
Multidirectional Attention Fusion Network for SAR Change Detection


Abstract
1. Introduction
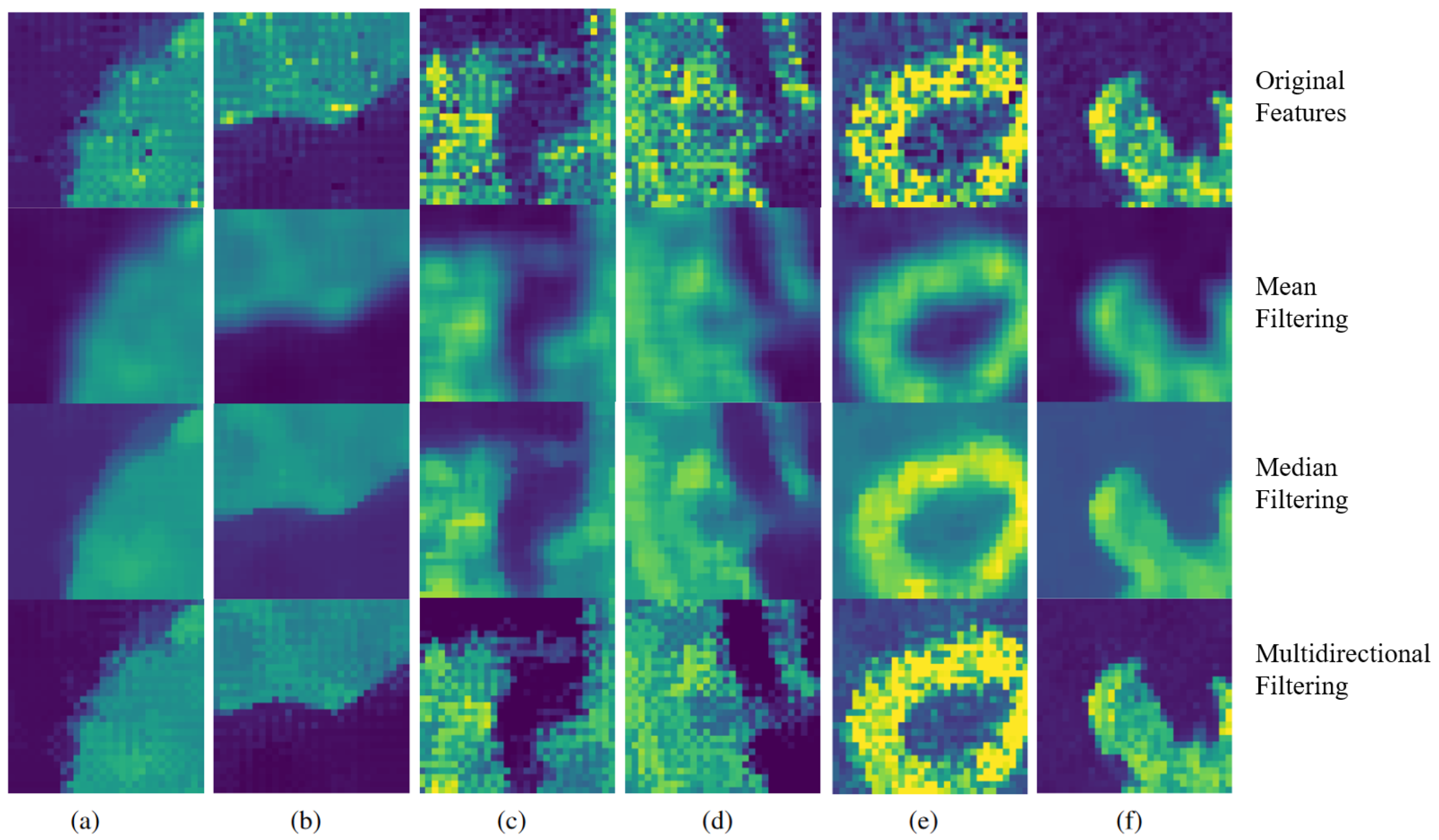
- We have developed the Multidirectional Filter (MF), a technique specifically designed for SAR imagery that effectively reduces noise and enhances feature clarity. This approach excels in speckle noise suppression while preserving essential edge details.
- The Multidirectional Adaptive Filter (MDAF) combines multidirectional learning with a multiscale self-attention mechanism, providing deep analysis of both local and global information in SAR images. This enhances the model’s understanding of complex spatial relationships.
- MDAF-Net integrates advanced noise reduction techniques with spatial context awareness to accurately identify real changes in SAR imagery, significantly reducing false positives.
2. Related Work
2.1. SAR Denoising
2.2. Change Detection in Remote Sensing
3. Proposed Method
- Difference Map Generation Module: uses a Siamese network [47] to extract features from dual-temporal images and generates the difference map.
- Feature Learning Module: enhances feature representation through multiscale self-attention mechanisms and multidirectional feature learning.
- Change Prediction Module: utilizes a multilayer perceptron (MLP) [48] to classify the extracted features and output the change detection results.
