Abstract
This study investigates the relationship between geomagnetic activities and ionospheric scintillations, focusing on how solar and geomagnetic parameters influence ionospheric disturbances across varying time frames and latitudes. Utilizing indices such as Kp, Dst, sunspot numbers, and the F10.7 solar flux, we elucidate the dynamics influencing ionospheric conditions, which are vital for the reliability of satellite communications, particularly in low-latitude regions. Our analysis demonstrates a clear correlation between periods of high solar activity and increased geomagnetic disturbances, leading to heightened ionospheric scintillations, such as occurred during the solar maximum of 2015. In contrast, 2020—a solar minimum period—exhibited fewer disturbances, highlighting the impact of solar activity levels on ionospheric conditions. Innovatively employing ConvGRU networks, this research advances the modeling and prediction of ionospheric scintillations by integrating deep learning techniques suited to the spatiotemporal complexities of ionospheric data. The ConvGRU model effectively captures both temporal sequences and spatial distributions, offering enhanced accuracy in depicting ionospheric scintillation patterns crucial for satellite-based navigation and communication systems. Ground-based GNSS data from 121 stations across South America, collected during 2015 and 2020, provide a robust dataset for our analysis. The study highlights the influence of the solar cycle on ionospheric scintillations, with the years of maximum and minimum solar activity showing significant differences in scintillation intensity and frequency. Our evaluation of the ConvGRU models using statistical parameters demonstrated their potential for reliable ionospheric scintillation prediction. The research underscores the necessity of integrating adaptive mechanisms within models to effectively handle the dynamic nature of ionospheric disturbances influenced by external geomagnetic and solar factors. This study enhances the understanding of ionospheric scintillations and significantly advances predictive modeling capabilities using advanced machine learning techniques. The potential establishment of real-time alert systems for ionospheric disturbances could significantly benefit civilian applications, enhancing the operational efficiency of technologies reliant on accurate ionospheric information.
1. Introduction
The formation of ionospheric plasma irregularities induces ionospheric scintillations, significantly affecting radio signals traversing the ionosphere. This phenomenon has substantial implications for the functionality of satellite navigation systems and radio communications, particularly for L-band radio signals, causing disturbances in both amplitude and phase, termed phase and amplitude scintillations [1,2,3]. Amplitude scintillations are quantified through the carrier-to-noise ratio (C/N0), measuring intensity variations, while phase scintillations involve assessing oscillations in the signal carrier phase [4,5]. The behavioral analysis of ionospheric irregularities is complex, encompassing spatiotemporal variations and the influence of ionospheric layers, solar activities, and the interplanetary magnetic field (IMF). These factors serve as principal contributors to ionospheric disturbances across diverse geographical latitudes, with low latitudes posing unique challenges due to their direct connection to solar wind and magnetospheric disturbances [6]. Equatorial plasma bubbles (EPBs) represent a notable factor in ionospheric scintillations, characterized by large-scale disturbances aligned with the Earth’s magnetic field. EPBs lead to a reduction in ionospheric plasma density, particularly in the lower F-layer near-equatorial regions, with the Earth’s magnetic field playing a significant role [7]. The prevalence of this phenomenon is heightened within the equatorial ionospheric anomaly, situated approximately 15–20 degrees from the magnetic equator in low-latitude areas with elevated electron density [8]. Initiated by upward vector motion, equatorial plasma bubbles expand northward and southward from the equator, causing severe irregularities within the equatorial ionospheric anomaly. This process, characterized by a depleted plasma interacting with denser surrounding plasma, establishes a powerful gradient in the ionospheric structure, resulting in heightened ionospheric scintillations within the equatorial ionospheric anomaly [9].
In regions proximate to the equatorial ionospheric anomaly, around sunset, the vertical motion speed of ionospheric layers experiences an increment. Consequently, this leads to an elevation of the F-layer, subsequently causing an increase in the gradient of lower ionospheric layers. As a result, the level of equatorial plasma instability, referred to as Spread-F, undergoes enhancement [10]. Influential factors on Spread-F include solar cycles, seasonal variations, and local time dependencies. Moreover, the likelihood of Spread-F occurrence is strongly dependent on the geographical latitude of the region. It can be observed that the percentage of occurrence and the characteristics of this phenomenon are considerably variable and different in regions with lower latitudes compared to those at higher geographical latitudes. Regions with lower geographical latitudes typically exhibit more spread-F during the night, near sunset, and in the vicinity of the equinoxes [11]. Ionospheric disturbances occurring in the expanded F-layer region near the equator are a principal factor in the occurrence of ionospheric scintillations, known as Equatorial Spread-F (ESF). ESF events, with varying dimensions ranging from tens to hundreds of kilometers, occur in the magnetic equatorial region. The primary cause of these disturbances is an unstable process known as Rayleigh–Taylor instability, resulting from the vertical motion speed of ionospheric layers and an increase in the gradient of ionospheric layers in the equatorial anomaly region [12]. One of the most significant outcomes of Rayleigh–Taylor instability is the increased vertical plasma speed in the equatorial region, influenced by the background electric field of the magnetic equator [11]. Around sunset, an increase in the local electric field, known as the pre-reversal enhancement electric field (PRE), is observed, creating favorable conditions for the growth of Rayleigh–Taylor instability [13].
The effects of ionospheric disturbances on radio signals can be broadly categorized into three main groups. Initially, this phenomenon can reduce the quantity and quality of receiver measurements. In the second category, it may impact the measurements of permanent GNSS stations, influencing both the quantity and quality of observations. Additionally, it can affect satellite-based measurements relying on inter-satellite communication, particularly for low earth orbit (LEO) satellites, potentially leading to communication loss between satellites, especially in short-duration flights [14]. Ionospheric disturbances can result in the loss or increased noise levels of transmitted signals. Signal fading is a common occurrence, typically lasting less than one second. However, it may take several seconds for the receiver to resume tracking and utilizing the signals for its computations. Signal interruptions significantly affect the receiver’s ability to smooth measurements and reduce noise effectively. Using carrier phase measurements and, subsequently, smoothing code observations, can help reduce noise [15]. When code smoothing is intermittently disrupted or locked onto a satellite due to ionospheric scintillation, errors in carrier phase measurements may occur, leading to the creation of local multi-Path errors, where thermal noise in observations can be magnified by up to 103 times compared to normal conditions. Moreover, ionospheric scintillations can increase high-frequency disturbances in phase measurements, hindering noise reduction [16]. In general, ionospheric scintillation phenomena primarily affect one or two satellites, causing short-term disruptions and increased noise. If signals are appropriately distributed to the receiver, the loss of one or two satellite signals will not significantly impact receiver performance, and processing can continue. However, if the receiver faces weak satellite coverage from the outset, even minimal ionospheric scintillation can cause significant disruptions in receiver observations. During intense ionospheric scintillation events, all satellites may be affected by disruptions originating from this phenomenon, even if the receiver has good satellite coverage. A strong scintillation event can lead to observations being discontinued [17]. Global navigation satellite system (GNSS) services have multiple reference stations. These systems are designed with a considerable number of high-density networks. Ideally, the arrangement of these stations should be such that the removal of one station has minimal impact on network performance. However, if multiple permanent observation stations are strongly affected by ionospheric scintillation in a particular region, they can disrupt the network in that area [18].
The devised statistical methods are based on mathematical and statistical approaches that create models to uncover relationships between input and output variables based on a large amount of input data. Statistical prediction methods include classical parametric time series prediction models, classical machine learning-based time series prediction methods, such as neural networks, and deep learning-based time series prediction methods [19]. Parametric model-based methods have faced challenges in training nonlinear features of data, and traditional neural network methods have struggled with the ability to generalize spatiotemporal features for a long-term time series. Model-based and prediction methods based on deep learning can automatically extract influential information from data and have the capability to learn linear and nonlinear hidden features in a set of high-dimensional input data [20]. Predicting ionospheric scintillation using mathematical models like deep learning, which can model and predict this phenomenon two-dimensionally for a time series, is valuable since a definitive solution for modeling this phenomenon using numerical methods has not been presented so far. Therefore, it can be a promising approach for predicting such phenomena. Deep learning is a subset of machine learning that uses multiple layers for linear transformations to process observational signals such as two-dimensional images or one-dimensional signals [21]. The term “deep learning” generally refers to deep neural networks (DNN). In the context of deep neural networks, the term “deep” refers to the depth of layers within the neural network, considering the method used in the realm of deep learning [22]. Convolutional Neural Networks (CNN) share many similarities with Artificial Neural Networks (ANN). These networks consist of neurons with trainable weights and biases. Each neuron receives multiple inputs, calculates the product of weights and inputs, and finally, using a non-linear activation function, provides an output [23]. Another type of deep neural network, Recurrent Neural Networks (RNN), is useful for processing sequential or time-series data. In RNNs, each neuron or processing unit can maintain an internal state or memory to preserve information related to previous inputs [24]. Long Short-Term Memory (LSTM) networks are a subtype of recurrent neural network designed to address the challenges faced by traditional RNNs in storing information over long time intervals [25]. Gated Recurrent Unit (GRU) networks are considered modified versions of LSTM, utilizing reset and update gates to facilitate the storage and filtering of information from previous time steps more effectively [26].
Over the past two decades, researchers have extensively utilized observations from the GNSS for computing parameters such as ionospheric scintillation amplitude and phase, as well as other parameters like electron density rate of change, to predict ionospheric scintillations. For instance, Das et al. [27] employed a neural network modeling approach to estimate the daily occurrence percentage of ionospheric scintillations over eleven years, using the daily scintillation averages. Rezende et al. [28] developed a model for predicting the occurrence of ionospheric disturbances based on decision tree methodology and utilizing extensive ionospheric scintillation observations at São José dos Campos station during hourly intervals from 20:00 to 24:00 for each day. Prikryl et al. [29] presented a prediction method for ionospheric scintillations using statistical and probability-based approaches, relying on phase carrier observations at high geographic latitudes from GNSS stations. De Lima et al. [30] created a multi-layer perceptron model to forecast ionospheric scintillations based on observations from a single station within the time range of 17:30 to 19:00 UTC, targeting periods with higher scintillation occurrences in equatorial geographic latitudes. In this study, scintillation parameters were categorized into severe and non-severe, based on the S4 index, and a classification model was developed for a 1.5-h interval. Atabati et al. [31] introduced a prediction method for daily ionospheric scintillations, combining a multi-layer perceptron model with a genetic algorithm for single-station observations. Previous work has employed deep learning techniques for the spatiotemporal modeling of ionospheric irregularity parameters such as S4 and ROTI (Rate of TEC index). McGranaghan et al. [32] introduced a predictive model for high-latitude ionospheric phase scintillation, employing a machine learning algorithm known as the support vector machine (SVM). The model, which utilizes a large volume of data from GNSS and sophisticated data-driven discovery tools, showed considerable improvement over the persistence method, particularly for a 1-h lead time. This advancement is crucial to understanding the impact of space weather on trans-ionospheric radio signals, especially at high latitudes where effects are most direct and no reliable predictive capability previously existed. Ruwali et al. [33] focused on a hybrid deep learning model combining LSTM and CNN for forecasting ionospheric TEC. This model effectively extracts local spatial and temporal features from TEC datasets, showcasing the potential of hybrid deep-learning approaches in atmospheric science. Sun et al. [34] discussed the IONISE (Ionospheric Observational Network for Irregularity and Scintillation in East and Southeast Asia) project. They reported preliminary results of ionospheric disturbances and irregularities, including equatorial plasma bubbles and related scintillations, traveling ionospheric disturbances from middle to low latitudes, and the drift of strong, sporadic E structures. This research utilized a convolutional neural network on a five-day time series of geomagnetic data to predict TEC values in Beijing, while Liu et al. [35] used the ConvLSTM network with a custom-designed loss function to forecast the ROTI maps over high latitudes. This study presented a short-term prediction algorithm based on a convolutional neural network for high-latitude ionospheric irregularities during storm events, using GNSS-derived ROTI maps.
In recent years, spatiotemporal learning has garnered attention for time series data, surpassing the traditional unidimensional learning for a time series, as it effectively represents complex spatiotemporal phenomena. Shi et al. [36] proposed a combination of an LSTM network with a convolutional model, termed ConvLSTM, for spatiotemporal data. In this approach, a convolutional neural network is combined with a recurrent neural network, achieving high accuracy in predicting rainfall using radar images. One advantage of ConvLSTM over the CNN and LSTM methods lies in its ability to simultaneously train the network using the temporal and spatial correlations of the data. However, ConvLSTM has a high number of parameters and can easily overfit the data. Considering this issue, the Convolutional Gated Recurrent Unit (ConvGRU) method can be employed as a multi-step spatiotemporal prediction approach, leveraging a multi-step prediction strategy for multiple input and output tensors. To achieve this, a two-step model of an Encoder and Forecaster is used to generate a tensor from an input matrix to an output matrix with consistent dimensions, ensuring accurate prediction results [37]. In this study, a combined approach of deep learning networks was employed for spatiotemporal prediction in a time series. The use of the ConvGRU method was found to be more suitable for datasets such as the ionospheric scintillation parameter (S4), which utilizes spatial and temporal data for network training and subsequent observational-parameter prediction, compared to other methods. Establishing a real-time or near-real-time alert system for events like ionospheric disturbances, including ionospheric scintillation, has extensive applications in both non-military and military sectors. It can significantly impact industries such as aircraft navigation, modern agriculture, mapping, and ground and satellite radio communications. Despite recent advancements in identifying and mitigating the effects of ionospheric disturbances and climatology on ionospheric scintillations, predicting the occurrence and intensity of ionospheric disturbances leading to scintillations remains challenging. Therefore, modeling and forecasting ionospheric disturbances, such as ionospheric scintillations, can reduce the impact of ionospheric errors in observations from GNSS satellites, ultimately enhancing the accuracy of satellite communication and navigation systems [38].
