
A Texture-Considerate Convolutional Neural Network Approach for Color Consistency in Remote Sensing Imagery



Abstract

1. Introduction
2. Materials and Methods
2.1. Overview of the Proposed Method
2.2. Color Mapping Network
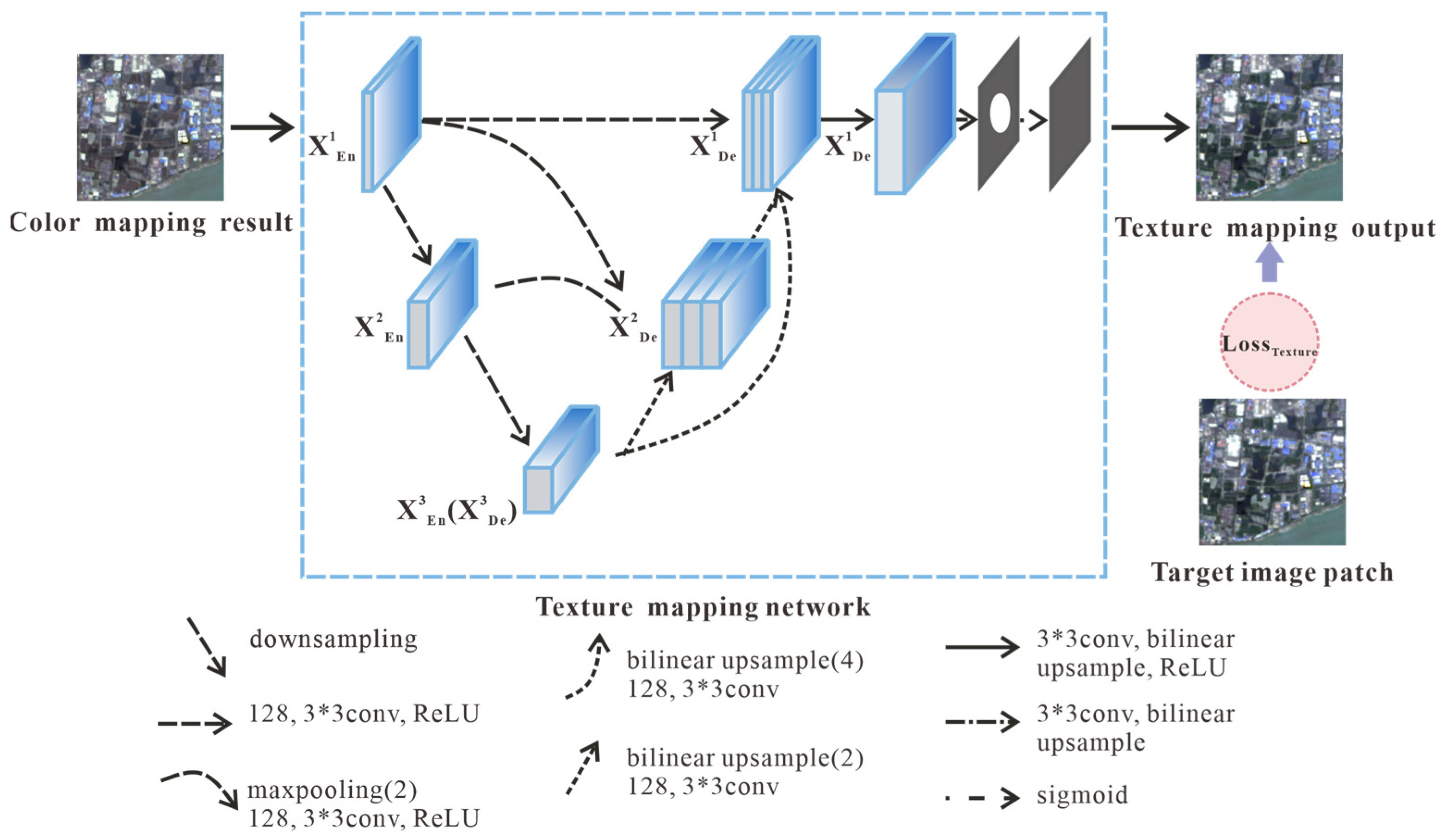
2.3. Texture Mapping Network
2.4. Comprehensive Loss Function
2.5. Experiments
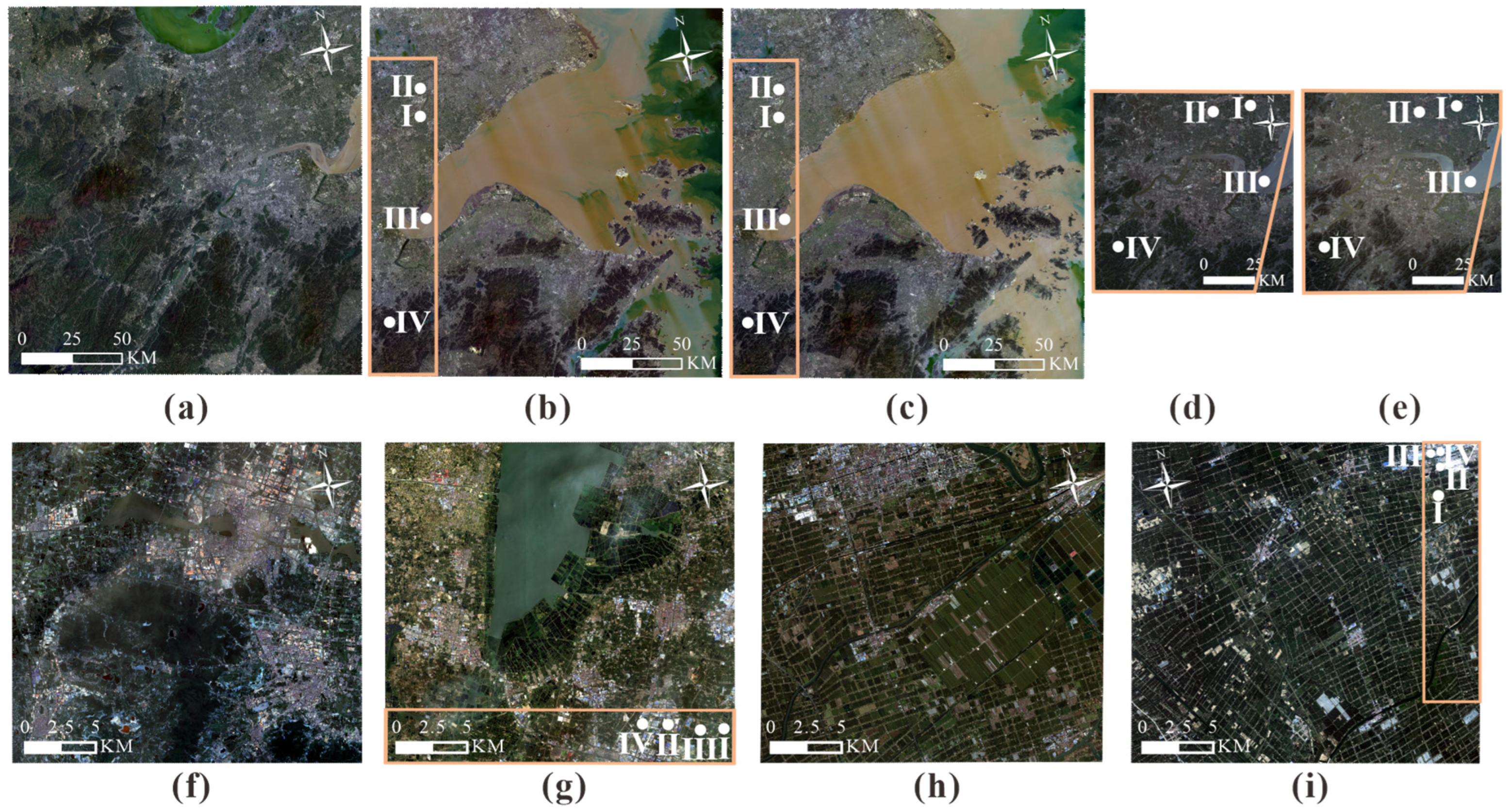
2.5.1. Experimental Design
2.5.2. Comparative Methods and Experimental Environment
2.5.3. Evaluation Metrics
2.5.4. Experimental Data and Procedure
3. Results and Discussion
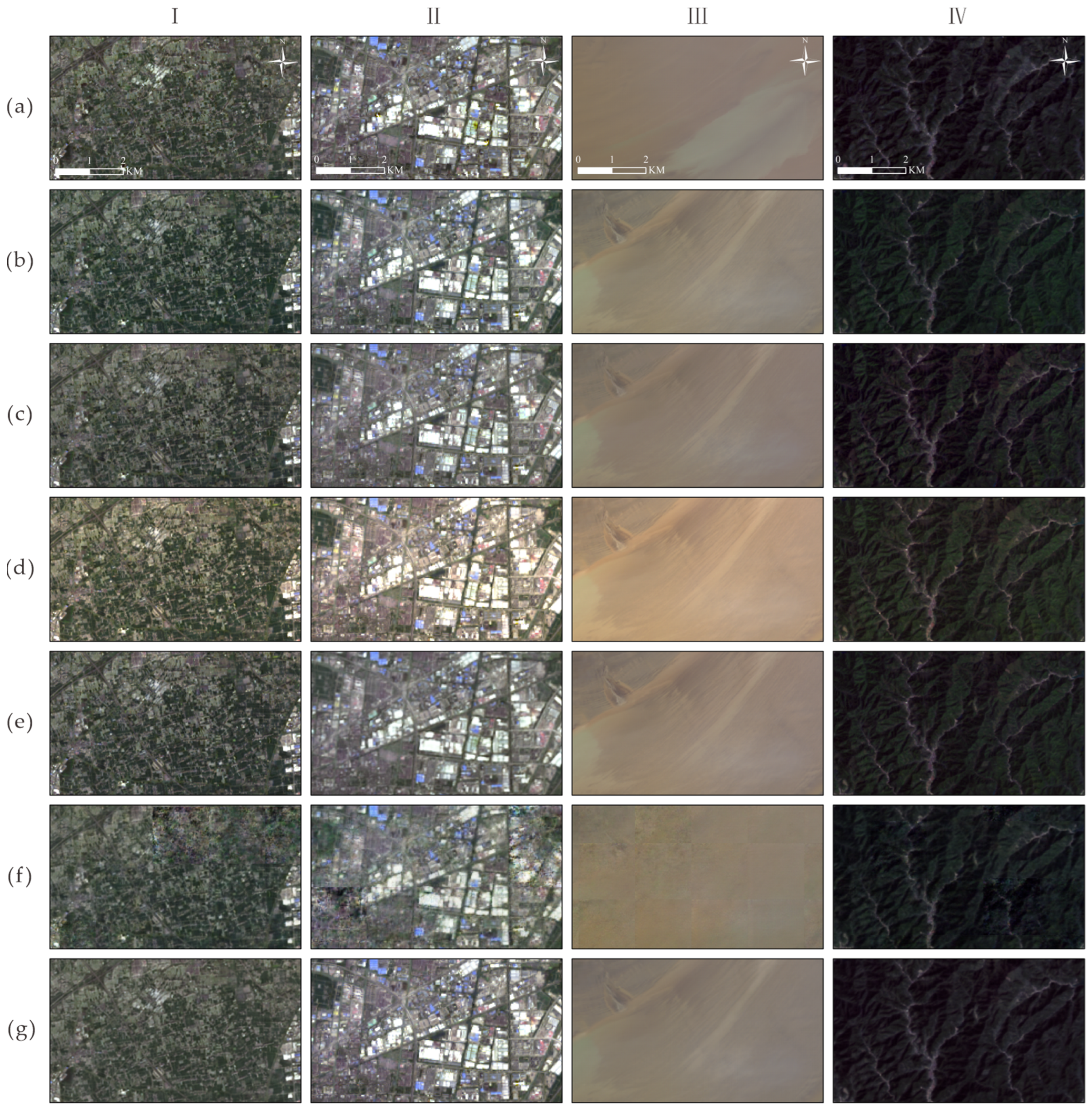
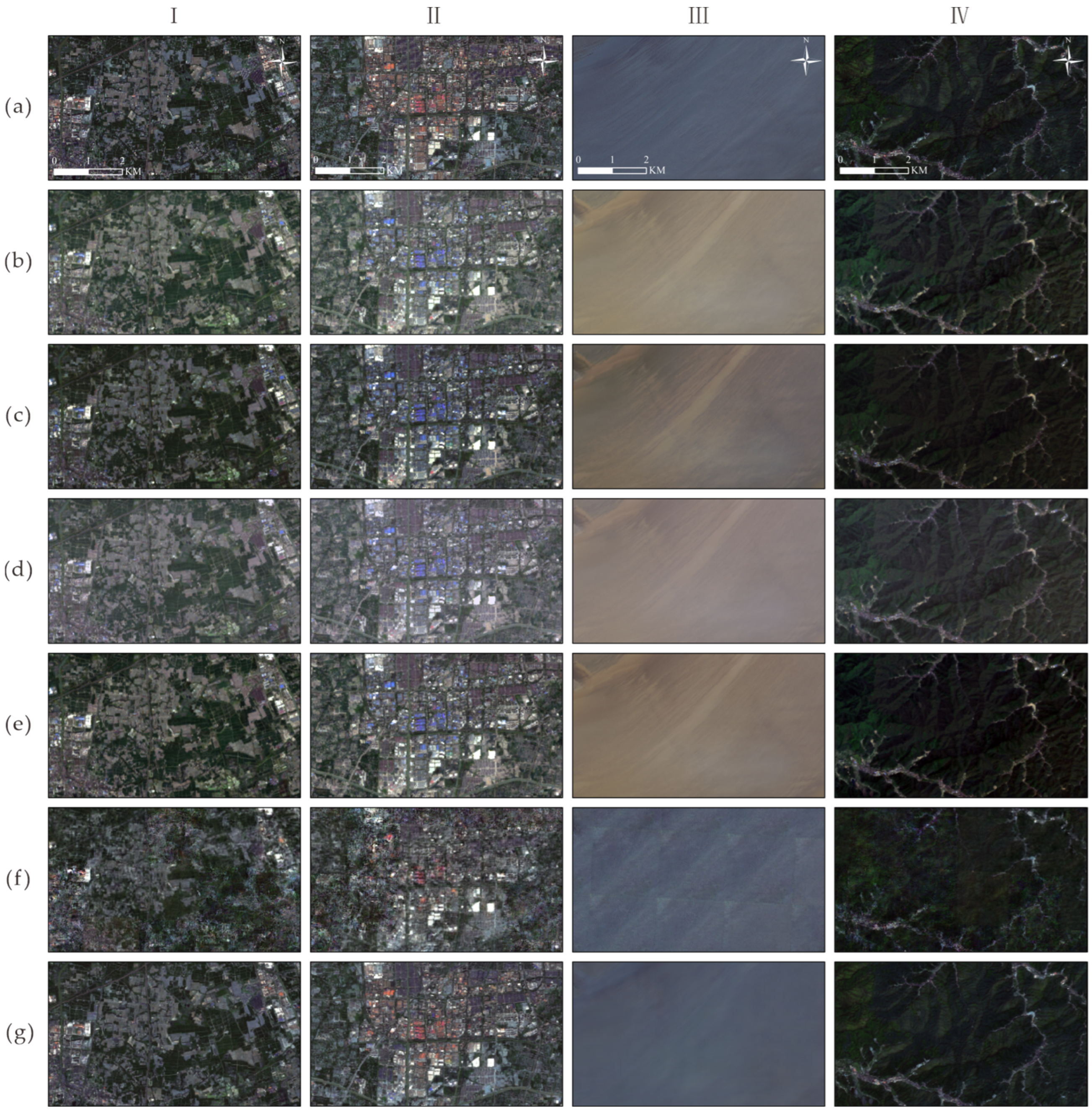
3.1. Comparison of the Same Sensors with Small Temporal Differences
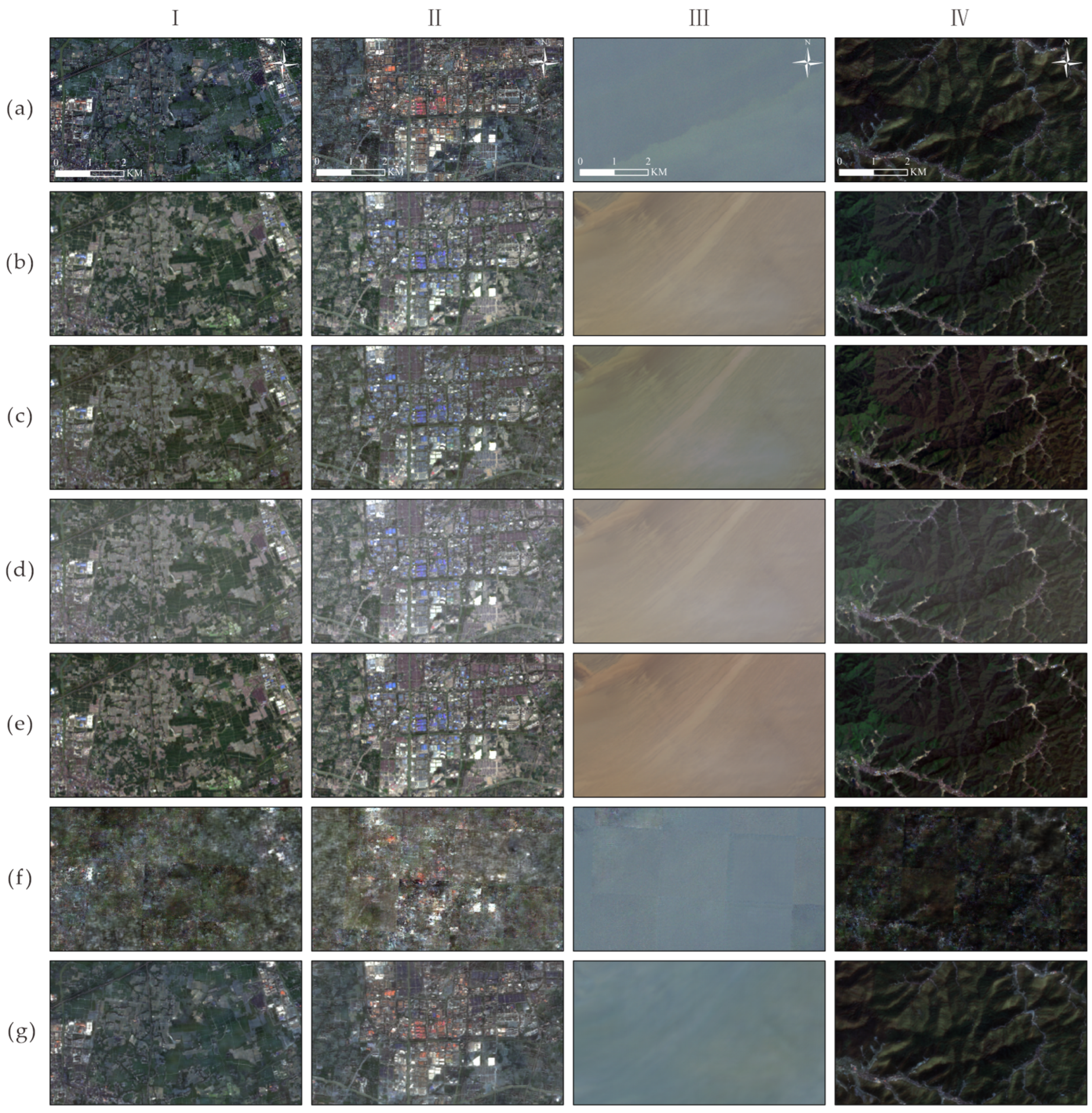
3.2. Comparison of the Same Sensors with Large Temporal Differences
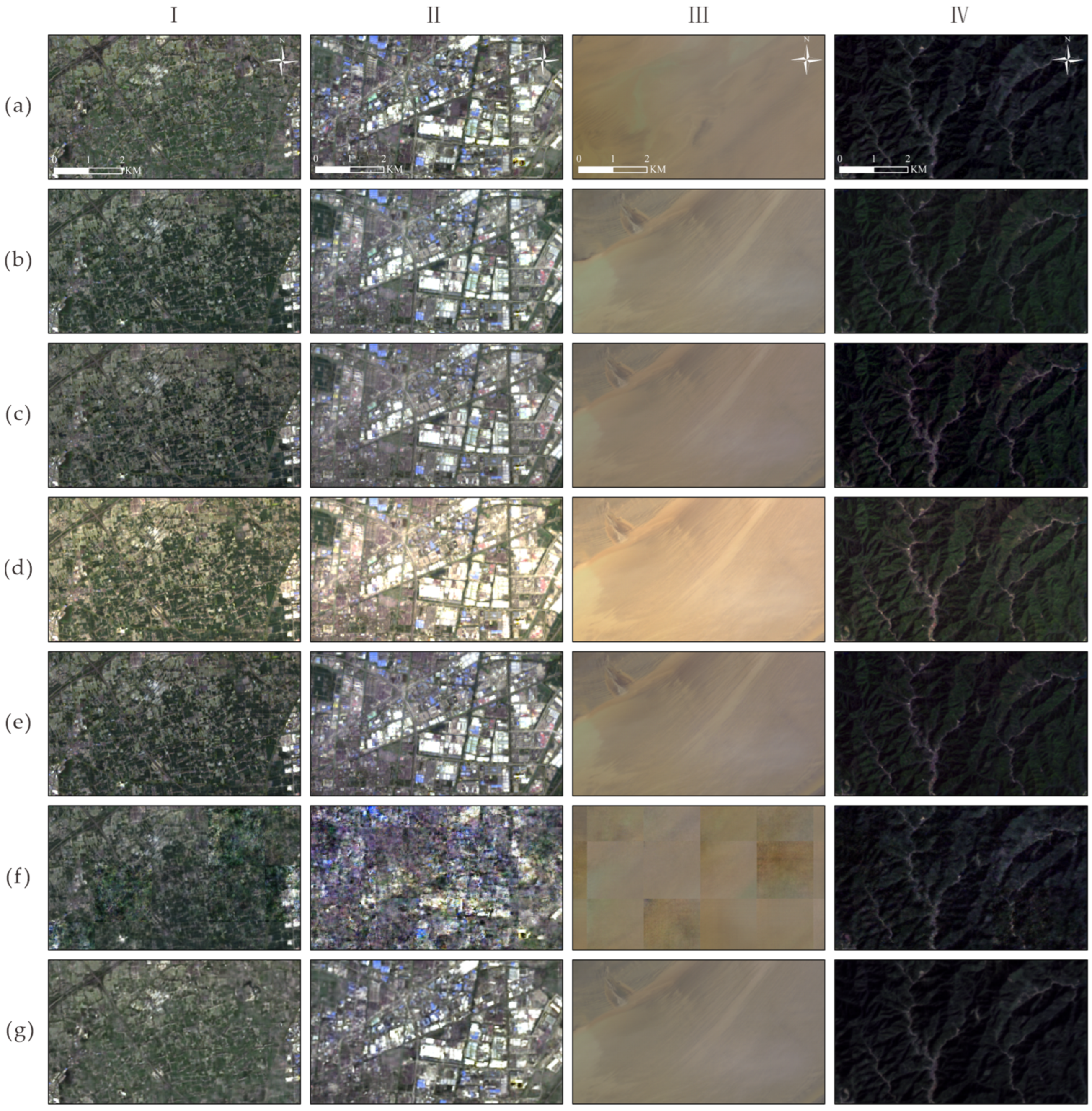
3.3. Comparison of Different Sensors with Small Temporal Differences
3.4. Comparison of Different Sensors with Large Temporal Differences
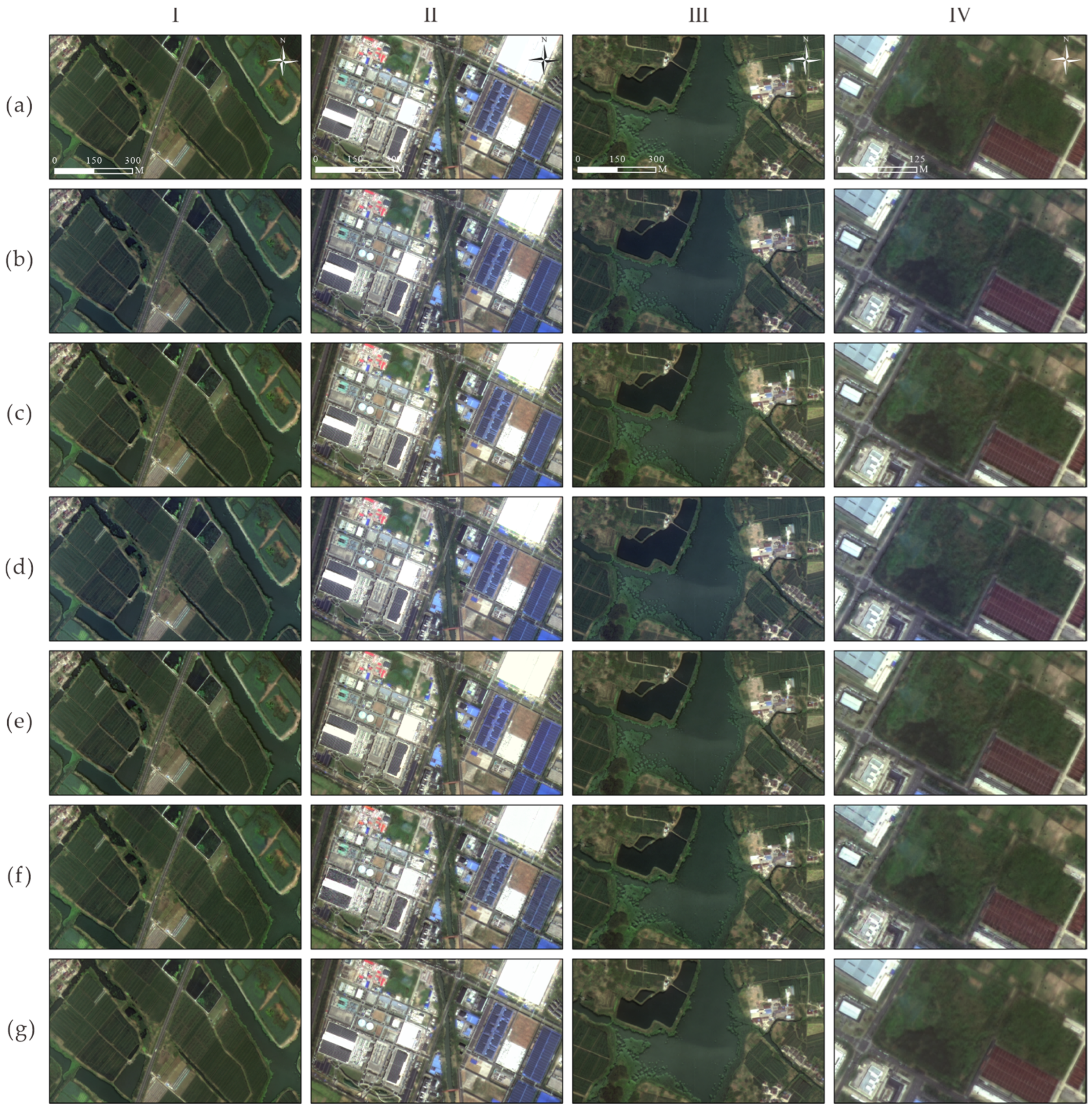
