
Robust Direction Estimation of Terrestrial Signal via Sparse Non-Uniform Array Reconfiguration under Perturbations



Abstract
1. Introduction
- Derivation of reconstruction parameters for ULA with perturbations: We derive the CRB and SCC for ULA under perturbed conditions, which are crucial indicators for array reconstruction. Additionally, we simplify these indicators and obtain generalized expressions.
- Construction and solution of the reconstruction model: Based on the simplified indicators, we formulate the reconstruction model as a higher-order 0–1 optimization problem. After that, we propose the TABI algorithm to solve this non-convex model. By analyzing the convergence of the TABI, we prove its ability to obtain the optimal approximate solution.
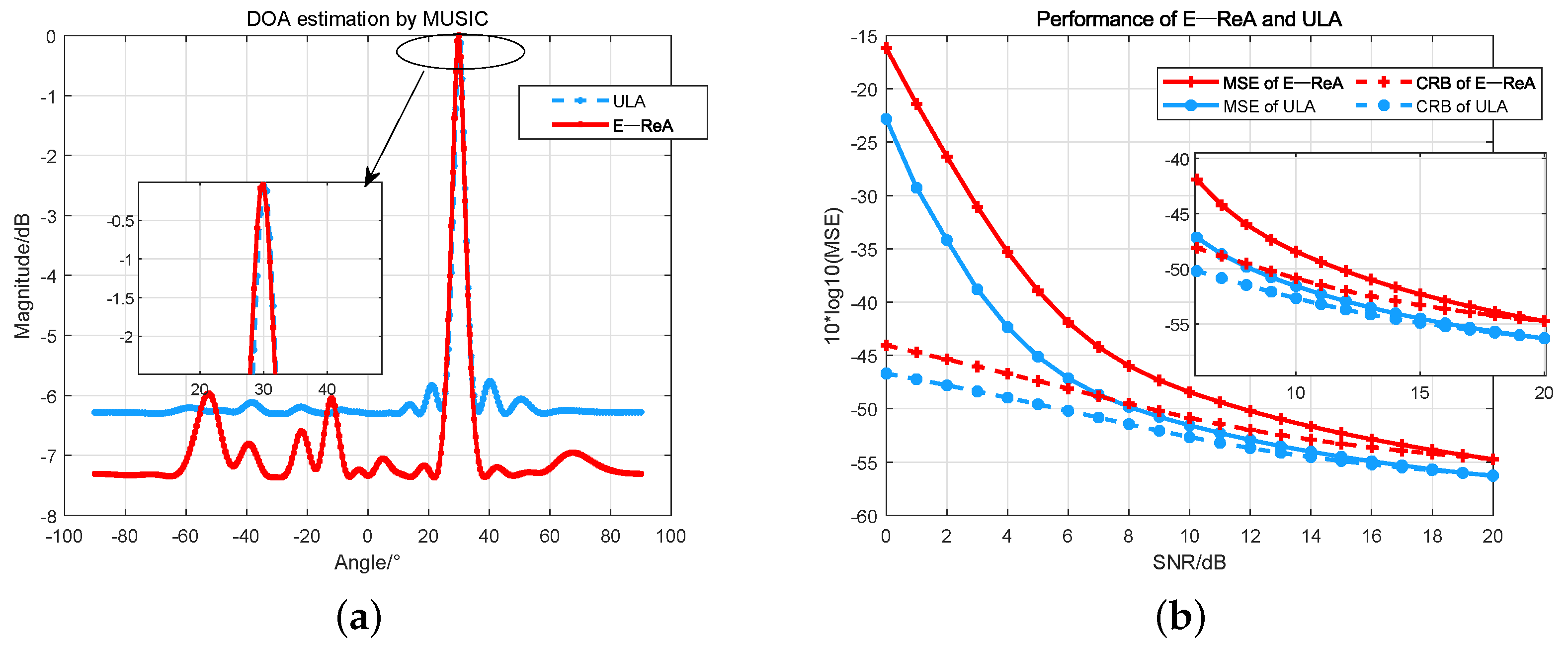
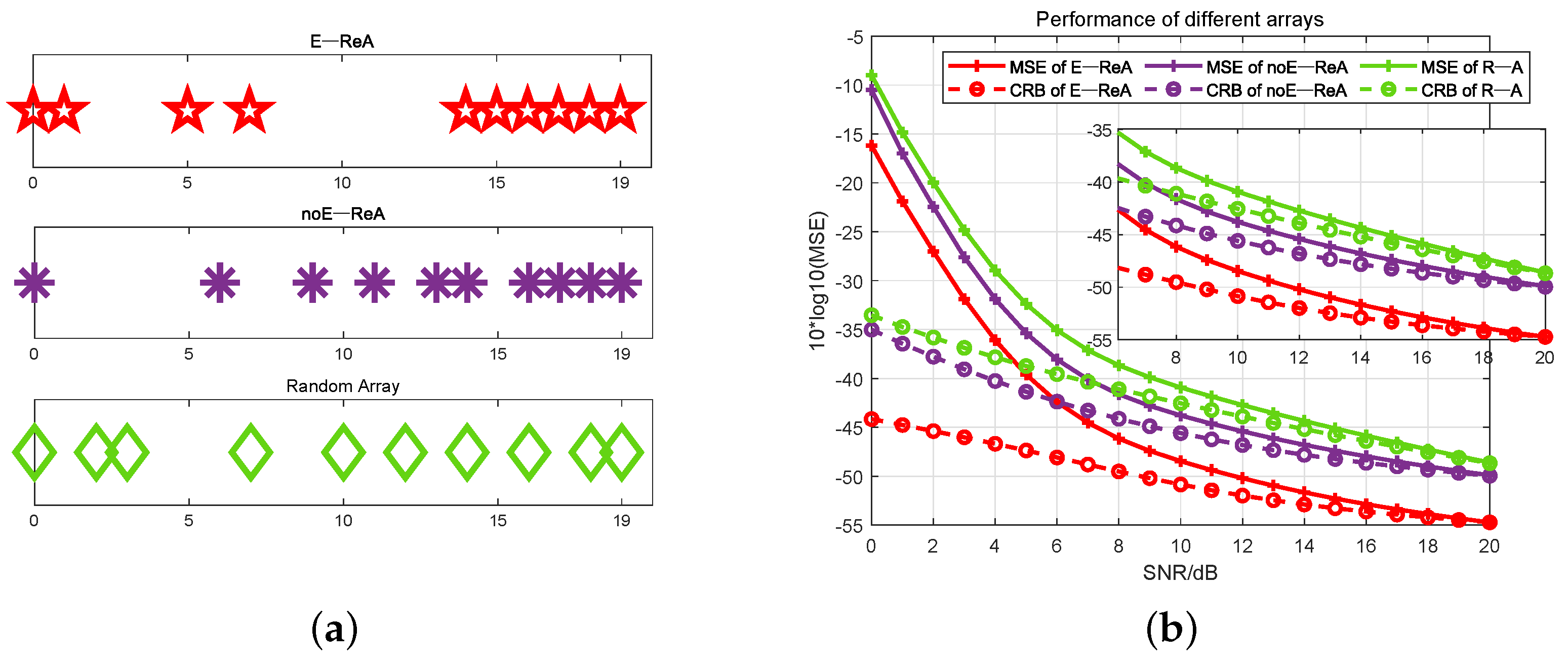
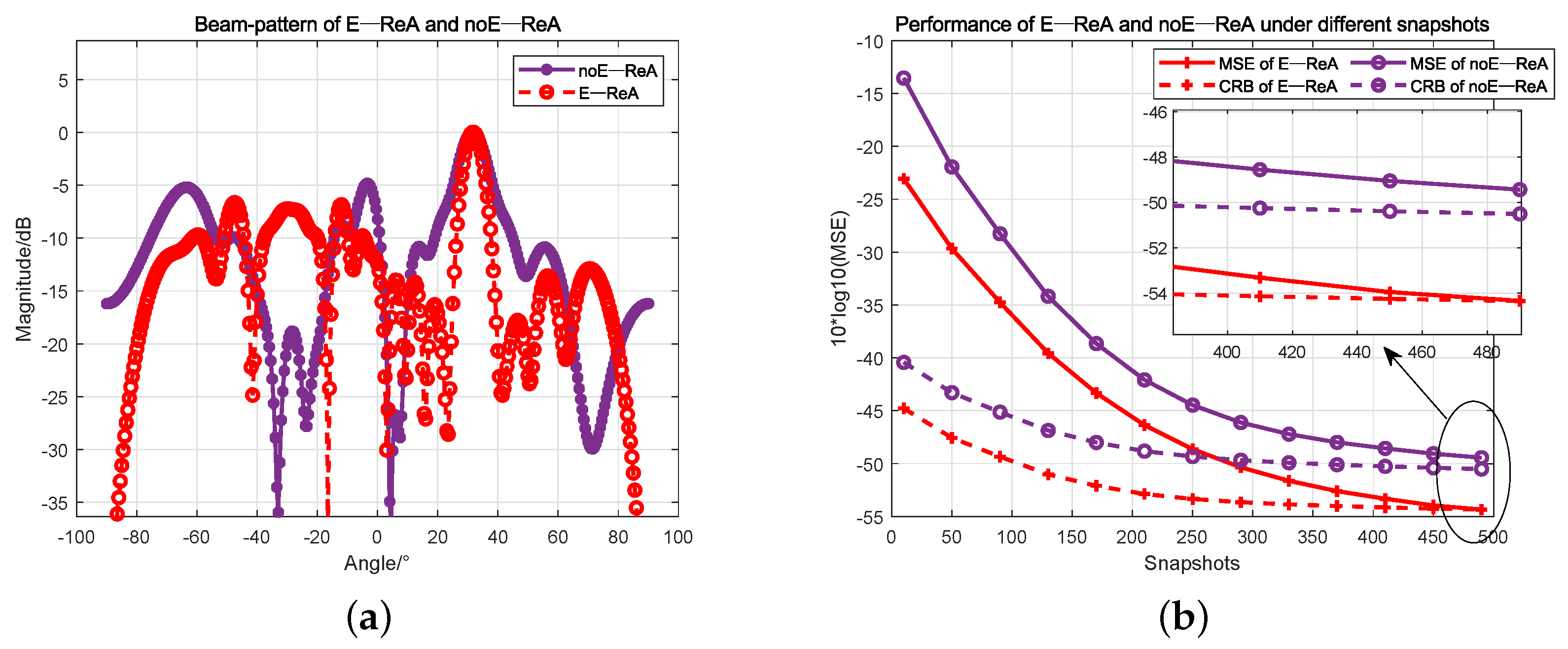
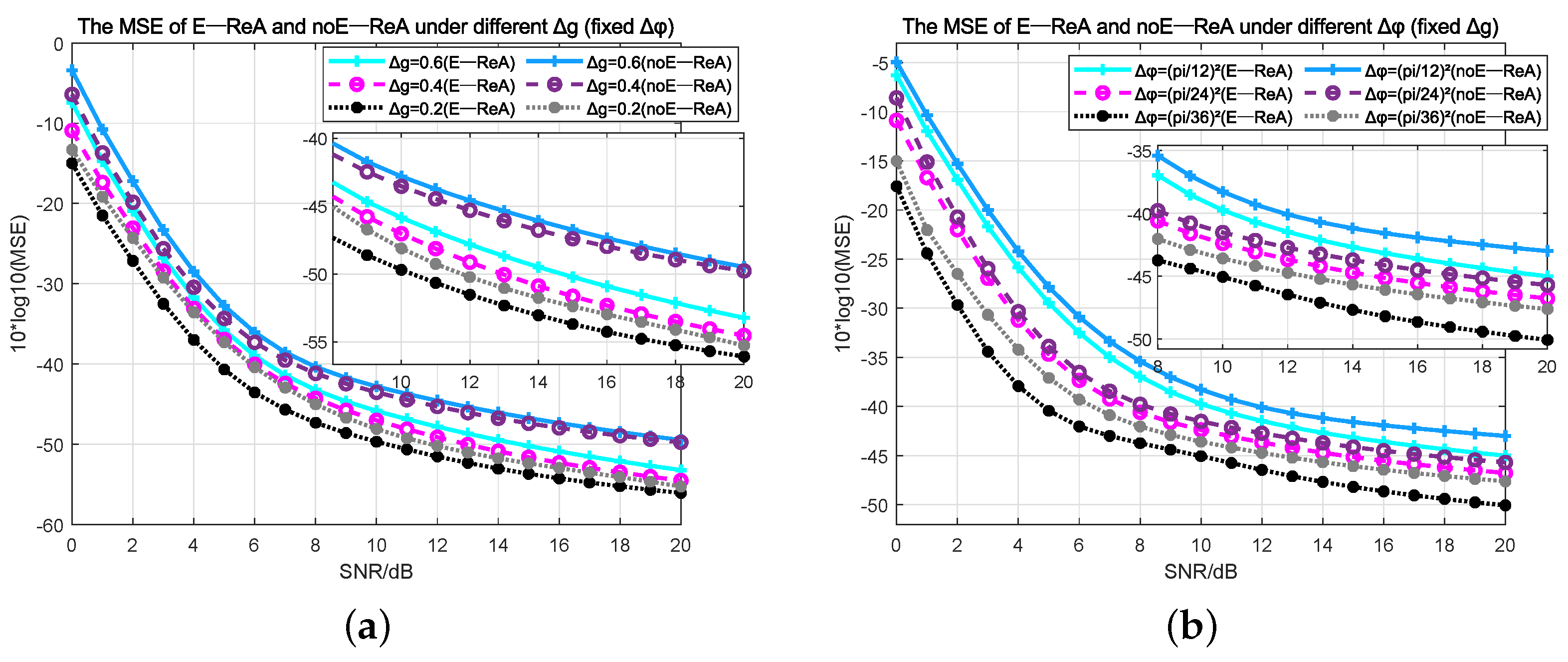
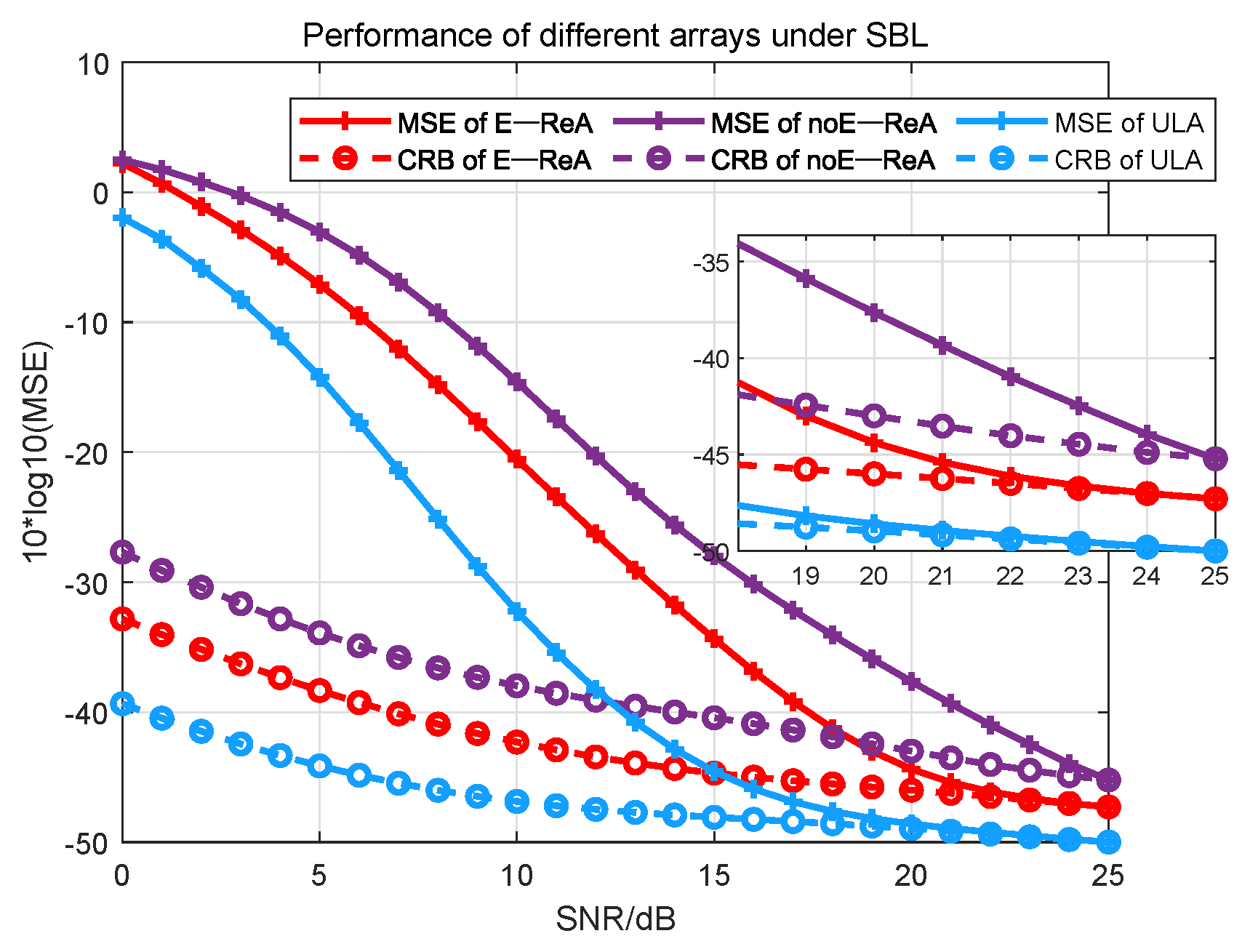
- Validation through experiments: The performances of three arrays, E-ReA, noE-ReA, and ULA, are compared. In DOA estimation performance, E-ReA outperforms noE-ReA by 3dB to 5dB. In the comparative experiments with different perturbation errors, the robustness of E-ReA is evidenced. Furthermore, the adaptability of E-ReA to various DOA estimation methods is also be illustrated. The experiments indicate that the array reconstructed using the TABI algorithm is highly suitable for estimating the direction of terrestrial SOP.
