
Salp Swarm Algorithm-Based Kalman Filter for Seamless Multi-Source Fusion Positioning with Global Positioning System/Inertial Navigation System/Smartphones


Abstract
1. Introduction
- (1)
- A smartphone-based salp swarm-optimized I/O detection algorithm is proposed; it designs a suitable fitness function and searches for optimal dynamic switching parameters to achieve reliable detection in the presence of different devices and environments.
- (2)
- To perform the evaluation of the proposed algorithm in a classic I/O scenario, the proposed method was compared with several machine-learning- and sensor-data-based detection methods. The experimental results showed that the proposed algorithm achieved higher I/O detection accuracy in complex scenarios than the other algorithms in the test environment.
- (3)
- The proposed I/O detection service was used as an automatic switching mechanism to achieve accurate and seamless indoor–outdoor localization with an integrated solution based on Kalman filtering improved with Kullback–Leibler divergence.
2. Materials and Methods
2.1. GPS/INS Fusion Model
2.1.1. GPS/INS State Model
2.1.2. Inertial Navigation Model
2.1.3. GPS/INS Observation Model
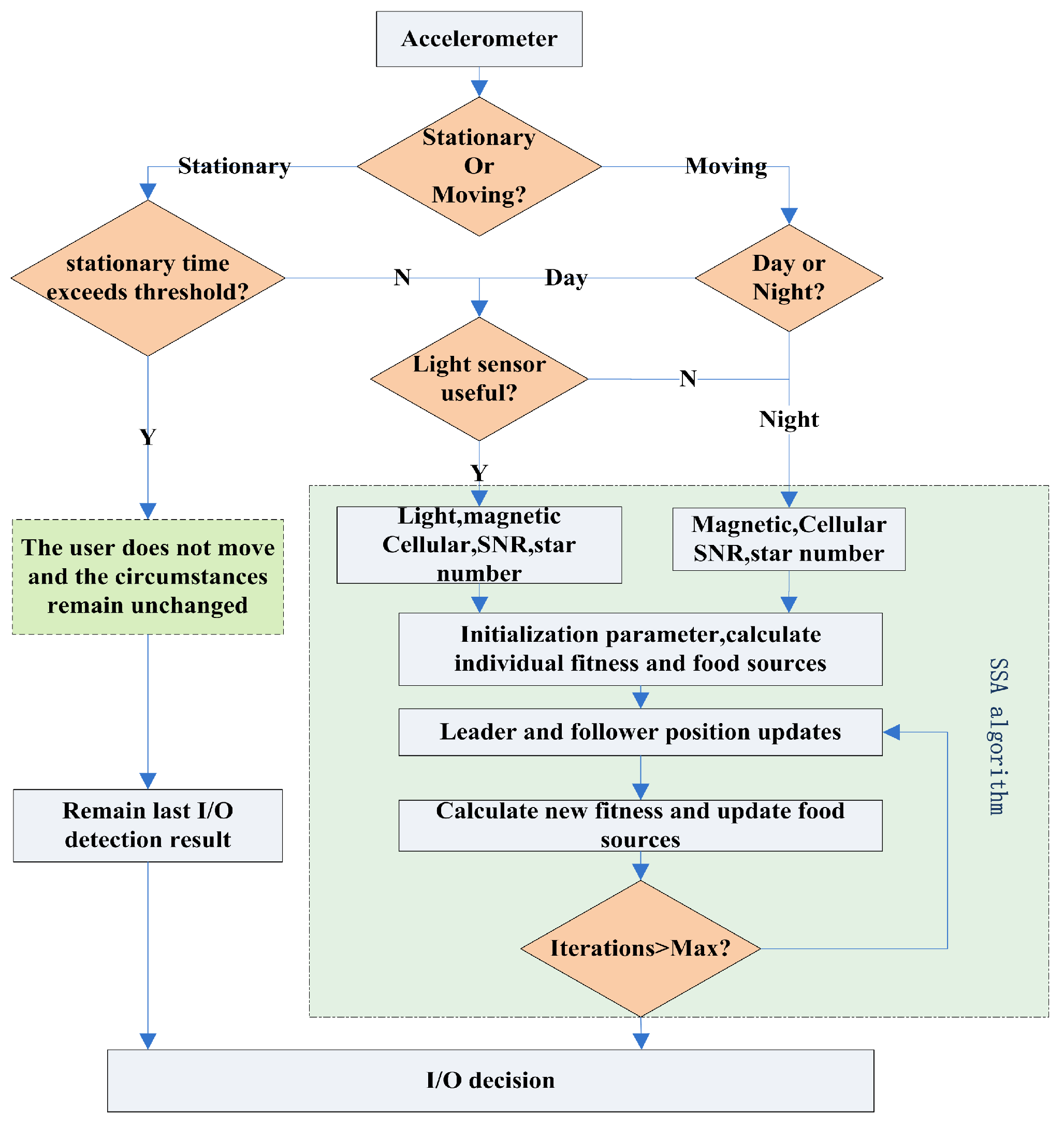
2.2. Indoor/Outdoor Detection Algorithm Based on Salp Swarm Optimization
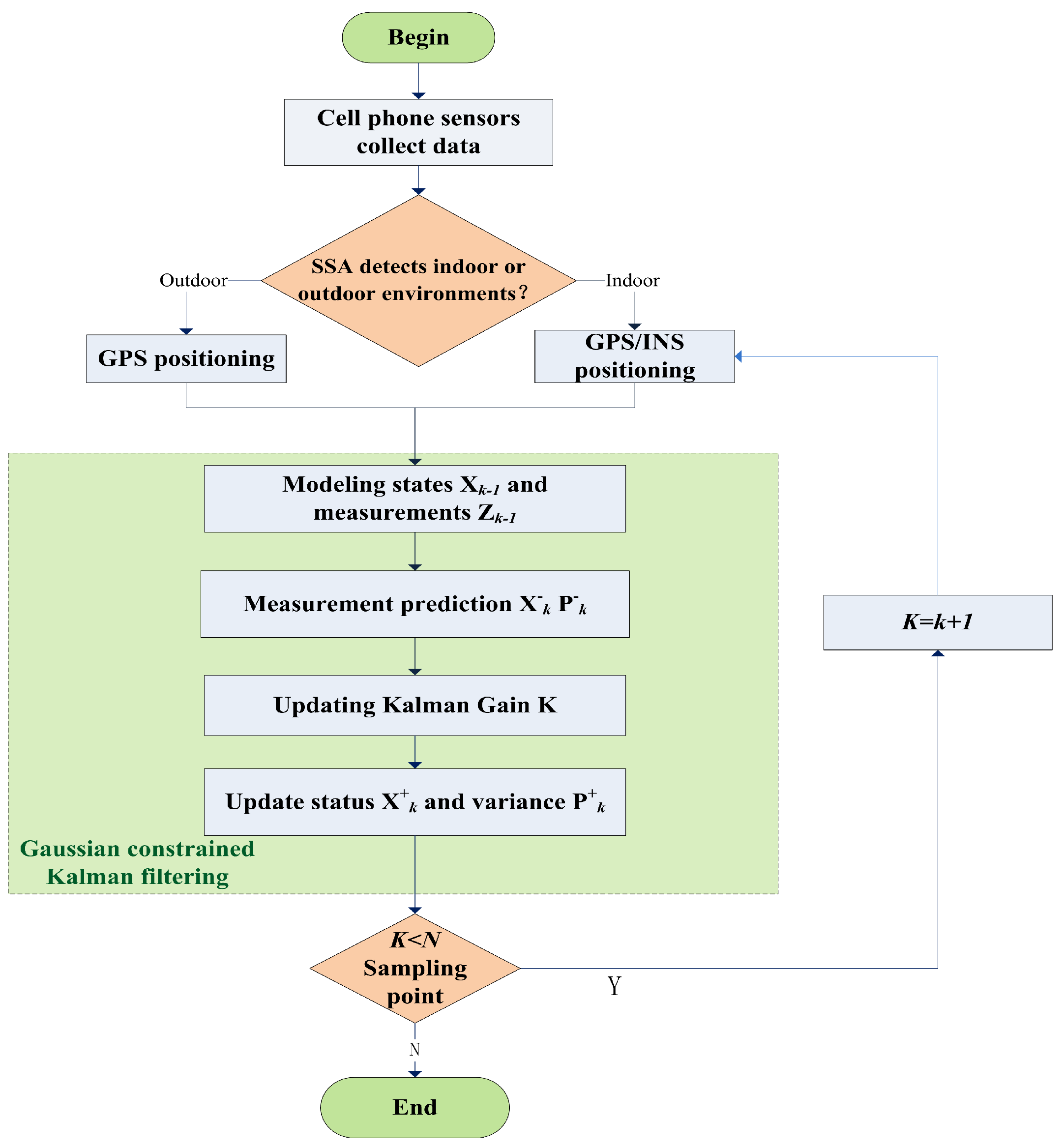
2.3. Improved Kalman Filtering Algorithm Based on Kullback–Leibler Divergence
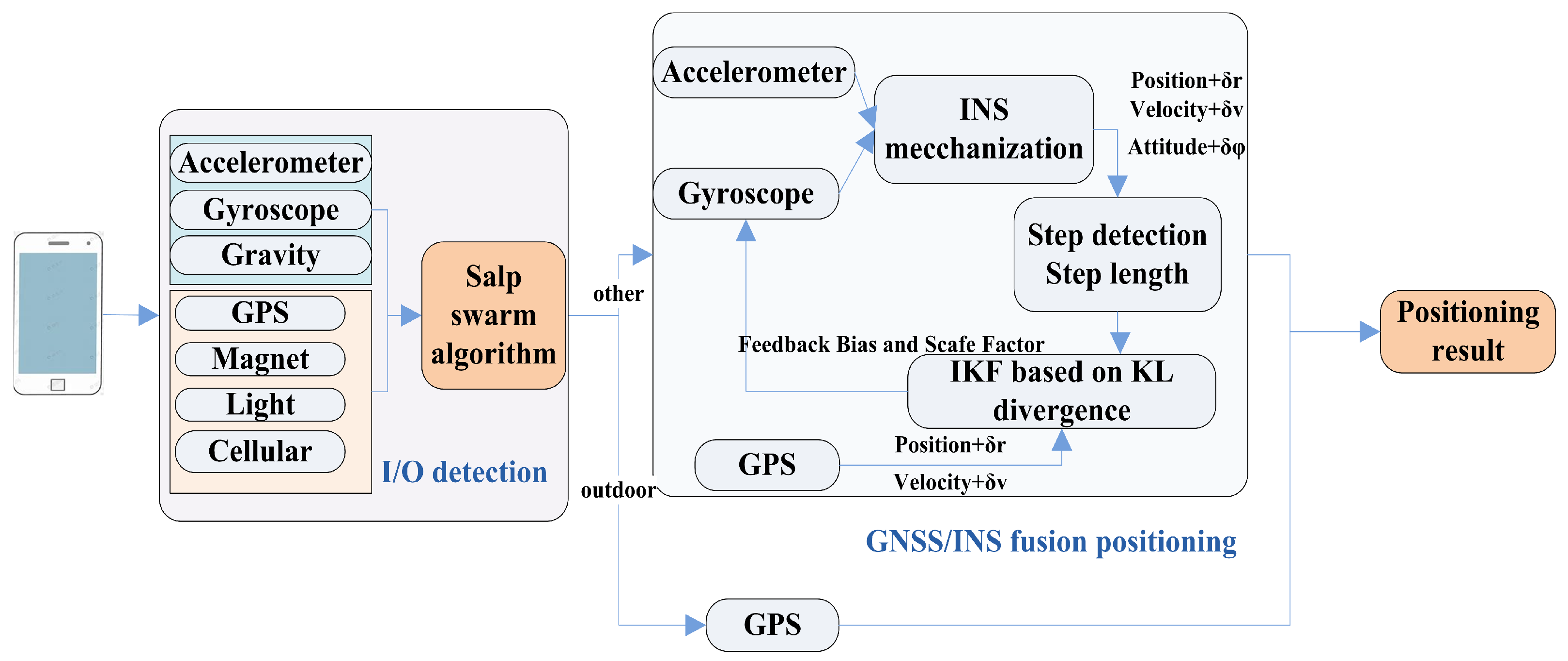
2.4. System Architecture
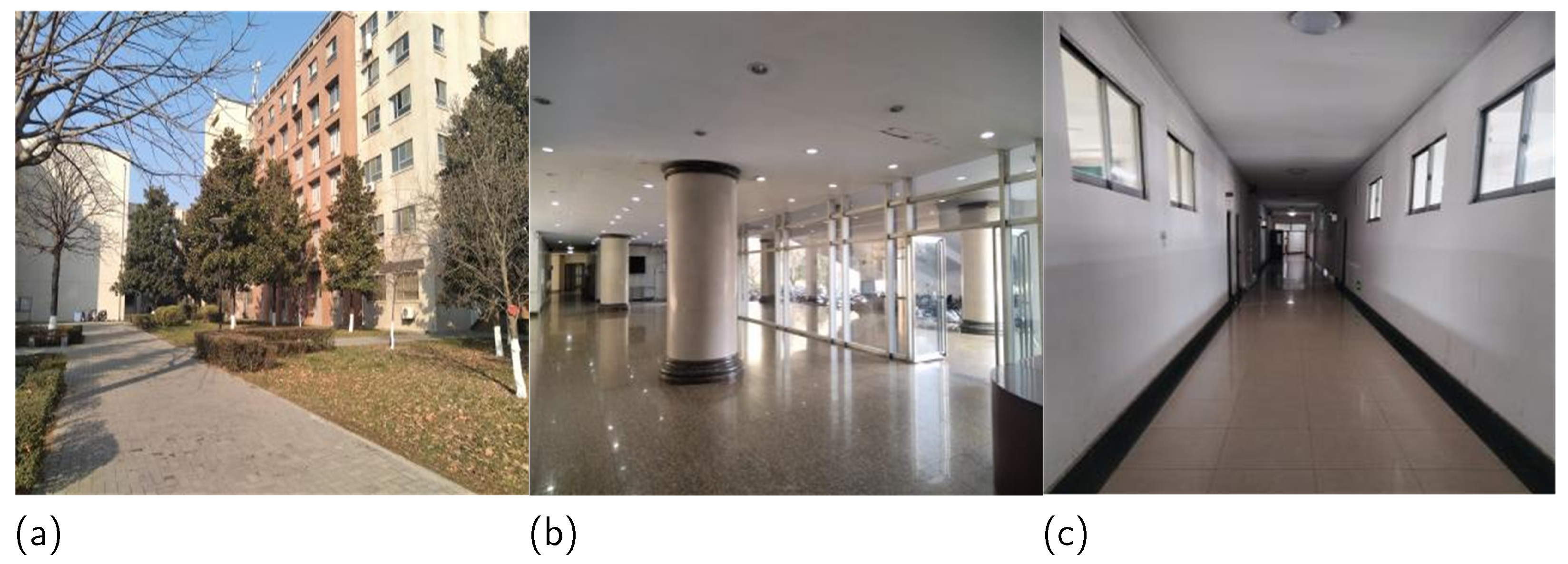
3. Experiment Results and Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AKF | Adaptive extended Kalman filter |
| ANN | Artificial neural network |