3.1. Differential Map Generation Module
3.2. Feature Extraction and Noise Reduction
3.3. MDAF Integration
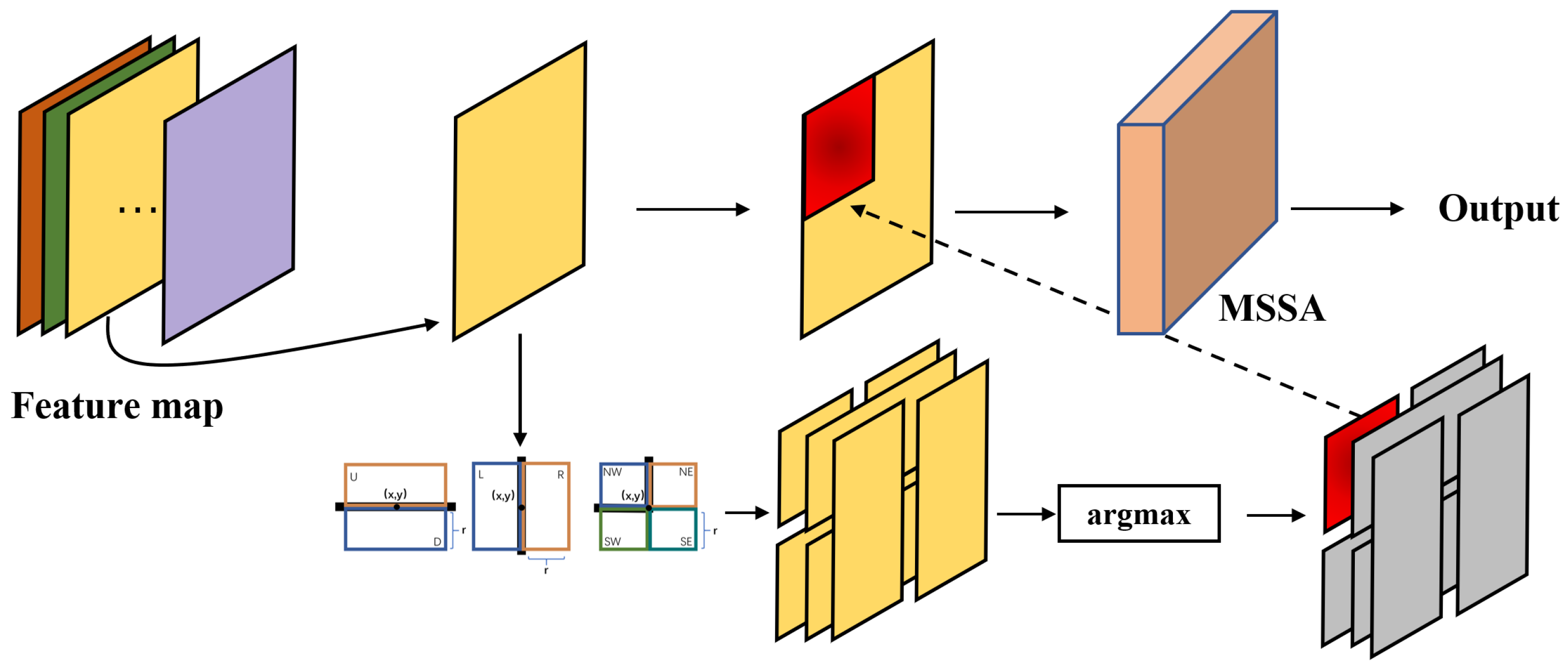
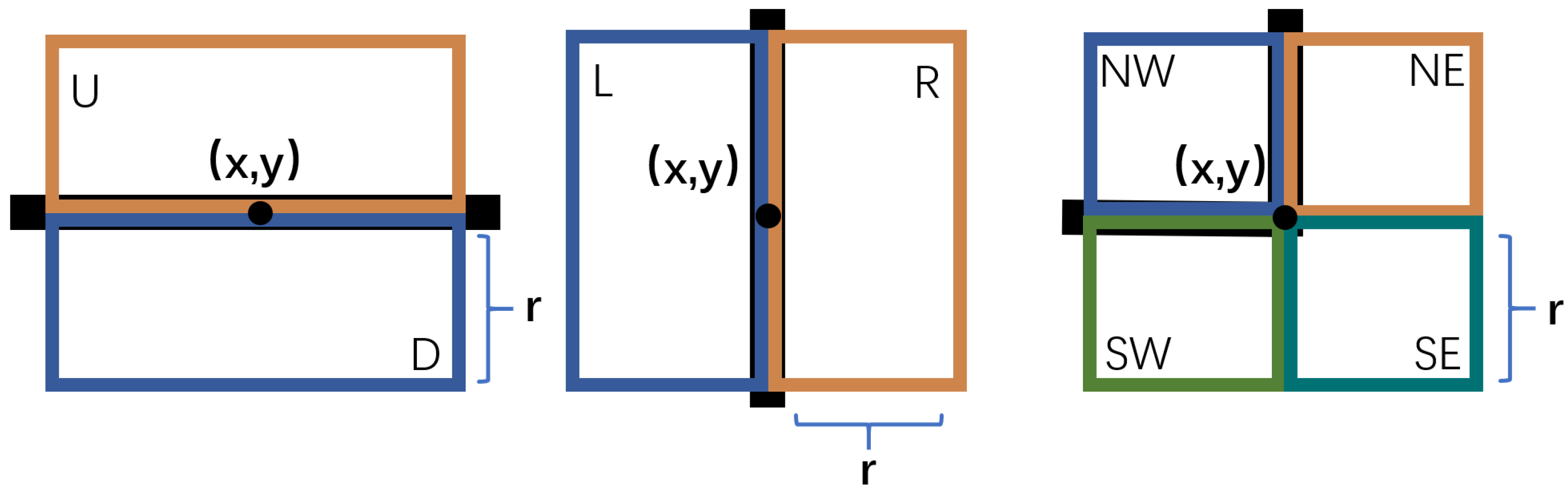
3.3.1. Multidirectional Fine-Grained Denoising
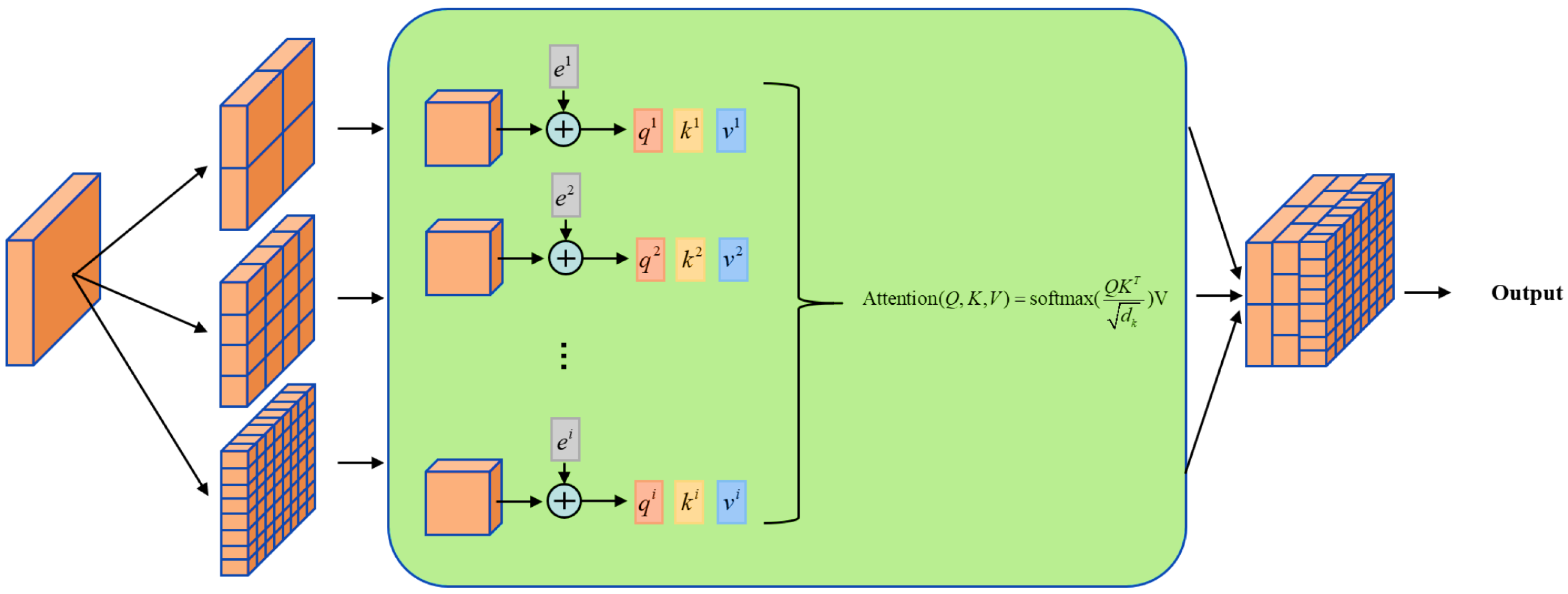
3.3.2. Global Context with Multidirectional Attention
4. Experimental Results and Analysis
4.1. Dataset and Evaluation Criteria
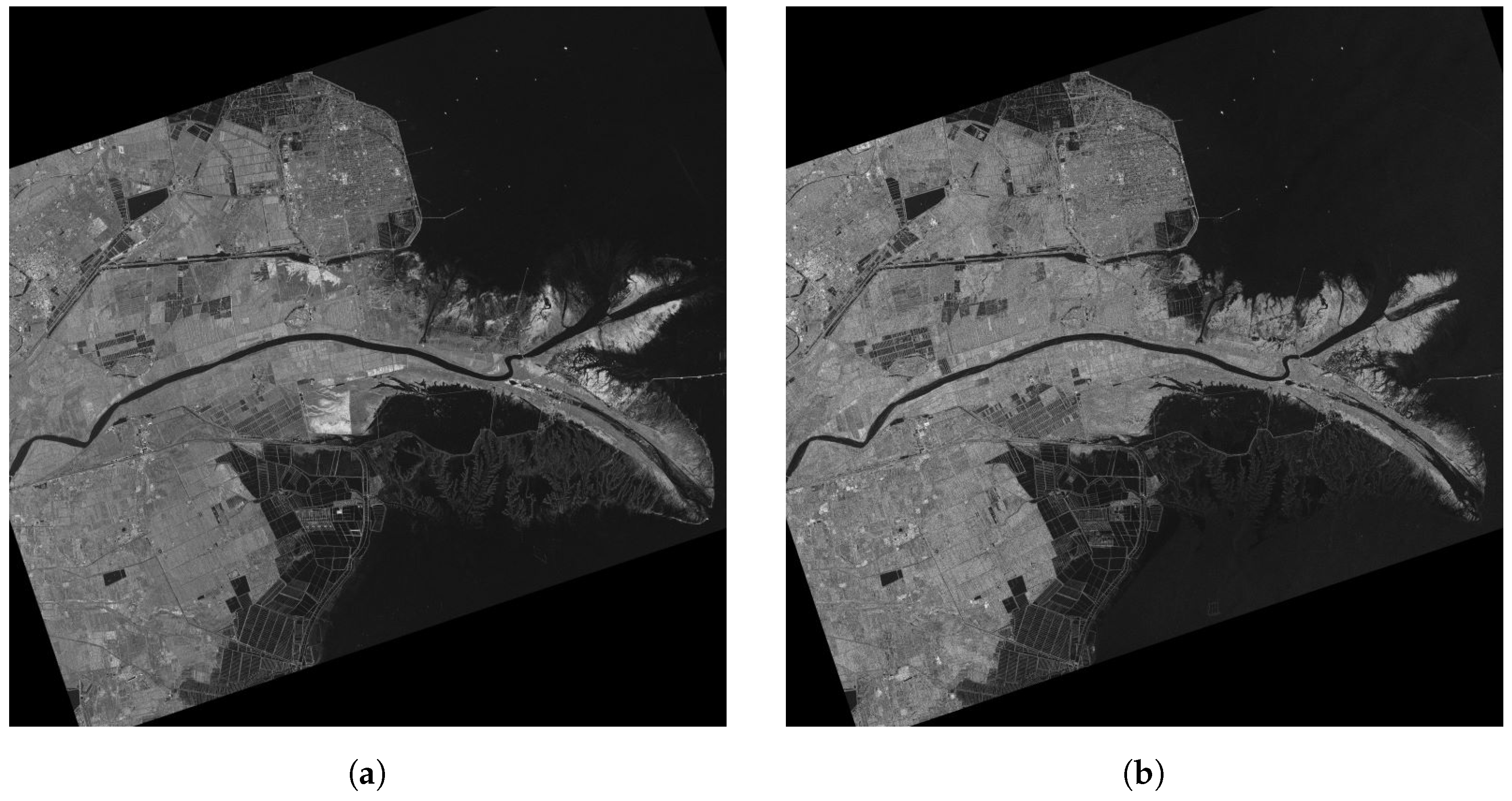
4.1.1. Yellow River Estuary Dataset
4.1.2. Ottawa Dataset
4.1.3. Red River Dataset
4.1.4. Jialu River Dataset
4.1.5. Evaluation Criteria for CD
- Overall Error (OE): the total number of incorrect detections, calculated as:
- Overall Classification Accuracy (PCC): the proportion of correctly classified samples, calculated as:
- Kappa Coefficient: a statistical measure that compares an observed accuracy with an expected accuracy (random chance), calculated as:whereand
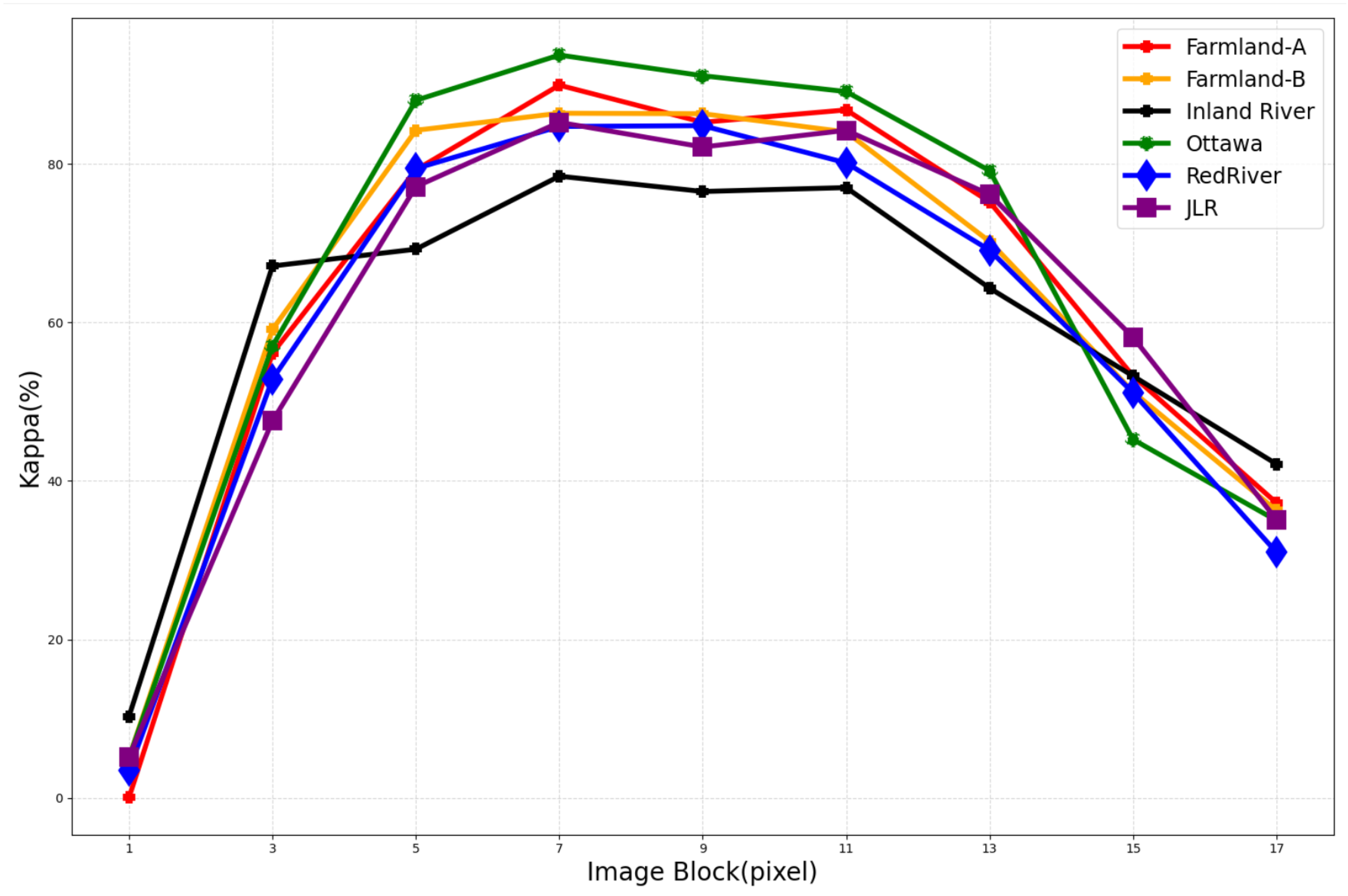
4.2. Parameters Analysis of the Proposed MDAF-Net
Key Parameter Analysis and Experimental Setup
4.3. Comparative Algorithm Explanation
- 1.
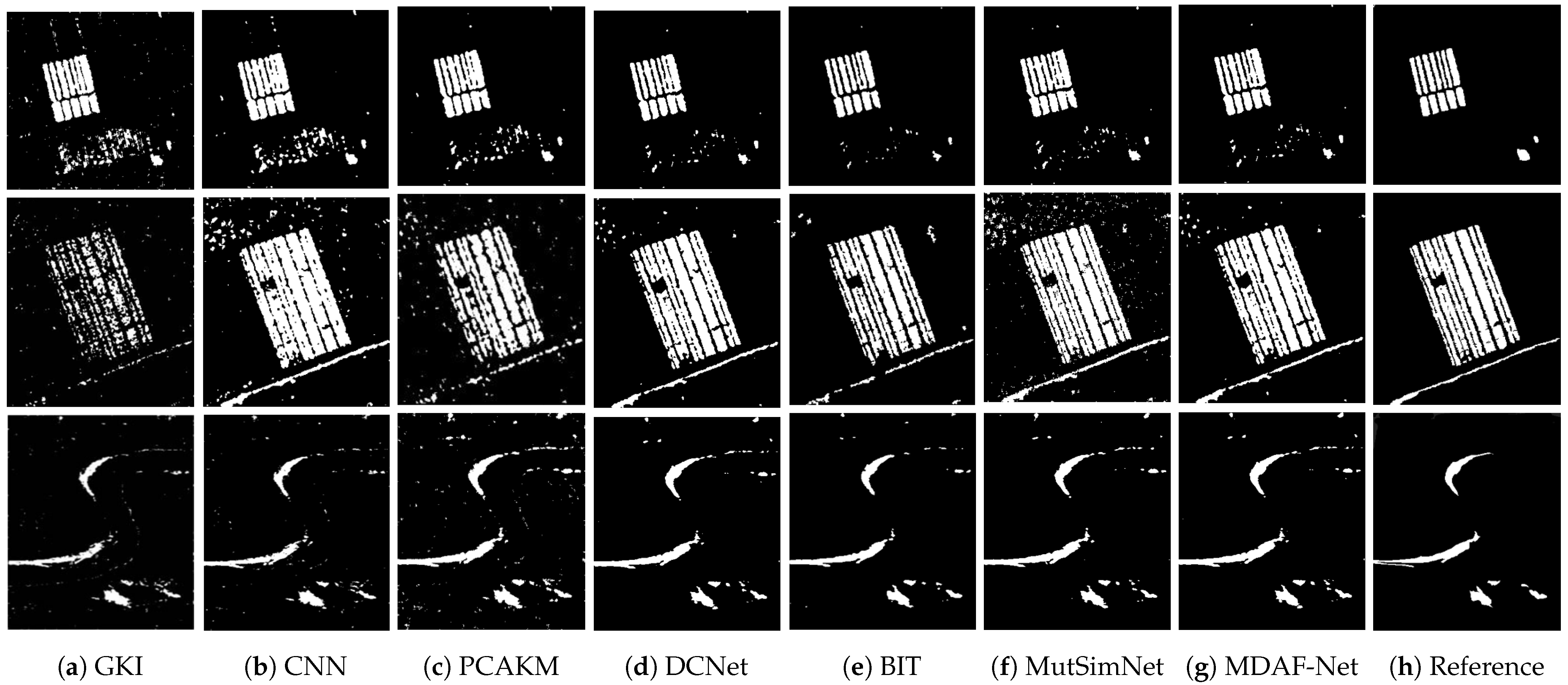
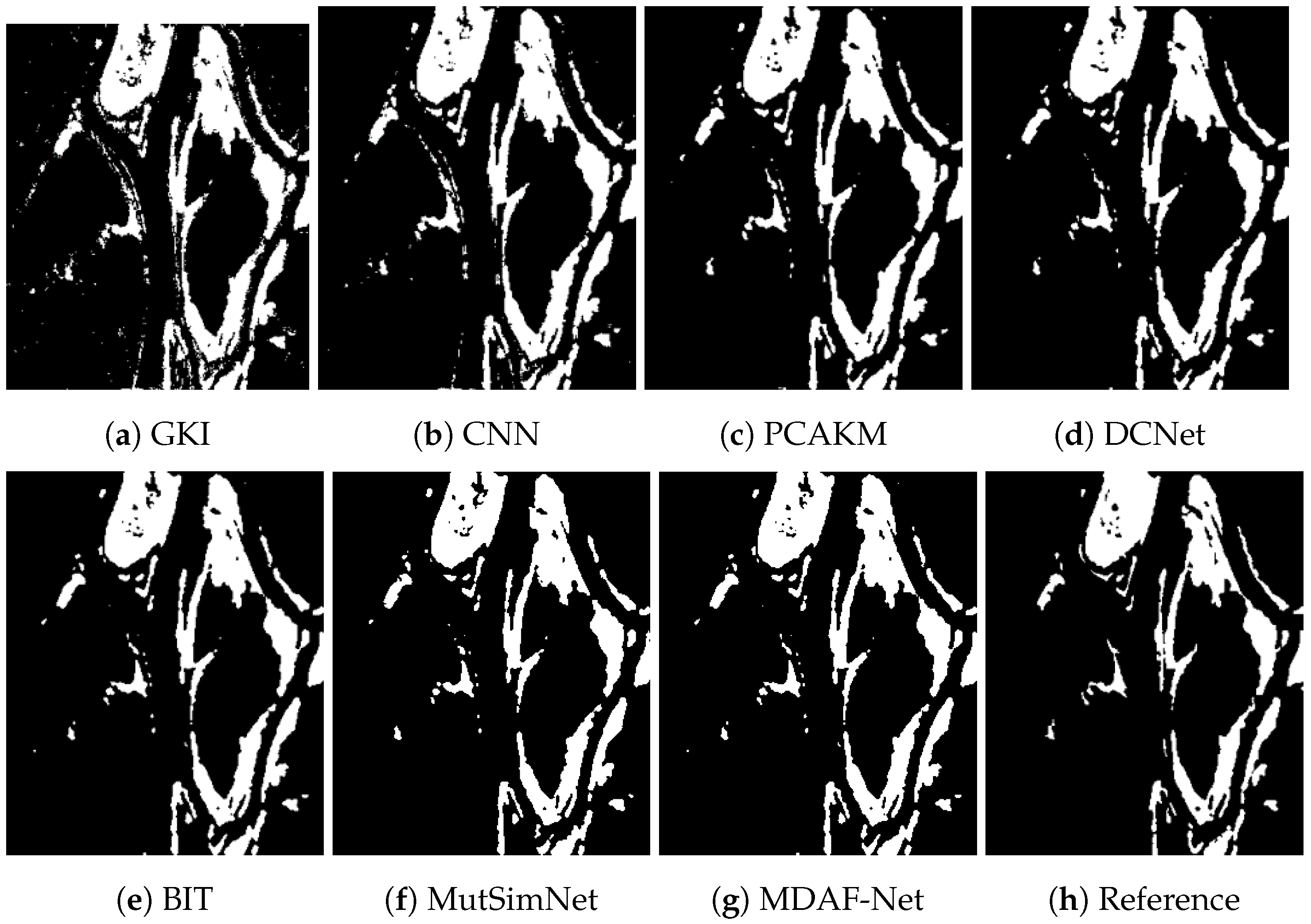
- GKI: uses a minimum-error thresholding for unsupervised change detection in SAR images, adapting to non-Gaussian data distributions.
- 2.
- CNN: applies convolutional layers to learn feature representations from the input images for detecting changes between multi-temporal images.
- 3.
- PCAKM: combines PCA to reduce dimensionality and K-Means clustering to group data into changed and unchanged categories based on significant features.
- 4.
- DCNet: detects changes in SAR images through a channel weighting-based deep learning network, enhancing sensitivity and accuracy.
- 5.
- BIT: implements a bi-temporal image transformer to efficiently and effectively model contexts within the spatial–temporal domain, utilizing a transformer encoder to model contexts in compact token-based space-time.
- 6.
- MutSimNet: introduces a mutually reinforcing similarity network that applies similarity learning and a self-attention mechanism within a feature pyramid network. This design aims to minimize false alarms and reduce misjudgment rates along changing boundaries by effectively integrating multilayer features and focusing on edge contour learning.
4.3.1. Results on the Yellow River Estuary Dataset
4.3.2. Results on the Ottawa Dataset
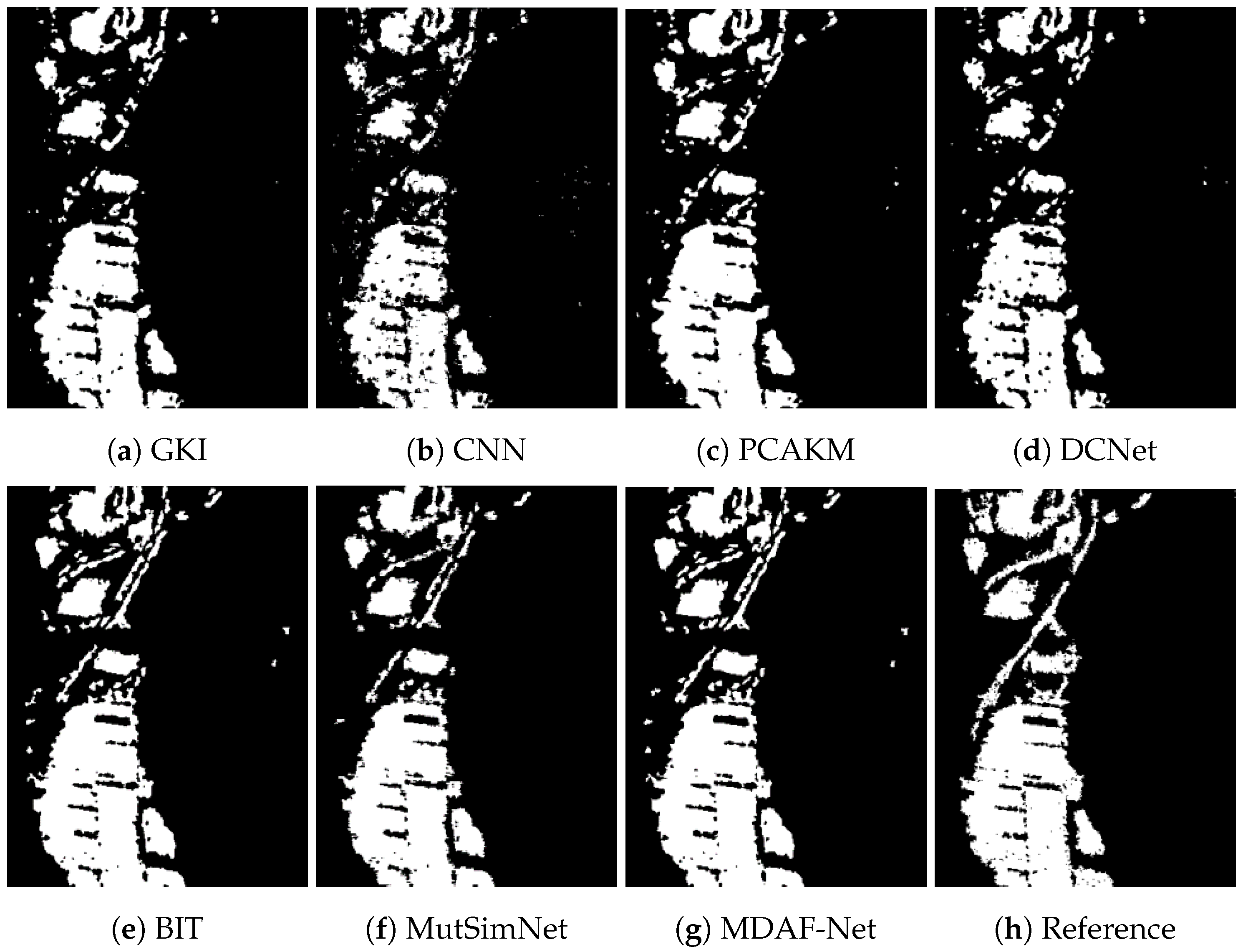
4.3.3. Results on the Red River Dataset
4.3.4. Results on the Jialu River Dataset
