
Moving Real-Target Imaging of a Beam-Broaden ISAL Based on Orthogonal Polarization Receiver and Along-Track Interferometry

Abstract

1. Introduction
2. Depolarization Effect of Laser Signals for Different Targets
2.1. The Influence of Depolarization Effect on Interferometry
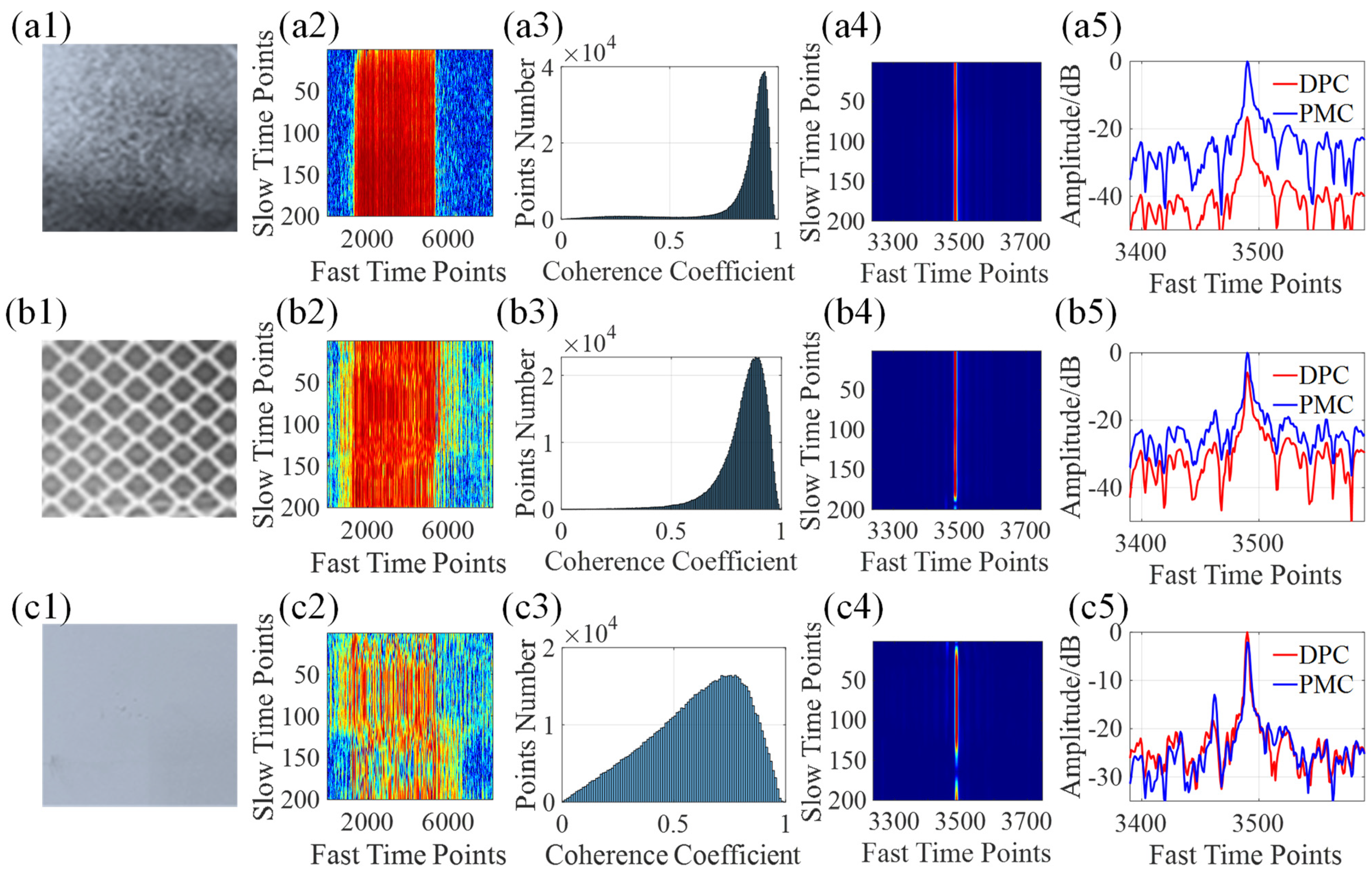
2.2. Study on the Depolarization Effect of Different Targets
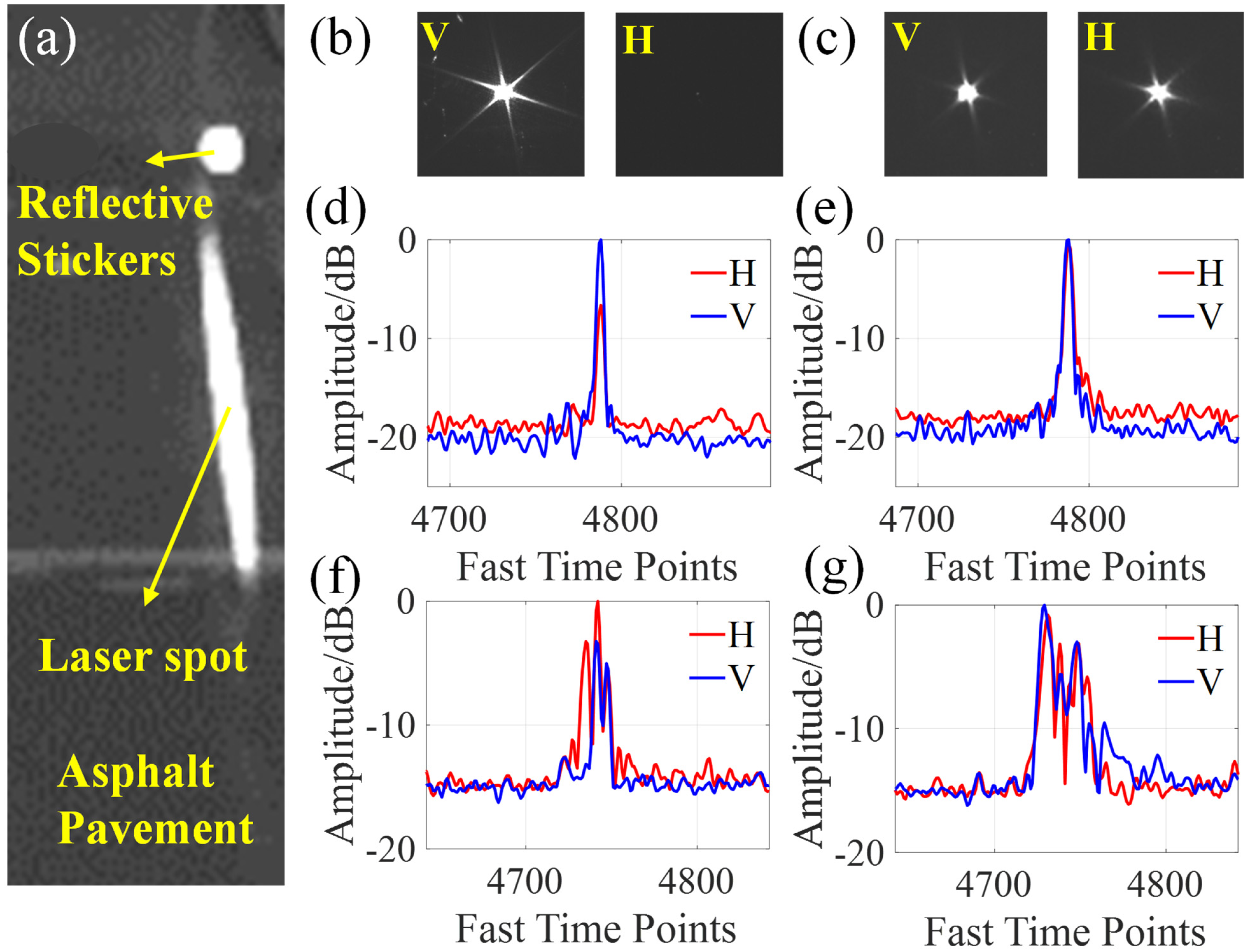
