


AoI Analysis of Satellite–UAV Synergy Real-Time Remote Sensing System

 ,
, 
 ,
,
Abstract
1. Introduction
2. System Model
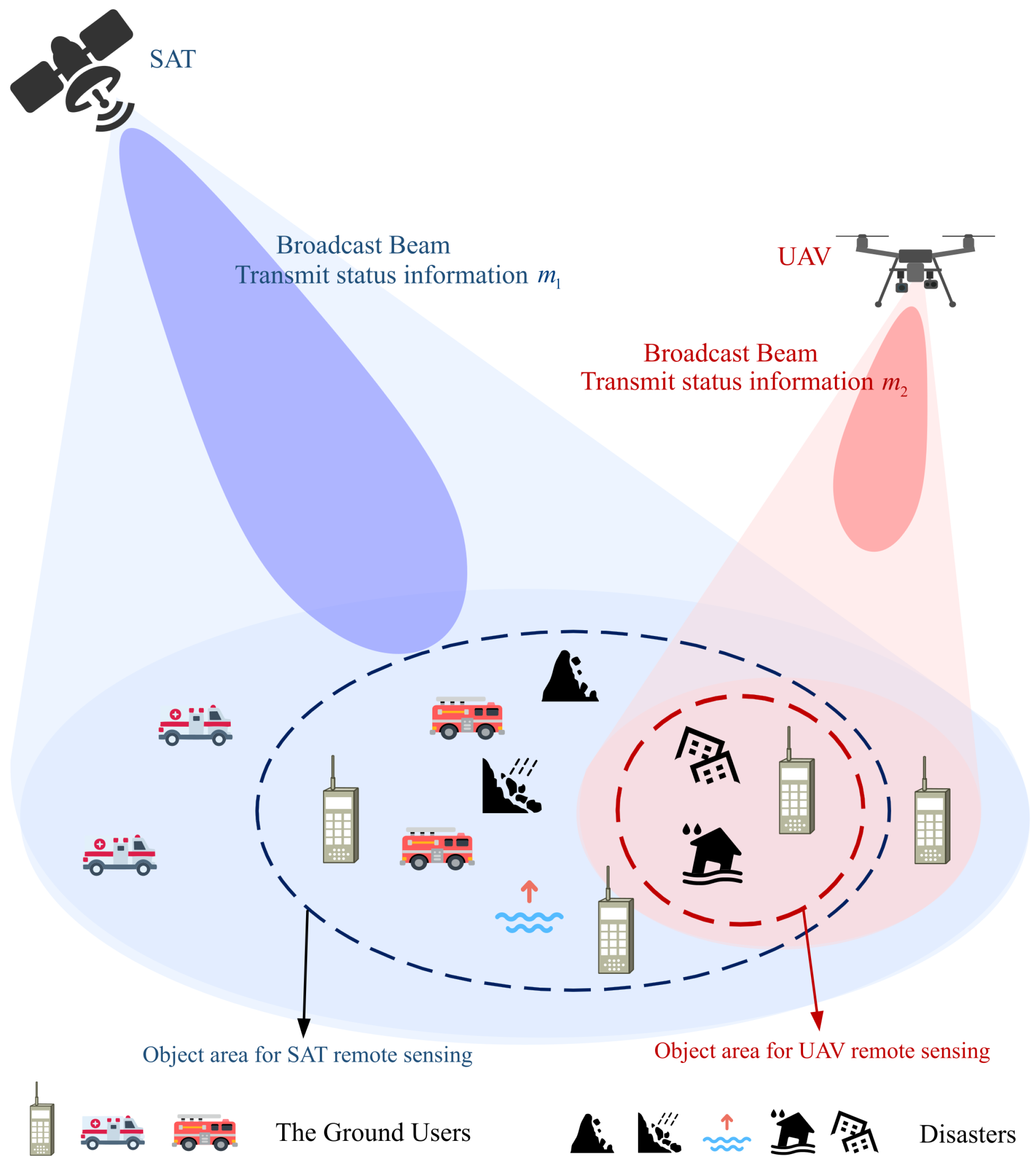
2.1. Scenario
2.2. Communication Model
2.2.1. The Channel Gain
2.2.2. The Channel Gain
2.2.3. SINR
2.3. AoI Analysis Model
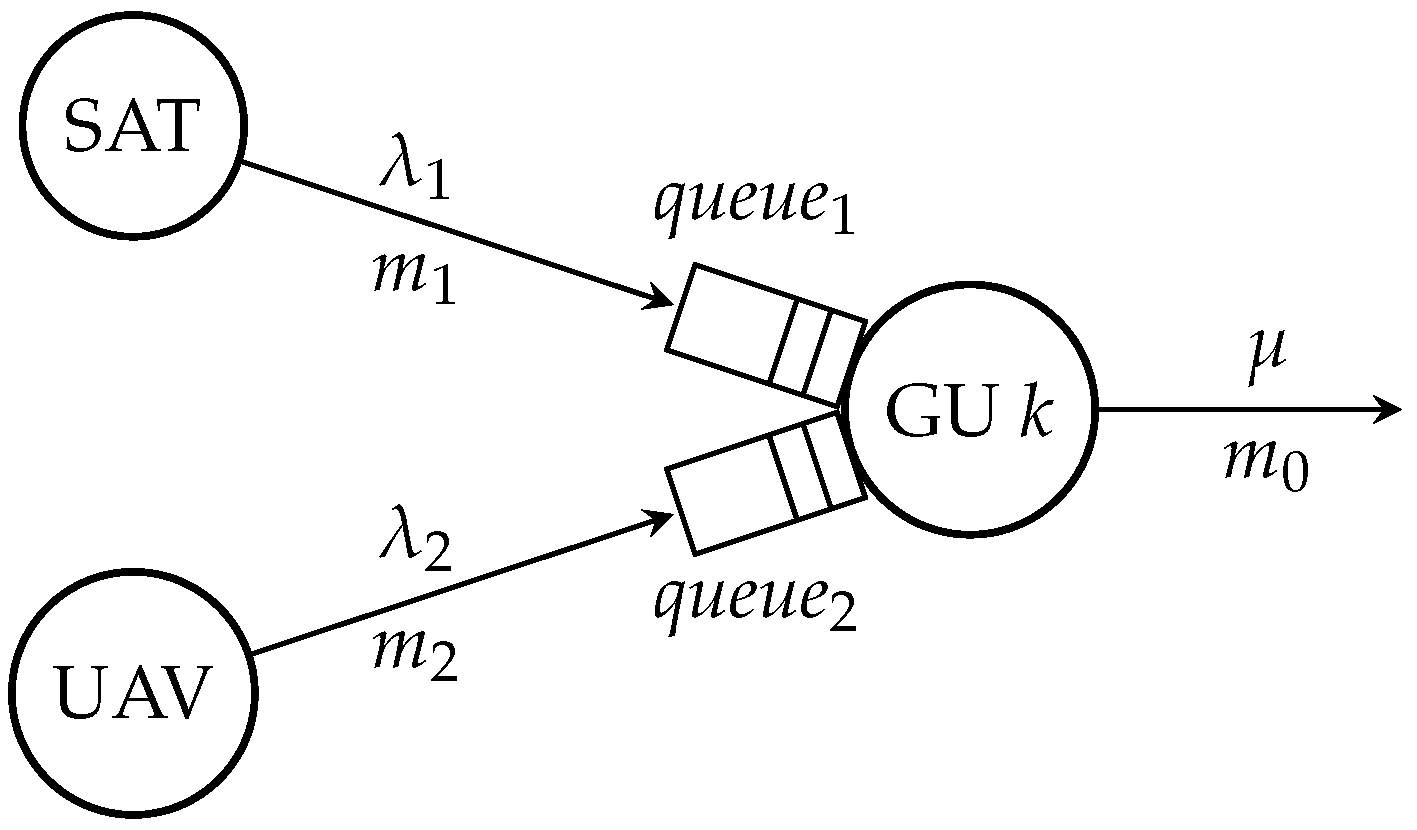
2.4. Queuing Disciplines
3. Derivation for MGF of AoI0
3.1. Preliminaries on SHS
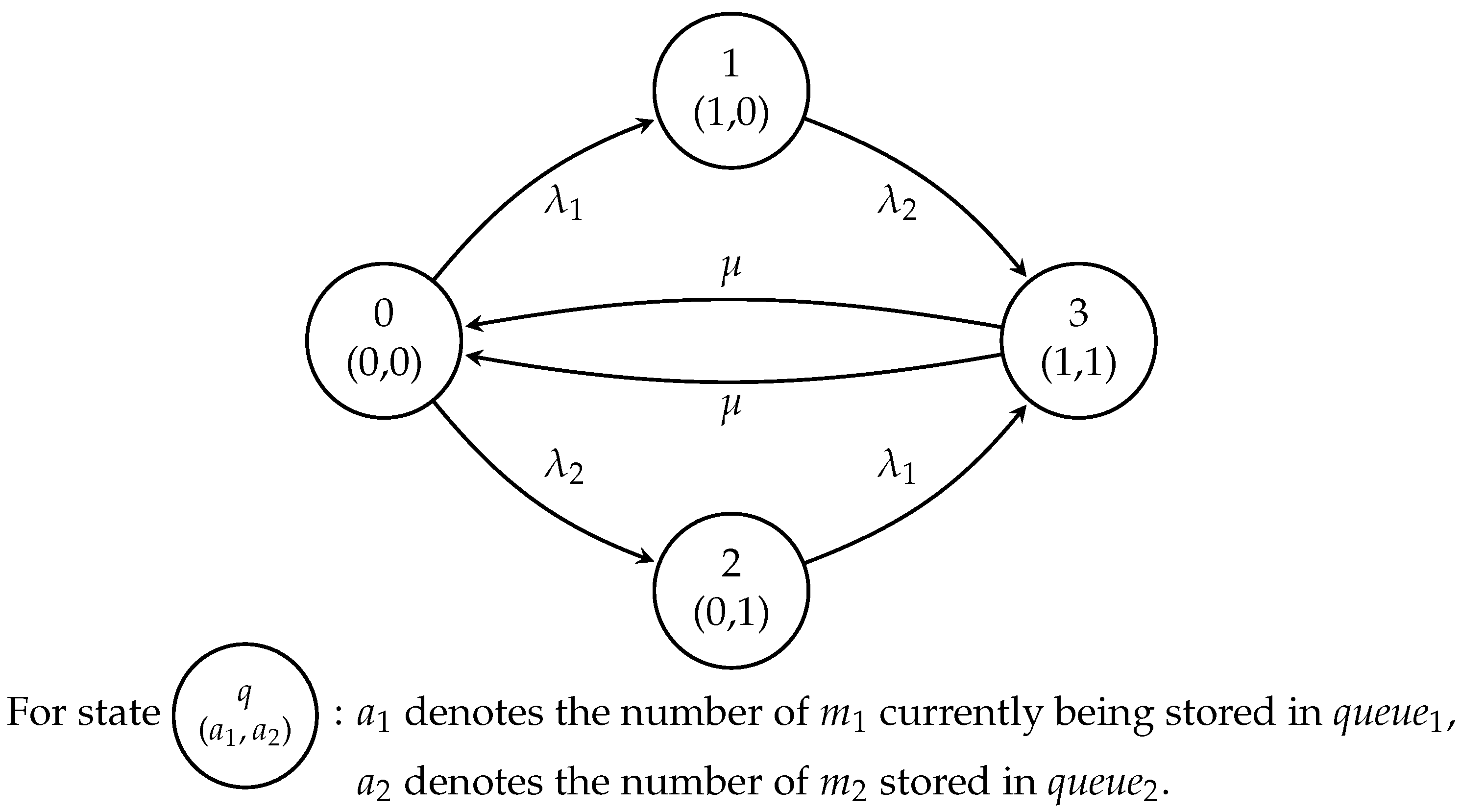
