
Enhancing User Localization with an Integrated Sensing and Communication (ISAC) System: An Experimental UAV Search-and-Rescue Use Case





Abstract
1. Introduction
1.1. Related Works on ISAC-Empowered UAVs
1.2. Paper Contributions
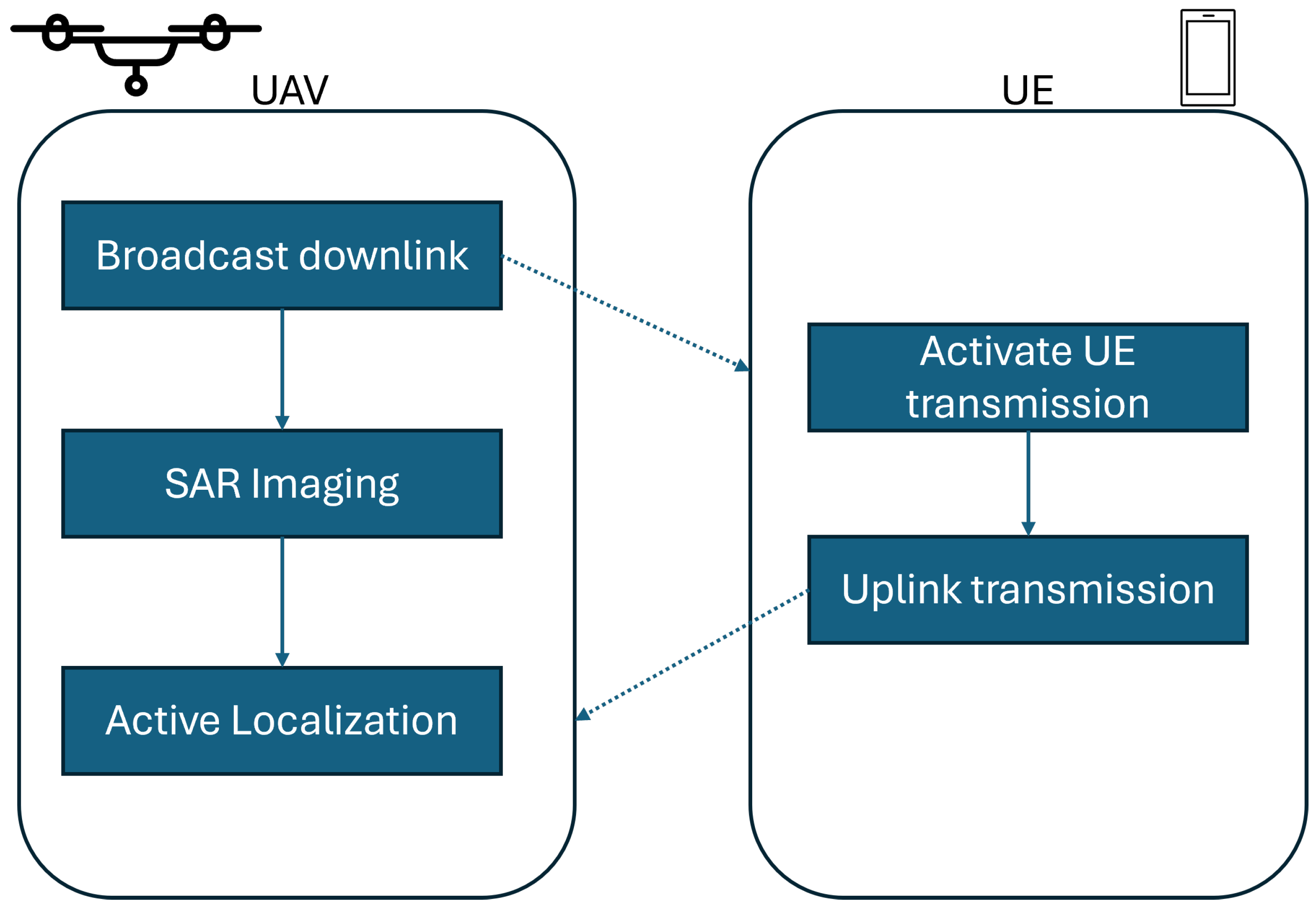
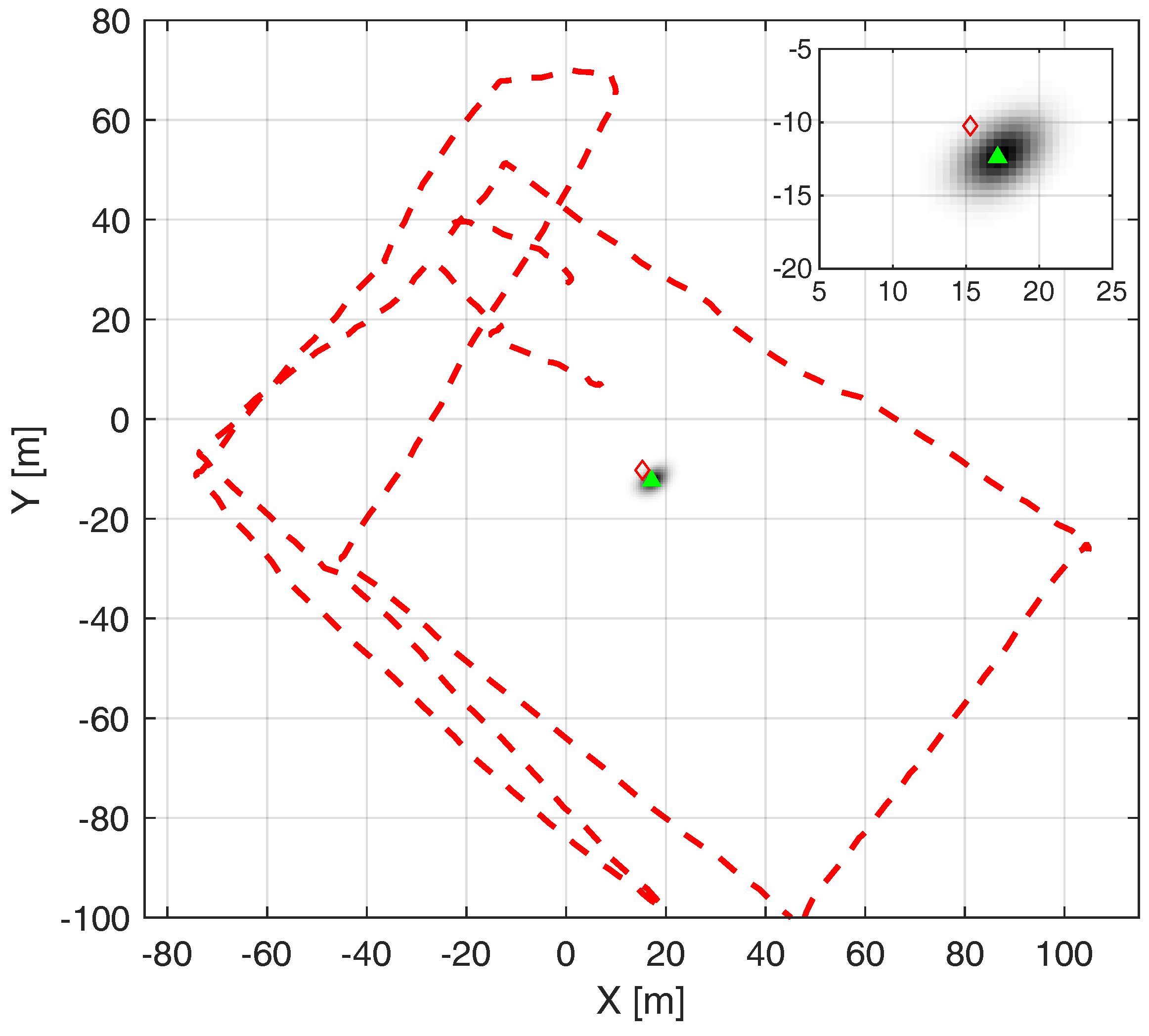
- We validate the system’s capability to generate high-quality SAR imagery while adhering to modern communication standards. Specifically, we propose a two-phase localization procedure that merges results from both passive, which exploits downlink ISAC signal, and active methods, which are based on the uplink signal sent by the users during the synchronization phase.
