


Interferometric Radars for Bridge Monitoring: Comparison among X-Bands, Ku-Bands, and W-Bands

 ,
,  , , ,
, , , 
Abstract
1. Introduction
2. Materials and Methods
Equipment
3. Results
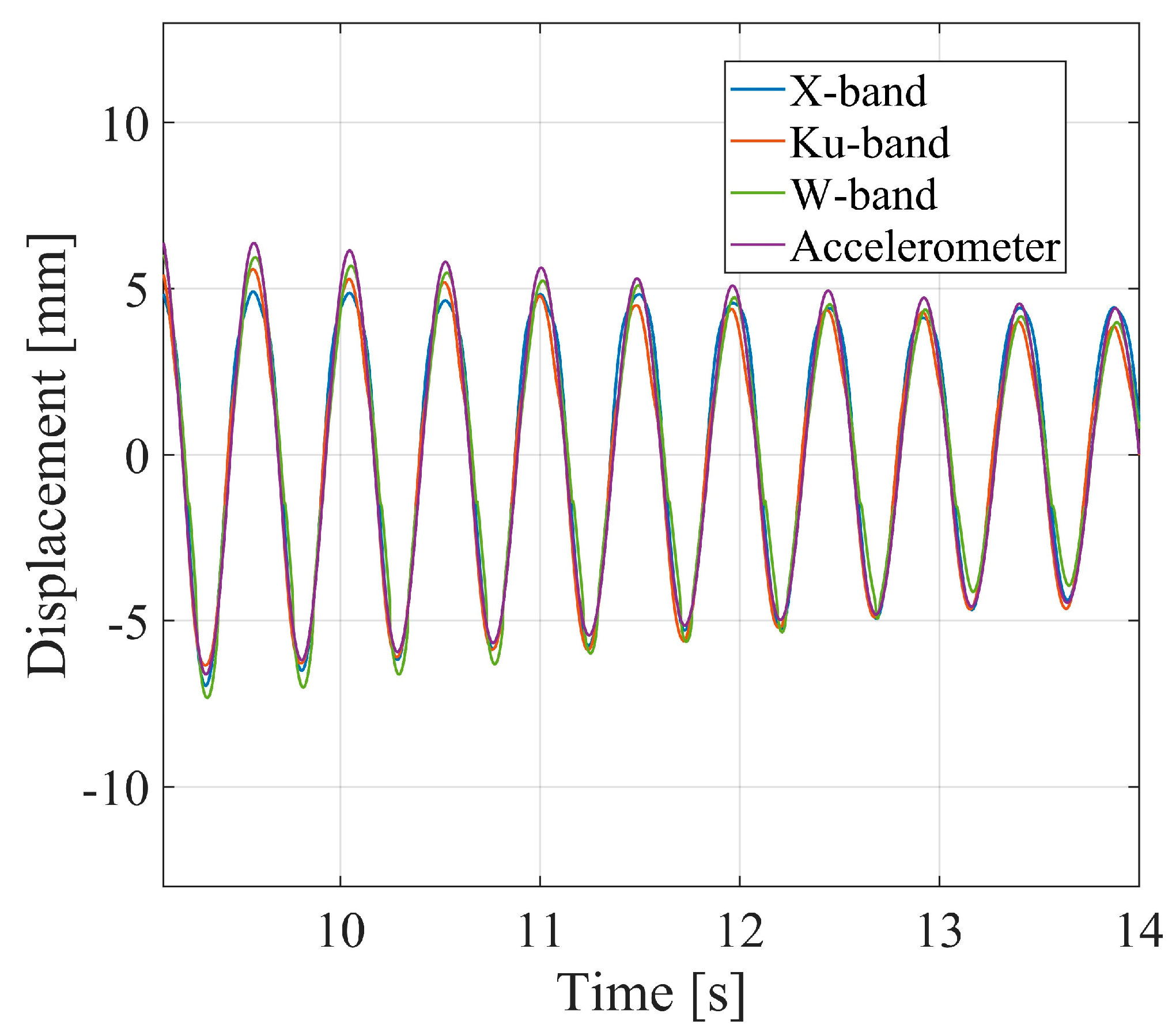
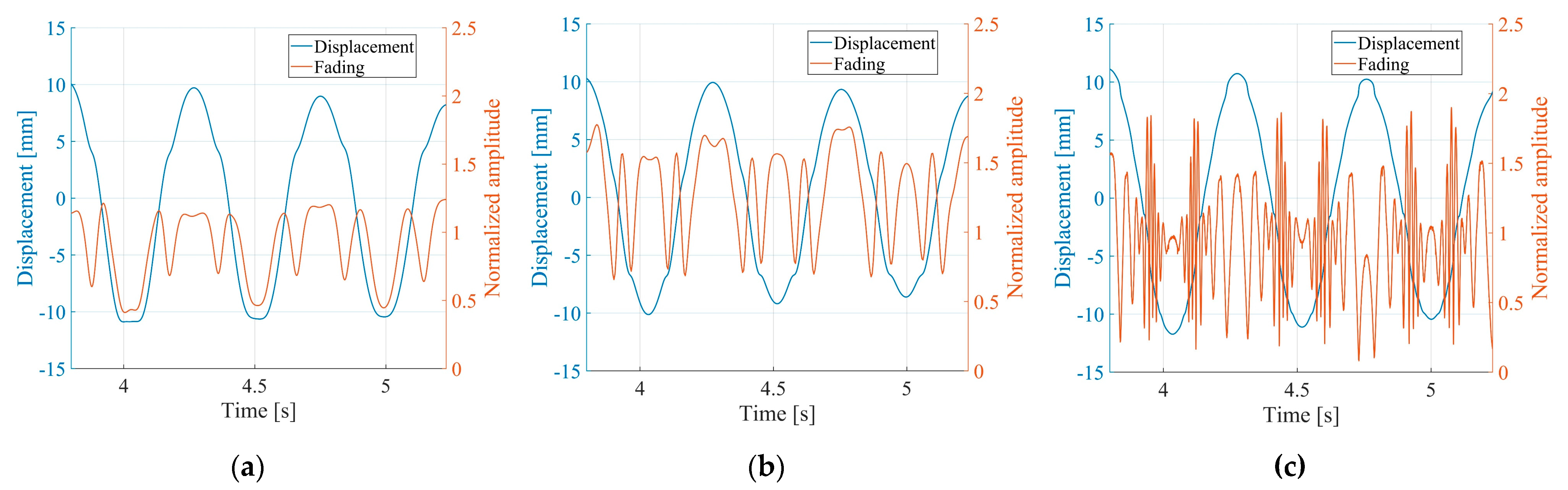
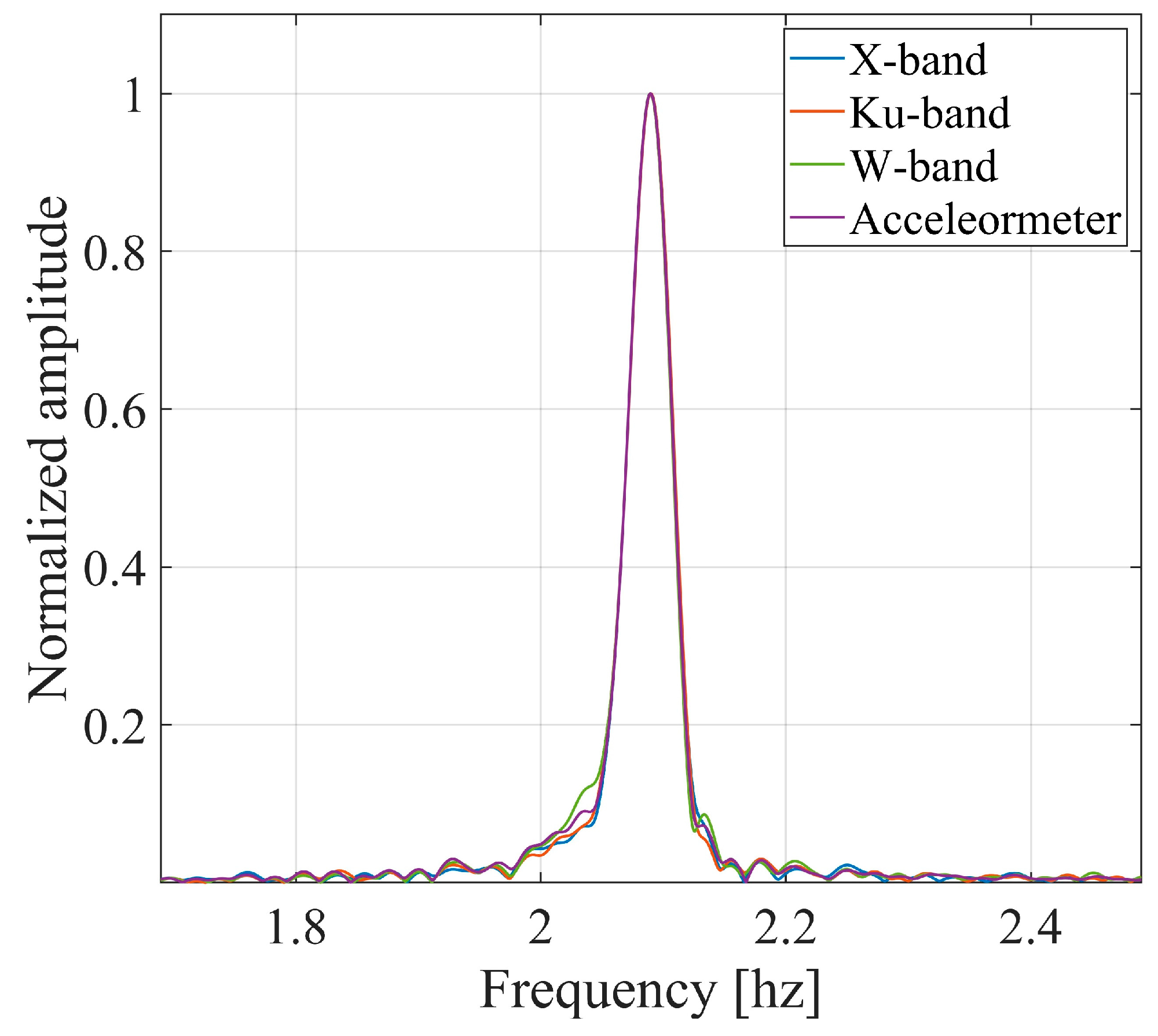
3.1. Experimental Results: Controlled Scenario
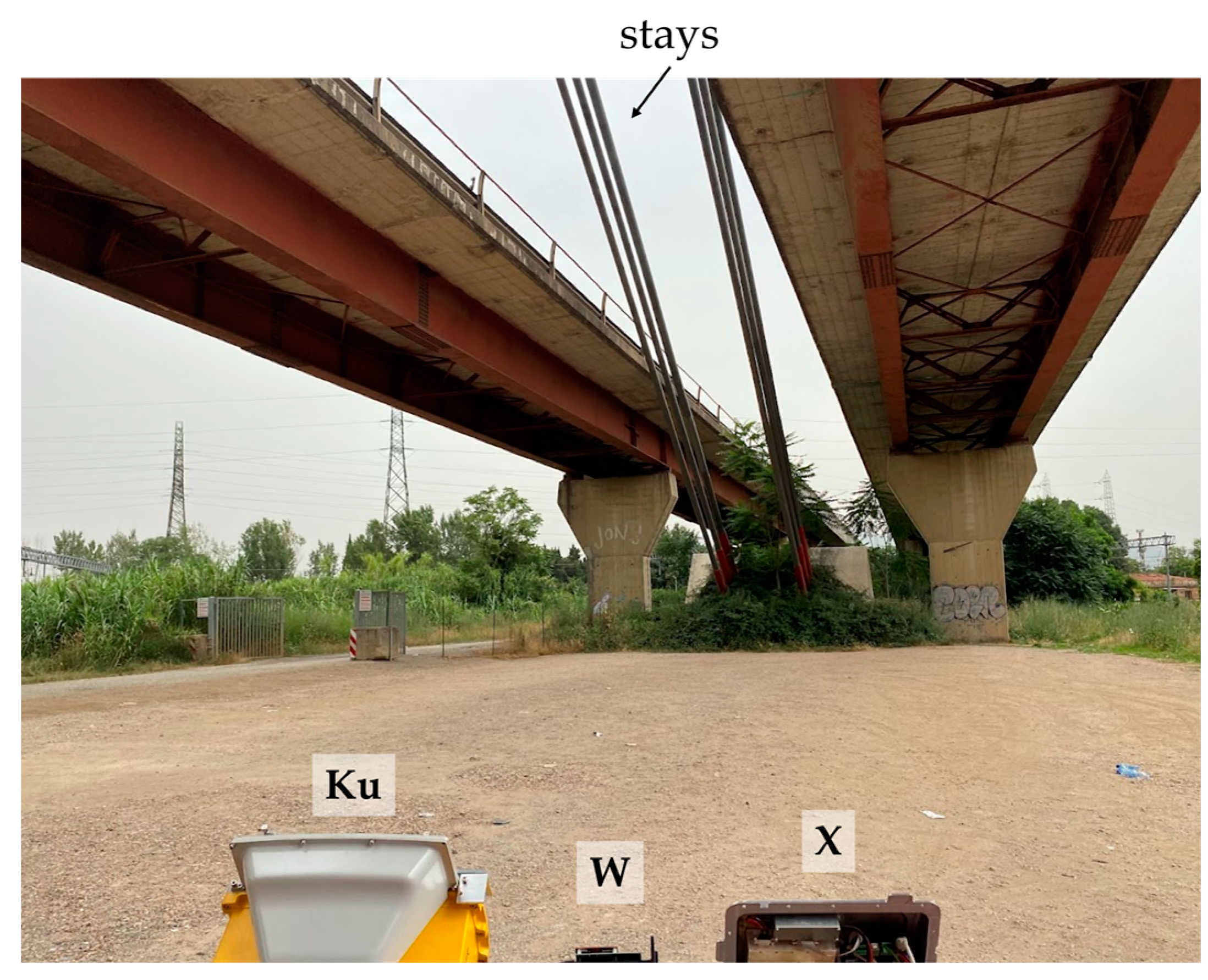
3.2. Experimental Results: Bridge Stays Case Study
3.3. Experimental Results: Bridge Access Ramp Case Study
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, Z.; Chung, J.; Liu, P.; Sohn, H. Bridge displacement estimation by fusing accelerometer and strain gauge measurements. Struct. Control Health Monit. 2021, 28, e2733. [Google Scholar] [CrossRef]
- Morichika, S.; Sekiya, H.; Zhu, Y.; Hirano, S.; Maruyama, O. Estimation of Displacement Response in Steel Plate Girder Bridge Using a Single MEMS Accelerometer. IEEE Sens. J. 2021, 21, 8204–8208. [Google Scholar] [CrossRef]
- Mazzei, M.; Lellis, A.M.D. Capacitive accelerometers at low frequency for infrastructure monitoring. Procedia Struct. Integr. 2023, 44, 1212–1219. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, B.; Ding, X.; Zhang, L.; Zhang, Z.; Zhang, Z. Radar Interferometry for Urban Infrastructure Stability Monitoring: From Techniques to Applications. Sustainability 2023, 15, 14654. [Google Scholar] [CrossRef]