2.3. Study on the Depolarization Effect of Targets Corresponding to Light Sources with Different Polarization States
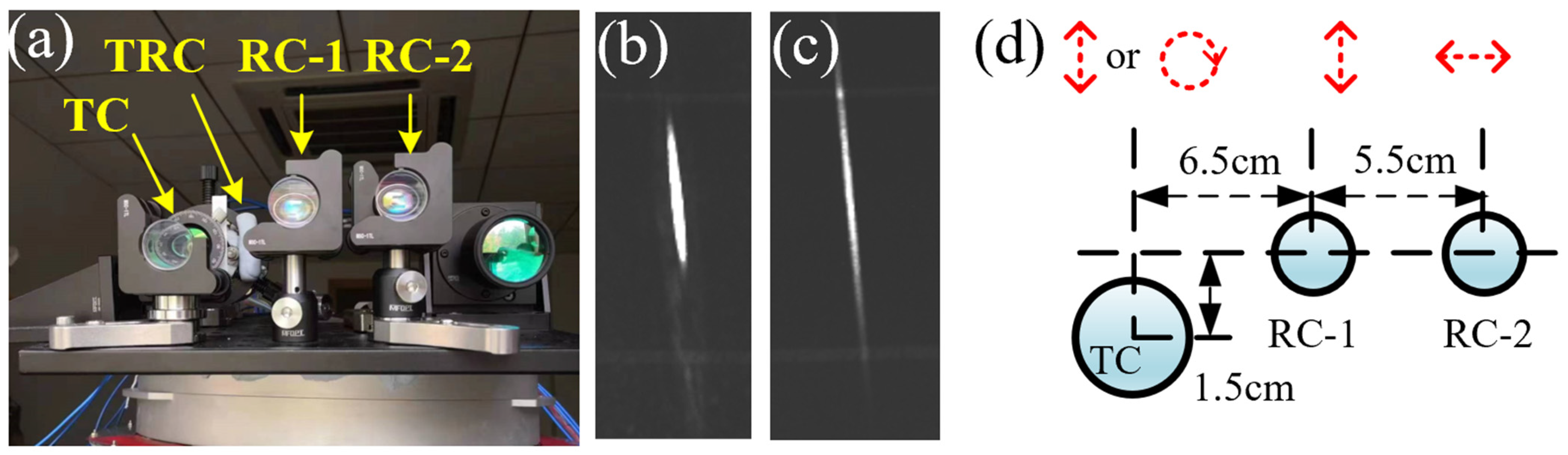
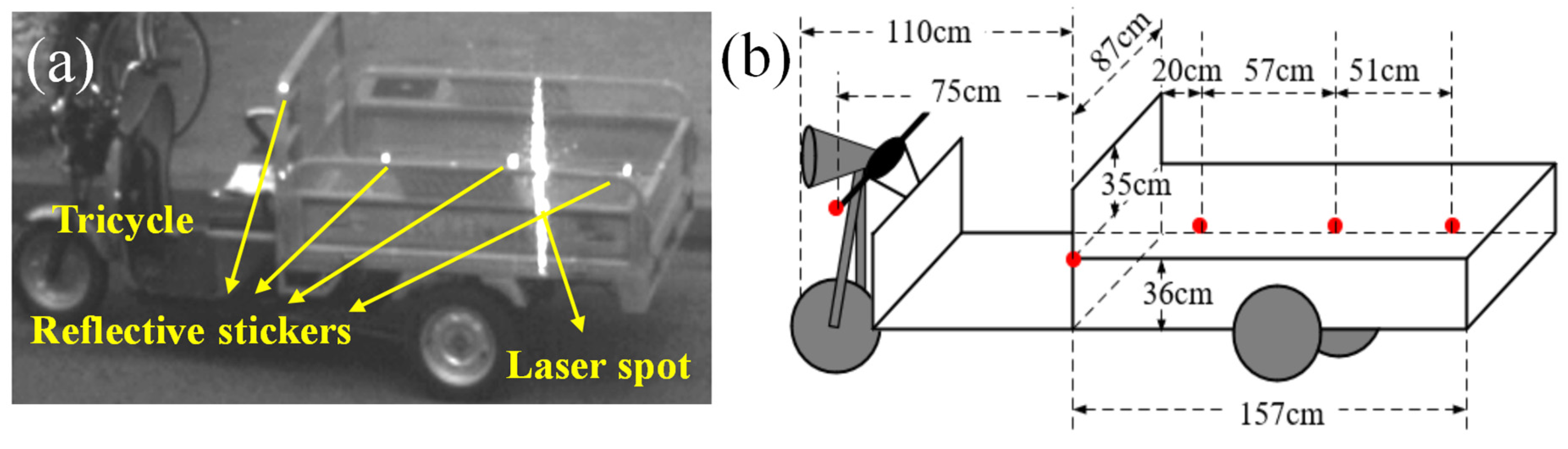
3. Introduction to Experimental System
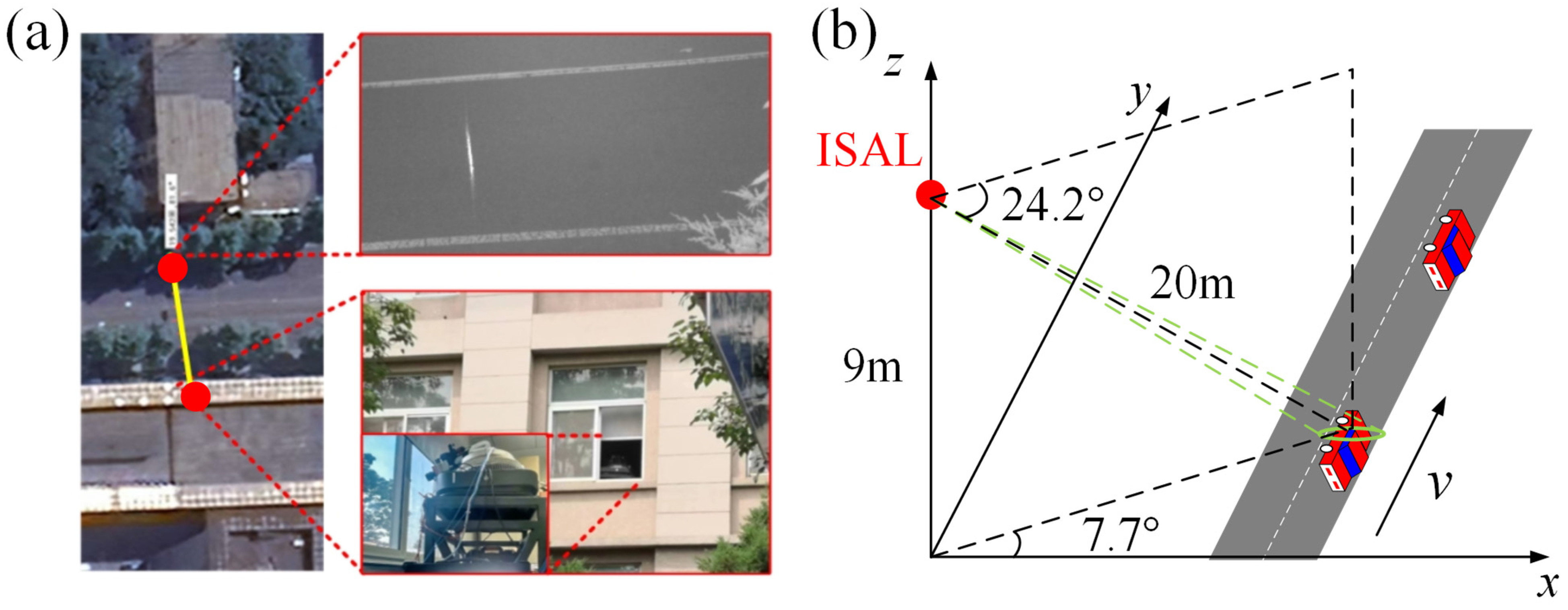
4. ISAL Imaging Experiment of Moving Target
4.1. Signal Processing Flow
- Preprocess: the echo signal and the transmitted reference signal are preprocessed first, including Hilbert transform and harmonic interference removal.
- Parameter estimation: estimate the oblique angle, depression angle, and oblique distance according to the measured observation geometry, estimate the target motion velocity according to the infrared camera video, and conduct Doppler compensation for the echo signal in combination with the estimated parameters. The equation for calculating the Doppler frequency to be compensated is as follows:where is the azimuth beamwidth. The compensated echo signal and the TRC signal are conjugate-multiplied in the fast frequency domain to achieve pulse compression. Then, the estimated parameters are fine-tuned based on the time and frequency domains of the pulse compression results until the ideal pulse compression result is obtained.
- 3.