Our research commences by delineating the parameters for ionospheric scintillations derived from GNSS ground-based data, utilized to detect and analyze ionospheric disturbances. We introduce spatiotemporal ConvGRU-based models in the methodology section, specifically engineered for predicting these disturbances over both spatial and temporal scales. The proposed model integrates a tailored loss function to enhance prediction accuracy, facilitating the spatiotemporal prediction of ionospheric scintillation with enhanced precision. In the results section, we first define the geographical scope of our study before presenting the numerical outcomes derived from the predictive model, showcased in a near-real-time format. This includes a display of observed values at key diurnal intervals and a detailed comparative analysis of the predicted versus observed values, emphasizing the accuracy and reliability of each model iteration. The evaluation section further employs rigorous statistical methods to assess the model’s efficacy in predicting ionospheric scintillations, thus providing a comprehensive overview of the model’s performance under various atmospheric conditions. This holistic approach underscores the model’s potential to contribute to our understanding and forecasting of complex ionospheric behaviors.
2. Data Collection
Ionospheric scintillations can be discerned through parameters such as Total Electron Content (TEC), rate of TEC index, and amplitude scintillation [39]. Slant TEC (STEC) is ascertained by measuring the path of GNSS signals from the ground to the satellite, focusing on the intersection with the ionosphere at the Ionospheric Pierce Point (IPP). This intersection allows for the calculation of STEC at a specific altitude within the ionosphere [40]. Further, the line-of-sight STEC observations enable the derivation of the Vertical TEC (VTEC) mapping function as follows:
where the elevation angle ε, which signifies the angle between the GNSS receiver and the satellite, Earth’s radius R, and the ionospheric layer’s altitude h, are crucial parameters. The focus is on ionospheric measurements at an altitude of approximately 450 km. In this investigation, the S4 parameter was employed to detect ionospheric amplitude scintillation. The categorization of ionospheric irregularities was based on the carrier-to-noise density (C/N0) parameter, derived from data acquired by GNSS receivers [41]. The C/N0 was determined using S1 and S2 values from the GNSS data file. The signal-to-noise ratio (S/N0) was calculated from C/N0, per Equation (3), followed by a detrending process outlined in Equation (4). The resulting detrended S/N0 values () were computed in the following manner [42,43]:
where, “fs” denotes the interval between samples, while “SI” refers to the signal intensity after detrending, quantified using the signal-to-noise ratio (S/N0). The S4 parameter in question was derived using the methodology laid out in Equation (3) and Equation (4) as follows:
The S4 parameter is defined as the normalized standard deviation of the Signal Intensity (SI) for each relevant epoch, calculated relative to the mean SI over the chosen interval, and is unitless. These parameters elucidate the intensity of the signal-to-noise ratio for waves transmitted via L1 and L2 frequencies from the satellite [44]. The application of S4 spans various durations, from several seconds to hours, contingent on the model’s requirements. For the purposes of this research, S4 values are computed based on average data collected over five-minute periods [45]. In the context of ionospheric scintillation analysis, categorization of the scintillation’s intensity and type can be effectively accomplished by establishing a threshold criterion for the S4 index values. This approach allows for a structured classification as detailed subsequently [46]:
Upon analysis using Equation (6), it is apparent that the variable S4 can be categorized into four distinct states, delineated by specified threshold values. This classification facilitates a systematic evaluation of ionospheric scintillation behavior based on the quantified S4 parameter.
3. Methodology
This section of the article discusses the proposed method for the modeling and subsequent prediction of spatiotemporal ionospheric scintillation. As a significant branch of artificial intelligence, machine learning focuses on developing and discovering methods and algorithms enabling computers and systems to learn and adapt. Specifically, machine learning, a subset of artificial intelligence, empowers machines to learn without explicit programming [47]. Neural networks, a machine learning method, are effective for modeling and predicting both linear and nonlinear parameters, including those related to the ionosphere. These networks, less impacted by noisy data, can utilize such data for extensive observations [48]. Each neural network comprises numerous neurons (nodes) and connecting weights. Input data are multiplied by corresponding weights and summed into neurons. Each neuron has a transfer function that processes this input to determine the neuron’s output. The process of backpropagation involves adjusting initial weights by analyzing error rates and the influence of each input across all layers, aiming to minimize the error between the model’s output and the target data [49]. Deep learning, a subfield of machine learning, utilizes multiple layers of linear transformations for processing observational signals like two-dimensional images. In deep learning, the term “deep” often refers to a deep neural network, signifying depth in all dimensions of the network, particularly the depth of layers within a neural network. A neural network with more than three layers, including inputs, hidden layers, and outputs is considered a deep learning algorithm [22]. In the advancing field of neural computation, Recurrent Neural Networks (RNNs) stand out as a significant evolutionary step beyond traditional neural network models. Traditional models generally operate on the principle of input independence, a premise that often fails in complex data scenarios. RNNs break this paradigm by adeptly handling sequential data streams. A hallmark of RNNs is their ability to preserve an “internal state” or memory across processing units. This characteristic is particularly vital in processing time-series data, enabling these networks to not only retain but also interpret information from prior inputs in a sequence. Fundamentally, RNNs are engineered to perform iterative operations across a data series. Here, each output is influenced not just by the immediate input but is also a function of preceding computational outcomes. This iterative process facilitates a unique temporal linkage within the network, where an output at one instance is intricately linked to inputs at a subsequent instance. Such a design allows for the previous outputs to amalgamate with new inputs, creating a continuous flow of information across time steps. In essence, RNNs embody a loop-like structure within their architecture, providing them with the capability to seamlessly channel information through the neurons while processing sequential inputs. This feature renders RNNs particularly adept in applications where understanding dynamic temporal relationships in data is paramount [24].
In the realm of neural network development, traditional RNNs often face challenges in managing long-term dependencies during the training phase. This difficulty is primarily attributed to issues like escalating gradient accumulation errors and the phenomenon of vanishing gradients. To mitigate these challenges, advanced architectures such as LSTM and GRU networks have been introduced. These networks utilize multiple gates to significantly reduce error accumulation in extensive time-series analysis. Gradient accumulation, in contrast to the vanishing gradient, is a scenario where the gradient magnifies progressively, leading to a series of weight updates that can result in the divergence of gradient descent. GRUs present an advantageous alternative to LSTMs, offering similar functionality but with a more streamlined model architecture. This simplification enables GRUs to replicate LSTM-like behaviors while achieving faster convergence during training. GRUs are adept at inheriting and refining the patterns recognized by traditional RNNs, particularly in identifying dependencies in sequential data. They effectively address the limitations associated with traditional RNNs, such as increased gradient accumulation errors, vanishing gradients, prolonged processing times, and the tendency for overfitting in long sequence processing. Moreover, GRUs enhance the network’s capabilities in local optimization and generalization [50]. Furthermore, the ConvGRU represents a significant evolution over standard GRUs, especially in handling two-dimensional time series data. Unlike the nearly fully connected architecture of LSTM and GRU networks, which can lead to redundancy issues and a neglect of spatial correlations in two-dimensional data, ConvGRUs integrate temporal and spatial features more effectively. ConvGRUs evolve the GRU framework by substituting the traditional dot-product operations with convolutional processes, thereby enriching the network’s ability to process spatial information within time series data [51]. This research focuses on employing ConvGRU networks for the prediction of ionospheric brightness, highlighting their enhanced capabilities in handling complex spatiotemporal data. The subsequent sections will provide a detailed exploration of both GRU and ConvGRU networks, underscoring their structural nuances and applicative strengths.
3.1. Gated Recurrent Unit (GRU)
Within the domain of neural network architectures, GRU networks emerge as a specialized category of RNNs. Traditional RNNs, while theoretically capable of generating sequences with varied complexities, often encounter practical limitations in recalling data associated with distant past inputs. This impediment significantly undermines their efficacy in modeling long-duration time series, and introduces challenges in sequence stability. An innovative solution to this challenge is presented in the form of networks endowed with extended memory capabilities, offering a stabilizing influence. When such networks encounter difficulties in accurately interpreting recent sequences, they can leverage historical data to enhance and complete their predictive modeling. A prime example of this advanced architecture is the LSTM network. This design, conceived for improved data retention and accessibility, represents an evolution over traditional neural network models [25]. The GRU architecture is frequently regarded as an evolutionary adaptation of the LSTM framework, sharing many fundamental design principles with it. Notably, GRUs are equipped with two pivotal components—the reset gate and the update gate. These gates are instrumental in modulating the internal data flow of the network. Functioning as vector pairs, they are critical in determining the subset of data that progress to the network’s output. A key attribute of these gates is their trainable nature, enabling them to consistently maintain the integrity of data from preceding temporal steps, thus ensuring continuity across varied time intervals. The operational essence of a GRU network is encapsulated in a set of core equations, which delineate its fundamental operational mechanics. The following bellow equations serve as the backbone of the GRU’s functionality, governing its data processing and predictive capabilities [52].
In the equations mentioned above, the parameter represents the reset gate, the update gate, the current memory cell, the final memory cell, the output level for the previous hidden layer, and the cell output. In these equations, biases are represented by the parameter , matrix weights by , and input data by . In the above relationships, symbolizes the element-wise multiplication (Hadamard Product), indicates the sigmoid function, and is the activation function, which can be either the tanh function or the ReLU function, depending on the application. Based on the above equations, the update gate determines whether the equations at a given time step are based on the previous state of the cell , the cell input , or a combination of both. With this method, the network will be able to easily affect a state from several time steps ago in the subsequent time steps in a long time series or, in other words, the network can retain and use elements from the past in its memory. The additional updating capability in GRU compared to traditional recurrent neural networks has two benefits: Firstly, each cell can remember a specific feature in its input stream for subsequent time steps, and a feature considered important by the update gate can be retained without repetition. Secondly, the network creates new pathways for shortcuts that bypass several time steps. These shortcuts allow the generated error to be easily transmitted in the backpropagation phase without disappearing too quickly, thereby reducing issues related to vanishing gradients [26]. With the reset gate, the network can determine how much of the past information is not needed and should be forgotten in the current step, and how much of the information from the previous step should be used. In other words, with the reset gate at zero, the network behaves as if it is reading the initial parts of the input data series, allowing the network to forget the previously calculated state. This gate can create an intermediate state between zero and one for using elements from previous and current input data. With these two capabilities, the network can store or filter information from previous time steps and utilize long sequences [25].
3.2. Convolutional Gated Recurrent Unit (ConvGRU)
The ConvGRUs represent an evolution in neural network architecture, demonstrating enhanced learning capabilities over conventional GRU networks. These networks are adept not only at handling temporal data sequences but also at capturing and integrating the spatial characteristics of two-dimensional input data, akin to the functionality of CNNs. This dual capability makes ConvGRU networks more advanced in terms of learning efficiency, compared to traditional GRU networks. One of the distinctive features of ConvGRU networks is their departure from the nearly fully connected framework typical of LSTM and GRU networks. The traditional approach tends to accumulate excessive information, leading to inefficiencies, and often fails to account for spatial correlations among adjacent pixels in two-dimensional datasets. ConvGRU networks address this limitation by incorporating a convolutional structure, replacing the dot-product operations commonly found in GRU networks with convolutional processes. This shift enables a more nuanced handling of spatial data [53]. In ConvGRU networks, both inputs and outputs are conceptualized as three-dimensional tensors, encapsulating a rich array of spatial features within the time-series data. Building upon the inherent memory capabilities of GRU networks, ConvGRUs are proficient at maintaining the spatial dynamics of input-image sequences over extended periods. This ability facilitates the effective transmission of feature information across prolonged temporal spans, significantly enhancing the accuracy and reliability of spatiotemporal predictions. The main equations of ConvGRU used in this research are as follows [37]:
The ConvGRU equations exhibit a structural resemblance to the GRU, with a notable modification in their computational approach. The pivotal change in ConvGRUs lies in the substitution of dot-product operations, commonly used in GRUs, with convolution operations. This alteration fundamentally enhances the network’s capacity to process spatial data effectively. In ConvGRUs, the ReLU function is employed as the activation function. This choice is instrumental in introducing non-linearity into the network, enabling it to effectively handle complex input patterns. Each new input to the ConvGRU, presented in the form of a tensor, triggers the reset gate. This gate assesses whether to incorporate the network’s previous state in processing the new input. Simultaneously, the update gate determines the degree to which the new input data should influence the current state ht of the network. The input structure of ConvGRU networks is characterized by tensor dimensions. Here, H and W denote the height and width of the tensors, respectively, encapsulating the spatial dimensions of the input. Meanwhile, Ch and Ci represent the channel sizes of the state and input tensors, respectively. These dimensions are critical in defining the network’s capacity to process varying sizes and complexities of input data, as detailed in equations 18 and 19. The adoption of ConvGRU networks, as indicated by Shi et al. [37], underscores the progressive shift towards integrating convolutional processes in RNN architectures. This integration significantly broadens the scope and efficacy of neural networks in handling sophisticated spatiotemporal data sets. A critical aspect of this model is the dynamic adaptation of the loss function throughout the training phase. This continual adaptation ensures a progressive decrease in the cost-function value, thereby enhancing the efficiency and accuracy of the training process.
