
Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Areas and Period of Analysis
2.2. Surface Water Segmentation
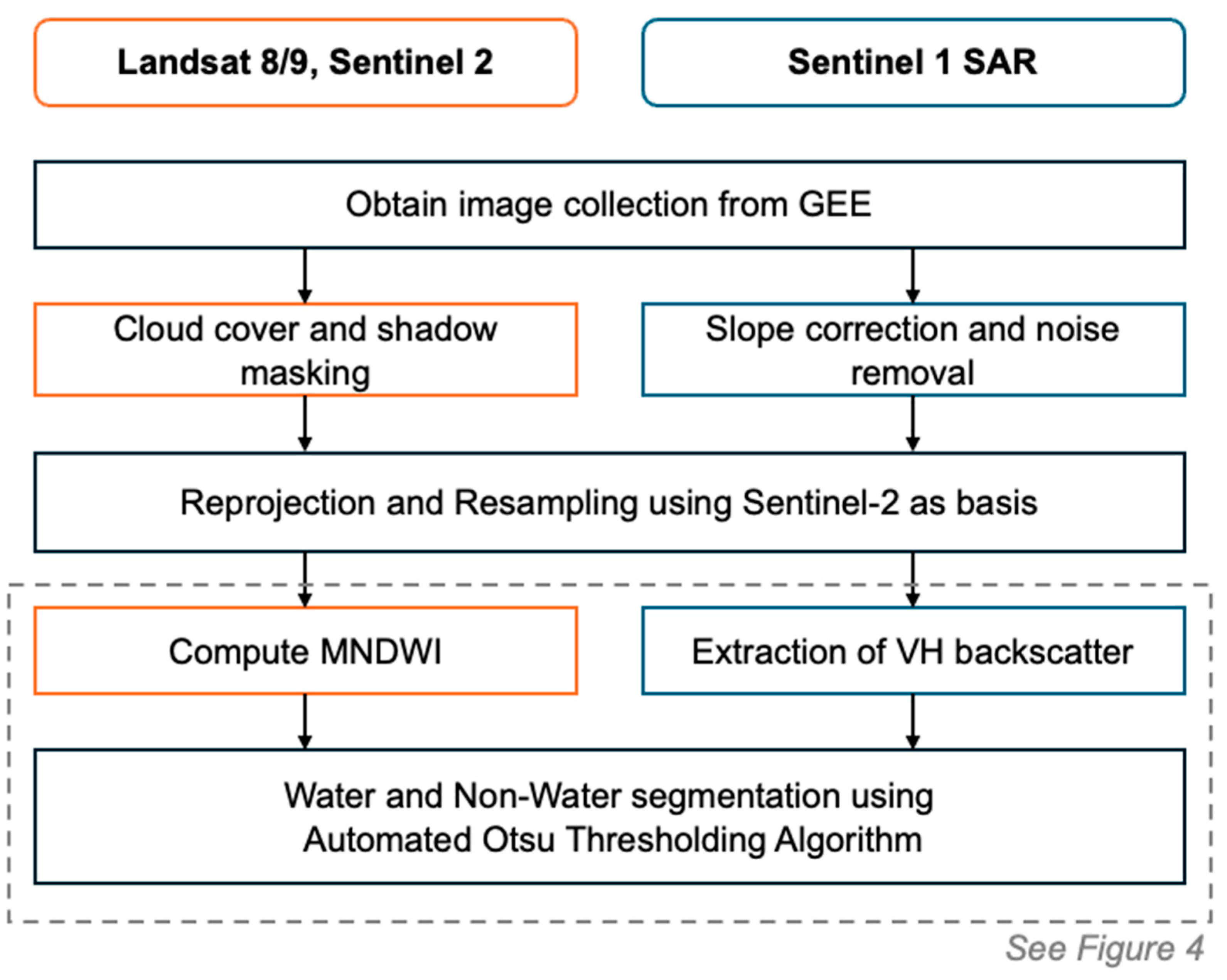
2.2.1. Satellite Data
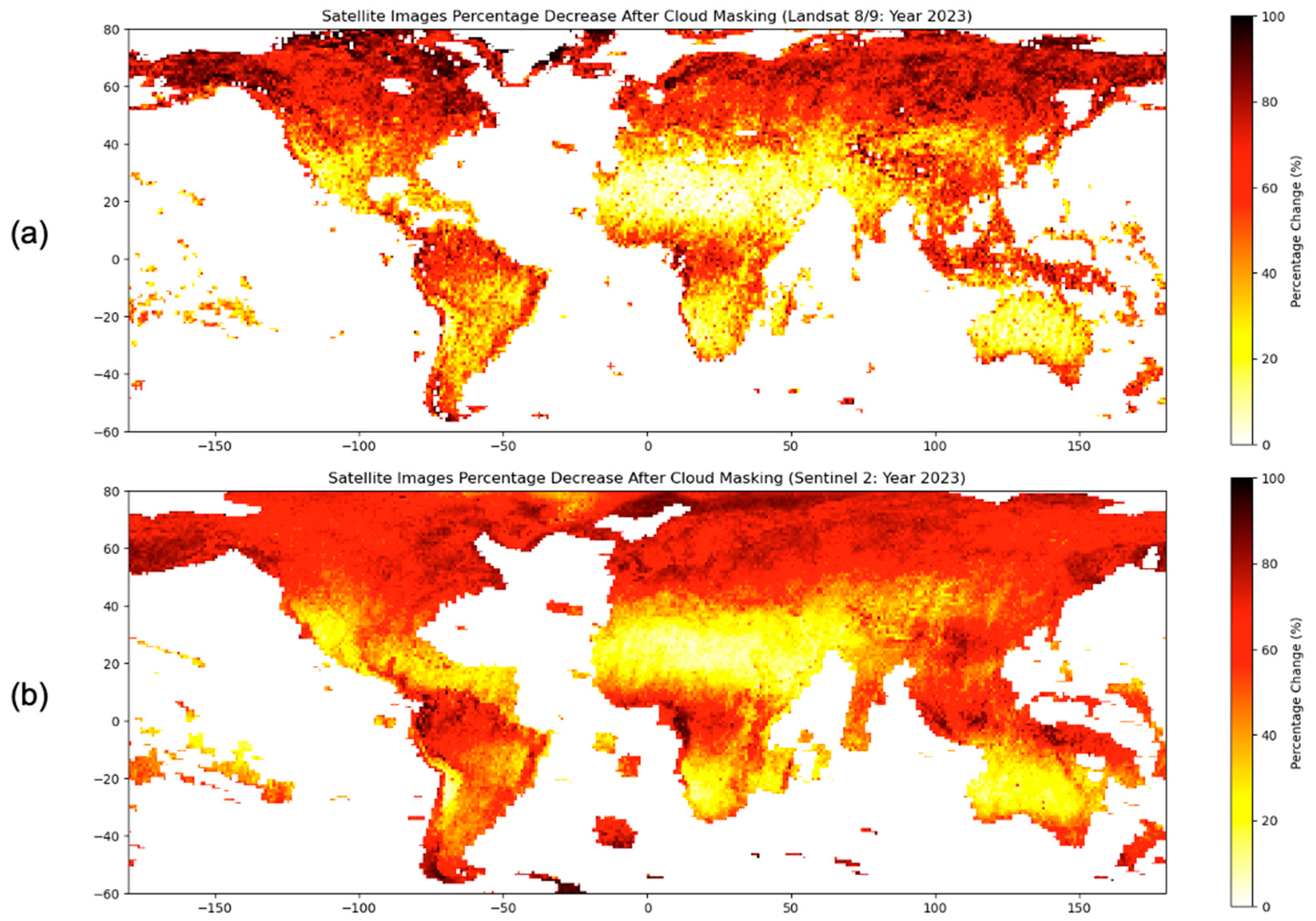
2.2.2. Cloud Cover and Cloud Shadow Masking
2.2.3. Resampling and Reprojection
2.2.4. Surface Water Indexing: MNDWI
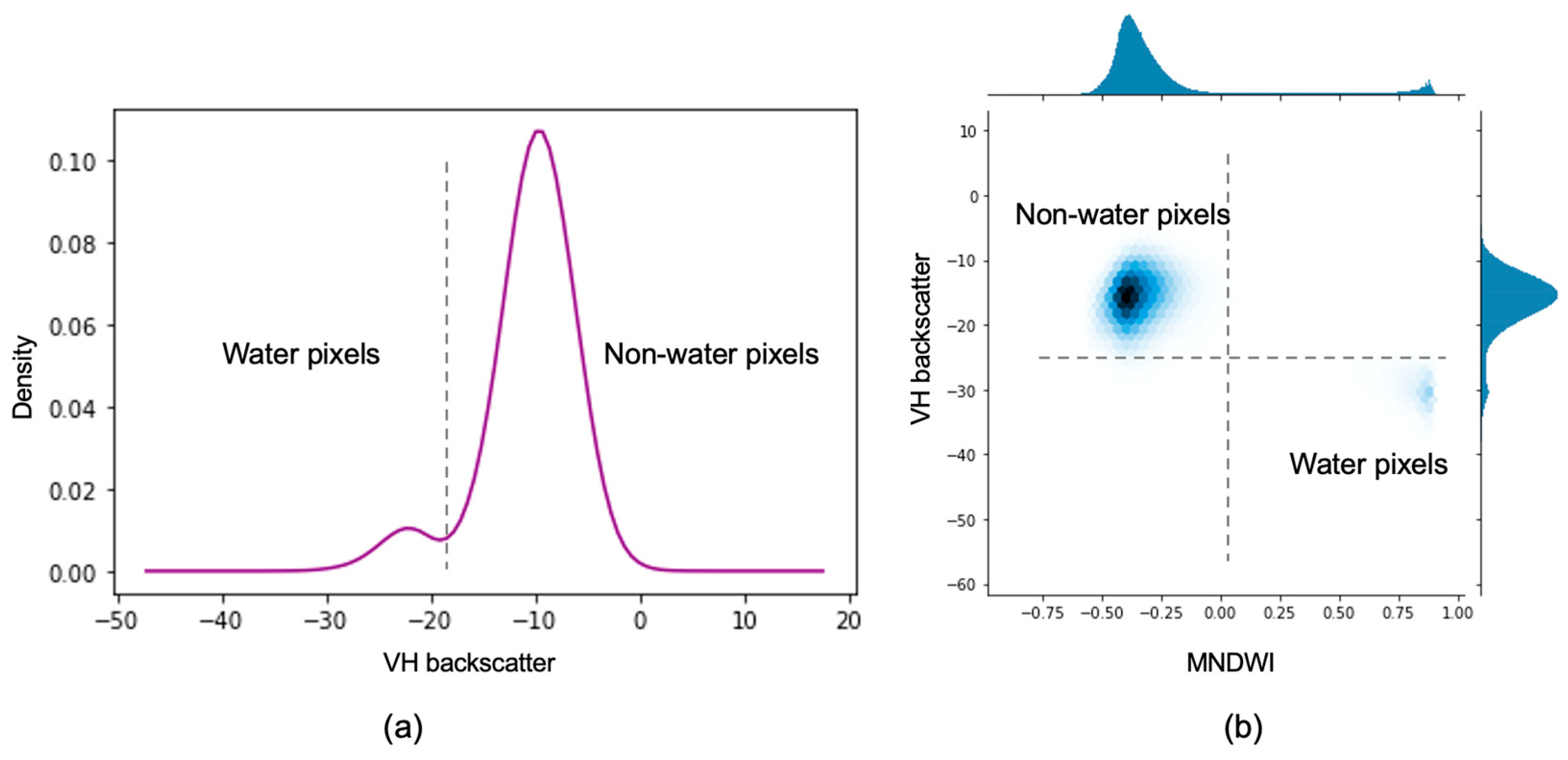
2.2.5. Image Segmentation through Automated Otsu Thresholding Algorithm
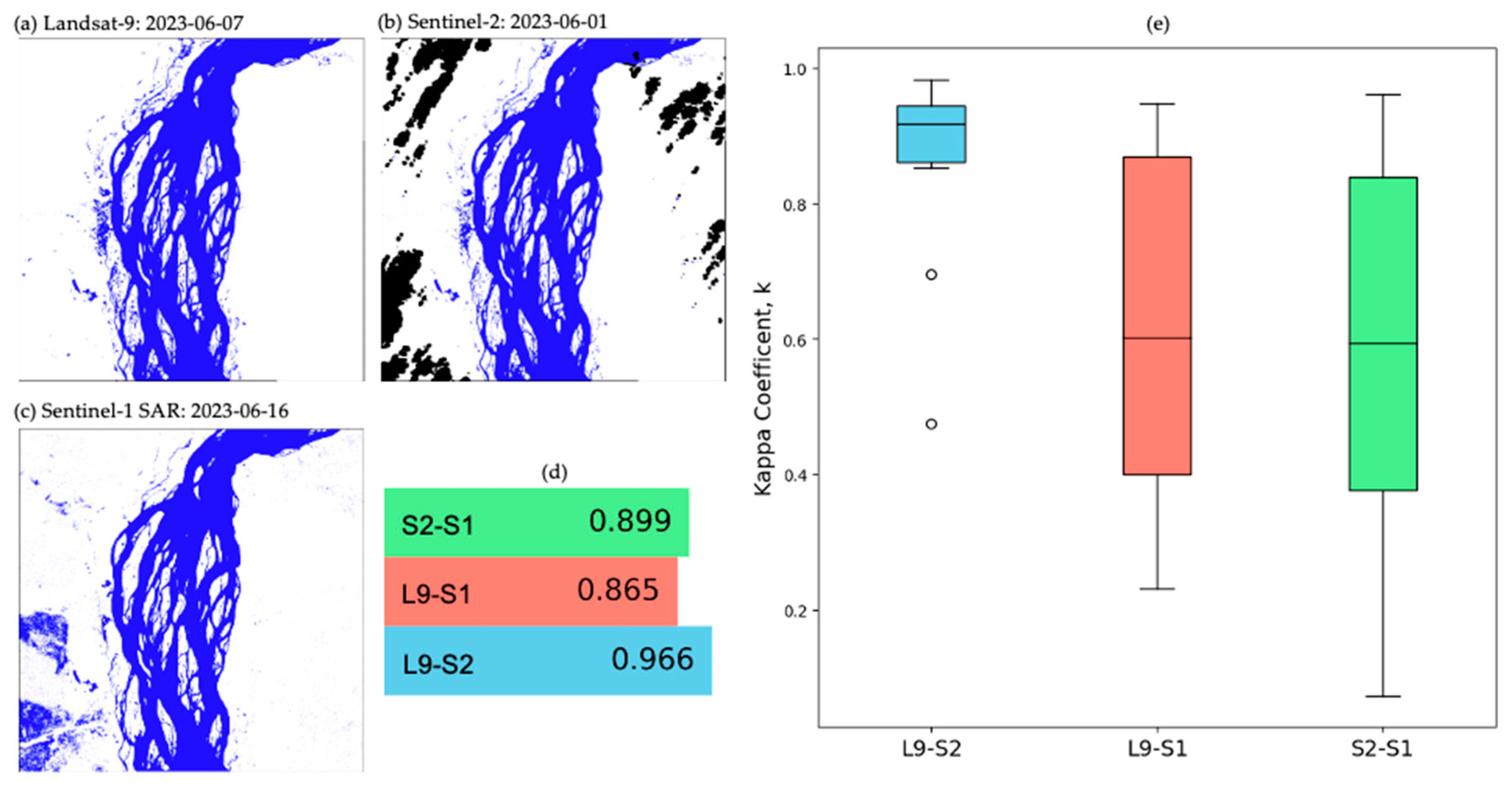
2.3. Performance Metrics: Kappa Coefficient as Degree of Harmony
3. Results and Discussion
3.1. Satellite Harmony Performance: Study Areas
3.1.1. Across the Study Areas
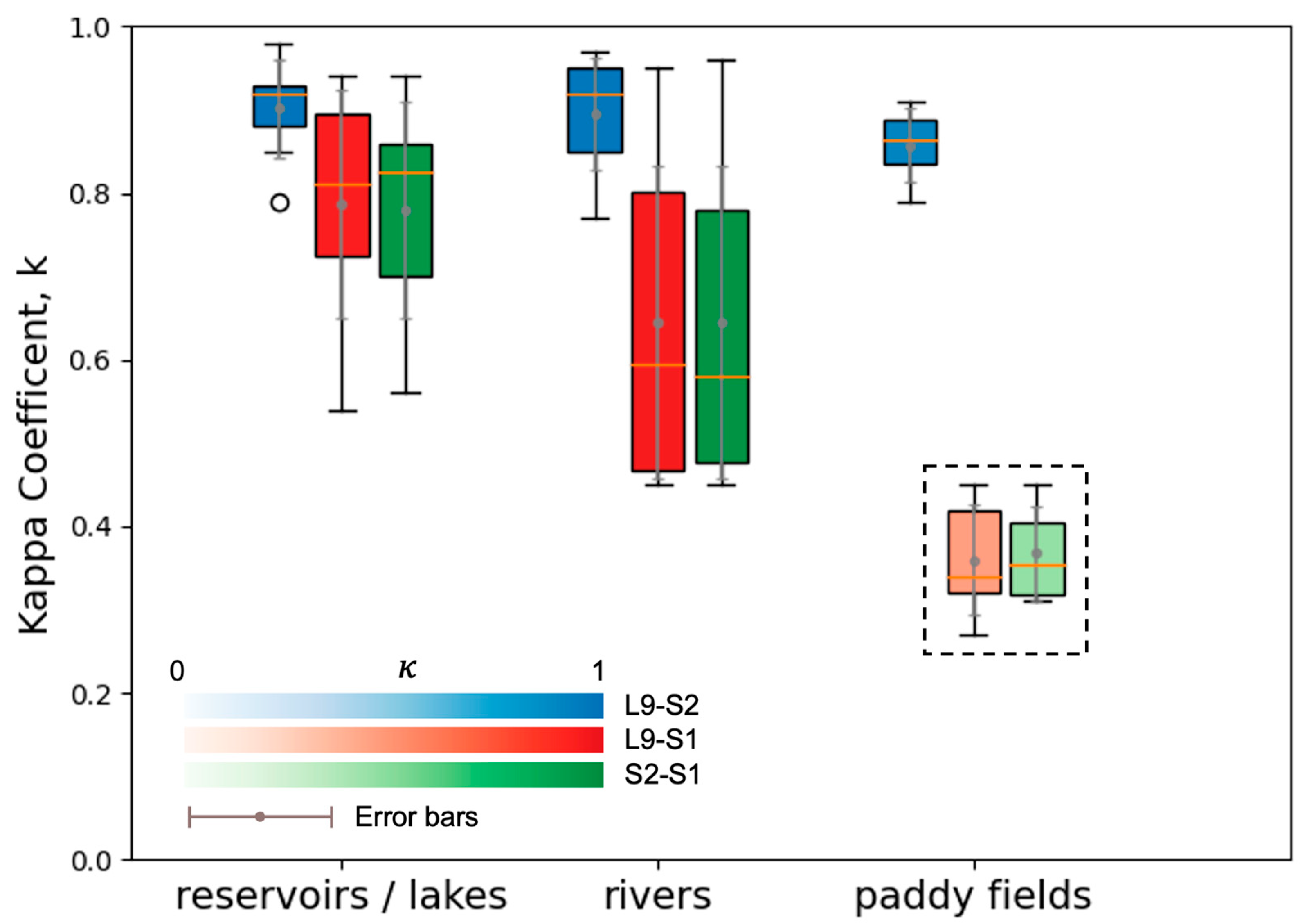
3.1.2. Across the Different Surface Water Environments
3.2. Limitations of the Automated Otsu Thresholding Algorithm: In the Presence of Vegetation
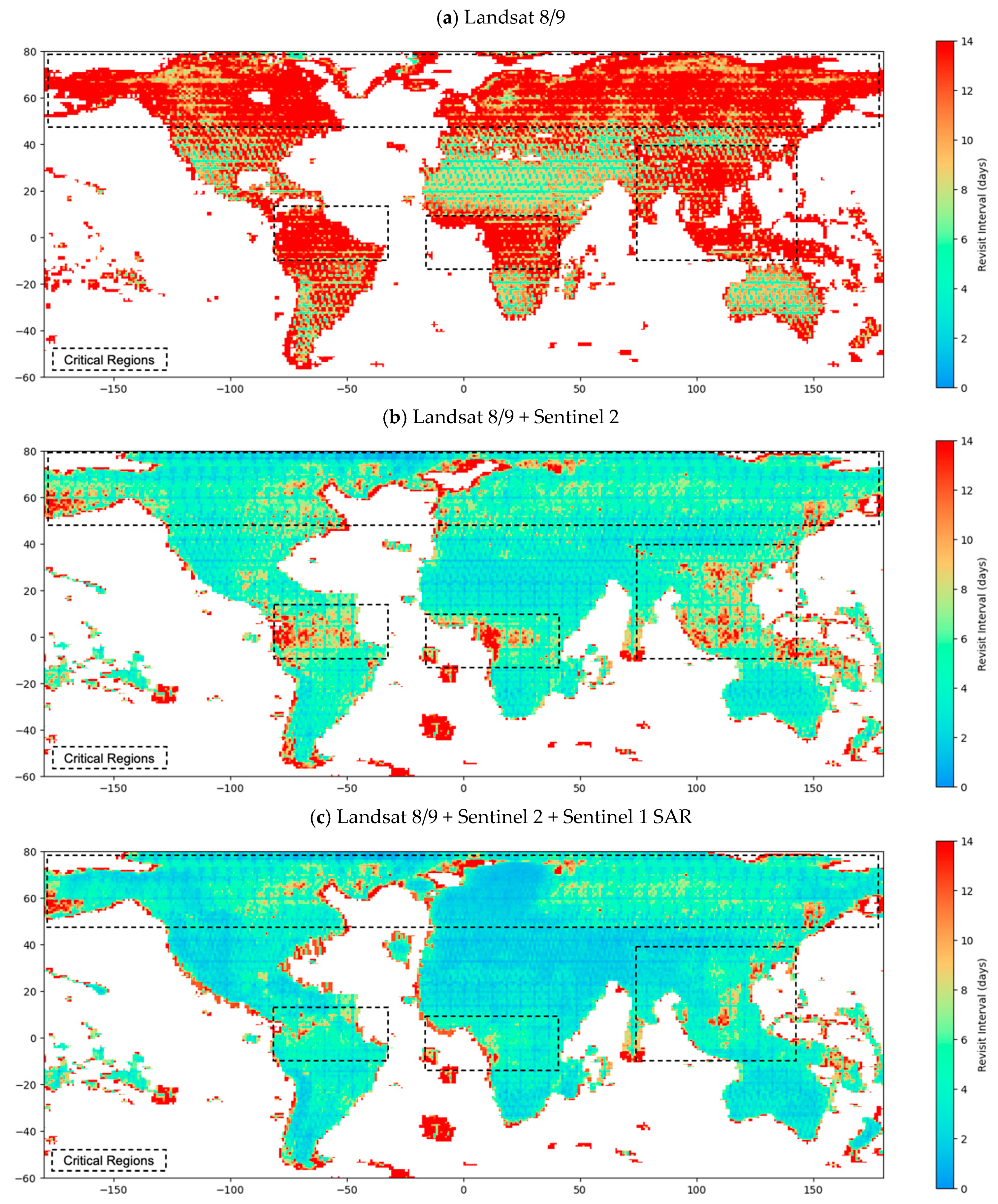
4. Global Revisit Interval
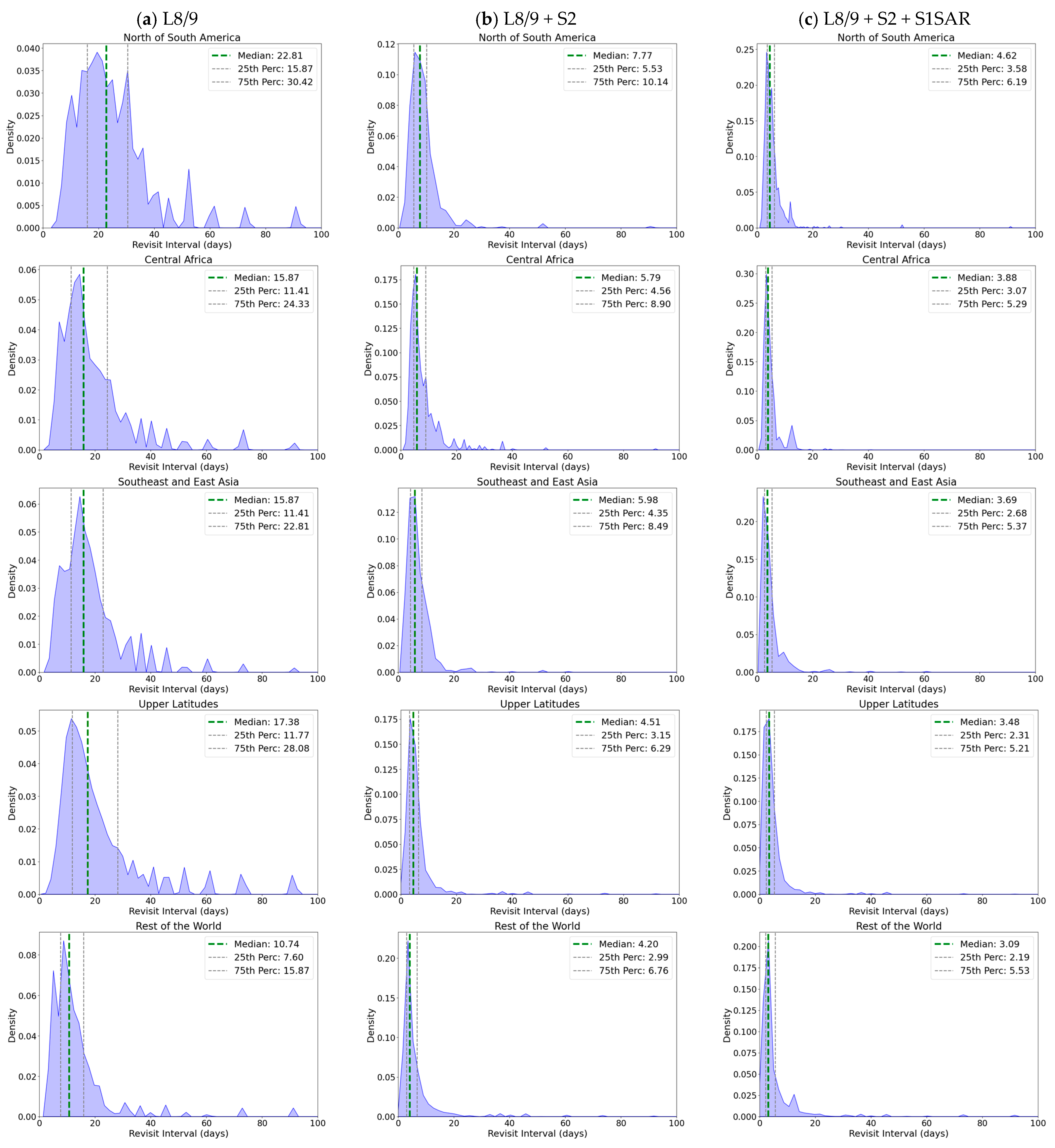
4.1. Progression after Data Fusion: Entire Year
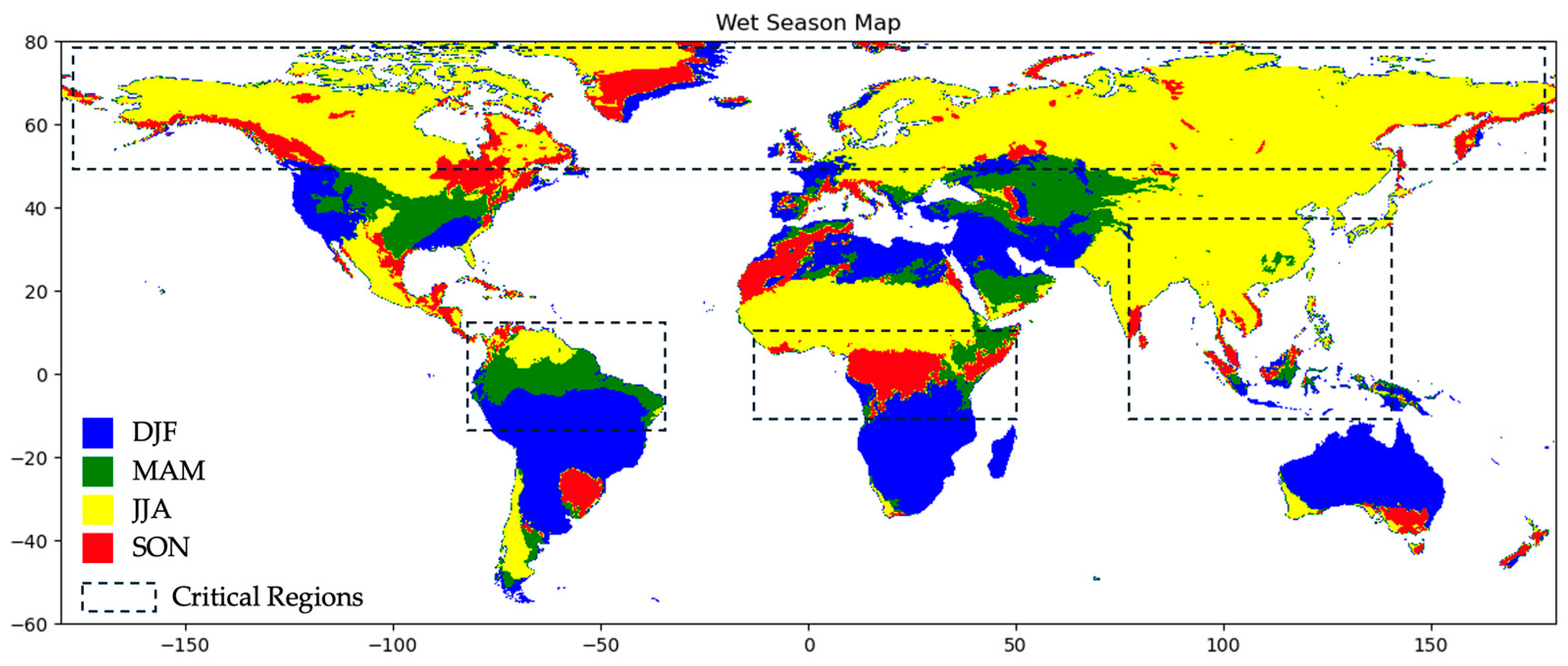
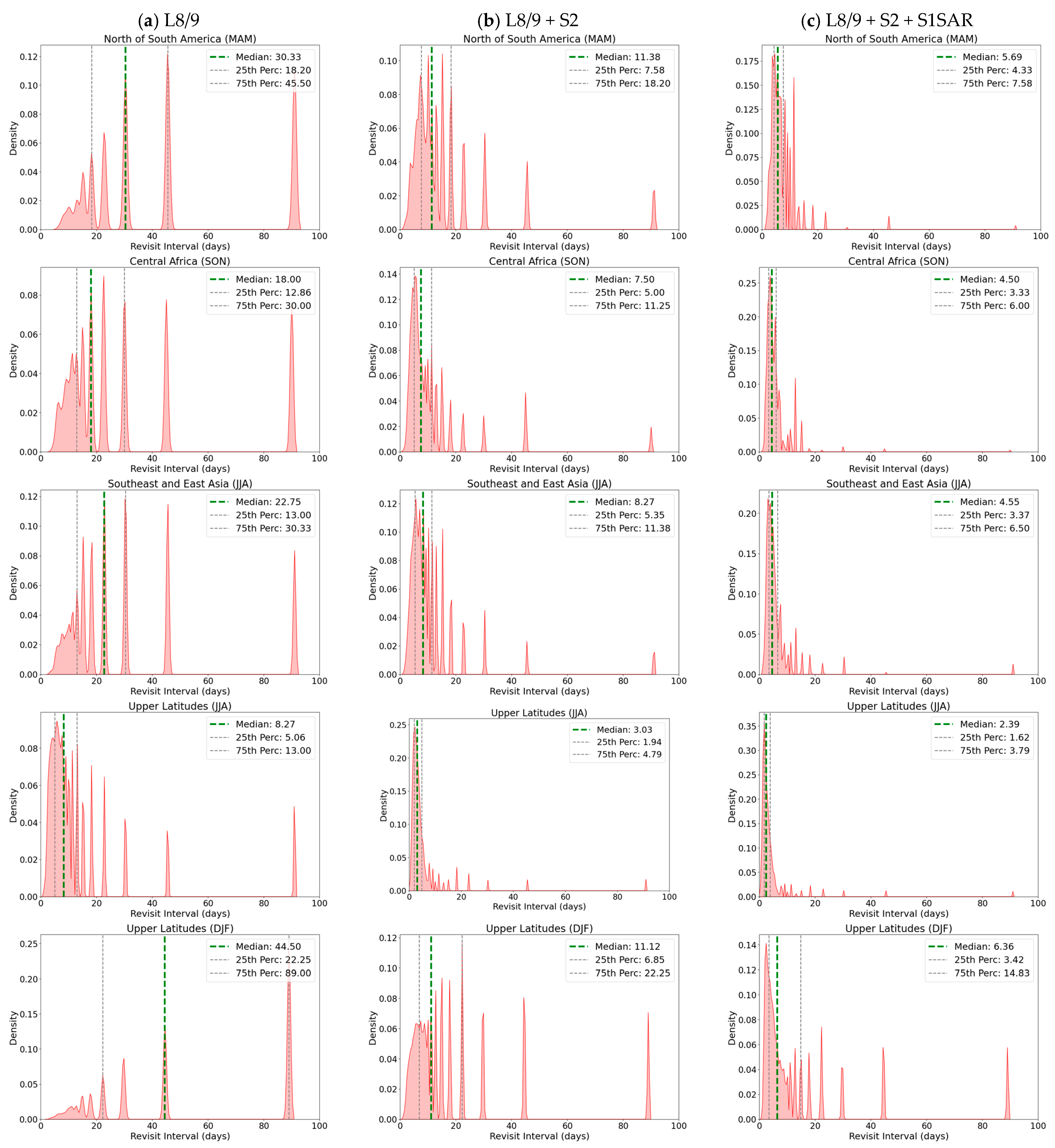
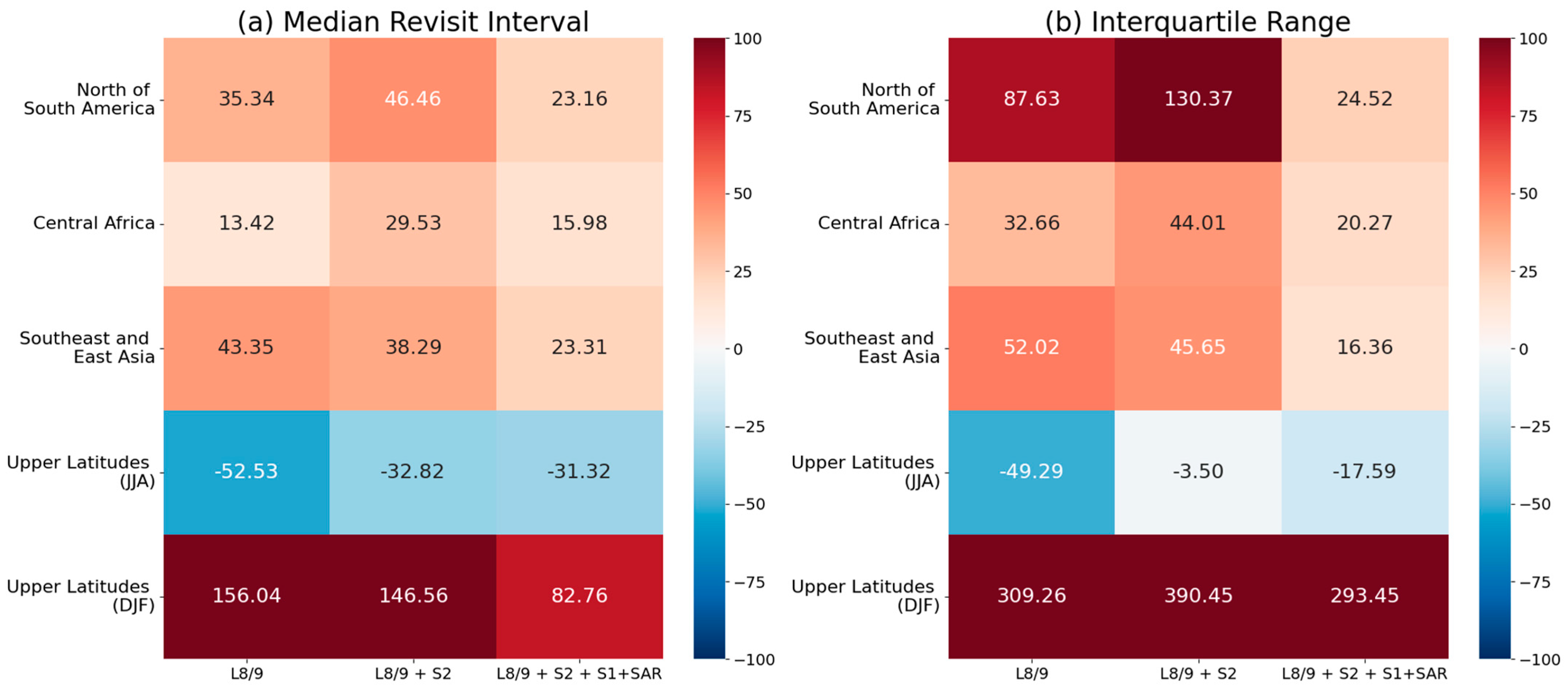
4.2. Progression after Data Fusion: Wet Season Months
5. Conclusions
- Explore alternative thresholding techniques: Preferably, multi-level thresholding that considers the different behaviors of various land covers;
- Investigate the complexity of vegetative environments: Examine the relationships between surface reflectances, water indices, vegetation indices, and radar backscatter signals to aid in integrating optical and SAR satellites.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gangrade, S.; Lu, D.; Kao, S.; Painter, S.L. Machine Learning Assisted Reservoir Operation Model for Long-Term Water Management Simulation. JAWRA J. Am. Water Resour. Assoc. 2022, 58, 1592–1603. [Google Scholar] [CrossRef]
- Donchyts, G.; Winsemius, H.; Baart, F.; Dahm, R.; Schellekens, J.; Gorelick, N.; Iceland, C.; Schmeier, S. High-Resolution Surface Water Dynamics in Earth’s Small and Medium-Sized Reservoirs. Sci. Rep. 2022, 12, 13776. [Google Scholar] [CrossRef] [PubMed]
