


DIPHORM: An Innovative DIgital PHOtogrammetRic Monitoring Technique for Detecting Surficial Displacements of Landslides

 ,
,  , , ,
, , ,  and
and 
Abstract

1. Introduction
1.1. Traditional Techniques and Modern Advancements
1.2. Emerging Techniques
2. Methods and Instrument
2.1. Hardware Configuration and Calibration
2.2. Time-Lapse Image Processing
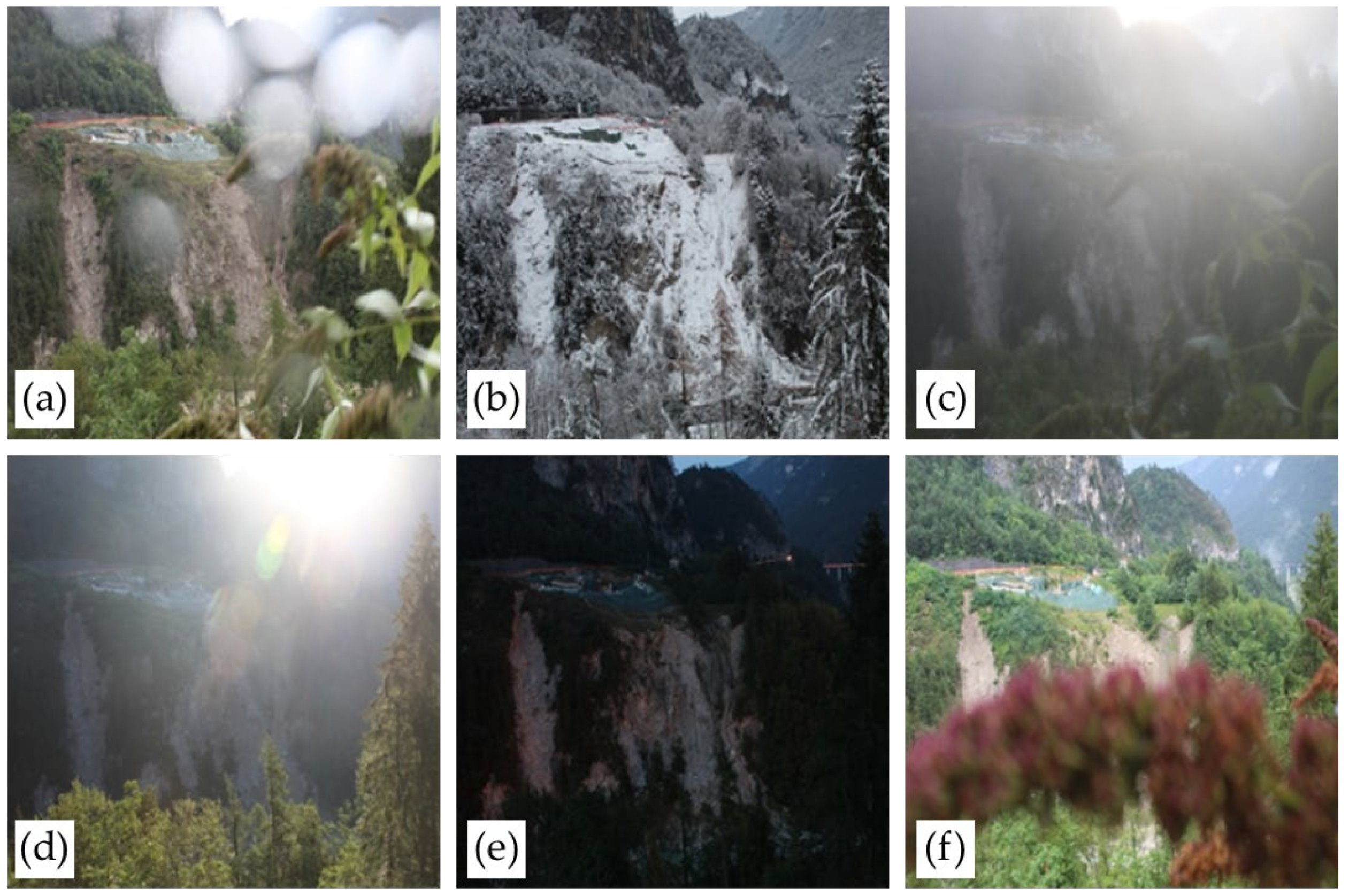
- Very low (rate 1): images with evident disturbances, making them unusable. The neural network was also trained to identify the reason for the disturbance, such as the presence of rain, snow, fog, glare, darkness, or other elements (Figure 4a–f);