3.3. Loss Function
The loss function serves as a metric for assessing the adequacy of a model in terms of its capability and proficiency in predicting new values. When training a machine learning model, the objective is to identify a point where the loss function is minimized. One common approach to finding the minimum of the loss function involves utilizing derivatives and the “Gradient Descent” algorithm. A machine learning algorithm systematically refines a model’s parameters through iterative processes, guided by the evaluation of a loss function. Among the widely employed loss functions, LMSE and LMAE exhibit distinctive characteristics. The loss function of Mean Square Error (MSE), abbreviated as LMSE, calculates the average of the squared differences between the predicted and actual values. The loss function of Mean Absolute Error (MAE), abbreviated as MAE, utilizes the absolute difference between the predicted and actual values as a criterion, similar to MSE. However, it disregards the direction of this difference [54]. Therefore, in the computation of the error in MAE, only the magnitude of the difference is considered. LMSE and LMAE are defined as:
where n is the number of observations, is the actual value for observation I, and is the predicted value for observation. The LMSE is notable for expediting convergence under its diminishing gradient. However, it possesses a tendency to penalize outliers, compelling predictions towards mean values. Consequently, LMSE may exhibit limitations in capturing pronounced disturbances within authentic observations. On the other hand, LMAE constitutes a linear scoring methodology. Relative to LMSE, LMAE demonstrates enhanced resilience in the presence of outliers and excels in replicating observations situated significantly distant from mean values [55]. The Huber Loss function (Lδ), also known as Smooth Mean Absolute Error, and the Logarithm of Hyperbolic Cosine Loss function (Llog-cosh), have been employed in this study. The Lδ is less sensitive to outliers compared to LMSE. Additionally, unlike the LMAE loss function, it is differentiable, allowing for ease in its minimization. The calculation method for the Lδ is expressed by the following equation:
The Lδ provides a compromise between the LMSE and LMAE, exhibiting reduced sensitivity to outliers while maintaining differentiability for optimization purposes. When δ tends to zero, the Lδ approaches the LMSE, and, when δ approaches a large value, it converges to the LMAE. The application of the Lδ results in a scenario where, as the error decreases, its derivative decreases, simplifying the minimization of the Lδ. Consequently, this loss function diminishes the influence of outliers in calculations when outliers are present in the data. Additionally, as the error decreases, the minimization of the Lδ becomes easily attainable [56]. Another loss function particularly employed in regression is the Llog-cosh. To compute Llog-cosh, it suffices to take the logarithm of the hyperbolic cosine of the error between the predicted and actual response variables. The calculation method is detailed below:
It is known that for small values of , the function is approximately equal to , and for large values of it is approximately equal to . Consequently, this loss function remains unaffected by outliers and, furthermore, it possesses a second derivative. The presence of the second derivative is an advantage that was lacking in the Lδ. Therefore, the use of the Llog-cosh not only provides us with the advantages of the Lδ but also enables the application of methods that require second derivatives for optimization [57]. Owing to the pronounced imbalances in magnitudes and substantial data gaps observed in S4 values, common loss functions such as Lδ and Llog-cosh may prove insufficient for predicting moderate or strong levels of ionospheric scintillation. It is firmly established that each of the aforementioned loss functions possesses inherent merits and drawbacks. Consequently, we endeavor to foster innovation by amalgamating these two loss functions into a unique composite that integrates features from both. Drawing inspiration from Liu et al. [35], we will employ a custom loss function tailored to our specific needs for predicting ionospheric scintillation data with high noise levels. The formalized equation for this custom loss function is articulated as follows:
This innovative custom loss function is crafted by combining two distinct loss functions, Lδ and Llog-cosh, and introducing a Dynamic Penalty (DP) component, uniquely suited to our needs for ionospheric scintillation prediction. The dynamic penalty term signifies the maximum absolute difference between the actual and predicted values for each S4 data point. The scale factors, denoted as λ1, λ2, and λ3, govern the weighting of Lδ, Llog-cosh, and the dynamic penalty, respectively. Through empirical investigations, we ascertained that setting λ1 = 1, λ2 = 1, and λ3 = 0.1 yields optimal predictive performance on both training and validation datasets. In our modeling approach, the calculation of loss function values was conducted using the LC and Lδ methods. To ensure these loss function values correspond effectively with observational data, we incorporated wi as a weighting function in our equations. The application of wi values has been similarly utilized in other studies to enhance prediction performance [35]. These wi values, particularly applied to S4 threshold, were derived through a heuristic method obtained as:
In our study, the methodology for determining threshold values for the variable wi was primarily inspired by the approach outlined in previous research [35]. Subsequent to introducing modifications to this existing framework, we engaged in a series of empirical tests aimed at identifying optimal threshold levels. This rigorous testing led to the adoption of elevated threshold parameters for the weight values within our model’s loss function. The significance of this approach lies in its ability to weight the loss function effectively, enabling the model to dynamically adjust to observational data. This is particularly crucial in scenarios characterized by abrupt increases in observational values, thereby enhancing the model’s predictive accuracy.
3.4. ConvGRU Algorithm Architecture
The advancement in spatiotemporal forecasting methodologies, particularly through the utilization of ConvGRU-based models, necessitates the implementation of a sophisticated Encoder–Forecaster architecture with multi-input and multi-output layers. Drawing upon insights from prior studies [19,20,36,37], and considering the specific input parameters of the network, this research has led to the development of an encoder–forecaster architecture. This approach is vital for the accurate prediction of ionospheric scintillation patterns. The proposed model in this research comprises two integral components: an encoder and a forecaster. The encoder segment of the model integrates a dual-layer framework, consisting of ConvGRU and convolution layers. This design enables the effective processing of image features, facilitating a transition from higher to lower dimensional representations. Simultaneously, the ConvGRU units in this part are responsible for sequential learning of the tensor features, culminating in the generation of an intermediate matrix. The forecaster segment of the model further advances this process. Here, the intermediate matrix is initially engaged with a deconvolution layer (unsampled layer), aimed at expanding the image dimensions. Subsequently, the ConvGRU layer undertakes the task of refining the image features. This dual-layer process ensures that the trained values revert precisely to their original dimensions in alignment with the input tensor. In the schematic presented as Figure 1, the architecture of our encoder–forecaster model is depicted. This structure incorporates both down-sampling and up-sampling layers, strategically positioned between ConvGRUs. These layers are realized through the application of convolution and deconvolution operations, characterized by their stride. A notable aspect of our design is the inversion of the conventional order within the forecasting network. This modification is premised on the hypothesis that high-level states, which encapsulate a global spatiotemporal representation, can effectively inform and refine the updates occurring in lower-level states. Consequently, these lower-level states are posited to exert a reciprocal influence on the overall predictive capacity of the model [37]. This configuration aims to leverage the hierarchical nature of state interactions to enhance predictive accuracy.
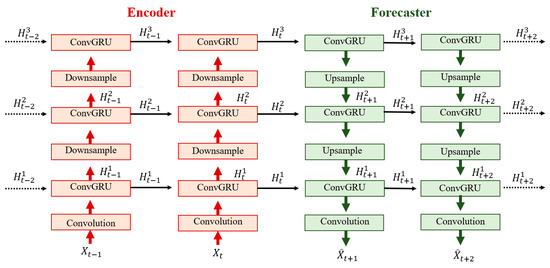
Figure 1.
The encoder–forecaster structure employed in the proposed model.
The architectural design of the algorithm is composed of four distinct components: the input module, the encoder, the decoder, and the output module. The input and output maps, specifically focusing on the S4, are identically sized at 70 units in height and 50 units in width. The input comprises a sequence of 12 successive S4 maps, which are processed through a series of three encoder blocks. The encoders employ progressively increasing filter counts of 16, 32, and 64 for each block, respectively. Within each of these blocks, a convolutional layer is paired with a ConvGRU layer, with the former facilitating down-sampling and the latter dedicated to the extraction of spatiotemporal features. This arrangement is mirrored in the forecaster section, which also features three blocks, each comprising a deconvolutional layer and a ConvGRU layer. The purpose of the forecaster is to reconstruct and project a subsequent S4 map based on the encoded data. The outputs of the ConvGRU layers in the encoder, which include hidden and cell states, serve as inputs for the corresponding layers in the forecaster. This model, as illustrated in Figure 2, presents a comprehensive network structure for effectively modeling and predicting the ionospheric scintillation parameter. This model specifically targets the prediction of ionospheric scintillation values within the South American region. The transition through convolutional, ConvGRU, and deconvolutional layers (detailed in Figure 1) results in output matrices with specific filter numbers, heights, and widths, as indicated adjacent to the respective blocks in Figure 2.
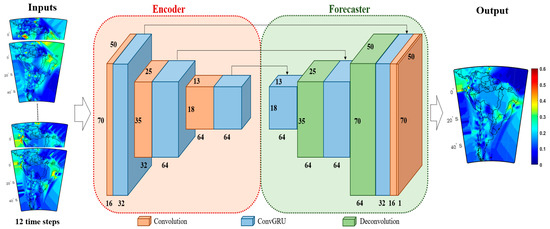
Figure 2.
The ConvGRU-based model for predicting the ionospheric scintillation of spatiotemporal series in the South American region.
In this research, the many-to-one approach has been employed to relate input values to the model’s output. Consequently, using 12 epochs of S4 observations, a future epoch is predicted, representing a near-real-time prediction. The rationale behind this decision stems from the fact that, despite the model’s capability to handle more epochs (up to six), the results obtained from preliminary experiments and an examination of projects in the field of ionospheric scintillation prediction indicate a significant decrease in prediction accuracy with an increase in observational epochs. This decrease is evident to the extent that, in some studies, such as [35], it was observed that the predicted epochs exhibit a substantially reduced prediction accuracy. Even in instances where the intensity of geomagnetic disturbances is severe, the accuracy approaches nearly zero, rendering the predictive value practically negligible. With this historical perspective and insights gained from preliminary experiments, we have determined that employing the new method allows for a nearly instantaneous prediction of ionospheric scintillation within a broad region, such as South America, which, due to its proximity to the equatorial ionization anomaly (EIA), is highly susceptible to scintillation events. In this study, utilizing the ConvGRU method and incorporating two loss functions, along with the introduction of a custom-loss function, we aim to achieve a real-time prediction for S4 values.
4. Geomagnetic Activities Affecting Ionospheric Scintillation
This study employed specific geomagnetic parameters known to influence the ionosphere, particularly those that contribute to the genesis of ionospheric irregularities. These parameters were utilized as indicators for identifying temporal intervals susceptible to ionospheric scintillation. The rationale behind this approach was grounded in the understanding that variations in geomagnetic activities exert a direct influence on the manifestation of ionospheric disturbances, including ionospheric scintillation, especially in regions of low latitude [10]. To investigate ionospheric scintillation, the research incorporated a range of geomagnetic parameters. These included the solar flux F10.7, the Disturbance Storm Time (Dst) index, the sunspot number, and the international geomagnetic index Kp. Each of these parameters played a crucial role in providing insights into the various factors influencing ionospheric conditions.
The Dst index serves as a crucial measure of magnetic activity, reflecting the intensity of the international equatorial electrojet. It is derived from horizontal geomagnetic observations collected by networks situated near the equator. A notable characteristic of the Dst index is that negative values signify a weakened magnetic field of the Earth, a phenomenon typically associated with the occurrence of geomagnetic storms. In parallel, the international geomagnetic index, Kp, functions as a key metric for assessing the Earth’s geomagnetic activity. The Kp index is particularly relevant in the context of ionospheric scintillation, offering insights into periods of geomagnetic tranquility or disturbance. For instance, Kp values below 3 are indicative of quiet geomagnetic conditions [58]. The interplay between ionospheric irregularities and scintillations is significantly influenced by geomagnetic parameters such as the Kp index and Dst trends, with the impact varying depending on the local time sector. Moreover, recent studies have identified that plasma bubble irregularities and scintillations can exhibit both enhancement and inhibition across different latitudes during identical geomagnetic storms [59]. Another vital parameter in this domain is the sunspot number, which bears a direct relation to the Sun’s magnetic field. Data suggest that the magnetic fields around sunspots are approximately a thousand times stronger than the Sun’s general magnetic field. An increase in sunspot numbers intensifies the Earth’s magnetic field, leading to the emission of substantial energy into the atmosphere in the form of solar flares [60]. Lastly, the F10.7 index is used to measure solar flux at a wavelength of 10.7 cm, serving as an indicator of solar activity. Periods of high solar activity are often correlated with intense ionospheric scintillations, whereas lower solar activity tends to coincide with reduced scintillation levels [61].
This study necessitates an analysis of ionospheric scintillation behavior across various time frames, which entails a comprehensive assessment of geomagnetic parameter values within these specific intervals. Geomagnetic activity and its temporal effects allow for the categorization of ionospheric phenomena into three distinct seasonal periods: summer solstice, winter solstice, and equinox. Specifically, January, February, November, and December are classified as winter solstice months; May, June, July, and August are classified as summer solstice months; and March, April, September, and October are classified as equinox months. In this research, one month from each season was selected for detailed modeling and forecasting analysis, as outlined in [31]. Utilizing the data presented in Table 1 and depicted in Figure 3, this study assesses the impacts of geomagnetic parameters within these defined time frames. Figure 3 illustrates fluctuations in geomagnetic indices during the specific months of January, March, and July for the years 2015 and 2020, providing a basis for discussing the intensity of geomagnetic activities driven by solar phenomena over the observation period. For this purpose, a suite of geomagnetic parameters, including the international geomagnetic index Kp, solar flux, the Dst index, and sunspot numbers was employed. These parameters are recognized as significant influencers of ionospheric scintillations. Previous studies, referenced as [30,31,62,63], have similarly utilized these geomagnetic components to investigate ionospheric scintillations. Consequently, this research integrates these components within the modeling of specified time frames to elucidate the underlying geomagnetic activities.

Table 1.
Mean and maximum values of Dst, Kp, sunspot number (SSN), and solar flux F10.7 during the months of January, March, and July for the years 2015 and 2020.

Figure 3.
Values of geomagnetic parameters affecting the occurrence of ionospheric scintillations such as: international geomagnetic index Kp, solar flux, Dst index, and sunspot number (SSN) during the months of January, March, and July in 2015 and 2020.