- Lane, S.N. Natural Flood Management. WIREs Water 2017, 4, e1211. [Google Scholar] [CrossRef]
- Morita, M. Quantification of Increased Flood Risk Due to Global Climate Change for Urban River Management Planning. Water Sci. Technol. 2011, 63, 2967–2974. [Google Scholar] [CrossRef] [PubMed]
- Rezanezhad, F.; McCarter, C.P.R.; Lennartz, B. Editorial: Wetland Biogeochemistry: Response to Environmental Change. Front. Environ. Sci. 2020, 8, 55. [Google Scholar] [CrossRef]
- Meijide, A.; Gruening, C.; Goded, I.; Seufert, G.; Cescatti, A. Water Management Reduces Greenhouse Gas Emissions in a Mediterranean Rice Paddy Field. Agric. Ecosyst. Environ. 2017, 238, 168–178. [Google Scholar] [CrossRef]
- Karpatne, A.; Khandelwal, A.; Chen, X.; Mithal, V.; Faghmous, J.; Kumar, V. Global Monitoring of Inland Water Dynamics: State-of-the-Art, Challenges, and Opportunities. Comput. Sustain. 2016, 645, 121–147. [Google Scholar]
- Wulder, M.A.; Roy, D.P.; Radeloff, V.C.; Loveland, T.R.; Anderson, M.C.; Johnson, D.M.; Healey, S.; Zhu, Z.; Scambos, T.A.; Pahlevan, N.; et al. Fifty Years of Landsat Science and Impacts. Remote Sens. Environ. 2022, 280, 113195. [Google Scholar] [CrossRef]
- Melton, F.S.; Huntington, J.; Grimm, R.; Herring, J.; Hall, M.; Rollison, D.; Erickson, T.; Allen, R.; Anderson, M.; Fisher, J.B.; et al. OpenET: Filling a Critical Data Gap in Water Management for the Western United States. JAWRA J. Am. Water Resour. Assoc. 2022, 58, 971–994. [Google Scholar] [CrossRef]
- Buma, W.G.; Lee, S.-I.; Seo, J.Y. Recent Surface Water Extent of Lake Chad from Multispectral Sensors and GRACE. Sensors 2018, 18, 2082. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Pickens, A.H.; Tyukavina, A.; Hernandez-Serna, A.; Zalles, V.; Turubanova, S.; Kommareddy, I.; Stehman, S.V.; Song, X.-P.; et al. Global Land Use Extent and Dispersion within Natural Land Cover Using Landsat Data. Environ. Res. Lett. 2022, 17, 034050. