1. Introduction, Background, and Study Area
Open-pit uranium mining in the south Texas Gulf Coast region was active during the second half of the 20th century. Although some mines have extensive records documenting the locations and extents with descriptions of reclamation procedures and timelines, abandoned and reclaimed mines with minimal documentation concurrently exist where little is known about locations, reclamation status, and mine waste volumes. The purpose of this study is to demonstrate that advanced mapping of the mining life cycle is helpful for producing basic mine land inventories and assessments of mine waste, including identifying potential undeveloped resources and environmental health issues, as well as in helping to inform proper management, restoration, and reclamation strategies.
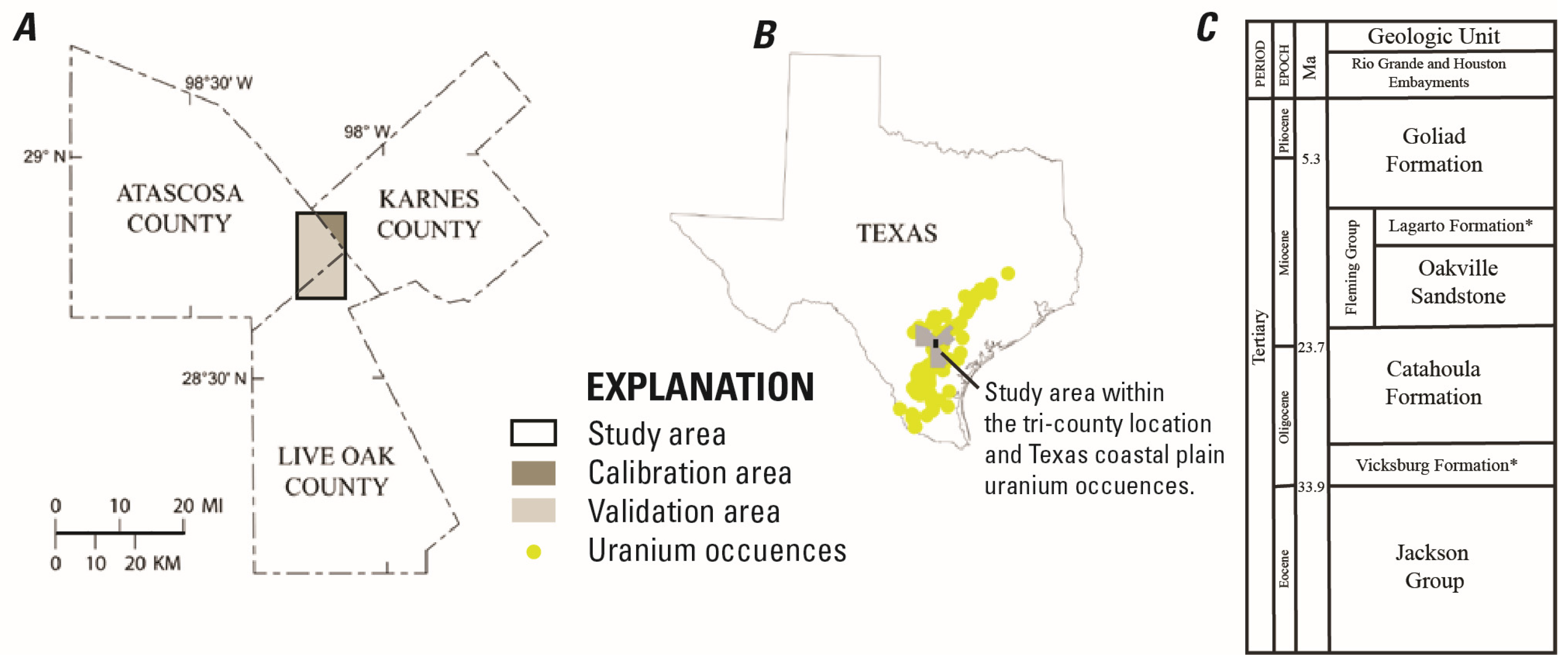
Oil companies discovered uranium in 1954 in the Texas Coastal Plain near Tordilla Hill (a site within Karnes County—
Figure 1) [
1], and mining began in 1959 [
2]. The Texas coastal region is one of three primary uranium mining regions in the United States [
3]. Open-pit uranium mining began with shallow surface outcrop deposits, and deeper subcrop deposits were developed in the mid-1960s [
1]. Uranium mining activity peaked during the energy crises of the 1970s and declined beginning in 1979 after a drop in economic demand [
2]. The region produced an estimated 80 million tons of uranium, composing 8% of the total national production [
1]. The Texas Surface Mining and Reclamation Act, which went into effect in 1975, and the Federal Surface Mining Control and Reclamation Act of 1977, respectively, established state and national uranium mine reclamation standards, as well as the Abandoned Mine Land Reclamation Fund. The Railroad Commission of Texas (RRC) has and continues to reclaim these mine sites, transforming the land use into agricultural row crop and pasture lands, alongside other types of land uses for energy development (e.g., oil and gas), such as in the region for petroleum production from the Eagle Ford Shale.
Although extensive records documenting the location and extent of mine pits and waste-rock piles, along with descriptions of reclamation activities are available for some mines, other mines were abandoned with little to no such documentation. The Department of Energy’s U.S. Producing Uranium Mines database does not always track production to specific mines; therefore, the number and precise location of mine features are not always known [
1]. The occurrence of undocumented mines is a global issue; basic knowledge of mine inventories and surveys is useful for studying environmental health risks and impacts [
4] and evaluating the resource potential of mining and mine waste. According to the RRC, 23 known uranium mine pits were abandoned within Karnes, Atascosa, and Live Oak Counties prior to 1975 [
2], though previous studies document a higher number [
1,
5]. Uranium production left a legacy of open-pit mining features, such as pit craters and waste-rock piles, which are still evident in modern-day digital topographic and remote sensing data [
5].
The study area is located in the south Texas Coastal Plain region and is 11.5 km wide by 19.5 km long, at the intersection of Karnes, Atascosa, and Live Oak Counties (
Figure 1). Much of the exposed and mined bedrock in the study area consists of sedimentary rocks from the Eocene Jackson Group, which is geologically the oldest Gulf Coastal Plain sedimentary unit from which uranium has been mined [
3]. It consists predominantly of quartzo-feldspathic sandstone, mudstone, claystone, and lignite members, the origins of which are coastal strandplain/barrier bar sand bodies, as well as lagoonal mud and swamp deposits, minor landward fluvial channel sand bodies, and gulfward shelf-related mud deposits [
6,
7]. The overlying Oligocene to Miocene Catahoula Formation is believed to be the main source of much of the uranium mined in the area in that the formation has been heavily leached of uranium by oxidizing and alkaline groundwaters. The uranium was then deposited as uranium “roll fronts” along reducing zones surrounded by impermeable barriers. Some of these uranium “roll front” ore zones are contained within the Catahoula Formation itself, as well as the underlying Jackson Group and overlying Oakville Sandstone of the Fleming Group and Goliad Formation (
Figure 2) [
1,
3,
8,
9].