- Medium (rates 2 and 3): photos with shadow casts that reduce the overall quality but are still usable (Figure 5a,b);
- Good and very good (rates 4 and 5): high-quality images (Figure 5c,d).
3. The Sant’Andrea Landslide
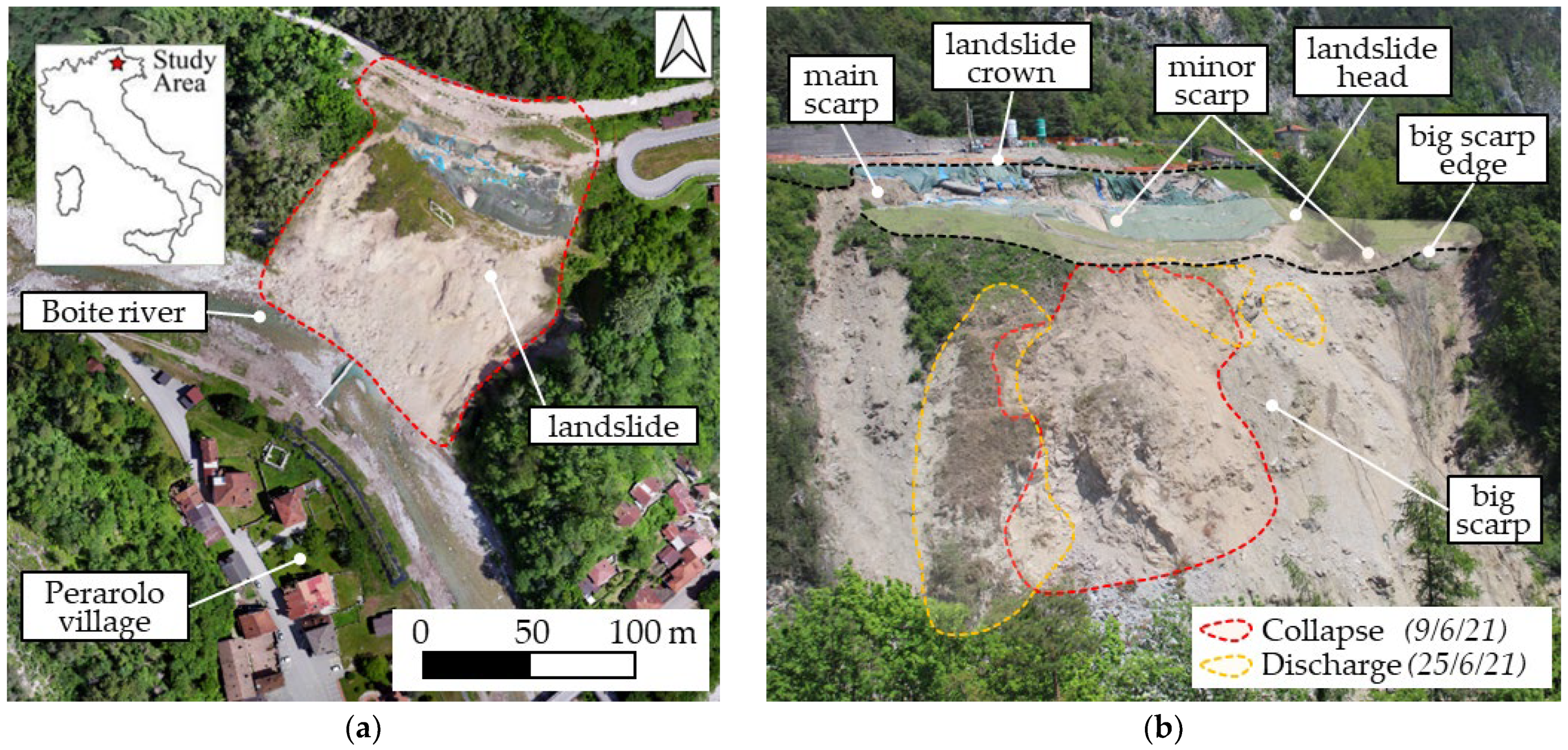
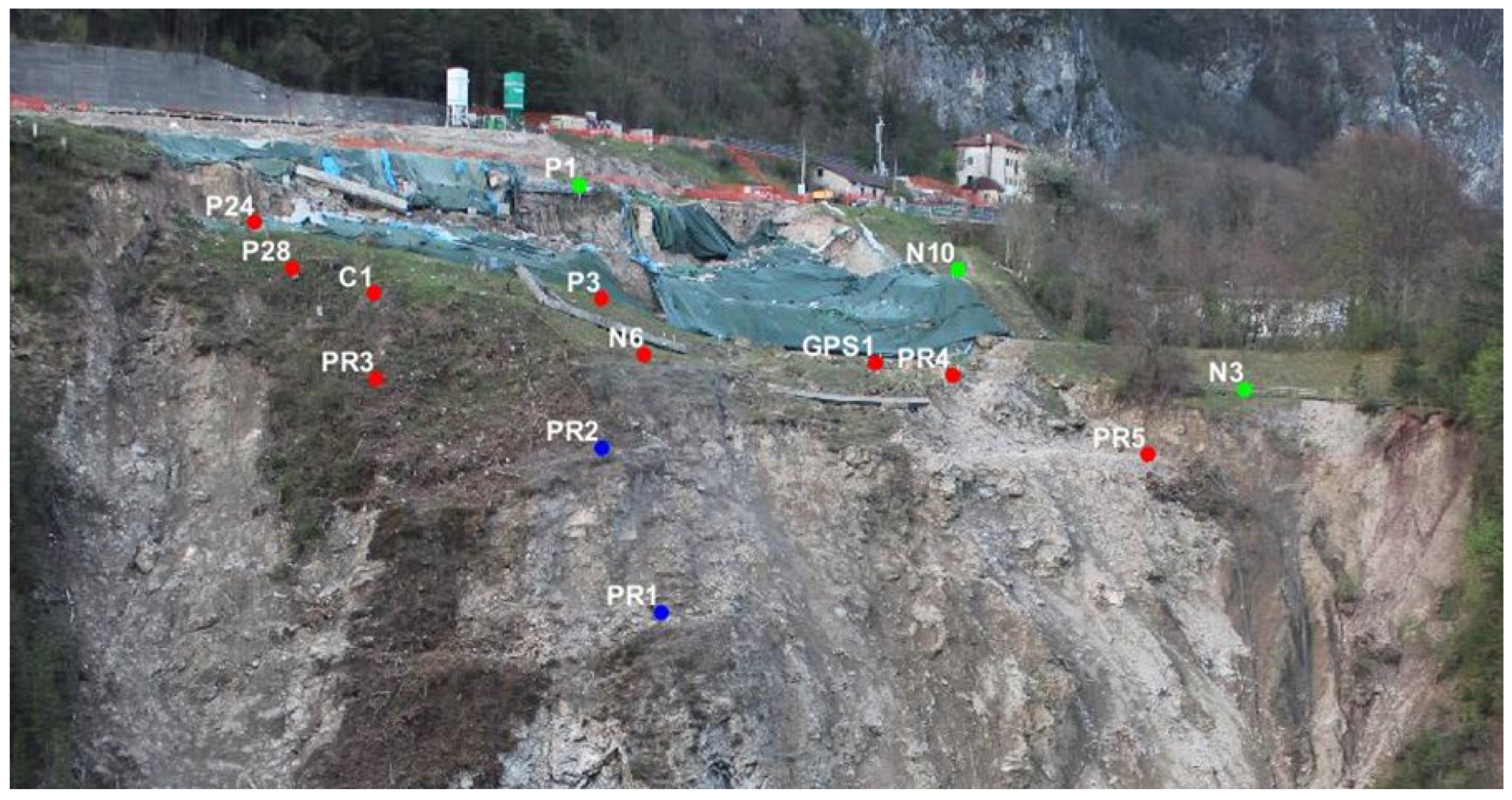
3.1. Site Description
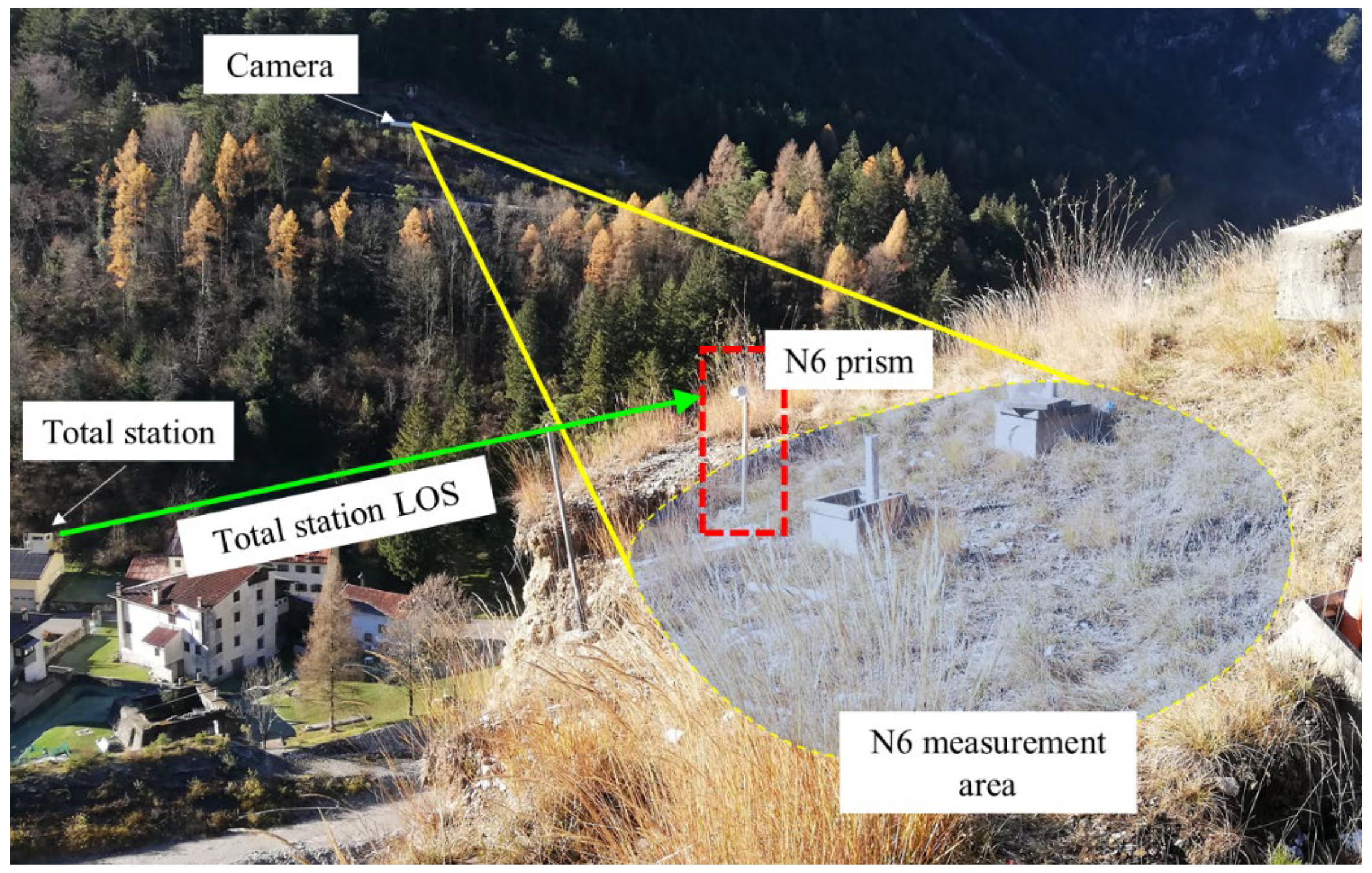
3.2. Monitoring System
3.3. Photogrammetric Monitoring
4. Results
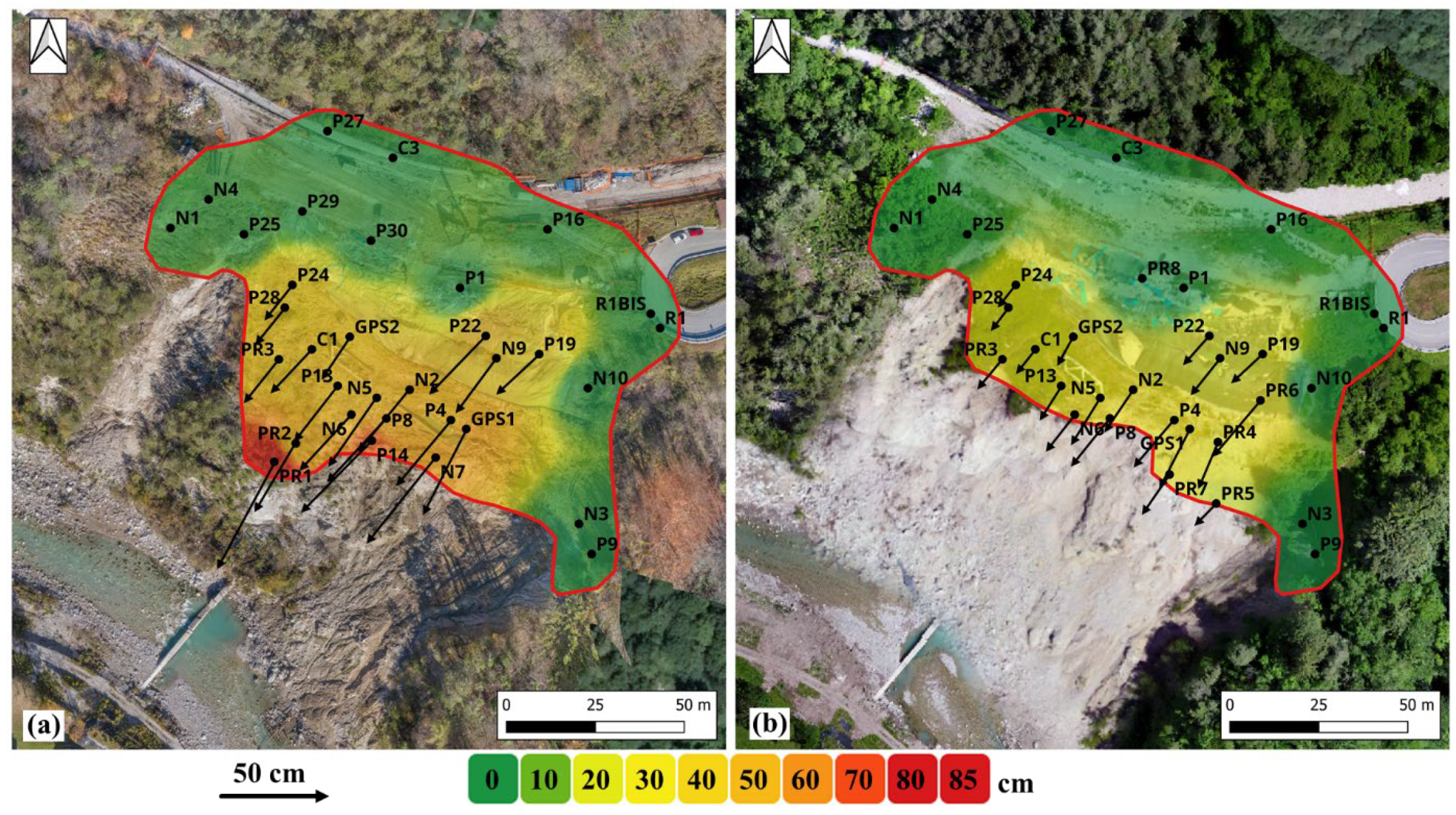
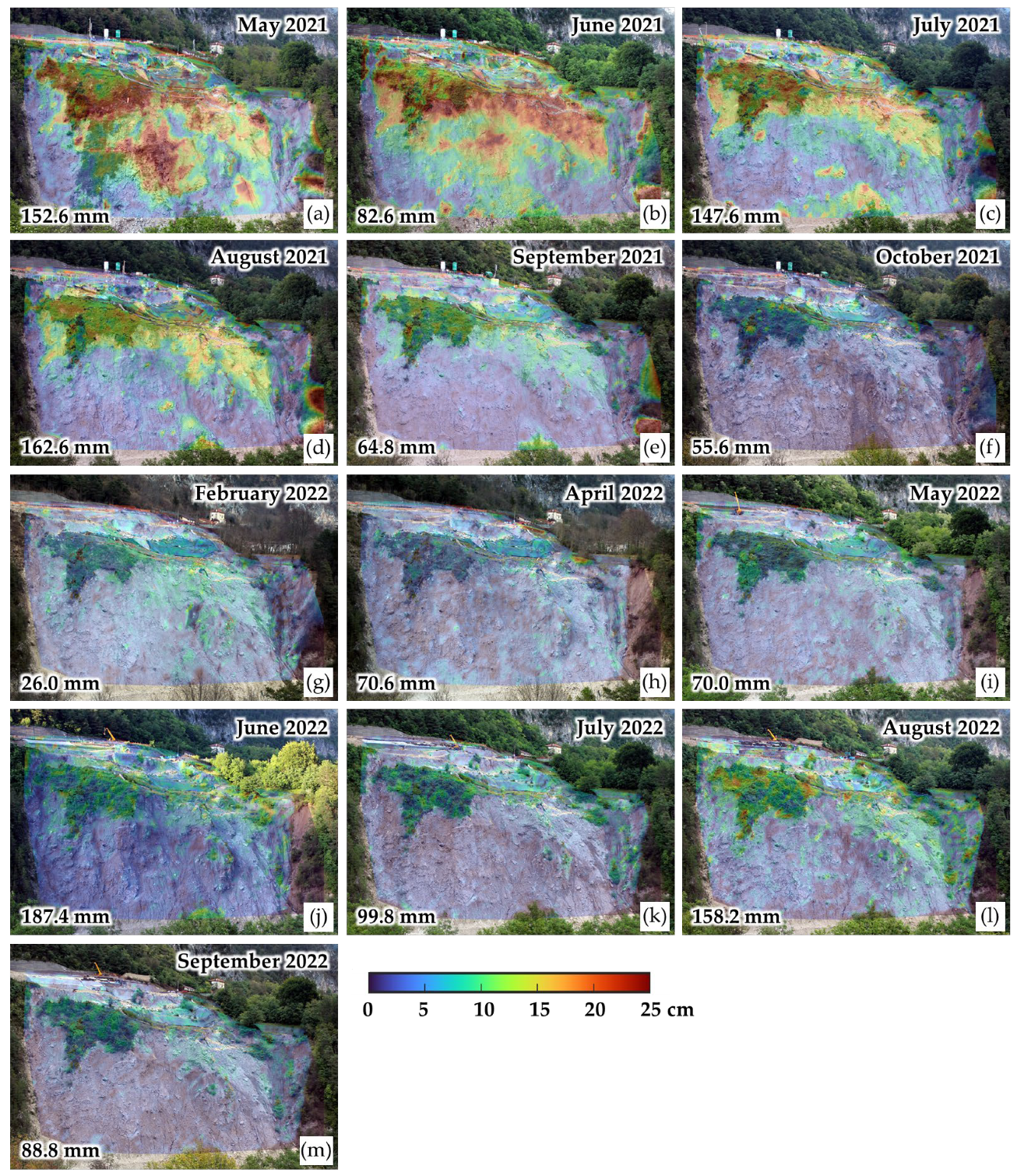
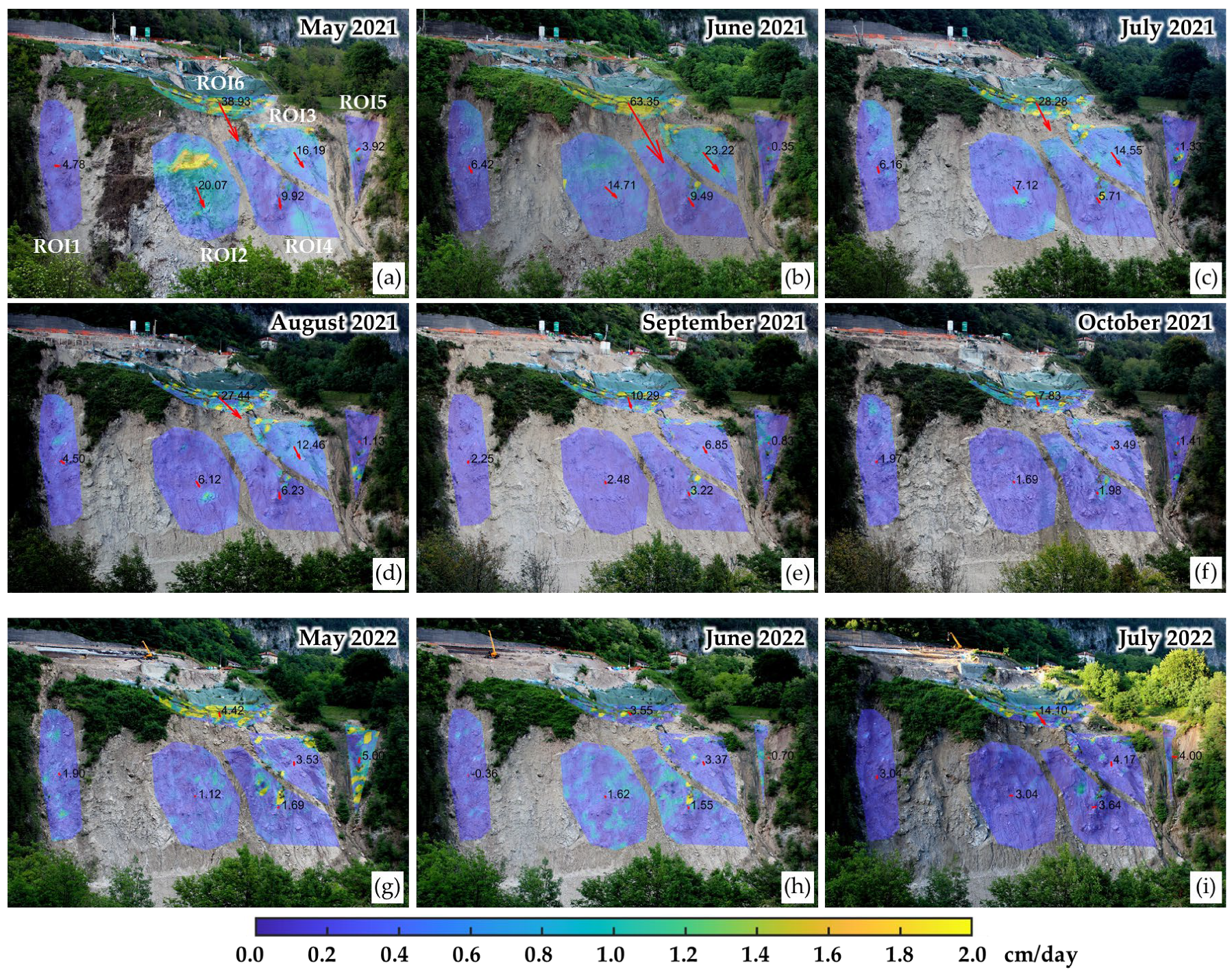
4.1. Cumulative Displacement Maps
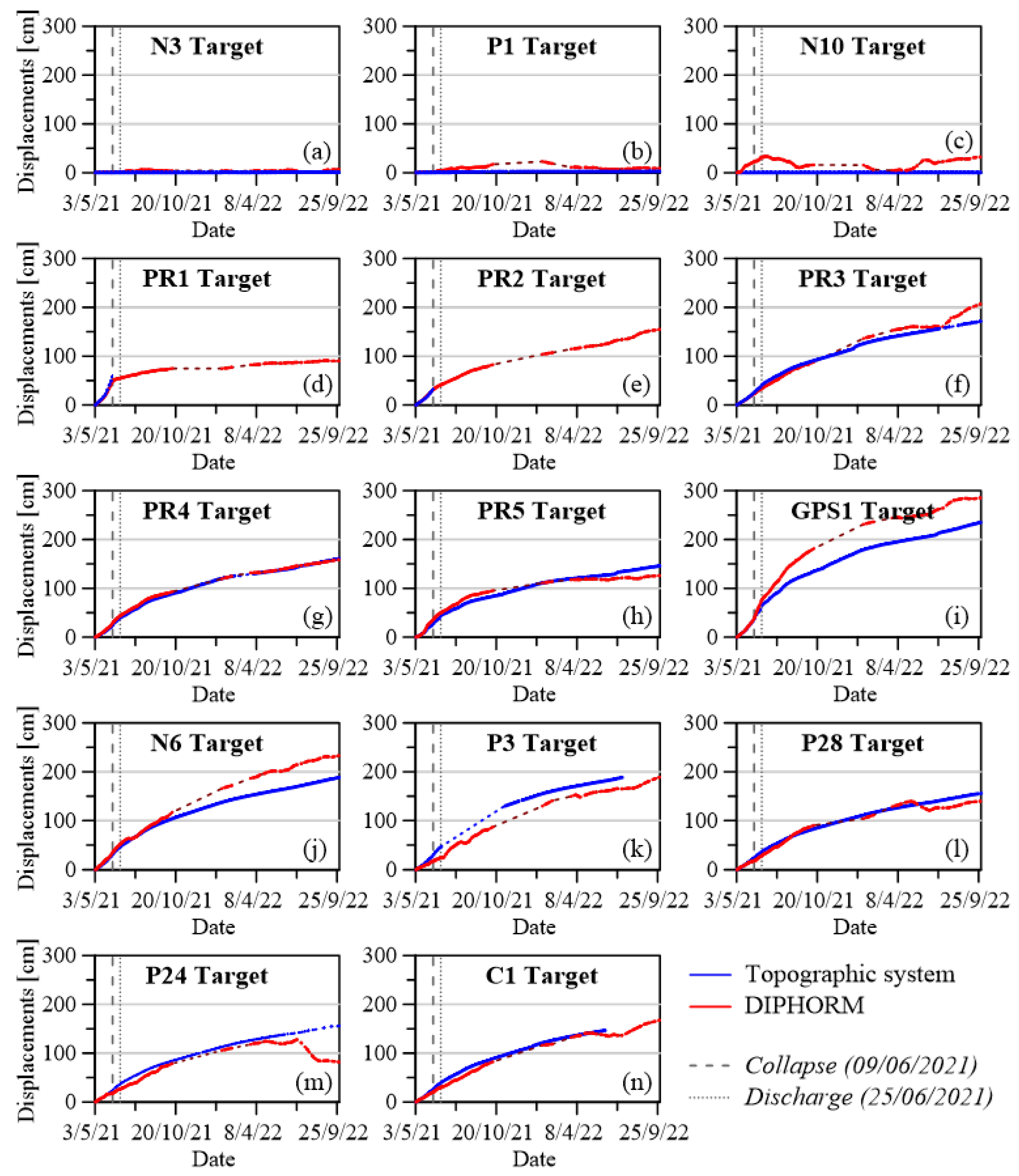
4.2. Validation
5. Discussion
Quantitative Analysis of Displacements