3.5. Comparison of High-Resolution Sensor with Small Temporal Differences
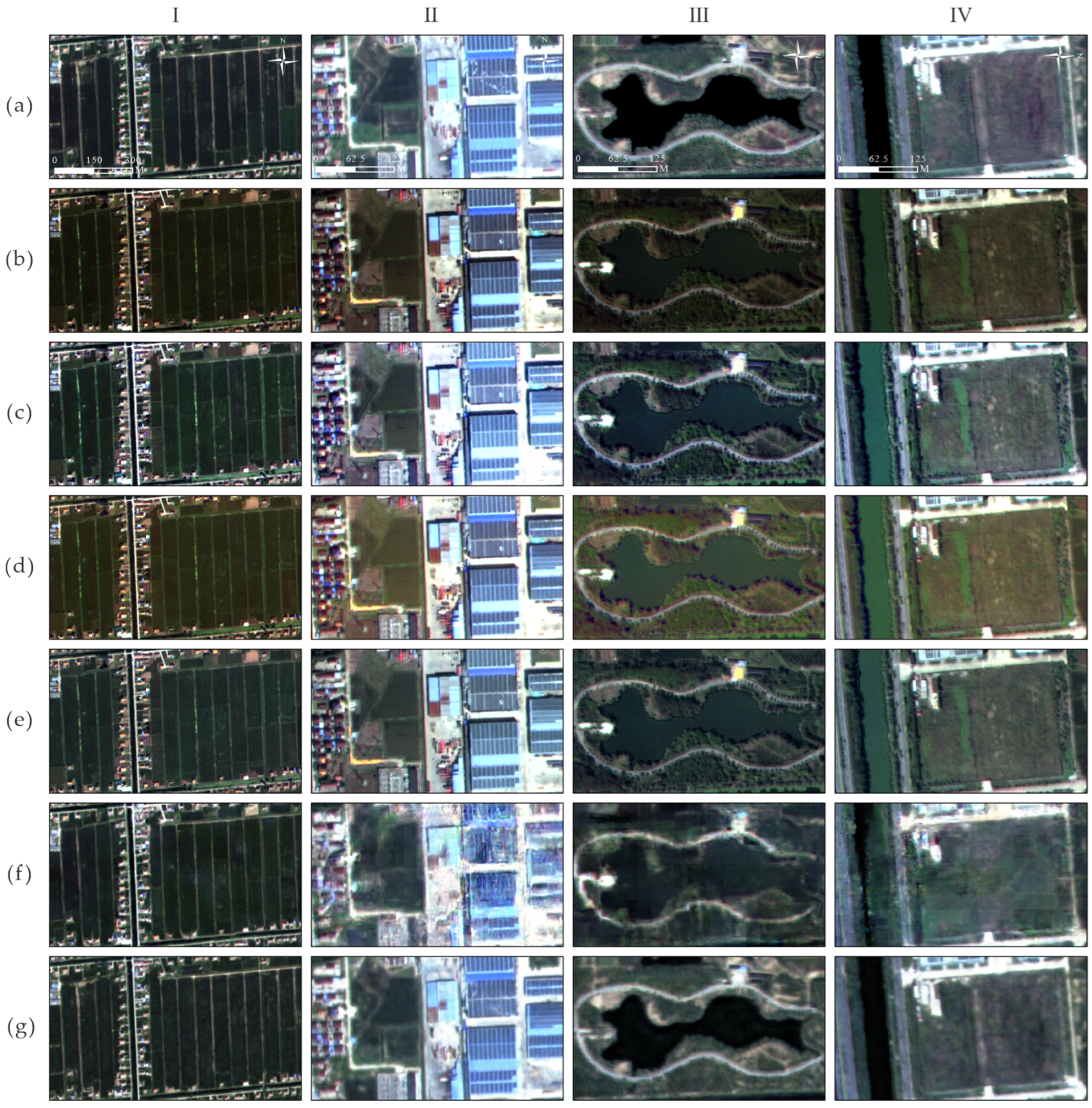
3.6. Comparison of High-Resolution Sensor with Large Temporal Differences
3.7. Case Study
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, G.; Lei, J.; Xie, W. Algorithm/Hardware Codesign for Real-Time On-Satellite CNN-Based Ship Detection in SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Rees, M.J. On the Future: A Keynote Address. Engineering 2020, 6, 110–114. [Google Scholar] [CrossRef]
- Gao, Y.; Zheng, N.; Wang, C. Global Change Study and Remote Sensing Technology. Geo-Inf. Sci. 2000, 2, 42–46. [Google Scholar]
- Gonçalves, J.A.; Henriques, R. UAV Photogrammetry for Topographic Monitoring of Coastal Areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Plaza, A.; Camps-Valls, G. Hyperspectral Remote Sensing Data Analysis and Future Challenges. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–36. [Google Scholar] [CrossRef]