- Pieraccini, M.; Parrini, F.; Fratini, M.; Atzeni, C.; Spinelli, P.; Micheloni, M. Static and dynamic testing of bridges through microwave interferometry. NDT E Int. 2007, 40, 208–214. [Google Scholar] [CrossRef]
- Zhang, B.; Ding, X.; Werner, C.; Tan, K.; Zhang, B.; Jiang, M.; Zhao, J.; Xu, Y. Dynamic displacement monitoring of long-span bridges with a microwave radar interferometer. ISPRS J. Photogramm. Remote Sens. 2018, 138, 252–264. [Google Scholar] [CrossRef]
- Pieraccini, M.; Fratini, M.; Parrini, F.; Atzeni, C.; Bartoli, G. Interferometric radar vs. accelerometer for dynamic monitoring of large structures: An experimental comparison. NDT E Int. 2008, 41, 258–264. [Google Scholar] [CrossRef]
- Tarchi, D.; Rudolf, H.; Pieraccini, M.; Atzeni, C. Remote monitoring of buildings using a ground-based SAR: Application to cultural heritage survey. Int. J. Remote Sens. 2000, 21, 3545–3551. [Google Scholar] [CrossRef]
- Michel, C.; Keller, S. Advancing Ground-Based Radar Processing for Bridge Infrastructure Monitoring. Sensors 2021, 21, 2172. [Google Scholar] [CrossRef]
