
Wildfire Threshold Detection and Progression Monitoring Using an Improved Radar Vegetation Index in California

 ,
,  ,
,
Abstract
1. Introduction
2. Methods
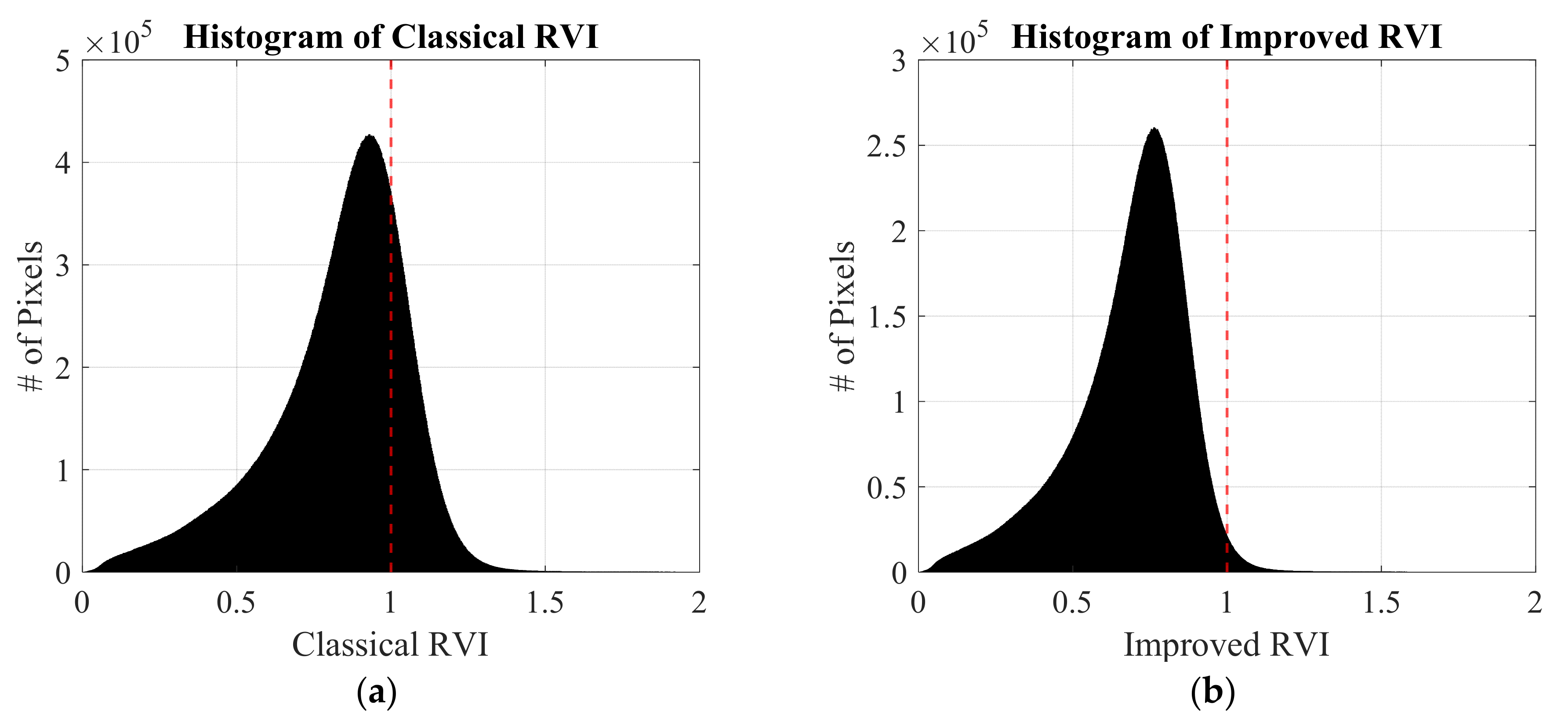
2.1. Radar Vegetation Index
2.2. Change Detection Method
2.3. Accuracy Assessment Metrics
3. Description of Data
3.1. UAVSAR Data
3.2. Wildfire Sites
4. Results and Analysis
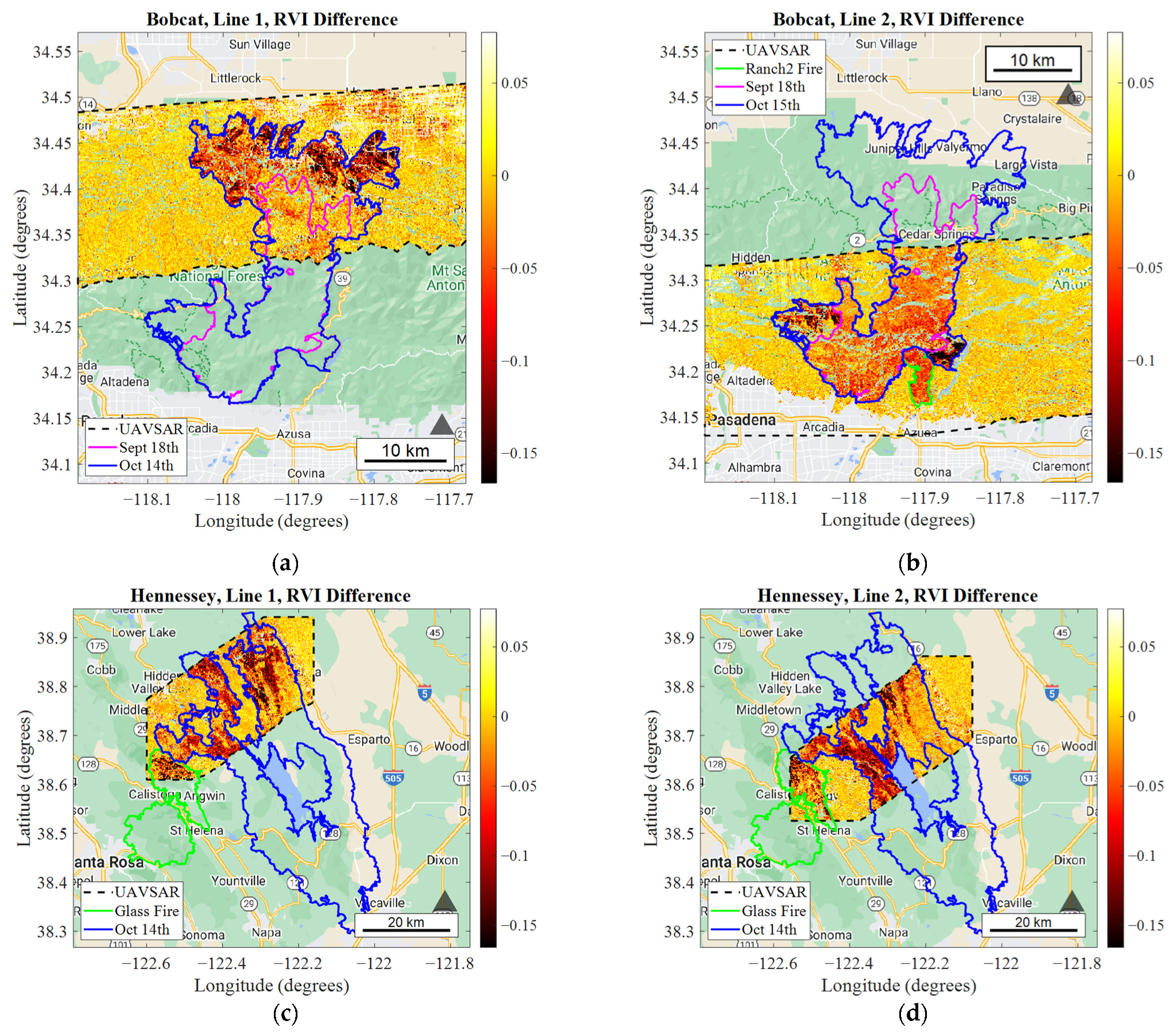
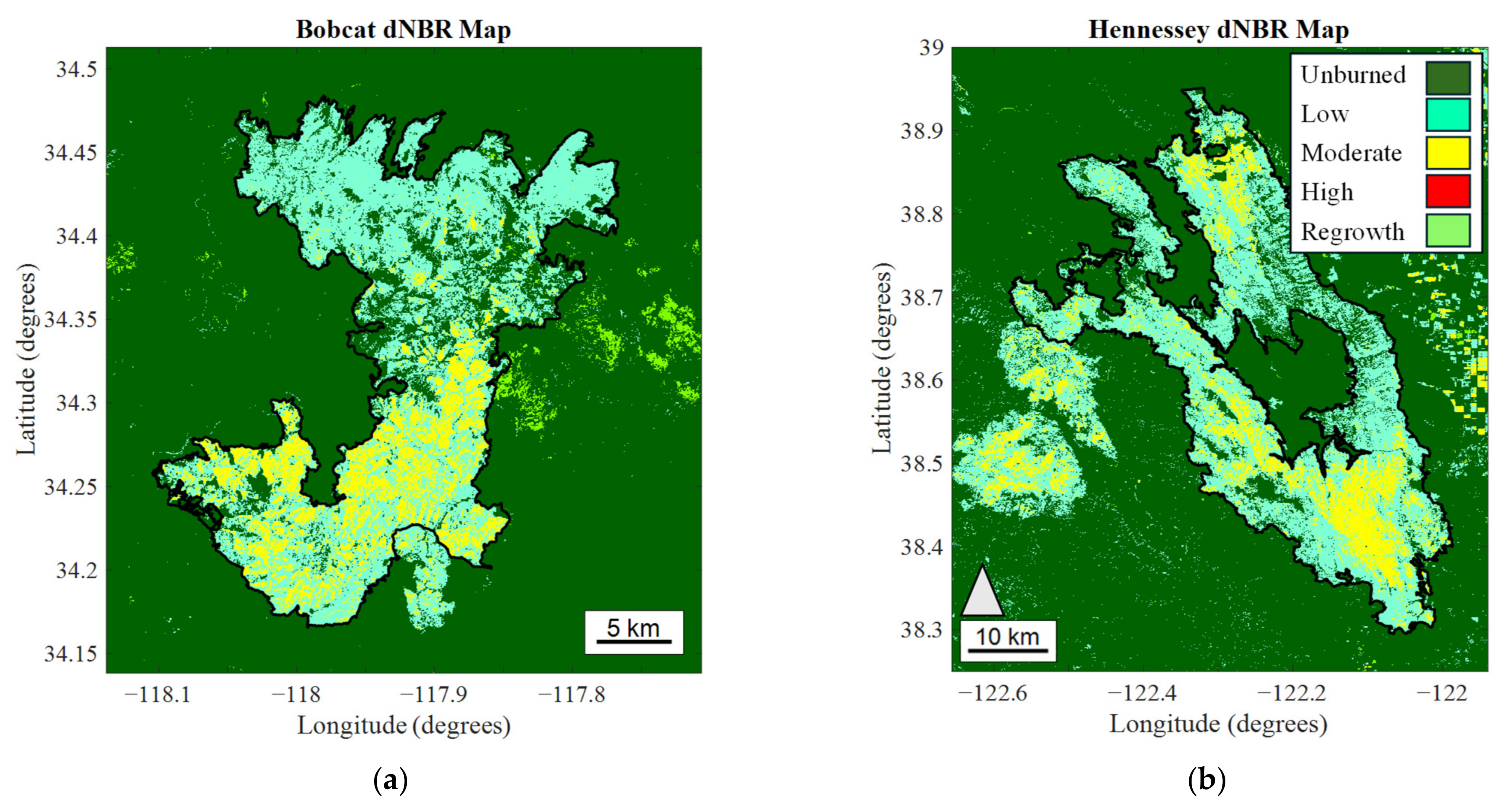
4.1. RVI Change Results
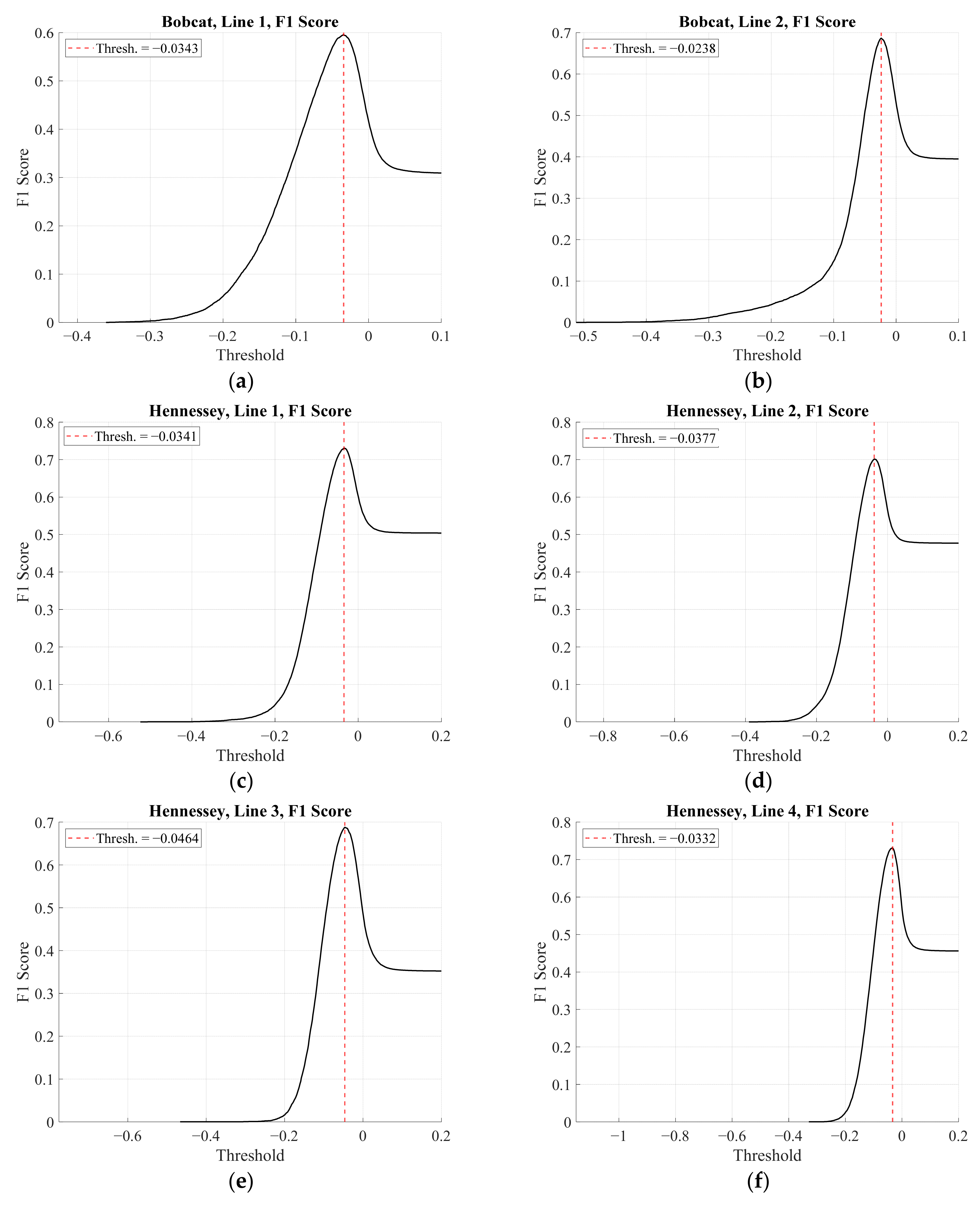
4.2. ROC Curves and F1 Score Results
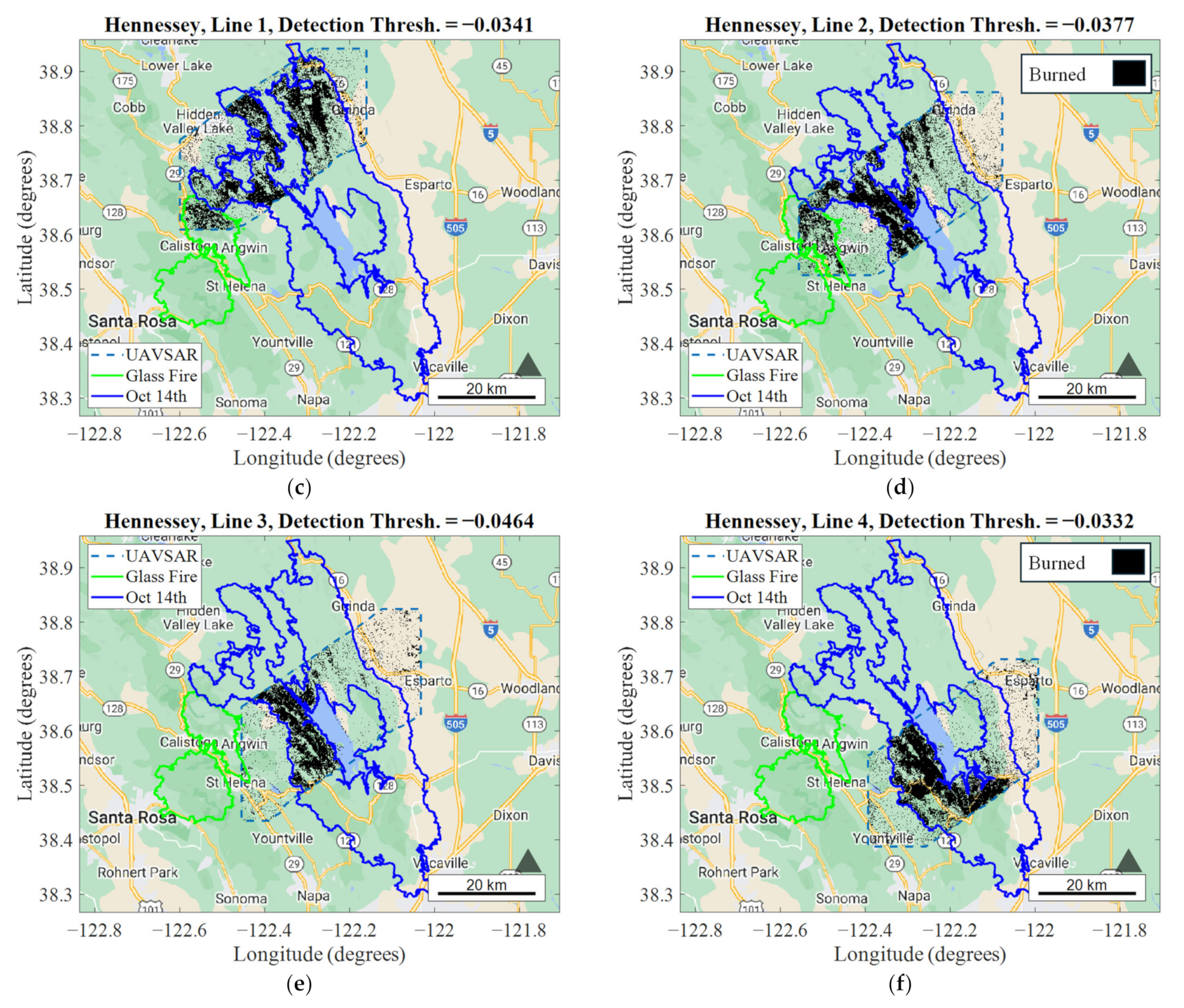
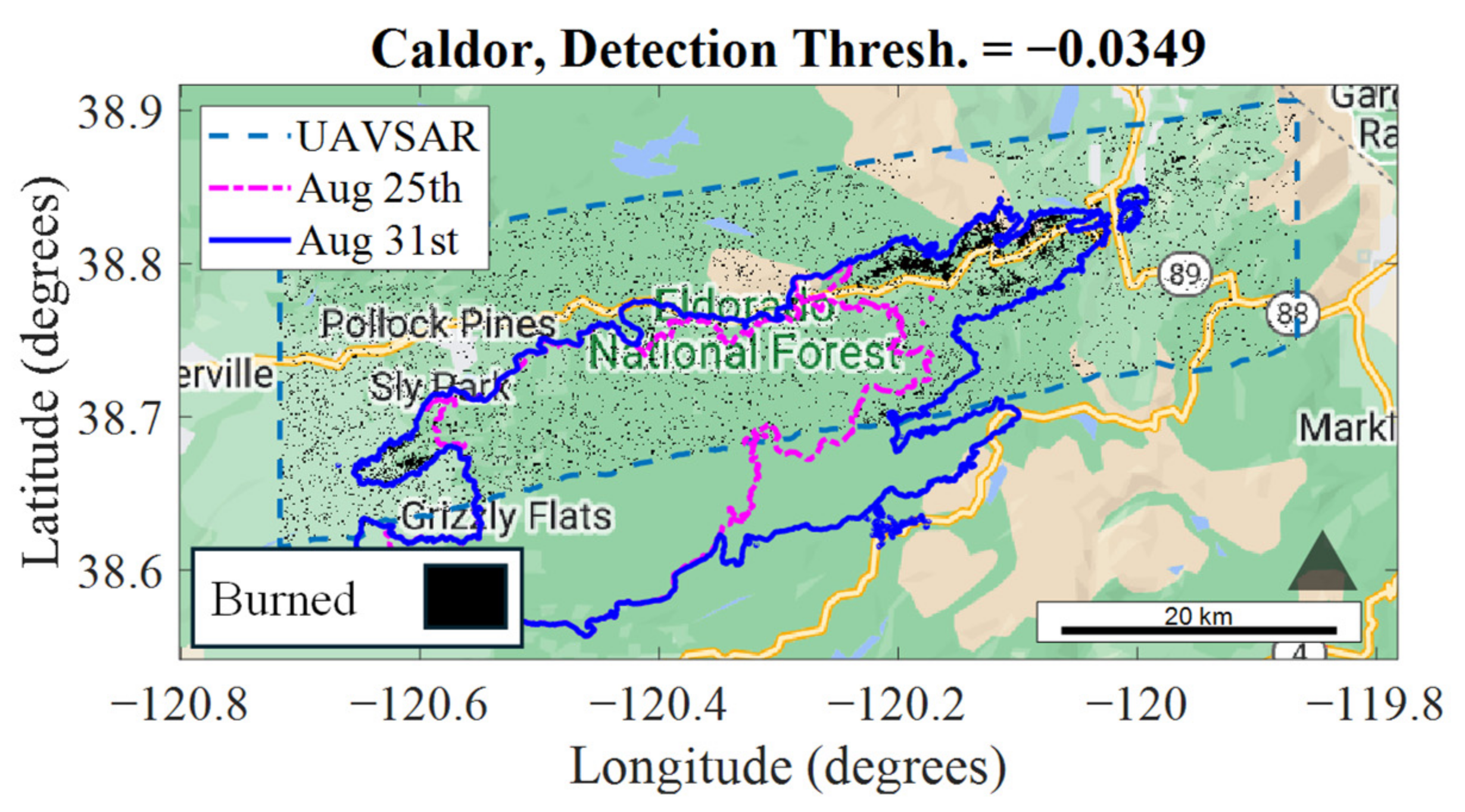
4.3. Threshold Detection Results
4.4. RVI Measurement Errors
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pausas, J.G.; Keeley, J.E. Wildfires as an ecosystem service. Front. Ecol. Environ. 2019, 17, 289–295. [Google Scholar] [CrossRef]
- Hutto, R.L. The Ecological Importance of Sever Wildfires: Some Like It Hot. Ecol. Appl. 2008, 18, 1827–1834. [Google Scholar] [CrossRef]
- Keane, R.E.; Agee, J.K.; Fule, P.; Keeley, J.E.; Key, C.; Kitchen, S.G.; Miller, R.; Schulte, L.A. Ecological effects of large fires on US Landscapes: Benefit or catastrophe? Int. J. Wildland Fire 2008, 17, 696–712. [Google Scholar] [CrossRef]
