
Efficient and Robust Adaptive Beamforming Based on Coprime Array Interpolation



Abstract
1. Introduction
- We expand the coprime array’s effective aperture through coaxial array interpolation, constructing and interpolating it to achieve a higher-dimensional covariance matrix;
- We construct a projection matrix using the eigen-subspace method to eliminate unwanted signal information from the received signals of the array, resulting in a matrix with minimal SOI information.
- We propose an efficient and robust adaptive beamforming algorithm for coprime arrays, which employs GLQ approximation for the integral computation of the power spectrum. This approach achieves an accurate INCM and significantly reduces computational complexity;
2. Signal Model and Proposed Algorithm
2.1. Signal Model for Adaptive Beamforming
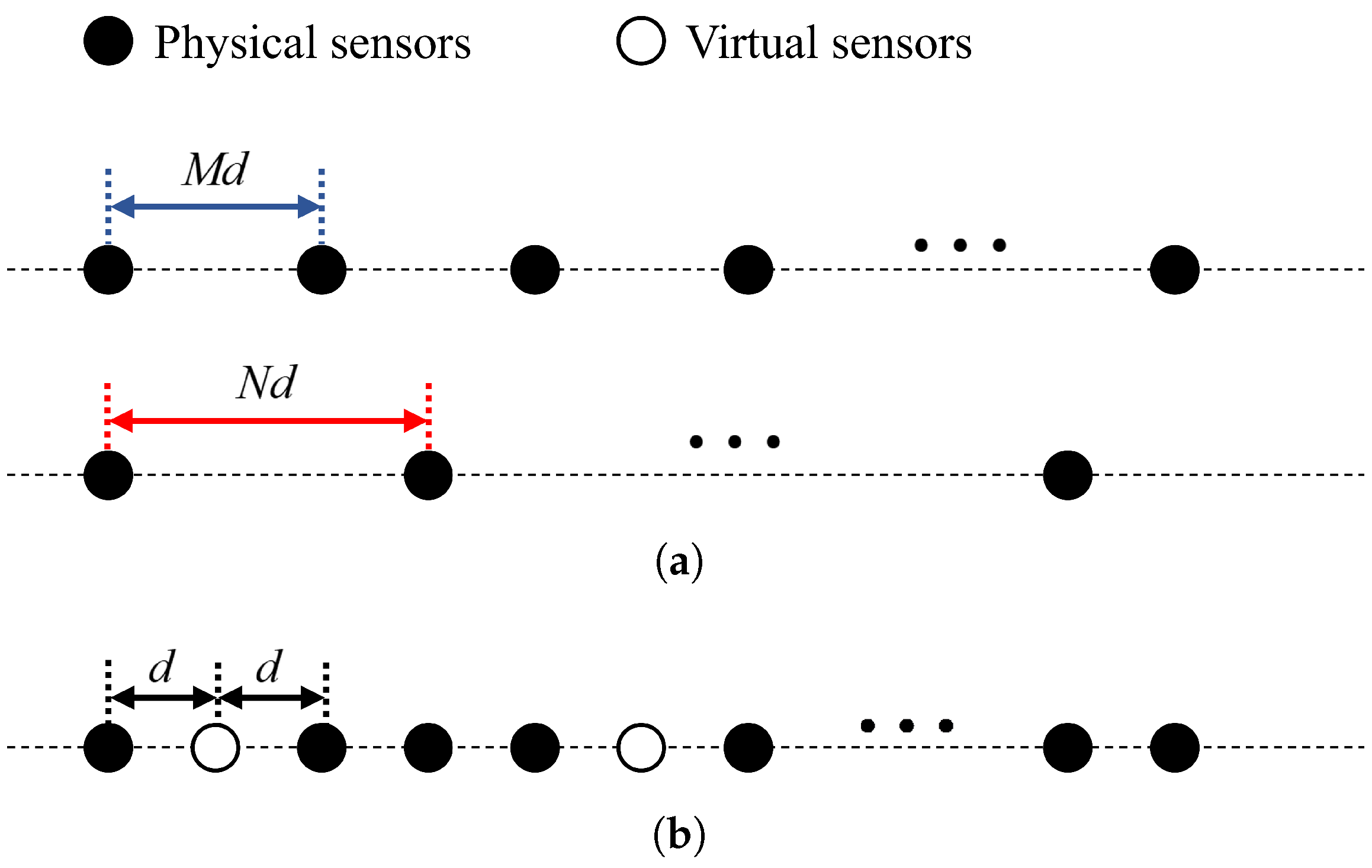
2.2. Coprime Array Interpolation Algorithm
| Algorithm 1: Covariance matrix reconstruction based on coprime array interpolation |
|
2.3. Pre-Estimated INCM
2.4. INCM Reconstruction
| Algorithm 2: The implementation process of the proposed robust adaptive beamforming |
|
2.5. Algorithm Performance Analysis
3. Simulation and Experimental Results
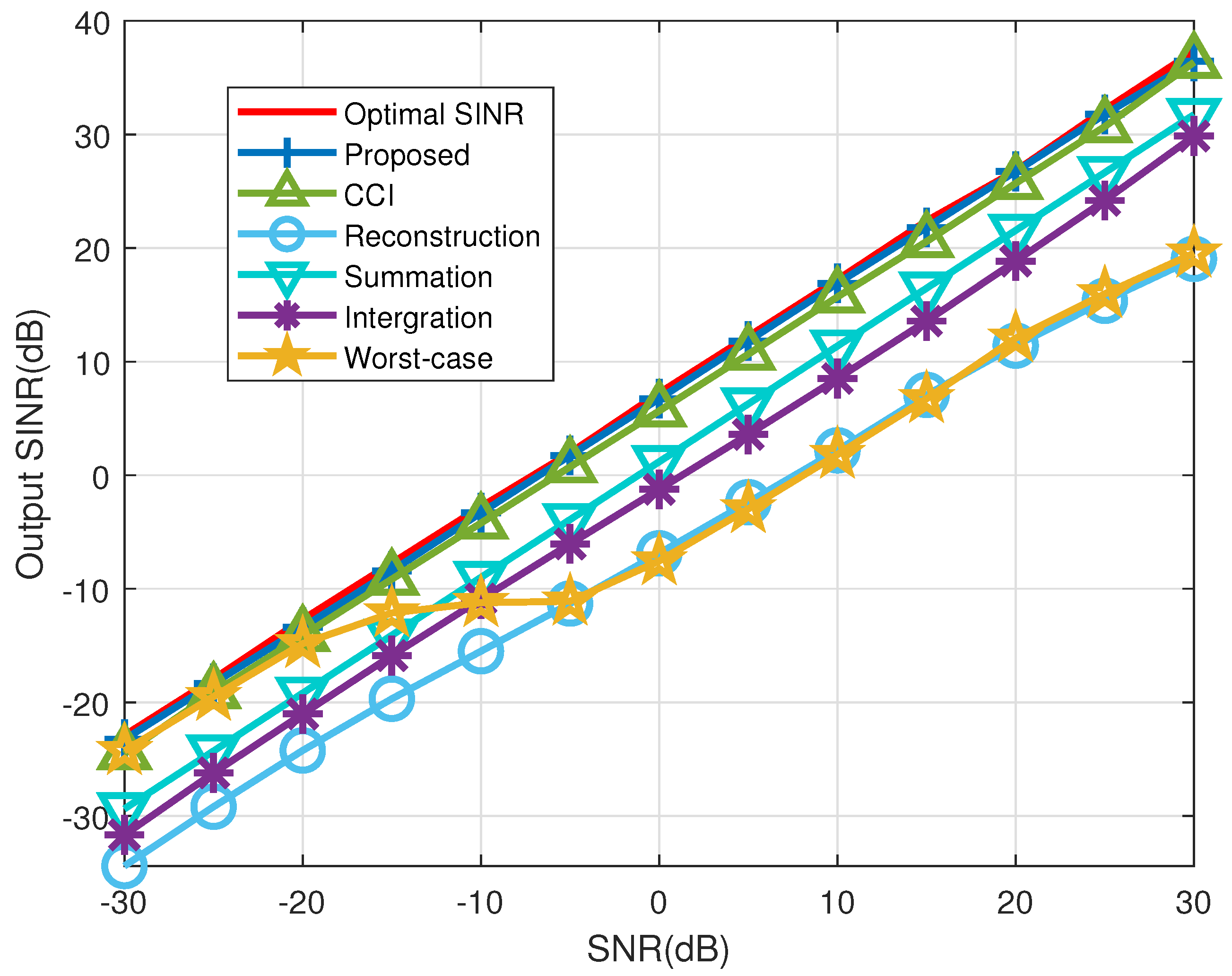
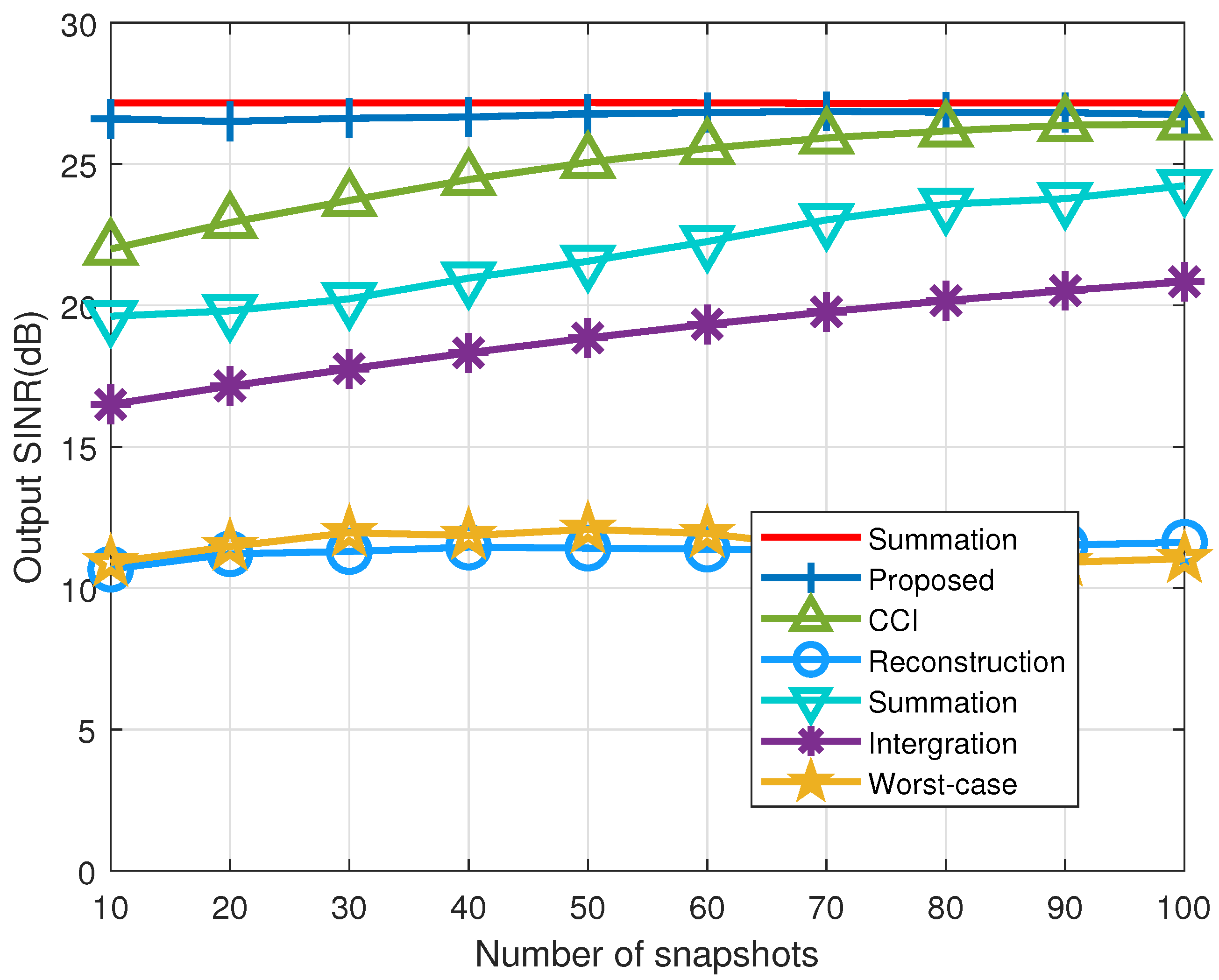
3.1. Example 1: Known Signal Steering Vector
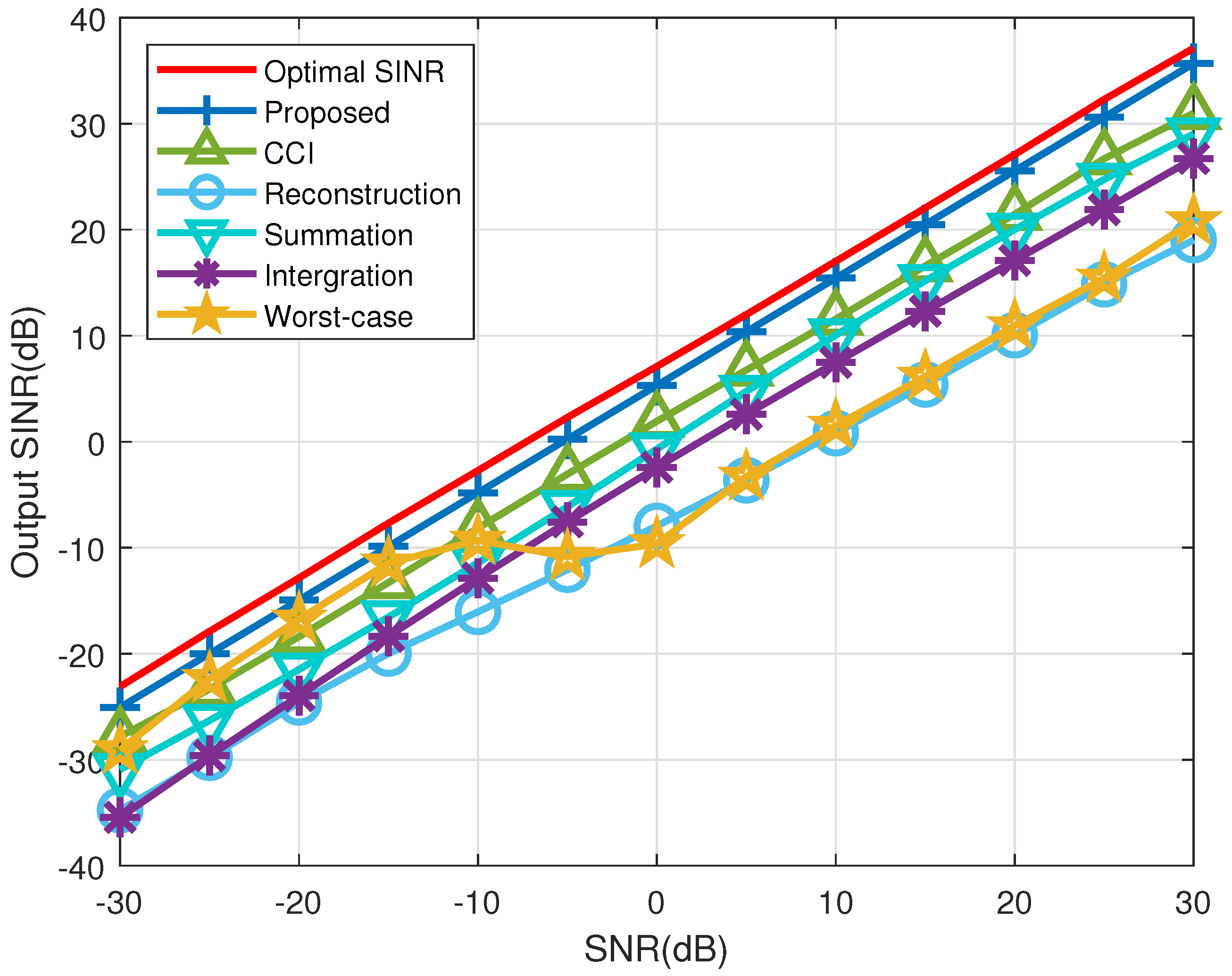
3.2. Example 2: Mismatch Due to Signal Look Direction Error
3.3. Example 3: Gain and Phase Mismatch
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ULAs | Uniform Linear Arrays |
| DOF | Degrees of Freedom |
| DOA | Direction-of-arrival |
| INCM | Interference-plus-Noise Covariance Matrix |
| MVDR | Minimum Variance Distortionless Response |
| SOI | Signal of Interest |
| NLAs | Non-Uniform Linear Arrays |
| SCM | Sample Covariance Matrix |
| GLQ | Gauss–Legendre Quadrature |
| URG | Unwanted Signal Removal and Employs Gauss–Legendre Quadrature |
| SMI | Sample Matrix Inversion |