- Zou, L.; Feng, W.; Masci, O.; Nico, G.; Alani, A.M.; Sato, M. Bridge Monitoring Strategies for Sustainable Development with Microwave Radar Interferometry. Sustainability 2024, 16, 2607. [Google Scholar] [CrossRef]
- Pagnini, L.; Miccinesi, L.; Beni, A.; Pieraccini, M. Transversal Displacement Detection of an Arched Bridge with a Multimonostatic Multiple-Input Multiple-Output Radar. Sensors 2024, 24, 1839. [Google Scholar] [CrossRef] [PubMed]
- Miccinesi, L.; Pieraccini, M. Bridge Monitoring by a Monostatic/Bistatic Interferometric Radar Able to Retrieve the Dynamic 3D Displacement Vector. IEEE Access 2020, 8, 210339–210346. [Google Scholar] [CrossRef]
- Miccinesi, L.; Beni, A.; Pieraccini, M. Multi-Monostatic Interferometric Radar for Bridge Monitoring. Electronics 2021, 10, 247. [Google Scholar] [CrossRef]
- Miccinesi, L.; Pieraccini, M.; Beni, A.; Andries, O.; Consumi, T. Multi-Monostatic Interferometric Radar with Radar Link for Bridge Monitoring. Electronics 2021, 10, 2777. [Google Scholar] [CrossRef]
- Pramudita, A.A.; Lin, D.-B.; Dhiyani, A.A.; Ryanu, H.H.; Adiprabowo, T.; Yudha, E.A. FMCW Radar for Noncontact Bridge Structure Displacement Estimation. IEEE Trans. Instrum. Meas. 2023, 72, 2960. [Google Scholar] [CrossRef]