- ROI 1: The displacement rate drops from 2.1 mm/d to about one-third of that value starting from September 2021 (Figure 17a);
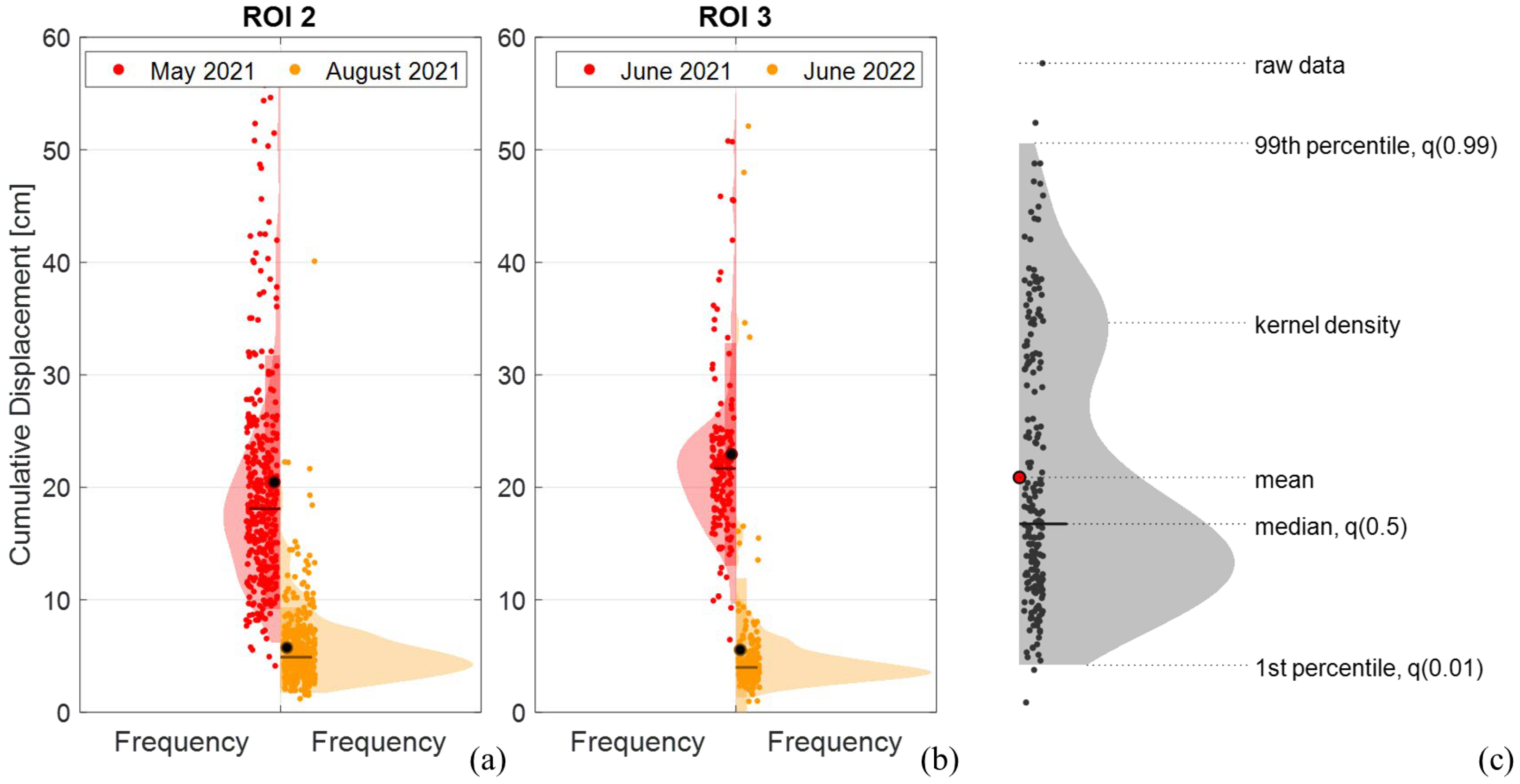
- ROI 2: Initially, its displacement rate is very high, at approximately 8.1 mm/d. After the natural collapse, it sharply decreases to 2.3 mm/d and then settles around 1 mm/d in 2022, confirming the strong correlation with the collapses (Figure 17a);
- ROI 3: Its velocity is maintained around 7 mm/d until August 2021, after which there is a gradual decrease to half the value and a further drop to about 1.5 mm/d from March 2022 (Figure 17b);