Approximately 55% of our study area is covered by shrub/scrub vegetation types according to the U.S. Geological Survey (USGS) National Landcover Dataset [
10], while 32% is covered by hay and pastureland, and around 7% is covered by cultivated crops. One-quarter of the artificially planted and/or fallow vegetation types is considered pastureland, while hay, oats, corn, and cotton are the most common crop types according to the Texas Cropland Data Layer [
11]. Native shrubland vegetation and related canopy are dominated by honey mesquite (
Prosopis glandulosa), with an understory of mixed bermudagrass (
Cynodon dactylon), huisache (
Vachellia farnesiana), granjeno (
Celtis pallida), blackrush (
Vachellia rigidula), buffelgrass (
Cenchrus ciliaris), and lotebush (
Ziziphus obtusifolia).
This paper documents a spatiotemporal mapping system developed to identify mine features and associated areas of disturbance and classify them into the following four categories: (1) abandoned mine pits (dry and water-containing), (2) abandoned waste-rock piles, (3) reclaimed mine pits (dry and water-containing), and (4) reclaimed waste-rock piles. The mapping system utilizes multiple lines of evidence from Lidar and multispectral temporal Landsat satellite analysis. Published mine site survey information, as well as descriptive mining and reclamation activity details, provided by the Texas Railroad Commission and subsequent publications [
1,
2,
12] are used as a source of ground-truth information and as a means of method validation. Secondly, we estimate mine feature volume from Lidar-derived bare earth elevation. For mines where historical elevation data are available, we derive mine volumes by comparing geomorphic change before and after mining. The two mine volume estimation approaches are compared to examine the potential sources of uncertainty.
2. Datasets and Methods
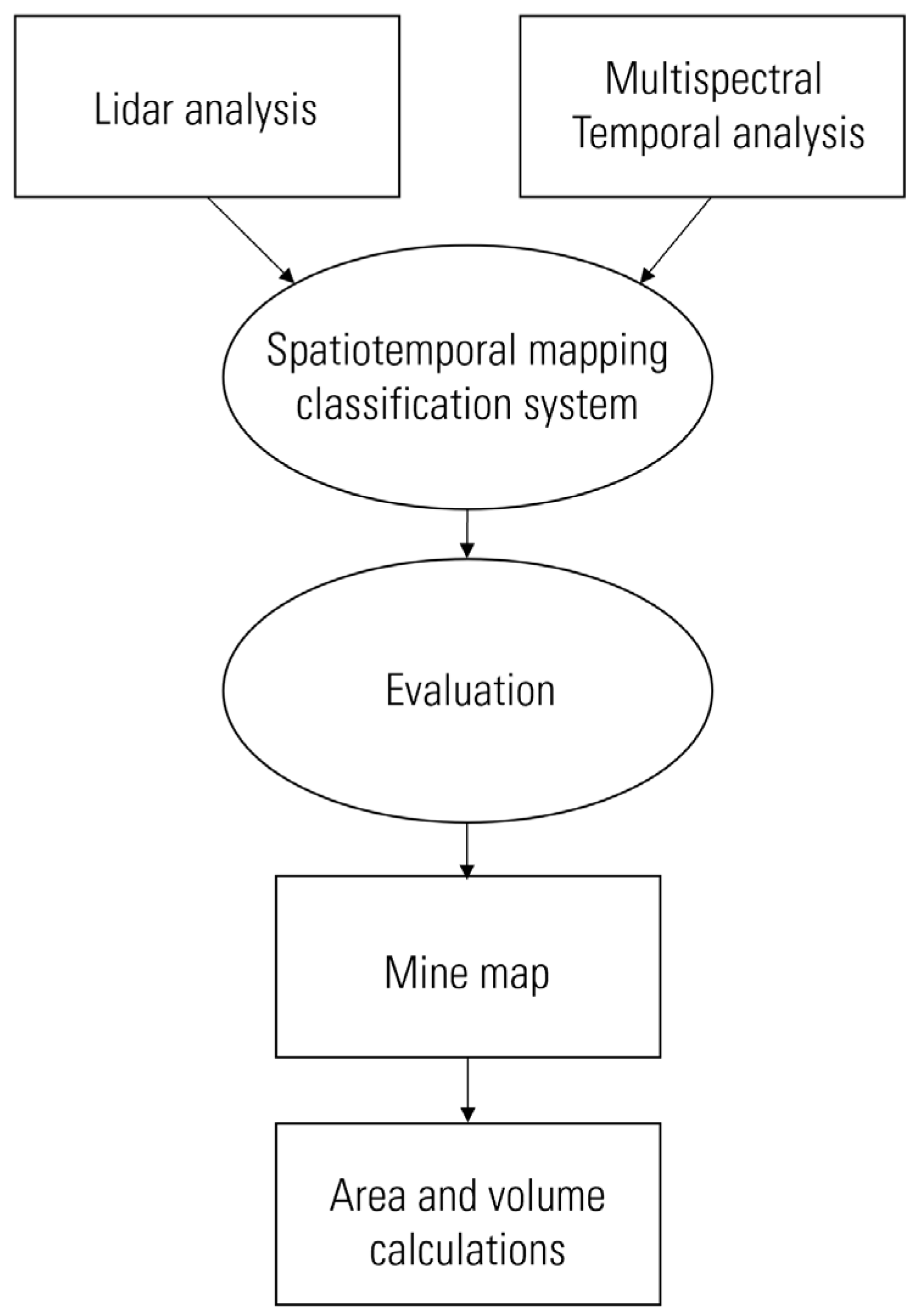
In order to develop indicators defining legitimate mine features and areas of mining disturbance, our strategy was to investigate known mine sites within the study area and test remote sensing techniques that could be used to reveal similar features in other parts of the study area. The Lidar elevation point cloud and derivatives, such as the bare earth elevation surface, slope, topographic contours and texture, and hydrography, are indicative of mine feature geometry. Time-lapse visual interpretation and time-series spectral vectors using the Landsat multispectral imagery helped interpret historical areas of disturbance and the reclamation event sequence representing LCLU change and/or continuity. The flowchart in
Figure 2 summarizes the analytical methods, workflow, and multiple lines of evidence being used in this study. We describe each of these methods and highlight example datasets below for the Lidar topographic analysis and multispectral temporal analysis, leading up to the volume and waste pile characteristics summarized in
Section 3 (Results).
Various Lidar and multispectral data analysis techniques have been published for mine feature identification and characterization [
13]. Multispectral imagery is available globally and commonly used for mine feature detection and monitoring [
4]. Jing [
14] demonstrated that diverse spectral band inputs, such as standard tasseled cap (TC) indices, can be used to improve the detection of anthropogenic landscape disturbances related to mining and reclamation activities. Gitau et al. [
15] used maximum likelihood classification to extract mine features detectable in Sentinel 2 multispectral imagery. The Landsat archive provides more than 50+ years of image acquisition (1972–present). Cloud-hosted geoprocessing platforms (e.g., Google Earth Engine) efficiently process and render immense data collections [
16], thus enabling efficient temporal analysis of land-cover/land-use (LCLU) changes from mining activity and postmining reclamation. Time-series analytical tools, such as the LandTrendr algorithm, have been applied to study vegetation disturbance and track the progression of mining by plotting the normalized difference vegetation index across time [
14].