| CCI | Coprime Coarray Interpolation |
| SINR | Signal-to-Interference-plus-Noise Ratio |
| SNR | Signal-to-Noise Ratio |
| INR | Interference-to-Noise Ratio |
References
- Fabrizio, G.A.; Gershman, A.B.; Turley, M.D. Robust adaptive beamforming for HF surface wave over-the-horizon radar. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 510–525. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. Robust Adaptive Beamforming; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Xiang, C.; Feng, D.Z.; Lv, H.; He, J.; Cao, Y. Robust adaptive beamforming for MIMO radar. Signal Process. 2010, 90, 3185–3196. [Google Scholar] [CrossRef]
- Xu, J.; Liao, G.; Huang, L.; So, H.C. Robust adaptive beamforming for fast-moving target detection with FDA-STAP radar. IEEE Trans. Signal Process. 2016, 65, 973–984. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, Y.; Liu, X.; Jiang, R.; Shen, B. Adaptive beamforming design of planar arrays based on Bayesian compressive sensing. IEEE Sens. J. 2020, 21, 5185–5194. [Google Scholar] [CrossRef]
- Liu, C.; Li, M.; Zhao, L.; Whiting, P.; Hanly, S.V.; Collings, I.B.; Zhao, M. Robust adaptive beam tracking for mobile millimetre wave communications. IEEE Trans. Wirel. Commun. 2020, 20, 1918–1934. [Google Scholar] [CrossRef]
- Chang, S.; Deng, Y.; Zhang, Y.; Zhao, Q.; Wang, R.; Zhang, K. An advanced scheme for range ambiguity suppression of spaceborne SAR based on blind source separation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5230112. [Google Scholar] [CrossRef]
- Huang, Y.; Zhou, M.; Vorobyov, S.A. New designs on MVDR robust adaptive beamforming based on optimal steering vector estimation. IEEE Trans. Signal Process. 2019, 67, 3624–3638. [Google Scholar] [CrossRef]
- Yazdi, N.; Todros, K. Measure-transformed MVDR beamforming. IEEE Signal Process. Lett. 2020, 27, 1959–1963. [Google Scholar] [CrossRef]
