
A Multi-Objective Intelligent Optimization Method for Sensor Array Optimization in Distributed SAR-GMTI Radar Systems

Abstract
:1. Introduction
- We established a functional model to describe the influence of array configuration on GMTI performance based on the CCM model and SCNR-Loss model. It provides a way to build a bridge between the array configuration, the non-ideal factors of the detection environment, and the GMTI performance of distributed radar.
- We proposed a multi-objective optimization problem for array arrangement design. Three objective functions were derived corresponding to three indicators of SAR-GMTI performance, including the width of the filtering “notch” (or MDV), the magnitude of the clutter suppression ability, and the probability of target blind speed. It provides a fresh idea for radar system performance optimization.
- We introduced the Pareto optimization mechanism to solve MOP. This approach can balance the conflicts between different objective functions (or GMTI performance indicators) and improve at least one indicator while not worsening the other criteria.
- To improve the optimal solution as well as speed up the convergence of the snake optimization algorithm, an improved method, IMOSOA, was proposed for the initialization and evolutionary process. That is, we introduced tent chaotic mapping to generate initial solutions, applied the multi-group cooperative strategy to increase population diversity, and increased the probability of individual mutation to reduce the risk of local convergence.
2. Signal Model and Problem Statement
2.1. Signal Model of Distributed Array Radar
2.1.1. Geometry Model
2.1.2. Clutter and Target Space–Time Signal Model
2.2. Problem Statement
2.2.1. GMTI Performance Model of STAP
2.2.2. Construction of Clutter Covariance Matrix
3. Methodology of Proposed IMOSOA
3.1. Objective Function Definition and Formulation
3.1.1. Percentage of Undetectable Interval
3.1.2. Average Processing Loss
3.1.3. STD of Output SCNR-Loss
3.2. Improved Multi-Objective Snake Optimization Algorithm
3.2.1. Initialization Strategy
3.2.2. Multiple Group Collaboration Strategy
3.2.3. Individual Mutation Strategy
3.2.4. Implementation of IMOSOA
4. Experimental Results and Analysis
4.1. Experimental Parameters
4.2. Optimization Result Evaluation
4.3. Performance of IMOSOA
4.3.1. Solution Quality Evaluation
4.3.2. Convergence Speed Comparison
4.4. Discussion of the Improvement of IMOSOA
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- Pareto optimization mechanism
- 2.
- Review of Snake Optimization
- a.
- Initialization process
- b.
- Solution update
References
- Yang, L.; Wang, T.; Bao, Z. Ground Moving Target Indication Using an InSAR System with a Hybrid Baseline. IEEE Trans. Geosci. Remote Sens. Lett. 2008, 5, 373–377. [Google Scholar] [CrossRef]