- Pieraccini, M.; Miccinesi, L. Ground-Based Radar Interferometry: A Bibliographic Review. Remote Sens. 2019, 11, 1029. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, Q.; Hu, X.; Li, Z.; Li, B.; Zhang, J.; Jiang, W.; Luo, Y.; Li, Q.; Ba, R. Detecting the slope movement after the 2018 Baige Landslides based on ground-based and space-borne radar observations. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101949. [Google Scholar] [CrossRef]
- Liu, B.; Ge, D.; Li, M.; Zhang, L.; Wang, Y.; Zhang, X. Using GB-SAR technique to monitor displacement of open pit slope. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5986–5989. [Google Scholar] [CrossRef]
- Sofi, M.; Lumantarna, E.; Zhong, A.; Mendis, P.A.; Duffield, C.; Barnes, R. Determining dynamic characteristics of high rise buildings using interferometric radar system. Eng. Struct. 2018, 164, 230–242. [Google Scholar] [CrossRef]
- Luzi, G.; Crosetto, M.; Fernández, E. Radar Interferometry for Monitoring the Vibration Characteristics of Buildings and Civil Structures: Recent Case Studies in Spain. Sensors 2017, 17, 669. [Google Scholar] [CrossRef]
- Jung, J.; Kim, D.; Vadivel, S.K.P.; Yun, S.-H. Long-Term Deflection Monitoring for Bridges Using X and C-Band Time-Series SAR Interferometry. Remote Sens. 2019, 11, 1258. [Google Scholar] [CrossRef]