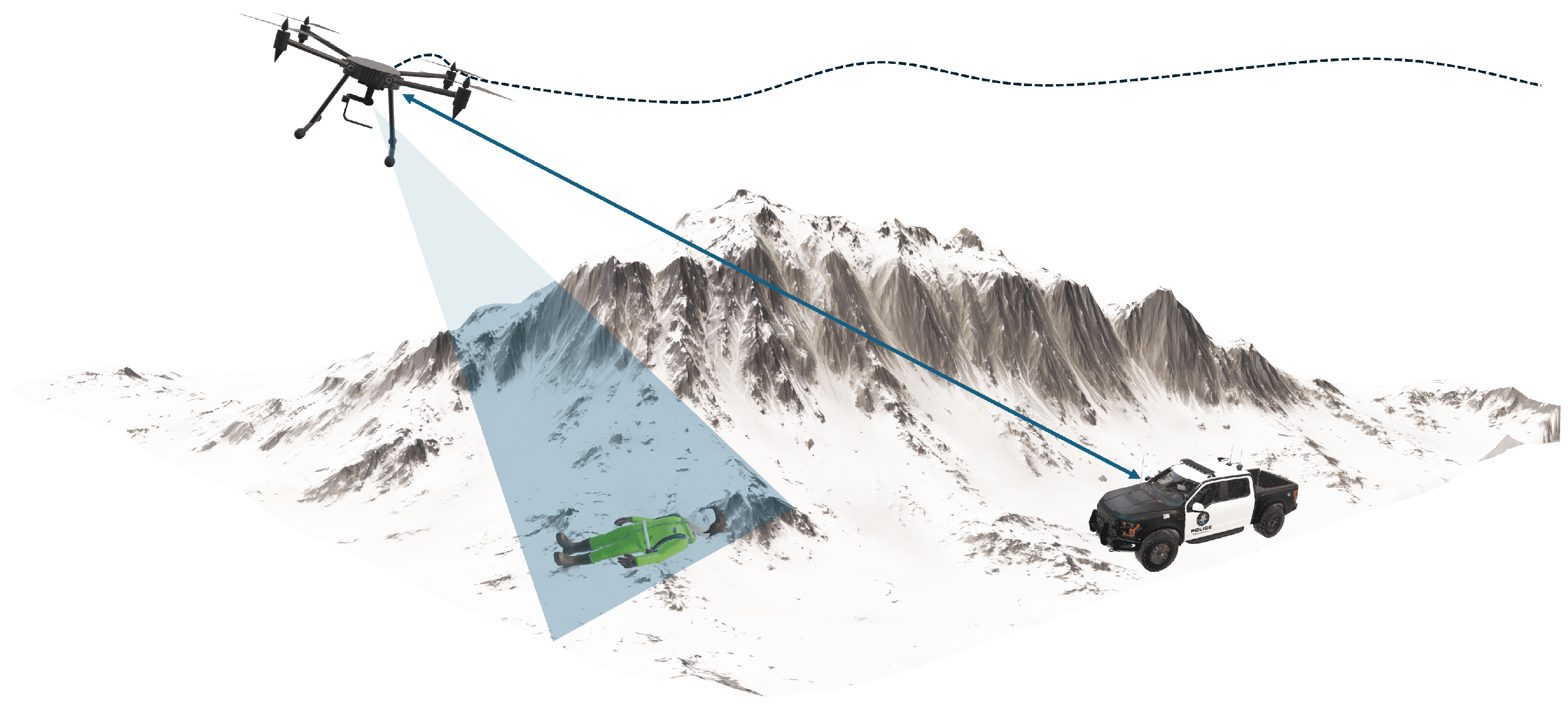
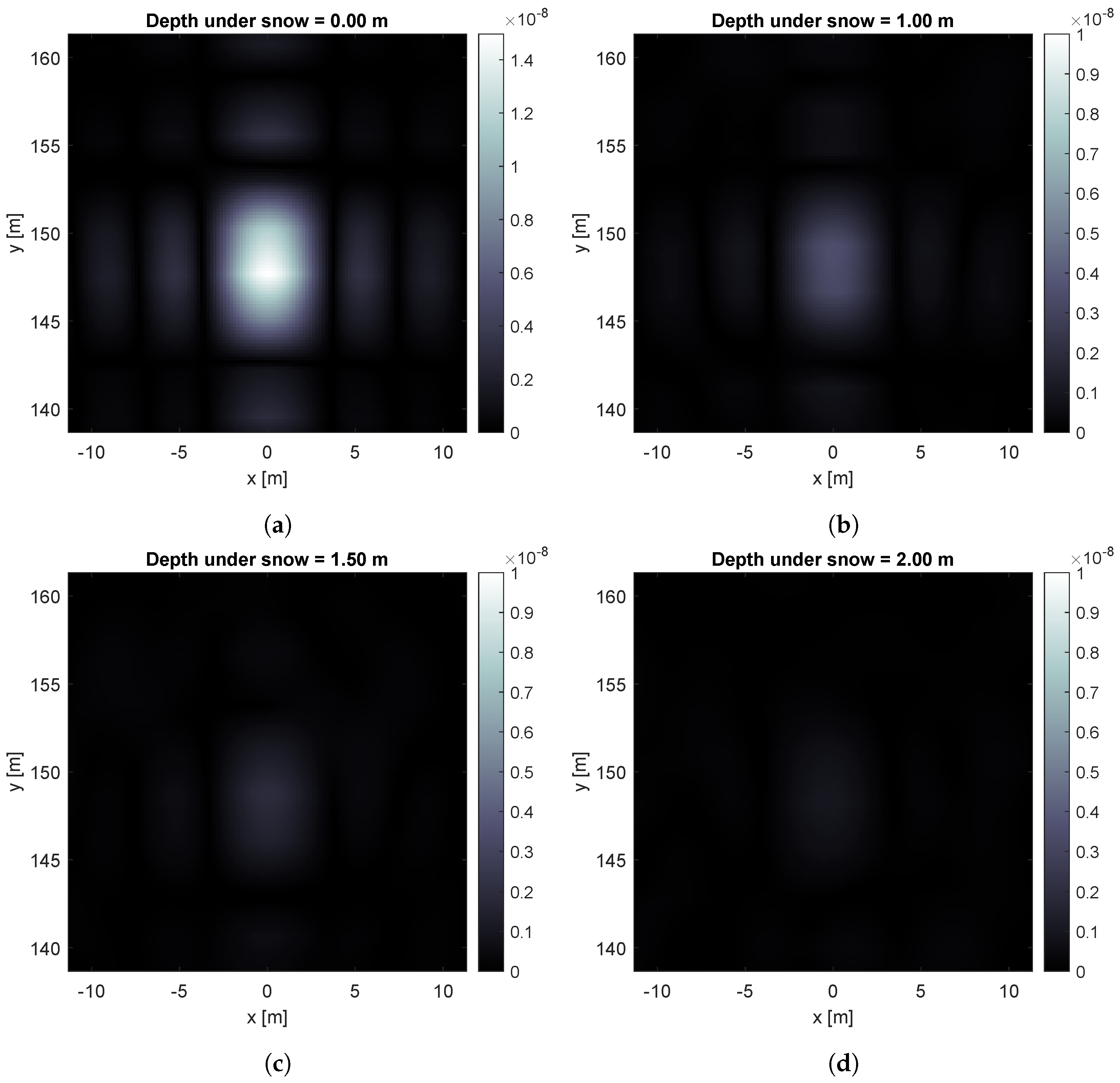
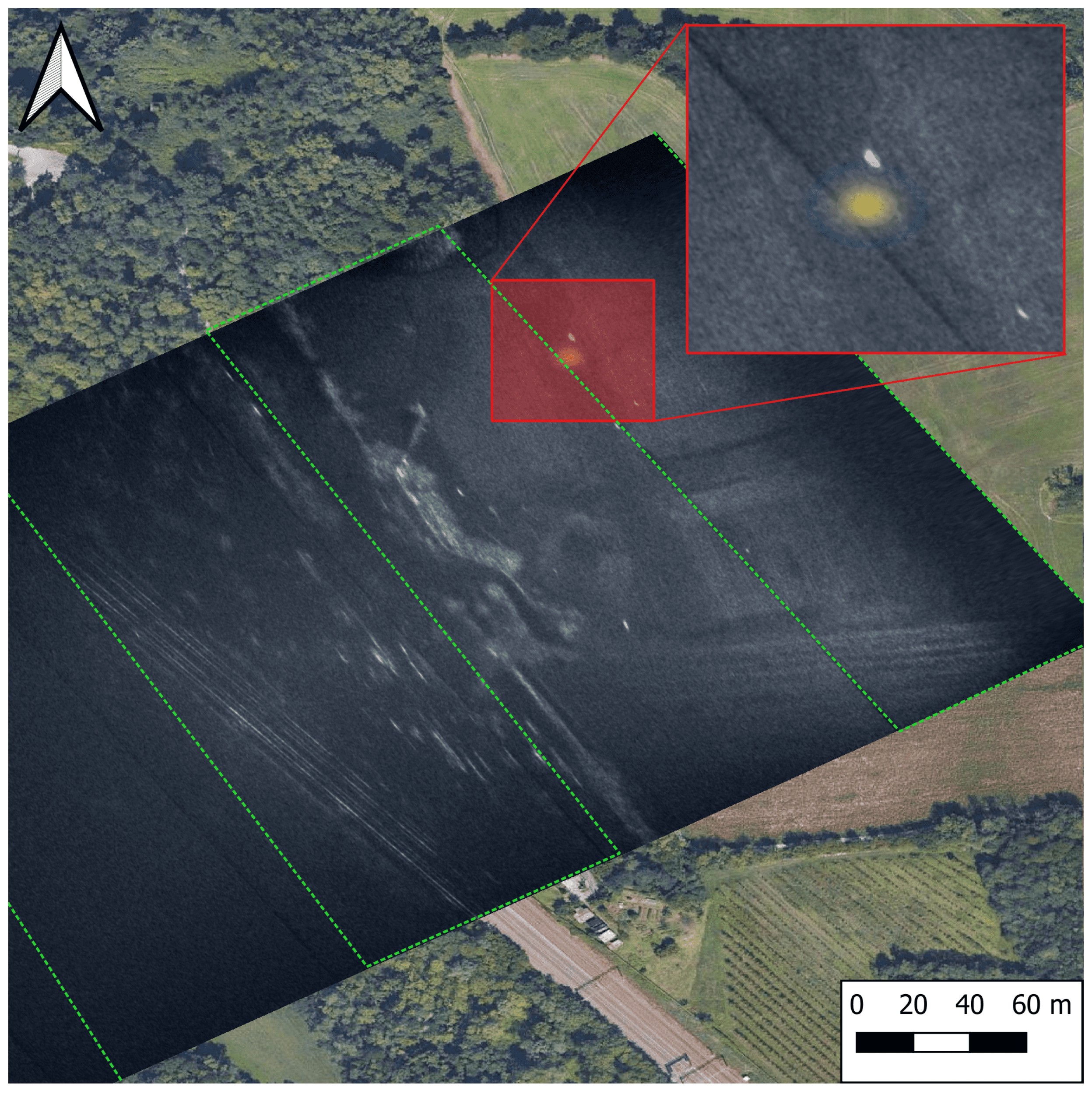
- We focus on introducing a practical approach to speed up search-and-rescue operations by localizing and imaging buried targets in challenging scenarios, such as persons under snow after an avalanche.
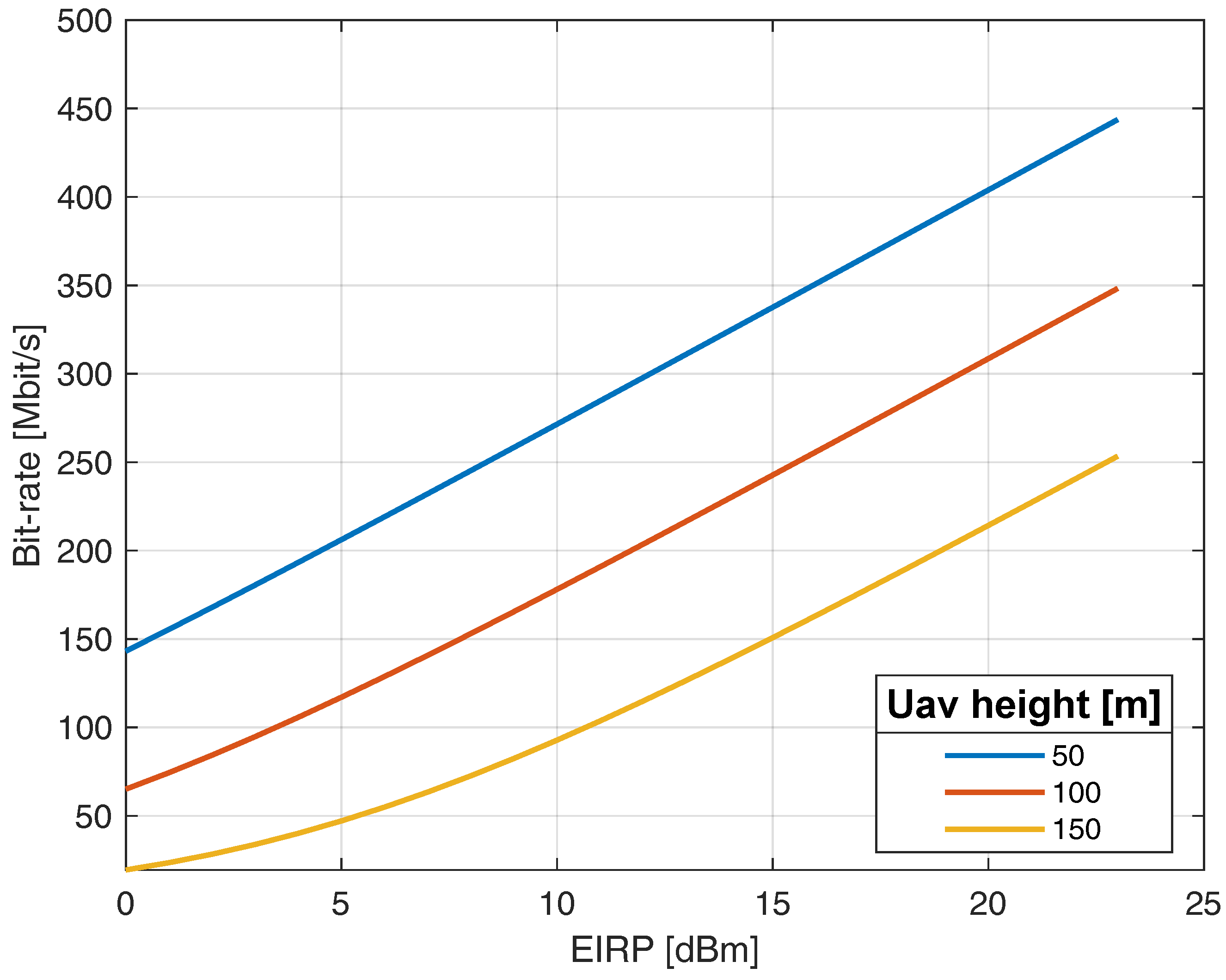
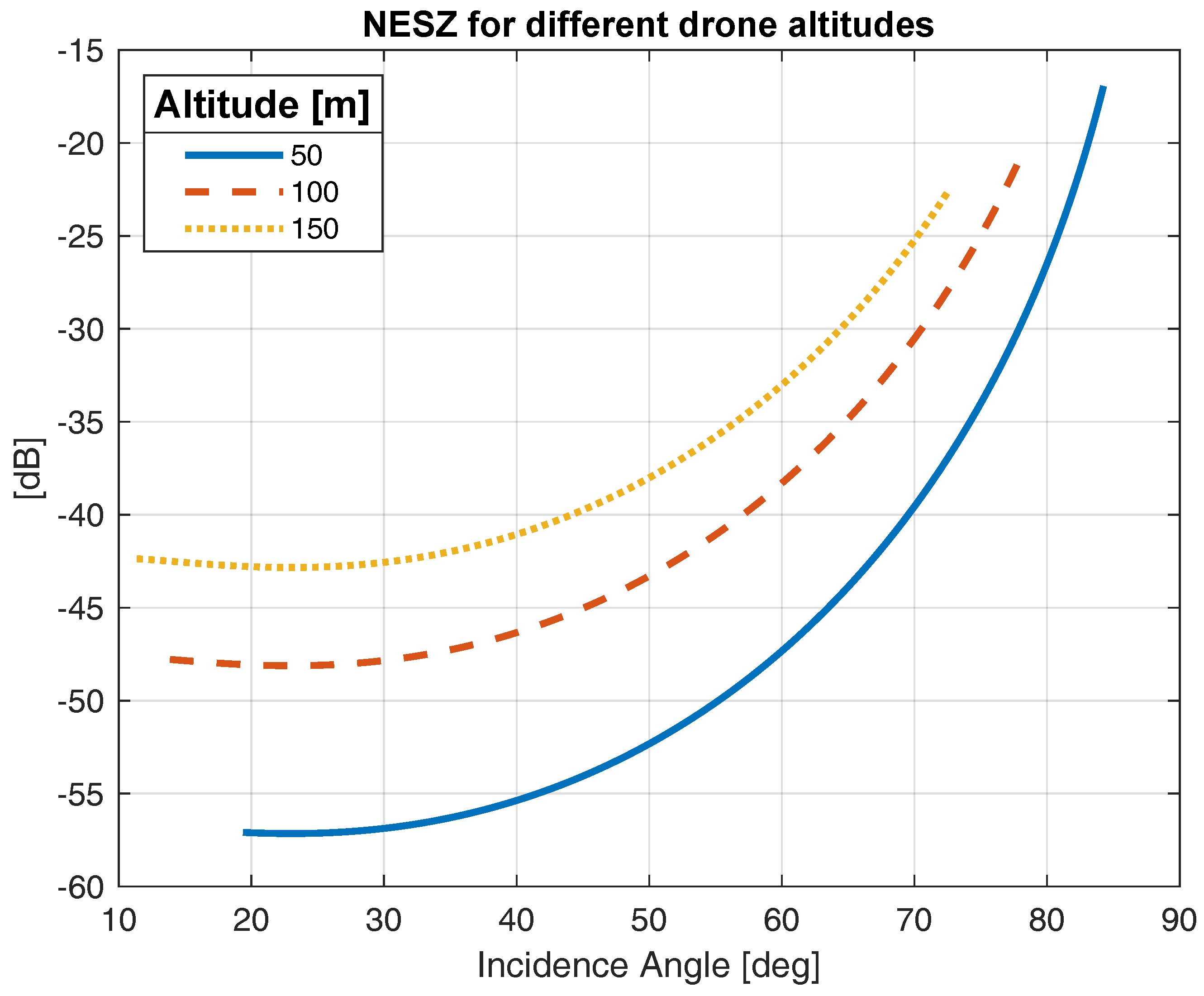
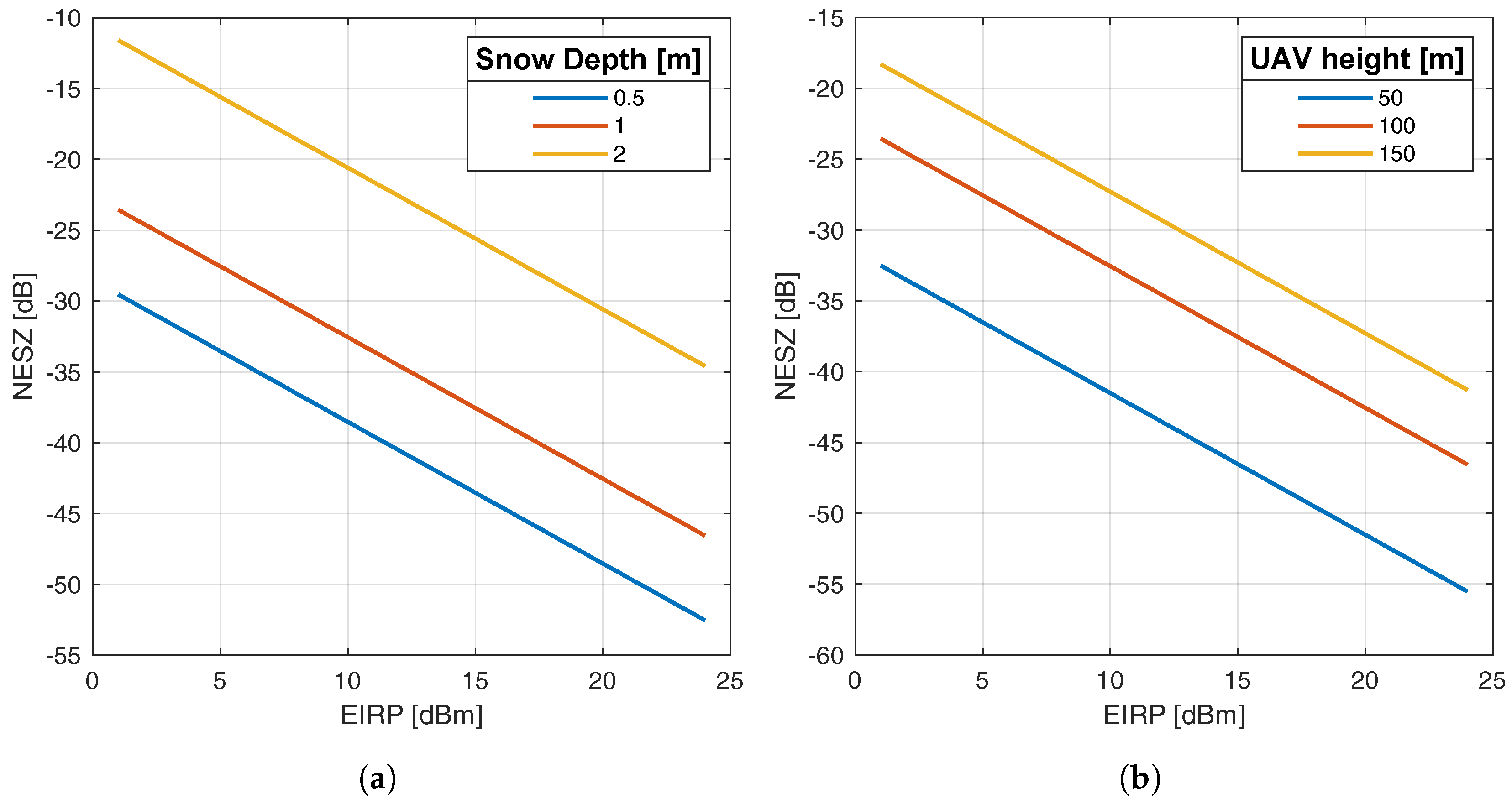
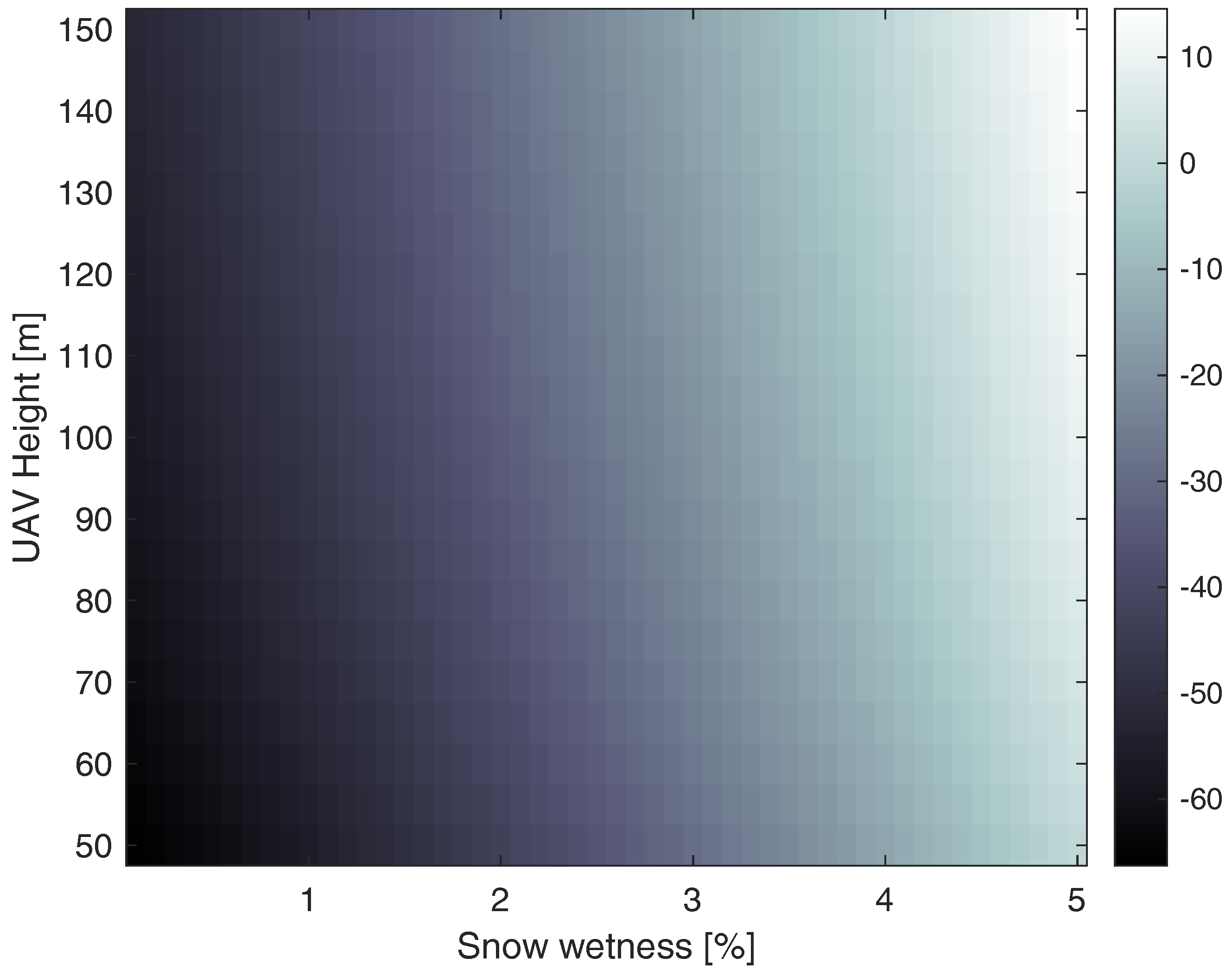
- We provide exhaustive numerical simulations that demonstrate the system communication and sensing performance in different conditions, such as UAV altitude and snow depth. Moreover, our exploration includes various signal processing techniques and an analysis of key performance metrics, such as Noise Equivalent Sigma Zero (NESZ) and channel capacity, using the QUAsi Deterministic RadIo channel GenerAtor (QuaDRiGa).
- We simulate the performance results of the Received Signal Strength Indicator (RSSI)-based localization of a ground RF transmitter. This applies to a scenario where a victim’s User Equipment (UE) is transmitting an uplink synchronization signal to start communicating with the aerial base station.
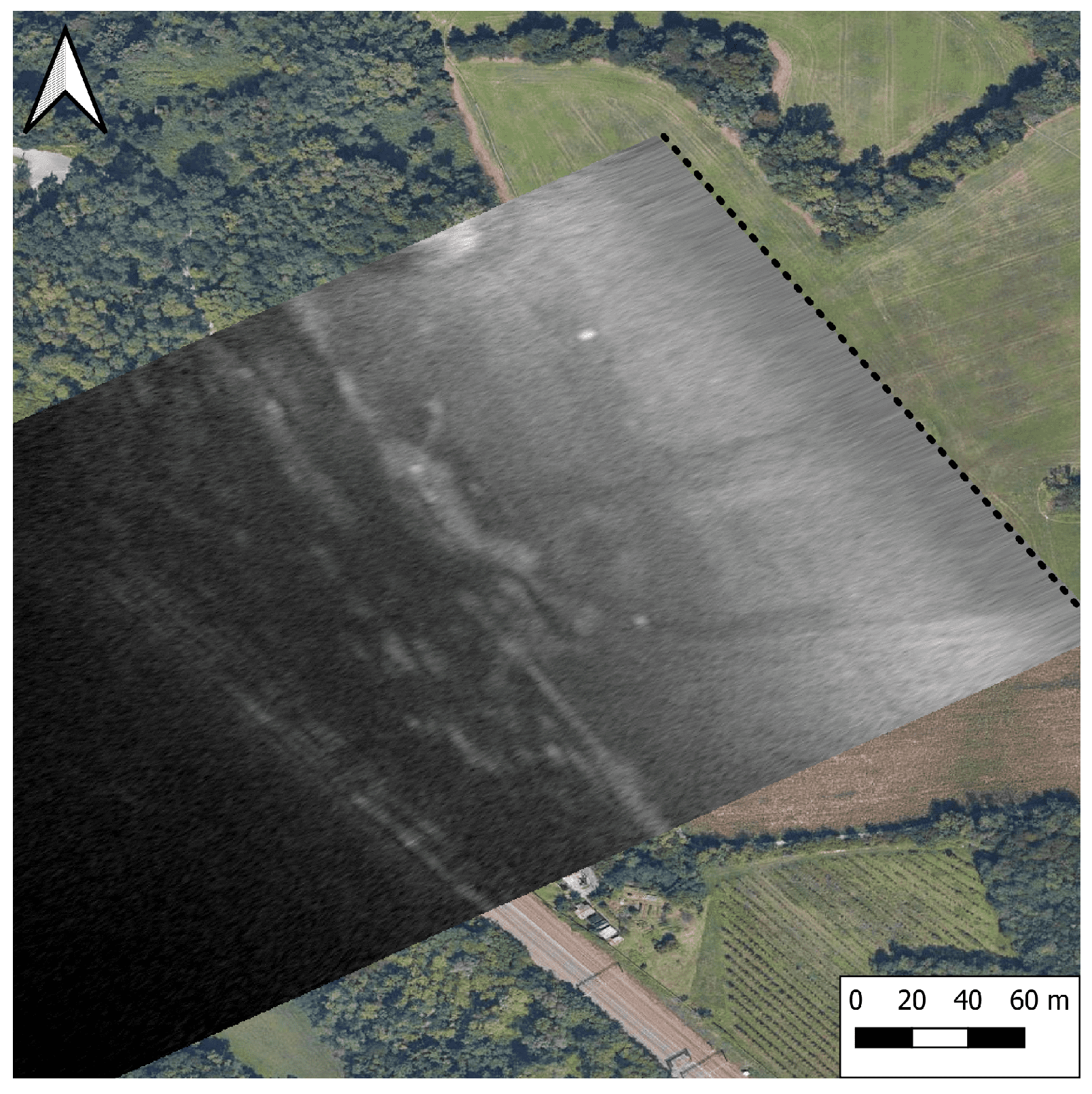
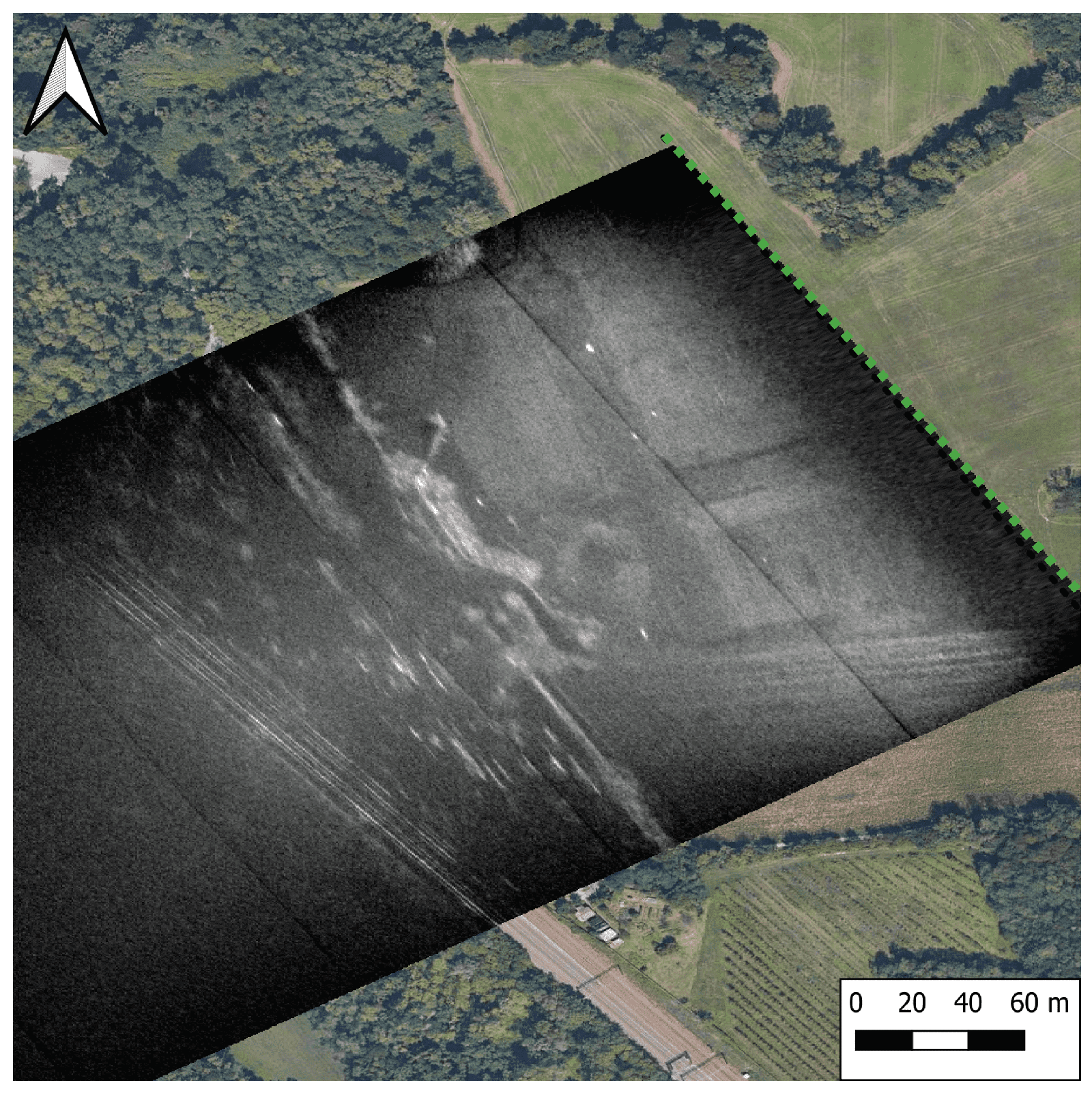
