 dB, on average. This creates an asymmetry of the mainlobe shape and requires correction, as there is a shift in the origin of range measurement. The mainlobe asymmetry originates from interference generated because of the transponder antenna array with respect to the satellite pass and it happens when the transponder antenna array is almost parallel to the descending orbit. No such case occurs for the ascending orbit A109, where it creates an angle of about 60 degrees with the transponder antenna array.
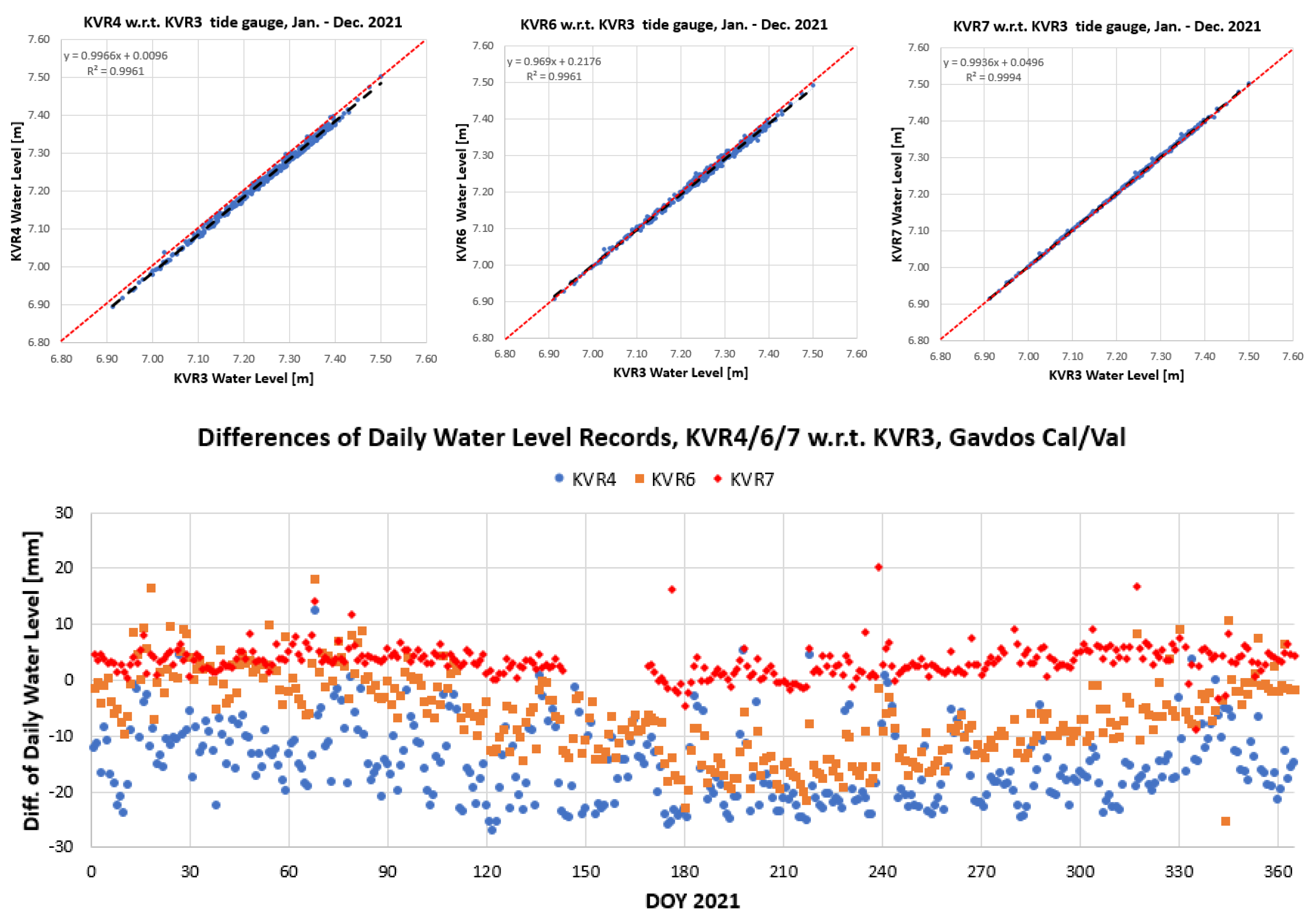
3.5. Sea-Surface Height at the Tide Gauge Location
3.5.1. Determination of the Zero-Point of a Tide Gauge with Camera Monitoring
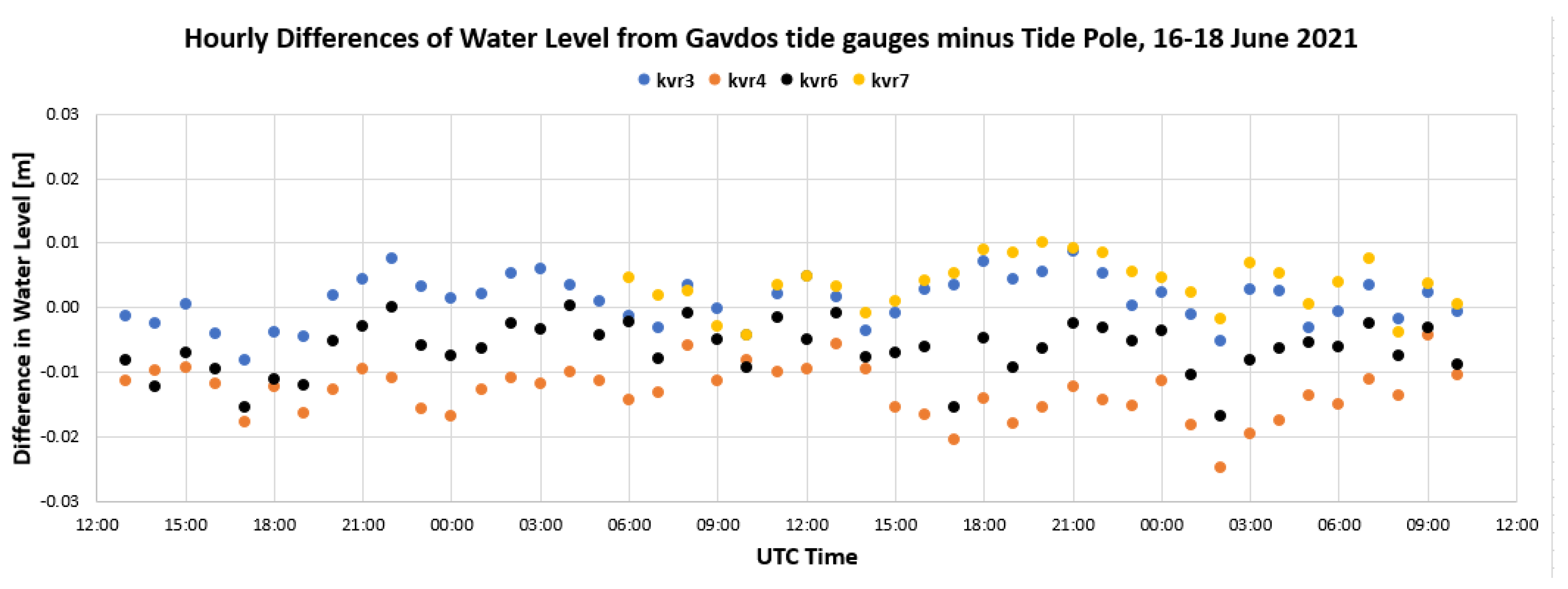
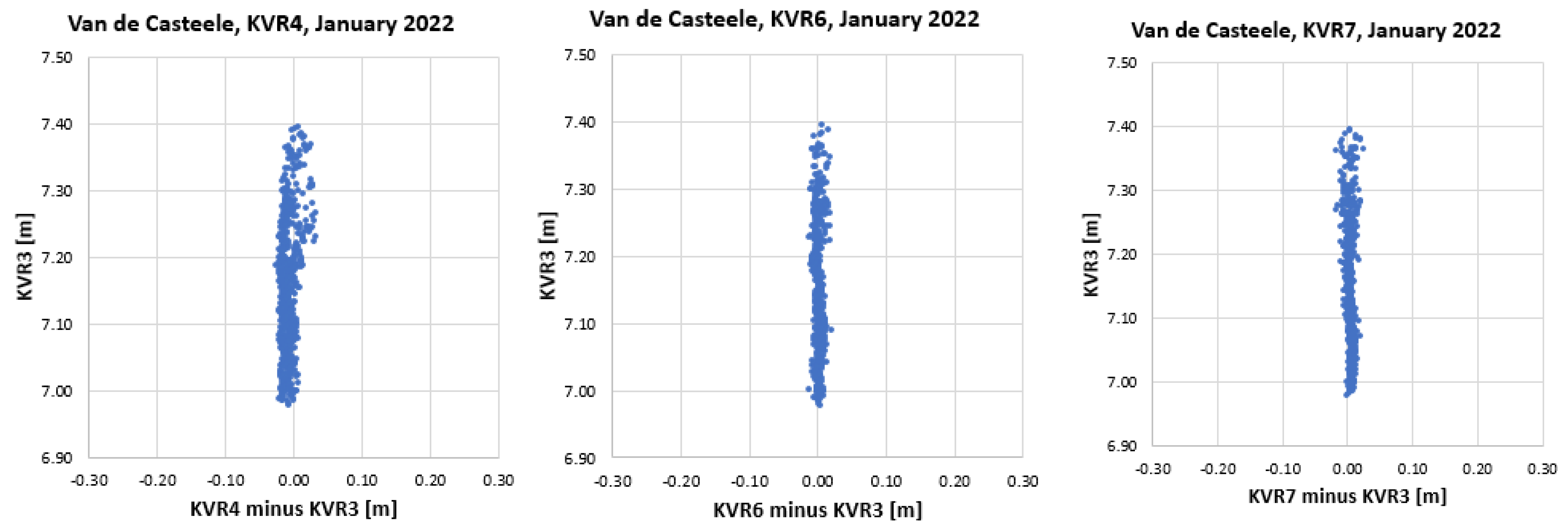
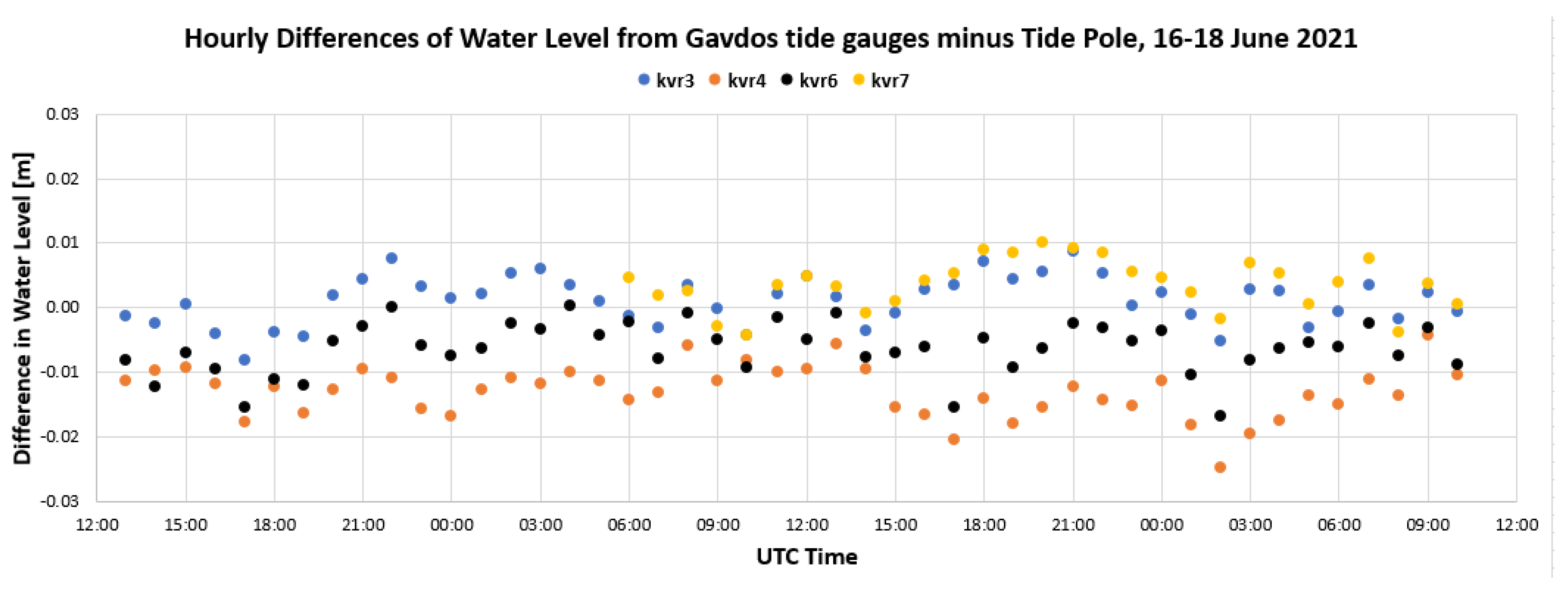
3.5.2. Validation with a Reference Sensor
3.5.3. Final Sea-Surface Height
3.6. Reference Surfaces for Sea-Surface Calibration
3.7. Processing Baseline of Satellite Products
3.8. Fiducial Reference Measurement Uncertainty
4. Results