- . Transpose.
- . Hermitian (complex conjugate) transpose.
- . Take the real part of the elements in matrix .
- . Indicates the diagonal matrix with corresponding elements on its diagonal.
- . Signifies the arrangement of individual submatrices in a block diagonal form.
- . Means taking the trace of matrix.
- . The inverse matrix of .
- . The element in i-th row and j-th column of .
- . Column vector.
- . Identity matrix.
- ⊙. Hadamard product.
- ⊗. Kronecker product.
- . means matrix vectorization.
- . The first derivative of with respect to .
2. Problem Formulation and Analysis
2.1. Signal Model
2.2. Indicators for Array Reconstruction under Perturbation Errors
2.2.1. CRB
2.2.2. SCC
2.2.3. Reconstruction Model of ULA with Perturbation Errors
3. Solution of Reconstruction Model
- Step 1:
- Based on Equation (32), compute the initial value and set the threshold .
- Step 2:
- Step 3:
- Compute the minimum value of (27) using and denote it as .
- Step 4:
- If and , output the solution and exit; otherwise, assign and return to Step 2 for iteration.
4. Numerical Simulations
4.1. Comparison of E-ReA and ULA
4.2. Comparison of Sparse Arrays
4.3. Investigation of Robustness
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Morton, Y.; Diggelen, F.; Spilker, J.; Parkinson, B.; Lo, S.; Gao, G. Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; John Wiley and Sons: Hoboken, NJ, USA, 2021; Volume 1. [Google Scholar]
- Psiaki, M.; Slosman, B. Tracking digital FM OFDM signals for the determination of navigation observables. NAVIGATION J. Inst. Navig. 2022, 69, navi.521. [Google Scholar] [CrossRef]
- Yang, C.; Soloviev, A. Mobile positioning with signals of opportunity in urban and urban canyon environments. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1043–1059. [Google Scholar]
- Neinavaie, M.; Khalife, J.; Kassas, Z.M. Cognitive opportunistic navigation in private networks with 5G signals and beyond. IEEE J. Sel. Top. Signal Process. 2021, 16, 129–143. [Google Scholar] [CrossRef]
- Abdallah, A.A.; Kassas, Z.M. UAV navigation with 5G carrier phase measurements. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), Online, 20–24 September 2021; pp. 3294–3306. [Google Scholar]
- Nguyen, A.A.; Shadram, Z.; Kassas, Z.M. A lower bound for the error covariance of radio SLAM with terrestrial signals of opportunity. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), Online, 20–24 September 2021; pp. 2294–2306. [Google Scholar]
- Yin, J.; Wan, Q.; Yang, S.; Ho, K. A simple and accurate TDOA-AOA localization method using two stations. IEEE Signal Process. Lett. 2015, 23, 144–148. [Google Scholar] [CrossRef]
- Yue, Z.; Gao, F.; Xiong, Q.; Wang, J.; Huang, T.; Yang, E.; Zhou, H. A Novel Semi-Supervised Convolutional Neural Network Method for Synthetic Aperture Radar Image Recognition. Cogn. Comput. 2021, 4, 795–806. [Google Scholar] [CrossRef]
- Gao, F.; Kong, L.Z.; Lang, R.L.; Sun, J.P.; Wang, J.; Hussain, A.; Zhou, H.Y. SAR Target Incremental Recognition Based on Features with Strong Separability. IEEE Trans. Geosci. Remote Sens. 2024, 63, 5202813. [Google Scholar] [CrossRef]
- Huang, H.; Gao, F.; Sun, J.; Wang, J.; Hussain, A.; Zhou, H. Novel Category Discovery without Forgetting for Automatic Target Recognition. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 4408–4420. [Google Scholar] [CrossRef]