- We conduct an experimental campaign to validate our proposed setup, capturing SAR imagery using a UAV equipped with a Frequency Modulated Continuous Wave (FMCW) radar payload and low-cost Software Defined Radios (SDRs). These results are fused together with simulated RSSI-based localization results to improve target detection and classification.
2. UAV-Based Localization with ISAC System Model
3. Localization and Sensing
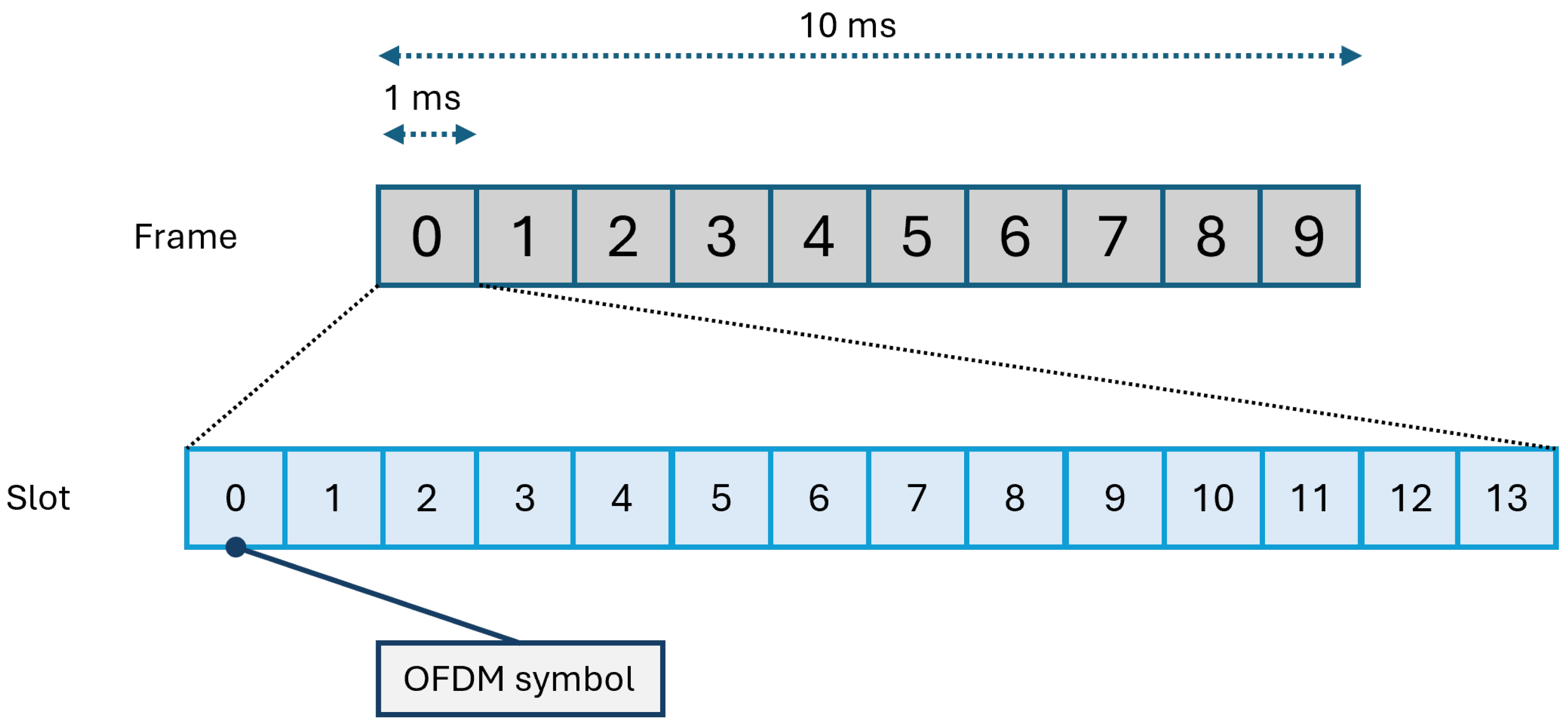
3.1. OFDM Signal and Parameters
3.2. Pulse Compression
3.3. SAR Image Formation
3.4. RSSI-Based Localization
4. Numerical Results
4.1. Passive Phase
4.2. Active Phase
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EIRP | Equivalent Isotropic Radiated Power |
| FMCW | Frequency Modulated Continuous Wave |
| IMSI | International Mobile Subscriber Identity |
| IRF | Impulse Response Function |
| ISAC | Integrated Sensing And Communication |
| ML | Maximum Likelihood |
| NESZ | Noise Equivalent Sigma Zero |
| OFDM | Orthogonal Frequency Division Multiplexing |
| PRF | Pulse Repetition Frequency |
| QuaDRiGa | QUAsi Deterministic RadIo channel GenerAtor |
| RCS | Radar Cross Section |
| RSSI | Received Signal Strength Indicator |
| SAR | Synthetic Aperture Radar |
