
Damage Scene Change Detection Based on Infrared Polarization Imaging and Fast-PCANet


Abstract
1. Introduction
2. The Theoretical Algorithm
3. The Scene Change Detection Algorithm Based on Fast-PCANet
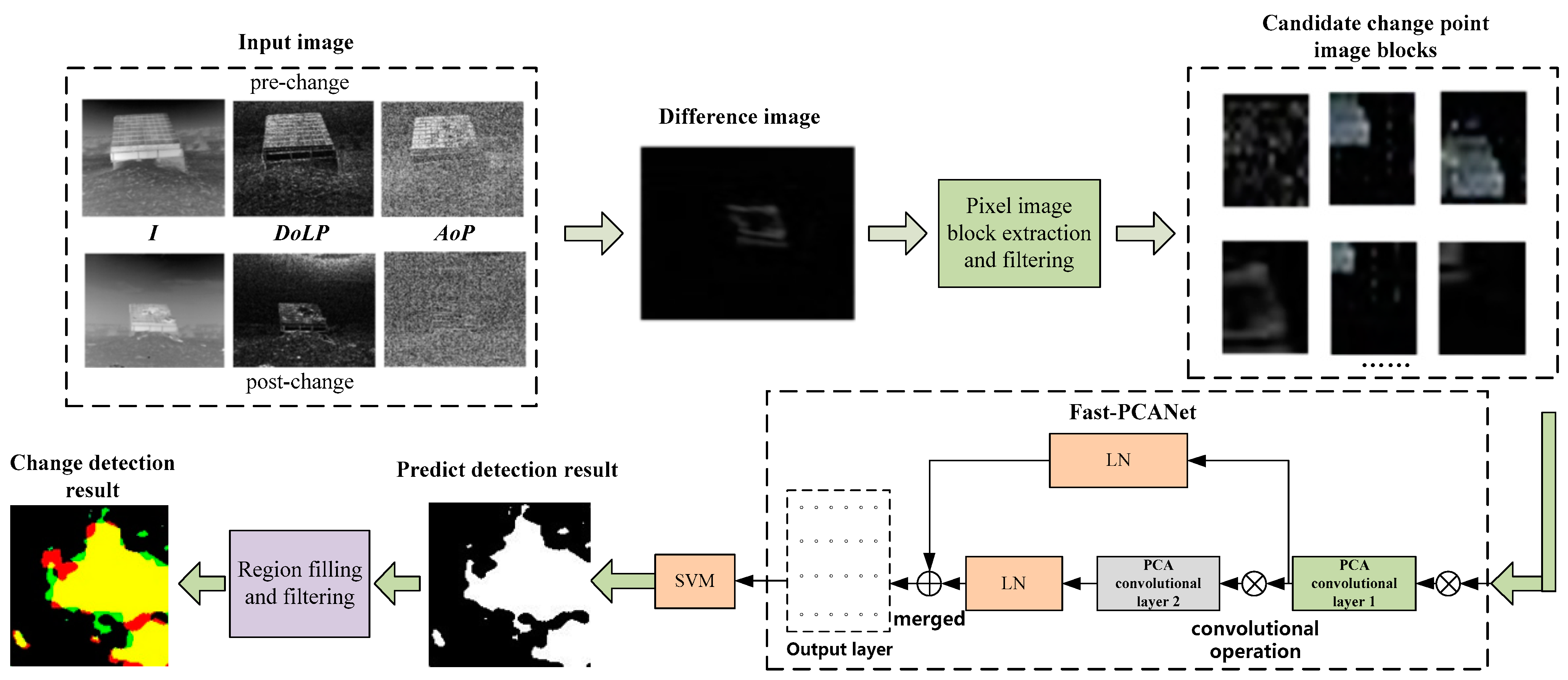
3.1. Pixel Image Block Extraction and Filtering Module
- The difference image before and after the scene change is obtained by differentiating the pre-change image and post-change image. Concretely, the difference image is a summarization of three difference images, i.e., the absolute difference between the pre-change intensity image I and the post-change intensity image I, the absolute difference between the pre-change image DoLP and the post-change image DoLP, and the absolute difference between the pre-change image AoP and the post-change image AoP.
- The neighborhood of each pixel point in the difference image is constructed as a block of k1 × k1 size.
- Coarse screening removes most of the invariant points from the difference image. The difference grayscale image is binarized using an estimated change threshold. It is calculated as follows:where (x, y) are the pixel point coordinates and is the change threshold.
- 4.
- Points with a value of 1 are considered candidate change points, and the corresponding image block is taken as the output of this module.