- Lazecky, M.; Hlavacova, I.; Bakon, M.; Sousa, J.J.; Perissin, D.; Patricio, G. Bridge Displacements Monitoring Using Space-Borne X-Band SAR Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 205–210. [Google Scholar] [CrossRef]
- de Macedo, K.A.C.; Ramos, F.L.G.; Gaboardi, C.; Moreira, J.R.; Vissirini, F.; da Costa, M.S. A Compact Ground-Based Interferometric Radar for Landslide Monitoring: The Xerém Experiment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 975–986. [Google Scholar] [CrossRef]
- Michelini, A.; Coppi, F.; Bicci, A.; Alli, G. SPARX, a MIMO Array for Ground-Based Radar Interferometry. Sensors 2019, 19, 252. [Google Scholar] [CrossRef]
- Viviani, F.; Michelini, A.; Mayer, L. RockSpot: An Interferometric Doppler Radar for Rockfall/Avalanche Detection and Tracking. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Papi, F.; Donati, N.; Pieraccini, M. Handy Microwave Sensor for Remote Detection of Structural Vibration. In Proceedings of the EWSHM—7th European Workshop on Structural Health Monitoring, Nantes, Frances, 8–11 July 2014; Available online: https://inria.hal.science/hal-01020380 (accessed on 12 July 2024).