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pacifici, F.; Longbotham, N.; Emery, W.J. The Importance of Physical Quantities for the Analysis of Multitemporal and Multiangular Optical Very High Spatial Resolution Images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6241–6256. [Google Scholar] [CrossRef]
- Walter, V. Object-based classification of remote sensing data for change detection. ISPRS J. Photogramm. Remote Sens. 2004, 58, 225–238. [Google Scholar] [CrossRef]
- Stilla, U.; Xu, Y. Change detection of urban objects using 3D point clouds: A review. ISPRS J. Photogramm. Remote Sens. 2023, 197, 228–255. [Google Scholar] [CrossRef]
- Zhu, Q.; Guo, X.; Li, Z.; Li, D. A review of multi-class change detection for satellite remote sensing imagery. Geo-Spat. Inf. Sci. 2024, 27, 1–15. [Google Scholar] [CrossRef]
- Li, L.; Ma, L.; Jiao, L.; Liu, F.; Sun, Q.; Zhao, J. Complex contourlet-CNN for polarimetric SAR image classification. Pattern Recognit. 2020, 100, 107110. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. A SAR dataset of ship detection for deep learning under complex backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef]
- Shang, L.; Zhou, Y.; Su, P.G. Super-resolution restoration of MMW image based on sparse representation method. Neurocomputing 2014, 137, 79–88. [Google Scholar] [CrossRef]
- Saha, S.; Bovolo, F.; Bruzzone, L. Building change detection in VHR SAR images via unsupervised deep transcoding. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1917–1929. [Google Scholar] [CrossRef]
- Singh, P.; Diwakar, M.; Shankar, A.; Shree, R.; Kumar, M. A Review on SAR Image and its Despeckling. Arch. Comput. Methods Eng. 2021, 28, 4633–4653. [Google Scholar] [CrossRef]
- Han, Y.; Feng, X.C.; Baciu, G.; Wang, W.W. Nonconvex sparse regularizer based speckle noise removal. Pattern Recognit. 2013, 46, 989–1001. [Google Scholar] [CrossRef]
- Jie, L.; Zheng, B.; Chen, H.W.; Flynn, M.P. A cascaded noise-shaping SAR architecture for robust order extension. IEEE J. Solid-State Circuits 2020, 55, 3236–3247. [Google Scholar] [CrossRef]
- Upla, K.P.; Joshi, M.V.; Gajjar, P.P. An edge preserving multiresolution fusion: Use of contourlet transform and MRF prior. IEEE Trans. Geosci. Remote Sens. 2014, 53, 3210–3220. [Google Scholar] [CrossRef]
- Paris, S.; Kornprobst, P.; Tumblin, J.; Durand, F. Bilateral filtering: Theory and applications. Found. Trends Comput. Graph. Vis. 2009, 4, 1–73. [Google Scholar] [CrossRef]
- Mishiba, K. Fast guided median filter. IEEE Trans. Image Process. 2023, 32, 737–749. [Google Scholar] [CrossRef] [PubMed]