- Budillon, A.; Gierull, C.H.; Pascazio, V.; Schirinzi, G. Along-Track Interferometric SAR Systems for Ground-Moving Target Indication: Achievements, Potentials, and Outlook. IEEE Geosci. Remote Sens. Mag. 2020, 8, 46–63. [Google Scholar] [CrossRef]
- Wendleder, A.; Wessel, B.; Roth, A.; Breunig, M.; Martin, K.; Wagenbrenner, S. TanDEM-X water indication mask: Generation and first evaluation results. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 171–179. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Dual-Platform Large Along-Track Baseline GMTI. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1554–1574. [Google Scholar] [CrossRef]
- Rocca, P.; Haupt, R.L.; Massa, A. Sidelobe Reduction Through Element Phase Control in Uniform Subarrayed Array Antennas. IEEE Antennas Wirel. Propag. Lett. 2009, 8, 437–440. [Google Scholar] [CrossRef]
- Li, X.; Yang, Z.; Tan, X.; Liao, G.; Shu, Y. A Novel Knowledge-aided Training Samples Selection Method for Terrain Clutter Suppression in Hybrid Baseline Radar Systems. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Li, X.; Yang, Z.; He, S.; Huang, P.; Liao, G.; Jiang, Y. Nonhomogeneous clutter suppression based on terrain elevation interferometric phase compensation in multi-satellite formation systems. Digit. Signal Process. 2022, 121, 103282. [Google Scholar] [CrossRef]
- Li, X.; Wu, X.; Yang, Z.; Liao, G. A Closed-Form Expression of STAP Performance for Distributed Aperture Coherence MIMO Radar. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Li, W.T.; Shi, X.W.; Hei, Y.Q.; Liu, S.F.; Zhu, J. A Hybrid Optimization Algorithm and Its Application for Conformal Array Pattern Synthesis. IEEE Trans. Antennas Propag. 2010, 58, 3401–3406. [Google Scholar] [CrossRef]
- Yang, K. Optimisation method on conformal array element positions for low sidelobe pattern synthesis. IET Microw. Antennas Propag. 2012, 6, 646–652. [Google Scholar] [CrossRef]
- Li, H.; Jiang, Y.; Ding, Y.; Tan, J.; Zhou, J. Low-Sidelobe Pattern Synthesis for Sparse Conformal Arrays Based on PSO-SOCP Optimization. IEEE Access 2018, 6, 77429–77439. [Google Scholar] [CrossRef]
- Isernia, T.; Pena, F.J.A.; Bucci, O.M.; D’Urso, M.; Gomez, J.; Rodriguez, J. A hybrid approach for the optimal synthesis of pencil beams through array antennas. IEEE Trans. Antennas Propag. 2004, 52, 2912–2918. [Google Scholar] [CrossRef]
- Jarske, P.; Saramaki, T.; Mitra, S.K.; Neuvo, Y. On properties and design of nonuniformly spaced linear arrays (antennas). IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 372–380. [Google Scholar] [CrossRef]
- D’Urso, M.; Prisco, G.; Tumolo, R.M. Maximally sparse, steerable, and nonsuperdirective array antennas via convex optimizations. IEEE Trans. Antennas Propag. 2016, 64, 3840–3849. [Google Scholar] [CrossRef]
- Yang, F.; Yang, S.; Chen, Y.; Qu, S.; Hu, J. Synthesis of sparse antenna arrays subject to constraint on directivity via iterative convex optimization. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1498–1502. [Google Scholar] [CrossRef]