For areas where mine features are not fully visible using optical spaceborne imagery, Lidar laser scanning can be used to penetrate the vegetation canopy, extract topography, and identify anthropogenic features with high positional accuracy. Lidar point clouds and digital elevation models (DEMs) can be used to derive mine feature geometries, including waste pile and excavation volumes [
17]. Lidar can be used to identify artificially engineered drainage features and fluvial geomorphic erosion characters present on mine waste [
17]. Several geoprocessing toolsets are available to estimate mine feature volume, including the GlobalMapper Cut and Fill tool [
18], which we applied in this study to characterize mine waste. Elevation data can also be used to track changes in the geomorphology of mining and postmining LCLU when multiple timesteps are available [
17]. Historical elevation data are rare, and multiple Lidar acquisitions for the same locations are expensive to produce. Therefore, we augment Lidar analysis with multispectral data analyzed across extended periods of time.
2.1. Uranium Mine Site and Reclamation Procedure Description
The first uranium discovered in Karnes County was mined at the Boso-Hackney mine from an exposed outcrop where uranium-bearing chalk was present on the surface. The 1970s-era hard-rock mining operations extracted bands of ore from often water-bearing subsurface units, which required deeper excavation. The deep mine pits, typically 27–91 m in depth, often filled with the seeping groundwater to produce pit lakes [
12]. These open-pit mine walls were near vertical and were accompanied by nearby waste piles that were approximately 6–24 m high and had steep slopes. The RRC mapped mine sites using aerial surveys [
12] and published reclamation activities at those sites [
2]. These data include mine name, location, reclamation status, reclamation procedures, and dates of reclamation activities that were conducted at individual mine sites. Hall et al. [
1] published comprehensive research on the Texas Coastal Plain geology, uranium production history, including known, currently active, and no longer producing mines, and potentially undiscovered resources [
1,
19].
For this study, the size, depth, excavation method, and timeline of uranium mining activity were used to help differentiate the uranium mines from other excavations, such as lignite mines and industrial rock, sand, and gravel quarries. Oil and gas drill pads are very common features in this region, related to production from the underlying Eagle Ford Shale [
20]. Lignite surface mining operations within the Jackson Group commenced in Atascosa County in 1980. Thin benches (approximately 1 m thick) of lignite were extracted from these mines utilizing dragline excavation methods to remove approximately 30 m of overburden. There is presently one active coal mine in the tri-county region, the San Miguel mine [
21], which is located just outside of the study area outlined in
Figure 1 [
22].
Unstable and steep uranium pit walls and waste pile slopes containing radioactive materials posed health and safety hazards, and deterioration of water quality from sedimentation, metals, salinity, and acidification justified reclamation of these sites [