- Keane, R.E.; Karau, E. Evaluating the ecological benefits of wildfire by integrating fire and ecosystem simulation models. Ecol. Model. 2010, 221, 1162–1172. [Google Scholar] [CrossRef]
- Leblon, B.; Bourgeau-Chavez, L.; San-Miguel-Ayanz, J. Use of remote sensing in wildfire management. In Sustainable Development—Authoritative and Leading Edge Content for Environmental Management; IntechOpen: London, UK, 2012; pp. 55–82. [Google Scholar]
- Stavi, I. Wildfires in grasslands and shrublands: A review of impacts on vegetation, soil, hydrology, and geomorphology. Water 2019, 11, 1042. [Google Scholar] [CrossRef]
- Williams, A.P.; Abatzoglou, J.T.; Gershunov, A.; Guzman-Morales, J.; Bishop, D.A.; Balch, J.K.; Lettenmaier, D.P. Observed impacts of anthropogenic climate change on wildfire in California. Earth’s Future 2019, 7, 892–910. [Google Scholar] [CrossRef]
- Sharma, S.; Dhakal, K. Boots on the ground and eyes in the sky: A perspective on estimating fire danger from soil moisture content. Fire 2021, 4, 45. [Google Scholar] [CrossRef]
- Dennison, P.E.; Brewer, S.C.; Arnold, J.D.; Moritz, M.A. Large wildfire trends in the Western United States, 1984–2011. Geophys. Res. Lett. 2014, 41, 2928–2933. [Google Scholar] [CrossRef]
- National Interagency Coordination Center, Geographic Area Coordination Center. 2020 National Large Incident Year-to-Date Report. 2020. Available online: https://gacc.nifc.gov/sacc/predictive/intelligence/NationalLargeIncidentYTDReport.pdf (accessed on 20 January 2023).