| CDF | Cumulative distribution function |
| DT | Decision tree |
| GGF | General Gaussian filtering |
| GNSS | Global navigation satellite system |
| GBM | Gradient-boosting machine |
| I/O | Indoor/outdoor |
| IOD | Indoor/outdoor detection |
| IOS | Indoor, outdoor, and semi-indoor |
| INS | Inertial navigation system |
| KNN | k-nearest neighbor |
| PPP | Precision point positioning |
| RMS | Root mean square |
| RF | Random forest |
| SSA | Salp swarm algorithm |
| SVM | Support vector machines |
| UWB | Ultra-wideband |
| UKF | Unscented Kalman filter |
References
- Lu, D.; Zhang, Y.; Wang, J. Adaptive Delay-Free Filtering Based on IMU for Improving Ship Heave Measurement. Sensors 2023, 23, 9791. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Zheng, J.; Di, S.; Xiang, G.; Guo, F. A Beacons Selection Method under Random Interference for Indoor Positioning. Remote Sens. 2022, 14, 4323. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, C.; Zhang, D. Data Fusion Based on Adaptive Interacting Multiple Model for GPS/INS Integrated Navigation System. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef]
- Jiang, X.; Liu, T.; Duan, J.; Hou, M. Attitude Algorithm of Gyroscope-Free Strapdown Inertial Navigation System Using Kalman Filter. Micromachines 2024, 15, 346. [Google Scholar] [CrossRef] [PubMed]
- El-Sheimy, N.; Abdel-Hamid, W.; Lachapelle, G. An adaptive neurofuzzy model for bridging GPS outages in MEMS-IMU/GPS land vehicle navigation. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation, Long Beach, CA, USA, 24 September 2001; pp. 1088–1095. [Google Scholar]