3.2. Calculate the MGF of AoI0 under LCFS-NP
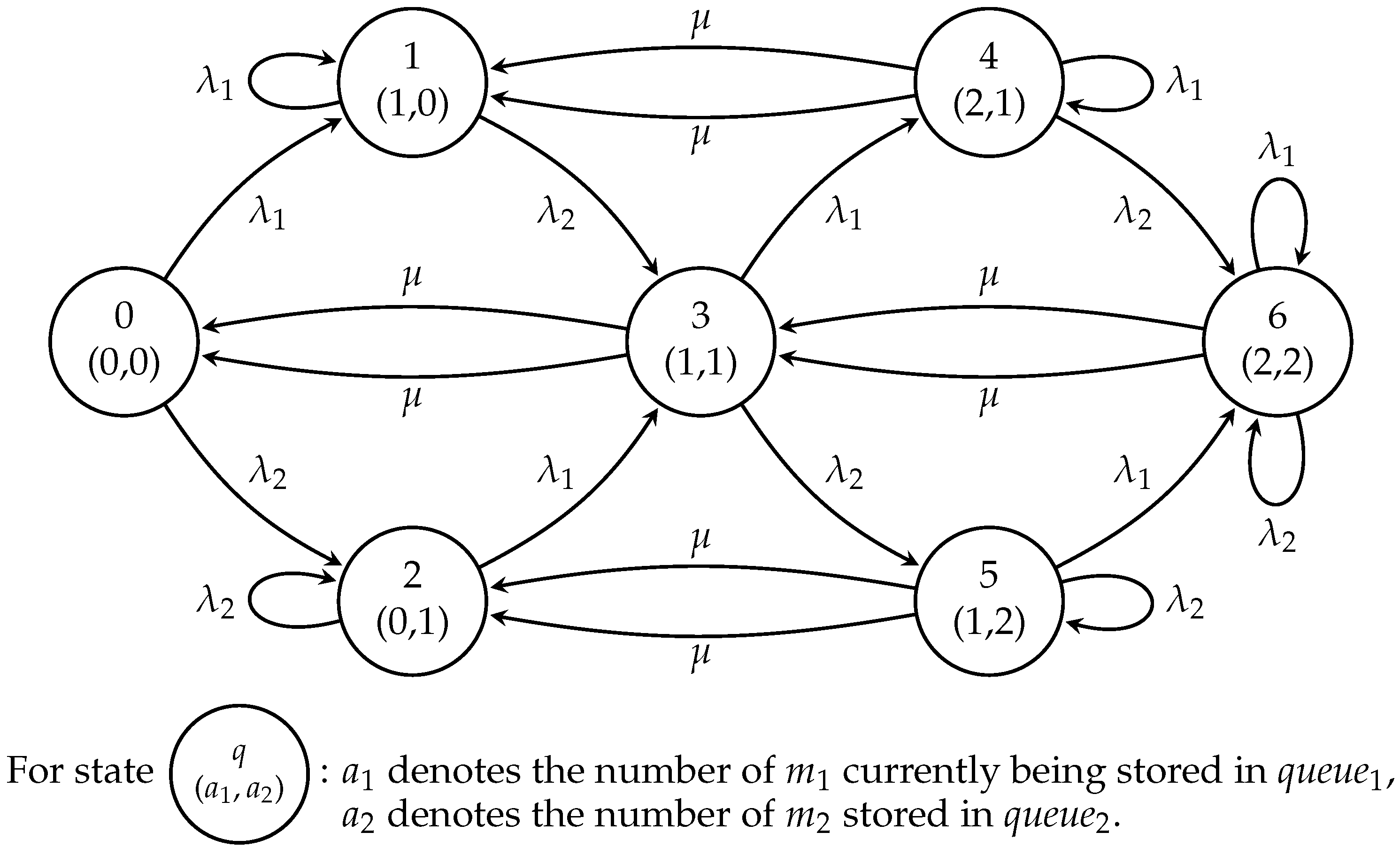
- or 2: In state 0, transition occurs when a new arrives at GU k. governs that because no new is generated at the end of state 0, because the new is fresh, and because is irrelevant in state 1. Similarly, the transition occurs when a new arrives. governs that , , and ;
- or 4: In state 1, the transition occurs when a new arrives at GU k. governs that , because no new is generated at the end of state 1, and because the new is fresh. Similarly, in state 2, the transition occurs when a new arrives. governs that , , and ;
- or 6: In state 3, the transition occurs when a new is generated by GU k and at the same instant. governs that and governs that {, } because the and stored in GU k are discarded when the new is generated. Similarly, the transition occurs when a new is generated and < at the same instant. governs that , , and .