- Ochotorena, C.N.; Yamashita, Y. Anisotropic guided filtering. IEEE Trans. Image Process. 2019, 29, 1397–1412. [Google Scholar] [CrossRef]
- Tian, S.; Zhong, Y.; Zheng, Z.; Ma, A.; Tan, X.; Zhang, L. Large-scale deep learning based binary and semantic change detection in ultra high resolution remote sensing imagery: From benchmark datasets to urban application. ISPRS J. Photogramm. Remote Sens. 2022, 193, 164–186. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L. Artificial intelligence for remote sensing data analysis: A review of challenges and opportunities. IEEE Geosci. Remote Sens. Mag. 2022, 10, 270–294. [Google Scholar] [CrossRef]
- Guo, P.; Du, G.; Wei, L.; Lu, H.; Chen, S.; Gao, C.; Chen, Y.; Li, J.; Luo, D. Multiscale face recognition in cluttered backgrounds based on visual attention. Neurocomputing 2022, 469, 65–80. [Google Scholar] [CrossRef]
- Chua, L.O. CNN: A vision of complexity. Int. J. Bifurc. Chaos 1997, 7, 2219–2425. [Google Scholar] [CrossRef]
- Huang, X.; Lu, Q.; Zhang, L. A multi-index learning approach for classification of high-resolution remotely sensed images over urban areas. ISPRS J. Photogramm. Remote Sens. 2014, 90, 36–48. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Gu, S.; Zhang, L. Learning deep CNN denoiser prior for image restoration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3929–3938. [Google Scholar]
- Chierchia, G.; Cozzolino, D.; Poggi, G.; Verdoliva, L. SAR image despeckling through convolutional neural networks. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5438–5441. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Thakur, R.K.; Maji, S.K. Agsdnet: Attention and gradient-based sar denoising network. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4506805. [Google Scholar] [CrossRef]
- Reich, S.; Wörgötter, F.; Dellen, B. A Real-Time Edge-Preserving Denoising Filter. In Proceedings of the VISIGRAPP (4: VISAPP), Madeira, Portugal, 27–29 January 2018; pp. 85–94. [Google Scholar]
- Yin, H.; Gong, Y.; Qiu, G. Side window filtering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8758–8766. [Google Scholar]
- Liu, S.; Lei, Y.; Zhang, L.; Li, B.; Hu, W.; Zhang, Y.D. MRDDANet: A Multiscale Residual Dense Dual Attention Network for SAR Image Denoising. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Dong, H.; Jiao, L.; Ma, W.; Liu, F.; Liu, X.; Li, L.; Yang, S. Deep shearlet network for change detection in sar images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5241115. [Google Scholar] [CrossRef]
- Priya, P.; Firdaus, M.; Ekbal, A. Computational politeness in natural language processing: A survey. ACM Comput. Surv. 2024, 56, 1–42. [Google Scholar] [CrossRef]