- Registration: perform fast-time alignment and slow-time alignment on data from two channels.
- 4.
- Estimation and compensation of vibration phase error: the signals of the two channels after registration are used for coarse-estimation of the vibration phase error using SCA, and then the vibration phase error is fine-estimation using the along-track interferometry.
- 5.
- Construction of matched filter: after compensating for the vibration phase error, the second-order phase generated by translational motion in the phase of the echo signal occupies the main component, and the matched filter is constructed according to the target motion velocity, and the frequency modulation rate of the matched filter is as follows:
- 6.
- Imaging: divide the sub-aperture according to the method in the literature [13] and use the Range-Doppler (RD) algorithm for imaging. The sub-aperture imaging results are then stitched and azimuthally multi-look processed to obtain the final imaging result. The duration of the imaging sub-aperture depends on the synthetic-aperture time. The relationship between the synthetic-aperture time T and the azimuth beamwidth, the slant distance R, the target movement speed V, the oblique angle, and the depression angle is as follows:
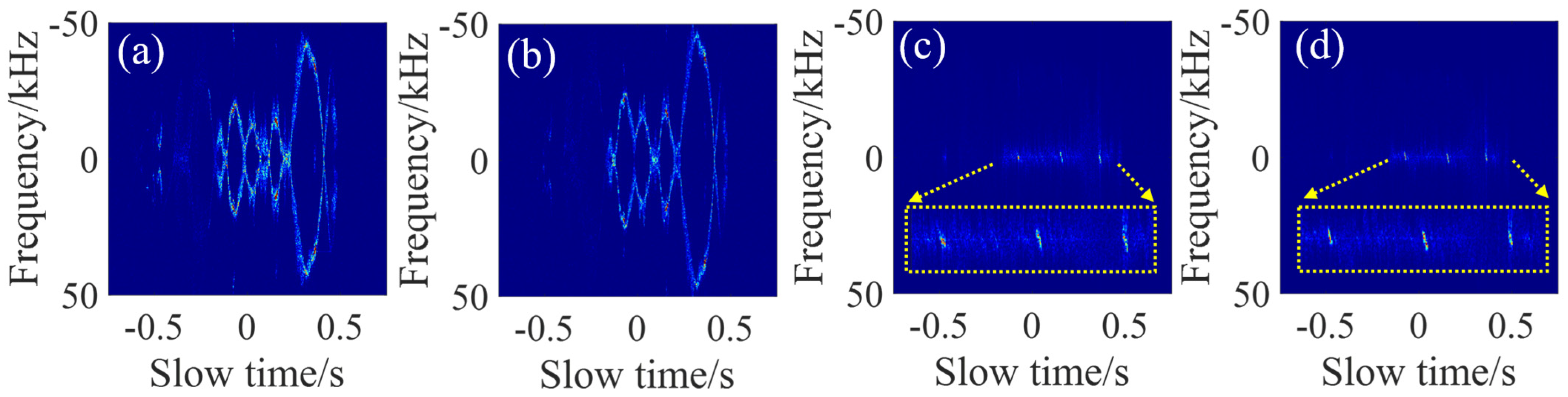
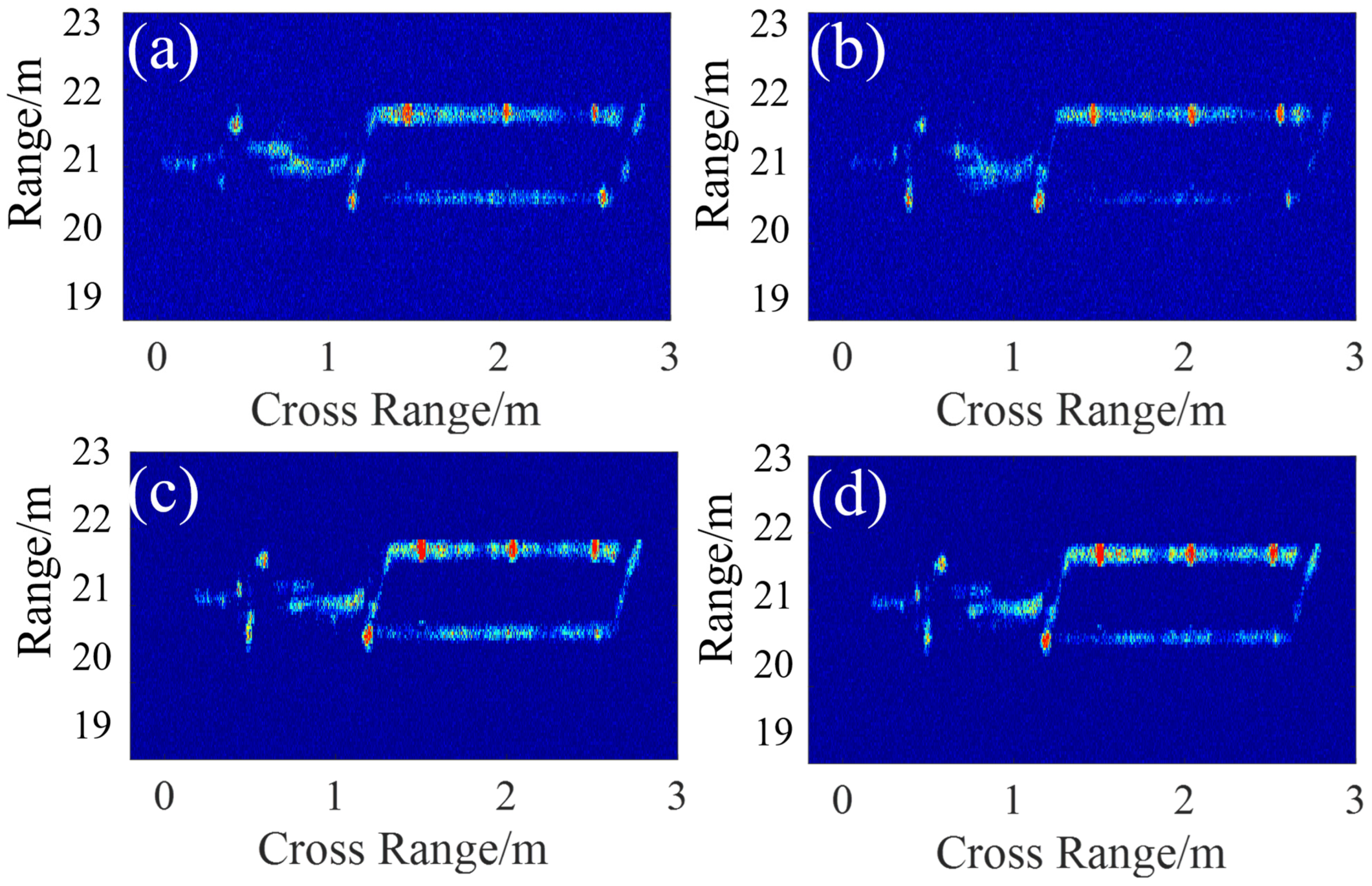
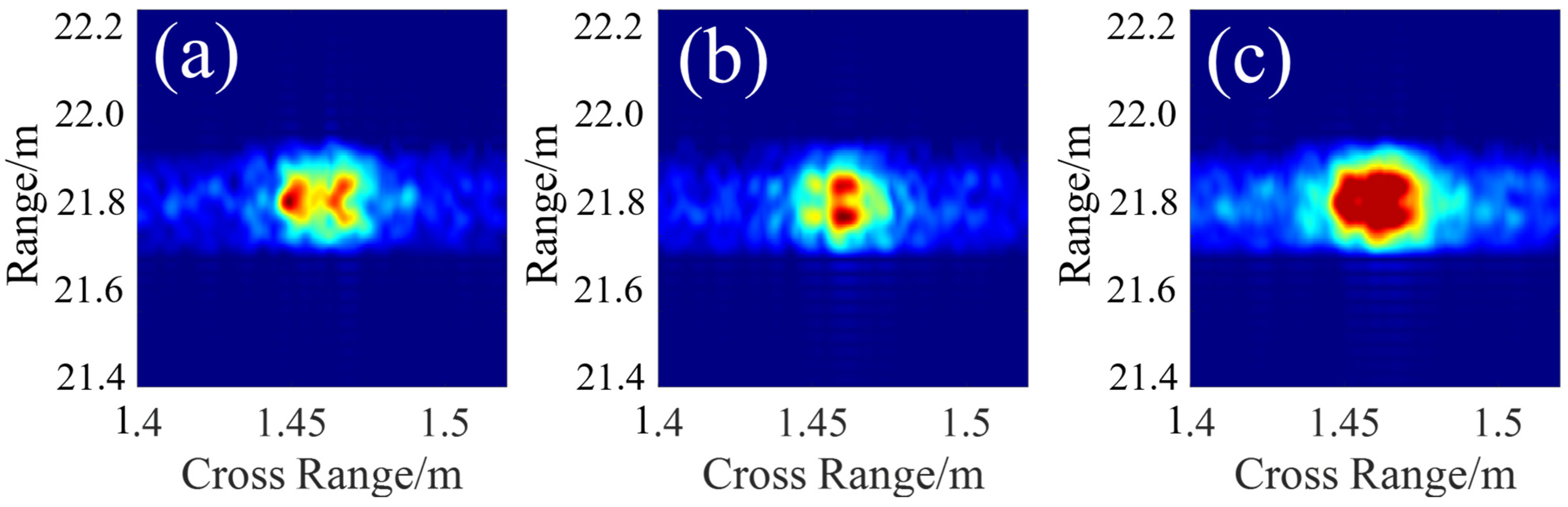
4.2. ISAL Imaging Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Crouch, S.; Barber, Z.W. Laboratory demonstrations of interferometric and spotlight synthetic aperture ladar techniques. Opt. Express 2012, 20, 24237–24246. [Google Scholar] [CrossRef] [PubMed]