- Hansen, M.C.; Loveland, T.R. A Review of Large Area Monitoring of Land Cover Change using Landsat Data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Zhang, W.; Li, X.; Yu, J. Remote Sensing Image Mosaic Technology Based on SURF Algorithm in Agriculture. EURASIP J. Image Video Process. 2018, 2018, 85. [Google Scholar] [CrossRef]
- Wang, W.; Wen, D. Review of Dodging Algorithm of Remote Sensing Image. Jiangsu Sci. Technol. Inf. 2017, 6, 51–55. [Google Scholar]
- Li, Y.; Yin, H.; Yao, J. A Unified Probabilistic Framework of Robust and Efficient Color Consistency Correction for Multiple Images. ISPRS J. Photogramm. Remote Sens. 2022, 190, 1–24. [Google Scholar] [CrossRef]
- Schroeder, T.A.; Cohen, W.B.; Song, C. Radiometric Correction of Multi-temporal Landsat Data for Characterization of Early Successional Forest Patterns in Western Oregon. Remote Sens. Environ. 2006, 103, 16–26. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, H.; Zhou, C. A Color Consistency Processing Method for HY-1C Images of Antarctica. Remote Sens. 2020, 12, 1143. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.; Zhang, J. The Image Matching Based on Wallis Filtering. J. Wuhan Tech. Univ. Surv. Mapp. 1999, 1, 24–27. [Google Scholar]