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-Resolution Mapping of Global Surface Water and Its Long-Term Changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Pickens, A.H.; Hansen, M.C.; Hancher, M.; Stehman, S.V.; Tyukavina, A.; Potapov, P.; Marroquin, B.; Sherani, Z. Mapping and Sampling to Characterize Global Inland Water Dynamics from 1999 to 2018 with Full Landsat Time-Series. Remote Sens. Environ. 2020, 243, 111792. [Google Scholar] [CrossRef]
- Tulbure, M.G.; Broich, M.; Stehman, S.V.; Kommareddy, A. Surface Water Extent Dynamics from Three Decades of Seasonally Continuous Landsat Time Series at Subcontinental Scale in a Semi-Arid Region. Remote Sens. Environ. 2016, 178, 142–157. [Google Scholar] [CrossRef]
- Mueller, N.; Lewis, A.; Roberts, D.; Ring, S.; Melrose, R.; Sixsmith, J.; Lymburner, L.; McIntyre, A.; Tan, P.; Curnow, S.; et al. Water Observations from Space: Mapping Surface Water from 25 Years of Landsat Imagery across Australia. Remote Sens. Environ. 2016, 174, 341–352. [Google Scholar] [CrossRef]
- Yamazaki, D.; Trigg, M.A.; Ikeshima, D. Development of a Global ~90m Water Body Map Using Multi-Temporal Landsat Images. Remote Sens. Environ. 2015, 171, 337–351. [Google Scholar] [CrossRef]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for Science: Potential of Sentinel-1,-2, and-3 Missions for Scientific Observations of Ocean, Cryosphere, and Land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Berger, M.; Moreno, J.; Johannessen, J.A.; Levelt, P.F.; Hanssen, R.F. ESA’s Sentinel Missions in Support of Earth System Science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 Surface Reflectance Data Set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Tulbure, M.; Broich, M.; Gaines, M.; Stehman, S.; Pavelsky, T.; Perin, V.; Ju, J.; Yin, S.; Mai, J.; Betbeder-Matibet, L. Towards Global Flood Mapping with Machine Learning Based on the Harmonized Landsat-Sentinel 2 Data. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 13–17 December 2021; Volume 2021, p. H44E-03. [Google Scholar]