- Bashkansky, M.; Lucke, R.L.; Funk, E.E.; Reintjes, J.F.; Rickard, L.J. Synthetic aperture imaging at 1.5 um: Laboratory demonstration and potential application to planet surface studies. In Proceedings of the Highly Innovative Space Telescope Concepts, Waikoloa, HI, USA, 22–23 August 2002; SPIE: Bellingham, WA, USA, 2002; Volume 4849, pp. 48–56. [Google Scholar] [CrossRef]
- Lv, Y.; Wu, Y.; Wang, H.; Qiu, L.; Jiang, J.; Sun, Y. An Inverse Synthetic Aperture Ladar Imaging Algorithm of Maneuvering Target Based on Integral Cubic Phase Function-Fractional Fourier Transform. Electronics 2018, 7, 148. [Google Scholar] [CrossRef]
- Guo, L.; Yin, H.; Zeng, X.; Xing, M.; Tang, Y. Analysis of airborne synthetic aperture ladar imaging with platform vibration. Optik 2017, 140, 171–177. [Google Scholar] [CrossRef]
- Bashkansky, M.; Lucke, R.L.; Funk, E.; Rickard, L.; Reintjes, J. Two-dimensional synthetic aperture imaging in the optical domain. Opt. Lett. 2002, 27, 1983–1985. [Google Scholar] [CrossRef] [PubMed]
- Abdukirim, A.; Ren, Y.; Tao, Z.; Liu, S.; Li, Y.; Deng, H.; Rao, R. Effects of Atmospheric Coherent Time on Inverse Synthetic Aperture Ladar Imaging through Atmospheric Turbulence. Remote Sens. 2023, 15, 2883. [Google Scholar] [CrossRef]
- Zhao, Z.; Huang, J.; Wu, S.; Wang, K.; Bai, T.; Dai, Z.; Kong, X.; Wu, J. Experimental demonstration of tri-aperture Differential Synthetic Aperture Ladar. Opt. Commun. 2017, 389, 181–188. [Google Scholar] [CrossRef]
- Karr, T.J. Atmospheric Phase Error in Coherent Laser Radar. IEEE Trans. Antennas Propag. 2007, 55, 1122–1133. [Google Scholar] [CrossRef]
- Attia, E.H. Data-adaptive motion compensation for synthetic aperture LADAR. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; IEEE Cat. No. 04TH8720; IEEE: New York, NY, USA, 2004; Volume 3, pp. 1782–1787. [Google Scholar] [CrossRef]