- Shahbazpanahi, S.; Gershman, A.B.; Luo, Z.Q.; Wong, K.M. Robust adaptive beamforming using worst-case SINR optimization: A new diagonal loading-type solution for general-rank signal models. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, 2003 (ICASSP’03), Hong Kong, China, 6–10 April 2003; Volume 5, p. V-333. [Google Scholar] [CrossRef]
- Elnashar, A.; Elnoubi, S.M.; El-Mikati, H.A. Further study on robust adaptive beamforming with optimum diagonal loading. IEEE Trans. Antennas Propag. 2006, 54, 3647–3658. [Google Scholar] [CrossRef]
- Lin, J.R.; Peng, Q.C.; Shao, H.Z. On Diagonal Loading for Robust Adaptive Beamforming Based on Worst-Case Performance Optimization. ETRI J. 2007, 29, 50–58. [Google Scholar] [CrossRef]
- Du, L.; Li, J.; Stoica, P. Fully automatic computation of diagonal loading levels for robust adaptive beamforming. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 449–458. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, X.; Zhang, A. A simple tridiagonal loading method for robust adaptive beamforming. Signal Process. 2019, 157, 103–107. [Google Scholar] [CrossRef]
- Gao, J.; Zhen, J.; Lv, Y.; Guo, B. Beamforming technique based on adaptive diagonal loading in wireless access networks. Ad Hoc Netw. 2020, 107, 102249. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, X.; Yang, H.; Li, W. Robust adaptive beamforming via covariance matrix reconstruction with diagonal loading on interference sources covariance matrix. Digit. Signal Process. 2023, 136, 103977. [Google Scholar] [CrossRef]
- Youn, W.S.; Un, C.K. Robust adaptive beamforming based on the eigenstructure method. IEEE Trans. Signal Process. 1994, 42, 1543–1547. [Google Scholar] [CrossRef]
- Choi, Y.H. Eigenstructure-based adaptive beamforming for coherent and incoherent interference cancellation. IEICE Trans. Commun. 2002, 85, 633–640. [Google Scholar]