- Raza, S.; Garg, M.; Reji, D.J.; Bashir, S.R.; Ding, C. Nbias: A natural language processing framework for BIAS identification in text. Expert Syst. Appl. 2024, 237, 121542. [Google Scholar] [CrossRef]
- Guo, R.; Ying, X.; Qi, Y.; Qu, L. UniTR: A Unified TRansformer-based Framework for Co-object and Multi-modal Saliency Detection. IEEE Trans. Multimed. 2024, 26, 7622–7635. [Google Scholar] [CrossRef]
- Huo, Y.; Cheng, X.; Lin, S.; Zhang, M.; Wang, H. Memory-augmented Autoencoder with Adaptive Reconstruction and Sample Attribution Mining for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5518118. [Google Scholar] [CrossRef]
- Shafique, A.; Cao, G.; Khan, Z.; Asad, M.; Aslam, M. Deep learning-based change detection in remote sensing images: A review. Remote Sens. 2022, 14, 871. [Google Scholar] [CrossRef]
- Gong, M.; Zhao, J.; Liu, J.; Miao, Q.; Jiao, L. Change detection in synthetic aperture radar images based on deep neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 125–138. [Google Scholar] [CrossRef]
- Zhan, Y.; Fu, K.; Yan, M.; Sun, X.; Wang, H.; Qiu, X. Change detection based on deep siamese convolutional network for optical aerial images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1845–1849. [Google Scholar] [CrossRef]
- Chen, H.; Shi, Z. A spatial-temporal attention-based method and a new dataset for remote sensing image change detection. Remote Sens. 2020, 12, 1662. [Google Scholar] [CrossRef]
- Mei, L.; Ye, Z.; Xu, C.; Wang, H.; Wang, Y.; Lei, C.; Yang, W.; Li, Y. SCD-SAM: Adapting Segment Anything Model for Semantic Change Detection in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5626713. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, L.; Zhang, L. MSDformer: Multi-scale Deformable Transformer for Hyperspectral Image Super-Resolution. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5525614. [Google Scholar]
- Pinasthika, K.; Laksono, B.S.P.; Irsal, R.B.P.; Yudistira, N. SparseSwin: Swin Transformer with Sparse Transformer Block. Neurocomputing 2024, 580, 127433. [Google Scholar] [CrossRef]
- Chen, H.; Qi, Z.; Shi, Z. Remote sensing image change detection with transformers. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5607514. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Cheng, S.; Li, Y. SwinSUNet: Pure transformer network for remote sensing image change detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5224713. [Google Scholar] [CrossRef]