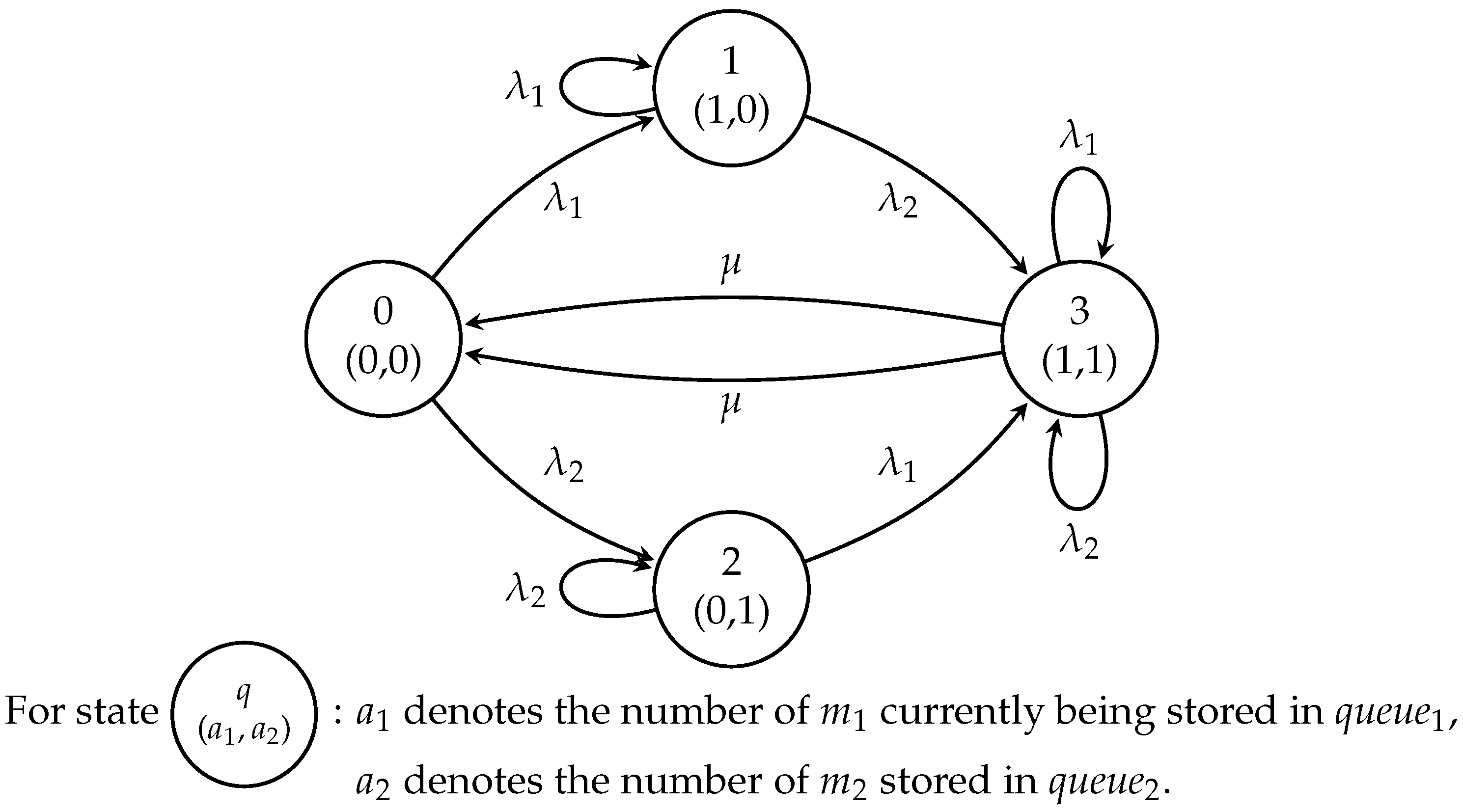
3.3. Calculate the MGF of AoI0 under LCFS-PS
- : The descriptions are same as the ones of the transitions in Table 1;
- or 8: In state 1, transition occurs when a new arrives at GU k. The new preempts the old one stored in queue1. governs that , because no new is generated when the transition occurs, because the new is fresh, and is due to the irrelevance of to state 1. Similarly, In state 2, the transition occurs when a new arrives, and the new preempts the old one stored in queue2. governs that , , and ;
- or 10: In state 3, transition occurs when a new arrives at GU k. The new preempts the old one stored in queue2. governs that , because no new is generated when the transition occurs, because the new is fresh, because is irrelevant to . Similarly, transition occurs when a new arrives. governs that , , and .