2]. According to the Railroad Commission of Texas [
2], the reclamation strategy for open-pit uranium mines is to first drain the mine pits of water, then apply standard earthwork procedures to reduce slope of the mine features, followed by revegetation of slopes to manage soil erosion and to maintain the integrity of the earthwork effort. The earthwork processes include salvaging the topsoil, burial of radioactive and acidic materials, flattening of pit and pile walls, addition of topsoil, construction of overland flow drainage canals, and wind and water erosion control. The revegetation process starts with planting a temporary rapidly growing cover crop, followed by the establishment of a permanent grass species [
2,
23]. The study area was selected for analysis because of the existing variety of overlapping remote sensing datasets including temporally continuous Landsat imagery and Lidar data acquired over all three counties. Additionally, advanced multispectral and hyperspectral analyses for uranium-bearing minerals were published for the study area [
5,
24], and documented mine inventories and reclamation procedures [
1,
2,
12] were available and could be used for interpretation, calibration, and validation.
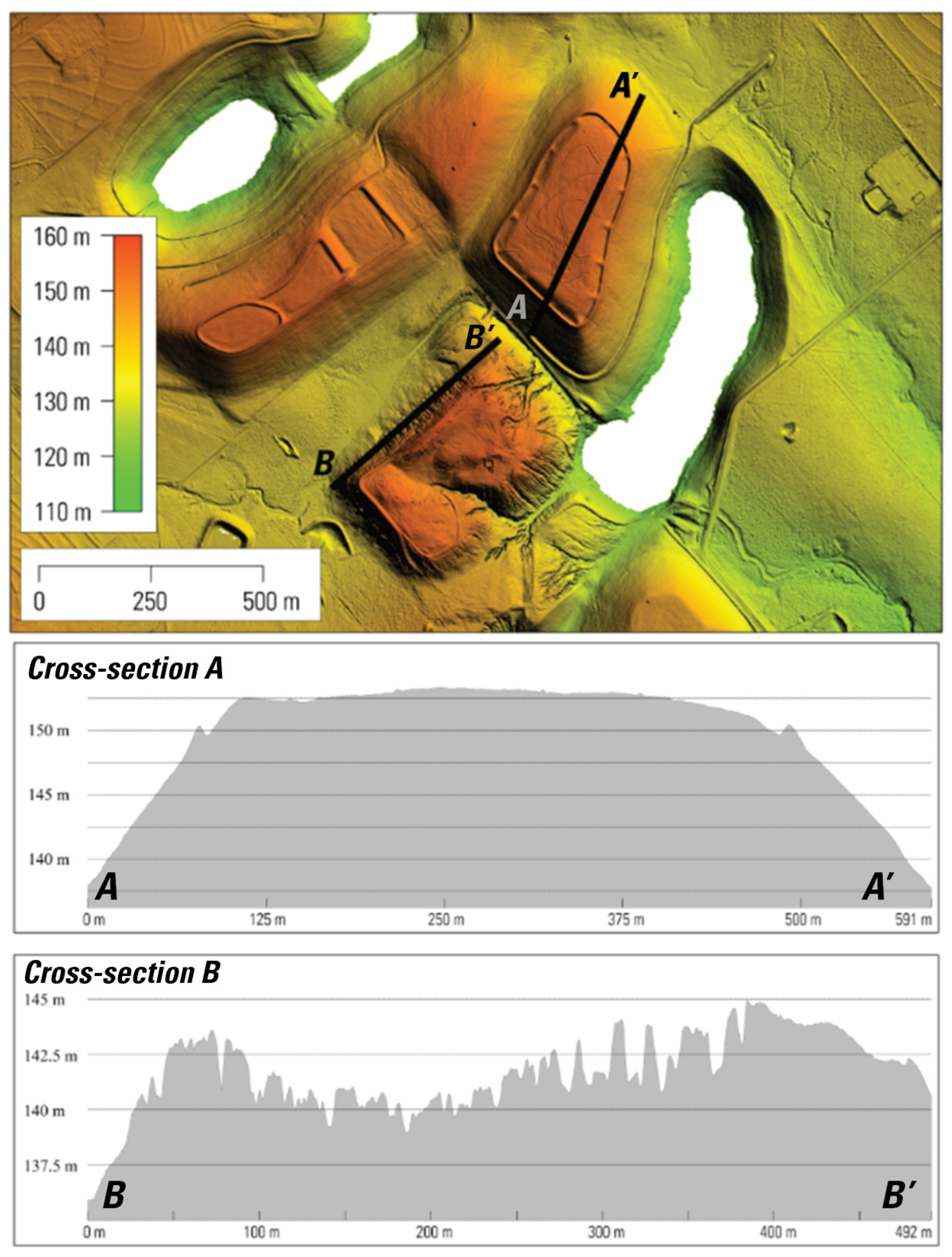
2.2. Lidar 3-D Elevation Analysis of Mine Features and Derivative Data Products
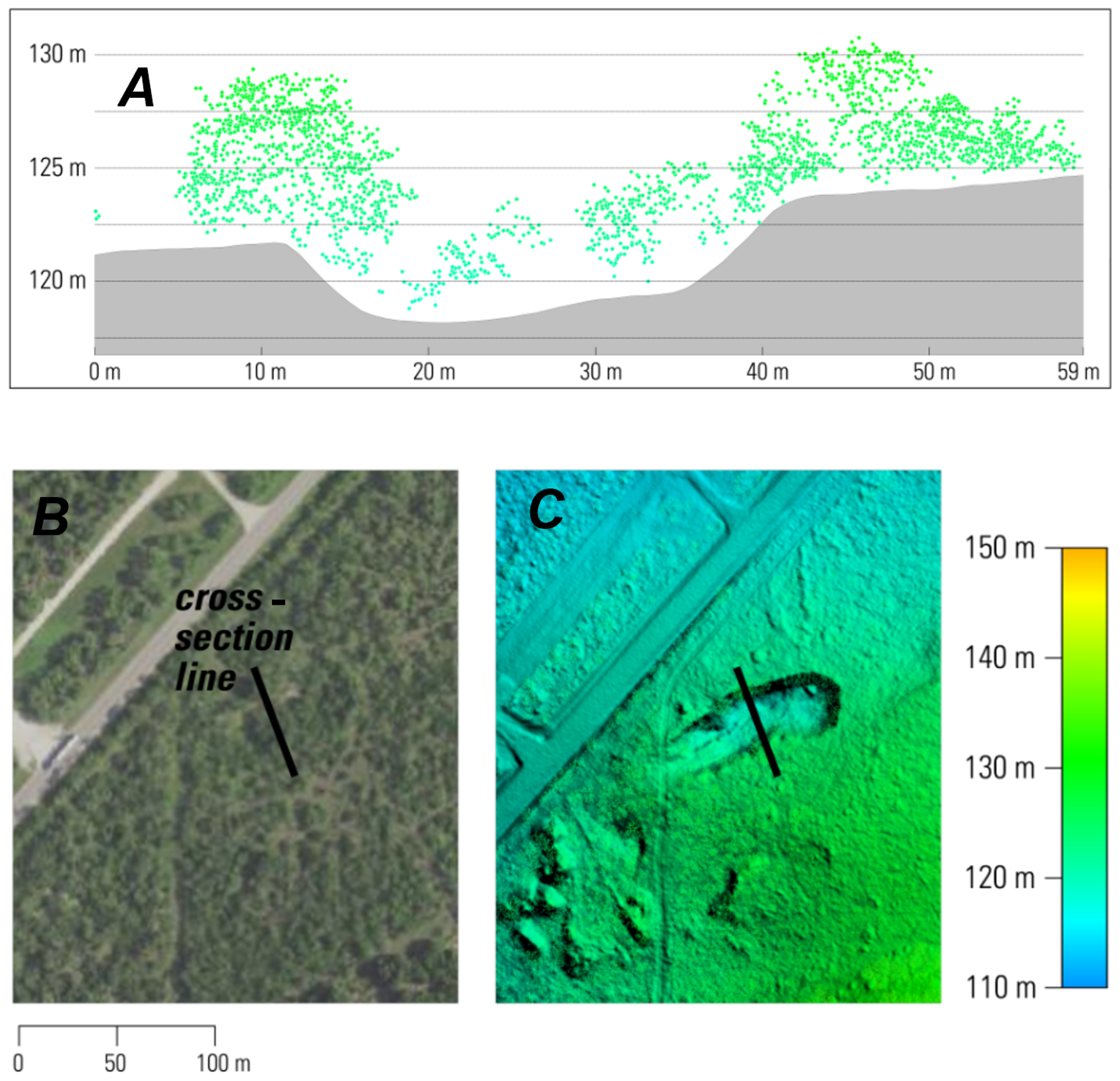
The Lidar 3-D elevation point clouds used in this study were produced from airborne laser scanning in the near-infrared (NIR) spectra. Elevation is determined by the time of the laser reflection return traveling at the speed of light. Each laser return is attributed with high-precision geospatial coordinates (x, y) and elevation (z) values, such that the culmination of the returns delivers a point cloud (
Figure 3). Laser scanning penetrates the vegetation and reveals the vegetation canopy structure, topography, and anthropogenic features present on the landscape, such as excavations, aboveground structures, and infrastructure (
Figure 3). Lidar-derived bare earth DEM, slope, elevation contours, and hydrography were produced as analytical products for this study to explore, identify, and differentiate mine features (
Figure 3 and
Figure 4) using Global Mapper desktop software.
Two Lidar acquisitions were used in this analysis, both acquired at different times over different but overlapping areas. These Lidar data were produced by USGS 3-D Elevation (3DEP) program in collaboration with local stakeholders. At the time of this study, these were the best available and the only two Lidar data coverages published in the public domain for the study area. Both datasets were combined seamlessly using the overlapping area of coverage. A 50 cm nominal point spacing spatial resolution point cloud acquired in 2013 was used to explore Karnes County. The accuracy of that data was reported to have an overall RMSEz (Root Mean Square Error of the z direction) of 7.029 cm for bare earth returns [
25]. A 70 cm nominal point spacing spatial resolution point cloud was acquired in 2018 for Atascosa and Live Oak Counties. The latter dataset has a reported RMSEz of 5.9 cm for checkpoints in non-vegetated terrain and was quality-assurance tested to meet a less than 10 cm vertical accuracy standard [
26].