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Venon, A.; Dupuis, Y.; Vasseur, P.; Merriaux, P. Millimeter Wave FMCW RADARs for Perception, Recognition and Localization in Automotive Applications: A Survey. IEEE Trans. Intell. Veh. 2022, 7, 533–555. [Google Scholar] [CrossRef]
- Li, S.; Xiong, Y.; Ren, Z.; Peng, Z. Structural Health Monitoring of Large Structures via mmWave Sensing. J. Phys. Conf. Ser. 2022, 2184, 012042. [Google Scholar] [CrossRef]
- Lian, W.; Wang, G.; Liu, S.; Zhu, G. Real-Time Deformation Monitoring for Tunnels Using Distributed Millimeter Wave Radar. In Proceedings of the 2022 4th International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 9–11 December 2022; pp. 664–668. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Yang, L.; Sohn, H. Structural displacement estimation using accelerometer and FMCW millimeter wave radar. Mech. Syst. Signal Process. 2023, 182, 109582. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Sohn, H. Continuous bridge displacement estimation using millimeter-wave radar, strain gauge and accelerometer. Mech. Syst. Signal Process. 2023, 197, 110408. [Google Scholar] [CrossRef]
- Pagnini, L.; Beni, A.; Cioncolini, A.; Miccinesi, L.; Voci, F.; Pieraccini, M. Application of a W-band Radar for Dynamic Monitoring of Bridges. In Proceedings of the 2024 4th URSI Atlantic Radio Science Meeting (AT-RASC), Gran Canaria, Spain, 19–24 May 2024; pp. 1–4. [Google Scholar] [CrossRef]
- Miccinesi, L.; Consumi, T.; Beni, A.; Pieraccini, M. W-band MIMO GB-SAR for Bridge Testing/Monitoring. Electronics 2021, 10, 2261. [Google Scholar] [CrossRef]
- Beni, A.; Miccinesi, L.; Pieraccini, M. Correlation between Coherence and Atmospheric Parameters in S, C, AND Ku-Band GBSAR Systems. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 4844–4847. [Google Scholar] [CrossRef]
- Costantini, M.; Farina, A.; Zirilli, F. A fast phase unwrapping algorithm for SAR interferometry. IEEE Trans. Geosci. Remote Sens. 1999, 37, 452–460. [Google Scholar] [CrossRef]
- Cidronali, A.; Pagnini, L.; Collodi, G.; Passafiume, M. A Highly Linear Ka-Band GaN-on-Si Active Balanced Mixer for Radar Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 69, 4453–4464. [Google Scholar] [CrossRef]
- Ma, Z.-F.; Jiang, M.; Khoshmanesh, M.; Cheng, X. Time Series Phase Unwrapping Based on Graph Theory and Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5204412. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y. Artificial Intelligence in Interferometric Synthetic Aperture Radar Phase Unwrapping: A Review. IEEE Geosci. Remote Sens. Mag. 2021, 9, 10–28. [Google Scholar] [CrossRef]
- Pu, L.; Zhang, X.; Zhou, Z.; Li, L.; Zhou, L.; Shi, J.; Wei, S. A Robust InSAR Phase Unwrapping Method via Phase Gradient Estimation Network. Remote Sens. 2021, 13, 4564. [Google Scholar] [CrossRef]
- IBIS-FM EVO. Available online: https://idsgeoradar.com/products/interferometric-radar/ibis-fm-evo (accessed on 15 July 2024).