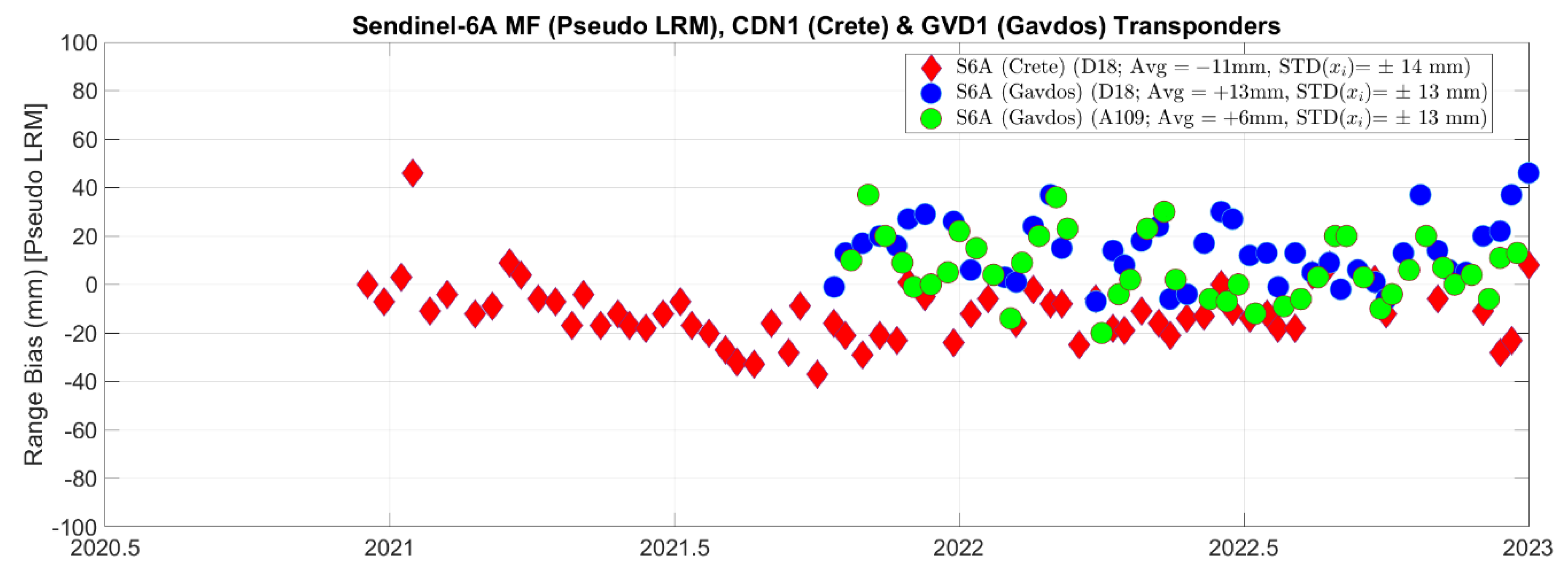
4.1. Sentinel-6 MF Transponder Cal/Val Results
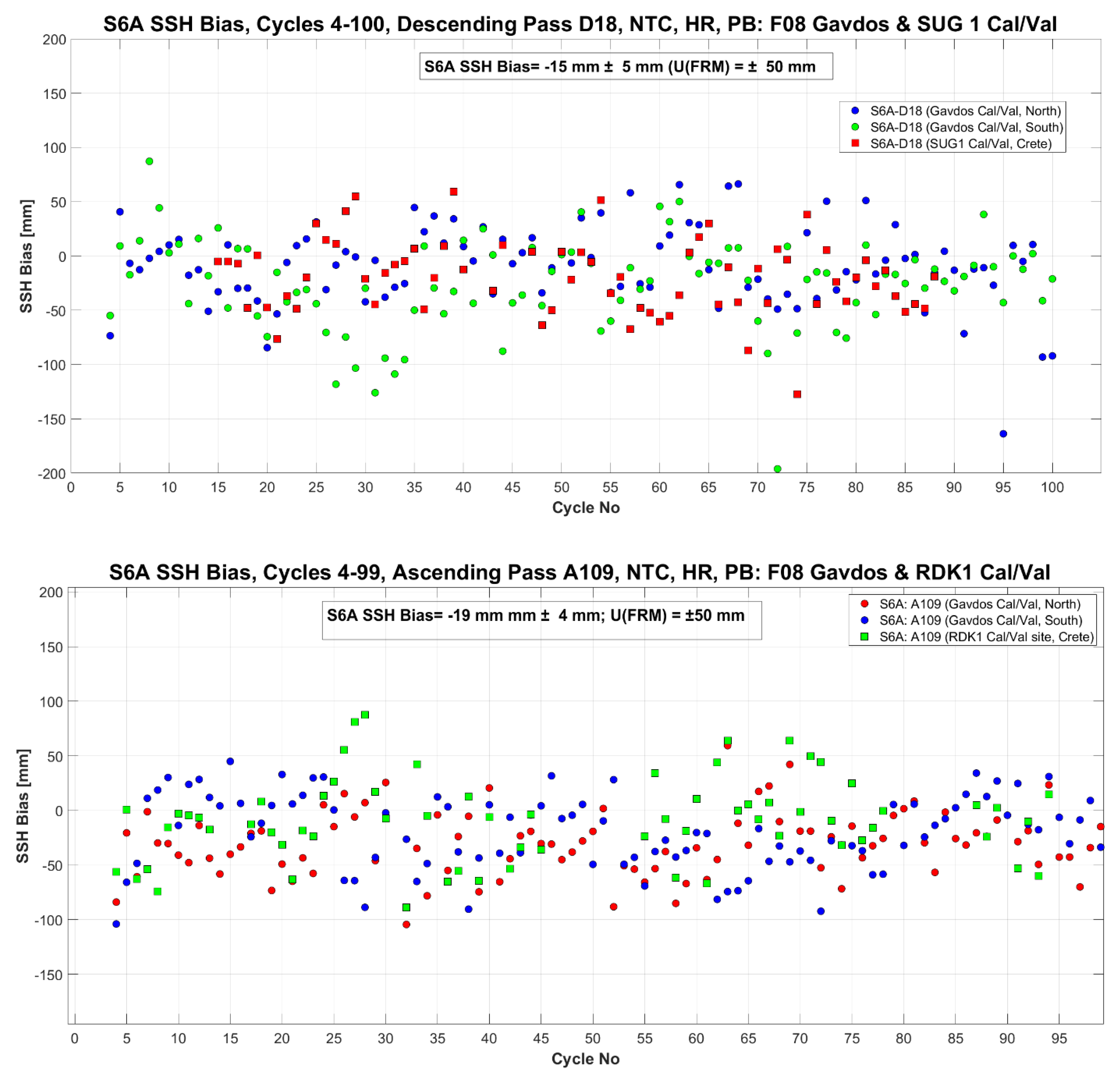
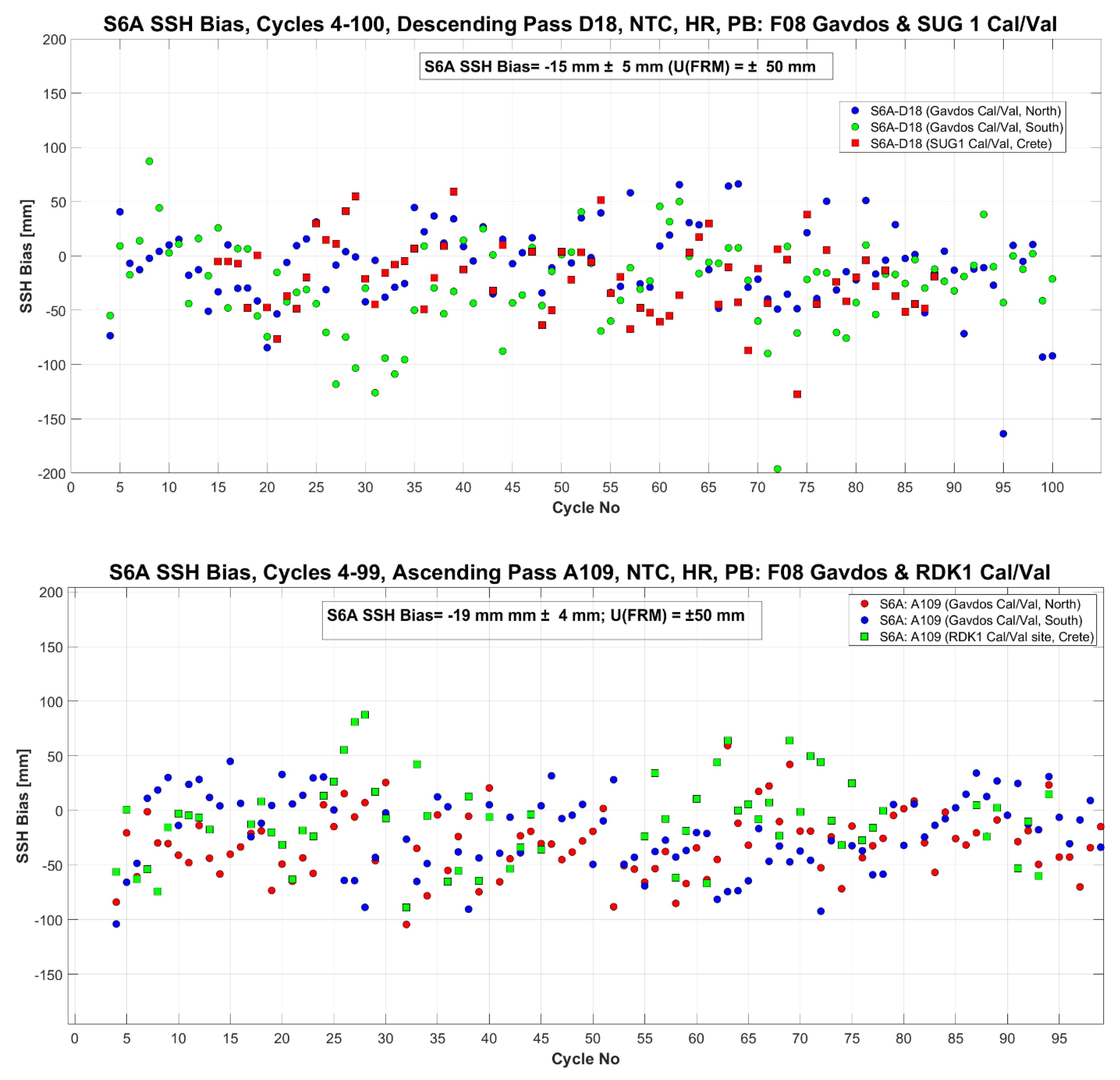
4.2. Sentinel-6 MF Sea-Surface Cal/Val Results
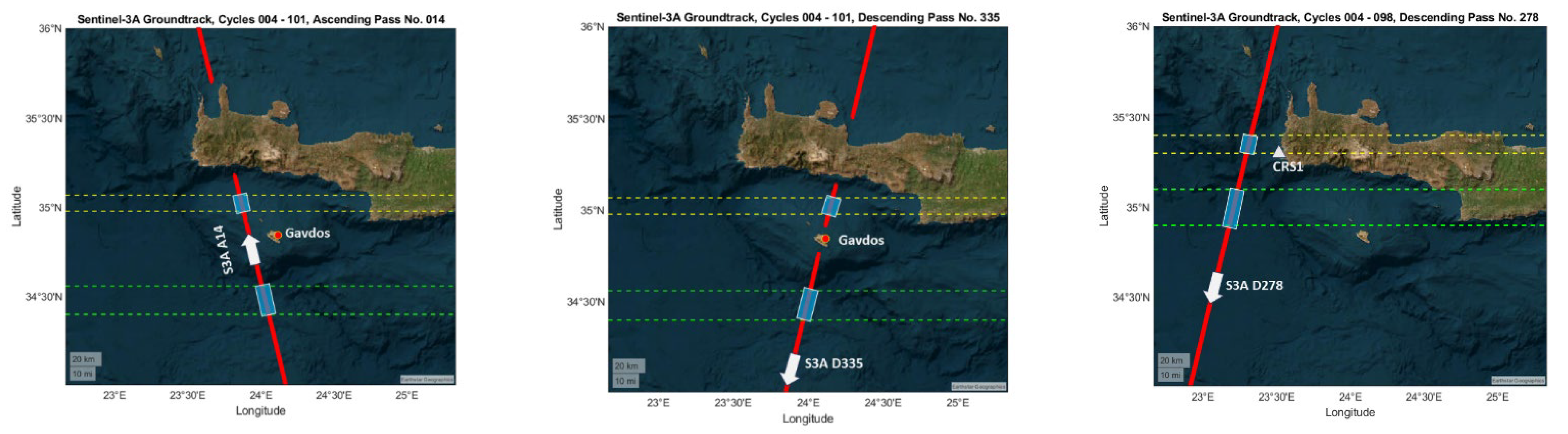
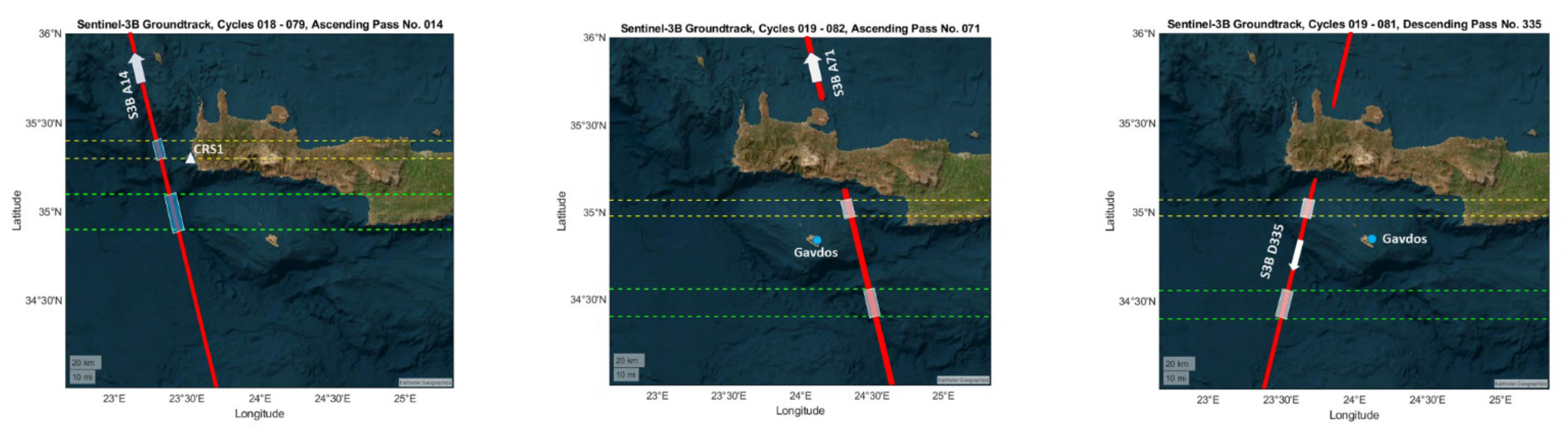
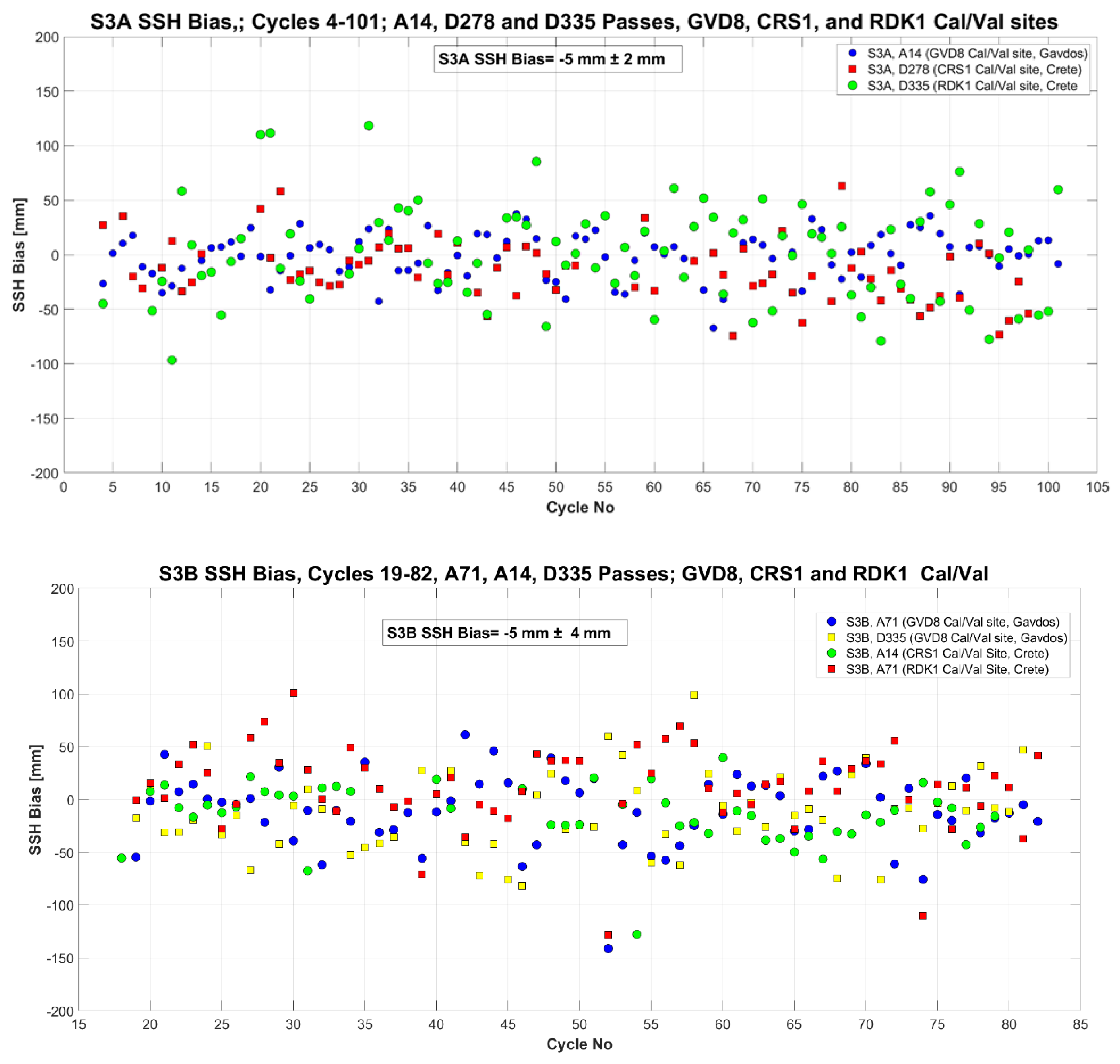
4.3. Sentinel-3 Transponder Cal/Val Results
4.4. Sentinel-3 Sea-Surface Cal/Val Results
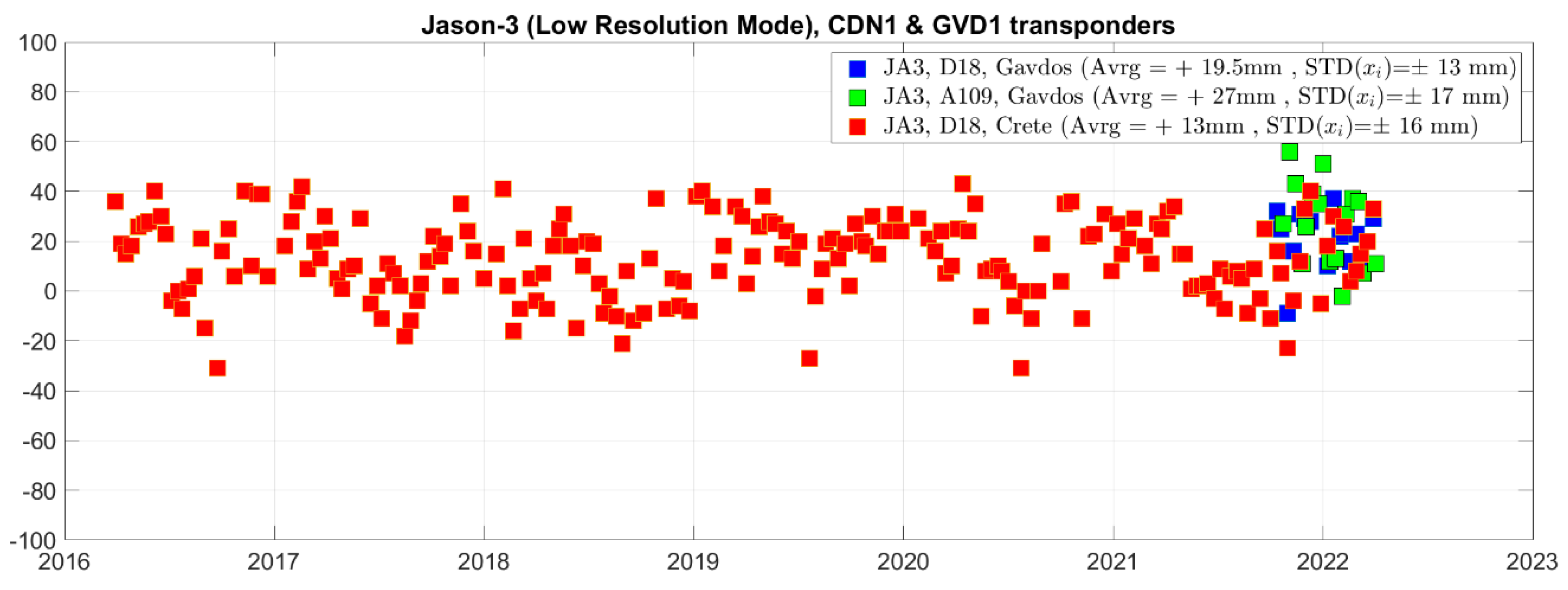
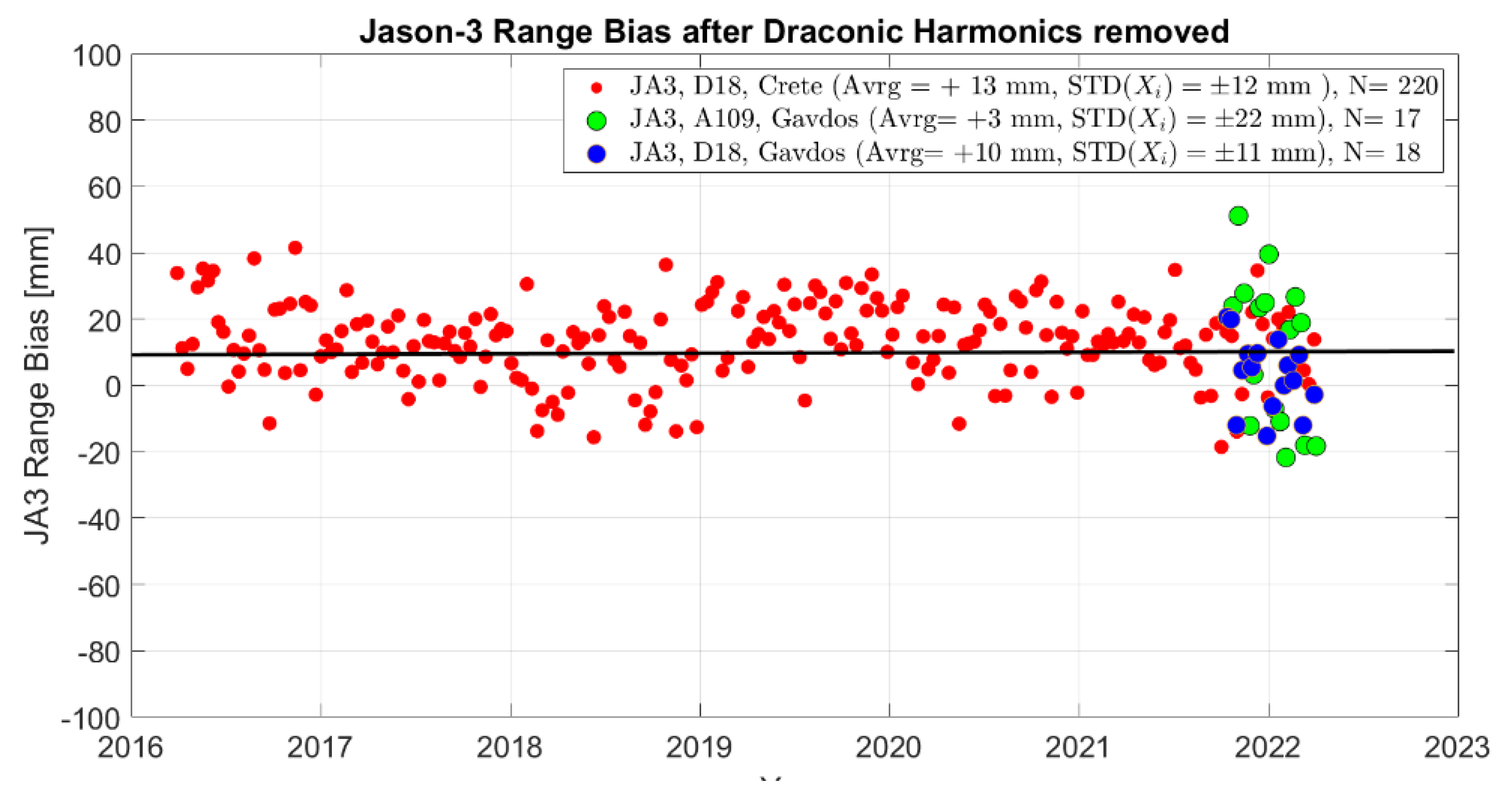