- National Interagency Coordination Center. Wildland Fire Summary and Statistics Annual Report. 2020. Available online: https://www.nifc.gov/sites/default/files/NICC/2-Predictive%20Services/Intelligence/Annual%20Reports/2020/annual_report_0.pdf (accessed on 20 January 2023).
- California Department of Forestry and Fire Protection (CAL FIRE). 2020 Wildfire Activity Statistics (CALFIRE Redbook). 2020. Available online: https://34c031f8-c9fd-4018-8c5a-4159cdff6b0d-cdn-endpoint.azureedge.net/-/media/calfire-website/our-impact/fire-statistics/2020-wildfire-activity-stats.pdf?rev=da776d6b864342edb2fe0782b1afd9af&hash=17B19313E6A54CBE1D4693FAAC27F23C/ (accessed on 20 January 2023).
- Pereira, P.; Francos, M.; Brevik, E.C.; Ubeda, X.; Bogunovic, I. Post-fire Soil Management. Curr. Opin. Environ. Sci. Health 2018, 5, 26–32. [Google Scholar] [CrossRef]
- Kalabokidis, K.D. Effects of Wildfire Suppression Chemicals on People and the Environment—A Review. Glob. Nest Int. J. 2000, 2, 129–137. [Google Scholar]
- National Park Service. Fire Monitoring Handbook. Available online: https://www.nps.gov/orgs/1965/upload/fire-effects-monitoring-handbook.pdf (accessed on 1 December 2023).
- Allison, R.; Johnston, J.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef]