- Aggarwal, P.; Bhatt, D.; Devabhaktuni, V.; Bhattacharya, P. Dempster Shafer neural network algorithm for land vehicle navigation application. Inf. Sci. 2013, 253, 26–33. [Google Scholar] [CrossRef]
- Xie, H.; Cheng, X.; He, S.; Li, Y.; Pang, J.; Li, S. MF-ANN: A Novel Artificial Neural Network-Based Method for Ocean Wind Speed Retrieval on Spaceborne GNSS-R Signal. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5802617. [Google Scholar] [CrossRef]
- Jiang, W.; Cao, Z.; Cai, B.; Li, B.; Wang, J. Indoor and outdoor seamless positioning method using UWB enhanced multi-sensor tightly-coupled integration. IEEE Trans. Veh. 2021, 70, 10633–10645. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, L.; Wang, Y.; Yang, Z.; Liu, Z.; Wang, C. Variance optimization of UWB observation based on map matching for PPP/INS/UWB tightly coupled positioning. Meas. Sci. Technol. 2021, 32, 025007. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, H. A Multi-Step Pseudo-Measurement Adaptive Kalman Filter Based on Filtering Performance Evaluation and Its Application in the INS/GNSS Navigation System. Remote Sens. 2024, 16, 926. [Google Scholar] [CrossRef]
- Tang, Y.; Jiang, J.; Liu, J.; Yan, P.; Tao, Y.; Liu, J. A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage. Remote Sens. 2022, 14, 752. [Google Scholar] [CrossRef]
- Li, Z.; Lee, P.-H.; Hung, T.H.M.; Zhang, G.; Hsu, L.-T. Intelligent Environment-Adaptive GNSS/INS Integrated Positioning with Factor Graph Optimization. Remote Sens. 2024, 16, 181. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, T.; Wang, D. A Novel UWB Positioning Method Based on a Maximum-Correntropy Unscented Kalman Filter. Appl. Sci. 2022, 12, 12735. [Google Scholar] [CrossRef]