- Li, D.; Wang, M.; Pan, J. Auto-dodging Processing and Its Application for Optical RS Images. Geomat. Inf. Sci. Wuhan Univ. 2006, 9, 753–756. [Google Scholar]
- Yeganeh, H.; Ziaei, A.; Rezaie, A. A Novel Approach for Contrast Enhancement Based on Histogram Equalization. In Proceedings of the International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 13–15 May 2008; pp. 256–260. [Google Scholar]
- Jensen, J.R. Introductory Digital Image Processing: A Remote Sensing Perspective, 2nd ed.; Prentice Hall: Hoboken, NJ, USA, 1996; pp. 107–192. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 3rd ed.; Person Prentice Hall: Hoboken, NJ, USA, 2008; pp. 120–139. [Google Scholar]
- Bockstein, I.M. Color Equalization Method and Its Application to Color Image Processing. J. Opt. Soc. Am. A 1986, 3, 735–737. [Google Scholar] [CrossRef]
- Buzuloiu, V.V. Adaptive-neighborhood Histogram Equalization of Color Images. J. Electron. Imaging 2001, 10, 445–459. [Google Scholar] [CrossRef]
- Acharya, T.; Ray, A.K. Image Processing: Principles and Applications; Wiley-Interscience: Hoboken, NJ, USA, 2005; pp. 110–114. [Google Scholar]
- Xia, M.; Yao, J.; Gao, Z. A Closed-form Solution for Multi-view Color Correction with Gradient Preservation. ISPRS J. Photogramm. Remote Sens. 2019, 157, 188–200. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, L.; Sun, M. A Mixed Radiometric Normalization Method for Mosaicking of High-Resolution Satellite Imagery. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2972–2984. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, C.; Du, B. Automatic Radiometric Normalization for Multitemporal Remote Sensing Imagery with Iterative Slow Feature Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6141–6155. [Google Scholar] [CrossRef]
- Xia, M.; Yao, J.; Xie, R. Color Consistency Correction Based on Remapping Optimization for Image Stitching. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; pp. 2977–2984. [Google Scholar]
- Gatys, L.A.; Ecker, A.S.; Bethge, M. A Neural Algorithm of Artistic Style. J. Vis. 2016, 16, 326. [Google Scholar] [CrossRef]