2.3. Bare Earth Topography
Lidar laser scanning penetrates the vegetation canopy to measure the bare earth surface topographic elevation and often reveals anthropogenic modifications to the landscape, such as mine excavation pits and waste pile features, and areas that were disturbed by mining operations (
Figure 3). Bare earth DEMs were derived from pre-classified ground returns using the Global Mapper Create Elevation Grid tool. All non-terrain surface features present on the landscape (e.g., buildings and vegetation) were removed when generating the final DEM. The bare earth DEMs (e.g.,
Figure 3) were generated at the same spatial resolution as their original Lidar point cloud. Radiation at NIR wavelengths is absorbed by water, therefore the absence of Lidar ground returns is an indicator of the presence of surface water. Gaps in ground returns were intentionally retained surface to reveal pit lake features (
Figure 5). Mine feature geometry and volumes were derived using this bare earth DEM data. The resulting Lidar bare earth DEM products and the detailed processing steps are documented and published in a USGS Data Release [
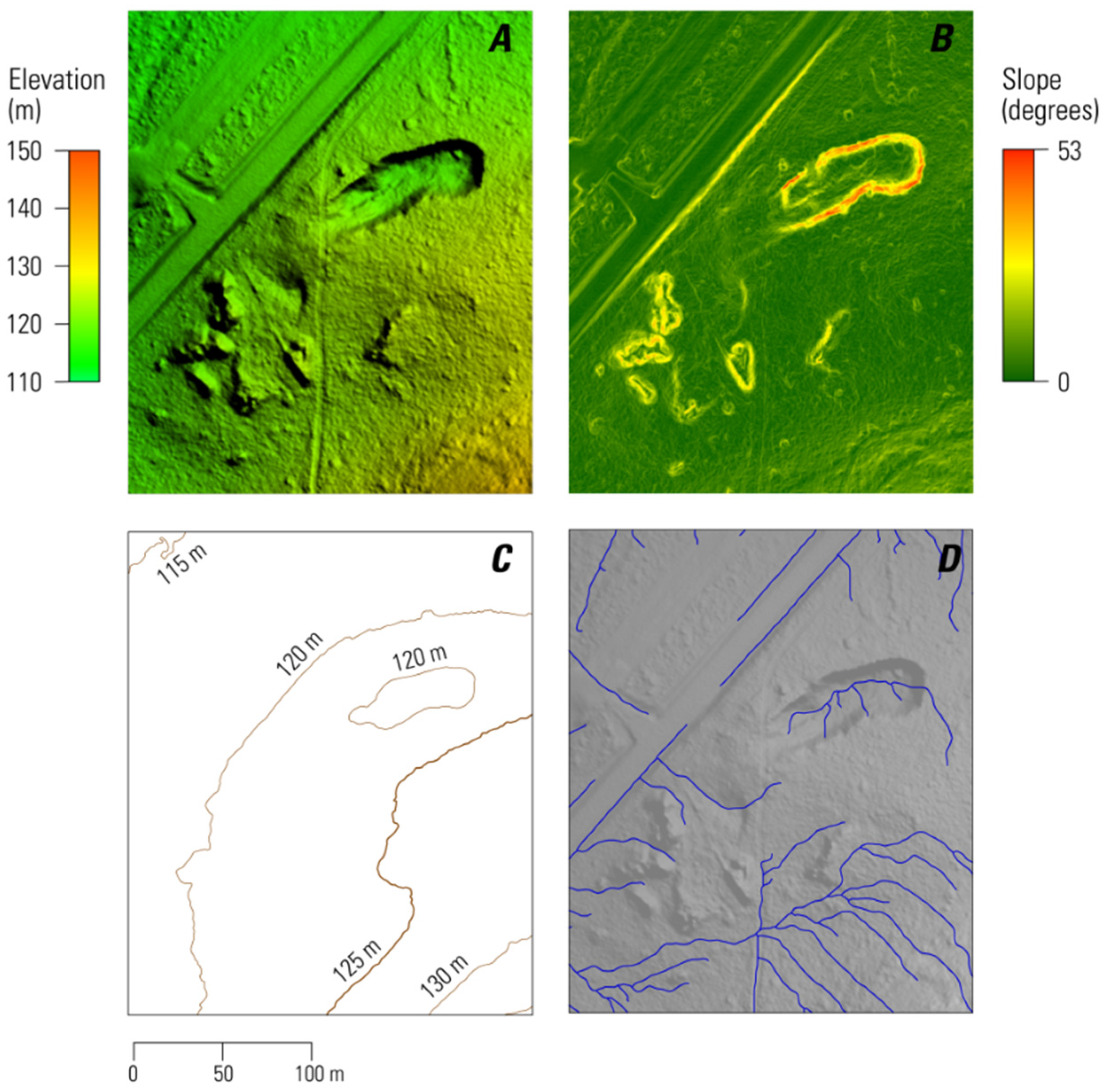
27]. Topographic contour vectors were derived from the bare earth DEM and calculated at 5 m intervals using the Global Mapper Create Contours tool. Topographic contours helped aid in qualitative visual interpretation, thereby further helping us in identifying and differentiating between reclaimed and abandoned mine features (
Figure 4C).
2.4. Slope
Slope was generated from the bare earth DEM data using the ESRI Slope tool where steepness of the land surface was calculated using a 3 × 3 pixel window. Threshold values were grouped into 2 classes based on visual interpretation and values reported by the Railroad Commission of Texas [
2,
12]. These classes were selected to help differentiate abandoned and reclaimed mine pits and waste piles from other natural and anthropogenic features on the landscape. The Gulf Coastal Plain region is observed to contain predominantly gradual slopes less than or equal to 5°, gently dipping toward the Gulf of Mexico. The RRC reported that the reclamation procedures implemented engineered pit and pile walls to have a reduced steepness for safety and control of erosion [
2]. We observed that slopes greater than 5° but less than 14° reveal reclaimed mine pit and pile features. Slopes greater than 20° reveal severe erosion features and steeper wall slopes present at “unreclaimed” or “partially reclaimed” pit excavations and waste piles in the study area, which is consistent with the mine pit and pile slopes reported by the Railroad Commission of Texas [
12] (
Figure 4B). Other natural and anthropogenic features can exhibit such ranges of slopes on the landscape, such as the escarpments observed at Tordilla Hill and fluvial stream channels. However, those features are not numerous within our study area. The slope classes we derive can be considered generalized and simplified for this study.
2.5. Hydrography
The approach for deriving stream hydrography from DEMs produces three datasets; fill depressions (i.e., sinks) in the DEM; flow directions; and, finally, flow accumulation datasets were produced [
28] to be vectorized into a stream network representing the surface hydrology overland flow pattern (
Figure 4D). For this study, the Global Mapper Create Watershed tool was used to generate such watershed analysis. The first step in the conventional process is to fill depressions to force connectivity of stream vectors; however, because our goal is to reveal hydrographic sinks (i.e., mine pits), we reduced the depth threshold for the sinks to 0.2 m so that the resulting stream vectors are intentionally segmented. Disruptions in the stream vector continuity produced with adjusted sink depth threshold values help reveal mine- or quarry-related features and areas of mine disturbance in the study area (
Figure 4D).
The mine features in our study area have distinct hydrographic characteristics which aid in their visual interpretation. Natural stream vectors tend to create branching patterns as tributaries converge and accumulate on the gentle sloping Gulf Coastal Plain landscape. Reclaimed mine features have engineered water channels needed to manage erosion. Therefore, hydrography helps reveal such artificially engineered features, as well as erosion features (e.g., gullies) on unreclaimed mine pits and waste piles. Surface water lakes and ponds in the study area are also observed to be of anthropogenic origin. Stream impoundments have a clear connectivity with natural hydrographic patterns. For example, features such as ponds developed for watering livestock are created by constructing earthen dams that intercept naturally occurring streams. In contrast, the extraction of uranium ore from the groundwater-saturated lithologic members often results in excavation pits filling with groundwater, thus creating pit lakes. These water bodies do not follow natural surface hydrographic patterns in the study area and disrupt the observed natural hydrography. Shallow pits mined at surface outcrops (the Boso-Hackney mine) do not appear to have been excavated to the depth that would tap groundwater and, therefore, shallow dry pits are also present as well—these excavations can potentially hold ephemeral pools that trap surface water runoff from precipitation events.
2.6. Texture
The use of the high-spatial-resolution bare earth DEM and slope data reveals topographic textures. We illustrate the McCrady–Wright mine feature as an example in
Figure 5. The reclaimed features display a smooth surface texture created by re-engineered slopes during the earthwork phase of reclamation (
Figure 5). Rough texture and steep slopes (i.e., slope greater than 80°) together identify areas of erosion, resolving erosion gullies that are present on the abandoned mine features (
Figure 5). Texture was visually interpreted to classify mine features as either reclaimed or abandoned.