- Farag, W. Self-Driving Vehicle Localization using Probabilistic Maps and Unscented-Kalman Filters. Int. J. ITS Res. 2022, 20, 623–638. [Google Scholar] [CrossRef]
- Hajati, N.; Rezaeizadeh, A. A Wearable Pedestrian Localization and Gait Identification System Using Kalman Filtered Inertial Data. IEEE Trans. Instrum. Meas. 2021, 70, 2507908. [Google Scholar] [CrossRef]
- Kim Geok, T.; Zar Aung, K.; Sandar Aung, M.; Thu Soe, M.; Abdaziz, A.; Pao Liew, C.; Hossain, F.; Tso, C.P.; Yong, W.H. Review of Indoor Positioning: Radio Wave Technology. Appl. Sci. 2021, 11, 279. [Google Scholar] [CrossRef]
- Huang, J.; Junginger, S.; Liu, H.; Thurow, K. Indoor Positioning Systems of Mobile Robots: A Review. Robotics 2023, 12, 47. [Google Scholar] [CrossRef]
- Zhou, P.; Zheng, Y.; Li, Z.; Li, M.; Shen, G. IODetector. A generic service for Indoor Outdoor Detection. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, Toronto, ON, Canada, 6 November 2012; pp. 113–126. [Google Scholar]
- Ashraf, I.; Hur, S.; Park, Y. MagIO: Magnetic Field Strength Based Indoor-Outdoor Detection with a Commercial Smartphone. Micromachines 2018, 9, 534. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Wu, X.; Su, Z.; Li, L.; Bai, Z. Improved Adaptive Federated Kalman Filtering for INS/GNSS/VNS Integrated Navigation Algorithm. Appl. Sci. 2023, 13, 5790. [Google Scholar] [CrossRef]
- Sun, R.; Zhang, W.; Zheng, J.; Ochieng, W.Y. GNSS/INS Integration with Integrity Monitoring for UAV No-fly Zone Management. Remote Sens. 2020, 12, 524. [Google Scholar] [CrossRef]
- Xiao, J.; Li, Y.; Zhang, C.; Zhang, Z. INS/GPS Integrated Navigation for Unmanned Ships Based on EEMD Noise Reduction and SSA-ELM. J. Mar. Sci. Eng. 2022, 10, 1733. [Google Scholar] [CrossRef]