3.4. Calculate the MGF of AoI0 under LCFS-PW
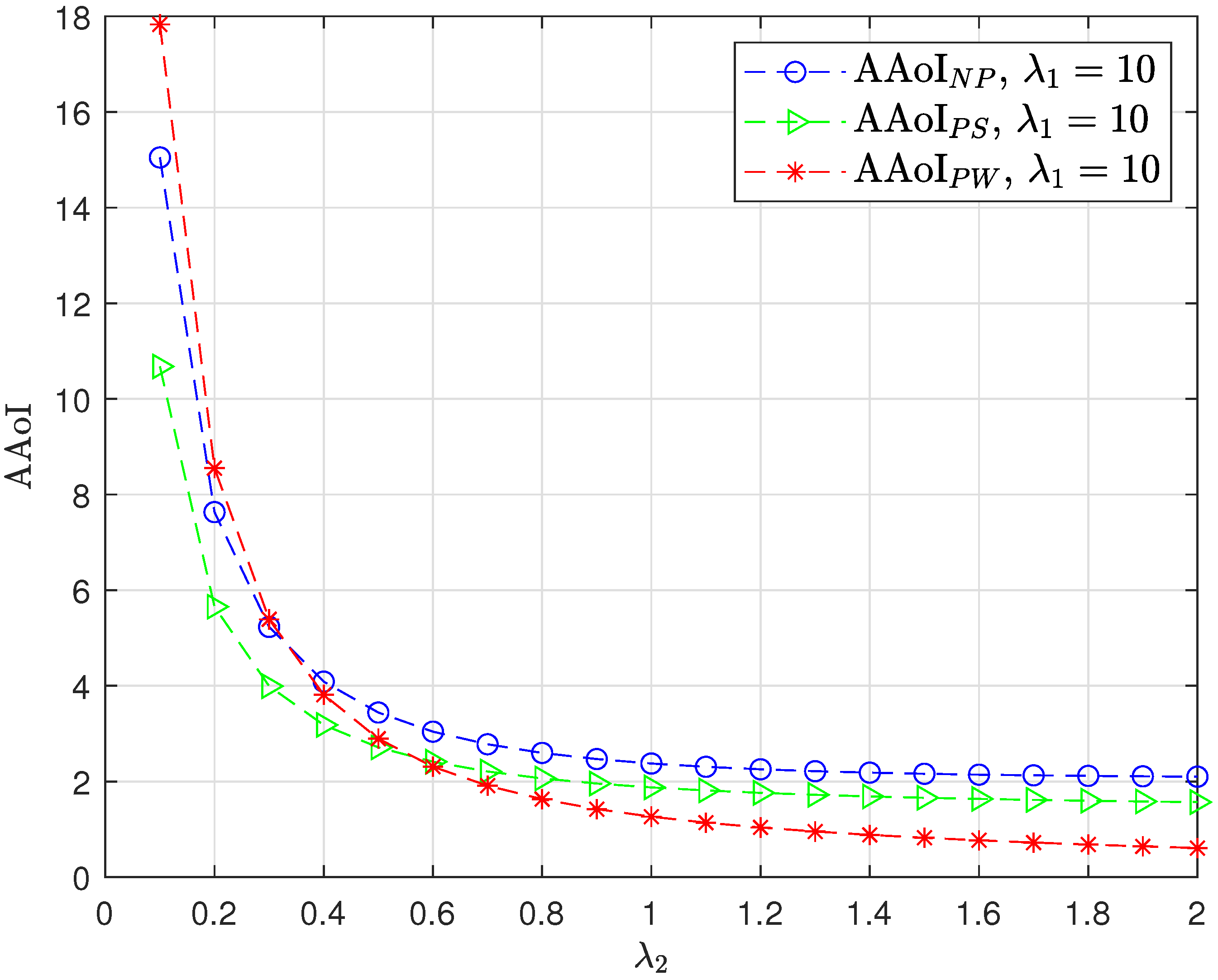
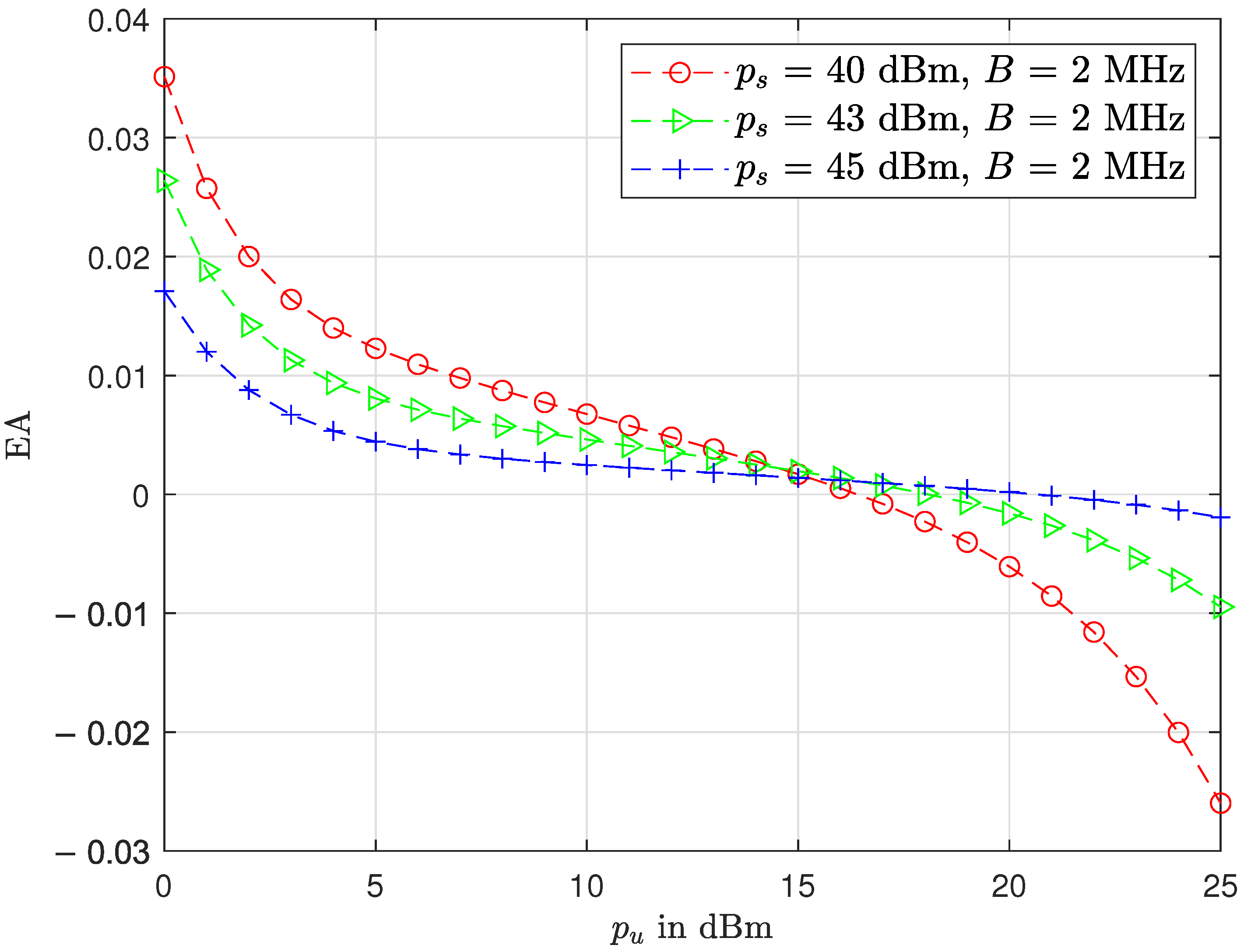
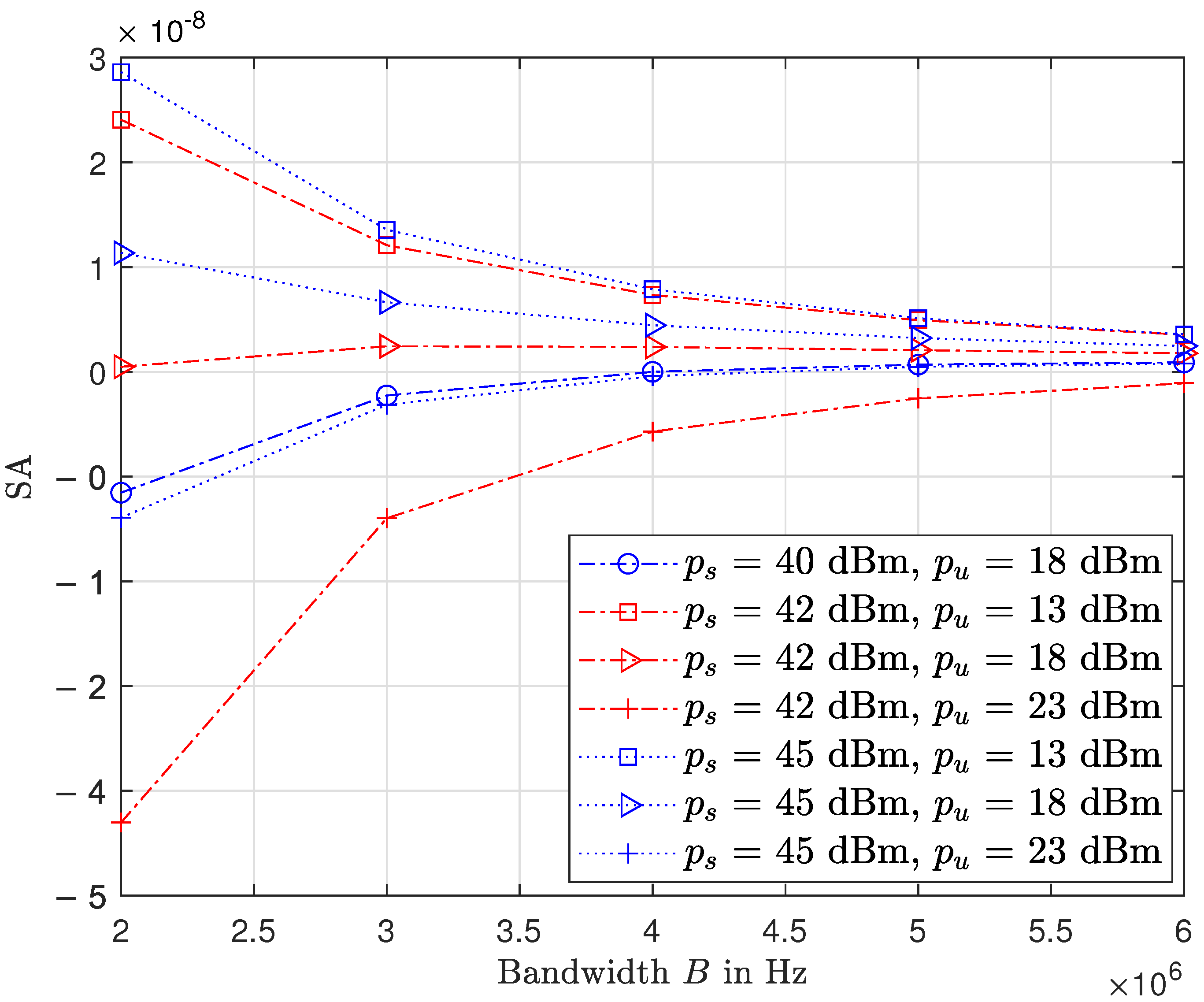
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lu, H.; Gui, Y.; Jiang, X.; Wu, F.; Chen, C.W. Compressed robust transmission for remote sensing services in space information networks. IEEE Wirel. Commun. 2019, 26, 46–54. [Google Scholar] [CrossRef]
- Zhu, X.; Jiang, C. Integrated satellite-terrestrial networks toward 6G: Architectures, applications, and challenges. IEEE Internet Things J. 2021, 9, 437–461. [Google Scholar] [CrossRef]
- Gui, J.; Cai, F. Coverage probability and throughput optimization in integrated mmWave and Sub-6 GHz multi-UAV-assisted disaster relief networks. IEEE Trans. Mob. Comput. 2024. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar]
- Lei, T.; Wang, J.; Li, X.; Wang, W.; Shao, C.; Liu, B. Flood disaster monitoring and emergency assessment based on multi-source remote sensing observations. Water 2022, 14, 2207. [Google Scholar] [CrossRef]
- Lei, T.; Cheng, H.; Li, A.; Qu, W.; Pang, Z.; Fu, J.; Li, L.; Li, X.; Lu, J. Cooperative emergency monitoring and assessment of flood disasters based on the integrated ground-air-space remote sensing. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 9733–9736. [Google Scholar]
- Zhou, B.; Saad, W. On the age of information in Internet of Things systems with correlated devices. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Sun, Y.; Uysal-Biyikoglu, E.; Yates, R.D.; Koksal, C.E.; Shroff, N.B. Update or wait: How to keep your data fresh. IEEE Trans. Inf. Theory 2017, 63, 7492–7508. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of information: An introduction and survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update? In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 2731–2735. [Google Scholar]
- Long, Y.; Zhao, S.; Gong, S.; Gu, B.; Niyato, D.; Shen, X. AoI-aware Sensing Scheduling and Trajectory Optimization for Multi-UAV-assisted Wireless Backscatter Networks. IEEE Trans. Veh. Technol. 2024. [Google Scholar] [CrossRef]
- Zhu, B.; Bedeer, E.; Nguyen, H.H.; Barton, R.; Gao, Z. UAV trajectory planning for AoI-minimal data collection in UAV-aided IoT networks by transformer. IEEE Trans. Wirel. Commun. 2022, 22, 1343–1358. [Google Scholar] [CrossRef]
- Li, M.; Jia, G.; Li, X.; Qiu, H. Efficient Trajectory Planning for Optimizing Energy Consumption and Completion Time in UAV-Assisted IoT Networks. Mathematics 2023, 11, 4399. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y.; Li, N.; Song, X. AoI-minimal task assignment and trajectory optimization in multi-UAV-assisted IoT networks. IEEE Internet Things J. 2022, 9, 21777–21791. [Google Scholar] [CrossRef]