- Tulbure, M.G.; Broich, M.; Ju, J.; Masek, J.G.; Wearne, J. Quantifying Surface Water Extent and Flooding in a Dynamic Dryland River System Using the Harmonized Landsat/Sentinel-2 Reflectance Product. In Proceedings of the AGU Fall Meeting Abstracts, Washington, DC, USA, 10–14 December 2018; Volume 2018, p. H21E-08. [Google Scholar]
- Ju, Y.; Bohrer, G. Classification of Wetland Vegetation Based on NDVI Time Series from the HLS Dataset. Remote Sens. 2022, 14, 2107. [Google Scholar] [CrossRef]
- Hu, J.; Chen, Y.; Cai, Z.; Wei, H.; Zhang, X.; Zhou, W.; Wang, C.; You, L.; Xu, B. Mapping Diverse Paddy Rice Cropping Patterns in South China Using Harmonized Landsat and Sentinel-2 Data. Remote Sens. 2023, 15, 1034. [Google Scholar] [CrossRef]
- Li, J.; Li, L.; Song, Y.; Chen, J.; Wang, Z.; Bao, Y.; Zhang, W.; Meng, L. A Robust Large-Scale Surface Water Mapping Framework with High Spatiotemporal Resolution Based on the Fusion of Multi-Source Remote Sensing Data. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103288. [Google Scholar] [CrossRef]
- Valerio, F.; Godinho, S.; Ferraz, G.; Pita, R.; Gameiro, J.; Silva, B.; Marques, A.T.; Silva, J.P. Multi-Temporal Remote Sensing of Inland Surface Waters: A Fusion of Sentinel-1 & 2 Data Applied to Small Seasonal Ponds in Semiarid Environments. bioRxiv 2024. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, S.; Wang, N.; Ming, Y.; Huang, C. Fusing Landsat-8, Sentinel-1, and Sentinel-2 Data for River Water Mapping Using Multidimensional Weighted Fusion Method. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4208012. [Google Scholar] [CrossRef]
- Tang, H.; Lu, S.; Ali Baig, M.H.; Li, M.; Fang, C.; Wang, Y. Large-Scale Surface Water Mapping Based on Landsat and Sentinel-1 Images. Water 2022, 14, 1454. [Google Scholar] [CrossRef]
- Li, J.; Roy, D. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, R.; Shang, R. GLOBMAP SWF: A Global Annual Surface Water Cover Frequency Dataset during 2000–2020. Earth Syst. Sci. Data 2022, 14, 4505–4523. [Google Scholar] [CrossRef]
- Han, Q.; Niu, Z. Construction of the Long-Term Global Surface Water Extent Dataset Based on Water-NDVI Spatio-Temporal Parameter Set. Remote Sens. 2020, 12, 2675. [Google Scholar] [CrossRef]