- Nolde, M.; Plank, S.; Riedlinger, T. Utilization of Hyperspectral Remote Sensing Imagery for Improving Burnt Area Mapping Accuracy. Remote Sens. 2021, 13, 5029. [Google Scholar] [CrossRef]
- Hua, L.; Shao, G. The Progress of Operational Forest Fire Monitoring with Infrared Remote Sensing. J. For. Res. 2016, 28, 215–229. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Rugege, D. Multispectral and Hyperspectral Remote Sensing for Identification and Mapping of Wetland Vegetation: A Review. Wetl. Ecol. Manag. 2009, 18, 281–296. [Google Scholar] [CrossRef]
- Hislop, S.; Jones, S.; Soto-Berelov, M.; Skidmore, A.; Haywood, A.; Nguyen, T.H. Using Landsat Spectral Indices in Time-Series to Assess Wildfire Disturbance and Recovery. Remote Sens. 2018, 10, 460. [Google Scholar] [CrossRef]
- João, T.; João, G.; Bruno, M.; João, H. Indicator-Based Assessment of Post-Fire Recovery Dynamics Using Satellite NDVI Time-Series. Ecol. Indic. 2018, 89, 199–212. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Long, D.G.; Blackwell, W.; Elachi, C.; Fung, A.; Ruf, C.; Sarabandi, K.; van Zyl, J.; Zebker, H. Microwave Radar and Radiometric Remote Sensing; The University of Michigan Press: Ann Arbor, MI, USA, 2017. [Google Scholar]
- European Space Agency (ESA). Copernicus Sentinel Data. 2021. Available online: https://browser.dataspace.copernicus.eu/ (accessed on 1 August 2023).