- Noman, M.; Fiaz, M.; Cholakkal, H.; Narayan, S.; Muhammad Anwer, R.; Khan, S.; Shahbaz Khan, F. Remote Sensing Change Detection with Transformers Trained from Scratch. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4704214. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, H.; Zhou, C.; Chen, K.; Liu, C.; Zou, Z.; Shi, Z. BiFA: Remote Sensing Image Change Detection with Bitemporal Feature Alignment. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5614317. [Google Scholar] [CrossRef]
- Yuan, F.; Zhang, Z.; Fang, Z. An effective CNN and Transformer complementary network for medical image segmentation. Pattern Recognit. 2023, 136, 109228. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Z.; Feng, R. A CNN-and Transformer-Based Dual-Branch Network for Change Detection with Cross-Layer Feature Fusion and Edge Constraints. Remote Sens. 2024, 16, 2573. [Google Scholar] [CrossRef]
- Pantze, A.; Santoro, M.; Fransson, J.E. Change detection of boreal forest using bi-temporal ALOS PALSAR backscatter data. Remote Sens. Environ. 2014, 155, 120–128. [Google Scholar] [CrossRef]
- He, A.; Luo, C.; Tian, X.; Zeng, W. A twofold siamese network for real-time object tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4834–4843. [Google Scholar]
- Tolstikhin, I.O.; Houlsby, N.; Kolesnikov, A.; Beyer, L.; Zhai, X.; Unterthiner, T.; Yung, J.; Steiner, A.; Keysers, D.; Uszkoreit, J.; et al. Mlp-mixer: An all-mlp architecture for vision. Adv. Neural Inf. Process. Syst. 2021, 34, 24261–24272. [Google Scholar]
- Bruzzone, L.; Prieto, D.F. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef]
- Gribbon, K.T.; Bailey, D.G. A novel approach to real-time bilinear interpolation. In Proceedings of the DELTA 2004. Second IEEE International Workshop on Electronic Design, Test and Applications, Perth, WA, Australia, 28–30 January 2004; pp. 126–131. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Tian, Y.; Fan, B.; Wu, F. L2-net: Deep learning of discriminative patch descriptor in euclidean space. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 661–669. [Google Scholar]
- Immerkær, J. Use of blur-space for deblurring and edge-preserving noise smoothing. IEEE Trans. Image Process. 2001, 10, 837–840. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, D.; Nie, F.; Yan, S.; Zhuang, Y. Image clustering using local discriminant models and global integration. IEEE Trans. Image Process. 2010, 19, 2761–2773. [Google Scholar] [CrossRef]
- Shen, T.; Zhou, T.; Long, G.; Jiang, J.; Wang, S.; Zhang, C. Reinforced self-attention network: A hybrid of hard and soft attention for sequence modeling. arXiv 2018, arXiv:1801.10296. [Google Scholar]