- Baba, H.; Kannemadugu, S.; Hareef Baba, K.; Joshi, A.K.; Moharil, S. V Surface Reflectance Retrieval from the High Resolution Multispectral Satellite Image Using 6S Radiative Transfer Model. Int. J. Remote Sens. GIS 2013, 2, 1–9. [Google Scholar]
- Chen, H.-W.; Cheng, K.-S. A Conceptual Model of Surface Reflectance Estimation for Satellite Remote Sensing Images Using in Situ Reference Data. Remote Sens. 2012, 4, 934–949. [Google Scholar] [CrossRef]
- Singh, K.V.; Setia, R.; Sahoo, S.; Prasad, A.; Pateriya, B. Evaluation of NDWI and MNDWI for Assessment of Waterlogging by Integrating Digital Elevation Model and Groundwater Level. Geocarto Int. 2015, 30, 650–661. [Google Scholar] [CrossRef]
- Ali, M.I.; Dirawan, G.D.; Hasim, A.H.; Abidin, M.R. Detection of Changes in Surface Water Bodies Urban Area with NDWI and MNDWI Methods. Int. J. Adv. Sci. Eng. Inf. Technol. 2019, 9, 946–951. [Google Scholar] [CrossRef]
- Laonamsai, J.; Julphunthong, P.; Saprathet, T.; Kimmany, B.; Ganchanasuragit, T.; Chomcheawchan, P.; Tomun, N. Utilizing NDWI, MNDWI, SAVI, WRI, and AWEI for Estimating Erosion and Deposition in Ping River in Thailand. Hydrology 2023, 10, 70. [Google Scholar] [CrossRef]
- da Silva, J.L.B.; de Albuquerque Moura, G.B.; da Silva, M.V.; Lopes, P.M.O.; de Souza Guedes, R.V.; de França e Silva, Ê.F.; Ortiz, P.F.S.; de Moraes Rodrigues, J.A. Changes in the Water Resources, Soil Use and Spatial Dynamics of Caatinga Vegetation Cover over Semiarid Region of the Brazilian Northeast. Remote Sens. Appl. 2020, 20, 100372. [Google Scholar] [CrossRef]
- Vreugdenhil, M.; Wagner, W.; Bauer-Marschallinger, B.; Pfeil, I.; Teubner, I.; Rüdiger, C.; Strauss, P. Sensitivity of Sentinel-1 Backscatter to Vegetation Dynamics: An Austrian Case Study. Remote Sens. 2018, 10, 1396. [Google Scholar] [CrossRef]
- Huang, S.; Ding, J.; Zou, J.; Liu, B.; Zhang, J.; Chen, W. Soil Moisture Retrival Based on Sentinel-1 Imagery under Sparse Vegetation Coverage. Sensors 2019, 19, 589. [Google Scholar] [CrossRef]