- Spoto, F.; Sy, O.; Laberinti, P.; Martimort, P.; Fernandez, V.; Colin, O.; Hoersch, B.; Meygret, A. Overview of Sentinel-2. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 1707–1710. [Google Scholar]
- Vermote, E. NOAA CDR Program, (2019): NOAA Climate Data Record (CDR) of AVHRR Normalized Difference Vegetation Index, Version 5, [2018–2022], NOAA National Centers for Environmental Information. Available online: https://www.ncei.noaa.gov/data/land-normalized-difference-vegetation-index/access/ (accessed on 1 August 2023).
- Moravec, D.; Komárek, J.; López-Cuervo Medina, S.; Molina, I. Effect of Atmospheric Corrections on NDVI: Intercomparability of Landsat 8, Sentinel-2, and UAV Sensors. Remote Sens. 2021, 13, 3550. [Google Scholar] [CrossRef]
- Tsai, Y.-L.S.; Dietz, A.; Oppelt, N.; Kuenzer, C. Remote Sensing of Snow Cover Using Spaceborne SAR: A Review. Remote Sens. 2019, 11, 1456. [Google Scholar] [CrossRef]
- United States Department of Agriculture, Forest Service. 2019 Forest Service-NASA Joint Applications Workshop: Satellite Data to Support Natural Resource Management: A Framework for Aligning NASA Products with Land Management Agency Needs. 2023. Available online: https://www.fs.usda.gov/rm/pubs_series/rmrs/gtr/rmrs_gtr436.pdf (accessed on 1 June 2024).
- Forgotson, C.; O’Neill, P.E.; Carrera, M.L.; Belair, S.; Das, N.N.; Mladenova, I.E.; Bolten, J.D.; Jacobs, J.M.; Cho, E.; Escobar, V.M. How Satellite Soil Moisture Data Can Help to Monitor the Impacts of Climate Change: SMAP Case Studies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1590–1596. [Google Scholar] [CrossRef]
- Bernardino, P.N.; Oliveira, R.S.; Van Meerbeek, K.; Hirota, M.; Furtado, M.N.; Sanches, I.A.; Somers, B. Estimating Vegetation Water Content from Sentinel-1 C-band SAR Data Over Savanna and Grassland Ecosystems. Environ. Res. Lett. 2024, 19, 034019. [Google Scholar] [CrossRef]
- Patil, A.; Singh, G.; Rüdiger, C. Retrieval of Snow Depth and Snow Water Equivalent Using Dual Polarization SAR Data. Remote Sens. 2020, 12, 1183. [Google Scholar] [CrossRef]
- Carstairs, H.; Mitchard, E.T.A.; McNicol, I.; Aquino, C.; Burt, A.; Ebanega, M.O.; Dikongo, A.M.; Bueso-Bello, J.-L.; Disney, M. An Effective Method for InSAR Mapping of Tropical Forest Degradation in Hilly Areas. Remote Sens. 2022, 14, 452. [Google Scholar] [CrossRef]
- Wanders, N.; Karssenberg, D.; de Roo, A.; de Jong, S.M.; Bierkens, M.F. The Suitability of Remotely Sensed Soil Moisture for Improving Operational Flood Forecasting. Hydrol. Earth Syst. Sci. 2014, 18, 2343–2357. [Google Scholar] [CrossRef]
- Horton, D.; Johnson, J.T.; Al-Khaldi, M.; Baris, I.; Park, J.; Bindlish, R. Soil Moisture During 2015 Spring Flood Events from the SMAP Radar Time-Series Ratio Algorithm. In Proceedings of the 2024 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Boulder, CO, USA, 9–12 January 2024; p. 352. [Google Scholar]
- Eswar, R.; Das, N.N.; Poulsen, C.; Behrangi, A.; Swigart, J.; Svoboda, M.; Entekhabi, D.; Yueh, S.; Doorn, B.; Entin, J. SMAP Soil Moisture Change as an Indicator of Drought Conditions. Remote Sens. 2018, 10, 788. [Google Scholar] [CrossRef]
- Olen, S.; Bookhagen, B. Mapping Damage-Affected Areas after Natural Hazard Events Using Sentinel-1 Coherence Time Series. Remote Sens. 2018, 10, 1272. [Google Scholar] [CrossRef]
- Ottmar, R.D. Wildland Fire Emissions, Carbon, and Climate: Modeling Fuel Consumption. For. Ecol. Manag. 2014, 317, 41–50. [Google Scholar] [CrossRef]
- Chen, H.; White, J.C.; Beaudoin, A. Derivation and Assessment of Forest-Relevant Polarimetric Indices Using RCM Compact-Pol Data. Int. J. Remote Sens. 2023, 44, 381–406. [Google Scholar] [CrossRef]
- Kim, Y.; van Zyl, J.J. A Time-series Approach to Estimate Soil Moisture Using Polarimetric Radar Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2519–2527. [Google Scholar]
- Saatchi, S. SAR Methods for Mapping and Monitoring Forest Biomass. In The SAR Handbook: Comprehensive Methodologies for Forest Monitoring and Biomass Estimation, 1st ed.; Flores-Anderson, A.I., Herndon, K.E., Thapa, R.B., Cherrington, E., Eds.; SilvaCarbon Program: Washington, DC, USA, 2019; pp. 207–246. [Google Scholar]
- Huang, Y.; Walker, J.P.; Gao, Y.; Wu, X.; Monerris, A. Estimation of Vegetation Water Content from the Radar Vegetation Index at L-band. IEEE Trans. Geosci. Remote Sens. 2016, 54, 981–989. [Google Scholar] [CrossRef]
- Kim, Y.; Jackson, T.; Bindlish, R.; Lee, H.; Hong, S. Radar Vegetation Index for Estimating the Vegetation Water Content of Rice and Soybean. IEEE Geosci. Remote Sens. Lett. 2012, 9, 564–568. [Google Scholar]
- Chang, J.G.; Shoshany, M.; Oh, Y. Polarimetric Radar Vegetation Index for Biomass Estimation in Desert Fringe Ecosystems. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7102–7108. [Google Scholar] [CrossRef]
- Szigarski, C.; Jagdhuber, T.; Baur, M.; Thiel, C.; Parrens, M.; Wigneron, J.-P.; Piles, M.; Entekhabi, D. Analysis of the Radar Vegetation Index and Potential Improvements. Remote Sens. 2018, 10, 1776. [Google Scholar] [CrossRef]
- Haldar, D.; Verma, A.; Kumar, S.; Chauhan, P. Estimation of Mustard and Wheat Phenology Using Multi-date Shannon Entropy and Radar Vegetation Index from Polarimetric Sentinel-1. Geocarto Int. 2021, 37, 5935–5962. [Google Scholar] [CrossRef]
- Thompson, A.A. Overview of the RADARSAT Constellation Mission. Can. J. Remote Sens. 2015, 41, 401–407. [Google Scholar] [CrossRef]
- NASA/ISRO Synthetic Aperture Radar Mission. NISAR Handbook. Available online: https://nisar.jpl.nasa.gov/system/documents/files/26_NISAR_FINAL_9-6-19.pdf (accessed on 1 May 2024).