- Xu, L.; Wen, F.; Zhang, X. A Novel Unitary PARAFAC Algorithm for Joint DOA and Frequency Estimation. IEEE Commun. Lett. 2019, 23, 660–663. [Google Scholar] [CrossRef]
- Wu, X.; Yang, X.; Jia, X.; Tian, F. A Gridless DOA Estimation Method Based on Convolutional Neural Network with Toeplitz Prior. IEEE Signal Process. Lett. 2022, 29, 1247–1251. [Google Scholar] [CrossRef]
- Fan, R.; Si, C.; Yi, W.; Wan, Q. YOLO-DoA: A New Data-Driven Method of DoA Estimation Based on YOLO Neural Network Framework. IEEE Sens. Lett. 2023, 7, 7000604. [Google Scholar] [CrossRef]
- Li, B.; Zhang, X.; Li, J.; Ma, P. DOA Estimation of Non-Circular Source for Large Uniform Linear Array with a Single Snapshot: Extended DFT Method. IEEE Commun. Lett. 2021, 25, 3843–3847. [Google Scholar] [CrossRef]
- Tian, Q.; Cai, R. A Low-Complexity DOA Estimation Algorithm for Distributed Source Localization. IEEE Trans. Instrum. Meas. 2023, 72, 1–4. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.; Zheng, B.; Wang, X. Efficient DOA estimation method for reconfigurable intelligent surfaces aided UAV swarm. IEEE Trans. Signal Process. 2022, 70, 743–755. [Google Scholar] [CrossRef]
- Barthelme, A.; Utschick, W. DoA estimation using neural network-based covariance matrix reconstruction. IEEE Signal Process. Lett. 2021, 28, 783–787. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, W.Q.; Kong, Y.; Zhang, Y.D. MISC array: A new sparse array design achieving increased degrees of freedom and reduced mutual coupling effect. IEEE Trans. Signal Process. 2019, 67, 1728–1741. [Google Scholar] [CrossRef]
- Bao, Y.; Zhang, H.; Liu, X.; Jiang, Y.; Tao, Y. Design of Robust Sparse Wideband Beamformers with Circular-Model Mismatches Based on Reweighted l2,1 Optimization. Remote Sens. 2023, 15, 4791. [Google Scholar] [CrossRef]
- Wu, Z.; Zhu, S.; Xu, J.; Lan, L.; Li, X.; Zhang, Y. Frequency Increment Design Method of MR-FDA-MIMO Radar for Interference Suppression. Remote Sens. 2023, 15, 4070. [Google Scholar] [CrossRef]
- Li, H.; Ran, L.; He, C.; Ding, Z.; Chen, S. Adaptive Beamforming with Sidelobe Level Control for Multiband Sparse Linear Array. Remote Sens. 2023, 15, 4929. [Google Scholar] [CrossRef]
- Robin, R.; Visa, K. Sparse Symmetric Linear Arrays with Low Redundancy and a Contiguous Sum Co-Array. IEEE Trans. Signal Process. 2021, 69, 1697–1712. [Google Scholar]
- Steven, W.; Koichi, I. xMISC: Improved Sparse Linear Array via Maximum Inter-Element Spacing Concept. IEEE Signal Process. Lett. 2023, 30, 1327–1331. [Google Scholar]
- Wang, M.; Zhang, Z.; Nehorai, A. Performance Analysis of Coarray-Based MUSIC in the Presence of Sensor Location Errors. IEEE Trans. Signal Process. 2018, 66, 3074–3085. [Google Scholar] [CrossRef]
- Steven, W.; Koichi, I. A Sum-Difference Expansion Scheme for Sparse Array Construction Based on the Fourth-Order Difference Co-Array. IEEE Signal Process. Lett. 2022, 29, 2647–2651. [Google Scholar]
- Steven, W.; Koichi, I. Hybridization of Bayesian Compressive Sensing and Array Dilation Technique for Synthesis of Linear Isophoric Sparse Antenna Arrays. IEEE Trans. Antennas Propag. 2023, 71, 4066–4074. [Google Scholar]
- Geng, L.; Li, Y.; Dong, L.; Tan, Y.; Cheng, W. Efficiently Refining Beampattern in FDA-MIMO Radar via Alternating Manifold Optimization for Maximizing Signal-to-Interference-Noise Ratio. Remote Sens. 2024, 16, 1364. [Google Scholar] [CrossRef]