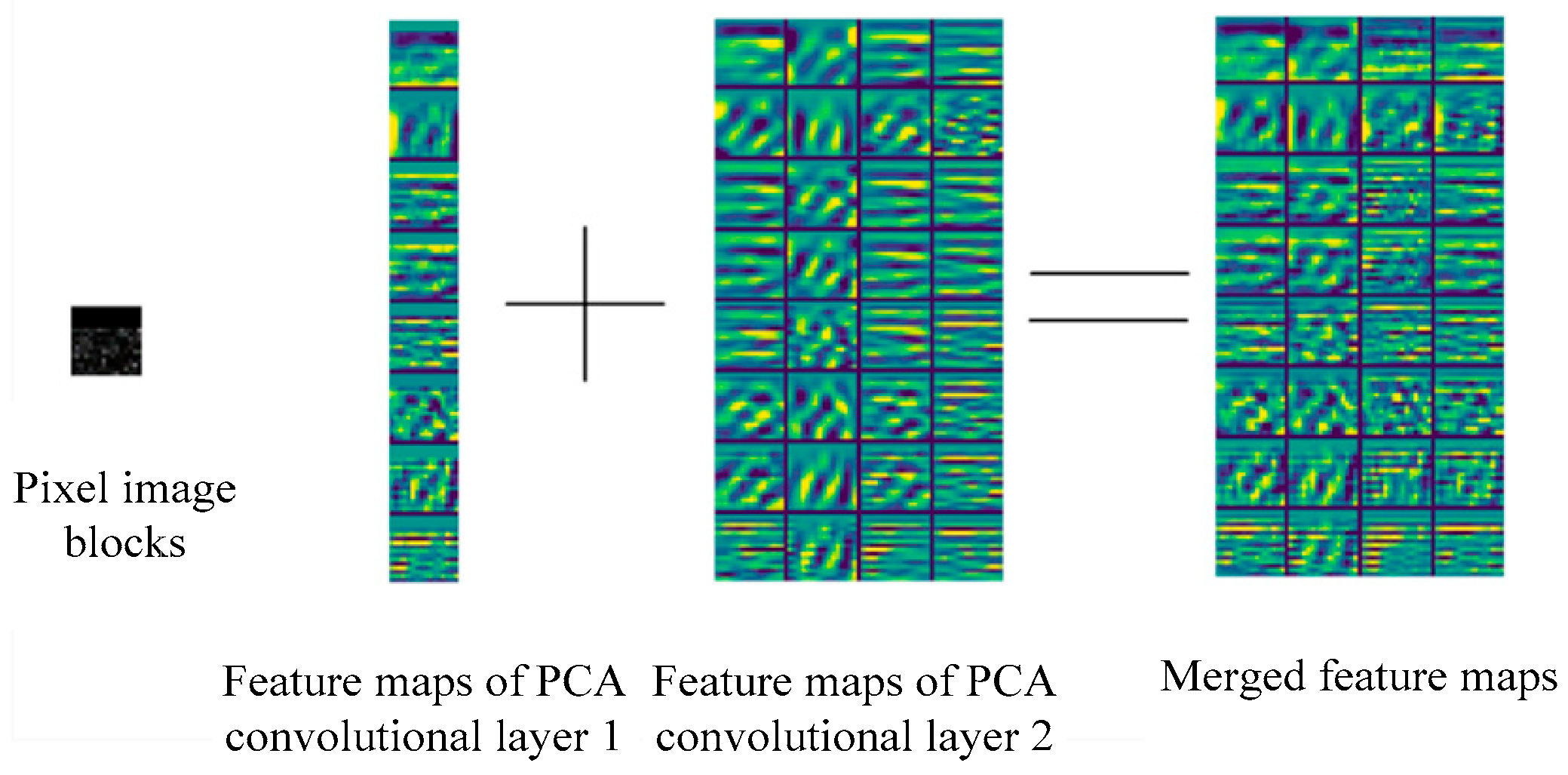
3.2. Fast-PCANet Module
3.3. Region Filling and Filtering Module
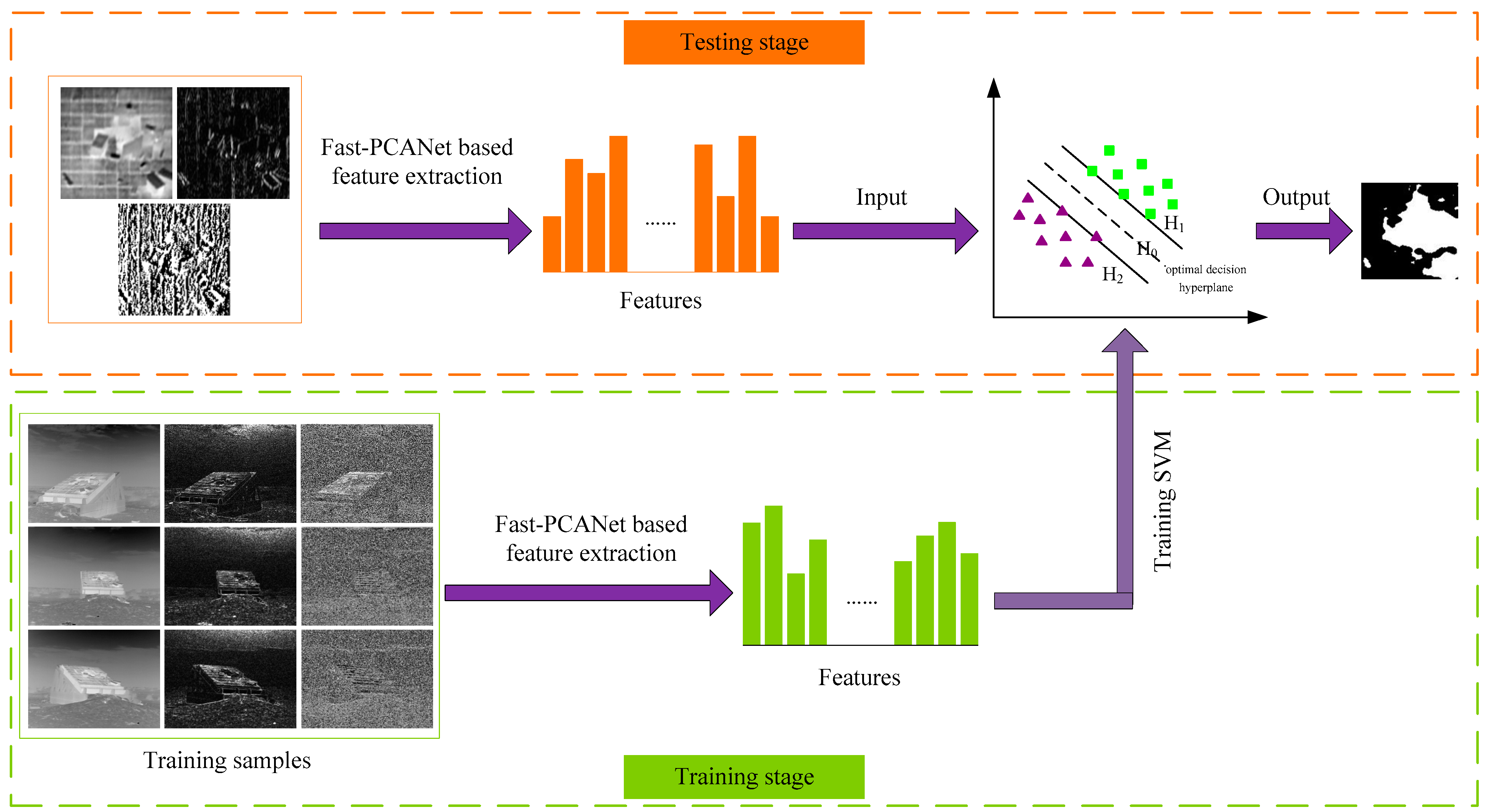
3.4. Algorithmic Implementation
- It is necessary to extract the image block of each pixel point of the differential image, both before and after the change.
- The differential image pixel points are to be divided into change points and unchanged points based on the labeling map. Each of these is then to be sorted according to the numerical size, from largest to smallest.
- It is assumed that the error rate associated with manual labeling is 5%. Consequently, the number of erroneous points to be removed is 5% of the total number of change points. The change points are eliminated in descending order of magnitude to obtain the change point set , while the invariant points are eliminated in ascending order of magnitude to obtain the invariant point set .
- The image blocks corresponding to all points in the change point set should be designated as positive samples for model training.
- The sorted pixel points in the invariant point set are sampled using the second-order equivariant series, thereby enabling the capture of invariant points within each value region. The general formula for the second-order isotropic series is as follows:where is the number of invariant points to be sampled, is the pixel index of the nth sampling point, and assuming , then the isometry d is
- Following step 5, the image block corresponding to the sampling point is generated as a negative sample for model training, and the positive and negative samples are produced.