- Gong, Y.; Shaoqiu, X.; Zheng, Y.; Wang, B. Synthesis of multiplepattern planar arrays by the multitask Bayesian compressive sensing. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1587–1591. [Google Scholar] [CrossRef]
- Elbir, A.; Mishra, K. Joint antenna selection and hybrid beamformer design using unquantized and quantized deep learning network. IEEE Trans. Wirel. Commun. 2020, 19, 1677–1688. [Google Scholar] [CrossRef]
- Hamza, S.A.; Amin, M.G. Sparse Array Design for Optimum Beamforming Using Deep Learning. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 133–144. [Google Scholar] [CrossRef]
- Chen, K.; Yun, X.; He, Z.; Han, C. Synthesis of sparse planar arrays using modified real genetic algorithm. IEEE Trans. Antennas Propag. 2007, 55, 1067–1073. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, S.; Guo, Q.; Li, M. Synthesis of uniformly excited concentric ring arrays using the improved integer GA. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1124–1127. [Google Scholar] [CrossRef]
- Rocca, P.; Manica, L.; Stringari, F.; Massa, A. Ant colony optimization for tree-searching based synthesis of monopulse array antenna. Electron. Lett. 2008, 44, 783–785. [Google Scholar] [CrossRef]
- Oliveri, G.; Poli, L. Optimal sub-arraying of compromise planar arrays through an innovative ACO-weighted procedure. Prog. Electromag. Res. 2010, 109, 279–299. [Google Scholar] [CrossRef]
- Nouiri, M.; Bekrar, A.; Jemai, A.; Niar, S.; Ammari, A.C. An effective and distributed particle swarm optimization algorithm for flexible job-shop scheduling problem. J. Intell. Manuf. 2015, 29, 603–615. [Google Scholar] [CrossRef]
- Zhou, R.; Sun, J.; Wei, S.; Wang, J. Synthesis of conformal array antenna for hypersonic platform SAR using modified particle swarm optimization. IET Radar Sonar Navig. 2017, 11, 1235–1242. [Google Scholar] [CrossRef]
- Chhikara, R.R.; Sharma, P.; Singh, L. An improved dynamic discrete firefly algorithm for blind image steganalysis. Int. J. Mach. Learn. Cyber. 2016, 9, 821–835. [Google Scholar] [CrossRef]
- Smith, J.S.; Baginski, M.E. Thin-Wire Antenna Design Using a Novel Branching Scheme and Genetic Algorithm Optimization. IEEE Trans. Antennas Propag. 2019, 67, 2934–2941. [Google Scholar] [CrossRef]
- Li, Y.; Luo, J. Multi-objective self-organizing optimization for constrained sparse array synthesis. Swarm Evol. Comput. 2020, 58, 100743. [Google Scholar] [CrossRef]
- Cheng, Y.-F.; Shao, W.; Zhang, S.-J.; Li, Y.-P. An Improved Multi-Objective Genetic Algorithm for Large Planar Array Thinning. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Cao, A.; Li, H.; Ma, S.; Jing, T.; Zhou, J. Sparse circular array pattern optimization based on MOPSO and convex optimization. In Proceedings of the 2015 Asia-Pacific Microwave Conference (APMC), Nanjing, China, 6–9 December 2015; pp. 1–3. [Google Scholar]