- Dai, Y.; Sun, C.; Liu, X. On the 2D Beampattern Optimization of Sparse Group-Constrained Robust Capon Beamforming with Conformal Arrays. Remote Sens. 2024, 16, 421. [Google Scholar] [CrossRef]
- Han, B.; Qu, X.; Yang, X.; Zhang, Z.; Li, W. DRFM Repeater Jamming Suppression Method Based on Joint Range-Angle Sparse Recovery and Beamforming for Distributed Array Radar. Remote Sens. 2023, 15, 3449. [Google Scholar] [CrossRef]
- Sahmoudi, M.; Amin, M.G. Optimal robust beamforming for interference and multipath mitigation in GNSS arrays. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing-ICASSP’07, Honolulu, HI, USA, 16–20 April 2007; Volume 3, p. 693. [Google Scholar]
- Steven, W.; Koichi, I. Sparse Array Design for DOA Estimation of Non-Circular Signals: Reduced Co-Array Redundancy and Increased DOF. IEEE Sens. J. 2021, 21, 27928–27937. [Google Scholar]
- Li, S.; Zhang, X.P. Dilated Arrays: A Family of Sparse Arrays with Increased Uniform Degrees of Freedom and Reduced Mutual Coupling on a Moving Platform. IEEE Trans. Signal Process. 2021, 69, 3367–3382. [Google Scholar] [CrossRef]
- Yang, Z.; Shen, Q.; Liu, W.; Eldar, Y.C.; Cui, W. High-Order Cumulants Based Sparse Array Design Via Fractal Geometries—Part I: Structures and DOFs. IEEE Trans. Signal Process. 2023, 71, 327–342. [Google Scholar] [CrossRef]
- Gazzah, H.; Abed-Meraim, K. Optimum ambiguity-free directional and omnidirectional planar antenna arrays for DOA estimation. IEEE Trans. Signal Process. 2009, 57, 3942–3953. [Google Scholar] [CrossRef]
- Fu, M.; Zheng, Z.; Wang, W.Q. 2-D DOA Estimation for Nested Conformal Arrays via Sparse Reconstruction. IEEE Commun. Lett. 2021, 3, 980–984. [Google Scholar] [CrossRef]
- Aboumahmoud, I.; Muqaibel, A.; Alhassoun, M.; Alawsh, S. A Review of Sparse Sensor Arrays for Two-Dimensional Direction-of-Arrival Estimation. IEEE Access 2021, 9, 92999–93017. [Google Scholar] [CrossRef]
- Gao, S.; Ma, H.; Liu, H.; Yang, J.; Yang, Y. A Gridless DOA Estimation Method for Sparse Sensor Array. Remote Sens. 2023, 15, 5281. [Google Scholar] [CrossRef]
- Weinstein, E.; Weiss, A.J. A general class of lower bounds in parameter estimation. IEEE Trans. Inf. Theory 1988, 34, 338–342. [Google Scholar] [CrossRef]
- Reuven, I.; Messer, H. A Barankin-type lower bound on the estimation error of a hybrid parameter vector. IEEE Trans. Inf. Theory 1997, 43, 1084–1093. [Google Scholar] [CrossRef]
- Routtenberg, T.; Tabrikian, J. Bayesian periodic Cramer-Rao bound. IEEE Signal Process. Lett. 2022, 29, 1878–1882. [Google Scholar] [CrossRef]
- Chaumette, E.; Galy, J.; Quinlan, A.; Larzabal, P. A new Barankin bound approximation for the prediction of the threshold region performance of maximum likelihood estimators. IEEE Trans. Signal Process. 2008, 56, 5319–5333. [Google Scholar] [CrossRef]
- Todros, K.; Tabrikian, J. General classes of performance lower bounds for parameter estimation—Part I: Non-Bayesian bounds for unbiased estimators. IEEE Trans. Inf. Theory 2010, 56, 5045–5063. [Google Scholar] [CrossRef]
- Karo, I.Y.; Dvorkind, T.G.; Cohen, I. Source localization with feedback beamforming. IEEE Trans. Signal Process. 2020, 69, 631–640. [Google Scholar] [CrossRef]
- Wang, C.; Zhu, X.; Li, X. Signal separation and target localization for FDA radar. IEEE Access 2020, 8, 180222–180230. [Google Scholar] [CrossRef]