- RockSpot. Available online: https://idsgeoradar.com/products/interferometric-radar/rockspot (accessed on 15 July 2024).
- AWR1843BOOST Evaluation Board|TI.com. Available online: https://www.ti.com/tool/AWR1843BOOST (accessed on 3 August 2023).
- Iglesias, R.; Fabregas, X.; Aguasca, A.; Mallorqui, J.J.; López-Martínez, C.; Gili, J.A.; Corominas, J. Atmospheric Phase Screen Compensation in Ground-Based SAR With a Multiple-Regression Model Over Mountainous Regions. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2436–2449. [Google Scholar] [CrossRef]
- Bush, T.F.; Uloby, F.T. Fading Characteristics of Panchromatic Radar Backscatter from Selected Agricultural Targets. IEEE Trans. Geosci. Electron. 1975, 13, 149–157. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | X-Band | Ku-Band | W-Band |
|---|---|---|---|
| TX channels | 1 | 1 | 3 |
| RX channels | 4 | 1 | 4 |
| Bandwidth | 200 MHz | 199.86 MHz | 180.04 MHz |
| Range resolution | 0.75 m | 0.75 m | 0.83 m |
| Number of samples | 512 | 3997 | 350 |
| Unambiguous range | 384 m | 3001 m | 291.6 m |
| PRF | 7246 Hz | 247 Hz | 2564 Hz |
| X-Band (Hz) | Ku-Band (Hz) | W-Band (Hz) | Accelerometer (Hz) |
|---|---|---|---|
| X-Band (Hz) | Ku-Band (Hz) | W-Band (Hz) |
|---|---|---|
| X-Band (Hz) | Ku-Band (Hz) | W-Band (Hz) | |
|---|---|---|---|
| X-Band | Ku-Band | W-Band | |
|---|---|---|---|
| Experiment 1 | |||