4. Experiment and Analysis
4.1. Datasets
4.2. Evaluation Index
4.3. Architecture
4.4. Results
4.4.1. Overall Performance
4.4.2. Case Studies
4.4.3. Speed Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, C. Research on the Application of Optical Image Processing Methods in Battlefield Exercise Damage Assessment. Master’s Thesis, Xi’an Technological University, Xi’an, China, 2023. [Google Scholar]
- Tyo, J.; Goldstein, D.; Chenault, D.; Shaw, J. Review of passive imaging polarimetry for remote sensing applications. Appl. Opt. 2006, 45, 5453–5469. [Google Scholar] [CrossRef] [PubMed]
- Felton, M.; Gurton, K.; Pezzaniti, J.; Chenault, D.; Roth, L. Comparison of the inversion periods for MidIR and LWIR polarimetric and conventional thermal imagery. Proc. SPIE 2010, 7672, 76720R. [Google Scholar]
- Gong, L.; Yu, J.; Yang, Z.; Li, Y.; Yang, L.; Yu, Y.; Wu, Z.; Wang, L. Infrared polarization model optimization and radiation characteristics of camouflage coatings. Infrared Phys. Technol. 2024, 137, 105086. [Google Scholar] [CrossRef]
- Sawyer, M.A.; Hyde, M.W. Material characterization using passive multispectral polarimetric imagery. Proc. SPIE 2013, 8873, 88730Y. [Google Scholar]
- Qie, L.; Li, Z.; Sun, X.; Sun, B.; Li, D.; Liu, Z.; Huang, W.; Wang, H.; Chen, X.; Hou, W.; et al. Improving remote sensing of aerosol optical depth over land by polarimetric measurements at 1640 nm: Airborne test in north China. Remote Sens. 2015, 7, 6240–6252. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, L.; Zhang, D.; Pan, Q. Object separation by polarimetric and spectral imagery fusion. Comput. Vis. Image Underst. 2009, 113, 855–866. [Google Scholar] [CrossRef]
- Qong, M. Polarization state conformation and its application to change detection in polarimetric SAR data. IEEE Geosci. Remote Sens. Lett. 2004, 1, 304–308. [Google Scholar] [CrossRef]
- Chen, H.; Qi, Z.; Shi, Z. Remote sensing image change detection with transformers. IEEE Trans. Geosci. Remote 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Bai, T.; Wang, L.; Yin, D.; Sun, K.; Chen, Y.; Li, W.; Li, D. Deep learning for change detection in remote sensing: A review. Geo-Spat. Inf. Sci. 2023, 26, 262–288. [Google Scholar] [CrossRef]
- Afaq, Y.; Manocha, A. Analysis on change detection techniques for remote sensing applications: A review. Ecol. Inform. 2021, 63, 101310. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J. Change detection techniques for remote sensing applications: A survey. Earth Sci. Inform. 2019, 12, 143–160. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A theoretical framework for unsupervised change detection based on change vector analysis in the polar domain. IEEE Trans. Geosci. Remote 2006, 45, 218–236. [Google Scholar] [CrossRef]
- Nielsen, A. The regularized iteratively reweighted MAD method for change detection in multi- and hyperspectral data. IEEE Trans. Image Process 2007, 16, 463–478. [Google Scholar] [CrossRef]
- Wu, C.; Du, B.; Zhang, L. Slow feature analysis for change detection in multispectral imagery. IEEE Trans. Geosci. Remote 2014, 52, 2858–2874. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Ma, T.; Wang, H.; Liang, J.; Peng, J.; Ma, Q.; Kai, Z. MSMA-Net: An infrared small target detection network by multi-scale super-resolution enhancement and multi-level attention fusion. IEEE Trans. Geosci. Remote 2024, 62, 5602620. [Google Scholar]
- Ma, T.; Ma, Q.; Yang, Z.; Liang, J.; Fu, J.; Dou, Y.; Ku, Y. Usman Ahmad, Liangqiong Qu, MCDNet: An infrared small target detection network using multi-criteria decision and adaptive labeling strategy. IEEE Trans. Geosci. Remote 2024, 62, 5613414. [Google Scholar]
- Saha, S.; Bovolo, F.; Bruzzone, L. Unsupervised deep change vector analysis for multiple-change detection in VHR images. IEEE Trans. Geosci. Remote 2019, 57, 3677–3693. [Google Scholar] [CrossRef]