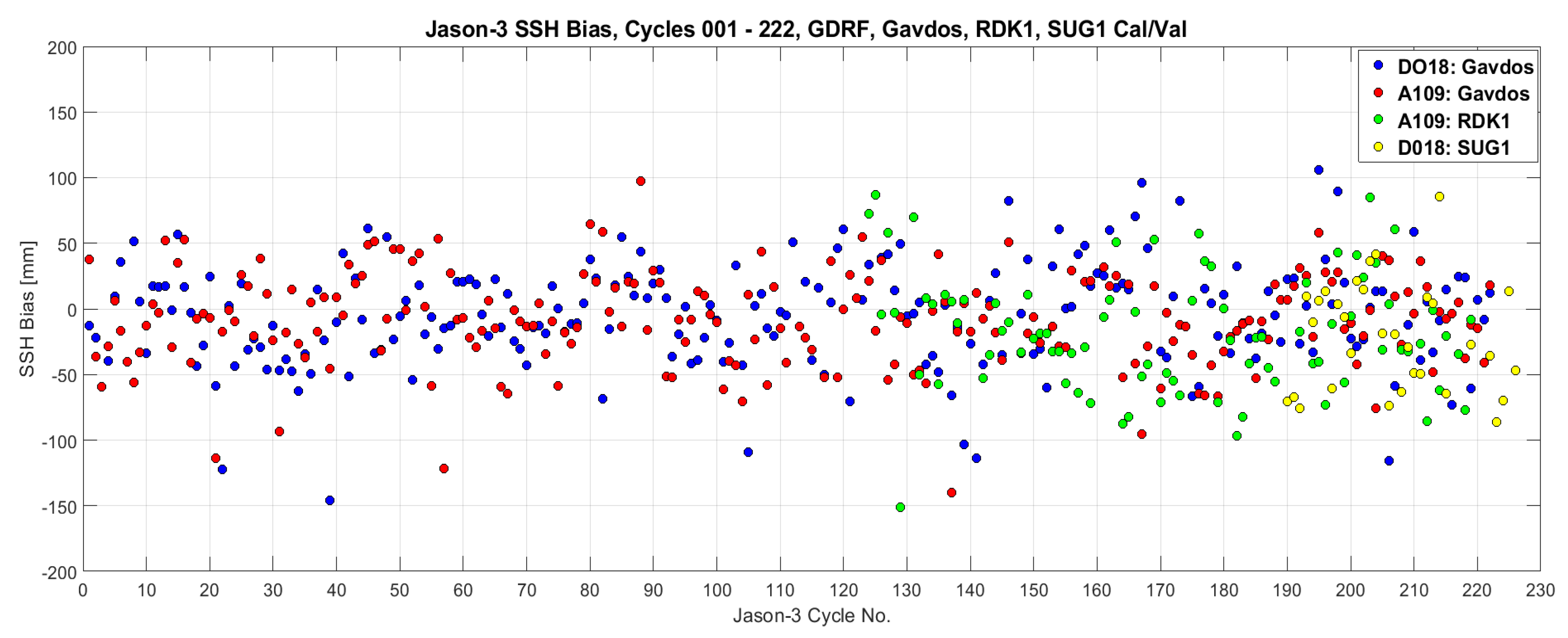
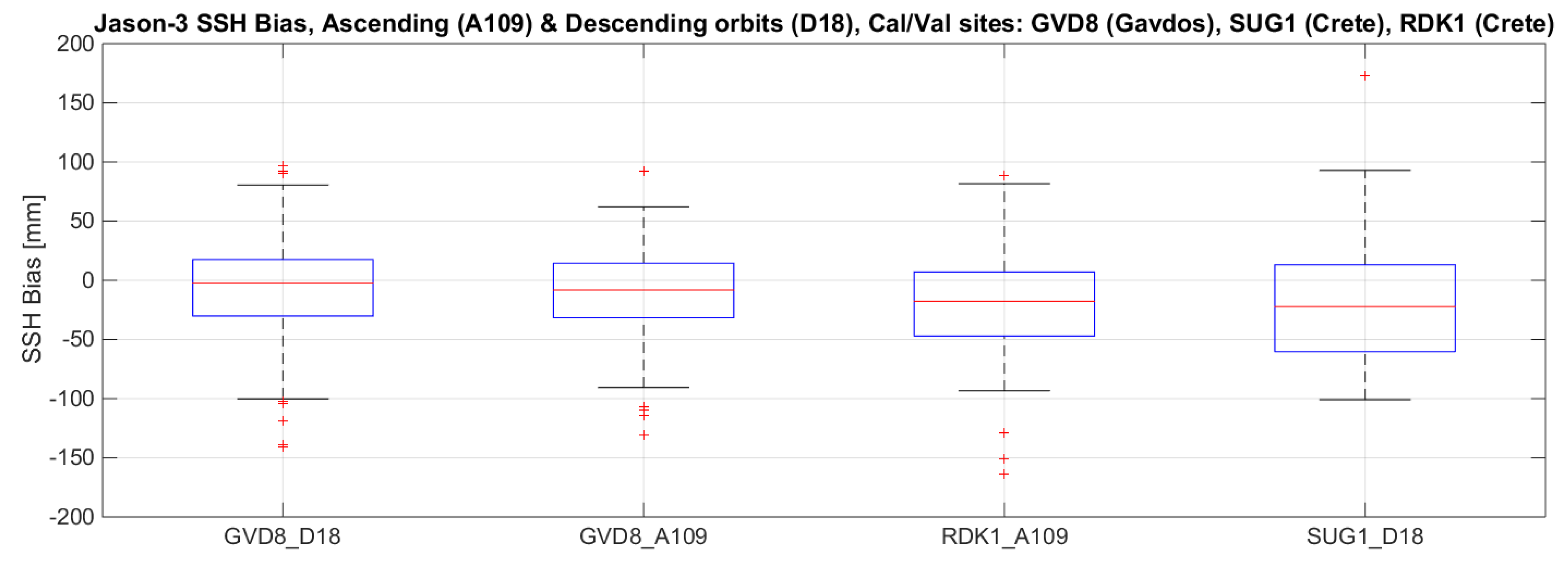
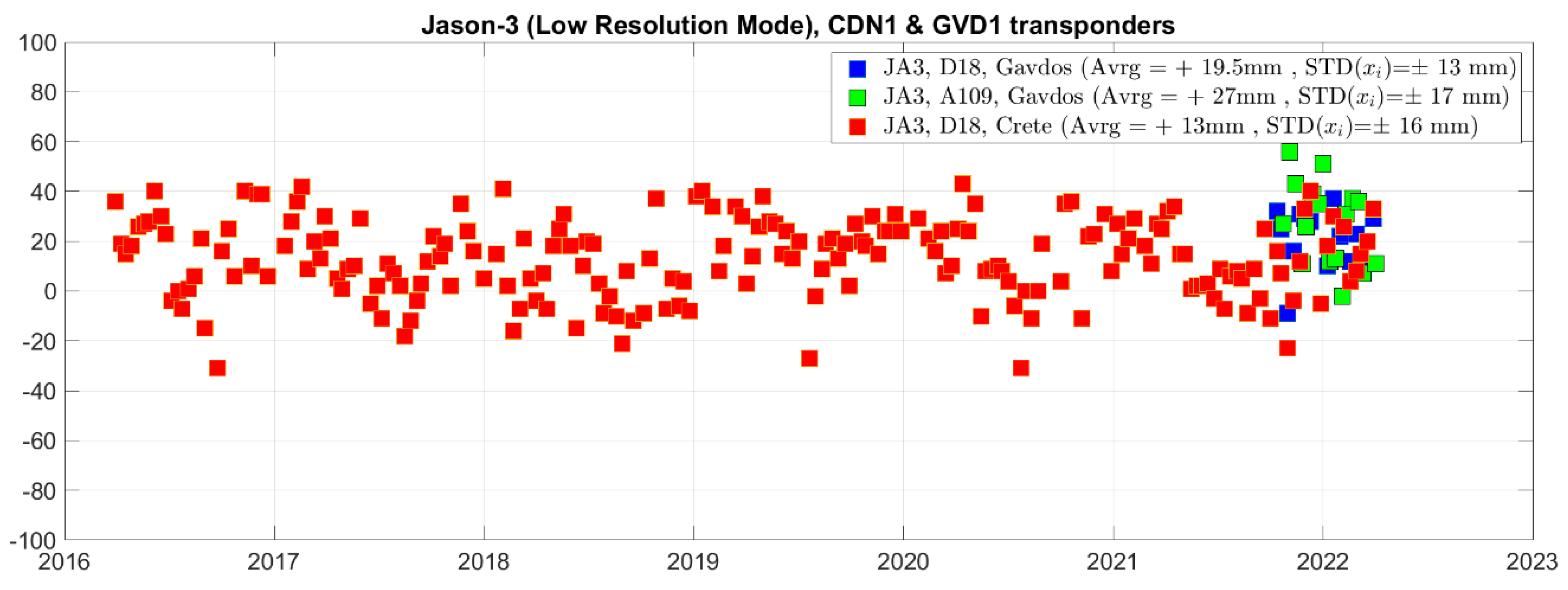
4.5. Jason-3 Cal/Val Results
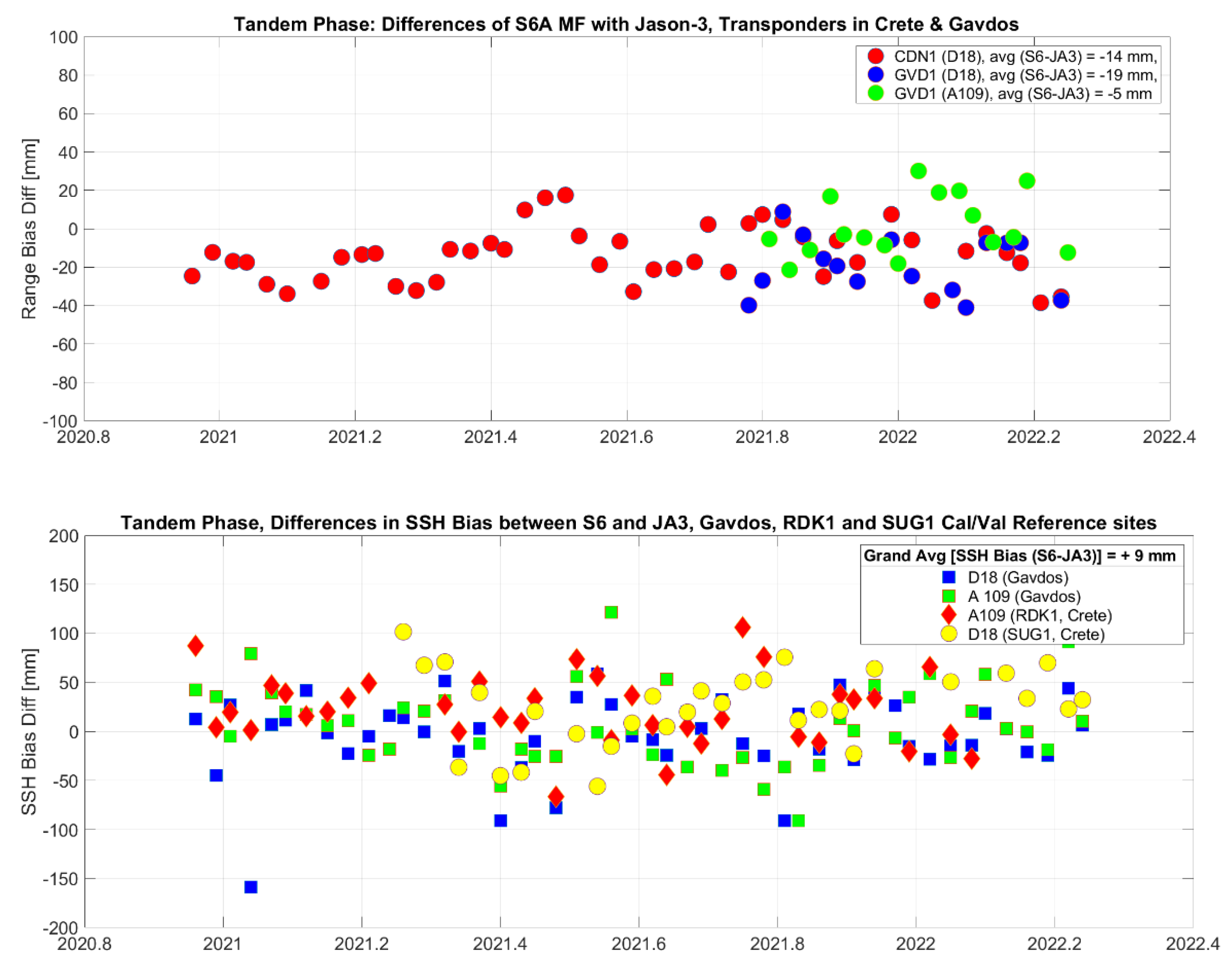
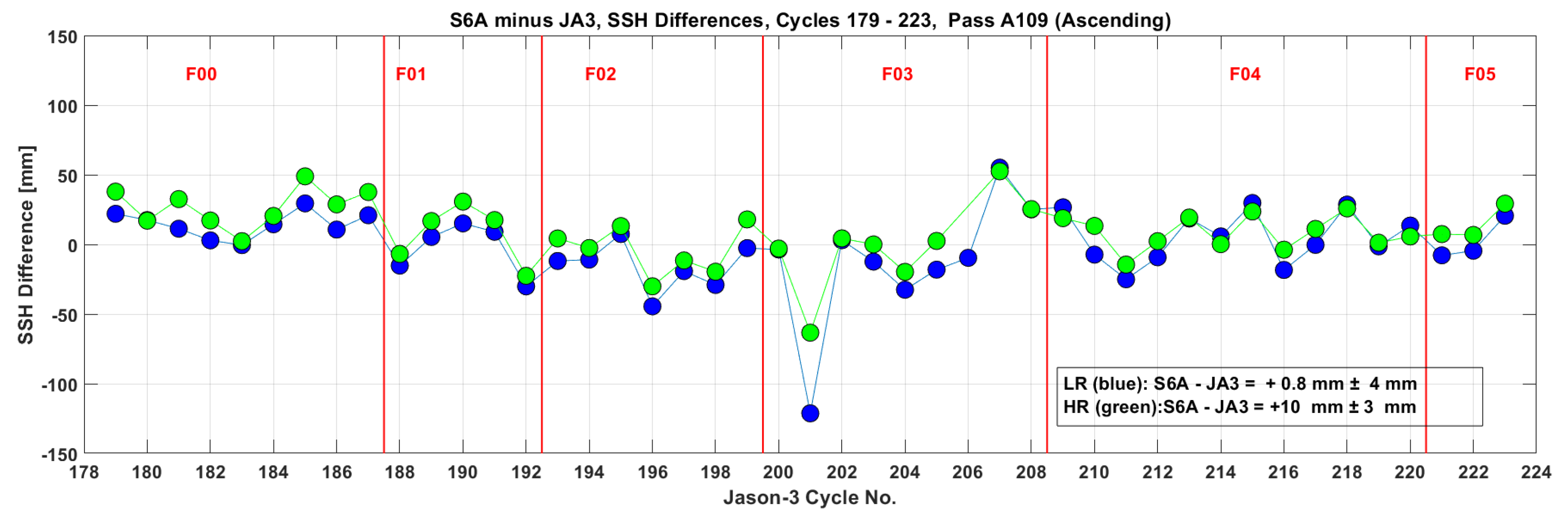
4.6. Jason-3 in Tandem with Sentinel-6 MF Cal/Val Results
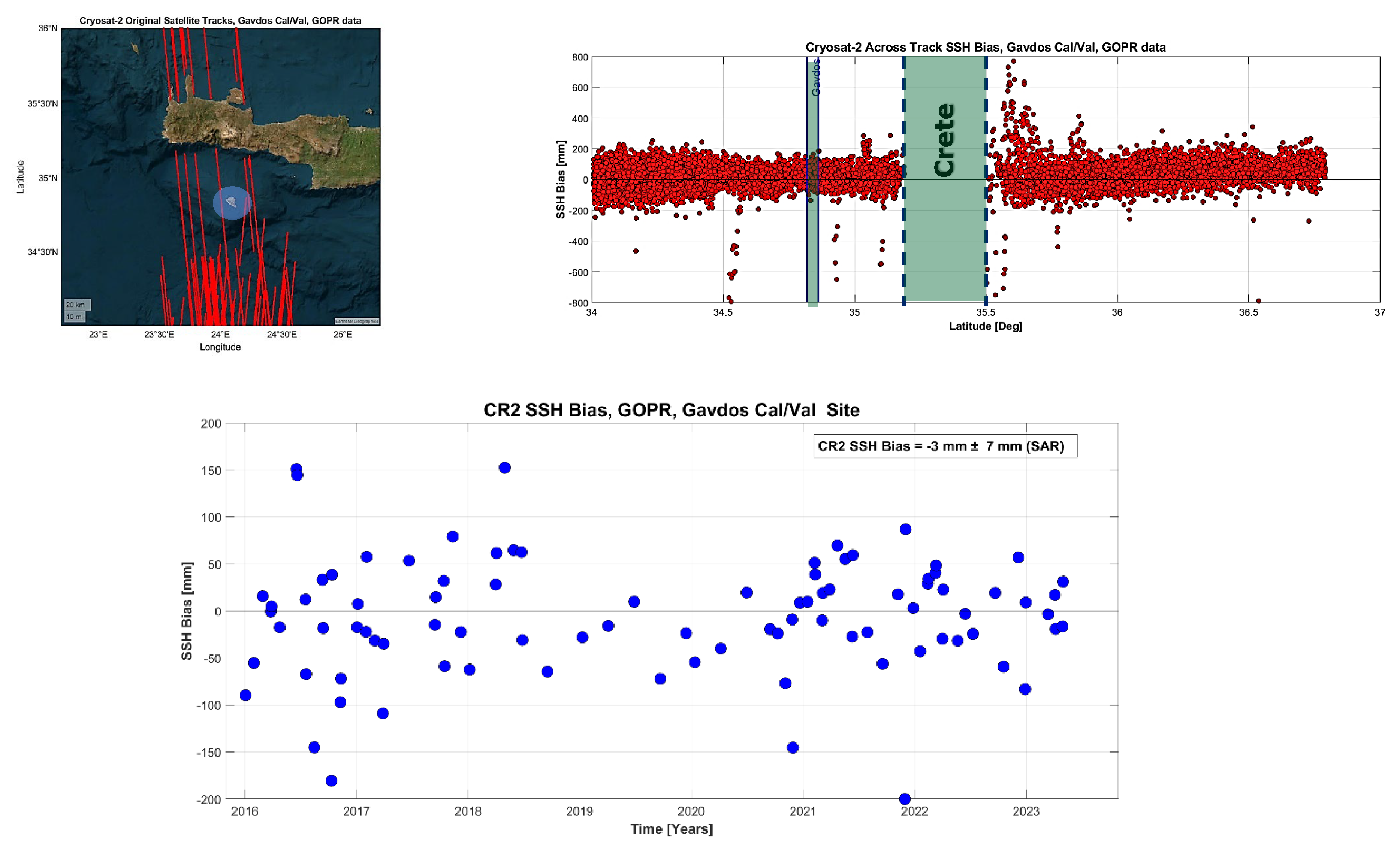
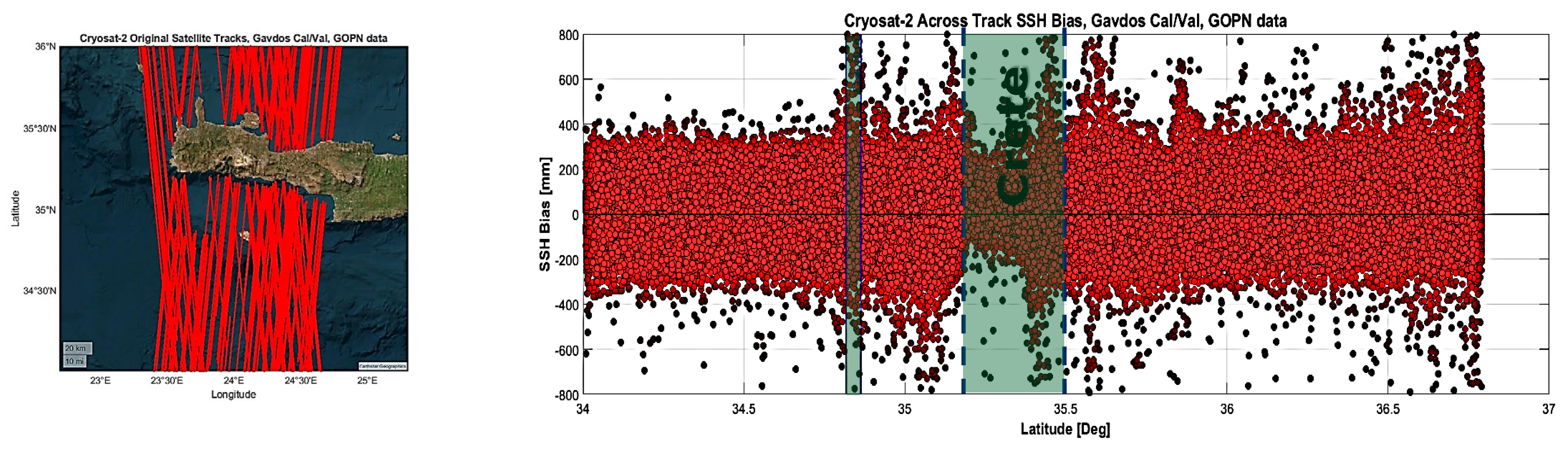
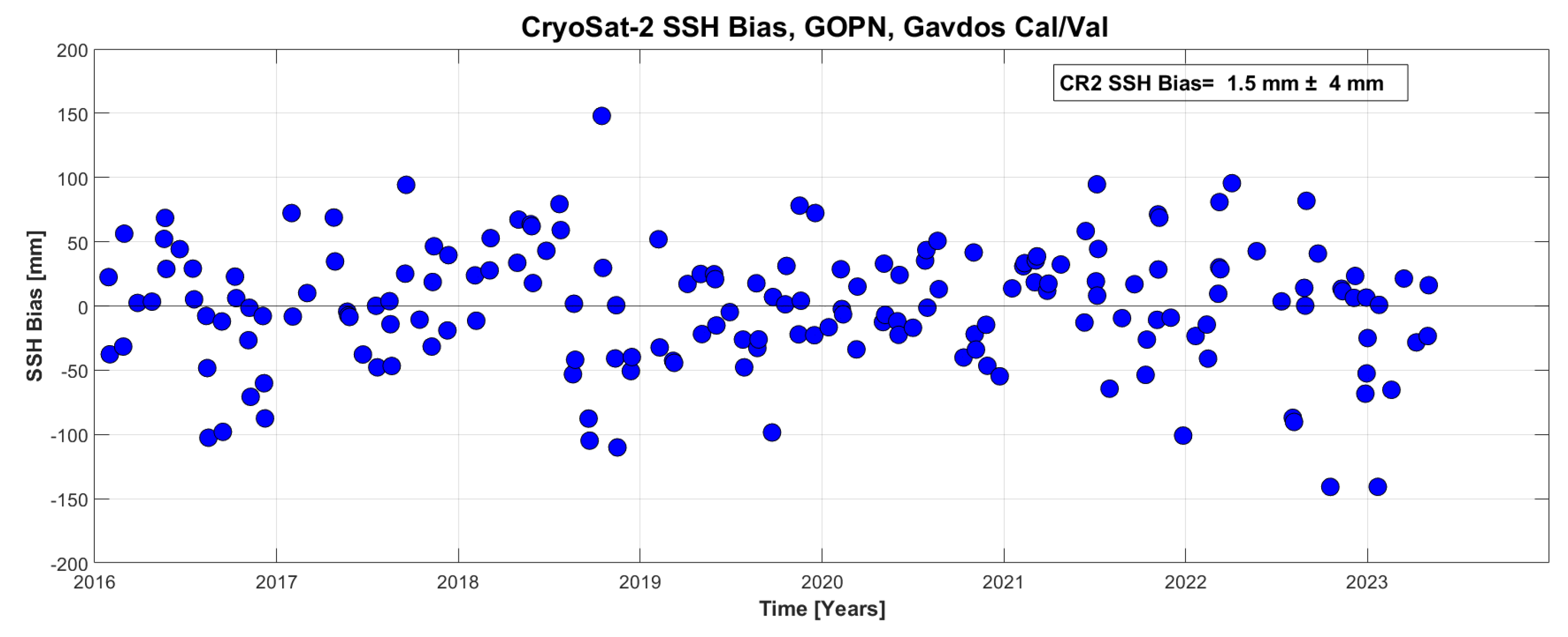
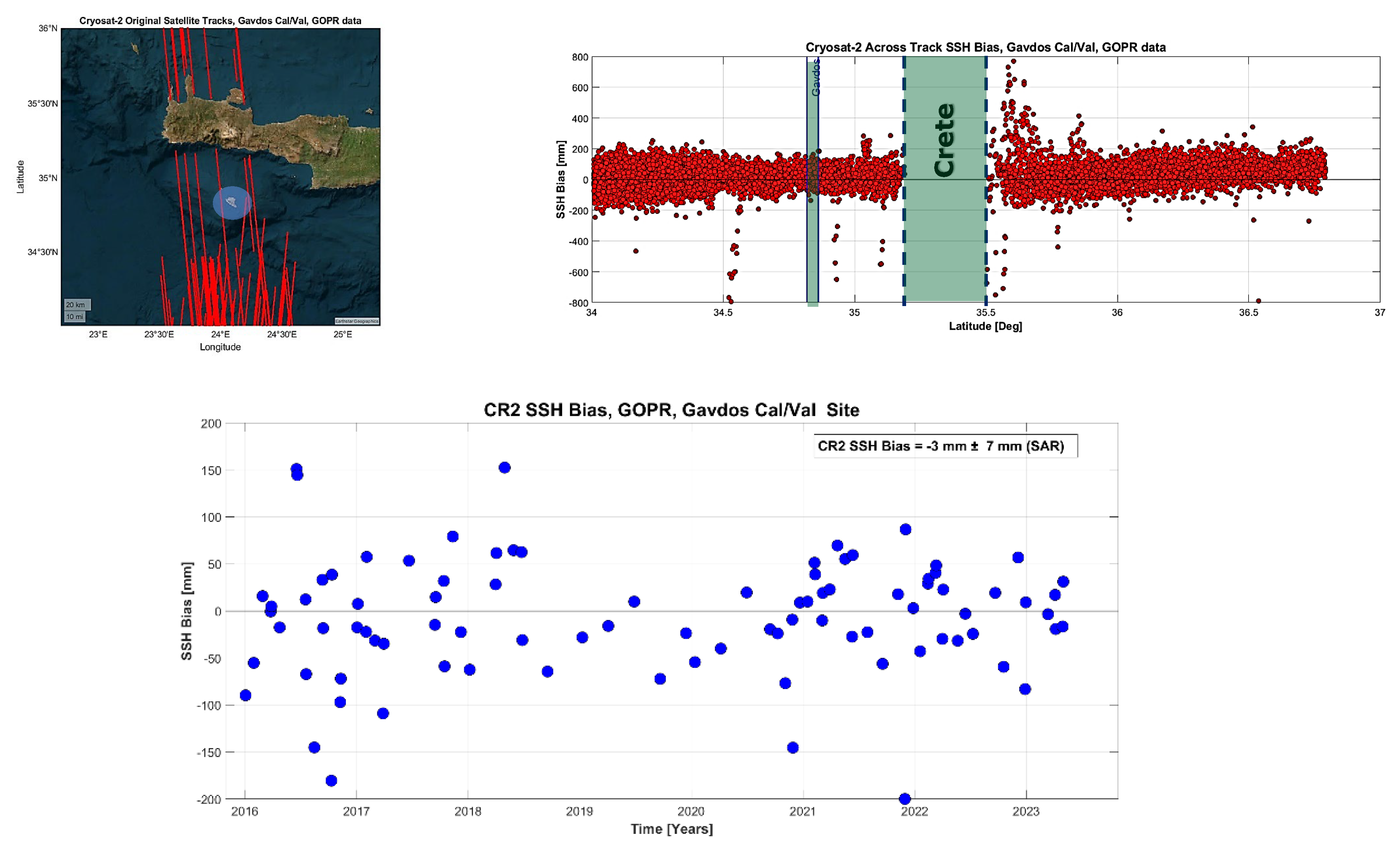
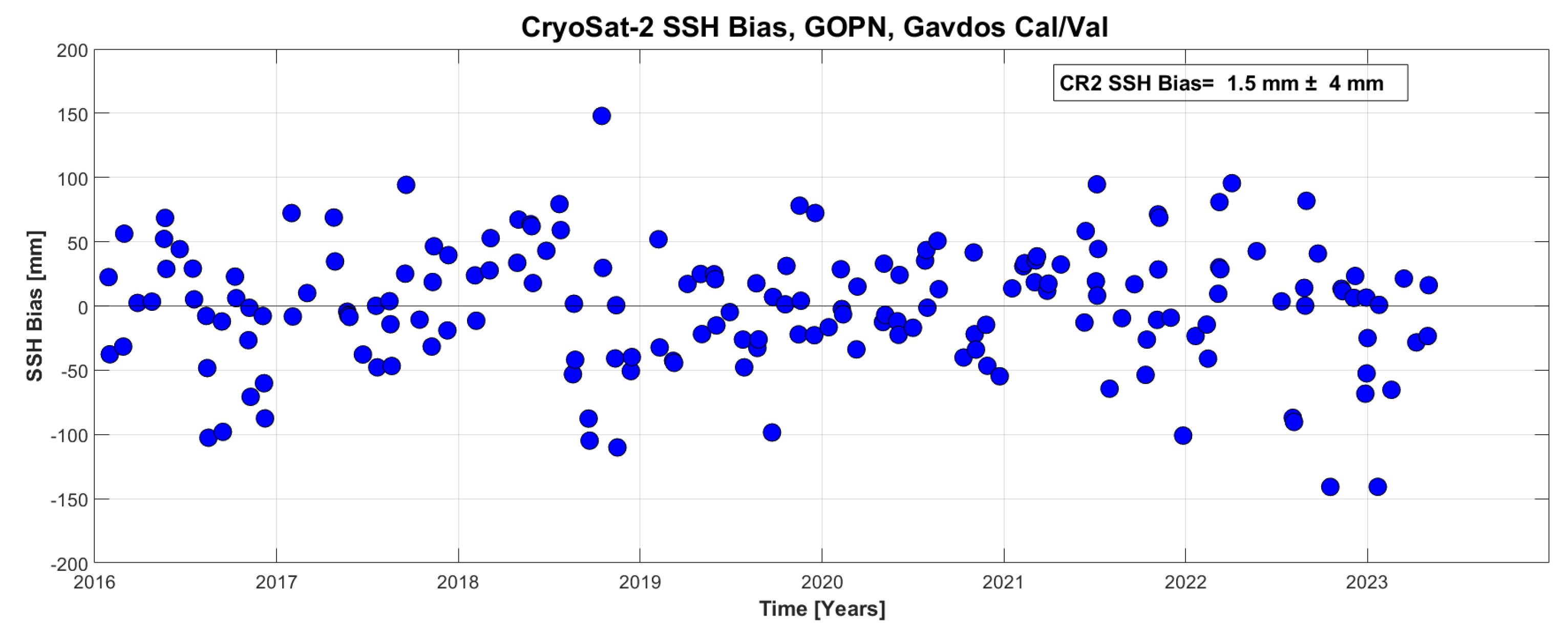
4.7. CryoSat-2 Sea-Surface Cal/Val Results