2.7. Temporal Analysis of Mine Life Cycle
Temporal analysis was used to explore the life cycle of mining and to provide evidence for reclamation activity to map and classify mines. The temporal analysis included both quantitative time-series and qualitative time-lapse image interpretations. Notably, we used these two approaches in tandem to support the interpretation of the LCLU changes in the mining areas, which included the presence or absence of actual reclamation temporal sequence signals in and around the mine features.
Google Earth Engine (GEE) enabled us to efficiently render imagery, filter and screen them for suitable cloud conditions and image quality, and visualize and iterate both seasonally and annually through the cloud-hosted Landsat archives, from 1972 to present. GEE was also used to generate rapid quantitative results, which included spectral vector time-series plots representing LCLU changes or continuity over time. Examples of this GEE time-series analysis is shown in the next sections describing both “Qualitative Time-Lapse Interpretation” and “Quantitative Time-Series Analysis” for one of the mine site, namely, the McCrady–Wright features shown in
Figure 6 and
Figure 7.
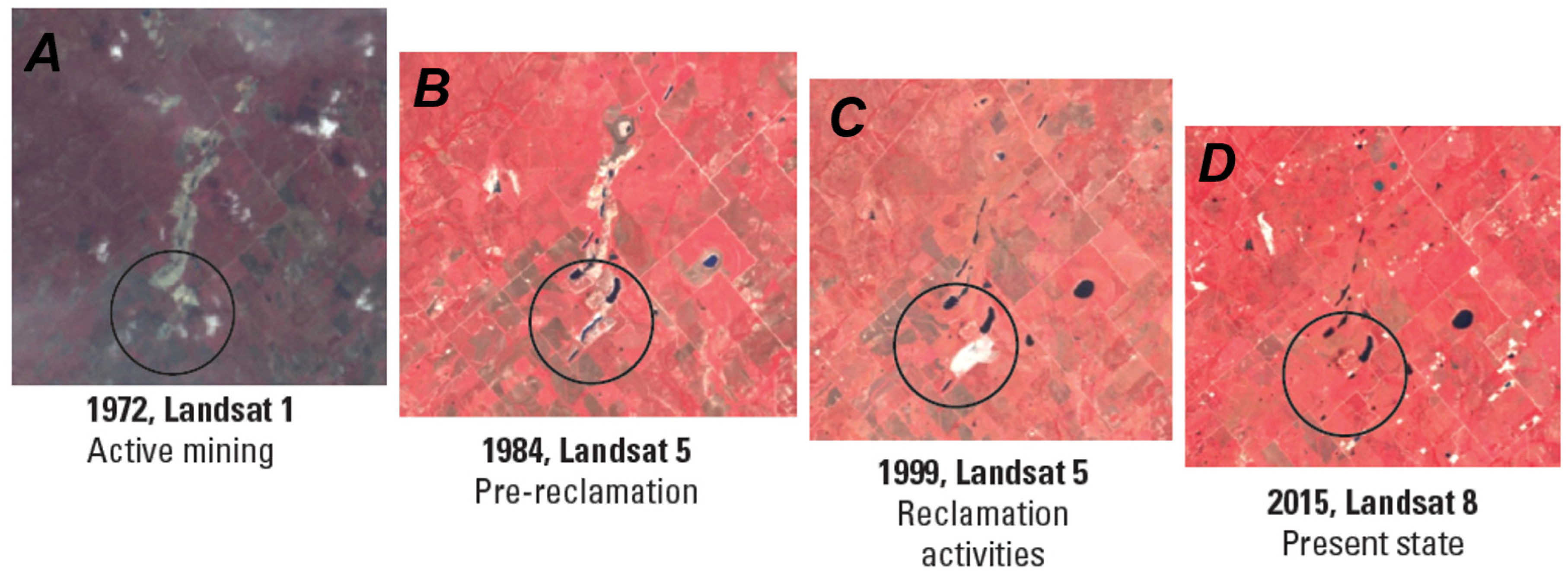
2.8. Qualitative Time-Lapse Interpretation
The temporal life cycle of mining activities starts with land disturbance (
Figure 6A), then progresses into the appearance of distinct mine pit and pile features (
Figure 6B). The latter may be followed by either the reclamation activities described in
Section 2.2 (
Figure 6C) or by abandoned mine features remaining on the landscape. Distinguishing characteristics left behind during the latter stage include readily identifiable features such as exposed bare earth with severe erosion features, which are amenable to detection using spectral remote sensing methods [
5,
24]. These mine pit and waste pile features are notably present in clusters, where reclaimed and abandon features often coexist adjacent to one another, especially those within the Karnes County portion of the study area.
We used the imagery to visually inspect for mining activity, by starting to examine images taken by Landsat 1 in the summer of 1972. For the Landsat 1 through Landsat 4 sensors, 60 m spatial resolution, and Tier 2 data quality were used when Tier 1 data were not available. With the introduction of Landsat 5 in 1984, 30 m spatial resolution Tier 1 surface reflectance was consistently available for time-lapse analysis. The 30 to 60 m spatial resolution effectively captures the shape and spatial extent of mining features used in both our time-lapse visual interpretation and spectral-based quantitative time-series analysis.
The GEE user interface was used to filter the Landsat archive and select the imagery that best revealed the progression of mining activities with minimal cloud cover. Imagery was visualized by generating a false-color infrared composite where the near-infrared, red, and green wavelength channels are displayed as red, green, and blue, respectively. These images were used to visually interpret surface features, including vegetation (which appears red—
Figure 6A–D), water, and exposed bare earth (which appears white, e.g.,
Figure 6C). Visual/interpretation elements of color pattern, texture, shape, and size were reviewed to follow the progression of mining over the decades, as illustrated in
Figure 6A–D. Mining was most active in the study area in the early 1970s [
12].