- Jiang, H.; Shi, C.; Li, T.; Dong, Y.; Li, Y.; Jing, G. Low-cost GPS/INS integration with accurate measurement modeling using an extended state observer. GPS Solut. 2020, 25, 17. [Google Scholar] [CrossRef]
- Li, D.; Jia, X.; Zhao, J. A Novel Hybrid Fusion Algorithm for Low-Cost GPS/INS Integrated Navigation System During GPS Outages. IEEE Access 2020, 8, 53984–53996. [Google Scholar] [CrossRef]
- Zhao, Y.; Bi, S.; Zhang, H.; Chen, Z. Dynamic Weight and Mapping Mutation Operation-Based Salp Swarm Algorithm for Global Optimization. Appl. Sci. 2023, 13, 8960. [Google Scholar] [CrossRef]
- Bai, Y.B.; Holden, L.; Kealy, A.; Zaminpardaz, S.; Choy, S. A hybrid indoor/outdoor detection approach for smartphone-based seamless positioning. J. Navig. 2022, 75, 4946–4965. [Google Scholar] [CrossRef]
- Baştemur Kaya, C. A Novel Hybrid Method Based on the Marine Predators Algorithm and Adaptive Neuro-Fuzzy Inference System for the Identification of Nonlinear Systems. Symmetry 2023, 15, 1765. [Google Scholar] [CrossRef]
- Garg, V.; Deep, K.; Alnowibet, K.A.; Zawbaa, H.M.; Mohamed, A.W. Biogeography Based optimization with Salp Swarm optimizer inspired operator for solving non-linear continuous optimization problems. Alex. Eng. J. 2023, 73, 321–341. [Google Scholar] [CrossRef]
- Shi, D.; Chu, F.; Cai, Q.; Wang, Z.; Lv, Z.; Wang, J. Research on a Path Tracking Control Strategy for Autonomous Vehicles Based on State Parameter Identification. World Electr. Veh. J. 2024, 15, 295. [Google Scholar] [CrossRef]
- Zhao, T.; Wang, C.; Shen, C. Seamless MEMS-INS/Geomagnetic Navigation System Based on Deep-Learning Strong Tracking Square-Root Cubature Kalman Filter. Micromachines 2023, 14, 1935. [Google Scholar] [CrossRef]