- Moser, G.; Serpico, S.B. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2972–2982. [Google Scholar] [CrossRef]
- Gong, M.; Yang, H.; Zhang, P. Feature learning and change feature classification based on deep learning for ternary change detection in SAR images. ISPRS J. Photogramm. Remote Sens. 2017, 129, 212–225. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Gao, Y.; Gao, F.; Dong, J.; Wang, S. Change detection from synthetic aperture radar images based on channel weighting-based deep cascade network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4517–4529. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Jiao, L.; Li, L.; Liu, F.; Yang, S.; Hou, B. MutSimNet: Mutually Reinforcing Similarity Learning for RS Image Change Detection. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4403613. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Location | Size (Pixels) | Temporal Coverage | Resolution | Sensor | Change Events |
|---|---|---|---|---|---|---|
| Yellow River | Yellow River Estuary, China | Farmland-A: 291 × 306 Farmland-B: 257 × 289 Inland River: 291 × 444 | Figure 6a: Jun 2008 Figure 6b: Jun 2009 | 8 m | Canadian Radarsat | Changes in land use and river flow at the Yellow River estuary. |
| Ottawa | Ottawa, Canada | 290 × 350 | Figure 6a: May 1997 Figure 6b: August 1997 | 8 m | Canadian Radarsat | Flooding |
| Red River | Red River, Vietnam | 512 × 512 | Figure 6a: 24 August 1996 Figure 6b: 14 August 1999 | – | ERS-2, ESA | Flooding |
| Jialu River (JLR) | Jialu River, Zhengzhou, China | 300 × 400 | Figure 6a: 15 July 2021 Figure 6b: 28 July 2021 | – | Chinese GF-3 | Flooding |
| Methods | Results on the Farmland-A Dataset | ||||
|---|---|---|---|---|---|
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 153 | 2047 | 2200 | 97.52 | 73.11 |
| CNN | 824 | 1317 | 2141 | 98.34 | 75.36 |
| PCAKM | 1291 | 489 | 1780 | 97.99 | 83.21 |
| DCNet | 493 | 658 | 1151 | 98.71 | 88.33 |
| BIT | 2692 | 622 | 3314 | 95.54 | 85.79 |
| MutSimNet | 1270 | 1089 | 2359 | 96.82 | 89.34 |
| MDAF-Net | 433 | 556 | 989 | 98.89 | 89.92 |
| Methods | Results on the Farmland-B dataset | ||||
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 311 | 7902 | 8213 | 88.94 | 52.14 |
| CNN | 3989 | 577 | 4566 | 93.85 | 81.12 |
| PCAKM | 1829 | 2806 | 4635 | 93.76 | 78.32 |
| DCNet | 790 | 2137 | 2974 | 96.00 | 86.16 |
| BIT | 1507 | 889 | 2396 | 98.15 | 75.76 |
| MutSimNet | 1441 | 796 | 2237 | 98.27 | 77.42 |
| MDAF-Net | 1744 | 1081 | 2825 | 96.19 | 86.38 |
| Methods | Results on the Inland River dataset | ||||