| SDR | Software Defined Radio |
| SNR | Signal to Noise Ratio |
| UAV | Unmanned Aerial Vehicle |
| UE | User Equipment |
| ZF | Zero Forcing |
References
- Dong, F.; Liu, F.; Cui, Y.; Lu, S.; Li, Y. Sensing as a Service in 6G Perceptive Mobile Networks: Architecture, Advances, and the Road Ahead. IEEE Netw. 2024, 38, 87–96. [Google Scholar] [CrossRef]
- Demirhan, U.; Alkhateeb, A. Integrated sensing and communication for 6G: Ten key machine learning roles. IEEE Commun. Mag. 2023, 61, 113–119. [Google Scholar] [CrossRef]
- Blunt, S.D.; Cook, M.R.; Stiles, J. Embedding information into radar emissions via waveform implementation. In Proceedings of the 2010 International Waveform Diversity and Design Conference, Niagara Falls, ON, Canada, 8–13 August 2010; pp. 195–199. [Google Scholar]
- Huang, Y.; Hu, S.; Ma, S.; Liu, Z.; Xiao, M. Designing low-PAPR waveform for OFDM-based RadCom systems. IEEE Trans. Wirel. Commun. 2022, 21, 6979–6993. [Google Scholar] [CrossRef]
- Pucci, L.; Paolini, E.; Giorgetti, A. System-Level Analysis of Joint Sensing and Communication based on 5G New Radio. IEEE J. Sel. Areas Commun. 2022, 40, 2043–2055. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, G.; Chen, Y.; Xu, J.; Yin, Y. Super-Resolution Range and Velocity Estimations With OFDM Integrated Radar and Communications Waveform. IEEE Trans. Veh. Technol. 2020, 69, 11659–11672. [Google Scholar] [CrossRef]