Data presented in Table 1 and Figure 3 detail the influence of geomagnetic parameters on ionospheric scintillation. Figure 3 provides a geographical representation of the variations in geomagnetic indices observed during the specific months of January, March, and July for the years 2015 and 2020. This graphical representation is instrumental in illustrating the temporal fluctuations in geomagnetic activity over these selected observation periods. Notably, 2015, a year marked by peak solar activity, exhibited higher values for these parameters compared to 2020. Figure 3 and Table 1 provide a comprehensive overview of the geomagnetic and solar activity patterns observed during the study period, highlighting significant fluctuations in the Kp and Dst indices, as well as the F10.7 solar flux and sunspot numbers (SSN). In 2015, the geomagnetic Kp index exhibited pronounced peaks during January and March, reaching near 8 in mid-March, the highest value observed in the study period. This peak coincided with a geomagnetic storm, significantly influencing the Dst index, which averaged −27.75 in March. Earlier in January, the Kp index approached 7, with an average value of 1.96, substantially higher than the July average of 1.71. In contrast, the year 2020 displayed a general reduction in geomagnetic disturbances. Nonetheless, March 2020 still recorded the highest average Kp value for the year, followed by January and July, mirroring the activity pattern of 2015. The Dst index trends paralleled those observed in the Kp index, with the most significant decrease in Dst also occurring in March 2015. In comparison, January 2015 recorded a lower, albeit substantial, average Dst value of −20.56. In 2020, despite an overall reduction in geomagnetic activity, March continued to exhibit the highest average Dst value of the year, with the values for July surpassing those in January.
The F10.7 index, a measure of solar flux, was higher in January 2015 (137.32) compared to March (126.29) of the same year. This pattern of solar activity persisted into 2020, with January recording a higher average F10.7 value of 72.23, compared to 70.12 in March and 69.57 in July. The variation between the highest and lowest monthly averages in 2020 was notably narrow, approximately 3 units, indicating a reduction in solar activity from 2015 levels, thereby highlighting diminished seasonal variability during periods of lower solar activity. The highest number of sunspots recorded during the observation period was in January 2015, with a peak of 153 and an average of 93.65, which exceeded counts from both March and July of the same year. In 2020, the trend in sunspot numbers significantly declined, yet the highest counts were observed in July and January, aligning with the trends in solar flux. January and March of 2015 were notable for elevated geomagnetic and solar activities, as evidenced by the Kp, Dst, SSN, and F10.7 indices. A significant geomagnetic storm in mid-March 2015 marked the highest recorded values for Dst and Kp within the observational range. However, July 2015 displayed a relative decline in geomagnetic activities, still surpassing those of similar periods in 2020. The pattern observed in 2020 was consistent, with January and March exhibiting the most activity, and July showing a subdued profile. January’s activities notably exceeded those of March, with July being the least active month, highlighting a clear pattern of geomagnetic and solar variations across the studied years.
5. Results and Discussion
This study focused on the modeling and prediction of ionospheric scintillation, utilizing observational data with standardized time steps as input and target data for a ConvGRU. The study employed a total of 121 ground-based GNSS stations, spanning a latitude range of 15°N to 55°S and a longitude range of 270° to 330°E across South America (local time approximately Universal Time—05:00), positioned within or in proximity to the EIA. The temporal dynamics of ionospheric phenomena over the course of a year can be stratified into three distinct seasonal phases: the summer solstice, the winter solstice, and the equinoxes. In this study, a systematic approach was adopted to select one representative month from each season to conduct modeling and prediction analyses of ionospheric phenomena. Additionally, this study acknowledged the influence of the eleven-year solar cycle on ionospheric conditions. Notably, the year 2015 was characterized by heightened solar activity, while 2020 experienced comparatively lower solar activity. The primary objective of this article was to predict ionospheric scintillation under varying geomagnetic conditions. For this purpose, January, March, and June were strategically chosen for 2015 and 2020 to capture contrasting solar activity phases and their respective impacts on ionospheric conditions. The year 2015, marked by peak solar activity, and 2020, characterized by a solar minimum, provide distinct contexts for assessing the predictive accuracy of our models under varied geomagnetic scenarios. This selection allowed for a comprehensive analysis of the differential effects of high versus low solar activity on ionospheric scintillation, thereby enriching our understanding of ionospheric dynamics across different solar cycles. The objective was to predict ionospheric scintillation for January, March, and July of the years 2015 and 2020. These GNSS stations recorded data at 15 and 30-s intervals. The distribution of these stations is depicted in Figure 4. To mitigate tracking errors such as multipath, a satellite elevation cutoff angle of 20 degrees was implemented. The parameters at the Ionospheric Piercing Point (IPP) altitude were set to 450 km [40]. To illustrate the spatial distribution of ionospheric scintillation over South America, two-dimensional (2D) S4 maps were generated. These maps were compiled by averaging all available IPP S4 values within a 1° latitude by 1° longitude bin, across a 5-min interval. Figure 4 illustrates an example of a raw S4 map observed on IPP, where Kriging interpolation was utilized to fill in bins devoid of S4 data, resulting in the completed S4 map also depicted in Figure 4. The dimensions of this filled S4 map are 70 in height (latitude) and 50 in width (longitude), with a grid size of 1 × 1°. This interpolation technique was applied to the raw 2D S4 maps derived from the GNSS data collected in January, March, and July of 2015 (maximum solar activity) and 2020 (minimum solar activity). Figure 4 illustrates the geographical dispersion of GNSS stations in South America, with a notable paucity in the central region of Brazil. Conversely, the peripheries and coastal areas of the continent demonstrate a heightened concentration of GNSS stations. This distribution pattern is partly attributed to the application of GNSS receiver data in monitoring oceanic events, including tsunamis. To mitigate the limitations posed by this uneven station distribution, the Kriging algorithm was implemented for effective data interpolation in this study.
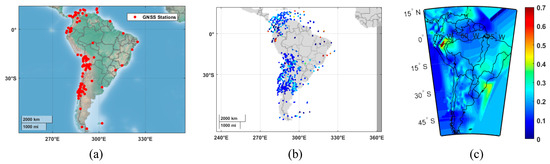
Figure 4.
(a) The geographical distribution of ground-based GNSS stations; (b) S4 values measured along IPP tracks at 12:00 UT on 15 January 2015; and (c) a filled S4 map generated through interpolation using the Kriging method.
5.1. Comparative Analysis of Ionospheric Scintillations
In the first step, we examine the state of ionospheric data and their relationship to scintillations across contrasting solar activity years 2015, a peak solar activity year, and 2020, a year of minimal solar activity. Based on the ionospheric observations from 2015 and 2020, a comprehensive analysis of ionospheric scintillations and TEC can be linked to geomagnetic influences which vary significantly over different months and years. Figure 5 presents a graphical representation of the daily average values of TEC and scintillation occurrences. Additionally, Table 2 provides detailed statistics including the monthly average values of S4, the monthly average TEC, and the monthly average percentage of scintillation occurrences. These visualizations and data summaries offer a comprehensive overview of ionospheric behavior, facilitating a deeper understanding of its variations and trends over time. During January 2015, there was a robust correlation between TEC levels and the frequency of ionospheric scintillations. Higher TEC values typically coincided with an increase in scintillation occurrences (S4 > 0.2), especially on days where TEC exceeded the monthly average by more than 10 units, with scintillation occurrences often rising above 25%. This indicates a high sensitivity of the ionosphere to electron density changes, especially near equatorial ionospheric anomalies. Lower-than-average TEC values were linked to reduced scintillation activities, suggesting that decreased electron densities could mitigate ionospheric disturbances, potentially enhancing communication stability. The intense geomagnetic activities noted in January 2015, including a high solar flux (F10.7 index at 137.32) and elevated geomagnetic indices (Kp approaching 7), likely contributed to these patterns. In March 2015, TEC fluctuations closely correlated with scintillation frequencies. Days with elevated TEC levels saw increased scintillation occurrences, frequently exceeding 20%. This month featured significant geomagnetic activity, with a Kp index near 8 and a notable Dst index downturn to −27.75, indicating strong geomagnetic disturbances. These conditions, indicative of a heightened state of geomagnetic and solar dynamism, evidently intensified the ionospheric responses, leading to higher scintillation rates. The relationship between TEC levels and scintillation occurrences in July 2015 also showed that higher TEC corresponded with more frequent scintillations, often exceeding 20% on days with elevated TEC. However, the inverse was also true: lower TEC values resulted in fewer scintillations, suggesting more stable ionospheric conditions. The geomagnetic activity in July, though less intense than earlier months, still influenced these outcomes, highlighting the complex interplay between various environmental conditions and ionospheric behavior.
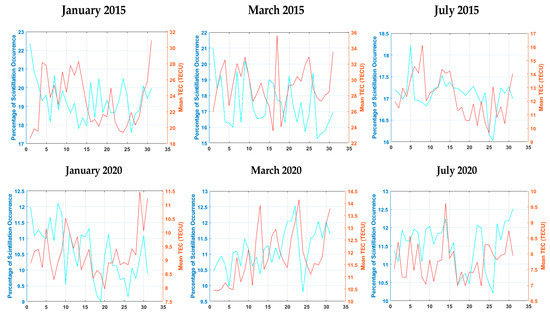
Figure 5.
Mean TEC values (red lines) and percentage of ionospheric scintillation occurrence (S4 > 0.2) (blue lines) derived from GNSS ground-based measurements across South America for January, March, and July in 2015 and 2020.
Table 2.
Summary of monthly ionospheric parameter values and model accuracy metrics for South America, presenting the average monthly values of ionospheric parameters, including VTEC, S4, and the percentage occurrence of ionospheric scintillation (S4 > 0.2). Also included are the accuracy metrics for ionospheric scintillation modeling and prediction—Mean Error (ME), Root Mean Square Error (RMSE), and Pearson Correlation Coefficient (CC)—utilizing ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ methods. The data are compiled for January, March, and July in 2015 and 2020.
Fast forward to January 2020, the correlation between TEC and scintillations remained evident but with less intensity compared to 2015. The Kp index showed a decrease, aligning with generally reduced geomagnetic disturbances throughout the year. Days with high TEC continued to show increased scintillation occurrences, emphasizing ongoing sensitivity to electron density changes, albeit under reduced solar and geomagnetic influences (F10.7 at 72.23). March 2020 saw a clear relationship between increased TEC and higher scintillation rates, particularly on days when TEC values were significantly above average. Despite a generally quieter geomagnetic environment than 2015, the effects of elevated electron densities on ionospheric disturbances remained pronounced, indicating the enduring impact of geomagnetic conditions on ionospheric stability. In July 2020, variability in the relationship between TEC levels and scintillation occurrences was noted, with high TEC days often correlating with increased scintillations. This period, characterized by lower solar activity and milder geomagnetic conditions, still demonstrated the significant influence of elevated electron densities on the ionosphere, underscoring the complex dynamics shaped by various environmental factors. The comparative analysis from January, March, and July across both 2015 and 2020 highlights significant seasonal and annual variations in the interplay between TEC and ionospheric scintillations. These findings underscore the complex dynamics of the ionosphere, influenced by electron content and modulated by varying levels of geomagnetic, solar, and atmospheric conditions. Each period demonstrates unique characteristics in how geomagnetic parameters influence ionospheric conditions, offering insights into the timing and intensity of disturbances impacting satellite communications.
5.2. Quantitative Analysis of the ConvGRU Models Efficacy
In this research, the ConvGRU methodology was employed, incorporating three distinct loss functions: ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ. The objective of this study was to facilitate real-time predictions of S4 values using these techniques. The processed S4 maps were divided into three distinct sets: training (70% of total data, covering the 1st to 22nd of January/March/July), validation (20% of total data, covering the 23rd to 28th of January/March/July), and testing (10% of total data, covering the 29th to 31st of January/March/July). In the experimental setup, the system utilized a NVIDIA GeForce RTX 3090 GPU, integrated with a CUDA 11.3 parallel processing architecture. The processing unit was complemented by an Intel Core i7-12700KF CPU and a substantial 128 GB RAM capacity. For optimization in this research, the Adam algorithm, as outlined by Kingma and Ba [64], was selected. The activation function employed was the Leaky ReLU, with a specified leakiness parameter of 0.1, following the methodology described by Xu et al. [65]. Additionally, the learning rate and batch size for the experiments were configured at 0.00003 and 14, respectively, in accordance with the specifications in [35]. The training dataset was used to calibrate the model by updating its parameters via the gradient descent method. The validation set aimed to prevent overfitting to the training data, while the testing set was utilized to evaluate the trained model’s efficacy in generalizing to new and previously unseen data, as outlined by Goodfellow et al. [66]. The initial phase of this part involved a comparative analysis of S4 modeling outputs generated by the ConvGRU method over a specific modeling interval against observed data collected during the same period. This research employed three statistical metrics to evaluate the modeling and predictive efficacy of the proposed machine learning approach: Mean Error (ME), Root Mean Square Error (RMSE), and Pearson Correlation Coefficient (CC). The equations for calculating these metrics are provided below:
The aforementioned equations incorporate the terms , which represent the covariance between the variables and . Additionally, the parameters and denote the standard deviations of and , respectively. Table 2 presents the parameter values for S4 during the modeling phases (training and validation) and the prediction (testing) interval. Additionally, this table includes the percentage occurrence of ionospheric flashes within the observation period. This metric is calculated based on the frequency of observations where S4 values exceed 0.2, signaling the presence of ionospheric flashes during that period. Analysis of the data from Table 2 reveals that the year 2015, a period of maximum solar activity, exhibited a higher percentage of ionospheric radiance compared to 2020, a year of minimal solar activity.