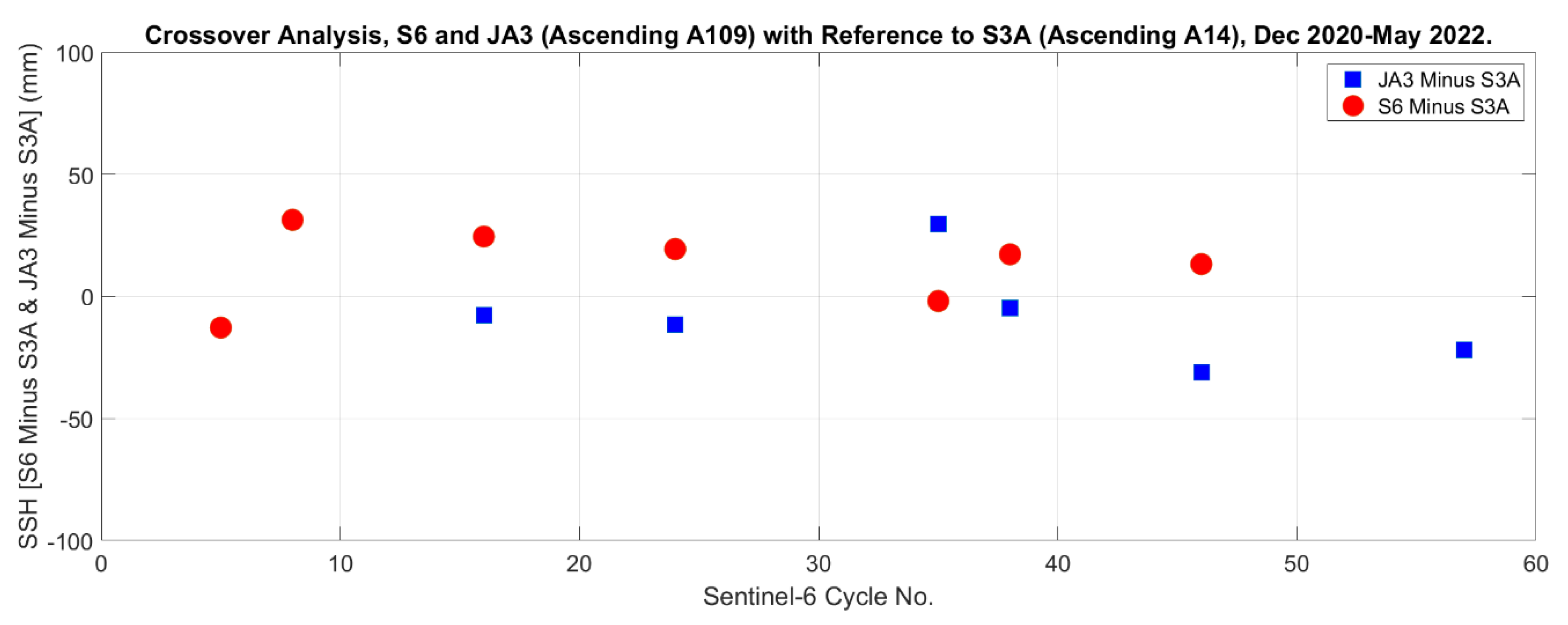
4.8. Crossover Analysis over the Sea Surface
- Single out passes of those satellites under examination, which converge at a sea location and contain a similar sea state and conditions; the last requirement is achieved by constraining the temporal difference of observations to be less than two days (48 h);
- Interpolate neighboring altimeter data to estimate observations at the sought location of the crossover location;
- Determine the geodetic coordinates of the crossover, as in general, it happens to be a point lying not exactly at the typical sequence of satellite observations (i.e., about 300 m, when 20 Hz sampling is used), but somewhere in between them;
- Calculate the sea-surface heights at the crossover location for each altimeter, using a two-dimensional fitting of the original observations, and within a water stripe of 8 km on either side of the actual ground track;
- Compare the two satellite altimeter observations and determine the relative bias at the crossover location.