- Samir, M.; Assi, C.; Sharafeddine, S.; Ghrayeb, A. Online altitude control and scheduling policy for minimizing AoI in UAV-assisted IoT wireless networks. IEEE Trans. Mob. Comput. 2020, 21, 2493–2505. [Google Scholar] [CrossRef]
- Ngo, Q.T.; Tang, Z.; Jayawickrama, B.; He, Y.; Dutkiewicz, E.; Senanayake, B. Timeliness of Information in 5G Non-Terrestrial Networks: A Survey. IEEE Internet Things J. 2024. [Google Scholar] [CrossRef]
- Yuan, A.; Hu, Z.; Zhang, Q.; Sun, Z.; Yang, Z. Towards the age in Cislunar Communication: An AoI-Optimal Multi-Relay Constellation with Heterogeneous Orbits. IEEE J. Sel. Areas Commun. 2024, 42, 1420–1435. [Google Scholar] [CrossRef]
- Kaul, S.; Gruteser, M.; Rai, V.; Kenney, J. Minimizing age of information in vehicular networks. In Proceedings of the 2011 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, Salt Lake City, UT, USA, 27–30 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 350–358. [Google Scholar]
- Popovski, P.; Chiariotti, F.; Huang, K.; Kalør, A.E.; Kountouris, M.; Pappas, N.; Soret, B. A perspective on time toward wireless 6G. Proc. IEEE 2022, 110, 1116–1146. [Google Scholar] [CrossRef]
- Kosta, A.; Pappas, N.; Angelakis, V. Age of information: A new concept, metric, and tool. Found. Trends Netw. 2017, 12, 162–259. [Google Scholar] [CrossRef]
- Costa, M.; Codreanu, M.; Ephremides, A. Age of information with packet management. In Proceedings of the 2014 IEEE International Symposium on Information Theory, Honolulu, HI, USA, 29 June–4 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1583–1587. [Google Scholar]
- Costa, M.; Codreanu, M.; Ephremides, A. On the age of information in status update systems with packet management. IEEE Trans. Inf. Theory 2016, 62, 1897–1910. [Google Scholar] [CrossRef]
- Kam, C.; Kompella, S.; Ephremides, A. Age of information under random updates. In Proceedings of the 2013 IEEE International Symposium on Information Theory, Istanbul, Turkey, 7–12 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 66–70. [Google Scholar]
- Kam, C.; Kompella, S.; Nguyen, G.D.; Ephremides, A. Effect of message transmission path diversity on status age. IEEE Trans. Inf. Theory 2015, 62, 1360–1374. [Google Scholar] [CrossRef]
- Yates, R.D. Status updates through networks of parallel servers. In Proceedings of the 2018 IEEE International Symposium on Information Theory (ISIT), Vail, CO, USA, 17–22 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2281–2285. [Google Scholar]
- Yates, R.D.; Kaul, S.K. The age of information: Real-time status updating by multiple sources. IEEE Trans. Inf. Theory 2018, 65, 1807–1827. [Google Scholar] [CrossRef]
