


A Feature Line Extraction Method for Building Roof Point Clouds Considering the Grid Center of Gravity Distribution

Abstract

1. Introduction
- The proposed algorithm directly leveraged the 3D angle between the center of gravity of the grid and the center of gravity of its eight-neighborhood grids to determine the linear distribution characteristics of the points, thus avoiding the influence of errors in roof surface segmentation results and the topological relationship among adjacent surfaces of the extraction results of the feature line.
- Compared with existing methods for extracting building roof feature lines that combine different extraction strategies, the method in this paper realized the integration of the extraction of outer and inner feature lines, which is simple in principle.
- The proposed algorithm was applied to roof feature line extraction in multi-building regions, without the need for the monomeric segmentation of region–building point cloud data. It significantly simplified the roof feature line extraction steps of the existing methods.
2. Methods
2.1. Extraction of Feature Points
2.1.1. Establishment of Virtual Grids
2.1.2. Center of Gravity Points Calculation
2.1.3. Initial Feature Point Extraction
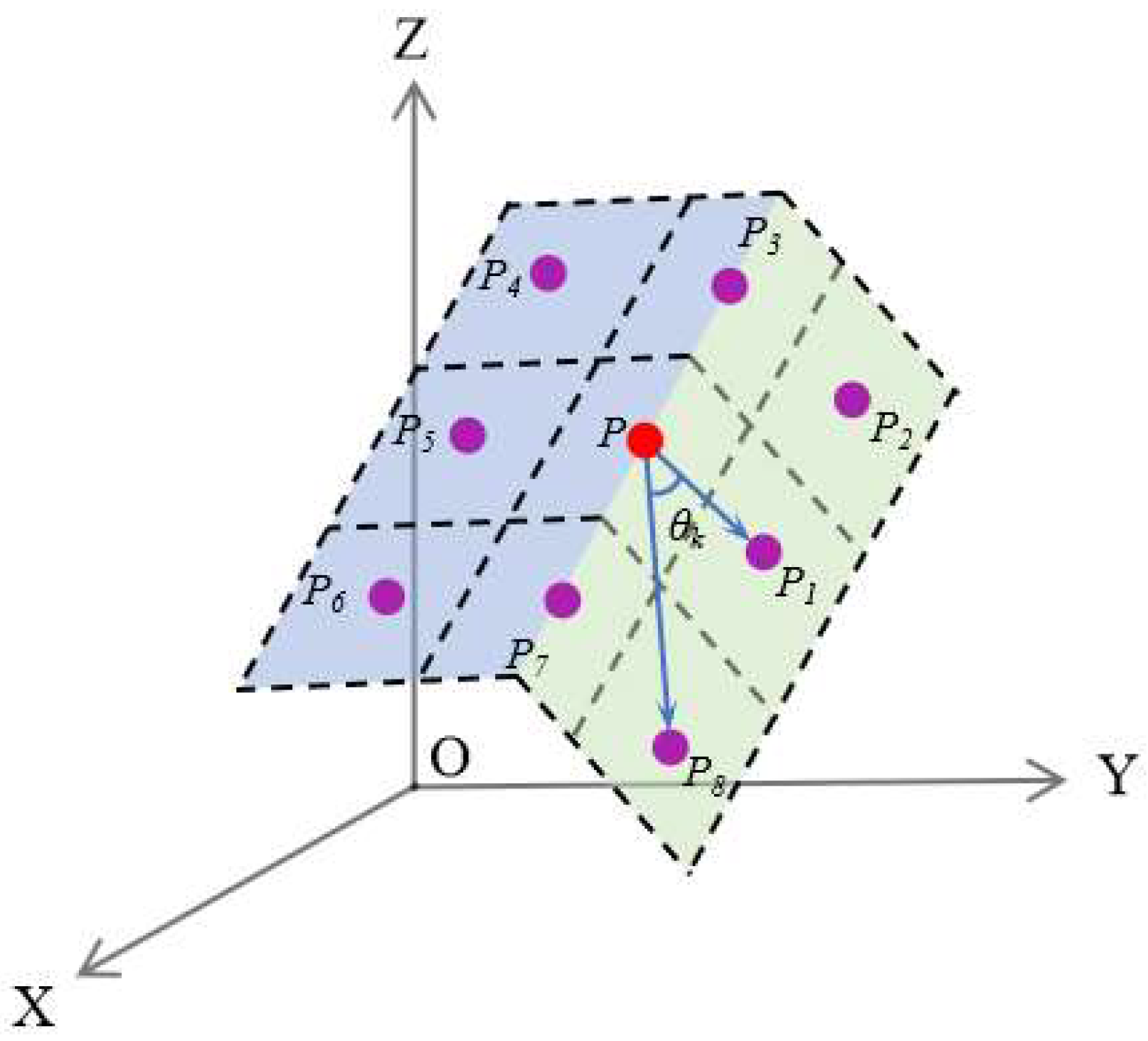
- As shown in Figure 4, any non-empty grid was chosen as the current grid and its center of gravity was recorded as P. The center of gravity set of non-empty grids in the eight-neighborhood was , where m is the number of non-empty grids in the eight-neighborhood. It is worth noting that when , it means that there is only one non-empty grid in the eight-neighborhood of the current grid, and the three-dimensional angle cannot be formed. Only when can the centers of gravity and of any two non-empty grids be chosen randomly in the eight-neighborhoods of the current grid, where i, j belong to and . According to Equation (3), the three-dimensional angle was calculated.