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- International Altimetry Team. Altimetry for the future: Building on 25 years of progress. Adv. Space Res. 2021, 68, 319–363. [Google Scholar] [CrossRef]
- Sterckx, S.; Brown, I.; Kääb, A.; Krol, M.; Morrow, R.; Veefkind, P.; Boersma, K.F.; De Mazière, M.; Fox, N.; Thorne, P. Towards a European Cal/Val service for earth observation. Int. J. Remote Sens. 2020, 41, 4496–4511. [Google Scholar] [CrossRef]
- Francis, C.R.; Caporali, A.; Cavaleri, L.; Cenci, A.; Ciotto, P.; Ciraolo, L.; Gurtner, W.; Massmann, F.H.; del Rosso, D.; Scharroo, R.; et al. The Calibration of the ERS-1 Radar Altimeter-The Venice Calibration Campaign; ESA Report ER-RP-ESA-RA-0257 Issue 2.0; ESA/ESTEC: Noordwijk, The Netherlands, 1993. [Google Scholar]
- Mondéjar, A.G.; Fornari, M.; Bouffard, J.; Féménias, P.; Roca, M. CryoSat-2 range, datation and interferometer calibration with Svalbard transponder. Adv. Space Res. 2008, 62, 1589–1609. [Google Scholar] [CrossRef]
- Haines, B.; Desai, S.D.; Kubitschek, D.; Leben, R.R. A brief history of the harvest experiment: 1989-2019. Adv. Space Res. 2020, 68, 1161–1170. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guinle, T.; Féménias, P. Corsica: A 20-Yr multi-mission absolute altimeter calibration site. Adv. Space Res. 2020, 68, 1171–1186. [Google Scholar] [CrossRef]
- Watson, C.; White, N.; Church, J.; Burgette, R.; Tregoring, P.; Coleman, R. Absolute Calibration in Bass Strait, Australia: TOPEX, Jason-1 and OSTM/Jason-2. Mar. Geod. 2011, 34, 242–260. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Féménias, P.; Mavrocordatos, C.; Galanakis, D.; Tripolitsiotis, A.; Frantzis, X.; Tziavos, I.N.; Vergos, G.; Guinle, T. Fifteen Years of Cal/Val Service to Reference Altimetry Missions: Calibration of Satellite Altimetry at the Permanent Facilities in Gavdos and Crete, Greece. Remote Sens. 2018, 10, 1557. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, J.; Ma, C.; Lin, M.; Yan, L.; Huang, X.; Zhai, W.; Mu, B.; Jia, Y. Preliminary calibration results of the HY-2B altimeter’s SSH at China’s Wanshan calibration site. Acta Oceanol. Sin. 2021, 40, 129–140. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Zhou, X.; Zhu, L.; Jiang, Q.; Sun, H.; Chen, G.; Wang, P.; Mertikas, S.P.; Fu, Y.; et al. Calibration of an Airborne Interferometric Radar Altimeter over the Qingdao Coast Sea, China. Remote Sens. 2020, 12, 1651. [Google Scholar] [CrossRef]
- Morrow, R.; Fu, L.-L.; Ardhuin, F.; Benkiran, M.; Chapron, B.; Cosme, E.; d’Ovidio, F.; Farrar, J.T.; Gille, S.T.; Lapeyre, G.; et al. Global Observations of Fine-Scale Ocean Surface Topography with the Surface Water and Ocean Topography (SWOT) Mission. Front. Mar. Sci. 2019, 6, 232. [Google Scholar] [CrossRef]
- Chupin, C.; Ballu, V.; Testut, L.; Tranchant, Y.-T.; Aucan, J. Noumea: A new multi-mission Cal/Val site for past and future altimetry missions? EGUsphere 2022, 2022, 1–37. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreir, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Parkinson, C.L. Satellite Contributions to Climate Change Studies. Proc. Am. Philos. Soc. 2017, 161, 208–225. [Google Scholar]
- Mertikas, S.P.; Tripolitsiotis, A.; Donlon, C.; Mavrocordatos, C.; Féménias, P.; Borde, F.; Frantzis, X.; Kokolakis, C.; Guinle, T.; Vergos, G.; et al. The ESA Permanent Facility for Altimetry Calibration: Monitoring Performance of Radar Altimeters for Sentinel-3A, Sentinel-3B and Jason-3 using Transponder and Sea-Surface Calibrations with FRM Standards. Remote Sens. 2020, 12, 2642. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Vuilleumier, P.; Cullen, R.; Féménias, P.; Tripolitsiotis, A. An Action Plan towards Fiducial Reference Measurements for Satellite Altimetry. Remote Sens. 2019, 11, 1993. [Google Scholar] [CrossRef]
- Goryl, P.; Fox, N.; Donlon, C.; Castracane, P. Fiducial Reference Measurements (FRMs): What Are They? Remote Sens. 2023, 15, 5017. [Google Scholar] [CrossRef]
- Rodriguez, E.; Fernandez, D.E.; Peral, E.; Chen, C.W.; De Bleser, J.-W.; Williams, B. Wide Swath Altimetry: A Review. In Satellite Altimetry over Oceans and Lakes, 1st ed.; Stammer, D., Cazenave, A., Eds.; CRC Press: Boca Raton, FL, USA, 2017; pp. 71–113. [Google Scholar] [CrossRef]
- Verron, J.; Bonnefond, P.; Aouf, L.; Birol, F.; Bhowrnic, S.; Calmant, S.; Conchy, T.; Crétaux, J.-F.; Dibarboure, G.; Dubey, A.K.; et al. The benefits of the Ka-band as evidenced from the SARAL/Altika altimetric mission: Sci-entific Applications. Remote Sens. 2018, 10, 163. [Google Scholar] [CrossRef]
- Myasoedov, A.; Johannessen, J.A.; Kudryavtsev, V.; Collard, F.; Chapron, B. Sun glitter as a “tool” for monitoring Ocean from Space. In Proceedings of the 2nd International Conference on Remote Sensing, Enviornment and Transportation Engineering, Nanjing, China, 1–3 June 2012. [Google Scholar] [CrossRef]
- Roesler, C.; Larson, K.M. Software tools for GNSS interferometric reflectometry (GNSS-IR). GPS Solut. 2018, 22, 80. [Google Scholar] [CrossRef]
- Zheng, N.; Chai, H.; Ma, Y.; Chen, L.; Chen, P. Hourly sea level height forecast based on GNSS-IR using ARIMA model. Int. J. Remote Sens. 2022, 43, 3387–3411. [Google Scholar] [CrossRef]
- Chen, C.; Desai, S.; Picot, N.; Fu, L.-L.; Morrow, R.; Pavelsky, T.; Cretaux, J.-F. SWOT Calibration/Validation Plan. 2018. Available online: https://swot.jpl.nasa.gov/system/documents/files/2244_2244_D-75724_SWOT_Cal_Val_Plan_Initial_20180129u.pdf (accessed on 5 August 2022).
- Mertikas, S.P.; Partsinevelos, P.; Tripolitsiotis, A.; Kokolakis, C.; Petrakis, G.; Frantzis, X. Validation of Sentinel-3 OLCI In-tegrated Water Vapor Products using regional GNSS measurements in Crete, Greece. Remote Sens. 2020, 12, 2606. [Google Scholar] [CrossRef]
- Donlon, C.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Francis, R.C.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Giulicchi, I.; Tavernier, G.; Picot, N.; Cullen, R.; Scharroo, R.; Martin-Puig, C.; Desai, S.; Desjonquerres, J.D.; Leuliette, E.; Egido, A. Sentinel-6/Jason-CS Cal/Val Concept; JC-PL-ESA-MI-0500; European Space Research and Technology Centre: Noordwijk, The Netherlands, 2019; Available online: https://shorturl.at/jLWZ6 (accessed on 8 August 2023).