- Najm, E.; Telatar, E. Status updates in a multi-stream M/G/1/1 preemptive queue. In Proceedings of the IEEE Infocom 2018-IEEE Conference On Computer Communications Workshops (Infocom Wkshps), Honolulu, HI, USA, 15–19 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 124–129. [Google Scholar]
- Moltafet, M.; Leinonen, M.; Codreanu, M. On the age of information in multi-source queueing models. IEEE Trans. Commun. 2020, 68, 5003–5017. [Google Scholar] [CrossRef]
- Kaul, S.K.; Yates, R.D. Timely updates by multiple sources: The M/M/1 queue revisited. In Proceedings of the 2020 54th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 18–20 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Maatouk, A.; Assaad, M.; Ephremides, A. Age of information with prioritized streams: When to buffer preempted packets? In Proceedings of the 2019 IEEE International Symposium on Information Theory (ISIT), Paris, France, 7–12 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 325–329. [Google Scholar]
- Chiang, Y.H.; Lin, H.; Ji, Y. Information cofreshness-aware grant assignment and transmission scheduling for internet of things. IEEE Internet Things J. 2021, 8, 14435–14446. [Google Scholar] [CrossRef]
- Pan, W.; Deng, Z.; Wang, X.; Zhou, P.; Wu, W. Optimizing the age of information for multi-source information update in Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022, 9, 904–917. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, Y.; Zhao, J.; Ni, W. Request oriented cache update for age of information minimization in industrial control systems. In Proceedings of the ICC 2023-IEEE International Conference on Communications, Rome, Italy, 28 May–1 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1774–1779. [Google Scholar]
- Gao, Z.; Liu, A.; Liang, X. Data transmission time minimization for LEO satellite-terrestrial integrated networks. In Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 21–23 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 642–647. [Google Scholar]
- Han, C.; Liu, A.; Wang, H.; Huo, L.; Liang, X. Dynamic anti-jamming coalition for satellite-enabled army IoT: A distributed game approach. IEEE Internet Things J. 2020, 7, 10932–10944. [Google Scholar] [CrossRef]
- Huang, Q.; Lin, M.; Wang, J.B.; Tsiftsis, T.A.; Wang, J. Energy efficient beamforming schemes for satellite-aerial-terrestrial networks. IEEE Trans. Commun. 2020, 68, 3863–3875. [Google Scholar] [CrossRef]
- Zheng, G.; Chatzinotas, S.; Ottersten, B. Generic optimization of linear precoding in multibeam satellite systems. IEEE Trans. Wirel. Commun. 2012, 11, 2308–2320. [Google Scholar] [CrossRef]