- Tran, K.H.; Menenti, M.; Jia, L. Surface Water Mapping and Flood Monitoring in the Mekong Delta Using Sentinel-1 SAR Time Series and Otsu Threshold. Remote Sens. 2022, 14, 5721. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef]
- Xu, H. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Roth, F.; Tupas, M.E.; Bauer-Marschallinger, B.; Wagner, W. Comparison of VV and VH Polarization for Sentinel-1 Based Flood Mapping. In Proceedings of the Hydrospace 2023, Lissabon, Portugal, 27 November–1 December 2023. [Google Scholar]
- Altman, D.G. Practical Statistics for Medical Research; Chapman and Hall/CRC: Boca Raton, FL, USA, 1990; ISBN 9780429258589. [Google Scholar]
- Peña-Luque, S.; Ferrant, S.; Cordeiro, M.C.R.; Ledauphin, T.; Maxant, J.; Martinez, J.-M. Sentinel-1 & 2 Multitemporal Water Surface Detection Accuracies, Evaluated at Regional and Reservoirs Level. Remote Sens. 2021, 13, 3279. [Google Scholar] [CrossRef]
- Schmitt, M. Potential of Large-Scale Inland Water Body Mapping from Sentinel-1/2 Data on the Example of Bavaria’s Lakes and Rivers. PFG—J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 271–289. [Google Scholar] [CrossRef]
- Dewan, A.M.; Kankam-Yeboah, K.; Nishigaki, M. Using Synthetic Aperture Radar (SAR) Data for Mapping River Water Flooding in an Urban Landscape: A Case Study of Greater Dhaka, Bangladesh. J. Jpn. Soc. Hydrol. Water Resour. 2006, 19, 44–54. [Google Scholar] [CrossRef]
- Druce, D.; Tong, X.; Lei, X.; Guo, T.; Kittel, C.M.M.; Grogan, K.; Tottrup, C. An Optical and SAR Based Fusion Approach for Mapping Surface Water Dynamics over Mainland China. Remote Sens. 2021, 13, 1663. [Google Scholar] [CrossRef]
- Dunn, B.; Ai, E.; Alger, M.J.; Fanson, B.; Fickas, K.C.; Krause, C.E.; Lymburner, L.; Nanson, R.; Papas, P.; Ronan, M.; et al. Wetlands Insight Tool: Characterising the Surface Water and Vegetation Cover Dynamics of Individual Wetlands Using Multidecadal Landsat Satellite Data. Wetlands 2023, 43, 37. [Google Scholar] [CrossRef]