- Yang, J.L.; Ji, H.B.; Liu, J.M. A Maneuvering Target Tracking Algorithm Based on Gaussian Filter for Multiple Passive Sensors. Key Eng. Mater. 2011, 467–469, 447–452. [Google Scholar] [CrossRef]
- Wainwright, M.; Jordan, M.I. Graphical models, exponential families, and variational inference. Found. Trends Mach. Learn. 2008, 1, 1–305. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Paisley, J.; Blei, D.; Jordan, M. Variational Bayesian inference with stochastic search. In Proceedings of the 29th International Conference on Machine Learning, Edinburgh, Scotland, 26 June 2012; pp. 1363–1370. [Google Scholar]
- Gultekin, S.; Paisley, J. Nonlinear Kalman Filtering With Divergence Minimization. IEEE Trans. Signal Process. 2017, 65, 6319–6331. [Google Scholar] [CrossRef]
- Li, S.; Qin, Z.; Song, H.; Si, C.; Sun, B.; Yang, X.; Zhang, R. A lightweight and aggregated system for indoor/outdoor detection using smart devices. Future Gener. Comp. Sy. 2020, 107, 988–997. [Google Scholar] [CrossRef]
- Ali, M.; ElBatt, T. and Youssef, M. SenseIO: Realistic Ubiquitous Indoor Outdoor Detection System Using Smartphones. IEEE Sens. J. 2018, 18, 3684–3693. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Frequency (Hz) | Measurement | Preprocess |
|---|---|---|---|
| GPS | 1 | , | GNSS outlier removal |
| Light | Unsteady | Linear interpolation | |
| Magnet | 50 | , , | / |
| Wi-Fi | 1 | / | |
| Acc | 50 | ,, | Coordinate transformation, low-pass filtering, and cubic interpolation |
| Gyro | 50 | , , | |
| Gravity | 50 | , , |
| Android Cell Phones | Indoor | Outdoor | Semi-Indoor |
|---|---|---|---|
| Xiaomi10 | 99.42% | 100% | 91.67% |
| Honor any00 | 99.71% | 99.41% | 92.85% |