- ROI 4: It shows a gradual decrease in displacement rates, similar to other ROIs, with the final kinematics consistent with the rest of the slope (Figure 17b);
- ROI 5: It can be considered a control region with very limited displacements for the entire monitoring period. This is aligned with the observations from the topographic targets nearby, which also show almost zero displacements (Figure 17c);
- ROI 6: It exhibits the highest displacement rates, remaining very high at 17.2 mm/d in the spring and summer of 2021 (Figure 17c). It starts a gradual slow down only from July, halving in the period August–December 2021, and stabilizing at a constant value of 2.7 mm/d starting from 2022.
6. Conclusions
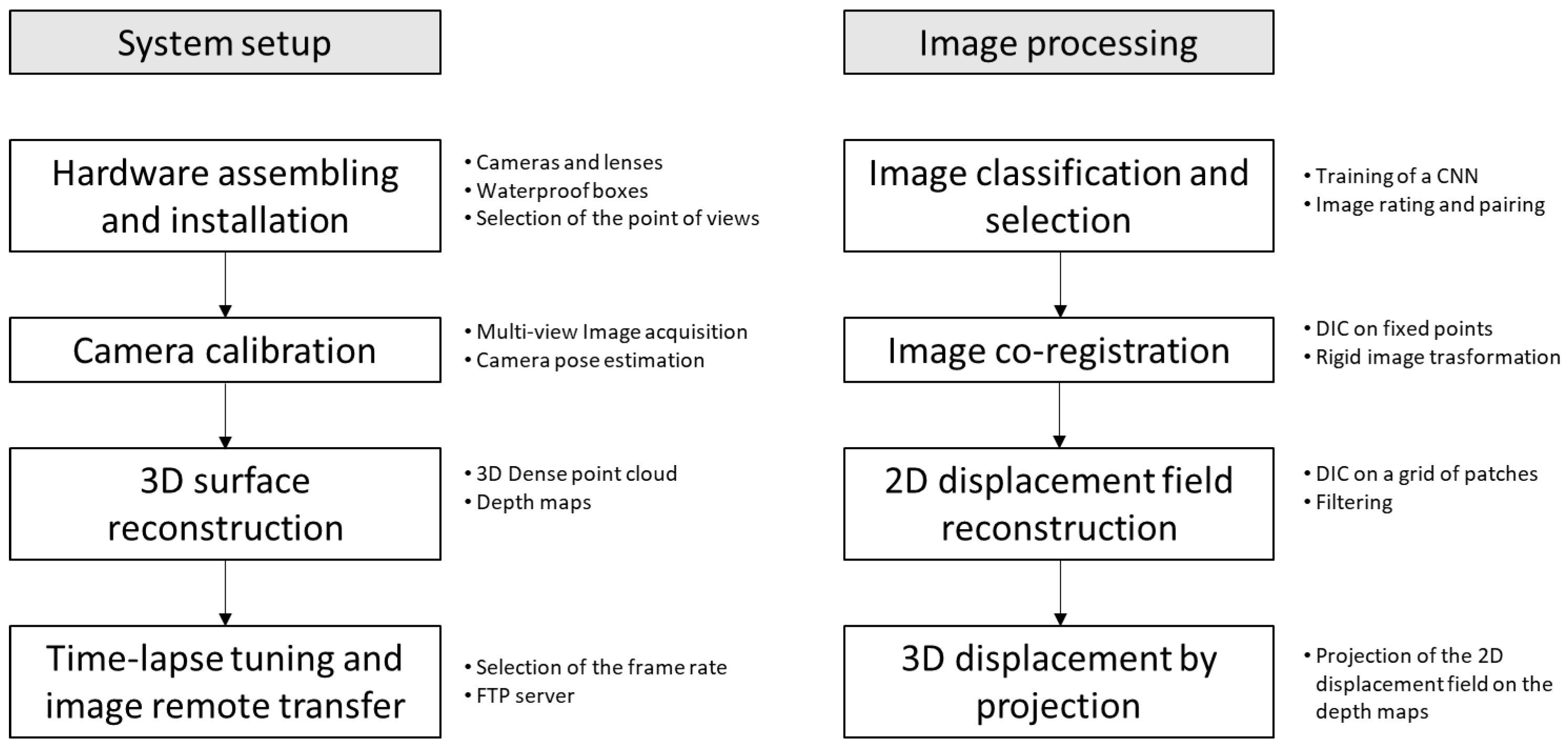
- System setup: installation, calibration, and tuning of the cameras and of the remote tools, in relation to the phenomenon to be monitored. This permits obtaining the camera pose of the fixed camera and the reference slope surface.
- Image pre-processing: automatic discarding of the unsuitable images, identification of the optimal images among the remaining ones, and correction of the slight oscillations to which the cameras were subjected.
- DIC on the image sequence: two-dimensional displacement detection. The 2D vectors are finally projected on the depth map of the scene to obtain a three-dimensional displacement map scaled in metric units.