- Rahaman, J.; Sing, M. An Efficient Multilevel Thresholding Based Satellite Image Segmentation Approach Using a New Adaptive Cuckoo Search Algorithm. Expert Syst. Appl. 2021, 174, 114633. [Google Scholar] [CrossRef]
- Sehgal, S.; Kumar, S.; Bindu, M.H. Remotely Sensed Image Thresholding Using OTSU & Differential Evolution Approach. In Proceedings of the 2017 7th International Conference on Cloud Computing, Data Science & Engineering—Confluence, Noida, India, 12–13 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 138–142. [Google Scholar]
- Akiyama, T.S.; Junior, J.M.; Goncalves, W.N.; de Araujo Carvalho, M.; Eltner, A. Evaluating Different Deep Learning Models for Automatic Water Segmentation. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4716–4719. [Google Scholar]
- Yuan, K.; Zhuang, X.; Schaefer, G.; Feng, J.; Guan, L.; Fang, H. Deep-Learning-Based Multispectral Satellite Image Segmentation for Water Body Detection. IEEE J. Sel. Top Appl. Earth Obs. Remote Sens. 2021, 14, 7422–7434. [Google Scholar] [CrossRef]
- Muñoz-Sabater, J.; Dutra, E.; Agustí-Panareda, A.; Albergel, C.; Arduini, G.; Balsamo, G.; Boussetta, S.; Choulga, M.; Harrigan, S.; Hersbach, H.; et al. ERA5-Land: A State-of-the-Art Global Reanalysis Dataset for Land Applications. Earth Syst. Sci. Data 2021, 13, 4349–4383. [Google Scholar] [CrossRef]
- Li, J.; Chen, B. Global Revisit Interval Analysis of Landsat-8 -9 and Sentinel-2A -2B Data for Terrestrial Monitoring. Sensors 2020, 20, 6631. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Collection Name | GEE Image Collection Snippet |
|---|---|---|
| Landsat-8 | Level 2, Collection 2, Tier 1 | LANDSAT/LC08/C02/T1_L2 |
| Landsat-9 | Level 2, Collection 2, Tier 1 | LANDSAT/LC09/C02/T1_L2 |
| Sentinel-2 | Multispectral Instrument Level-2A | COPERNICUS/S2_SR_HARMONIZED |
| Cloud Probability | COPERNICUS/S2_CLOUD_PROBABILITY | |
| Sentinel-1 | C-band Synthetic Aperture Radar Ground-Range Detected | COPERNICUS/S1_GRD |
| Kappa Coefficient, κ | Degree of Harmony Interpretation |
|---|---|
| 1 | Perfect Harmony |
| 0.80–0.99 | Very Strong Harmony |