- An, K.; Jones, C.; Lou, Y. Developing a Detection and Monitoring Framework for Wildfire Regimes with L-Band Polarimetric SAR. Submitted to AGU Earth and Space Science. 2023. Available online: https://essopenarchive.org/users/600587/articles/632138-developing-a-detection-and-monitoring-framework-for-wildfire-regimes-with-l-band-polarimetric-sar (accessed on 1 June 2024).
- Mandai, D.; Bhogapurapu, N.R.; Kumar, V.; Dey, S.; Ratha, D.; Bhattacharya, A.; Loper-Sanchez, J.M.; McNairn, H.; Rao, Y.S. Vegetation Monitoring Using a New Dual-POL Radar Vegetation Index: A Preliminary Study with Simulated NASA-ISRO SAR (NISAR) L-band Data. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October2020; pp. 4870–4873. [Google Scholar]
- NASA/JPL-Caltech. UAVSAR Data. Available online: https://uavsar.jpl.nasa.gov/cgi-bin/data.pl (accessed on 15 August 2023).
- Peterson, W.W.; Birdsall, T.G. The Theory of Signal Detectability. Trans. IRE Prof. Group Inf. Theory 1953, 4, 171–212. [Google Scholar] [CrossRef]
- Candy, J.; Breitfeller, E. Receiver Operating Characteristic (ROC) Curves: An Analysis Tool for Detection Performance. In No. LLNL-TR-642693; Lawrence Livermore National Lab: Livermore, CA, USA, 2013. [Google Scholar]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-score, with Implication for Evaluation. In Proceedings of the European Conference on Information Retrieval, Berlin/Heidelberg, Germany, 21–23 March 2005; pp. 345–359. [Google Scholar]
- Bechtel, T.; Capineri, L.; Windsor, C.; Inagaki, M.; Ivashov, S. Comparison of ROC Curves for Landmine Detection by Holographic Radar with ROC Data from Other Methods. In Proceedings of the 2015 8th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Florence, Italy, 7–10 July 2015; pp. 1–4. [Google Scholar]
- Chang, C.-I. An Effective Evaluation Tool for Hyperspectral Target Detection: 3D Receiver Operating Characteristic Curve Analysis. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5131–5153. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, G.; Chen, C.; Gao, S.; Yao, L. Compact Polarimetric Synthetic Aperture Radar for Target Detection: A Review. IEEE Geosci. Remote Sens. Mag. 2022, 10, 115–152. [Google Scholar] [CrossRef]
- Waldeland, A.; Reksten, J.; Salberg, A.-B. Avalanche Detection in SAR Images Using Deep Learning. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2386–2389. [Google Scholar]
- Rapuzzi, A.; Nattero, C.; Pelich, R.; Chini, M.; Campanella, P. CNN-based Building Footprint Detection from Sentinel-1 SAR Imagery. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1707–1710. [Google Scholar]
- Ng, W.; Wang, G.; Siddhartha; Lin, Z.; Dutta, B.J. Range-Doppler Detection in Automotive Radar with Deep Learning. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Palffy, A.; Dong, J.; Kooij, J.F.; Gavrila, D.M. CNN-Based Road User Detection Using the 3D Radar Cube. IEEE Robot. Autom. Lett. 2020, 5, 1263–1270. [Google Scholar] [CrossRef]
- California Department of Forestry and Fire Protection (CAL FIRE). Fire Perimeters Through. 2021. Available online: https://frap.fire.ca.gov/mapping/gis-data/ (accessed on 20 January 2023).
- Keeley, J.E. Fire Intensity, Fire Severity and Burn Severity: A Brief Review and Suggested Usage. Int. J. Wildland Fire 2009, 18, 116–126. [Google Scholar] [CrossRef]
- Roy, D.P.; Boschetti, L.; Trigg, S.N. Remote Sensing of Fire Severity: Assessing the Performance of the Normalized Burn Ratio. IEEE Geosci. Remote Sens. Lett. 2006, 3, 112–116. [Google Scholar] [CrossRef]
- Escuin, S.; Navarro, R.; Fernández, P. Fire Severity Assessment by Using NBR (Normalized Burn Ratio) and NDVI (Normalized Difference Vegetation Index) Derived from Landsat TM/ETM Images. Int. J. Remote Sens. 2007, 29, 1053–1073. [Google Scholar] [CrossRef]
- Cardil, A.; Mola-Yudego, B.; Blázquez-Casado, Á.; González-Olabarria, J.R. Fire and Burn Severity Assessment: Calibration of Relative Differenced Normalized Burn Ratio (RdNBR) with Field Data. J. Environ. Manag. 2019, 235, 342–349. [Google Scholar] [CrossRef]
- Loveland, T.R.; Irons, J.R. Landsat 8: The Plans, the Reality, and the Legacy. Remote Sens. Environ. 2016, 185, 1–6. [Google Scholar] [CrossRef]
- Landsat 8 Data Available from the U.S. Geological Survey. Available online: https://earthexplorer.usgs.gov/ (accessed on 10 December 2023).
- Liu, L. Encyclopedia of Database Systems; Springer: New York, NY, USA, 2009. [Google Scholar]
- Stoica, P.; Babu, P. Pearson–Matthews Correlation Coefficients for Binary and Multinary Classification. Signal Process 2024, 222, 109511. [Google Scholar] [CrossRef]
- Chicco, D.; Jurman, G. The Advantages of the Matthews Correlation Coefficient (MCC) over F1 Score and Accuracy in Binary Classification Evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef] [PubMed]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Matthews Correlation Coefficient (MCC) is More Informative than Cohen’s Kappa and Brier Score in Binary Classification Assessment. IEEE Access 2021, 9, 78368–78381. [Google Scholar] [CrossRef]
- Hensley, S.; Wheeler, K.; Sadowy, G.; Jones, C.; Shaffer, S.; Zebker, H.; Miller, T.; Heavey, B.; Chuang, E.; Chao, R.; et al. The UAVSAR Instrument: Description and First Results. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Kauffman, E. Climate and Topography. In Atlas of the Biodiversity of California; California Department of Fish and Wildlife, Ed.; California Department of Fish and Wildlife: Sacramento, CA, USA, 2024. [Google Scholar]
- Mooney, H.A.; Zavaleta, E. Ecosystems of California; University of California Press: Oakland, CA, USA, 2016. [Google Scholar]
- van Wagtendonk, J.W.; Sugihara, N.G.; Stephens, S.L.; Thode, A.E.; Shaffer, K.E.; Fites-Kaufman, J.; Keeley, J.E. Fire in California’s Ecosystems, 2nd ed.; University of California Press: Oakland, CA, USA, 2018. [Google Scholar]
- Keeley, J.E.; Syphard, A.D. Different Historical Fire–Climate Patterns in California. Int. J. Wildland Fire 2017, 26, 253–268. [Google Scholar] [CrossRef]
- United States Forest Service. Bobcat Fire. 2020. Available online: https://www.fs.usda.gov/Internet/FSE_DOCUMENTS/fseprd868759.pdf (accessed on 1 May 2024).