- Under the above conditions, the three-dimensional angle set formed by the center of gravity in the current grid and any two centers of gravity in the eight-neighborhood was , where . This was the total number of formed angles. According to Equation (4), the number of three-dimensional angles in the set that were larger than the angle threshold was . If , the center of gravity in the current grid is the feature point. In this study, it was set .
- Based on the above principle, all non-empty grids were traversed successively, and all qualified centers of gravity were added to the initial feature point set.
2.1.4. Initial Feature Point Optimization
2.2. Extraction of Feature Lines
2.3. Determination of the Endpoints of the Feature Line
2.3.1. Determination of the Initial Endpoints of the Feature Line
2.3.2. Optimization of the Initial Endpoints
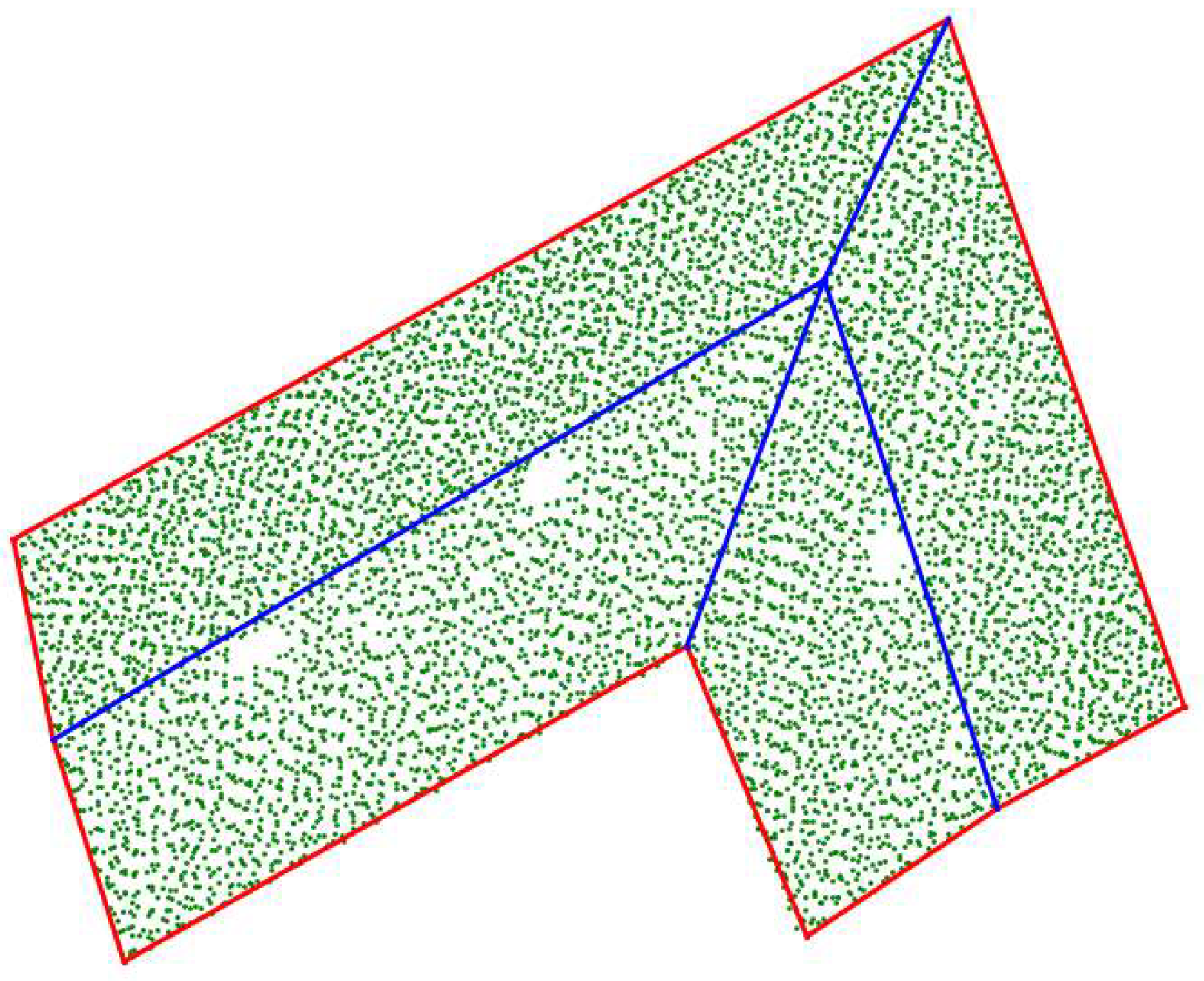
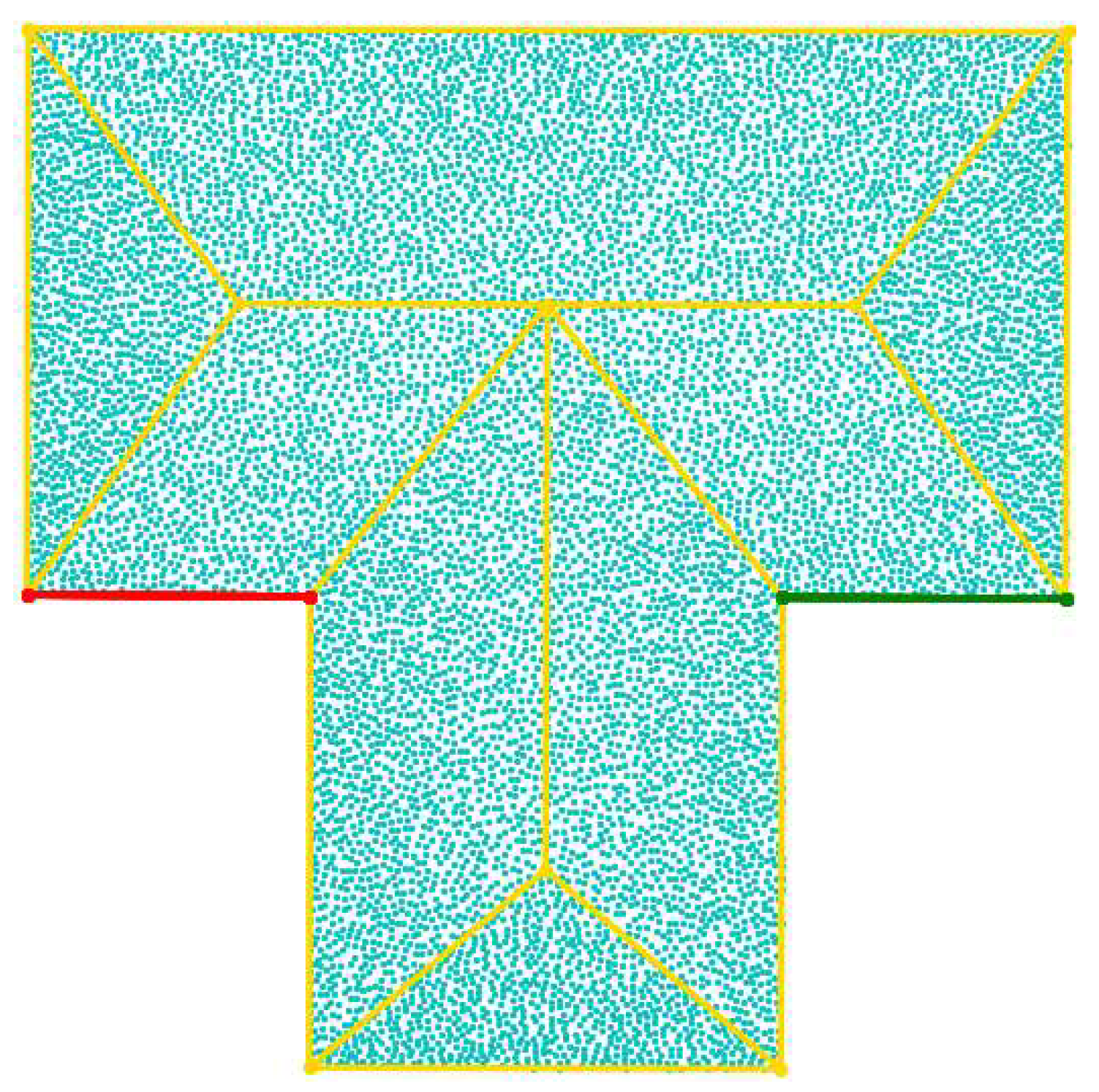
- Classification of feature lines. A feature line was considered to be an outer feature line if there were empty grids in the eight-neighborhood of the grids where the two endpoints of the feature line were located, as shown by the blue line in Figure 9; otherwise, the feature line was considered to be an inner feature line, as shown by the red line in Figure 9.