| 0.60–0.79 | Strong Harmony |
| 0.40–0.59 | Moderate Harmony |
| 0.20–0.39 | Weak Harmony |
| 0.01–0.19 | Very Weak Harmony |
| ≤0 | No Harmony |
| L8/9 (Days) | L8/9 + S2 (Days) | L8/9 + S2 + S1SAR (Days) | |
|---|---|---|---|
| North of South America | 22.41 | 7.77 | 4.62 |
| (14.55) | (4.61) | (2.61) | |
| Central Africa | 15.87 | 5.79 | 3.88 |
| (12.92) | (4.34) | (2.22) | |
| Southeast and East Asia | 15.87 | 5.98 | 3.69 |
| (11.40) | (4.14) | (2.69) | |
| Upper Latitudes | 17.38 | 4.51 | 3.48 |
| (16.31) | (3.14) | (2.90) | |
| Rest of the World | 10.74 | 4.20 | 3.09 |
| (8.27) | (3.77) | (3.34) |
| Critical Regions | Dominant Wet Season Months | Dominant Wet Season Months for Analysis |
|---|---|---|
| North of South America | DJF, MAM | MAM |
| Central Africa | DJF, JJA, SON | SON |
| Southeast and East Asia | JJA | JJA |
| Upper Latitudes | JJA | JJA |
| L8/9 (Days) | L8/9 + S2 (Days) | L8/9 + S2 + S1SAR (Days) | |
|---|---|---|---|
| North of South America (MAM) | 30.33 (27.30) | 11.38 (10.62) | 5.69 (3.25) |
| Central Africa (SON) | 18.00 (17.14) | 7.50 (6.25) | 4.50 (2.67) |
| Southeast and East Asia (JJA) | 22.75 (17.33) | 8.27 (6.03) | 4.55 (3.13) |
| Upper Latitudes (JJA) | 8.27 (7.94) | 3.03 (2.85) | 2.39 (2.17) |
| Upper Latitudes (DFJ) | 44.50 (66.75) | 11.12 (15.40) | 6.36 (11.41) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Declaro, A.; Kanae, S. Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR. Remote Sens. 2024, 16, 3329. https://doi.org/10.3390/rs16173329
Declaro A, Kanae S. Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR. Remote Sensing. 2024; 16(17):3329. https://doi.org/10.3390/rs16173329
Chicago/Turabian StyleDeclaro, Alexis, and Shinjiro Kanae. 2024. "Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR" Remote Sensing 16, no. 17: 3329. https://doi.org/10.3390/rs16173329
APA StyleDeclaro, A., & Kanae, S. (2024). Enhancing Surface Water Monitoring through Multi-Satellite Data-Fusion of Landsat-8/9, Sentinel-2, and Sentinel-1 SAR. Remote Sensing, 16(17), 3329. https://doi.org/10.3390/rs16173329