- Dewitz, J. National Land Cover Database (NLCD) 2019 Products (ver. 2.0, June 2021). U.S. Geological Survey Data. 2021. Available online: https://www.usgs.gov/centers/eros/science/national-land-cover-database (accessed on 10 January 2024).
- California Department of Forestry and Fire Protection (CAL FIRE). LNU Lightning Complex Fire Incident Report. 2020. Available online: https://www.fire.ca.gov/incidents/2020/8/17/lnu-lightning-complex/ (accessed on 1 May 2024).
- California Department of Forestry and Fire Protection (CAL FIRE). Caldor Fire Incident Report. 2021. Available online: https://www.fire.ca.gov/incidents/2021/8/14/caldor-fire/ (accessed on 1 August 2023).
- National Interagency Coordination Center. Wildland Fire Summary and Statistics Annual Report. 2021. Available online: https://www.nifc.gov/sites/default/files/NICC/2-Predictive%20Services/Intelligence/Annual%20Reports/2021/annual_report_0.pdf (accessed on 20 January 2023).
- National Aeronautics and Space Administration (NASA). NISAR Level 2 Scientific Requirements. Available online: https://nisar.jpl.nasa.gov/mission/mission-requirements/level-2-science-requirements/ (accessed on 1 May 2024).
- Eidenshink, J.; Schwind, B.; Brewer, K.; Zhu, Z.L.; Quayle, B.; Howard, S. A Project for Monitoring Trends in Burn Severity. Fire Ecol. 2007, 3, 3–21. [Google Scholar] [CrossRef]
- MTBS Data Access: Fire Level Burn Severity Geospatial Data (1984–2022). (2024, May—Last revised). MTBS Project (USDA Forest Service/U.S. Geological Survey). Available online: http://mtbs.gov/direct-download (accessed on 15 June 2024).
- LANDFIRE. Disturbance Layer 2020, LANDFIRE 2.0.0; U.S. Department of the Interior, Geological Survey, and U.S. Department of Agriculture: Washington, DC, USA, 2020. Available online: http://www.landfire.gov/viewer (accessed on 15 June 2024).
- NASA MASTER Team. Burn Severity and Fire Intensity Composites of the Bobcat Fire Captured by the MASTER Instrument on the NASA ER-2 Aircraft. ArcGIS Online. 2020. Available online: https://maps.disasters.nasa.gov/arcgis/home/item.html?id=2af9b2af0f9848f7b002fe4d47c7c927# (accessed on 15 June 2024).
- Mukherjee, S.; Siroratttanakul, K.; Vargas-Sanabria, D. Supplementing Earth Observation with Twitter Data to Improve Disaster Assessments: A Case Study of 2020 Bobcat Fire in Southern California. In Proceedings of the 72nd International Astronautical Congress (IAC), Dubai, United Arab Emirates, 25–29 October 2021. [Google Scholar]
- California Department of Forestry and Fire Protection (CAL FIRE)/California Department of Conservation Biological Survey. Watershed Emergency Response Team Evaluation LNU Lightning Complex Fire Hennessey Fire. 2020. Available online: https://scwa2.com/wp-content/uploads/2020/12/WERT.LNU-Lightning-Complex.Hennessey-Fire-ID-273408.pdf (accessed on 15 June 2024).
- LANDFIRE. Disturbance Layer 2021, LANDFIRE 2.0.0; U.S. Department of the Interior, Geological Survey, and U.S. Department of Agriculture: Washington, DC, USA, 2021. Available online: http://www.landfire.gov/viewer (accessed on 15 June 2024).
- United States Department of Agriculture Forest Service (USDA FS). Post-Fire Restoration Framework in Mixed Conifer Forests in the 2021 Caldor Fire, Eldorado National Forest and the Lake Tahoe Basin Management Unit: Restoration Opportunities in the 2021 Caldor Fire. Available online: https://www.fs.usda.gov/Internet/FSE_DOCUMENTS/fseprd1134862.pdf (accessed on 10 June 2024).
- Wasser, L.; Cattau, M. Calculate and Plot Difference Normalized Burn Ratio (dNBR) from Landsat Remote Sensing Data in R. Earth Lab. 2020. Available online: https://www.earthdatascience.org/courses/earth-analytics/multispectral-remote-sensing-modis/calculate-dNBR-R-Landsat/ (accessed on 20 July 2024).
- Singh, P.; Diwakar, M.; Shankar, A.; Shree, R.; Kumar, M. A Review on SAR Image and Its Despeckling. Arch. Comput. Methods Eng. 2021, 28, 4633–4653. [Google Scholar] [CrossRef]
- Singh, P.; Shree, R. Analysis and Effects of Speckle Noise in SAR Images. In Proceedings of the 2016 2nd International Conference on Advances in Computing, Communication, & Automation (ICACCA) (Fall), Bareilly, India, 30 September–1 October 2016; pp. 1–5. [Google Scholar]
- NASA Earth Observatory. Bobcat Fire Scorches Southern California. 2020. Available online: https://earthobservatory.nasa.gov/images/147324/bobcat-fire-scorches-southern-california (accessed on 20 July 2024).
- NASA Science. The Climate Connections of a Record Fire Year in the US West. 2020. Available online: https://science.nasa.gov/earth/climate-change/the-climate-connections-of-a-record-fire-year-in-the-us-west/ (accessed on 20 July 2024).
- Jones, J.; California Wildfires Triple Amid Drought after Record 2020 Fire Season. Newsweek. 2021. Available online: https://www.newsweek.com/california-wildfires-triple-amid-drought-after-record-2020-fire-season-1592706 (accessed on 20 July 2024).