- Ishibuchi, H.; Masuda, H.; Nojima, Y. Pareto fronts of many objective degenerate test problems. IEEE Trans. Evolut. Comput. 2016, 20, 807–813. [Google Scholar] [CrossRef]
- Ngatchou, P.; Zarei, A.; El-Sharkawi, A. Pareto Multi-objective Optimization. In Modern Heuristic Optimization Techniques; Lee, K.Y., El-Sharkawi, M.A., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; pp. 189–207. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Erkoc, M.E.; Karaboga, N. A Novel Sparse Reconstruction Method based on Multi-objective Artificial Bee Colony Algorithm. Signal Process. 2021, 189, 108283. [Google Scholar] [CrossRef]
- Mirjalili, S.; Jangir, P.; Saremi, S. Multi-objective ant lion optimizer: A multi-objective optimization algorithm for solving engineering problems. Appl. Intell. 2016, 46, 79–95. [Google Scholar] [CrossRef]
- Rodrigues, D.; Albuquerque, V.H.C.D.; Papa, J.P. A Multi-Objective Artificial Butterfly Optimization Approach for Feature Selection. Appl. Soft Comput. 2020, 94, 106442. [Google Scholar] [CrossRef]
- Cheng, Z.; Wang, J. A new combined model based on multi-objective salp swarm optimization for wind speed forecasting. Appl. Soft Comput. 2020, 92, 106294. [Google Scholar] [CrossRef]
- Brennan, L.E.; Reed, L.S. Theory of Adaptive Radar. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 237–252. [Google Scholar] [CrossRef]
- Ender, J.H.G. Space-time processing for multichannel synthetic aperture radar. Electron. Commun. Eng. J. 1999, 11, 29–38. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I.; Gierull, C.H. Optimum SAR/GMTI Processing and Its Application to the Radar Satellite RADARSAT-2 for Traffic Monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3868–3881. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J.; Peng, Y. Detection of heterogeneous samples based on loaded generalized inner product method. Digit. Signal Process. 2012, 22, 605–613. [Google Scholar] [CrossRef]
- Xu, H.; Yang, Z.; He, S.; Tian, M.; Liao, G.; Sun, Y. A generalized sample weighting method in heterogeneous environment for space-time adaptive processing. Digit. Signal Process. 2018, 72, 147–159. [Google Scholar] [CrossRef]
- Melvin, W.L.; Showman, G.A. An approach to knowledge-aided covariance estimation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1021–1042. [Google Scholar] [CrossRef]
- Yang, Z.C.; de Lamare, R.C. Enhanced knowledge-aided space-time adaptive processing exploiting inaccurate prior knowledge of the array manifold. Digit. Signal Process 2016, 60, 262–276. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Zhang, Y.; Guo, Y. Robust nonhomogeneous training samples detection method for space-time adaptive processing radar using sparse-recovery with knowledge-aided. J. Appl. Remote Sens. 2017, 11, 045013. [Google Scholar] [CrossRef]