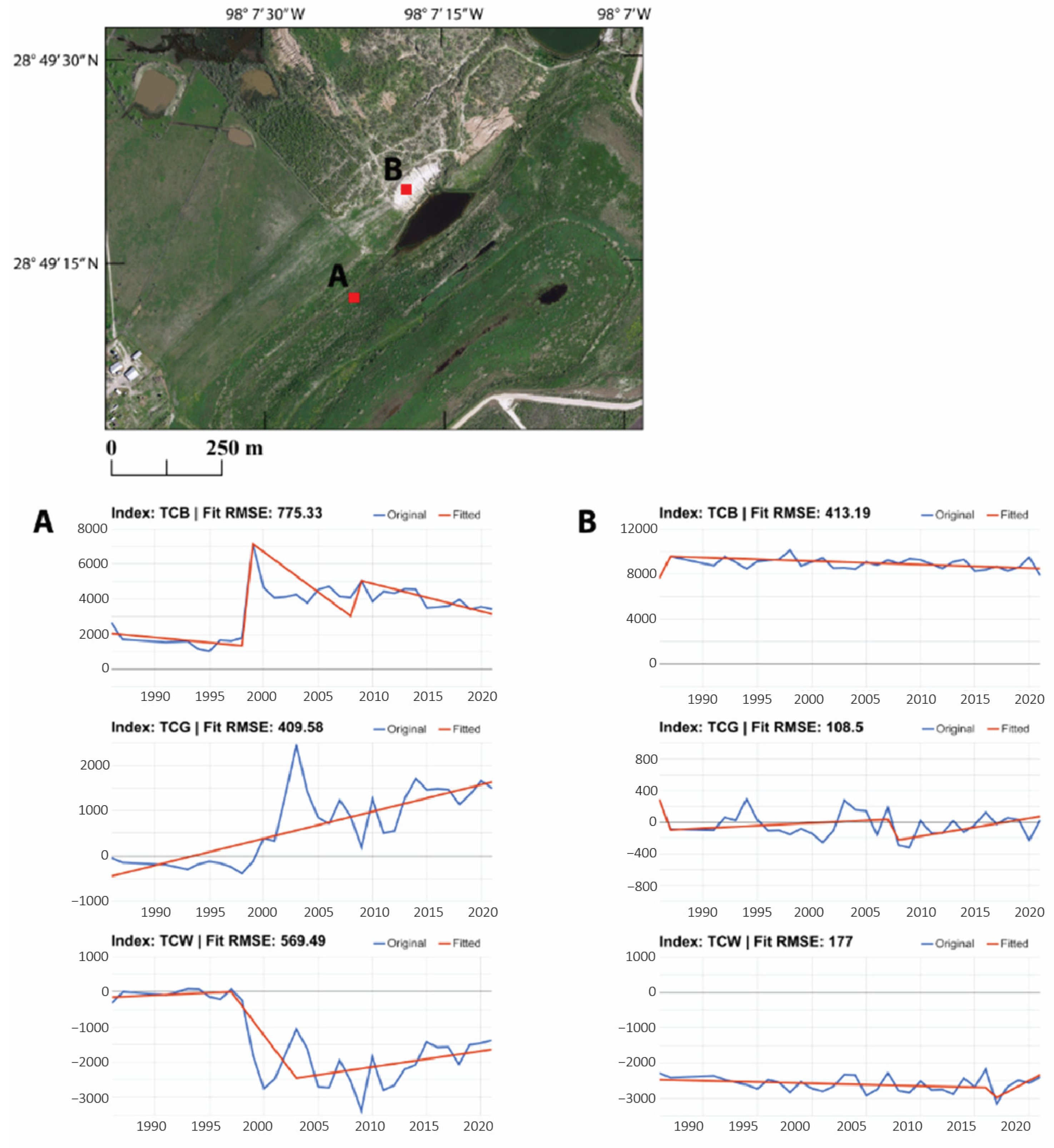
2.9. Quantitative Time-Series Analysis
The LandTrendr Pixel Time Series Plotter user interface of GEE was used to graphically plot surface reflectance values indicative of the LCLU over time. The algorithm calculates a median spectral value from the summer season and plots one value per year. A temporal break-point in the spectral vector is representative of a land cover change event. In contrast, a continuous flat-line-shaped spectral vector is indicative of no change ([
29] and references included therein). For a single 30 × 30 m pixel in the surface-reflectance-calibrated Landsat thematic mapper (TM) archive (1984—present), the LandTrendr algorithm in Google Earth Engine (LT-GEE) extracts and plots various spectral indices that produce spectral vectors representative of either LCLU change or continuity [
29] (
Figure 7). The LT-GEE tool uses Landsat 5 through Landsat 8 imagery; therefore, it analyzes the surface features present on the landscape between 1984 and present.
Tasseled cap transformation spectral indices were selected to reveal trends in LCLU type on the spatial scale of a single 30 m Landsat pixel over time as follows: (1) tasseled cap wetness (TCW), (2) tasseled cap brightness (TCB), and (3) tasseled cap greenness (TCG) [
30]. High TCW values represent surface water, while lower values represent varying degrees of soil moisture. TCB represents the brightness of bare soils as a function of various factors, including mineralogy, moisture, and organic matter content. TCG values represent the presence of photosynthetic biomass. With respect to the life cycle of mining activities, reclamation is revealed by shifts in these spectral vectors (
Figure 7A), whereas continuous spectral vectors reveal the absence of reclamation events during the period of observation (
Figure 7B). The results of this analysis are summarized in
Section 3 and tables described therein and discussed further in
Section 4.
2.10. Spatiotemporal Mapping Classification System of Mine Features
The goal of the “multiple lines of evidence” classification system design was to be able to uniquely distinguish individual mine feature classes. For each mine site in the Karnes County calibration area (
Figure 1), the geospatial data derived from the Lidar point cloud (i.e., bare earth, topographic texture and contours, hydrography, and slope) were used in combination with the temporal analysis (i.e., time-series and time-lapse image interpretations) to identify mine features and to determine if a feature underwent reclamation or was abandoned based on the unique parameters outlined in the classification system shown in
Table 1. The data thresholds used to differentiate classes were selected based on reported thresholds described in previous sections (e.g., slope thresholds) and further interpreted based on the manual sensitivity of the geospatial data layers’ ability to be used to uniquely capture the respective mine feature classes. The interpretation of the areas of disturbance relied heavily on the bare earth textures surrounding mine features and documented mines. Mine name labels were assigned based on published point locations [
1,
2,
12].