- Tasar, O.; Happy, S.L.; Tarabalka, Y. ColorMapGAN: Unsupervised Domain Adaptation for Semantic Segmentation Using Color Mapping Generative Adversarial Networks. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7178–7193. [Google Scholar] [CrossRef]
- Benjdira, B.; Bazi, Y.; Koubaa, A. Unsupervised Domain Adaptation using Generative Adversarial Networks for Semantic Segmentation of Aerial Images. Remote Sens. 2019, 11, 1369. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, Q. Multi-temporal Remote Sensing Imagery Semantic Segmentation Color Consistency Adversarial Network. Acta Geod. Cartogr. Sin. 2020, 49, 1473–1484. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Plans | Target Images | Reference Images |
|---|---|---|
| Same sensor with small temporal differences | Landsat 8 OLI, 7 April 2022 | Landsat 8 OLI, 15 March 2022 |
| Same sensor with large temporal differences | Landsat 8 OLI, 7 April 2022 | Landsat 8 OLI, 22 February 2020 |
| Different sensors with small temporal differences | Landsat 8 OLI, 7 April 2022 | Sentinel 2 MSI, 8 April 2022 |
| Different sensors with large temporal differences | Landsat 8 OLI, 7 April 2022 | Sentinel 2 MSI, 27 February 2022 |
| High-resolution sensor with small temporal differences | GF 2, 14 July 2022 | GF 2, 14 July 2022 |
| High-resolution sensor with large temporal differences | GF 2, 1 October 2023 | GF 2, 21 April 2023 |
| Experimental Plans | Histogram Matching | Wallis Filtering | Xia et al.’s Method [20] | CycleGAN | Proposed Method |
|---|---|---|---|---|---|
| Same sensor with small temporal differences | 0.3954 | 0.6703 | 0.2956 | 0.5650 | 0.2663 |
| Same sensor with large temporal differences | 0.2767 | 0.7204 | 0.2363 | 0.3715 | 0.1343 |
| Different sensors with small temporal differences | 0.2931 | 0.6669 | 0.3552 | 0.4994 | 0.2501 |
| Different sensors with large temporal differences | 0.3792 | 0.7983 | 0.3431 | 0.4374 | 0.3097 |
| High-resolution sensor with small temporal differences | 0.6258 | 0.4624 | 0.2770 | 0.4958 | 0.2650 |