- Bento, M.; Ramon, P.; Luis, C. Considerations About Forward Fuselage Aerodynamic Design of a Transport Aircraft. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 5–8 January 2004. [Google Scholar]
- Gracheva, V.; Ender, J. Multichannel Analysis and Suppression of Sea Clutter for Airborne Microwave Radar Systems. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2385–2399. [Google Scholar] [CrossRef]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; MIT Lincoln Lab: Lexington, MA, USA, 1994. [Google Scholar]
- Wang, H.; Fang, D.G.; Chow, Y.L. Grating lobe reduction in a phased array of limited scanning. IEEE Trans. Antennas Propag. 2008, 56, 1581–1586. [Google Scholar] [CrossRef]
- Gonzalez, J.H.; Bachmann, M.; Krieger, G.; Fiedler, H. Development of the TanDEM-X Calibration Concept: Analysis of Systematic Errors. IEEE Trans. Geosci. Remote Sens. 2010, 48, 716–726. [Google Scholar] [CrossRef]
- Huang, P.; Xia, X.; Liu, X.; Jiang, X.; Chen, J.; Liu, Y. A Novel Baseline Estimation Method for Multichannel HRSW SAR System. IEEE Trans. Geosci. Remote Sens. Lett. 2019, 16, 1829–1833. [Google Scholar] [CrossRef]
- Guerci, J.R. Theory and application of covariance matrix tapers for robust adaptive beamforming. IEEE Trans. Signal Process. 1999, 47, 977–985. [Google Scholar] [CrossRef]
- Chen, C.W. A Spectral Model for Multilook InSAR Phase Noise Due to Geometric Decorrelation. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–11. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef]
- Rizzoli, P.; Braeutigam, B.; Kraus, T.; Martone, M.; Krieger, G. Relative height error analysis of TanDEM-X elevation data. ISPRS J. Photogramm. Remote Sens. 2012, 73, 30–38. [Google Scholar] [CrossRef]
- Ke, L.; Zhang, Q.; Battiti, R. Hybridization of decomposition and local search for multiobjective optimization. IEEE Trans. Cybern. 2014, 44, 1808–1820. [Google Scholar]
- Li, Y.; Han, M.; Guo, Q. Modified Whale Optimization Algorithm Based on Tent Chaotic Mapping and Its Application in Structural Optimization. KSCE J. Civ. Eng. 2020, 24, 3703–3713. [Google Scholar] [CrossRef]
- Liu, F.; Liu, Y.; Han, F.; Ban, Y.-L.; Guo, Y.J. Synthesis of large unequally spaced planar arrays utilizing differential evolution with new encoding mechanism and Cauchy mutation. IEEE Trans. Antennas Propag. 2020, 68, 4406–4416. [Google Scholar] [CrossRef]
- Deb, K. Multi-objective optimisation using evolutionary algorithms: An introduction. In Multi-Objective Evolutionary Optimisation for Product Design and Manufacturing; Springer: London, UK, 2011; pp. 3–34. [Google Scholar]
- Knowles, J.; Corne, D. The Pareto archived evolution strategy: A new baseline algorithm for Pareto multiobjective optimisation. In Proceedings of the 1999 Congress on Evolutionary Computation (CEC99), Washington, DC, USA, 6–9 July 1999; Volume 1, pp. 98–105. [Google Scholar]