- Huang, F.; Sheng, W.; Ma, X. Modified projection approach for robust adaptive array beamforming. Signal Process. 2012, 92, 1758–1763. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, B.; Ye, Z. Robust adaptive beamforming using a new projection approach. In Proceedings of the 2015 IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 1181–1185. [Google Scholar]
- Yi, S.; Wu, Y.; Wang, Y. Projection-based robust adaptive beamforming with quadratic constraint. Signal Process. 2016, 122, 65–74. [Google Scholar] [CrossRef]
- Yang, X.; Li, Y.; Liu, F.; Lan, T.; Long, T.; Sarkar, T.K. Robust adaptive beamforming based on covariance matrix reconstruction with annular uncertainty set and vector space projection. IEEE Antennas Wirel. Propag. Lett. 2020, 20, 130–134. [Google Scholar] [CrossRef]
- Guo, J.; Yang, H.; Ye, Z. A novel robust adaptive beamforming algorithm based on subspace orthogonality and projection. IEEE Sens. J. 2023, 23, 12076–12083. [Google Scholar] [CrossRef]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q.; Ma, N. Adaptive beamforming with joint robustness against mismatched signal steering vector and interference nonstationarity. IEEE Signal Process. Lett. 2004, 11, 108–111. [Google Scholar] [CrossRef]
- Hassanien, A.; Vorobyov, S.A.; Wong, K.M. Robust adaptive beamforming using sequential quadratic programming: An iterative solution to the mismatch problem. IEEE Signal Process. Lett. 2008, 15, 733–736. [Google Scholar] [CrossRef]
- Vorobyov, S.A. Principles of minimum variance robust adaptive beamforming design. Signal Process. 2013, 93, 3264–3277. [Google Scholar] [CrossRef]
- Somasundaram, S.D.; Butt, N.R.; Jakobsson, A.; Hart, L. Low-complexity uncertainty-set-based robust adaptive beamforming for passive sonar. IEEE J. Ocean. Eng. 2015. Early Access. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, J.; Xu, X.; Ye, Z. Robust adaptive beamforming with a novel interference-plus-noise covariance matrix reconstruction method. IEEE Trans. Signal Process. 2015, 63, 1643–1650. [Google Scholar] [CrossRef]