- Cost efficiency: the equipment for the photogrammetric system is significantly less expensive and can be adjusted to available resources by selecting cameras of varying quality. Traditional techniques, such as topographic or GPS monitoring, are very precise but limited to a few points and require costs of five to ten times higher, including equipment, installation, and management. Multiple surveys using laser scanners require expensive equipment and the presence of an operator, and provide information derived from point cloud differences rather than explicit displacement measurements.
- Operational flexibility: the monitoring frequency, the selection of areas to be framed, the camera optic, and the image acquisition parameters are entirely site-specific, offering considerable flexibility. On the other hand, RTS and GNSS monitoring require the preliminary choice of the point to be monitored.
- Spatial density: DIPHORM provides spatially dense and distributed information over the entire framed area, even in locations where target positioning would be difficult, and their stability limited in time.
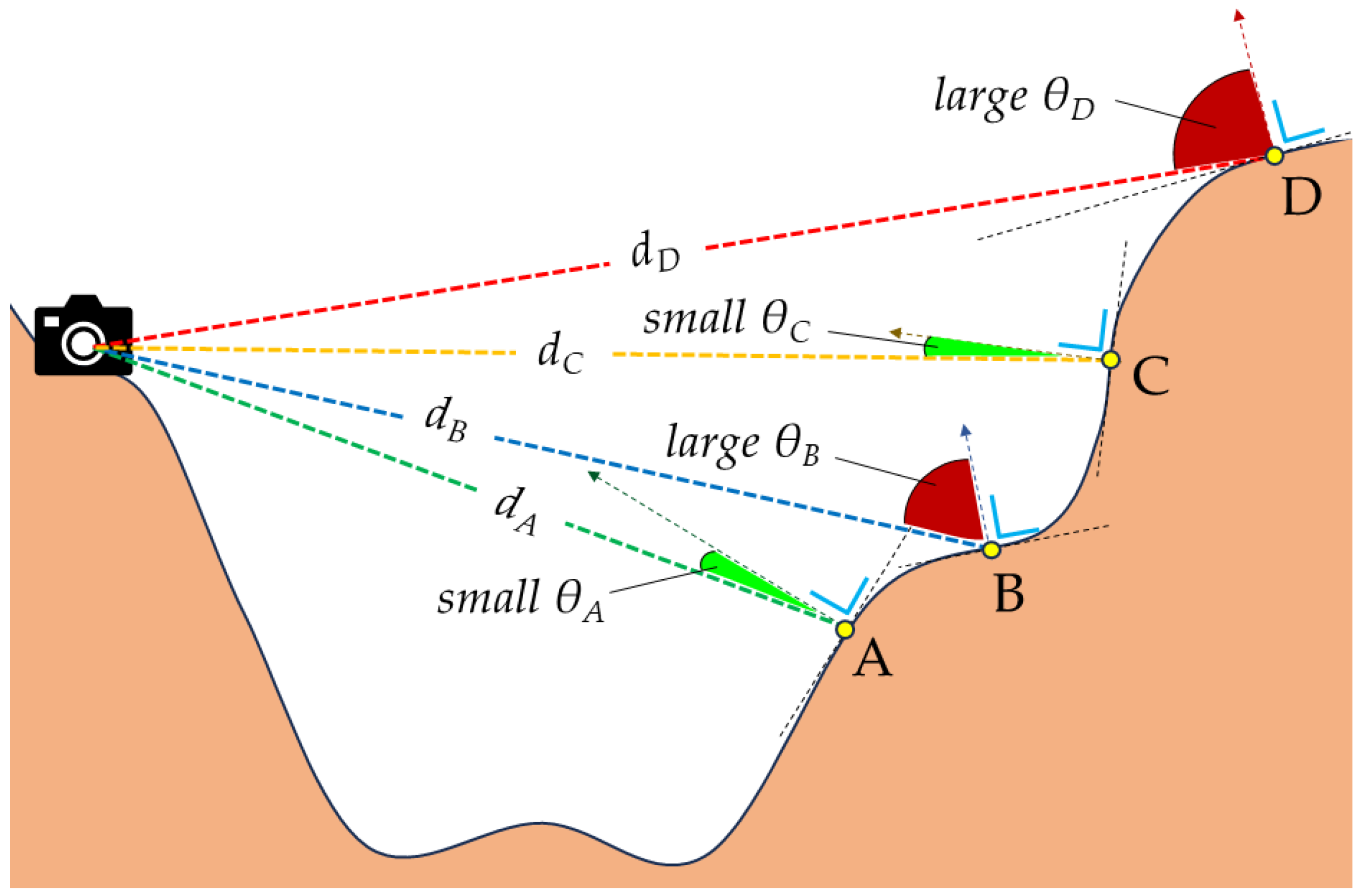
- Accuracy and precision: the accuracy and precision of the photogrammetric system are lower than those of the other methods (i.e., RTS and GNSS) and are highly dependent on the distance and orientation of the monitored surface relative to the shooting direction of the cameras.
- Directional resolution: while the photogrammetric system effectively captures transversal displacements relative to the direction of shooting, it is less capable of maintaining the same resolution in monitoring displacements directed toward the camera as the RTS method.
- Surface conditions: vegetated surfaces in general are not suitable to be monitored adequately with image correlation algorithms because of the occurrence of artifactual shifts due to vegetation growth and movement of leaves and stems with wind. Also, snow-covered surfaces are not suitable. Even if DIPHORM uses filters that help to reduce these problems, unvegetated dry areas should be preferred.
- Environmental conditions: heavy rainfalls, shadows, reflections, and fog and clouds can significantly reduce the quality of photogrammetric monitoring with results that are difficult to estimate. A good selection of photos at the start, such as the one proposed, can help reduce this problem appreciably.
- The DIPHORM method appears particularly suitable for measuring the displacements of medium-slow, low-vegetated landslides, with an orthogonal view of the slope and with displacements that are preferentially transversal-oriented (i.e., not along the line of sight). DIPHORM is reliable in providing a general view of landslide displacements in a spatially dense manner, where the accuracy of the individual measurement is not as important compared to understanding the overall spatial and temporal trend. In this sense, the DIPHORM technique is not intended as an alternative to the other traditional topographic systems. Instead, combining both the photogrammetric system and the RTS method (and/or GNSS receivers, laser scanner surveys, GB-InSAR surveys), as implemented at the Sant’Andrea landslide, leverages the advantages of both methods and provides a more comprehensive understanding of landslide dynamics. Further developments of the method could include the use of multiple cameras simultaneously, even with different optics, and integrating other techniques to update the 3D surface on which the measurements are projected more frequently and automatically.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Angeli, M.-G.; Pasuto, A.; Silvano, S. A Critical Review of Landslide Monitoring Experiences. Eng. Geol. 2000, 55, 133–147. [Google Scholar] [CrossRef]
- Cola, S.; Gabrieli, F.; Marcato, G.; Pasuto, A.; Simonini, P. Evolutionary Behaviour of the Tessina Landslide. Riv. Ital. Geotec. 2016, 50, 51–70. [Google Scholar]
- Dunnicliff, J. Geotechnical Instrumentation for Monitoring Field Performance; A Wiley-Interscience Publication; Wiley: New York, NY, USA, 1993; ISBN 978-0-471-00546-9. [Google Scholar]
- Marr, P.; Jiménez Donato, Y.A.; Carraro, E.; Kanta, R.; Glade, T. The Role of Historical Data to Investigate Slow-Moving Landslides by Long-Term Monitoring Systems in Lower Austria. Land 2023, 12, 659. [Google Scholar] [CrossRef]
- Crosta, G.B.; Di Prisco, C.; Frattini, P.; Frigerio, G.; Castellanza, R.; Agliardi, F. Chasing a Complete Understanding of the Triggering Mechanisms of a Large Rapidly Evolving Rockslide. Landslides 2014, 11, 747–764. [Google Scholar] [CrossRef]
- Carlà, T.; Tofani, V.; Lombardi, L.; Raspini, F.; Bianchini, S.; Bertolo, D.; Thuegaz, P.; Casagli, N. Combination of GNSS, Satellite InSAR, and GBInSAR Remote Sensing Monitoring to Improve the Understanding of a Large Landslide in High Alpine Environment. Geomorphology 2019, 335, 62–75. [Google Scholar] [CrossRef]
- Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a Terrestrial Laser Scanner (TLS) to the Study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef]
- Delacourt, C.; Allemand, P.; Berthier, E.; Raucoules, D.; Casson, B.; Grandjean, P.; Pambrun, C.; Varel, E. Remote-Sensing Techniques for Analysing Landslide Kinematics: A Review. Bull. Soc. Géol. Fr. 2007, 178, 89–100. [Google Scholar] [CrossRef]