- Shi, C.; Wang, F.; Sellathurai, M.; Zhou, J.; Salous, S. Power Minimization-Based Robust OFDM Radar Waveform Design for Radar and Communication Systems in Coexistence. IEEE Trans. Signal Process. 2018, 66, 1316–1330. [Google Scholar] [CrossRef]
- Zhang, Y.; Aditya, S.; Clerckx, B. Input Distribution Optimization in OFDM Dual-Function Radar-Communication Systems. arXiv 2023, arXiv:2305.06635. [Google Scholar] [CrossRef]
- Keskin, M.F.; Koivunen, V.; Wymeersch, H. Limited Feedforward Waveform Design for OFDM Dual-Functional Radar-Communications. IEEE Trans. Signal Process. 2021, 69, 2955–2970. [Google Scholar] [CrossRef]
- Bekkali, N.; Benammar, M.; Bidon, S.; Roque, D. Optimal Power Allocation in Monostatic OFDM Joint Radar Communications Systems. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York City, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, G.; Xu, J.; Yang, Z.; Zhang, Y. Adaptive OFDM Integrated Radar and Communications Waveform Design Based on Information Theory. IEEE Commun. Lett. 2017, 21, 2174–2177. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, Z.; Yu, W. Information theoretic waveform design for OFDM radar-communication coexistence in Gaussian mixture interference. IET Radar Sonar Navig. 2019, 13, 2063–2070. [Google Scholar] [CrossRef]