- Liao, B.; Guo, C.; Huang, L.; Li, Q.; Liao, G.; So, H.C. Robust adaptive beamforming with random steering vector mismatch. Signal Process. 2016, 129, 190–194. [Google Scholar] [CrossRef]
- Zhuang, J.; Shi, B.; Zuo, X.; Ali, A.H. Robust adaptive beamforming with minimum sensitivity to correlated random errors. Signal Process. 2017, 131, 92–98. [Google Scholar] [CrossRef]
- Liao, B.; Guo, C.; Huang, L.; Li, Q.; So, H.C. Robust adaptive beamforming with precise main beam control. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 345–356. [Google Scholar] [CrossRef]
- Feng, Y.; Liao, G.; Xu, J.; Zhu, S.; Zeng, C. Robust adaptive beamforming against large steering vector mismatch using multiple uncertainty sets. Signal Process. 2018, 152, 320–330. [Google Scholar] [CrossRef]
- Chen, P.; Yang, Y. An uncertainty-set-shrinkage-based covariance matrix reconstruction algorithm for robust adaptive beamforming. Multidimens. Syst. Signal Process. 2021, 32, 263–279. [Google Scholar] [CrossRef]
- Huang, Y.; Fu, H.; Vorobyov, S.A.; Luo, Z.Q. Robust adaptive beamforming via worst-case SINR maximization with nonconvex uncertainty sets. IEEE Trans. Signal Process. 2023, 71, 218–232. [Google Scholar] [CrossRef]
- Gu, Y.; Leshem, A. Robust adaptive beamforming based on interference covariance matrix reconstruction and steering vector estimation. IEEE Trans. Signal Process. 2012, 60, 3881–3885. [Google Scholar]
- Gu, Y.; Goodman, N.A.; Hong, S.; Li, Y. Robust adaptive beamforming based on interference covariance matrix sparse reconstruction. Signal Process. 2014, 96, 375–381. [Google Scholar] [CrossRef]
- Shen, F.; Chen, F.; Song, J. Robust adaptive beamforming based on steering vector estimation and covariance matrix reconstruction. IEEE Commun. Lett. 2015, 19, 1636–1639. [Google Scholar] [CrossRef]
- Yuan, X.; Gan, L. Robust adaptive beamforming via a novel subspace method for interference covariance matrix reconstruction. Signal Process. 2017, 130, 233–242. [Google Scholar] [CrossRef]