- Optimization of outer feature lines. As shown in Figure 10, for any outer feature line , with initial endpoints and , a circular region with radius L was constructed on the horizontal plane with one of its side endpoints as the center of the circle, and the circular region was equally divided into two semicircles along the direction of the feature line. The number of original points with x and y coordinates located in the two semicircles was counted, and the side with fewer points was considered to be the outer side of the feature line. The distances from all original points located in the outer semicircle to the line where the feature line was located were calculated, and the farthest distance among them was determined to be . Similarly, the farthest distance from the original points in the outer semicircle constructed with the other endpoint of the feature line to the feature line was obtained as . Calculating the translation distance , the feature line was translated vertically outward by the distance in the horizontal plane, and the translated feature line and its endpoints and were obtained.
- Optimization of the corresponding endpoints. We calculated the distance between the endpoints of different feature lines. The initial endpoints with a distance between each other of less than 3L were recorded as a group of corresponding endpoints and were optimized, and the coordinates of the optimized endpoints were marked as (X, Y, Z). If the number of endpoints in the group N = 2, the coordinates of the intersection of the two feature lines where the two endpoints were located were taken as the X and Y coordinates of the optimized endpoints, and the elevation of the original point nearest to the intersection was used as the Z coordinate, thus completing the optimization of the corresponding endpoints in the group. If N > 2, the intersection points were calculated for any two feature lines with a large difference in slope, and the means of the coordinates of all the intersection points were calculated as the X and Y coordinates of the optimized endpoints. The elevation of the original point nearest to the mean point was used as the Z coordinate, thus completing the optimization of the corresponding endpoints in this group.
3. Experimental Results and Analysis
3.1. Experimental Data
3.2. Analysis of Experimental Parameters
3.3. Evaluation Measures
- Distance similarity (ds, dis = 0.2 m):
- 2.
- Direction similarity (os, α0 = 5°):
- 3.
- Projection similarity (ps):
3.4. Results
3.4.1. Feature Line Extraction Results of Different Algorithms
3.4.2. Quantitative Analysis of the Feature Line Extraction Results
4. Discussion
5. Conclusions
- (i)
- Enhanced robustness: The algorithm analyzed the linear distribution characteristics of local neighborhood points based on the center of gravity of the grid, rather than the original points. This approach enhanced the robustness of point clouds of varying densities and mitigated the impact of noise points on the extraction results.
- (ii)
- Direct extraction of 3D features: The algorithm directly extracted 3D feature points and feature lines in the object space. This improved the effectiveness and reliability of feature line extraction by effectively leveraging the local structural features and 3D information of the point clouds.