In this research, the predictive accuracy of three advanced Convolutional Gated Recurrent Unit (ConvGRU) models—ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ—was evaluated for modeling ionospheric scintillations in South America during January, March, and July of 2015 and 2020. The models were trained and validated using a substantial portion of the data, specifically encompassing the 1st to the 28th of each month. This period, accounting for 90% of the total data available, included a training set comprising 70% of the total dataset (1st to 22nd) and a validation set forming 20% (23rd to 28th). Data from the subsequent testing phase (the last three days of each month) were excluded from the modeling process to ensure the integrity and independence of the evaluation. The ConvGRU-LC method exhibited commendable consistency throughout periods of heightened ionospheric activity. During January and March of 2015, the method achieved CC of 0.91, demonstrating a strong linear relationship despite increased disturbances in the ionosphere. In July 2015, a slight improvement was noted with a CC of 0.92, suggesting marginally better alignment with observed data, potentially influenced by seasonal variations in ionospheric conditions. However, the RMSE and ME for March were slightly higher (RMSE = 0.009, ME = 0.017), which may be attributed to the complex ionospheric dynamics that are typically exacerbated during the equinox, affecting geomagnetic activity. In contrast, the year 2020 showed significant improvements in model accuracy, achieving a peak CC of 0.94 in January, along with the lowest recorded RMSE (0.006) and ME (0.011). These metrics indicate enhanced predictability during periods of minimal solar activity, which offer more stable conditions favorable to model performance. The ConvGRU-Llog-cosh method maintained consistent performance throughout 2015, with a CC of 0.89 for all months studied. This consistency suggests a robust model design, albeit with a margin of error possibly influenced by external disturbances not fully captured by the model’s architecture. The RMSE and ME values remained relatively steady around 0.013 and 0.023, respectively, indicating a moderate level of prediction error that showed little fluctuation over the months. Notable improvement was observed in 2020, with a CC increase to 0.91 in January. The decrease in RMSE and ME during this year reflects the method’s enhanced capability in managing fewer disturbances, aligning with the general trend of improved performance under quieter geomagnetic conditions. Conversely, the ConvGRU-Lδ method displayed the lowest performance metrics among the three models. In January 2015, this method recorded the highest RMSE of 0.026, struggling significantly under conditions of high solar activity. The elevated error rates highlight difficulties in the model’s ability to adapt to rapid changes in ionospheric parameters, which are more pronounced during periods of intense solar activity. Although there were improvements in 2020, they were not as marked as those observed with the other methods, suggesting that, while the ConvGRU-Lδ method may perform better under quieter conditions, it still lacks the robustness needed to match the accuracy levels of ConvGRU-LC and ConvGRU-Llog-cosh.
The overall analysis indicates that the ConvGRU-LC method outperforms the other techniques, particularly in high solar activity conditions, by maintaining higher CC values and lower error metrics. In contrast, the ConvGRU-Lδ method, despite showing some potential, requires further optimization to improve its robustness against high-disturbance conditions. The ConvGRU-Llog-cosh method occupies a middle ground, offering consistent performance that, while slightly less optimal than that of the ConvGRU-LC method, remains dependable. The higher occurrences of ionospheric scintillation in 2015 correlate with increased RMSE and ME values across all models, particularly in March. This trend underscores the challenges of modeling under intense ionospheric fluctuations, and highlights the superior adaptability of the ConvGRU-LC method during such periods. The extended analysis emphasizes that the choice of modeling technique significantly impacts the accuracy of ionospheric predictions, especially under varying solar activities. The superior performance of the ConvGRU-LC method across both peaks and troughs of solar activity underscores its potential as a reliable tool for ionospheric forecasting.
The efficacy of three distinct ConvGRU models—ConvGRU-LC, ConvGRU-Lδ, and ConvGRU-Llog-cosh—was critically analyzed to assess their predictive accuracies in modeling ionospheric scintillations over the South American region during January, March, and July for the years 2015 and 2020. This analysis specifically focused on the test data set covering the last three days of each month (29th to 31st), which accounted for 10% of the total dataset, providing a concise snapshot of model performance during varied ionospheric conditions. The ConvGRU-LC model demonstrated substantial consistency and robustness throughout the testing periods, particularly during times of heightened ionospheric activity. In January and March of 2015, the model attained a CC of 0.80, indicating a strong linear relationship, despite the increased disturbances within the ionosphere. A slight improvement was observed in July of the same year, with a CC of 0.81, suggesting marginally better alignment with observed data, which may be influenced by seasonal variations in ionospheric conditions. Despite these strong performances, the RMSE and ME for March 2015 were relatively high at 0.024 and 0.04, respectively. This increase could be attributed to the complex ionospheric dynamics typically exacerbated during the equinox, impacting geomagnetic activity. Conversely, the year 2020 showcased significant advancements in model accuracy, achieving a peak CC of 0.83 in January, alongside the lowest recorded RMSE (0.013) and ME (0.02). These metrics indicate an enhanced predictability during periods of minimal solar activity, which offers more stable conditions favorable to model performance. The ConvGRU-Lδ model exhibited lower performance metrics compared to the ConvGRU-LC model, particularly under conditions of high solar activity. In July 2015, this model recorded a CC of 0.78 and the highest RMSE of 0.03 among the models, highlighting difficulties in adapting to rapid changes in ionospheric parameters. However, by 2020, there were notable improvements in the model’s performance, with January showing a CC increase to 0.81 and an RMSE reduction to 0.022, reflecting its better handling of quieter geomagnetic conditions.
Maintaining consistent performance throughout the observed periods, the ConvGRU-Llog-cosh method showed resilience across 2015, with CC values consistently around 0.75 for all months, suggesting a robust model design capable of managing external disturbances efficiently. This consistency extended into 2020, with notable improvements in January where the CC increased to 0.8 and the RMSE and ME decreased to 0.02 and 0.04, respectively. These improvements underscore the method’s enhanced capability in managing fewer disturbances, aligning with the general trend of improved performance under quieter geomagnetic conditions. Throughout the analysis, it was evident that the ConvGRU-LC model outperformed the other techniques, particularly in conditions of high solar activity, by maintaining higher CC values and lower error metrics. In contrast, the ConvGRU-Lδ method, despite showing potential, requires further optimization to enhance its robustness against high-disturbance conditions. The ConvGRU-Llog-cosh method, occupying a middle ground, offered consistent performance that, while slightly less optimal than that of the ConvGRU-LC, proved dependable across varied conditions. The higher occurrences of ionospheric scintillation in 2015 correlated with increased RMSE and ME values across all models, particularly noticeable in March. This trend underscores the challenges of modeling under intense ionospheric fluctuations and highlights the superior adaptability of the ConvGRU-LC method during such periods. The extended analysis emphasizes that the choice of modeling technique significantly impacts the accuracy of ionospheric predictions, especially under varying solar activities. The superior performance of the ConvGRU-LC method across both peaks and troughs of solar activity underscores its potential as a reliable tool for ionospheric forecasting.
5.3. Comparative and Qualitative Analysis
In this section of our study, we conducted a detailed visual analysis of the predicted S4 values over a three-day interval at the end of each month, specifically targeting the 29th, 30th, and 31st. The predictions were generated using three distinct ConvGRU models: ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ. The outcomes of these predictions for the specified days are illustrated in Figure 6, Figure 7 and Figure 8. For a focused analysis, we selected key diurnal moments—sunrise, noon, and sunset—known for manifesting significant ionospheric variability. These time periods were chosen to capture the dynamic nature of ionospheric changes over the course of a day and night. The geographical focus was set at a median longitude of 300°E and a latitude of −20°S, positioning our study within the western South American region, near Ecuador and Peru, which typically aligns with the UTC-5 time zone. The graphical representations in Figure 6, Figure 7 and Figure 8 display both observed and model-predicted S4 values at the designated times of sunrise, noon, and sunset. These visualizations clearly illustrate the disparity in ionospheric behavior between 2015 and 2020. This variation can primarily be attributed to the differing levels of geomagnetic activity observed in these two years, with each model reflecting unique capabilities in capturing these differences. The visual comparisons not only underscore the temporal variations in ionospheric disturbances but also highlight the predictive strengths and weaknesses of each ConvGRU model under varying geomagnetic conditions.
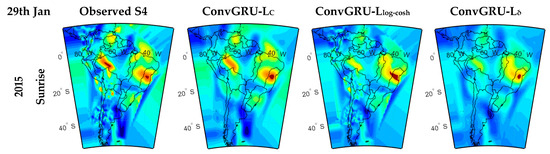
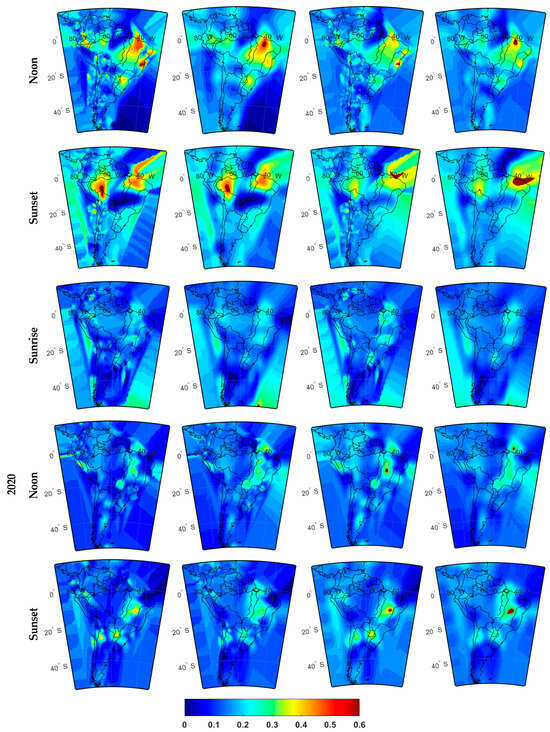
Figure 6.
Observed and predicted S4 maps for South America on 29th January in 2015 and 2020 at three time points. The figure displays maps at sunrise (05:45 LT–10:45 UT), solar noon (12:15 LT–17:15 UT), and sunset (18:40 LT–23:40 UT). The first column illustrates the observed S4 values, while the subsequent columns show predictions from the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models, respectively.
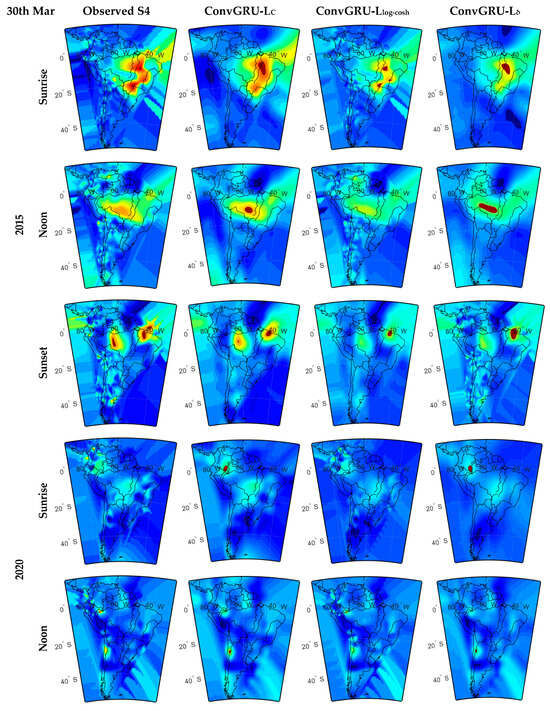
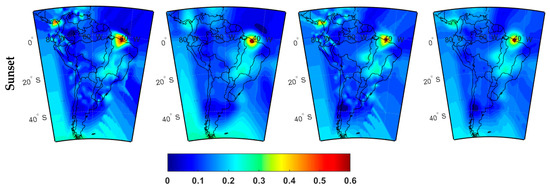
Figure 7.
Observed and predicted S4 maps for South America on 30th March in 2015 and 2020 at three time points. The figure displays maps at sunrise (06:10 LT–11:10 UT), solar noon (12:05 LT–17:05 UT), and sunset (18:00 LT–23:00 UT). The first column illustrates the observed S4 values, while the subsequent columns show predictions from the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models, respectively.
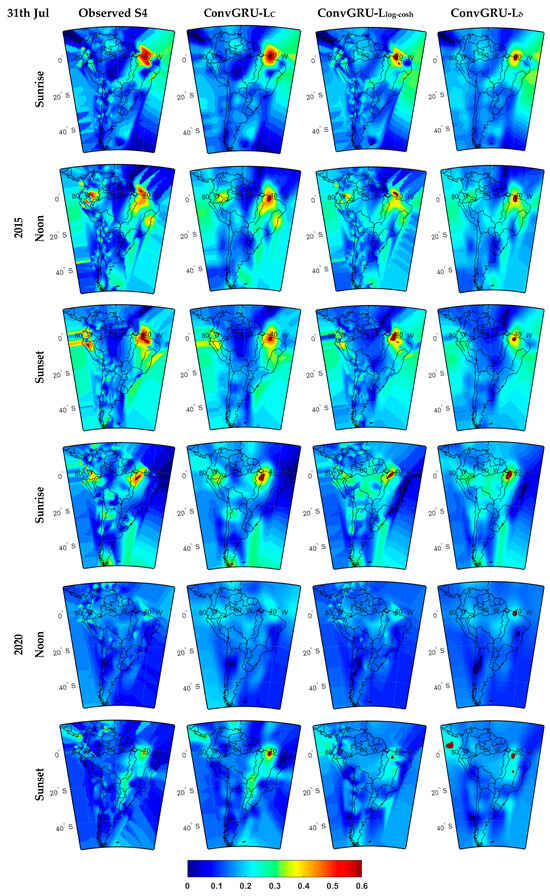
Figure 8.
Observed and predicted S4 maps for South America on 31st July in 2015 and 2020 at three time points. The figure displays maps at sunrise (06:30 LT–11:30 UT), solar noon (12:05 LT–17:05 UT), and sunset (17:40 LT–22:40 UT). The first column illustrates the observed S4 values, while the subsequent columns show predictions from the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models, respectively.