- Baquero Barneto, C.; Riihonen, T.; Turunen, M.; Anttila, L.; Fleischer, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Full-Duplex OFDM Radar With LTE and 5G NR Waveforms: Challenges, Solutions, and Measurements. IEEE Trans. Microw. Theory Tech. 2019, 67, 4042–4054. [Google Scholar] [CrossRef]
- Barneto, C.B.; Liyanaarachchi, S.D.; Riihonen, T.; Heino, M.; Anttila, L.; Valkama, M. Beamforming and Waveform Optimization for OFDM-based Joint Communications and Sensing at mm-Waves. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 1–5 November 2020; pp. 895–899. [Google Scholar] [CrossRef]
- Liu, F.; Zhou, L.; Masouros, C.; Li, A.; Luo, W.; Petropulu, A. Toward dual-functional radar-communication systems: Optimal waveform design. IEEE Trans. Signal Process. 2018, 66, 4264–4279. [Google Scholar] [CrossRef]
- Manzoni, M.; Linsalata, F.; Magarini, M.; Tebaldini, S. Integrated Communication and Imaging: Design, Analysis, and Performances of COSMIC Waveforms. arXiv 2024, arXiv:2405.19481. [Google Scholar] [CrossRef]
- Meng, K.; Wu, Q.; Xu, J.; Chen, W.; Feng, Z.; Schober, R.; Swindlehurst, A.L. UAV-Enabled Integrated Sensing and Communication: Opportunities and Challenges. IEEE Wirel. Commun. 2024, 31, 97–104. [Google Scholar] [CrossRef]
- Petritoli, E.; Leccese, F.; Ciani, L. Reliability assessment of UAV systems. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 266–270. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, G. A survey on UAV-assisted wireless communications: Recent advances and future trends. Comput. Commun. 2023, 208, 44–78. [Google Scholar] [CrossRef]
- Trotta, A.; Di Felice, M.; Chowdhury, K.R.; Bononi, L. Fly and recharge: Achieving persistent coverage using small unmanned aerial vehicles (SUAVs). In Proceedings of the 2017 IEEE ICC, Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Cui, Y.; Liu, F.; Jing, X.; Mu, J. Integrating sensing and communications for ubiquitous IoT: Applications, trends, and challenges. IEEE Netw. 2021, 35, 158–167. [Google Scholar] [CrossRef]
- Grathwohl, A.; Stelzig, M.; Kanz, J.; Fenske, P.; Benedikter, A.; Knill, C.; Ullmann, I.; Hajnsek, I.; Moreira, A.; Krieger, G.; et al. Taking a look beneath the surface: Multicopter UAV-based ground-penetrating imaging radars. IEEE Microw. Mag. 2022, 23, 32–46. [Google Scholar] [CrossRef]
- RECCO Company. Available online: https://www.recco.com (accessed on 16 April 2024).