- Zhang, H.; Gong, M.; Zhang, P.; Su, L.; Shi, J. Feature-level change detection using deep representation and feature change analysis for multispectral imagery. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1666–1670. [Google Scholar] [CrossRef]
- Lin, Y.; Li, S.; Fang, L.; Ghamisi, P. Multispectral change detection with bilinear convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1757–1761. [Google Scholar] [CrossRef]
- Camalan, S.; Cui, K.; Pauca, V.P.; Alqahtani, S.; Silman, M.; Chan, R.; Plemmons, R.J.; Dethier, E.N.; Fernandez, L.E.; Lutz, D.A. Change detection of Amazonian alluvial gold mining using deep learning and Sentinel-2 imagery. Remote Sens. 2022, 14, 1746. [Google Scholar] [CrossRef]
- Gao, F.; Dong, J.; Li, B.; Xu, Q. Automatic change detection in synthetic aperture radar images based on PCANet. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1792–1796. [Google Scholar] [CrossRef]
- Chan, T.; Jia, K.; Gao, S.; Lu, J.; Zeng, Z.; Ma, Y. PCANet: A simple deep learning baseline for image classification. IEEE Trans. Image Process 2015, 24, 5017–5032. [Google Scholar] [CrossRef] [PubMed]
- Stokes, G. On the comparison and resolution of streams of polarized light from different sources. Trans. Camb. Philos. Soc. 1852, 9, 399–416. [Google Scholar]
- Xu, J.; Sun, X.; Zhang, Z.; Zhao, G.; Lin, J. Understanding and improving layer normalization. Adv. Neural Inf. Process. Syst. 2019, 32, 2–19. [Google Scholar]
- Hearst, M.; Dumais, S.; Osuna, E.; Platt, J.; Scholkopf, B. Support vector machines. IEEE Intell. Syst. 1998, 13, 18–28. [Google Scholar] [CrossRef]
- Yang, M.; Mao, H.; Xu, W.; Feng, B.; Zhai, W. DoFP polarimetric imagery in infrared detection blindness rejection. Proc. SPIE 2022, 12166, 121667W-1-10. [Google Scholar]
- Tao, L.; Jing, X.; Sun, S.; Huang, H.; Chen, N.; Lu, Y. Combining SURF with MSER for image matching. In Proceedings of the 2013 IEEE International Conference on Granular Computing (GrC), Beijing, China, 13–15 December 2013; pp. 286–290. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Feature Type | Evaluation Indexes | |
|---|---|---|---|
| PCC | Kappa | ||
| PCANet | Infrared intensity | 0.8412 | 0.6665 |
| Intensity + polarization | 0.8632 | 0.7105 | |
| Fast-PCANet | Infrared intensity | 0.8868 | 0.7579 |
| Intensity + polarization | 0.9089 | 0.8032 | |
| Method | Feature Type | Case 1 | Case 2 | Case 3 | |||
|---|---|---|---|---|---|---|---|
| PCC | Kappa | PCC | Kappa | PCC | Kappa | ||
| PCANet | Infrared intensity | 0.8688 | 0.7297 | 0.8026 | 0.5937 | 0.8354 | 0.6468 |
| Intensity + polarization | 0.8975 | 0.7876 | 0.8358 | 0.6558 | 0.8861 | 0.7531 | |
| Fast-PCANet | Infrared intensity | 0.8755 | 0.74380 | 0.8800 | 0.7454 | 0.8400 | 0.6581 |
| Intensity + polarization | 0.9159 | 0.8274 | 0.9027 | 0.7910 | 0.8924 | 0.7683 | |
| Method | Feature Type | Time Cost (s) |
|---|---|---|
| PCANet | Infrared intensity | 10.5515 |
| Intensity + polarization | 10.4929 | |
| Fast-PCANet | Infrared intensity | 1.4460 |
| Intensity + polarization | 1.4550 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Yang, J.; Mao, H.; Zheng, C. Damage Scene Change Detection Based on Infrared Polarization Imaging and Fast-PCANet. Remote Sens. 2024, 16, 3559. https://doi.org/10.3390/rs16193559
Yang M, Yang J, Mao H, Zheng C. Damage Scene Change Detection Based on Infrared Polarization Imaging and Fast-PCANet. Remote Sensing. 2024; 16(19):3559. https://doi.org/10.3390/rs16193559
Chicago/Turabian StyleYang, Min, Jie Yang, Hongxia Mao, and Chong Zheng. 2024. "Damage Scene Change Detection Based on Infrared Polarization Imaging and Fast-PCANet" Remote Sensing 16, no. 19: 3559. https://doi.org/10.3390/rs16193559
APA StyleYang, M., Yang, J., Mao, H., & Zheng, C. (2024). Damage Scene Change Detection Based on Infrared Polarization Imaging and Fast-PCANet. Remote Sensing, 16(19), 3559. https://doi.org/10.3390/rs16193559