- Zhou, A.; Qu, B.-Y.; Li, H.; Zhao, S.-Z.; Suganthan, P.N.; Zhang, Q. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm Evol. Comput. 2011, 1, 32–49. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Global Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly algorithm, stochastic test functions and design optimization. Int. J. Bio-Inspired Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Assiri, A.S.; Hussien, A.G.; Amin, M. Ant lion optimization: Variants, hybrids, and applications. IEEE Access 2020, 8, 77746–77764. [Google Scholar] [CrossRef]
- Hussien, A.G.; Amin, M. A self-adaptive harris hawks optimization algorithm with opposition-based learning and chaotic local search strategy for global optimization and feature selection. Int. J. Mach. Learn. Cybern. 2021, 13, 309–336. [Google Scholar] [CrossRef]
- Hussien, A.G.; Heidari, A.A.; Ye, X.; Liang, G.; Chen, H.; Pan, Z. Boosting whale optimization with evolution strategy and gaussian random walks: An image segmentation method. Eng. Comput. 2022, 39, 1935–1979. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussien, A.G. Snake Optimizer: A novel meta-heuristic optimization algorithm. Knowl. Based Syst. 2022, 242, 108320. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: System parameters and control parameters of IMOSOA, . Initialization: Initialize populations by the tent chaotic mapping method, half of them are male and half are female. |
| Loop For: Step 1: Calculate the value of the three objective functions in (13) for each individual. Step 2: Generate the Pareto optimal solution of each population based on Pareto optimization, and store them into an external archive. Step 3: Select optimal individuals as the best solutions of the current generation from the external archive, based on the roulette wheel method presented in (24). Step 4: Perform evolutionary operations, and determine the current evolutionary stage based on the values of and . Step 5: Generate the next generation, and update the solution using (29)~(33) with the probability of Cauchy mutation . Step 6: Judge whether IMOSOA meets the termination conditions; if it is satisfied, the evolution is terminated, otherwise, repeat Step 1 to Step 5. Step 7: Generate the Pareto front based on Pareto optimization. Step 8: Select the optimal solution from Pareto front, using layered sort method based on the values of , with the scale factor . |
| Output: The optimal sub-array arrangement , and the corresponding value of , , . |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Radar carrier frequency | 0.6 GHz | Band width | 30 MHz |
| PRF | 1000 Hz | Look-down angle | 70° |
| Platform height | 7000 m | Sub-channel number | D = 6 |
| Subarray azimuth aperture | 0.25 m | Subarray pitch aperture | 0.25 m |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Channel amplitude error | 0.3 dB | Channel phase error | 3 Hz |