- Grasegger, K.; Strapazzon, G.; Procter, E.; Brugger, H.; Soteras, I. Avalanche Survival After Rescue With the RECCO Rescue System: A Case Report. Wilderness Environ. Med. 2016, 27, 282–286. [Google Scholar] [CrossRef]
- Hohlrieder, M.; Mair, P.; Wuertl, W.; Brugger, H. The Impact of Avalanche Transceivers on Mortality from Avalanche Accidents. High Alt. Med. Biol. 2005, 6, 72–77. [Google Scholar] [CrossRef] [PubMed]
- Linsalata, F.; Albanese, A.; Sciancalepore, V.; Roveda, F.; Magarini, M.; Costa-Perez, X. OTFS-superimposed PRACH-aided Localization for UAV Safety Applications. In Proceedings of the 2021 IEEE GLOBECOM, Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Albanese, A.; Sciancalepore, V.; Costa-Pérez, X. SARDO: An Automated Search-and-Rescue Drone-Based Solution for Victims Localization. IEEE Trans. Mob. Comput. 2022, 21, 3312–3325. [Google Scholar] [CrossRef]
- Song, M.; Huo, Y.; Liang, Z.; Dong, X.; Lu, T. UAV Communication Recovery under Meteorological Conditions. Drones 2023, 7, 423. [Google Scholar] [CrossRef]
- Jing, X.; Liu, F.; Masouros, C.; Zeng, Y. ISAC from the Sky: UAV Trajectory Design for Joint Communication and Target Localization. IEEE Trans. Wirel. Commun. 2024. [Google Scholar] [CrossRef]
- Tan, D.K.P.; He, J.; Li, Y.; Bayesteh, A.; Chen, Y.; Zhu, P.; Tong, W. Integrated sensing and communication in 6G: Motivations, use cases, requirements, challenges and future directions. In Proceedings of the 2021 1st IEEE International Online Symposium on Joint Communications & Sensing (JC&S), Dresden, Germany, 23–24 February 2021; pp. 1–6. [Google Scholar]
- Moro, S.; Linsalata, F.; Manzoni, M.; Magarini, M.; Tebaldini, S. Exploring ISAC Technology for UAV SAR Imaging. arXiv 2024, arXiv:2401.10606. [Google Scholar] [CrossRef]
- Moro, S.; Teeda, V.; Scazzoli, D.; Reggiani, L.; Magarini, M. Experimental UAV-Aided RSSI Localization of a Ground RF Emitter in 865 MHz and 2.4 GHz Bands. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Scazzoli, D.; Moro, S.; Teeda, V.; Upadhyay, P.K.; Magarini, M. Experimental Comparison of UAV-Based RSSI and AoA Localization. IEEE Sens. Lett. 2024, 8, 6000104. [Google Scholar] [CrossRef]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Şahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- 3GPP. NR; Physical channels and modulation (Release 15). Technical Specification (TS) 38.211, 3rd Generation Partnership Project (3GPP). 2020. Version 15.8.0. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3213 (accessed on 13 June 2024).
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A survey of autonomous vehicles: Enabling communication technologies and challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez, J.T.; Colone, F.; Lombardo, P. Supervised Reciprocal Filter for OFDM Radar Signal Processing. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 3871–3889. [Google Scholar] [CrossRef]
- Rodriguez, J.T.; Colone, F.; Lombardo, P. Experimental evaluation of Supervised Reciprocal Filter Strategies for OFDM-radar signal processing. In Proceedings of the 2023 IEEE RadarConf23, San Antonio, TX, USA, 1–5 May 2023; pp. 1–6. [Google Scholar]
- Ulander, L.M.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Shue, S.; Johnson, L.E.; Conrad, J.M. Utilization of XBee ZigBee modules and MATLAB for RSSI localization applications. In Proceedings of the SoutheastCon 2017, Charlotte, NC, USA, 30 March–2 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Jaeckel, S.; Raschkowski, L.; Börner, K.; Thiele, L. QuaDRiGa: A 3-D multi-cell channel model with time evolution for enabling virtual field trials. IEEE Trans. Antennas Propag. 2014, 62, 3242–3256. [Google Scholar] [CrossRef]
- Pang, L.; Zhang, J.; Zhang, Y.; Huang, X.; Chen, Y.; Li, J. Investigation and comparison of 5G channel models: From QuaDRiGa, NYUSIM, and MG5G perspectives. Chin. J. Electron. 2022, 31, 1–17. [Google Scholar]
- 3GPP TS 38.211. NR. Physical Channels and Modulation. 2018. Available online: https://www.3gpp.org/dynareport?code=38-series.htm (accessed on 13 June 2024).
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Tiuri, M.; Sihvola, A.; Nyfors, E.; Hallikaiken, M. The complex dielectric constant of snow at microwave frequencies. IEEE J. Ocean. Eng. 1984, 9, 377–382. [Google Scholar] [CrossRef]
- Shi, J.; Dozier, J. Inferring snow wetness using C-band data from SIR-C’s polarimetric synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1995, 33, 905–914. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCS [KHz] | N Slot per Frame | Slot Duration [s] | Usage | 3GPP Release | |
|---|---|---|---|---|---|
| 0 | 15 | 10 | 1000 | Data, Sync | Rel. 15 |
| 1 | 30 | 20 | 500 | Data, Sync | Rel. 15 |
| 2 | 60 | 40 | 250 | Data | Rel. 15 |
| 3 | 120 | 80 | 125 | Data, Sync | Rel. 15 |
| 4 | 240 | 160 | 62.5 | Sync | Rel. 15 |
| 5 | 480 | 320 | 31.25 | Data, Sync | Rel. 17 |
| 6 | 960 | 640 | 15.625 | Data, Sync | Rel. 17 |
| Parameter | Value |
|---|---|
| 5.9 GHz | |
| Maximum bandwidth B | 40 MHz |
| Numerology | 3 |
| Sub-carrier spacing | 120 KHz |
| Data symbol duration T | 8.33 s |
| Noise Figure | 7 dB |
| EIRP | 23 dBm |
| 10 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moro, S.; Linsalata, F.; Manzoni, M.; Magarini, M.; Tebaldini, S. Enhancing User Localization with an Integrated Sensing and Communication (ISAC) System: An Experimental UAV Search-and-Rescue Use Case. Remote Sens. 2024, 16, 3031. https://doi.org/10.3390/rs16163031
Moro S, Linsalata F, Manzoni M, Magarini M, Tebaldini S. Enhancing User Localization with an Integrated Sensing and Communication (ISAC) System: An Experimental UAV Search-and-Rescue Use Case. Remote Sensing. 2024; 16(16):3031. https://doi.org/10.3390/rs16163031
Chicago/Turabian StyleMoro, Stefano, Francesco Linsalata, Marco Manzoni, Maurizio Magarini, and Stefano Tebaldini. 2024. "Enhancing User Localization with an Integrated Sensing and Communication (ISAC) System: An Experimental UAV Search-and-Rescue Use Case" Remote Sensing 16, no. 16: 3031. https://doi.org/10.3390/rs16163031
APA StyleMoro, S., Linsalata, F., Manzoni, M., Magarini, M., & Tebaldini, S. (2024). Enhancing User Localization with an Integrated Sensing and Communication (ISAC) System: An Experimental UAV Search-and-Rescue Use Case. Remote Sensing, 16(16), 3031. https://doi.org/10.3390/rs16163031