- Willis, P.; Mertikas, S.P.; Argus, D.F.; Bock, O. DORIS and GPS monitoring of the Gavdos calibration site in Crete. Adv. Space Res. 2013, 51, 1438–1447. [Google Scholar] [CrossRef]
- Herring, T.A.; King, R.W.; McClusky, S.C. GAMIT Reference Manual: GPS Analysis at MIT, Release 10.7; Massachusetts Institute of Technology: Cambridge, MA, USA, 2020. [Google Scholar]
- Collins, P.; Bisnath, S.; Lahaye, F.; Heroux, P. Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Mavrocordatos, C.; Piretzidis, D.; Kokolakis, C.; Cullen, R.; Matsakis, D.; Borde, F.; Fornari, M.; Boy, F.; et al. Performance evaluation of the CDN1 altimetry Cal/Val transponder to internal and external constituents of uncertainty. Adv. Space Res. 2022, 70, 2458–2479. [Google Scholar] [CrossRef]
- Miguez Martin, B.; Testut, L.; Woppelmann, G. Performance of modern tide gauges: Towards mm-level accuracy. Sci. Mar. 2012, 76, 221–228. [Google Scholar] [CrossRef]
- Gorbon, K.; de Viron, O.; Wöppelmann, G.; Poirier, É.; Ballu, V.; Van Camp, M. Assessment of tide gauge biases and precision by the combination of multiple collocated time series. J. Atmos. Ocean. Technol. 2019, 36, 1983–1996. [Google Scholar] [CrossRef]
- Miguez Martin, B.; Testut, L.; Woppelmann, G. The van de Casteele test revisited: An efficient approach to tide gauge error characterization. J. Atmos. Ocean. Technol. 2008, 25, 1238–1244. [Google Scholar] [CrossRef]
- Mertikas, S.P. Description of accuracy using conventional and robust estimates of scale. Mar. Geod. 1994, 17, 251–269. [Google Scholar] [CrossRef]
- Zingerle, P.; Pail, R.; Gruber, T.; Oikonomidou, X. The combined global gravity field model XGM2019e. J. Geod. 2020, 94, 66. [Google Scholar] [CrossRef]
- Förste, C.; Bruinsma, S.; Flechtner, F.; Abrykosov, O.; Dahle, C.; Marty, J.; Lemoine, J.; Biancale, R.; Barthelmes, F.; Neumayer, K.; et al. EIGEN-6C4 the latest combined global gravity field model including GOCE data up to degree and order 2190 of GFZ Potsdam and GRGS Toulouse. In GFZ Data Services; GFZ German Research Centre for Geosciences: Potsdam, Germany, 2014. [Google Scholar] [CrossRef]
- Gilardoni, M.; Reguzzoni, M.; Sampietro, D. GECO: A global gravity model by locally combining GOCE data and EGM2008. Stud. Geophys. Geod. 2016, 60, 228–247. [Google Scholar] [CrossRef]
- Thibaut, P.; Piras, F.; Roinard, H.; Guerou, A.; Boy, F.; Maraldi, C.; Bignalet-Cazalet, F.; Dibarboure, G.; Picot, N. Benefits of the adaptive retracking solution for the Jason-3 GDR-F reprocessing campaign. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021; pp. 7422–7425. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Donlon, C.; Féménias, P.; Cullen, R.; Galanakis, D.; Frantzis, X.; Tripolitsiotis, A. Fiducial Reference Measurements for Satellite Altimetry Calibration: The Constituents. In Fiducial Reference Measurements for Altimetry; Mertikas, S., Pail, R., Eds.; International Association of Geodesy Symposia; Springer: Cham, Switzerland, 2019; Volume 150, pp. 1–6. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Lin, M.; Piretzidis, D.; Kokolakis, C.; Donlon, C.; Ma, C.; Zhang, Y.; Jia, Y.; Mu, B.; Frantzis, X.; et al. Absolute Calibration of the Chinese HY-2B Altimetric Mission with Fiducial Reference Measurement Standards. Remote Sens. 2023, 15, 1393. [Google Scholar] [CrossRef]
- Andersen, O.B.; Zhang, S.; Sandwell, D.T.; Dibarboure, G.; Smith, W.H.F.; Abulatijiang, A. The Unique Role of the Jason Ge-odetic Missions for high Resolution Gravity Field and Mean Sea Surface Modelling. Remote Sens. 2021, 13, 646. [Google Scholar] [CrossRef]
- Cullen, R.; Donlon, C.; Fornari, M.; Giulicchi, L. Sentinel-6 Michael Freilich Poseidon-4 Altimeter In-Orbit Performance. In Proceedings of the GARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, IEEE, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 6791–6794. [Google Scholar] [CrossRef]
- Mertikas, S.P.; Daskalakis, A.; Tziavos, I.N.; Andersen, O.B.; Vergos, G.; Tripolitsiotis, A.; Zervakis, V.; Frantzis, X.; Partsinevelos, P. Altimetry, bathymetry and geoid variations at the Gavdos permanent Cal/Val facility. Adv. Space Res. 2013, 51, 1418–1437. [Google Scholar] [CrossRef]
- Kokolakis, C.; Piretzidis, D.; Mertikas, S.P. Impact of Satellite Attitude on Altimetry Calibration with Microwave Transponders. Remote Sens. 2022, 14, 6369. [Google Scholar] [CrossRef]
- Naeije, M.; Di Bella, A.; Geminale, T.; Visser, P. CryoSat Long-Term Ocean Data Analysis and Validation: Final Words on GOP Baseline-C. Remote Sens. 2023, 15, 5420. [Google Scholar] [CrossRef]
- Windham, D.J.; Francis, C.R.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.W.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Di Bella, A.; Kwok, R.; Armitage, T.W.K.; Skourup, H.; Forsberg, R. Multi-peak Retracking of CryoSat-2 SARIn Waveforms Over Arctic Sea Ice. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3776–3792. [Google Scholar] [CrossRef]
- Dettmering, D.; Schwatke, C. Multi-Mission Cross-Calibration of Satellite Altimeters. In Fiducial Reference Measurements for Altimetry; Mertikas, S.P., Pail., R., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 49–54. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Coordinates | Ellipsoid Height | Cal/Val Applied | Missions | Scientific Instrumentation |
|---|---|---|---|---|---|
| CDN1 | Lat: 35.337840N Lon: 23.779502E | 1050 m | Transponder, GNSS array | S6, S3A, S3B, CryoSat-2, Jason-3 |
|
| Gavdos (GVD1) | Lat: 34.8385030N Lon: 24.1086480E | 124 m | Transponder, GNSS array | S6, S3A, CryoSat-2, Jason-3 |
|
| Gavdos(GVD8) | Lat: 34.8479730N Lon: 24.1197700E | 22 m | Sea surface GNSS array | S6, S3A, CryoSat-2, Jason-3 |
|
| RDK1 | Lat: 35.1875970N Lon: 24.3184830E | 25 m | Sea surface GNSS array | S6, S3A, S3B, HY-2B, Jason-3 |
|
| CRS1 | Lat: 35.3031510N Lon: 24.5213510E | 21 m | Sea surface GNSS array | S3A, S3B, HY-2B |
|
| SUG1 | Lat: 35.2457950N Lon: 23.8049270E | 25 m | Sea surface GNSS array | S6, S3A, S3B, CryoSat-2, Jason-3 |
|
| Positioning | Χ (m) | Y (m) | Z (m) | Vx (m) | Vy (m) | Vz [m] |
|---|---|---|---|---|---|---|
| Relative | 4,783,636.1689 | 2,140,697.5989 | 3,623,254.8707 | 0.0038 | 0.0067 | −0.0055 |
| Precise Point | 4,783,636.1530 | 2,140,697.5746 | 3,623,254.8711 | 0.0051 | 0.0098 | −0.0056 |
| Sea-Surface Uncertainty Constituents | Transponder Uncertainty Constituents | ||||
|---|---|---|---|---|---|
| Description | CRS1 | RDK1 | Gavdos | Description | CDN1 |
| GNSS receiver | ±3.5 mm | ±3.5 mm | ±3.5 mm | GNSS receiver | ±3 mm |
| GNSS repeatability | ±0.1 mm | ±0.1 mm | ±0.1 mm | GNSS repeatability | ±0.1 mm |
| GNSS ARP | ±4.0 mm | ±4.0 mm | ±4.0 mm | GNSS ARP | ±2.0 mm |
| GNSS solution | ±0.1 mm | ±0.1 mm | ±0.1 mm | GNSS integration | ±2.0 mm |
| GNSS velocity | ±2.0 mm | ±4.5 mm | ±2.5 mm | Control ties | ±0.1 mm |
| GNSS integration | ±3.7 mm | ±3.7 mm | ±3.7 mm | Ionospheric delay | ±2.3 mm |
| Control ties | ±0.1 mm | ±0.1 mm | ±0.1 mm | Total tropospheric delay | ±6.9 mm |
| Reference surfaces | ±42.0 mm | ±47.0 mm | ±39.0 mm | Geophysical corrections | ±5.8 mm |
| Tide gauge sensor | ±4.0 mm | ±6.0 mm | ±4.0 mm | Measured range | ±1.7 mm |
| Repeatability | ±2.5 mm | ±2.5 mm | ±2.5 mm | TRP internal delay | ±15.0 mm |
| Zero-point reference | ±2.5 mm | ±2.5 mm | ±2.5 mm | Satellite orbit | ±11.5 mm |
| Final water level | ±7.5 mm | ±7.5 mm | ±7.5 mm | Center of mass | ±5.8 mm |
| Geoid slope | ±5.8 mm | ±5.8 mm | ±5.8 mm | Bin range | ±17.3 mm |
| Processing | ±0.3 mm | ±0.3 mm | ±0.3 mm | Orbit interpolation | ±0.3 mm |
| Unaccounted effects | ±11.5 mm | ±11.5 mm | ±11.5 mm | Unaccounted effects | ±11.5 mms |
| FRM Uncertainty Budget | ±45.4mm | ±50.4 mm | ±43.2 mm | ±30.2 mm | |
| Method/Data | Cal/Val Site | Descending D18 | Ascending A109 | Average | Cycles | Products |
|---|---|---|---|---|---|---|
| Transponder (Range Bias) | ||||||
| SAR (N = 91) | CDN1 (Crete) | −4 ± 2 mm | −4 mm | 4–96 | L1A, POE | |
| SAR (N = 62) | GVD1 (Gavdos) | +2 ± 1 mm | −6 ± 1.5 mm | −2 mm | 34–97 | L1A, POE |
| Pseudo-LRM (Range Bias) | ||||||
| Pseudo-LRM (N = 76) | CDN1 (Crete) | −11 ± 2 mm | - | −11 mm | 4–79 | NTC, POE |
| Pseudo-LRM (N = 42) | GVD1 (Gavdos) | +13 ± 1 mm | +6 ± 2 mm | +10 mm | 35–78 | NTC, POE |
| Sea-Surface (SSH Bias) | ||||||
| (N = 96) | Gavdos and SUG1 | −15 ± 5 mm - | −15 mm | 4–100 | NTC, HR, PB: F08 | |
| (N = 95) | Gavdos and RDK1 | −19 ± 5 mm | −19 mm | 4–99 | NTC, HR, PB: F08 |
| Reference Site | CRS1 | SUG1 | Gavdos (GVD8) | RDK1 |
|---|---|---|---|---|
| Satellite | Sentinel–3A | |||
| Pass | D278 | A14 | A14 and D335 | D335 |
| Direction | Descending | Ascending | Ascending and Descending | Descending |
| Cycles | 4–98 | 71–97 | 4–101 | 4–−101 |
| SSH bias | −14 ± 4 mm | +25 ± 7 mm | −12 ± 4 mm (A14) | −1 ± 5 mm |
| Satellite | Sentinel–3B | |||
| Pass | A14 | D335 | D335 | A71 |
| Direction | Ascending | Descending | Descending | Ascending |
| Cycles | 18–79 | 19–69 | 19–82 | 19–82 |
| SSH bias | −12 ± 4 mm | N/A | −12 ± 6 mm | +13 ± 6 mm |
| Method/Site | Pass D18 | Pass A109 | Cycles | Sample Size | Products |
|---|---|---|---|---|---|
| Transponder | |||||
| Crete (CDN1 Cal/Val) | +13 ± 1 mm | 5–226 | N = 220 | GDR-F | |
| Gavdos (GVD1 Cal/Val) | +3 ± 4 mm | +10 ± 5 mm | 209–226 | N = 17 | GDR-F |
| Sea Surface | |||||
| Gavdos | −5 ± 3 mm | −8 ± 3 mm | 5–226 | N = 220 | GDR-F |
| SUG1 (Crete) | −19 ± 10 mm | 190–226 | N = 36 | GDR-F | |
| RDK1 (Crete) | −18 ± 5 mm | 124–220 | N = 96 | GDR-F |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mertikas, S.P.; Donlon, C.; Kokolakis, C.; Piretzidis, D.; Cullen, R.; Féménias, P.; Fornari, M.; Frantzis, X.; Tripolitsiotis, A.; Bouffard, J.; et al. The ESA Permanent Facility for Altimetry Calibration in Crete: Advanced Services and the Latest Cal/Val Results. Remote Sens. 2024, 16, 223. https://doi.org/10.3390/rs16020223
Mertikas SP, Donlon C, Kokolakis C, Piretzidis D, Cullen R, Féménias P, Fornari M, Frantzis X, Tripolitsiotis A, Bouffard J, et al. The ESA Permanent Facility for Altimetry Calibration in Crete: Advanced Services and the Latest Cal/Val Results. Remote Sensing. 2024; 16(2):223. https://doi.org/10.3390/rs16020223
Chicago/Turabian StyleMertikas, Stelios P., Craig Donlon, Costas Kokolakis, Dimitrios Piretzidis, Robert Cullen, Pierre Féménias, Marco Fornari, Xenophon Frantzis, Achilles Tripolitsiotis, Jérôme Bouffard, and et al. 2024. "The ESA Permanent Facility for Altimetry Calibration in Crete: Advanced Services and the Latest Cal/Val Results" Remote Sensing 16, no. 2: 223. https://doi.org/10.3390/rs16020223
APA StyleMertikas, S. P., Donlon, C., Kokolakis, C., Piretzidis, D., Cullen, R., Féménias, P., Fornari, M., Frantzis, X., Tripolitsiotis, A., Bouffard, J., Di Bella, A., Boy, F., & Saunier, J. (2024). The ESA Permanent Facility for Altimetry Calibration in Crete: Advanced Services and the Latest Cal/Val Results. Remote Sensing, 16(2), 223. https://doi.org/10.3390/rs16020223