| Xiaomi13 | 99.41% | 99.42% | 92.31% |
| IOD Approach | Sensors Used for Detection | Indoor | Outdoor | Semi-Indoor | Complexities |
|---|---|---|---|---|---|
| [19] | Magnetometer | 85.3% | 85.3% | 85.3% | Medium |
| [37] | Wi-Fi | 96.8% | 92.5% | 90% | Low |
| [18] | Light, magnetometer, cellular | 90% | 92% | 92% | High |
| [38] | Light, Wi-Fi, cellular, clocks, etc. | 92.6% | 93.74% | 87.55% | Low |
| Proposed | Light, magnetometer, GPS, cellular | 99.41% | 99.42% | 92.31% | Medium |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Dong, X.; Lu, X.; Lu, J.; Xue, J.; Du, J. Salp Swarm Algorithm-Based Kalman Filter for Seamless Multi-Source Fusion Positioning with Global Positioning System/Inertial Navigation System/Smartphones. Remote Sens. 2024, 16, 3511. https://doi.org/10.3390/rs16183511
Wang J, Dong X, Lu X, Lu J, Xue J, Du J. Salp Swarm Algorithm-Based Kalman Filter for Seamless Multi-Source Fusion Positioning with Global Positioning System/Inertial Navigation System/Smartphones. Remote Sensing. 2024; 16(18):3511. https://doi.org/10.3390/rs16183511
Chicago/Turabian StyleWang, Jin, Xiyi Dong, Xiaochun Lu, Jin Lu, Jian Xue, and Jianbo Du. 2024. "Salp Swarm Algorithm-Based Kalman Filter for Seamless Multi-Source Fusion Positioning with Global Positioning System/Inertial Navigation System/Smartphones" Remote Sensing 16, no. 18: 3511. https://doi.org/10.3390/rs16183511
APA StyleWang, J., Dong, X., Lu, X., Lu, J., Xue, J., & Du, J. (2024). Salp Swarm Algorithm-Based Kalman Filter for Seamless Multi-Source Fusion Positioning with Global Positioning System/Inertial Navigation System/Smartphones. Remote Sensing, 16(18), 3511. https://doi.org/10.3390/rs16183511