- Prokop, A.; Panholzer, H. Assessing the Capability of Terrestrial Laser Scanning for Monitoring Slow Moving Landslides. Nat. Hazards Earth Syst. Sci. 2009, 9, 1921–1928. [Google Scholar] [CrossRef]
- Bitelli, G.; Dubbini, M.; Zanutta, A. Terrestrial Laser Scanning and Digital Photogrammetry Techniques to Monitor Landslide Bodies. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 246–251. [Google Scholar]
- Teza, G.; Galgaro, A.; Zaltron, N.; Genevois, R. Terrestrial Laser Scanner to Detect Landslide Displacement Fields: A New Approach. Int. J. Remote Sens. 2007, 28, 3425–3446. [Google Scholar] [CrossRef]
- Kromer, R.A.; Abellán, A.; Hutchinson, D.J.; Lato, M.; Chanut, M.-A.; Dubois, L.; Jaboyedoff, M. Automated Terrestrial Laser Scanning with Near-Real-Time Change Detection—Monitoring of the Séchilienne Landslide. Earth Surf. Dyn. 2017, 5, 293–310. [Google Scholar] [CrossRef]
- Caduff, R.; Schlunegger, F.; Kos, A.; Wiesmann, A. A Review of Terrestrial Radar Interferometry for Measuring Surface Change in the Geosciences. Earth Surf. Process. Landf. 2015, 40, 208–228. [Google Scholar] [CrossRef]
- Tarchi, D.; Casagli, N.; Fanti, R.; Leva, D.D.; Luzi, G.; Pasuto, A.; Pieraccini, M.; Silvano, S. Landslide Monitoring by Using Ground-Based SAR Interferometry: An Example of Application to the Tessina Landslide in Italy. Eng. Geol. 2003, 68, 15–30. [Google Scholar] [CrossRef]
- Monserrat, O.; Crosetto, M.; Luzi, G. A Review of Ground-Based SAR Interferometry for Deformation Measurement. ISPRS J. Photogramm. Remote Sens. 2014, 93, 40–48. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.-P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Ground-Based Multi-View Photogrammetry for the Monitoring of Landslide Deformation and Erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Livio, F.A.; Bovo, F.; Gabrieli, F.; Gambillara, R.; Rossato, S.; Martin, S.; Michetti, A.M. Stability Analysis of a Landslide Scarp by Means of Virtual Outcrops: The Mt. Peron Niche Area (Masiere Di Vedana Rock Avalanche, Eastern Southern Alps). Front. Earth Sci. 2022, 10, 863880. [Google Scholar] [CrossRef]
- Kromer, R.; Walton, G.; Gray, B.; Lato, M.; Group, R. Development and Optimization of an Automated Fixed-Location Time Lapse Photogrammetric Rock Slope Monitoring System. Remote Sens. 2019, 11, 1890. [Google Scholar] [CrossRef]
- Blanch, X.; Abellan, A.; Guinau, M. Point Cloud Stacking: A Workflow to Enhance 3D Monitoring Capabilities Using Time-Lapse Cameras. Remote Sens. 2020, 12, 1240. [Google Scholar] [CrossRef]
- Giacomini, A.; Thoeni, K.; Santise, M.; Diotri, F.; Booth, S.; Fityus, S.; Roncella, R. Temporal-Spatial Frequency Rockfall Data from Open-Pit Highwalls Using a Low-Cost Monitoring System. Remote Sens. 2020, 12, 2459. [Google Scholar] [CrossRef]
- Travelletti, J.; Delacourt, C.; Allemand, P.; Malet, J.-P.; Schmittbuhl, J.; Toussaint, R.; Bastard, M. Correlation of Multi-Temporal Ground-Based Optical Images for Landslide Monitoring: Application, Potential and Limitations. ISPRS J. Photogramm. Remote Sens. 2012, 70, 39–55. [Google Scholar] [CrossRef]
- Motta, M.; Gabrieli, F.; Corsini, A.; Manzi, V.; Ronchetti, F.; Cola, S. Landslide Displacement Monitoring from Multi-Temporal Terrestrial Digital Images: Case of the Valoria Landslide Site. In Landslide Science and Practice; Margottini, C., Canuti, P., Sassa, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 73–78. ISBN 978-3-642-31444-5. [Google Scholar]
- Roncella, R.; Forlani, G.; Fornari, M.; Diotri, F. Landslide Monitoring by Fixed-Base Terrestrial Stereo-Photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II–5, 297–304. [Google Scholar] [CrossRef]
- Stanier, S.A.; Blaber, J.; Take, W.A.; White, D.J. Improved Image-Based Deformation Measurement for Geotechnical Applications. Can. Geotech. J. 2016, 53, 727–739. [Google Scholar] [CrossRef]
- Take, W.A. Thirty-Sixth Canadian Geotechnical Colloquium: Advances in Visualization of Geotechnical Processes through Digital Image Correlation. Can. Geotech. J. 2015, 52, 1199–1220. [Google Scholar] [CrossRef]
- White, D.J.; Take, W.A.; Bolton, M.D. Soil Deformation Measurement Using Particle Image Velocimetry (PIV) and Photogrammetry. Géotechnique 2003, 53, 619–631. [Google Scholar] [CrossRef]
- Aryal, A.; Brooks, B.A.; Reid, M.E.; Bawden, G.W.; Pawlak, G.R. Displacement Fields from Point Cloud Data: Application of Particle Imaging Velocimetry to Landslide Geodesy. J. Geophys. Res. Earth Surf. 2012, 117, 2011JF002161. [Google Scholar] [CrossRef]
- Brezzi, L.; Carraro, E.; Pasa, D.; Teza, G.; Cola, S.; Galgaro, A. Post-Collapse Evolution of a Rapid Landslide from Sequential Analysis with FE and SPH-Based Models. Geosciences 2021, 11, 364. [Google Scholar] [CrossRef]
- Brezzi, L.; Carraro, E.; Gabrieli, F.; Santa, G.D.; Cola, S.; Galgaro, A. Propagation Analysis and Risk Assessment of an Active Complex Landslide Using a Monte Carlo Statistical Approach. IOP Conf. Ser. Earth Environ. Sci. 2021, 833, 012130. [Google Scholar] [CrossRef]
- Teza, G.; Cola, S.; Brezzi, L.; Galgaro, A. Wadenow: A Matlab Toolbox for Early Forecasting of the Velocity Trend of a Rainfall-Triggered Landslide by Means of Continuous Wavelet Transform and Deep Learning. Geosciences 2022, 12, 205. [Google Scholar] [CrossRef]