| High-resolution sensor with large temporal differences | 0.5407 | 0.6114 | 0.5632 | 0.4966 | 0.3447 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, X.; Su, C.; Wang, S.; Xu, Z.; Zhang, X. A Texture-Considerate Convolutional Neural Network Approach for Color Consistency in Remote Sensing Imagery. Remote Sens. 2024, 16, 3269. https://doi.org/10.3390/rs16173269
Qian X, Su C, Wang S, Xu Z, Zhang X. A Texture-Considerate Convolutional Neural Network Approach for Color Consistency in Remote Sensing Imagery. Remote Sensing. 2024; 16(17):3269. https://doi.org/10.3390/rs16173269
Chicago/Turabian StyleQian, Xiaoyuan, Cheng Su, Shirou Wang, Zeyu Xu, and Xiaocan Zhang. 2024. "A Texture-Considerate Convolutional Neural Network Approach for Color Consistency in Remote Sensing Imagery" Remote Sensing 16, no. 17: 3269. https://doi.org/10.3390/rs16173269
APA StyleQian, X., Su, C., Wang, S., Xu, Z., & Zhang, X. (2024). A Texture-Considerate Convolutional Neural Network Approach for Color Consistency in Remote Sensing Imagery. Remote Sensing, 16(17), 3269. https://doi.org/10.3390/rs16173269