- Zheng, Z.; Zheng, Y.; Wang, W.Q.; Zhang, H. Covariance matrix reconstruction with interference steering vector and power estimation for robust adaptive beamforming. IEEE Trans. Veh. Technol. 2018, 67, 8495–8503. [Google Scholar] [CrossRef]
- Zhu, X.; Xu, X.; Ye, Z. Robust adaptive beamforming via subspace for interference covariance matrix reconstruction. Signal Process. 2020, 167, 107289. [Google Scholar] [CrossRef]
- Yang, H.; Wang, P.; Ye, Z. Robust adaptive beamforming via covariance matrix reconstruction under colored noise. IEEE Signal Process. Lett. 2021, 28, 1759–1763. [Google Scholar] [CrossRef]
- Li, H.; Geng, J.; Xie, J. Robust adaptive beamforming based on covariance matrix reconstruction with RCB principle. Digit. Signal Process. 2022, 127, 103565. [Google Scholar] [CrossRef]
- Yang, H.; Ye, Z. Robust adaptive beamforming based on covariance matrix reconstruction via steering vector estimation. IEEE Sens. J. 2022, 23, 2932–2939. [Google Scholar] [CrossRef]
- Ge, S.; Fan, C.; Wang, J.; Huang, X. Robust adaptive beamforming based on sparse Bayesian learning and covariance matrix reconstruction. IEEE Commun. Lett. 2022, 26, 1893–1897. [Google Scholar] [CrossRef]
- Luo, T.; Chen, P.; Cao, Z.; Zheng, L.; Wang, Z. URGLQ: An efficient covariance matrix reconstruction method for robust adaptive beamforming. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5634–5645. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P. Super nested arrays: Linear sparse arrays with reduced mutual coupling—Part I: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Zhou, C.; Shi, Z.; Gu, Y. Coprime array adaptive beamforming with enhanced degrees-of-freedom capability. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1357–1361. [Google Scholar]
- Zheng, Z.; Wang, W.Q.; Kong, Y.; Zhang, Y.D. MISC array: A new sparse array design achieving increased degrees of freedom and reduced mutual coupling effect. IEEE Trans. Signal Process. 2019, 67, 1728–1741. [Google Scholar] [CrossRef]