| Frequency (Hz) | |||
| Experiment 2 | |||
| Frequency (Hz) | |||
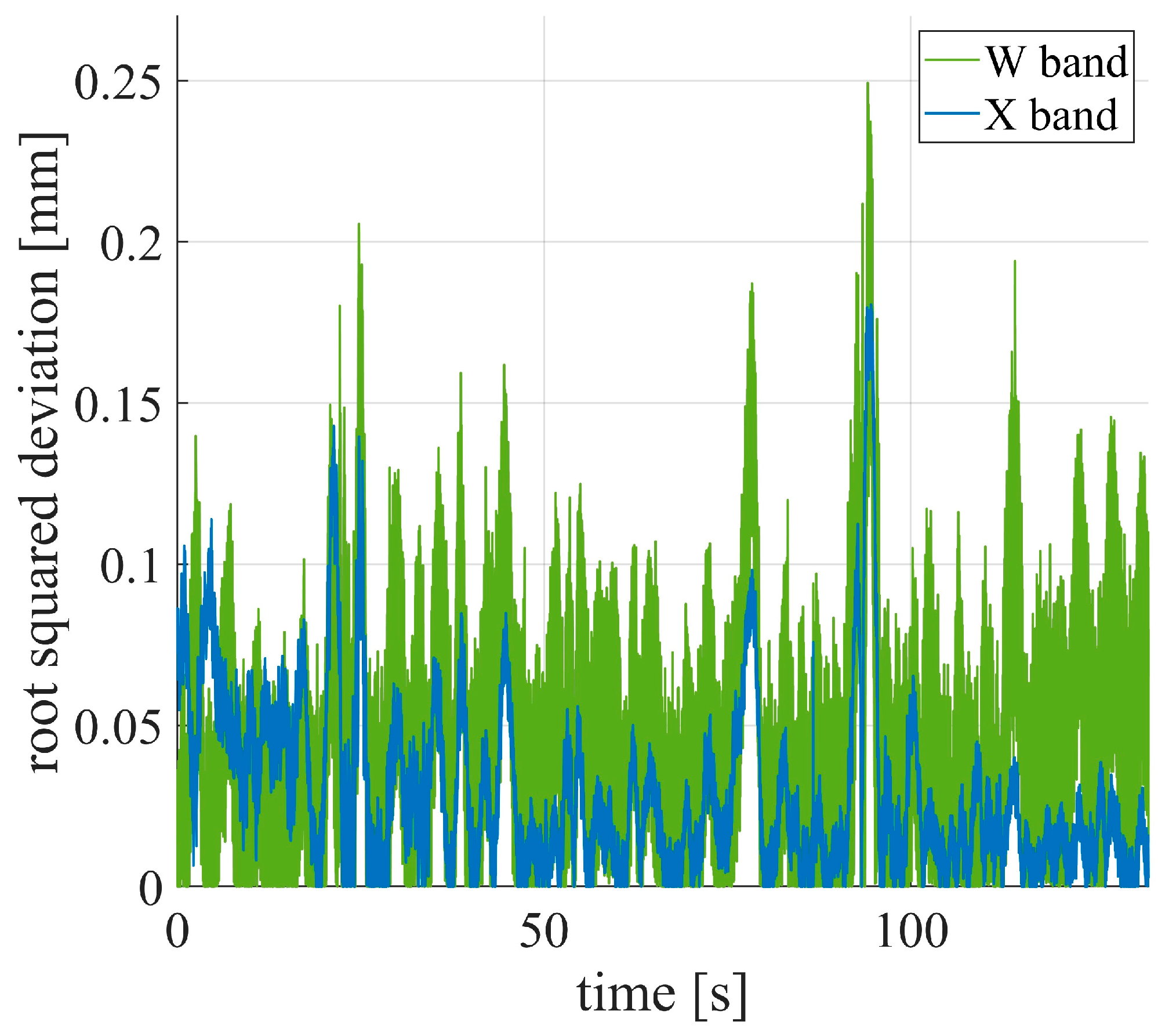
| Max RSD (mm) | 0.18 | - | 0.25 |
| Mean RSD (mm) | 0.03 | - | 0.04 |
| Experiment 3 | |||
| (Hz) | |||
| (Hz) | |||
| Max RSD (mm) | 0.58 | - | 0.27 |
| Mean RSD (mm) | 0.14 | - | 0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beni, A.; Miccinesi, L.; Pagnini, L.; Cioncolini, A.; Shan, J.; Pieraccini, M. Interferometric Radars for Bridge Monitoring: Comparison among X-Bands, Ku-Bands, and W-Bands. Remote Sens. 2024, 16, 3323. https://doi.org/10.3390/rs16173323
Beni A, Miccinesi L, Pagnini L, Cioncolini A, Shan J, Pieraccini M. Interferometric Radars for Bridge Monitoring: Comparison among X-Bands, Ku-Bands, and W-Bands. Remote Sensing. 2024; 16(17):3323. https://doi.org/10.3390/rs16173323
Chicago/Turabian StyleBeni, Alessandra, Lapo Miccinesi, Lorenzo Pagnini, Andrea Cioncolini, Jingfeng Shan, and Massimiliano Pieraccini. 2024. "Interferometric Radars for Bridge Monitoring: Comparison among X-Bands, Ku-Bands, and W-Bands" Remote Sensing 16, no. 17: 3323. https://doi.org/10.3390/rs16173323
APA StyleBeni, A., Miccinesi, L., Pagnini, L., Cioncolini, A., Shan, J., & Pieraccini, M. (2024). Interferometric Radars for Bridge Monitoring: Comparison among X-Bands, Ku-Bands, and W-Bands. Remote Sensing, 16(17), 3323. https://doi.org/10.3390/rs16173323