- National Drought Mitigation Center; U.S. Department of Agriculture; National Oceanic and Atmospheric Administration. United States Drought Monitor: State of California in 2020; University of Nebraska-Lincoln: Lincoln, NE, USA, 2023. [Google Scholar]
- Yang, J.; Zhong, L.; Yuan, X.; Wang, X.; Han, B.; Hu, Y. First Assessment of Noise-Equivalent Sigma-Zero in GF3-02 TOPSAR Mode with Sea Surface Wind Speed Retrieval. Acta Oceanol. Sin. 2023, 42, 84–96. [Google Scholar] [CrossRef]
- Fore, A.G.; Chapman, B.D.; Hawkins, B.P.; Hensley, S.; Jones, C.E.; Michel, T.R.; Muellerschoen, R.J. UAVSAR Polarimetric Calibration. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3481–3491. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric Analysis of Backscatter from the Deepwater Horizon Oil Spill Using L-band Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fire Name: | Date: | Landsat File: |
|---|---|---|
| Bobcat Fire | 5 September 2020 | LC08_L2SP_041036_20200905_20200918_02_T1 |
| Bobcat Fire | 10 October 2020 | LC08_L2SP_041036_20201007_20220526_02_T1 |
| Hennessey Fire | 9 August 2020 | LC08_L2SP_044033_20200809_20200918_02_T1 |
| Hennessey Fire | 12 October 2020 | LC08_L2SP_044033_20201012_20201105_02_T1 |
| UAVSAR Characteristic | Quantity/Value |
|---|---|
| Radar Type | Synthetic Aperture Radar |
| Frequency | 1.26 GHz |
| Wavelength | 23.79 cm |
| Bandwidth | 80 MHz |
| Polarization | Full Pol (HH, VV, HV, VH) |
| Swath Width | 16 km |
| Incidence Angle | 25 degrees–65 degrees |
| Transmit Power | 3.1 kW |
| Altitude | 2000–18,000 m |
| Inherent Spatial Resolution | ~1.8 m |
| Products Used | MLC, Ground Range Projected Intensity |
| Resolution: | Threshold: | F1 Score: | Pd: | Pfa: |
|---|---|---|---|---|
| Bobcat, Line 1 | ||||
| 5 m | −0.0657 | 0.3933 | 43.81% | 17.16% |
| 25 m | −0.0582 | 0.4351 | 45.13% | 13.72% |
| 50 m | −0.0466 | 0.5007 | 49.61% | 10.66% |
| 100 m | −0.0343 | 0.5953 | 57.33% | 7.86% |
| 200 m | −0.0248 | 0.6831 | 67.26% | 6.71% |
| 500 m | −0.0166 | 0.7399 | 78.08% | 7.44% |
| Bobcat, Line 2 | ||||
| 5 m | −0.0264 | 0.4437 | 55.89% | 30.51% |
| 25 m | −0.0274 | 0.4841 | 56.67% | 24.58% |
| 50 m | −0.0280 | 0.5627 | 58.90% | 16.13% |
| 100 m | −0.0238 | 0.6865 | 67.89% | 9.71% |
| 200 m | −0.0176 | 0.7973 | 81.67% | 7.79% |
| 500 m | −0.0151 | 0.8923 | 91.86% | 4.86% |
| Hennessey, Line 1 | ||||
| 5 m | −0.0370 | 0.5735 | 63.55% | 28.78% |
| 25 m | −0.0422 | 0.6159 | 63.22% | 20.96% |
| 50 m | −0.0390 | 0.6694 | 66.85% | 16.45% |
| 100 m | −0.0341 | 0.7305 | 71.29% | 12.13% |
| 200 m | −0.0294 | 0.7721 | 76.17% | 10.90% |
| 500 m | −0.0252 | 0.7984 | 82.51% | 12.52% |
| Hennessey, Line 2 | ||||
| 5 m | −0.0361 | 0.53689 | 61.58% | 22.38% |
| 25 m | −0.0406 | 0.5775 | 61.28% | 23.25% |
| 50 m | −0.0412 | 0.6312 | 62.75% | 16.43% |
| 100 m | −0.0377 | 0.7010 | 66.46% | 10.56% |
| 200 m | −0.0294 | 0.7558 | 73.40% | 9.55% |
| 500 m | −0.0279 | 0.7912 | 77.24% | 8.09% |
| Hennessey, Line 3 | ||||
| 5 m | −0.0512 | 0.4755 | 56.28% | 22.38% |
| 25 m | −0.0532 | 0.5240 | 56.57% | 16.49% |
| 50 m | −0.0491 | 0.5952 | 61.02% | 12.12% |
| 100 m | −0.0464 | 0.6879 | 65.60% | 6.82% |
| 200 m | −0.0384 | 0.7636 | 74.22% | 5.38% |
| 500 m | −0.0347 | 0.8080 | 79.05% | 4.31% |
| Hennessey, Line 4 | ||||
| 5 m | −0.0389 | 0.5693 | 62.08% | 23.97% |
| 25 m | −0.403 | 0.6092 | 63.16% | 18.97% |
| 50 m | −0.0419 | 0.6652 | 64.75% | 12.71% |
| 100 m | −0.0332 | 0.7309 | 71.98% | 10.47% |
| 200 m | −0.0237 | 0.7792 | 74.13% | 6.72% |
| 500 m | −0.0307 | 0.81656 | 78.11% | 5.47% |
| Site: | 5m: | 25 m: | 50 m: | 100 m: | 200 m: | 500 m: |
|---|---|---|---|---|---|---|
| Bobcat Line 1 | 0.2467 | 0.3055 | 0.3924 | 0.5099 | 0.6129 | 0.6788 |
| Bobcat Line 2 | 0.2254 | 0.2934 | 0.4153 | 0.5863 | 0.7274 | 0.8542 |
| Hennessey Line 1 | 0.3336 | 0.4173 | 0.5043 | 0.5991 | 0.6571 | 0.6896 |
| Hennessey Line 2 | 0.2901 | 0.3694 | 0.4647 | 0.5770 | 0.6492 | 0.7011 |
| Hennessey Line 3 | 0.3060 | 0.3808 | 0.4805 | 0.6094 | 0.7034 | 0.7599 |
| Hennessey Line 4 | 0.3651 | 0.4334 | 0.5289 | 0.6207 | 0.6955 | 0.7469 |
| Resolution | Threshold |
|---|---|
| 5 m | −0.0425 |
| 25 m | −0.0436 |
| 50 m | −0.0410 |
| 100 m | −0.0349 |
| 200 m | −0.0287 |
| 500 m | −0.0250 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Horton, D.; Johnson, J.T.; Baris, I.; Jagdhuber, T.; Bindlish, R.; Park, J.; Al-Khaldi, M.M. Wildfire Threshold Detection and Progression Monitoring Using an Improved Radar Vegetation Index in California. Remote Sens. 2024, 16, 3050. https://doi.org/10.3390/rs16163050
Horton D, Johnson JT, Baris I, Jagdhuber T, Bindlish R, Park J, Al-Khaldi MM. Wildfire Threshold Detection and Progression Monitoring Using an Improved Radar Vegetation Index in California. Remote Sensing. 2024; 16(16):3050. https://doi.org/10.3390/rs16163050
Chicago/Turabian StyleHorton, Dustin, Joel T. Johnson, Ismail Baris, Thomas Jagdhuber, Rajat Bindlish, Jeonghwan Park, and Mohammad M. Al-Khaldi. 2024. "Wildfire Threshold Detection and Progression Monitoring Using an Improved Radar Vegetation Index in California" Remote Sensing 16, no. 16: 3050. https://doi.org/10.3390/rs16163050
APA StyleHorton, D., Johnson, J. T., Baris, I., Jagdhuber, T., Bindlish, R., Park, J., & Al-Khaldi, M. M. (2024). Wildfire Threshold Detection and Progression Monitoring Using an Improved Radar Vegetation Index in California. Remote Sensing, 16(16), 3050. https://doi.org/10.3390/rs16163050