- Wagner, M.; Park, Y.; Gerstoft, P. Gridless DOA estimation and root-MUSIC for non-uniform linear arrays. IEEE Trans. Signal Process. 2021, 69, 2144–2157. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Li, S.; Zhang, X.P. A new approach to construct virtual array with increased degrees of freedom for moving sparse arrays. IEEE Signal Process. Lett. 2020, 27, 805–809. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Fan, X.; Shi, Z.; Mao, G.; Zhang, Y.D. Direction-of-arrival estimation for coprime array via virtual array interpolation. IEEE Trans. Signal Process. 2018, 66, 5956–5971. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Shi, Z.; Zhang, Y.D. Off-grid direction-of-arrival estimation using coprime array interpolation. IEEE Signal Process. Lett. 2018, 25, 1710–1714. [Google Scholar] [CrossRef]
- Zheng, Z.; Huang, Y.; Wang, W.Q.; So, H.C. Direction-of-arrival estimation of coherent signals via coprime array interpolation. IEEE Signal Process. Lett. 2020, 27, 585–589. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; Shi, Z.; Haardt, M. Direction-of-arrival estimation for coprime arrays via coarray correlation reconstruction: A one-bit perspective. In Proceedings of the 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 8–11 June 2020; pp. 1–4. [Google Scholar]
- Shi, J.; Wen, F.; Liu, Y.; Liu, Z.; Hu, P. Enhanced and generalized coprime array for direction of arrival estimation. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 1327–1339. [Google Scholar] [CrossRef]
- Li, W.; Xu, X.; Huang, X.; Yang, Y. Direction-of-arrival estimation for coherent signals exploiting moving coprime array. IEEE Signal Process. Lett. 2023, 30, 304–308. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2017, 67, 1099–1112. [Google Scholar] [CrossRef]