The observed S4 map on 29 January 2015, at sunrise (05:45 LT–10:45 UT) reveals pronounced ionospheric activity along the equatorial anomaly from approximately 10°S to 0°, with high-intensity zones around 300°E longitude, as shown in Figure 6. This time typically experiences enhanced disturbances due to increased solar radiation at dawn. The ConvGRU-LC model accurately replicated the intensity and spatial distribution of scintillation zones during this period. Although some areas showed smoothed gradients, this model robustly captured the ionospheric dynamics at sunrise. In contrast, the ConvGRU-Llog-cosh model captured the broader scintillation activity but tended to dilute peak intensities, potentially overgeneralizing ionospheric conditions. The ConvGRU-Lδ model significantly diverged from observed patterns, underestimating scintillation intensity and misrepresenting high-activity regions, thus displaying lower sensitivity to rapid changes. By noon (12:15 LT–17:15 UT), the overall scintillation intensity decreased, reflecting the typical diurnal reduction in solar radiation effects. Notable activity persisted along the equatorial regions, though less intense and more dispersed than at sunrise. The ConvGRU-LC model adeptly adjusted to this shift, accurately maintaining the intensity and geographic specificity. However, the ConvGRU-Llog-cosh model, while capturing the overall reduction in activity, lacked the granularity to precisely localize the highest scintillation zones. Conversely, the ConvGRU-Lδ model’s outputs were subdued and poorly aligned with observed spatial patterns, highlighting its ongoing challenges in accuracy. The sunset map (18:40 LT–23:40 UT) continued to show scintillation activities along the equatorial anomaly. While the overall intensity was lower than the sunrise peak, localized enhancements indicated lingering effects of solar radiation. The ConvGRU-LC model again excelled, closely mirroring observed conditions and effectively capturing the nuanced spatial dynamics of the ionosphere. The ConvGRU-Llog-cosh model, recognizing the general decline in activity, presented a broader distribution of scintillation than observed patterns, which could detract from its utility in precise operational contexts. The ConvGRU-Lδ model showed considerable inaccuracies, notably underestimating both scintillation intensity and localization capabilities.
The 2020 sunrise map displays high activity along the equatorial anomaly, similar to 2015 but with reduced intensity, likely due to the solar minimum’s diminished impact on the ionosphere (as detailed in Figure 6). The ConvGRU-LC model excelled at accurately replicating these patterns, capturing both the intensity and spatial distribution effectively, despite minor discrepancies in gradient smoothness. In contrast, the ConvGRU-Llog-cosh model offered a generalized depiction, diluting peak intensities and lacking the detail needed for precise forecasting. The ConvGRU-Lδ model significantly diverged, underestimating scintillation intensity and poorly localizing high-activity areas, demonstrating limited sensitivity to rapid changes at sunrise. By noon, activity decreased further, with scintillation primarily confined to the equatorial regions, reflecting a more stable ionospheric state due to decreased solar activity. The ConvGRU-LC model aligned closely with observed data, showing nuanced modeling capabilities by accurately reflecting both the reduced intensity and geographic distribution. In contrast, the ConvGRU-Llog-cosh model suggested an overestimation of disturbances with its broader dispersion, while the ConvGRU-Lδ model displayed a significant reduction in activity and failed to accurately depict high-activity zones, indicating an underestimation of ionospheric disturbances. At sunset, ionospheric activity in 2020 was significantly lower than in 2015, with only subtle enhancements visible along the equatorial anomaly. The ConvGRU-LC model replicated observed patterns with high accuracy, effectively resolving the equatorial anomaly and adjacent areas, albeit with slight overestimations in some regions. However, the ConvGRU-Llog-cosh model produced a more generalized spread of activity, potentially compromising its utility for precise applications by smoothing over intricate details. The ConvGRU-Lδ model notably underestimated the scintillation activity, especially failing to capture critical intensity peaks necessary for accurate sunset predictions.
The observed S4 map at sunrise on 30 March 2015, reveals substantial scintillation activity, especially near the equatorial ionization anomaly. This area exhibits the highest electrical conductivity and ionization due to its proximity to the geomagnetic equator, which is why it consistently shows intense scintillation. This heightened activity can be attributed to the increased ionospheric excitations due to the first solar radiation of the day during a year of high solar activity. The ConvGRU-LC model accurately replicated both the spatial distribution and intensity of these disturbances, capturing the core high-intensity areas effectively, although with slight deviations in peripheral zones, suggesting minor underestimations. In contrast, the ConvGRU-Llog-cosh model generalized the ionospheric activity, smoothing peak intensities and broadening the impact area, resulting in a less precise depiction of localized high-intensity zones. The ConvGRU-Lδ model underperformed, underestimating the intensity and failing to capture the broader scintillation context, which muted the color intensities and reduced spatial accuracy. At solar noon, the scintillation activity decreased from sunrise but still covered significant areas, reflecting the stabilizing effect of sustained solar radiation. The peak activities shifted slightly northward, aligning more closely with the geomagnetic equator. The ConvGRU-LC model mirrored this pattern closely, capturing the peak activity with high fidelity but slightly overestimating the spread of lower intensity scintillation towards the east. The ConvGRU-Llog-cosh model, while maintaining the general location of peak activity, diffused the high-intensity areas, resulting in a less defined representation of the equatorial anomaly. Conversely, the ConvGRU-Lδ model significantly diverged from the observed patterns, underestimating scintillation intensities and failing to depict the detailed spatial extent of these disturbances. Activity at sunset was enhanced again, although not as intense as at sunrise. This resurgence is typical as the ionosphere undergoes rapid changes in response to diminishing solar radiation, reactivating the equatorial anomaly. The ConvGRU-LC model provided an accurate representation of these conditions, closely aligning with the observed data, albeit with slightly smoothed intensity transitions. However, the ConvGRU-Llog-cosh model broadened the impact zone and diluted the observed peak intensities, leading to a generalized depiction. The ConvGRU-Lδ model displayed considerable inaccuracies, with a significant underestimation of both the intensity and the spatial distribution of scintillation, indicating its limited sensitivity to the dynamic sunset conditions.
During 2015, ionospheric scintillation was most intense and widespread at sunrise, diminishing towards noon and slightly increasing again by sunset. In 2020, the overall intensity and spread were reduced across all times, correlating with lower solar activity. Compared to 2015, the sunrise map shows reduced scintillation activity, illustrating the lower ionospheric disturbances typical of a solar minimum. The same regions were affected, but the intensity and spread of scintillation were markedly lower. The ConvGRU-LC model closely approximates the observed data, capturing the primary scintillation hotspots with remarkable accuracy, though it slightly overestimates peripheral activities. In contrast, the ConvGRU-Llog-cosh model generalizes the peak intensities, spreading the activity over a wider area with less distinction, which could compromise its utility for precise monitoring. The ConvGRU-Lδ model significantly underestimates both the intensity and spread of activity, displaying a constrained area of influence and muted color intensities. The noon map indicates further reduced activity compared to 2015. The pattern remains over the equatorial region but is less intense and more confined, reflecting the subdued solar activity. The ConvGRU-LC model accurately reflects these observations, depicting the intense activity with high fidelity and capturing subtle nuances in scintillation spread. However, it slightly underrepresents scintillation in the periphery compared to the observed data. The ConvGRU-Llog-cosh model, while identifying the general activity region correctly, fails to delineate the sharp transitions between high and low scintillation zones, presenting a blurred view of the equatorial anomaly. The ConvGRU-Lδ model markedly diverges from the observed conditions, inadequately representing both the intensity and breadth of the ionospheric disturbances. The sunset map shows even lower levels of scintillation than at noon, with very localized areas of disturbance. This decrease aligns with the expected behaviors during a solar minimum, with minimal disruptions as solar radiation wanes. The ConvGRU-LC model replicates these observations precisely, accurately depicting the intense scintillation zones and their gradations. The ConvGRU-Llog-cosh model exhibits a broader dispersion of scintillation, diluting the intensity of peak zones and offering a less localized depiction. Conversely, the ConvGRU-Lδ model significantly underestimates the ionospheric disturbances, with a notable reduction in both intensity and extent. Across all observation times, the ConvGRU-LC model consistently provides the most accurate simulations of ionospheric conditions, proving indispensable for detailed monitoring and forecasting. The ConvGRU-Llog-cosh model, while suitable for broad-trend analyses, lacks the granularity required for precise detection. Conversely, the ConvGRU-Lδ model demonstrates considerable deficiencies, particularly in accurately modeling the complex ionospheric behaviors observed during high-activity periods.
The observed S4 map for 31 July 2015 at sunrise shows pronounced ionospheric activity concentrated around the equatorial anomaly, characterized by intense scintillation and vibrant color transitions. This phenomenon is primarily attributed to increased solar radiation at sunrise, which significantly impacts ionospheric dynamics. The ConvGRU-LC model demonstrates exceptional predictive accuracy, capturing both the intensity and spatial distribution of the central hotspot, though it slightly overestimates the affected area. Despite this minor discrepancy, the model exhibits strong correspondence with the observed data, highlighting its robust predictive capabilities. Conversely, the ConvGRU-Llog-cosh model provides a more generalized depiction, capturing the primary activity region but with diffused peak intensities and an expanded affected area. This results in a less precise representation of localized high-intensity zones, potentially leading to overestimations of ionospheric disturbances. The ConvGRU-Lδ model significantly diverges from the observed patterns, underestimating scintillation intensity and inaccurately representing its spatial distribution, with a narrower focus and muted intensity. At solar noon, there was a significant spread of ionospheric activity, with intensity still concentrated around the equatorial anomaly but extending further into the mid-latitudes. This expansion aligned with peak solar irradiation at noon, exacerbating ionospheric responses. The ConvGRU-LC model closely replicates the observed features, accurately capturing the intensity and extent of ionospheric activity, albeit with a slight overestimation to the south. This model effectively models the spatial dynamics and preserves the structural details of ionospheric peaks, making it highly suitable for operational scenarios requiring precision. The ConvGRU-Llog-cosh model, while accurately identifying the main region of activity, smooths out sharp intensity transitions, creating a generalized scintillation pattern that lacks the specificity of the observed map. This model is useful for broader analyses but falls short in detailed, localized forecasting. The ConvGRU-Lδ prediction shows substantial deviation, underestimating both the intensity and spatial extent of scintillation, particularly failing to capture the northern expansion, resulting in a muted and less vibrant representation. The sunset map reveals significant ionospheric activity along the equatorial region, with a distinct scintillation hotspot near 10°S longitude. The scintillation is highly concentrated near the equator but with an increased area and intensity compared to sunrise. This period is known for heightened scintillation due to dynamic conditions at sunset, which enhance electron density fluctuations. This reflects the typical increase in ionospheric irregularities post-sunset, influenced by rapid changes in ionospheric plasma as it transitions from daylight to night conditions. The ConvGRU-LC prediction is remarkably accurate, mirroring the observed conditions in terms of both intensity and location. Although it slightly overestimates less intense scintillation areas, it remains effective at simulating sunset ionospheric dynamics. The ConvGRU-Llog-cosh output extends the influence zone beyond the observed areas, generalizing ionospheric activity and diluting peak intensities, resulting in a less localized and precise depiction. The ConvGRU-Lδ model, with significant underestimations and poor localization of activity, shows the largest deviation from the observed conditions, indicating its limited utility in operational applications during significant ionospheric disturbances. Overall, the ConvGRU-LC model stands out for its fidelity in reproducing observed ionospheric conditions, while the other models exhibit varying degrees of effectiveness. The most intense ionospheric activity consistently occurs at sunset, possibly due to the compounded effects of solar heating throughout the day and the abrupt shift to night conditions.
The variability between 2015 and 2020 highlights the impact of the solar cycle on ionospheric conditions, with 2015 showing more intense and widespread disturbances compared to 2020. The 2020 sunrise map, for instance, displays a less intense and more diffuse scintillation pattern, indicating a subdued response due to the solar minimum. The observed S4 map on July 31, 2020, at sunrise, shows ionospheric irregularities around the equatorial anomaly, with high scintillation levels concentrated in the EIA region. This increased activity correlates with the morning rise in solar radiation, which amplified ionospheric disturbances. The ConvGRU-LC model adeptly approximates the observed data, replicating the intensity and spatial distribution of scintillation zones, though it slightly overestimates the impact area. In contrast, the ConvGRU-Llog-cosh model offers a broader depiction, diluting peak intensities and enlarging the affected area, which may compromise precision. The ConvGRU-Lδ model notably underestimates the intensity and breadth of disturbances, focusing on a narrower region and displaying markedly lower scintillation intensity, suggesting limited sensitivity to dynamic changes at sunrise. At noon, the scintillation pattern is milder with less spatial extent. The core areas of activity are less intense and more contained, reflecting reduced solar influences characteristic of a solar minimum. The ConvGRU-LC model precisely mirrors the observed high-intensity zones, though it modestly extends the disturbance area to the south, demonstrating a high capacity for detailed simulation of ionospheric dynamics suitable for precise forecasting. However, the ConvGRU-Llog-cosh model generalizes ionospheric activity, extending intensity over a wider area and smoothing out peaks, which might limit its utility for precise forecasting. The ConvGRU-Lδ model significantly deviates, underestimating both the intensity and extent of scintillation and failing to depict the broader context effectively, which may hinder its application in scenarios requiring detailed monitoring. Similar to sunrise and noon, the sunset scintillation in 2020 was less pronounced than in 2015. The intensity and spread were reduced, highlighting the overall decrease in ionospheric activity during the solar minimum. The ConvGRU-LC model closely aligns with observed data, accurately capturing primary scintillation zones and gradients, albeit with slight overextensions in less intense areas. This model’s high fidelity makes it ideal for applications necessitating precise monitoring. Conversely, the ConvGRU-Llog-cosh model diffuses scintillation intensity, spreading activity more broadly and less intensely, which may not suffice for specific needs. The ConvGRU-Lδ model significantly underestimates both the intensity and distribution of scintillation, presenting a diluted view of ionospheric dynamics that could be less effective for detailed monitoring. Overall, the ConvGRU-LC model stands out for its accurate and detailed replication of observed ionospheric conditions, proving highly effective for operational monitoring and prediction. The ConvGRU-Llog-cosh model, while useful for broader assessments, lacks the precision necessary for detailed studies. In contrast, the ConvGRU-Lδ model underperforms in capturing the complexity of ionospheric dynamics, especially during periods of intense solar activity.