- Yuan, G.; Vinck, H.; Kaiser, T. Massive MIMO antenna selection: Switching architectures, capacity bounds, and optimal antenna selection algorithms. IEEE Trans. Signal Process. 2017, 66, 1346–1360. [Google Scholar]
- Zhang, J.A.; Huang, X.; Guo, Y.J.; Yuan, J.; Heath, R.W. Multibeam for joint communication and radar sensing using steerable analog antenna arrays. IEEE Trans. Veh. Technol. 2018, 68, 671–685. [Google Scholar] [CrossRef]
- Wang, X.; Aboutanios, E.; Amin, M.G. Adaptive array thinning for enhanced DOA estimation. IEEE Signal Process. Lett. 2014, 22, 799–803. [Google Scholar] [CrossRef]
- Wang, X.; Greco, M.S.; Gini, F. Adaptive sparse array beamformer design by regularized complementary antenna switching. IEEE Trans. Signal Process. 2021, 69, 2302–2315. [Google Scholar] [CrossRef]
- Razaviyayn, M.; Hong, M.; Luo, Z.Q. A unified convergence analysis of block successive minimization methods for nonsmooth optimization. SIAM J. Optim. 2013, 23, 1126–1153. [Google Scholar] [CrossRef]
- Du, D.; Pardalos, P.M. Handbook of Combinatorial Optimization; Springer Science and Business Media: Berlin/Heidelberg, Germany, 1998; Volume 4. [Google Scholar]
- Ren, C.; Liu, F.; Zhou, J. MIMO radar waveform design with practical constraints: A low-complexity approach. In Proceedings of the I2018 IEEE 18th International Conference on Communication Technology (ICCT), Chongqing, China, 8–11 October 2018; pp. 94–98. [Google Scholar]
- Van, T.; Harry, L.; Bell, K.L. Excerpts from Part III of Detection, Estimation, and Modulation Theory; Wiley-IEEE Press: Hoboken, NJ, USA, 2007. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| and | The steering vector of and |
| and | The steering vector of and under perturbation |
| and | Perturbation error matrixes |
| and | Perturbation error at the k-th snapshot |
| Covariance matrix of the signal under perturbation | |
| Fisher Information Matrix (FIM) under perturbation | |
| CRB under perturbation | |
| The correlation steering vector of the k-th snapshot under perturbation | |
| SCC of sparse arrays under perturbation | |
| and | The M-dimensional selection vector, and its elements are either 0 or 1 |
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| noE-ReA | −30.05 dB | −32.14 dB | −37.78 dB | −39.75 dB | −20.98 dB |
| E-ReA | −37.86 dB | −36.02 dB | −42.43 dB | −43.19 dB | −25.59 dB |
| 6 | 7 | 8 | 9 | 10 | |
| noE-ReA | −36.57 dB | −35.08 dB | −26.36 dB | −29.14 dB | −37.68 dB |
| E-ReA | 41.27 dB | −41.18 dB | −30.17 dB | −34.05 dB | −40.04 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, R.; Xu, H.; Gao, F. Robust Direction Estimation of Terrestrial Signal via Sparse Non-Uniform Array Reconfiguration under Perturbations. Remote Sens. 2024, 16, 3482. https://doi.org/10.3390/rs16183482
Lang R, Xu H, Gao F. Robust Direction Estimation of Terrestrial Signal via Sparse Non-Uniform Array Reconfiguration under Perturbations. Remote Sensing. 2024; 16(18):3482. https://doi.org/10.3390/rs16183482
Chicago/Turabian StyleLang, Rongling, Hao Xu, and Fei Gao. 2024. "Robust Direction Estimation of Terrestrial Signal via Sparse Non-Uniform Array Reconfiguration under Perturbations" Remote Sensing 16, no. 18: 3482. https://doi.org/10.3390/rs16183482
APA StyleLang, R., Xu, H., & Gao, F. (2024). Robust Direction Estimation of Terrestrial Signal via Sparse Non-Uniform Array Reconfiguration under Perturbations. Remote Sensing, 16(18), 3482. https://doi.org/10.3390/rs16183482