- Zheng, Z.; Yang, T.; Wang, W.Q.; Zhang, S. Robust adaptive beamforming via coprime coarray interpolation. Signal Process. 2020, 169, 107382. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, W.; Leng, W.; Wang, A.; Shi, H. Interference-plus-noise covariance matrix reconstruction via spatial power spectrum sampling for robust adaptive beamforming. IEEE Signal Process. Lett. 2015, 23, 121–125. [Google Scholar] [CrossRef]
- Ruan, H.; de Lamare, R.C. Robust adaptive beamforming based on low-rank and cross-correlation techniques. IEEE Trans. Signal Process. 2016, 64, 3919–3932. [Google Scholar] [CrossRef]
- Duan, Y.; Yu, X.; Mei, L.; Cao, W. Low-complexity robust adaptive beamforming based on INCM reconstruction via subspace projection. Sensors 2021, 21, 7783. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning |
|---|---|
| Identity matrix | |
| Zero matrix | |
| ∗ | Complex conjugate |
| T | Transpose |
| H | Conjugate transpose |
| Statistical expectation | |
| Frobenius norm | |
| Nuclear norm | |
| Rank of a matrix | |
| Vectorization operator | |
| Diagonal matrix formed from the elements of the vector | |
| is positive definite | |
| ith component of the vector | |
| Value of at index n | |
| Cardinality of the set | |
| ⊗ | Kronecker product |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Wu, X.; Li, S.; Deng, W.; Zhang, X. Efficient and Robust Adaptive Beamforming Based on Coprime Array Interpolation. Remote Sens. 2024, 16, 2792. https://doi.org/10.3390/rs16152792
Chen S, Wu X, Li S, Deng W, Zhang X. Efficient and Robust Adaptive Beamforming Based on Coprime Array Interpolation. Remote Sensing. 2024; 16(15):2792. https://doi.org/10.3390/rs16152792
Chicago/Turabian StyleChen, Siming, Xiaochuan Wu, Shujie Li, Weibo Deng, and Xin Zhang. 2024. "Efficient and Robust Adaptive Beamforming Based on Coprime Array Interpolation" Remote Sensing 16, no. 15: 2792. https://doi.org/10.3390/rs16152792
APA StyleChen, S., Wu, X., Li, S., Deng, W., & Zhang, X. (2024). Efficient and Robust Adaptive Beamforming Based on Coprime Array Interpolation. Remote Sensing, 16(15), 2792. https://doi.org/10.3390/rs16152792