6. Evaluation of Results
In the evaluation section of this scientific article, we examine the performance of ConvGRU models (ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ) in predicting ionospheric scintillation, treating it as a classification problem. To assess the models’ capabilities, we categorize ionospheric disturbances into four distinct levels based on the S4 index values, which are indicative of scintillation intensity. These levels are defined as: no scintillation (S4 < 0.2), weak scintillation (0.2 ≤ S4 < 0.4), moderate scintillation (0.4 ≤ S4 < 0.6), and strong scintillation (S4 ≥ 0.6). The thresholds for classification are set at S4 values of 0.2, 0.4, and 0.6, assigning a label ‘1’ to records exceeding these thresholds and ‘0’ otherwise. We employ several statistical parameters to evaluate the predictive accuracy and reliability of these models, including the False Alarm Rate (FAR), Critical Success Index (CSI), Probability of Detection (POD), and True Skill Score (TSS). The FAR measures the proportion of false positives relative to the total number of actual negative cases. It is calculated as the number of false positives divided by the sum of false positives and true negatives. The CSI, also known as the Threat Score, evaluates the accuracy of predictions by considering both hits (true positives) and misses (false negatives), as well as false alarms (false positives). The POD assesses the model’s ability to correctly identify actual positives, calculated as the ratio of true positives to the sum of true positives and false negatives. The TSS compares the hit rate and the false alarm rate to gauge the model’s ability to discriminate between positive and negative classes beyond random chance. The FAR, CSI, POD, and TSS are calculated in the following manner:
where TP, TN, FP, and FN represent the numbers of true positives, true negatives, false positives, and false negatives, respectively. A lower FAR indicates fewer incorrect predictions of scintillation when it does not occur, signifying higher model precision. The CSI index does not take true negatives into account, focusing solely on the cases predicted as events. High POD values indicate the effective detection of scintillation events, critical for ensuring reliability in practical applications. The TSS ranges from −1 to 1, where 1 signifies perfect skill, 0 no skill (equivalent to random chance), and −1 indicates total discordance [67,68,69,70]. Table 3 provides a detailed comparative analysis of the performance metrics for the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models applied to the test dataset. Table 3 includes skill scores for January, March, and July across the years 2015 and 2020, covering various conditions of ionospheric irregularities. This systematic evaluation aids the understanding of the effectiveness of each model under different temporal and environmental conditions, highlighting their predictive accuracies during periods of ionospheric scintillation.
Table 3.
Prediction performance of the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models using statistical parameters such as the False Alarm Rate (FAR), Critical Success Index (CSI), Probability of Detection (POD), and True Skill Score (TSS) over South America during January and March of 2015 and 2020.
In this detailed analysis, we delve into the performance metrics of the ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ models applied to predict ionospheric scintillation over South America during January and March of 2015 and 2020. The assessment utilizes statistical parameters such as the False Alarm Rate (FAR), Critical Success Index (CSI), Probability of Detection (POD), and True Skill Score (TSS) to comprehensively evaluate the models’ accuracy across these periods characterized by differing solar activity levels. The ConvGRU-LC model exhibited notable improvements in all metrics from 2015 to 2020. The FAR decreased substantially, from 0.34 to 0.19 in January and from 0.32 to 0.21 in March, indicating fewer false positives and greater predictive conservatism under lower solar activity. The CSI increased from 0.43 to 0.64 in January, and from 0.45 to 0.66 in March, demonstrating a higher accuracy in correctly predicting events relative to the total events forecasted and observed. Similarly, the POD improved from 0.59 to 0.80 in January, and from 0.61 to 0.81 in March, reflecting enhanced sensitivity in detecting true scintillation events. The TSS also rose from 0.53 to 0.72 in January, and from 0.55 to 0.73 in March, underscoring significant gains in the model’s discriminative ability. For the ConvGRU-Llog-cosh model, similar trends were observed. The FAR reductions—from 0.36 to 0.20 in January, and from 0.34 to 0.22 in March—suggest an improvement in prediction specificity. The CSI improvements were notable, increasing from 0.41 to 0.62 in January and from 0.44 to 0.64 in March, indicating more effective event prediction. The POD showed robust gains, increasing from 0.56 to 0.78 in January, and from 0.59 to 0.79 in March, signifying a higher likelihood of detecting actual scintillations. The TSS improved from 0.51 to 0.70 in January, and from 0.53 to 0.71 in March, highlighting better discrimination between events and non-events. The ConvGRU-Lδ model also showed improvements across all metrics, although the changes were slightly less pronounced compared to the other two models. The FAR decreased from 0.37 to 0.21 in January, and from 0.35 to 0.23 in March. The CSI rose from 0.40 to 0.61 in January, and from 0.42 to 0.63 in March, reflecting enhanced overall effectiveness. The POD increased from 0.55 to 0.76 in January, and from 0.57 to 0.77 in March, indicating greater detection capabilities. The TSS advanced from 0.49 to 0.69 in January, and from 0.51 to 0.70 in March, showing improved model skill.
The overall analysis of ionospheric scintillation predictions using the ConvGRU model configurations across varied solar activity conditions for the years 2015 (a solar maximum) and 2020 (a solar minimum) provides a deeper understanding of how solar activity influences prediction capabilities in ionospheric scintillation. The FAR index demonstrated a clear decrease from 2015 to 2020 in all models. This reduction was particularly notable during months of lower ionospheric activity, reflecting the models’ improved accuracy in avoiding false alarms as the solar cycle waned. The lower FAR in 2020 across all models suggests a heightened ability to discern non-events, which is crucial for reducing operational inefficiencies in real-world applications. The CSI improvements from 2015 to 2020 underscore a refinement in the models’ overall predictive accuracy. The year-on-year increase in CSI during the months of January and March, despite their atmospheric variability, indicates an enhanced alignment of the models with the actual ionospheric behavior, likely attributed to improved model training and parameter optimization. The ascending POD values from 2015 to 2020, particularly for ConvGRU-LC, highlight its robust detection capabilities. Improved detection rates are critical for ensuring that significant scintillation events are captured and accounted for in operational settings, particularly in navigation and communication systems reliant on ionospheric conditions. The higher TSS scores in 2020, especially notable in the ConvGRU-LC model, illustrate a sophisticated ability to differentiate between scintillation and non-scintillation conditions accurately. The progressive improvement in TSS across the years is indicative of the models’ enhanced discrimination power, which is essential for reliable ionospheric forecasting. The analysis indicates that the models’ performance varies not only with solar activity but also seasonally. The better performance in July across all years and models may be attributed to more stable geophysical and solar conditions, which provide a consistent environment for model predictions. Conversely, the variability observed in March could be linked to equinox-related ionospheric disturbances, which are notoriously difficult to model due to their dynamic nature. The year 2015 showed more pronounced ionospheric activity due to the solar maximum, leading to higher instances of scintillation that challenge model accuracy. In contrast, the quieter solar conditions in 2020 allowed for more stable model outputs and lower error rates, reinforcing the impact of solar activity levels on prediction success. This expanded analysis not only reinforces the need for adaptive modeling strategies across different solar phases but also highlights the importance of considering seasonal variations in ionospheric prediction models.
7. Conclusions
This study investigated the relationship between geomagnetic activities and ionospheric scintillations, particularly focusing on how solar and geomagnetic parameters influence ionospheric conditions across various temporal frameworks and latitudinal extents. By integrating critical indices such as Kp, Dst, sunspot numbers, and the F10.7 solar flux, we elucidated the complex dynamics governing ionospheric disturbances. These disturbances hold significant ramifications for the dependability of satellite communications and navigation systems, especially prevalent in regions of low latitude. Our findings accentuated the pronounced impact that fluctuations in geomagnetic conditions exert on the prevalence of ionospheric scintillations. High solar activity periods, marked by elevated sunspot and F10.7 index values, coincide with intensified geomagnetic disturbances as indicated by escalated Kp and Dst indices. This escalation is accompanied by increased ionospheric scintillation activities, particularly occurring during the solar maximum of 2015. In contrast, the relatively calm geomagnetic conditions observed in 2020—a period of solar minimum—were associated with reduced scintillation activities, thus highlighting a direct correlation between solar activity levels and ionospheric disturbances. Additionally, this study emphasized the temporal variability of geomagnetic effects on ionospheric scintillation by examining specific months that represent different seasonal conditions—the winter and summer solstices, and the equinoxes. This seasonal analysis exposed distinct patterns that aligned with anticipated increases or decreases in ionospheric scintillation occurrences based on geomagnetic indices and solar activity fluctuations. Innovatively, this research utilized advanced machine-learning techniques, particularly the application of ConvGRU networks, to model and predict ionospheric scintillation. This approach leveraged the power of artificial intelligence and deep learning to manage the complexities of spatiotemporal data intrinsic to ionospheric phenomena. Employing neural network architectures, including RNNs, GRUs, and ConvGRUs enhanced our capability to predict dynamic changes in the ionosphere with greater accuracy. The ConvGRU model, a centerpiece of this analysis, marks a significant advancement by integrating convolution operations within the GRU framework. This integration enables the ConvGRU model to effectively capture both temporal sequences and spatial distributions, particularly accommodating ionospheric two-dimensional data. The model’s ability to handle the intrinsic variability of ionospheric data and improve prediction accuracy by addressing long-term dependencies and spatial feature recognition is a notable enhancement over traditional neural network methods. In this research, we utilized ground-based GNSS data from 121 stations across South America to model and predict ionospheric scintillations under varying solar and geomagnetic conditions during January, March, and July of 2015 and 2020. By comparing ionospheric behaviors during these periods, our study not only illuminated the dynamic nature of ionospheric disturbances but also refined methodologies to predict such phenomena with enhanced precision. This was particularly evident in how higher TEC values correlated with increased scintillation occurrences near equatorial ionospheric anomalies—regions notoriously susceptible to heightened geomagnetic disturbances. Key findings from the study underscore the impact of the solar cycle on ionospheric conditions, with 2015 experiencing more frequent and intense scintillation events compared to 2020. The ConvGRU models (ConvGRU-LC, ConvGRU-Llog-cosh, and ConvGRU-Lδ), tailored specifically for this study, demonstrated varying degrees of effectiveness, with the ConvGRU-LC model generally outperforming others in terms of accuracy and reliability across different testing phases. Our analysis of the performance metrics—CC, RMSE, and ME—across various testing intervals revealed that the ConvGRU-LC model consistently outperformed the ConvGRU-Llog-cosh and ConvGRU-Lδ models. In 2015, the ConvGRU-LC model achieved a CC of 0.91 in January and March, which slightly improved to 0.92 in July. In comparison, the ConvGRU-Llog-cosh model maintained a CC of about 0.89 throughout the same year, whereas the ConvGRU-Lδ model lagged with a CC of 0.78 in July, marking it the lowest among the models. This shows a clear superiority of the ConvGRU-LC model in handling complex ionospheric data with more accuracy. Moreover, the ConvGRU-LC model not only excelled in correlation coefficient but also showed significantly better performance in terms of RMSE and ME. Moreover, our detailed examination of performance metrics across the ConvGRU models, particularly focusing on statistical parameters such as FAR, CSI, POD, and TSS presented clear distinctions in model efficacy. Data from 2015 and 2020, spanning January, March, and July revealed that the ConvGRU-LC model consistently outperformed its counterparts. For instance, in January 2020, ConvGRU-LC achieved a lower FAR of 0.19 compared to 0.20 for ConvGRU-Llog-cosh, marking a 5% improvement. Additionally, ConvGRU-LC exhibited a POD of 0.80, demonstrating about 2.56% better detection capability than the 0.78 ConvGRU-Llog-cosh. Further comparison between ConvGRU-LC and ConvGRU-Lδ shows more pronounced differences; ConvGRU-LC’s FAR of 0.19 in January 2020 improved by about 9.52% over ConvGRU-Lδ’s FAR of 0.21. The TSS for ConvGRU-LC was also superior, recording 0.72 compared to 0.69 for ConvGRU-Lδ—a 4.35% enhancement. When ConvGRU-Llog-cosh was compared with ConvGRU-Lδ, the former generally presented better performance metrics, such as a CSI of 0.68 in July 2020, approximately 3.03% higher than the 0.66 for ConvGRU-Lδ. These findings underscore the ConvGRU-LC model’s robust adaptability and precision in modeling ionospheric scintillations, particularly advantageous under varying geomagnetic and solar conditions, evidenced by its lower false alarm rates and higher overall skill scores. In conclusion, the integration of ConvGRU networks in this study signifies a pivotal advancement in the predictive modeling of ionospheric disturbances, suggesting potential for the development of real-time or near-real-time monitoring systems. Future research will aim to further refine these models, broaden their geographical applicability, and integrate more sophisticated atmospheric data inputs to elevate the accuracy and reliability of predictions. This progression is essential for mitigating the impacts of space weather on contemporary technological systems and for fostering the advancement of global satellite communication networks.
Author Contributions
Methodology, A.A.; software, A.A.; investigation, A.A.; data curation, A.A.; writing—original draft, A.A.; writing—review and editing, A.A., I.J., M.A. and R.B.L.; supervision, I.J., M.A. and R.B.L.; project administration, I.J., M.A. and R.B.L.; funding acquisition, R.B.L. All authors have read and agreed to the published version of the manuscript.
Funding
The Article Processing Charges (APC) were funded by the Natural Sciences and Engineering Research Council of Canada (NSERC).