- Ma, M.; Li, D.; Du, J. Imaging of airborne synthetic aperture ladar under platform vibration condition. J. Radars 2014, 3, 591. [Google Scholar] [CrossRef]
- Wang, S.; Wang, B.; Xiang, M.; Sun, X.; Xu, W.; Wu, Y. Synthetic aperture ladar motion compensation method based on symmetrical triangular linear frequency modulation continuous wave. Opt. Commun. 2020, 471, 125901. [Google Scholar] [CrossRef]
- Cui, A.; Li, D.; Wu, J.; Gao, J.; Zhou, K.; Liu, B. Laser Synthetic Aperture Coherent Imaging for Micro-Rotating Objects Based on Array Detectors. IEEE Photonics J. 2022, 14, 7861809. [Google Scholar] [CrossRef]
- Yu, R.; Wang, Q.; Dai, G.; Chen, X.; Ren, C.; Liu, J.; Li, D.; Wang, X.; Cao, H.; Qin, S.; et al. The Design and Performance Evaluation of a 1550 nm All-Fiber Dual-Polarization Coherent Doppler Lidar for Atmospheric Aerosol Measurements. Remote Sens. 2023, 15, 5336. [Google Scholar] [CrossRef]
- Zhou, K.; Li, D.; Gao, J.; Cui, A.; Wu, J.; Wu, S.; Wang, Y.; Liu, K.; Tan, S.; Gao, Y.; et al. Vibration phases estimation based on orthogonal interferometry of inner view field for ISAL imaging and detection. Appl. Opt. 2023, 62, 2845–2854. [Google Scholar] [CrossRef] [PubMed]
- Shi, R.; Li, W.; Dong, Q.; Wang, B.; Xiang, M.; Wang, Y. Synthetic Aperture Ladar Motion Compensation Method Based on Symmetric Triangle Linear Frequency Modulation Continuous Wave Segmented Interference. Remote Sens. 2024, 16, 793. [Google Scholar] [CrossRef]
- Xu, M.; Zhou, Y.; Sun, J.; Lu, Z.; Lao, C.; He, H.; Li, Y. Generation of linear frequency modulation laser source with broadband narrow linewidth using optical phase modulator. Infrared Laser Eng. 2020, 49, 0205004. [Google Scholar] [CrossRef]