- (iii)
- Endpoint optimization: Based on the extracted feature lines from the center of the gravity points, the algorithm optimized the endpoints and merged the corresponding endpoints. This optimization addressed the issue of the inward shrinkage of the extracted feature lines compared to the actual feature lines.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, D.W.; Ji, S.P.; Liu, J.; Wei, S.Q. Automatic 3D building reconstruction from multi-view aerial images with deep learning. ISPRS J. Photogramm. Remote Sens. 2021, 171, 155–170. [Google Scholar] [CrossRef]
- Li, M.L.; Nan, L.L.; Smith, N.; Wonka, P. Reconstructing building mass models from UAV images. Comput. Graph. 2016, 54, 84–93. [Google Scholar] [CrossRef]
- Huang, J.; Stoter, J.; Peters, R.; Nan, L.L. City3D: Large-Scale Building Reconstruction from Airborne LiDAR Point Clouds. Remote Sens. 2022, 14, 2254. [Google Scholar] [CrossRef]
- Pahlavani, P.; Amirkolaee, H.A.; Bigdeli, B. 3D reconstruction of buildings from LiDAR data considering various types of roof structures. Int. J. Remote Sens. 2017, 38, 1451–1482. [Google Scholar] [CrossRef]
- Li, Z.X.; Shan, J. RANSAC-based multi primitive building reconstruction from 3D point clouds. ISPRS J. Photogramm. Remote Sens. 2022, 185, 247–260. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Li, Z.X.; Shan, J. Optimal Model Fitting for Building Reconstruction From Point Clouds. IEEE J. Sel. Top. Appl. Earth. Observ. Remote Sens. 2021, 14, 9636–9650. [Google Scholar] [CrossRef]
- Li, L.; Song, N.; Sun, F.; Liu, X.Y.; Wang, R.S.; Yao, J.; Cao, S.S. Point2Roof: End-to-end 3D building roof modeling from airborne LiDAR point clouds. ISPRS J. Photogramm. Remote Sens. 2022, 193, 17–28. [Google Scholar] [CrossRef]
- Poullis, C. A Framework for Automatic Modeling from Point Cloud Data. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2563–2575. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M. Automatic evaluation and improvement of roof segments for modelling missing details using Lidar data. Int. J. Remote Sens. 2020, 41, 4702–4725. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Gilani, S.A.N.; Siddiqui, F.U. An Effective Data-Driven Method for 3-D Building Roof Reconstruction and Robust Change Detection. Remote Sens. 2018, 10, 1512. [Google Scholar] [CrossRef]
- Cappelle, C.; El Najjar, M.E.; Charpillet, F.; Pomorski, D. Virtual 3D city model for navigation in urban areas. J. Intell. Robot. Syst. 2012, 66, 377–399. [Google Scholar] [CrossRef]
- Van Genderen, J.L. Airborne and terrestrial laser scanning. Int. J. Digit. Earth 2011, 4, 183–184. [Google Scholar] [CrossRef]
- Lin, Y.B.; Wang, C.; Cheng, J.; Chen, B.L.; Jia, F.K.; Chen, Z.G.; Li, J. Line segment extraction for large scale unorganized point clouds. ISPRS J. Photogramm. Remote Sens. 2015, 102, 172–183. [Google Scholar] [CrossRef]
- Zheng, Y.F.; Weng, Q.H.; Zheng, Y.X. A Hybrid Approach for Three-Dimensional Building Reconstruction in Indianapolis from LiDAR Data. Remote Sens. 2017, 9, 310. [Google Scholar] [CrossRef]
- Zheng, Y.F.; Weng, Q.H. Model-Driven Reconstruction of 3-D Buildings Using LiDAR Data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1541–1545. [Google Scholar] [CrossRef]
- Wang, Y.J.; Xu, H.; Cheng, L.; Li, M.C.; Wang, Y.J.; Xia, N.; Chen, Y.M.; Tang, Y. Three-Dimensional Reconstruction of Building Roofs from Airborne LiDAR Data Based on a Layer Connection and Smoothness Strategy. Remote Sens. 2016, 8, 415. [Google Scholar] [CrossRef]
- Yan, Y.M.; Wang, Z.L.; Xu, C.G.; Su, N. GEOP-Net: Shape Reconstruction of Buildings from LiDAR Point Clouds. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Dey, E.K.; Kurdi, F.T.; Awrangjeb, M.; Stantic, B. Effective Selection of Variable Point Neighbourhood for Feature Point Extraction from Aerial Building Point Cloud Data. Remote Sens. 2021, 13, 1520. [Google Scholar] [CrossRef]
- Ni, H.; Lin, X.; Ning, X.; Zhang, J. Edge Detection and Feature Line Tracing in 3D-Point Clouds by Analyzing Geometric Properties of Neighborhoods. Remote Sens. 2016, 8, 710. [Google Scholar] [CrossRef]