| Registration error | 0.1 m | Antenna directional error | 0.05° |
| Terrain elevation fluctuation RSME | 10 m | Clutter internal motion RSME | 0.02 m/s |
| Optimization Algorithms | Sub-Array 1 | Sub-Array 2 | Sub-Array 3 | Sub-Array 4 | Sub-Array 5 | Sub-Array 6 |
|---|---|---|---|---|---|---|
| NSGA-II | (5.9,−0.08,0) | (5.5,−0.07,0) | (0.4,−3.55,0) | (−2.1,−0.11,0.54) | (−3.4,−0.31,0.88) | (−3.9,−0.41,1.01) |
| MOABC | (5.9,−0.08,0) | (4.8,−0.05,0) | (2.9,−0.02,0) | (1.0,0,0) | (−2.3,−0.14,0.59) | (−3.2,−0.27,0.83) |
| MOSSA | (5.9,−0.08,0) | (5.5,−0.07,0) | (1.6,−0.01,0) | (−0.3,0,0.07) | (−1.6,−0.07,0.41) | (−3.7,−0.37,0.95) |
| MOALO | (5.9,−0.08,0) | (5.5,−0.07,0) | (3.1,−0.21,0) | (1.0,0,0) | (−0.1,0,0.03) | (−4.0,−0.43,1.04) |
| MOBOA | (5.9,−0.08,0) | (5.2,−0.06,0) | (1.9,−0.01,0) | (0.5,0,0) | (−1.3,0.04,0.34) | (−4.0,−0.43,1.04) |
| MOSO | (5.9,−0.08,0) | (4.6,−0.05,0) | (2.8,−0.02,0) | (0.3,0,0) | (−1.3,0.04,0.34) | (−4.0,−0.43,1.04) |
| IMOSOA | (5.9,−0.08,0) | (3.9,−0.03,0) | (1.9,−0.01,0) | (−0.3,0,0.08) | (−2.2,−0.12,0.57) | (−4.0,−0.43,1.04) |
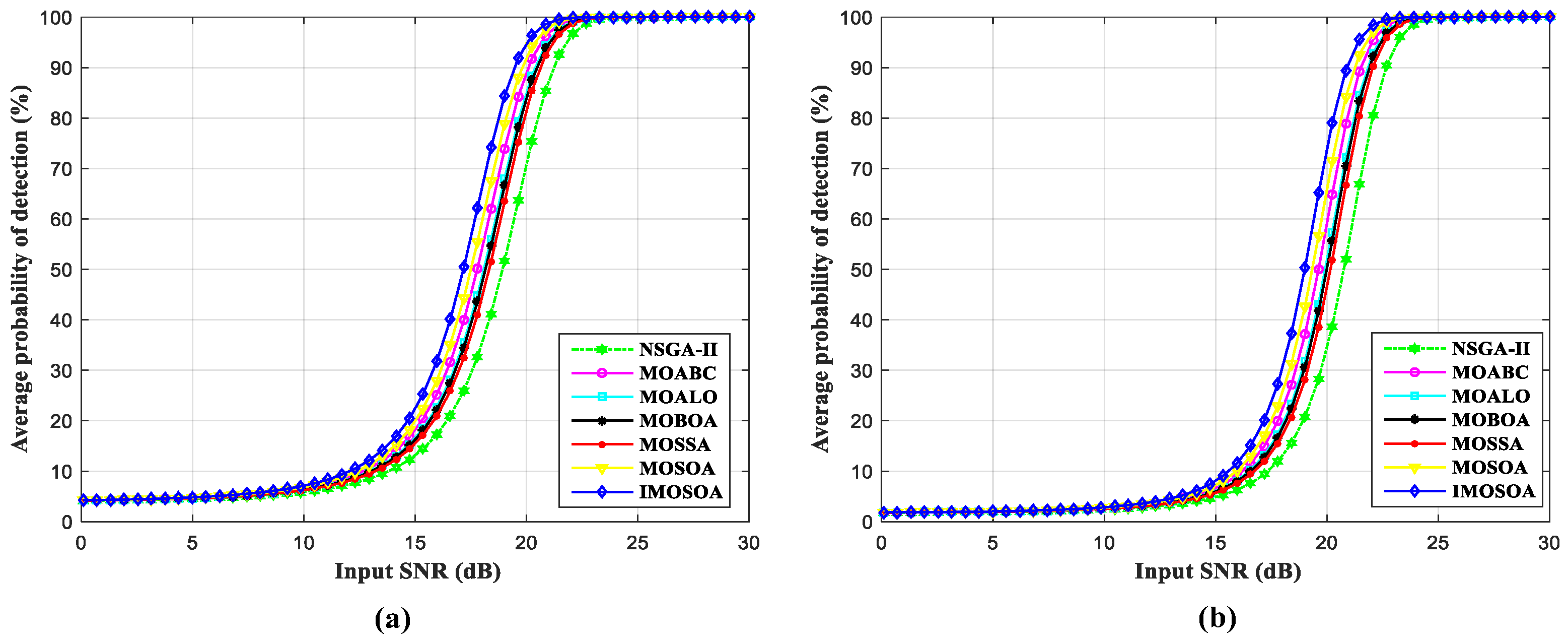
| Optimization Algorithms | The Value of Objective Functions | Moving Target Detection Probability (PD) | |||
|---|---|---|---|---|---|
| False Alarm 10−4 | False Alarm 10−6 | ||||
| NSGA-II | 0.095 | 1.256 | 9.598 | 70.8% | 34.6% |
| MOABC | 0.100 | 1.184 | 8.514 | 88.8% | 59.1% |
| MOSSA | 0.098 | 1.130 | 8.724 | 81.4% | 46.6% |
| MOALO | 0.096 | 1.042 | 8.814 | 84.9% | 51.8% |
| MOBOA | 0.096 | 1.065 | 8.936 | 83.9% | 50.2% |
| MOSOA | 0.097 | 1.015 | 8.225 | 91.8% | 65.8% |
| IMOSOA | 0.096 | 1.005 | 7.914 | 94.6% | 73.7% |
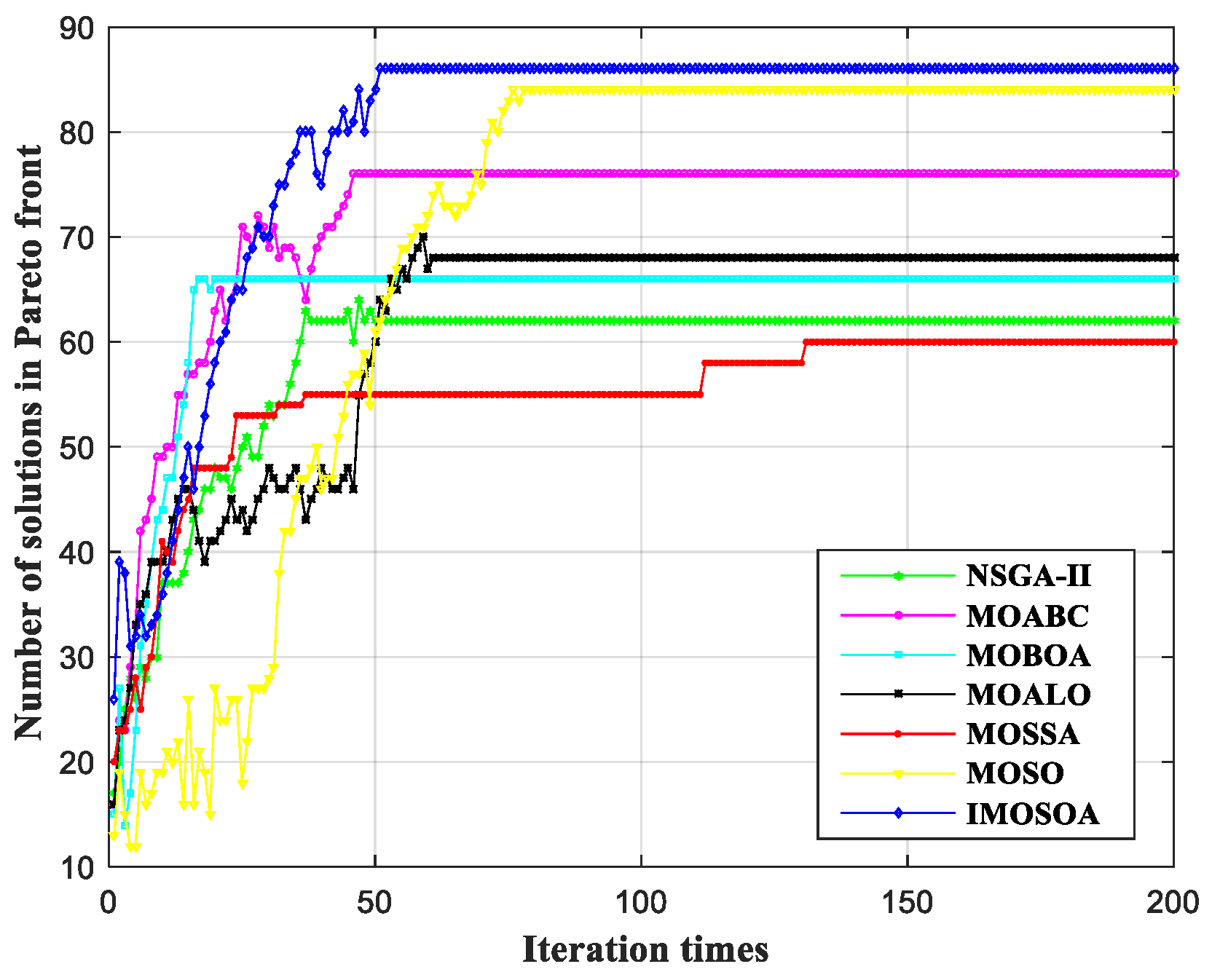
| Optimization Algorithms | Iteration Number | Solutions Number |
|---|---|---|
| NSGA-II | 51 | 62 |
| MOABC | 46 | 76 |
| MOSSA | 131 | 60 |
| MOALO | 61 | 68 |
| MOBOA | 20 | 66 |
| MOSO | 79 | 84 |
| IMOSOA | 51 | 86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wang, R.; Liang, G.; Yang, Z. A Multi-Objective Intelligent Optimization Method for Sensor Array Optimization in Distributed SAR-GMTI Radar Systems. Remote Sens. 2024, 16, 3041. https://doi.org/10.3390/rs16163041
Li X, Wang R, Liang G, Yang Z. A Multi-Objective Intelligent Optimization Method for Sensor Array Optimization in Distributed SAR-GMTI Radar Systems. Remote Sensing. 2024; 16(16):3041. https://doi.org/10.3390/rs16163041
Chicago/Turabian StyleLi, Xianghai, Rong Wang, Gengchen Liang, and Zhiwei Yang. 2024. "A Multi-Objective Intelligent Optimization Method for Sensor Array Optimization in Distributed SAR-GMTI Radar Systems" Remote Sensing 16, no. 16: 3041. https://doi.org/10.3390/rs16163041
APA StyleLi, X., Wang, R., Liang, G., & Yang, Z. (2024). A Multi-Objective Intelligent Optimization Method for Sensor Array Optimization in Distributed SAR-GMTI Radar Systems. Remote Sensing, 16(16), 3041. https://doi.org/10.3390/rs16163041