- Gao, J.; Li, D.; Zhou, K.; Cui, A.; Wu, J.; Wu, S.; Wang, Y.; Liu, K.; Tan, S.; Gao, Y.; et al. Imaging and detection method for low signal-to-noise ratio airborne synthetic aperture ladar signals. Opt. Eng. 2023, 62, 098104. [Google Scholar] [CrossRef]
- Mo, D.; Wang, R.; Wang, N.; Zhang, K.; Li, G. Experiment of inverse synthetic aperture LADAR on real target. In Proceedings of the 2017 7th IEEE International Conference on Electronics Information and Emergency Communication (ICEIEC), Macau, China, 21–23 July 2017; IEEE: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Cui, A.; Li, D.; Wu, J.; Zhou, K.; Gao, J.; Qiao, M.; Wu, S.; Wang, Y.; Yao, Y. Moving target imaging of a dual-channel ISAL with binary phase shift keying signals and large squint angles. Appl. Opt. 2022, 61, 5466–5473. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Li, D.; Wu, J.; Cui, A.; Wu, S. Moving Real-Target Imaging of a Beam-Broaden ISAL Based on Orthogonal Polarization Receiver and Along-Track Interferometry. Remote Sens. 2024, 16, 3201. https://doi.org/10.3390/rs16173201
Gao J, Li D, Wu J, Cui A, Wu S. Moving Real-Target Imaging of a Beam-Broaden ISAL Based on Orthogonal Polarization Receiver and Along-Track Interferometry. Remote Sensing. 2024; 16(17):3201. https://doi.org/10.3390/rs16173201
Chicago/Turabian StyleGao, Jinghan, Daojing Li, Jiang Wu, Anjing Cui, and Shumei Wu. 2024. "Moving Real-Target Imaging of a Beam-Broaden ISAL Based on Orthogonal Polarization Receiver and Along-Track Interferometry" Remote Sensing 16, no. 17: 3201. https://doi.org/10.3390/rs16173201
APA StyleGao, J., Li, D., Wu, J., Cui, A., & Wu, S. (2024). Moving Real-Target Imaging of a Beam-Broaden ISAL Based on Orthogonal Polarization Receiver and Along-Track Interferometry. Remote Sensing, 16(17), 3201. https://doi.org/10.3390/rs16173201