- Reu, P. Stereo-Rig Design: Lens Selection—Part 3. Exp. Tech. 2013, 37, 1–3. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-0-521-54051-3. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Heikkila, J.; Silven, O. A Four-Step Camera Calibration Procedure with Implicit Image Correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar]
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- De La Escalera, A.; Armingol, J.M. Automatic Chessboard Detection for Intrinsic and Extrinsic Camera Parameter Calibration. Sensors 2010, 10, 2027–2044. [Google Scholar] [CrossRef]
- Piermattei, L.; Carturan, L.; De Blasi, F.; Tarolli, P.; Dalla Fontana, G.; Vettore, A.; Pfeifer, N. Suitability of Ground-Based SfM–MVS for Monitoring Glacial and Periglacial Processes. Earth Surf. Dyn. 2016, 4, 425–443. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object Modelling by Registration of Multiple Range Images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Gómez-Lahoz, J. An Automatic Procedure for Co-Registration of Terrestrial Laser Scanners and Digital Cameras. ISPRS J. Photogramm. Remote Sens. 2009, 64, 308–316. [Google Scholar] [CrossRef]
- Lichti, D.; Gordon, S.; Stewart, M.; Franke, J.; Tsakiri, M. Comparison of Digital Photogrammetry and Laser Scanning. In Proceedings of the International Society for Photogrammetry and Remote Sensing, Graz, Austria, 9 September 2002; pp. 39–44. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Zhou, B.; Khosla, A.; Lapedriza, A.; Torralba, A.; Oliva, A. Places: An Image Database for Deep Scene Understanding. arXiv 2016, arXiv:1610.02055. [Google Scholar] [CrossRef]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-Dimensional Digital Image Correlation for in-Plane Displacement and Strain Measurement: A Review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Gabrieli, F.; Corain, L.; Vettore, L. A Low-Cost Landslide Displacement Activity Assessment from Time-Lapse Photogrammetry and Rainfall Data: Application to the Tessina Landslide Site. Geomorphology 2016, 269, 56–74. [Google Scholar] [CrossRef]
- Teza, G.; Pesci, A.; Genevois, R.; Galgaro, A. Characterization of Landslide Ground Surface Kinematics from Terrestrial Laser Scanning and Strain Field Computation. Geomorphology 2008, 97, 424–437. [Google Scholar] [CrossRef]
- Wei, S.; Wang, C.; Yang, Y.; Wang, M. Physical and Mechanical Properties of Gypsum-Like Rock Materials. Adv. Civ. Eng. 2020, 2020, 3703706. [Google Scholar] [CrossRef]
- Liu, Y.; Brezzi, L.; Liang, Z.; Gabrieli, F.; Zhou, Z.; Cola, S. Image Analysis and LSTM Methods for Forecasting Surficial Displacements of a Landslide Triggered by Snowfall and Rainfall. Landslides 2024, 1–17. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
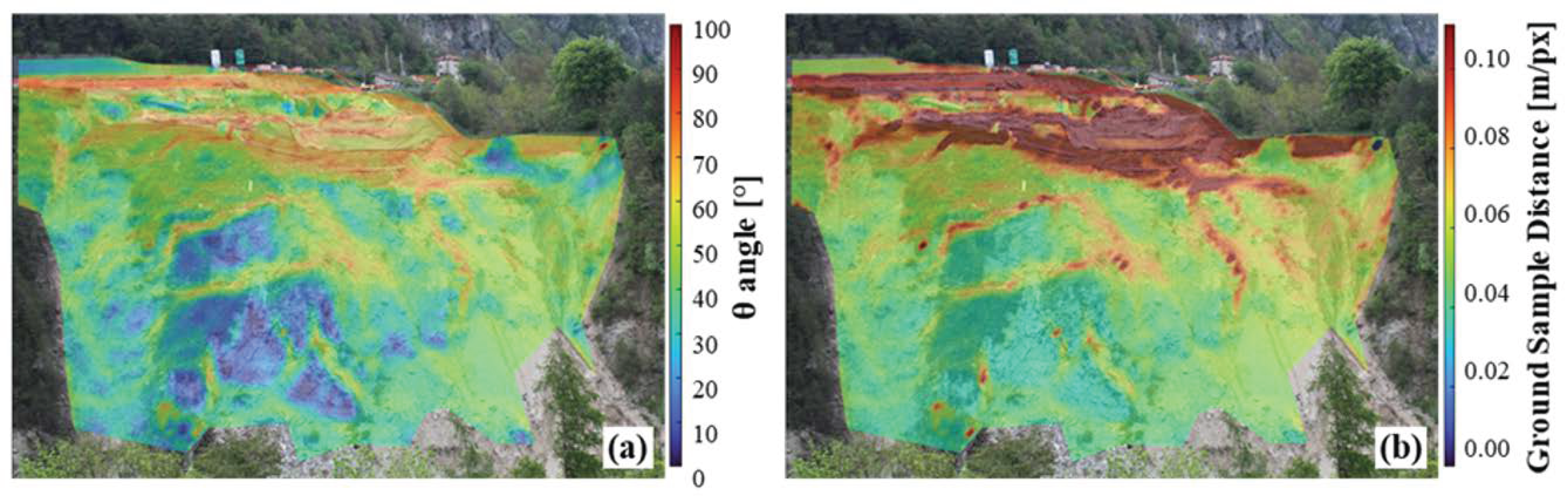
| Point | θ | d | GSD |
|---|---|---|---|
| A | Small | Short | Small |
| B | Large | Short | Medium |
| C | Small | Long | Medium |
| D | Large | Long | Large |
| Target Name | Annual Total Displacement (cm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 2014 | 2015 | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 | |
| N3 2 | - | - | - | - | 0.1 (166d) | 0.4 | 0.4 | 0.8 | 0.4 |
| P1 | 0.7 | 0.4 | 0.5 | 1.0 | 0.7 | 0.7 | 1.3 | 1.3 | 0.7 |
| N10 2 | - | - | - | - | 0.3 (166d) | 0.4 | 0.4 | 0.8 | 0.4 |
| GPS1 1 | - | - | 17.3 (226d) | 35.6 | 67.9 | 113.8 | 260.6 | 390.6 | 88.5 |
| N6 2 | - | - | - | - | 22.2 (166d) | n.a. | n.a. | 181.1 | 77.5 |
| P3 | 33.4 | 26.5 | 27.7 | 28.8 | 47.9 | n.a. | n.a. | 114.21 | n.a. |
| P28 1 | - | - | 15.9 (226d) | 28.6 | 51.5 | 75.5 | 172.5 | 276.4 | 65.8 |
| P24 1 | - | - | 16.4 (226d) | 31.2 | 66.0 | 81.0 | 177.6 | 278.8 | 62.8 |
| C1 3 | - | - | - | - | - | - | 54.9 (28d) | 287.7 | 43.6 |
| P4 | 36.7 | 27.9 | 31.4 | 34.9 | 62.5 | 103.2 | 232.0 | 345.9 | 87.4 |
| P8 | 36.3 | 28.3 | 30.0 | 32.3 | 52.8 | 81.0 | 186.0 | 352.1 | 101.4 |
| P13 | 34.7 | 27.5 | 27.5 | 27.9 | 44.3 | 71.3 | 166.2 | 297.2 | 72.3 |
| P19 | 34.4 | 24.2 | 28.1 | 32.0 | 54.6 | 85.4 | 187.1 | 283.7 | 58.8 |
| PR1 4 | - | - | - | - | - | - | - | 88.4 (64d) | n.a. |
| PR2 4 | - | - | - | - | - | - | - | 53.9 (64d) | n.a. |
| PR3 5 | - | - | - | - | - | - | - | 132.7 (257d) | 72.3 |
| PR4 5 | - | - | - | - | - | - | - | 120.5 (257d) | 67.2 |
| PR5 5 | - | - | - | - | - | - | - | 111.3 (257d) | 57.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brezzi, L.; Gabrieli, F.; Vallisari, D.; Carraro, E.; Pol, A.; Galgaro, A.; Cola, S. DIPHORM: An Innovative DIgital PHOtogrammetRic Monitoring Technique for Detecting Surficial Displacements of Landslides. Remote Sens. 2024, 16, 3199. https://doi.org/10.3390/rs16173199
Brezzi L, Gabrieli F, Vallisari D, Carraro E, Pol A, Galgaro A, Cola S. DIPHORM: An Innovative DIgital PHOtogrammetRic Monitoring Technique for Detecting Surficial Displacements of Landslides. Remote Sensing. 2024; 16(17):3199. https://doi.org/10.3390/rs16173199
Chicago/Turabian StyleBrezzi, Lorenzo, Fabio Gabrieli, Davide Vallisari, Edoardo Carraro, Antonio Pol, Antonio Galgaro, and Simonetta Cola. 2024. "DIPHORM: An Innovative DIgital PHOtogrammetRic Monitoring Technique for Detecting Surficial Displacements of Landslides" Remote Sensing 16, no. 17: 3199. https://doi.org/10.3390/rs16173199
APA StyleBrezzi, L., Gabrieli, F., Vallisari, D., Carraro, E., Pol, A., Galgaro, A., & Cola, S. (2024). DIPHORM: An Innovative DIgital PHOtogrammetRic Monitoring Technique for Detecting Surficial Displacements of Landslides. Remote Sensing, 16(17), 3199. https://doi.org/10.3390/rs16173199