- Guo, K.; Lin, M.; Zhang, B.; Zhu, W.P.; Wang, J.B.; Tsiftsis, T.A. On the performance of LMS communication with hardware impairments and interference. IEEE Trans. Commun. 2018, 67, 1490–1505. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- He, H.; Zhang, S.; Zeng, Y.; Zhang, R. Joint altitude and beamwidth optimization for UAV-enabled multiuser communications. IEEE Commun. Lett. 2017, 22, 344–347. [Google Scholar] [CrossRef]
- Balanis, C.A. Antenna Theory: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Lei, L.; Xu, H.; Xiong, X.; Zheng, K.; Xiang, W. Joint computation offloading and multiuser scheduling using approximate dynamic programming in NB-IoT edge computing system. IEEE Internet Things J. 2019, 6, 5345–5362. [Google Scholar] [CrossRef]
- Inoue, Y.; Masuyama, H.; Takine, T.; Tanaka, T. A general formula for the stationary distribution of the age of information and its application to single-server queues. IEEE Trans. Inf. Theory 2019, 65, 8305–8324. [Google Scholar] [CrossRef]
- Yates, R.D. The age of information in networks: Moments, distributions, and sampling. IEEE Trans. Inf. Theory 2020, 66, 5712–5728. [Google Scholar] [CrossRef]
- 3GPP, Solutions for NR to Support Non-Terrestrial Networks (NTN). 3rd Generation Partnership Project (3GPP), Technical Report (TR) 38.821, May 2021, Version 16.1.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3525 (accessed on 27 July 2024).
- Palacios, J.; González-Prelcic, N.; Mosquera, C.; Shimizu, T.; Wang, C.H. A hybrid beamforming design for massive MIMO LEO satellite communications. Front. Space Technol. 2021, 2, 696464. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l | ||||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 |
| l | ||||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 |
| l | ||||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 | ||||
| 10 | ||||
| 11 | ||||
| 12 | ||||
| 13 | ||||
| 14 | ||||
| 15 | ||||
| 16 | ||||
| 17 | ||||
| 18 | ||||
| 19 | ||||
| 20 | ||||
| 21 | ||||
| 22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhang, X.; Qin, K.; Wang, Z.; Zhou, J.; Song, D. AoI Analysis of Satellite–UAV Synergy Real-Time Remote Sensing System. Remote Sens. 2024, 16, 3305. https://doi.org/10.3390/rs16173305
Wang L, Zhang X, Qin K, Wang Z, Zhou J, Song D. AoI Analysis of Satellite–UAV Synergy Real-Time Remote Sensing System. Remote Sensing. 2024; 16(17):3305. https://doi.org/10.3390/rs16173305
Chicago/Turabian StyleWang, Libo, Xiangyin Zhang, Kaiyu Qin, Zhuwei Wang, Jiayi Zhou, and Deyu Song. 2024. "AoI Analysis of Satellite–UAV Synergy Real-Time Remote Sensing System" Remote Sensing 16, no. 17: 3305. https://doi.org/10.3390/rs16173305
APA StyleWang, L., Zhang, X., Qin, K., Wang, Z., Zhou, J., & Song, D. (2024). AoI Analysis of Satellite–UAV Synergy Real-Time Remote Sensing System. Remote Sensing, 16(17), 3305. https://doi.org/10.3390/rs16173305