- Chen, X.; Yu, K. Feature Line Generation and Regularization from Point Clouds. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9779–9790. [Google Scholar] [CrossRef]
- Cai, Z.; Ma, H.C.; Zhang, L. Extraction of Roof Feature Lines Based on Geometric Constraints from Airborne LiDAR Data. Remote Sens. 2023, 15, 5493. [Google Scholar] [CrossRef]
- Li, Y.F.; Gao, G.; Cao, B.; Zhong, L.; Liu, Y. Building boundaries extaction from point clouds using dual-threshold Alpha Shapes. In Proceedings of the 2015 23rd International Conference on Geoinformatics, Wuhan, China, 19–21 June 2015. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, L.Y.; Hu, C.X.; Cheng, L. Extraction of building contours from airborne LiDAR point cloud using variable radius Alpha Shapes method. J. Image Graph. 2021, 26, 910–923. [Google Scholar] [CrossRef]
- Xu, B.; Jiang, W.S.; Shan, J.; Zhang, J.; Li, L.L. Investigation on the Weighted RANSAC Approaches for Building Roof Plane Segmentation from LiDAR Point Clouds. Remote Sens. 2016, 8, 5. [Google Scholar] [CrossRef]
- Chen, Y.F. Research on Airborne LiDAR Points CloudData Building Reconstruction Technology. Master’s Thesis, PLA Information Engineering University, Zhengzhou, China, 2013. [Google Scholar]
- Cao, R.J.; Zhang, Y.J.; Liu, X.Y.; Zhao, Z.Z. 3D building roof reconstruction from airborne LiDAR point clouds: A framework based on a spatial database. Int. J. Geogr. Inf. Sci. 2017, 31, 1359–1380. [Google Scholar] [CrossRef]
- Xiao, Y.; Wang, C.; Li, J.; Zhang, W.M.; Xi, X.H.; Wang, C.L.; Dong, P.L. Building segmentation and modeling from airborne LiDAR data. Int. J. Digit. Earth 2015, 8, 694–709. [Google Scholar] [CrossRef]
- Sampath, A.; Shan, J. Segmentation and Reconstruction of Polyhedral Building Roofs from Aerial Lidar Point Clouds. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1554–1567. [Google Scholar] [CrossRef]
- Sohn, G.; Huang, X.F.; Tao, V. Using a Binary Space Partitioning Tree for Reconstructing Polyhedral Building Models from Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2008, 74, 1425–1438. [Google Scholar] [CrossRef]
- Wang, X.; Ji, S.P. Roof Plane Segmentation FROM LiDAR Point Cloud Data Using Region Expansion Based L0 Gradient Minimization and Graph Cut. IEEE J. Sel. Top. Appl. Earth. Observ. Remote Sens. 2021, 14, 10101–10116. [Google Scholar] [CrossRef]
- Ruisheng, W.; Shangfeng, H.; Hongxin, Y. Building3D: A Urban-Scale Dataset and Benchmarks for Learning Roof Structures from Point Clouds. In Proceedings of the 7th National Lidar Conference, Jiaozuo, China, 20–22 October 2023. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | |
|---|---|---|---|---|---|---|---|---|---|
| Reference [21] | 82.95 | 84.14 | 40.25 | 52.69 | 60.16 | 55.78 | 59.63 | 85.69 | 73.69 |
| Reference [25] | 79.76 | 82.43 | 81.58 | 83.08 | 80.06 | 81.08 | 84.96 | 83.46 | - |
| Ours | 91.84 | 88.79 | 89.62 | 88.24 | 89.48 | 88.92 | 89.03 | 90.31 | 92.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Wang, J.; Zang, D.; Xie, X. A Feature Line Extraction Method for Building Roof Point Clouds Considering the Grid Center of Gravity Distribution. Remote Sens. 2024, 16, 2969. https://doi.org/10.3390/rs16162969
Yu J, Wang J, Zang D, Xie X. A Feature Line Extraction Method for Building Roof Point Clouds Considering the Grid Center of Gravity Distribution. Remote Sensing. 2024; 16(16):2969. https://doi.org/10.3390/rs16162969
Chicago/Turabian StyleYu, Jinzheng, Jingxue Wang, Dongdong Zang, and Xiao Xie. 2024. "A Feature Line Extraction Method for Building Roof Point Clouds Considering the Grid Center of Gravity Distribution" Remote Sensing 16, no. 16: 2969. https://doi.org/10.3390/rs16162969
APA StyleYu, J., Wang, J., Zang, D., & Xie, X. (2024). A Feature Line Extraction Method for Building Roof Point Clouds Considering the Grid Center of Gravity Distribution. Remote Sensing, 16(16), 2969. https://doi.org/10.3390/rs16162969