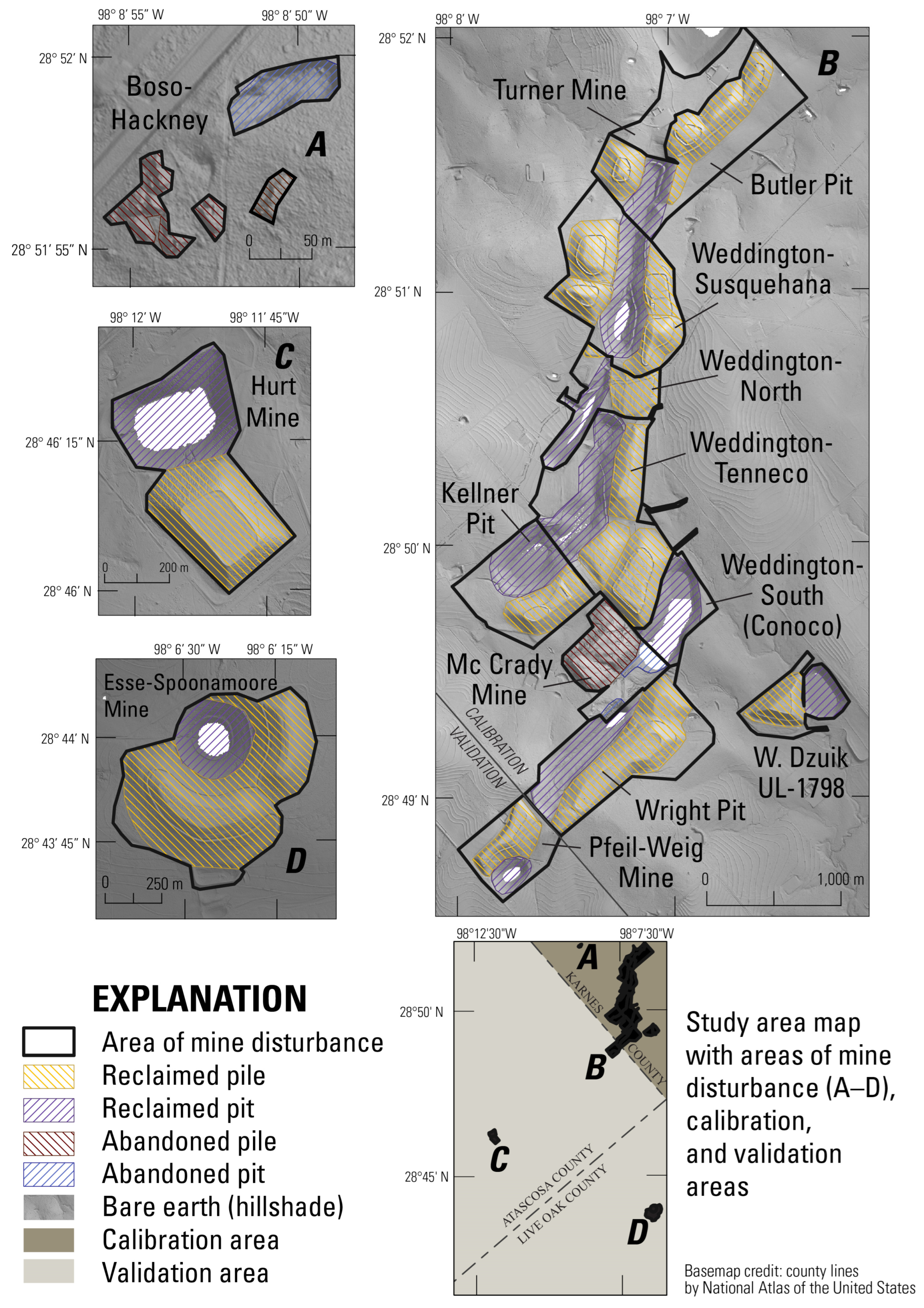
2.11. Method Evaluation
In order to validate our methodology, we divided our study area into a calibration area (Karnes County) and a blind validation portion for the remainder of the study area (Atascosa and Live Oak Counties) (
Figure 1). Karnes County was chosen because of the known and documented mines in this county as discussed in previous sections. We used well-documented information from mine sites in the calibration area to develop our classification system. This system was then applied toward identifying abandoned and reclaimed mine features in the validation area. The total surface areas of associated mine disturbance features were delineated to create vectorized “mine feature extent” maps (
Figure 8), which are also available digitally as a USGS Data Release [
27].
Notably, the location and number of mines in Atascosa and Live Oak Counties were not reviewed in advance, and, therefore, the validation portion of the study area served as an area of “blind analysis.” The goal of the blind validation was to assess the success of the classification system with the intent of iteratively refining our classification approach.
2.12. Mine Area and Volume Estimation
Once the features were mapped using the classification system, mine area calculations were estimated for mine pit and pile features and for the areas of disturbance; volume was estimated for pit and pile features. We applied two methods for deriving mine feature volume. A simple comparison of these two volume estimation approaches was conducted to gauge outcomes and to help identify and describe limitations because verified waste-rock pile surveys were unavailable and their base elevations were unknown. For all mines, we used the Global Mapper “Cut and Fill” tool [
18] to estimate volume from the postmining Lidar-derived bare earth topography. The Cut and Fill tool interpolates a flat planar surface in the space between elevation points sampled from the mine feature polygon to then “cut” a base height from which pit and pile volumes are estimated.
Where historical DEM data represented the premining terrain topography, these data were utilized to capture the complexity of natural depressions or rises in landscape geometry, in our hope to advance volume estimations beyond the simplified flat planar surface interpolated by the Cut and Fill tool. These data were obtained from the USGS NED [
31]. The one-third arc-second (approximately 10 m) spatial resolution NED DEM revealed historical premining land surface elevations at 4 of the 14 documented mines in the study area. The NED DEM was resampled to a 50 cm spatial resolution to be consistent with and to retain the native spatial resolution of the 2013 Lidar-derived bare earth DEM using bilinear resampling. Volume estimates were calculated for the mine feature extents by taking the geomorphic difference between the historical premining resampled NED DEM and the Lidar-derived bare earth postmining topography. For both volume estimation approaches, bathymetric data for pit lakes were unavailable; therefore, mine pits were eliminated from volume analysis if the presence of water was detected.
3. Results
Table 2 summarizes the results of applying the classification system (
Table 1) to known mine pit and waste pile sites compared to published ground truth information from RRC [
2,
12] and Hall et al. [
1]. Our ability to identify mine sites as either reclaimed or unreclaimed yielded consistent results when compared to the published data. Fourteen mine pit and/or waste pile sites were documented and mapped in the study area—where mine pit and pile features covered an area of 496 hectares, and the total area of disturbance was 649 hectares (
Table 3). The calibration area contained 11 uranium mines. The blind validation area revealed 3 additional uranium mines, all of which were known mines after applying our classification approach (
Table 1). Of the 14 mines in the study area, 12 were documented as reclaimed. The following two mines were classified as unreclaimed: (1) McCrady waste pile, which was documented by the RRC as unreclaimed, and (2) Boso-Hackney mine, which was documented as partially reclaimed (
Table 2). Fourteen mine pits were observed, of which two were dry.
Volume was estimated for the two dry pits (579,717 m
3) using the Cut and Fill approach. Of the 14 documented mines, 21 waste-rock piles were detected and resulted in a total volume of 20 million m
3 (
Table 3), using the Cut and Fill approach.
Historical premining terrain data were available at 4 of the 14 documented mines, as follows: Butler pit and piles, Kellner piles, Weddington-north piles, and the Weddington-Susquehana piles (
Table 3). When we compared the total volume estimate for these four mines, the Cut and Fill tool consistently calculated lower volumes compared to the historical DEM-derived volumes (−21%) (
Table 3).
5. Conclusions
We studied known abandoned and reclaimed mine sites in order to develop a spatiotemporal mapping classification system, which utilizes multiple quantitative and qualitative remote sensing methods. This was done to (1) identify uranium mine waste-rock, waste-water, and the total area of land disturbance due to mining; (2) differentiate abandoned and reclaimed mine features; and (3) derive mine feature volumes. This work ultimately contributes to a better understanding of the life cycle of mining activities on the Texas Coastal Plain landscape. The classification system was designed to help identify and differentiate mining features from non-mining features such as abandoned mine pits, pit lakes, and waste-rock piles, as well as reclaimed mine pits, lakes, and waste-rock piles.
As such, multiple lines of evidence were gleaned from the analysis of the Lidar 3-D elevation point cloud and derivative products, including bare earth, slope, topographic contours, and overland-flow hydrography. Because our Lidar datasets captured single points in time, we supplemented them with temporal analyses of the LCLU changes over time. The latter analyses included time-lapse and time-series spectral indices, such as TCB, TCW, and TCG, which, respectively, detect land-cover brightness, wetness, and greenness. Temporal analysis of these spectral indices allowed us to explore the temporal life cycle of mining. The mapping classification system was blind tested over a portion of the study area in order to assess the success of the approach in revealing uranium mine features. Future work could benefit from fusing these methods with spectral-based mineral mapping and geophysical methods that can help detect radioactive and uranium-bearing minerals.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}