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 2069 | 1794 | 3863 | 97.01 | 72.55 |
| CNN | 1642 | 1394 | 3036 | 97.65 | 74.62 |
| PCAKM | 2934 | 817 | 3751 | 97.10 | 66.72 |
| DCNet | 1460 | 929 | 2389 | 98.15 | 75.63 |
| BIT | 1507 | 889 | 2396 | 98.15 | 75.76 |
| MutSimNet | 1441 | 796 | 2237 | 98.27 | 77.42 |
| MDAF-Net | 956 | 1036 | 1992 | 98.46 | 78.44 |
| Methods | Result on the Ottawa Dataset | ||||
|---|---|---|---|---|---|
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 4783 | 626 | 5409 | 94.6 | 81.81 |
| CNN | 3657 | 449 | 4106 | 95.9 | 85.90 |
| PCAKM | 955 | 1515 | 2470 | 97.57 | 90.73 |
| DCNet | 679 | 1051 | 1730 | 98.3 | 93.54 |
| BIT | 3349 | 406 | 3755 | 96.30 | 87.07 |
| MutSimNet | 1639 | 1095 | 2734 | 97.31 | 90.02 |
| MDAF-Net | 978 | 706 | 1684 | 98.34 | 93.72 |
| Methods | Result on the Red River Dataset | ||||
|---|---|---|---|---|---|
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 11,609 | 1962 | 13,571 | 94.80 | 79.10 |
| CNN | 15,676 | 865 | 16,541 | 93.60 | 75.90 |
| PCAKM | 9049 | 2090 | 11,239 | 95.70 | 82.10 |
| DCNet | 12,704 | 718 | 13,422 | 94.88 | 79.81 |
| BIT | 9694 | 1450 | 11,144 | 95.75 | 82.55 |
| MutSimNet | 9789 | 1870 | 11,659 | 95.55 | 81.67 |
| MDAF-Net | 7227 | 2068 | 9395 | 96.41 | 84.72 |
| Methods | Result on the JLR Dataset | ||||
|---|---|---|---|---|---|
| FP | FN | OE | PCC (%) | Kappa (%) | |
| GKI | 1658 | 6045 | 7703 | 93.58 | 79.81 |
| CNN | 1638 | 7433 | 9071 | 92.44 | 75.72 |
| PCAKM | 2081 | 4803 | 6884 | 94.18 | 82.17 |
| DCNet | 1569 | 6881 | 8450 | 92.96 | 77.55 |
| BIT | 1609 | 6906 | 8515 | 95.32 | 82.35 |
| MutSimNet | 1870 | 5789 | 7659 | 95.55 | 81.67 |
| MDAF-Net | 3731 | 2234 | 5965 | 95.02 | 85.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Liu, Q.; Cao, G.; Jiao, L.; Liu, F.; Liu, X.; Chen, P. Multidirectional Attention Fusion Network for SAR Change Detection. Remote Sens. 2024, 16, 3590. https://doi.org/10.3390/rs16193590
Li L, Liu Q, Cao G, Jiao L, Liu F, Liu X, Chen P. Multidirectional Attention Fusion Network for SAR Change Detection. Remote Sensing. 2024; 16(19):3590. https://doi.org/10.3390/rs16193590
Chicago/Turabian StyleLi, Lingling, Qiong Liu, Guojin Cao, Licheng Jiao, Fang Liu, Xu Liu, and Puhua Chen. 2024. "Multidirectional Attention Fusion Network for SAR Change Detection" Remote Sensing 16, no. 19: 3590. https://doi.org/10.3390/rs16193590
APA StyleLi, L., Liu, Q., Cao, G., Jiao, L., Liu, F., Liu, X., & Chen, P. (2024). Multidirectional Attention Fusion Network for SAR Change Detection. Remote Sensing, 16(19), 3590. https://doi.org/10.3390/rs16193590