Data Availability Statement
The GNSS data received from the network of stations with a 121-observation rate can be downloaded from the UNAVCO website at https://www.unavco.org/data/gps-gnss/gps-gnss.html. Data pertaining to solar flux (F10.7) and sunspot number (SSN) values can be acquired from the German Research Centre for Geosciences (GFZ). These datasets are accessible via their website at https://kp.gfz-potsdam.de/en/data. Furthermore, additional geomagnetic indices, namely Kp and Dst, are available through the International Service of Geomagnetic Indices (ISGI), hosted at https://isgi.unistra.fr.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 3, 325–331. [Google Scholar] [CrossRef]
- Prieto-Cerdeira, R.; Orús-Pérez, R.; Breeuwer, E.; Lucas-Rodriguez, R.; Falcone, M. Performance of the Galileo single-frequency ionospheric correction during in-orbit validation. GPS World 2014, 25, 53–58. [Google Scholar]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The BeiDou global broadcast ionospheric delay correction model (BDGIM) and its preliminary performance evaluation results. Navigation 2019, 66, 55–69. [Google Scholar] [CrossRef]
- Pi, X.; Mannucci, A.J.; Lindqwister, U.J.; Ho, C.M. Monitoring of global ionospheric irregularities using the worldwide GPS network. Geophys. Res. Lett. 1997, 24, 2283–2286. [Google Scholar] [CrossRef]
- Yang, Z.; Morton, Y.J.; Zakharenkova, I.; Cherniak, I.; Song, S.; Li, W. Global view of ionospheric disturbance impacts on kinematic GPS positioning solutions during the 2015 St. Patrick’s Day storm. J. Geophys. Res. Space Phys. 2020, 125, e2019JA027681. [Google Scholar] [CrossRef]
- Atabati, A.; Jazireeyan, I.; Alizadeh, M.; Pirooznia, M.; Flury, J.; Schuh, H.; Soja, B. Analyzing the Ionospheric Irregularities Caused by the September 2017 Geomagnetic Storm Using Ground-Based GNSS, Swarm, and FORMOSAT-3/COSMIC Data near the Equatorial Ionization Anomaly in East Africa. Remote Sens. 2023, 15, 5762. [Google Scholar] [CrossRef]
- Kelley, M.C. The Earth’s Ionosphere: Plasma Physics and Electrodynamics; Academic Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Appleton, E.V. The anomalous equatorial belt in the F2-layer. J. Atmos. Terr. Phys. 1954, 5, 348–351. [Google Scholar] [CrossRef]
- Sultan, P.J. Linear theory and modeling of the Rayleigh-Taylor instability leading to the occurrence of equatorial spread F. J. Geophys. Res. Space Phys. 1996, 101, 26875–26891. [Google Scholar] [CrossRef]
- Li, G.; Ning, B.; Otsuka, Y.; Abdu, M.A.; Abadi, P.; Liu, Z.; Spogli, L.; Wan, W. Challenges to equatorial plasma bubble and ionospheric scintillation short-term forecasting and future aspects in east and southeast Asia. Surv. Geophys. 2021, 42, 201–238. [Google Scholar] [CrossRef]
- Fejer, B.G.; Scherliess, L.; De Paula, E.R. Effects of the vertical plasma drift velocity on the generation and evolution of equatorial spread F. J. Geophys. Res. Space Phys. 1999, 104, 19859–19869. [Google Scholar] [CrossRef]
- Aveiro, H.C.; Hysell, D.L. Three-dimensional numerical simulation of equatorial F region plasma irregularities with bottomside shear flow. J. Geophys. Res. Space Phys. 2010, 115. [Google Scholar] [CrossRef]
- Abdu, M.A.; Bittencourt, J.A.; Batista, I.S. Magnetic declination control of the equatorial F region dynamo electric field development and spread F. J. Geophys. Res. Space Phys. 1981, 86, 11443–11446. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Psiaki, M.L.; Kintner, P.M. Modeling the effects of ionospheric scintillation on GPS carrier phase tracking. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1624–1637. [Google Scholar] [CrossRef]
- Skone, S.; Lachapelle, G.; Yao, D.; Yu, W.; Watson, R. Investigating the impact of ionospheric scintillation using a GPS software receiver. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 1126–1137. [Google Scholar]
- Tiwari, R.; Strangeways, H.J.; Skone, S. Modeling the effects of ionospheric scintillation on GPS carrier phase tracking using high-rate TEC data. In Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 2480–2488. [Google Scholar]
- Doherty, P.H.; Delay, S.H.; Valladares, C.E.; Klobuchar, J.A. Ionospheric scintillation effects on GPS in the equatorial and auroral regions. Navigation 2003, 50, 235–245. [Google Scholar] [CrossRef]
- Won, J.H.; Eissfeller, B.; Pany, T.; Winkel, J. Advanced signal processing scheme for GNSS receivers under ionospheric scintillation. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 44–49. [Google Scholar]
- Sun, Y.; Zhang, H.; Hu, S.; Shi, J.; Geng, J.; Su, Y. ConvGRU-RMWP: A Regional Multi-Step Model for Wave Height Prediction. Mathematics 2023, 11, 2013. [Google Scholar] [CrossRef]
- Gu, C.; Li, H. Review on deep learning research and applications in wind and wave energy. Energies 2022, 15, 1510. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Pouyanfar, S.; Sadiq, S.; Yan, Y.; Tian, H.; Tao, Y.; Reyes, M.P.; Shyu, M.L.; Chen, S.C.; Iyengar, S.S. A survey on deep learning: Algorithms, techniques, and applications. ACM Comput. Surv. (CSUR) 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Kalchbrenner, N.; Grefenstette, E.; Blunsom, P. A convolutional neural network for modelling sentences. arXiv 2014, arXiv:1404.2188. [Google Scholar]
- Mandic, D.P.; Chambers, J. Recurrent Neural Networks for Prediction: Learning Algorithms, Architectures and Stability; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Dey, R.; Salem, F.M. Gate-variants of gated recurrent unit (GRU) neural networks. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 1597–1600. [Google Scholar]
- Das, A.; Gupta, A.D.; Ray, S. Characteristics of L-band (1.5 GHz) and VHF (244 MHz) amplitude scintillations recorded at Kolkata during 1996–2006 and development of models for the occurrence probability of scintillations using neural network. J. Atmos. Sol. Terr. Phys. 2010, 72, 685–704. [Google Scholar] [CrossRef]
- Rezende, L.F.C.D.; De Paula, E.R.; Stephany, S.; Kantor, I.J.; Muella, M.T.A.H.; De Siqueira, P.M.; Correa, K.S. Survey and prediction of the ionospheric scintillation using data mining techniques. Space Weather 2010, 8. [Google Scholar] [CrossRef]
- Prikryl, P.; Jayachandran, P.T.; Mushini, S.C.; Richardson, I.G. Toward the probabilistic forecasting of high-latitude GPS phase scintillation. Space Weather 2012, 10. [Google Scholar] [CrossRef]
- De Lima, G.R.T.; Stephany, S.; De Paula, E.R.; Batista, I.S.; Abdu, M.A. Prediction of the level of ionospheric scintillation at equatorial latitudes in Brazil using a neural network. Space Weather 2015, 13, 446–457. [Google Scholar] [CrossRef]
- Atabati, A.; Alizadeh, M.; Schuh, H.; Tsai, L.C. Ionospheric scintillation prediction on s4 and roti parameters using artificial neural network and genetic algorithm. Remote Sens. 2021, 13, 2092. [Google Scholar] [CrossRef]
- McGranaghan, R.M.; Mannucci, A.J.; Wilson, B.; Mattmann, C.A.; Chadwick, R. New capabilities for prediction of high-latitude ionospheric scintillation: A novel approach with machine learning. Space Weather 2018, 16, 1817–1846. [Google Scholar] [CrossRef]
- Ruwali, A.; Kumar, A.S.; Prakash, K.B.; Sivavaraprasad, G.; Ratnam, D.V. Implementation of hybrid deep learning model (LSTM-CNN) for ionospheric TEC forecasting using GPS data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1004–1008. [Google Scholar] [CrossRef]
- Sun, W.; Xu, L.; Huang, X.; Zhang, W.; Yuan, T.; Chen, Z.; Yan, Y. Forecasting of ionospheric vertical total electron content (TEC) using LSTM networks. In Proceedings of the 2017 International Conference on Machine Learning and Cybernetics (ICMLC), Ningbo, China, 9–12 July 2017; Volume 2, pp. 340–344. [Google Scholar]
- Liu, L.; Morton, Y.J.; Liu, Y. Machine Learning Prediction of Storm-Time High-Latitude Ionospheric Irregularities from GNSS-Derived ROTI Maps. Geophys. Res. Lett. 2021, 48, e2021GL095561. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 802–810. [Google Scholar]
- Shi, X.; Gao, Z.; Lausen, L.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Deep learning for precipitation nowcasting: A benchmark and a new model. Adv. Neural Inf. Process. Syst. 2017, 30, 5622–5632. [Google Scholar]
- Liu, L.; Yao, Y.; Aa, E. Multi-instrumental observations of early morning equatorial plasma depletions during the 2017 memorial weekend storm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5351–5357. [Google Scholar] [CrossRef]
- Hong, C.K.; Grejner-Brzezinska, D.A.; Kwon, J.H. Efficient GPS receiver DCB estimation for ionosphere modeling using satellite-receiver geometry changes. Earth Planets Space 2008, 60, e25–e28. [Google Scholar] [CrossRef][Green Version]
- Arikan, F.E.Z.A.; Erol, C.B.; Arikan, O. Regularized estimation of vertical total electron content from GPS data for a desired time period. Radio Sci. 2004, 39, 1–10. [Google Scholar] [CrossRef]
- Van Dierendonck, A.J.; Klobuchar, J.; Hua, Q. Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In Proceedings of the ION GPS, Salt Lake City, UT, USA, 22–24 September 1993; Volume 93, pp. 1333–1342. [Google Scholar]
- Juan, J.M.; Aragon-Angel, A.; Sanz, J.; González-Casado, G.; Rovira-Garcia, A. A method for scintillation characterization using geodetic receivers operating at 1 Hz. J. Geod. 2017, 91, 1383–1397. [Google Scholar] [CrossRef]
- Tiwari, R.; Strangeways, H.J. Regionally based alarm index to mitigate ionospheric scintillation effects for GNSS receivers. Space Weather 2015, 13, 72–85. [Google Scholar] [CrossRef]
- Van Dierendonck, A.J.; Arbesser-Rastburg, B. Measuring ionospheric scintillation in the equatorial region over Africa, including measurements from SBAS geostationary satellite signals. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 316–324. [Google Scholar]
- Alfonsi, L.; Spogli, L.; Tong, J.R.; De Franceschi, G.; Romano, V.; Bourdillon, A.; Le Huy, M.; Mitchell, C.N. GPS scintillation and TEC gradients at equatorial latitudes in April 2006. Adv. Space Res. 2011, 47, 1750–1757. [Google Scholar] [CrossRef]
- Xiong, B.; Wan, W.X.; Ning, B.Q.; Yuan, H.; Li, G.Z. A comparison and analysis of the S4 index, C/N and Roti over Sanya. Chin. J. Geophys. 2007, 50, 1414–1424. [Google Scholar]
- Carbonell, J.G.; Michalski, R.S.; Mitchell, T.M. An overview of machine learning. Mach. Learn. 1983, 3–23. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks and Learning Machines, 3/E; Pearson Education: Karnataka, India, 2009. [Google Scholar]
- Norgaard, M. Neural Network-Based System Identification Toolbox; Department of Automation, Technical University of Denmark: Kongens Lyngby, Denmark, 2000. [Google Scholar]
- Zhang, D.; Kabuka, M.R. Combining weather condition data to predict traffic flow: A GRU-based deep learning approach. IET Intell. Transp. Syst. 2018, 12, 578–585. [Google Scholar] [CrossRef]
- Dai, G.; Ma, C.; Xu, X. Short-term traffic flow prediction method for urban road sections based on space–time analysis and GRU. IEEE Access 2019, 7, 143025–143035. [Google Scholar] [CrossRef]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of the ICML, Atlanta, GA, USA, 16–21 June 2013; Volume 30, No. 1. p. 3. [Google Scholar]
- Liu, X.; Lin, Z.; Feng, Z. Short-term offshore wind speed forecast by seasonal ARIMA-A comparison against GRU and LSTM. Energy 2021, 227, 120492. [Google Scholar] [CrossRef]
- Martin-Donas, J.M.; Gomez, A.M.; Gonzalez, J.A.; Peinado, A.M. A deep learning loss function based on the perceptual evaluation of the speech quality. IEEE Signal Process. Lett. 2018, 25, 1680–1684. [Google Scholar] [CrossRef]
- Qi, J.; Du, J.; Siniscalchi, S.M.; Ma, X.; Lee, C.H. On mean absolute error for deep neural network-based vector-to-vector regression. IEEE Signal Process. Lett. 2020, 27, 1485–1489. [Google Scholar] [CrossRef]
- Barron, J.T. A general and adaptive robust loss function. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4331–4339. [Google Scholar]
- Wang, Q.; Ma, Y.; Zhao, K.; Tian, Y. A comprehensive survey of loss functions in machine learning. Ann. Data Sci. 2020, 9, 187–212. [Google Scholar] [CrossRef]
- Li, G.; Ning, B.; Zhao, B.; Liu, L.; Liu, J.Y.; Yumoto, K. Effects of geomagnetic storm on GPS ionospheric scintillations at Sanya. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1034–1045. [Google Scholar] [CrossRef]
- Li, G.; Ning, B.; Wang, C.; Abdu, M.A.; Otsuka, Y.; Yamamoto, M.; Wu, J.; Chen, J. Storm-enhanced development of postsunset equatorial plasma bubbles around the meridian 120°E/60°W on 7–8 September 2017. J. Geophys. Res. Space Phys. 2018, 123, 7985–7998. [Google Scholar] [CrossRef]
- Zolesi, B.; Cander, L.R. Ionospheric Prediction and Forecasting; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- De Lima, G.R.T.; Stephany, S.; De Paula, E.R.; Batista, I.S.; Abdu, M.A.; Rezende, L.F.C.D.; Aquino, M.G.D.S.; Dutra, A.P.S. Correlation analysis between the occurrence of ionospheric scintillation at the magnetic equator and at the southern peak of the Equatorial Ionization Anomaly. Space Weather 2014, 12, 406–416. [Google Scholar] [CrossRef]
- de Paula, E.R.; de Oliveira, C.B.; Caton, R.G.; Negreti, P.M.; Batista, I.S.; Martinon, A.R.; Neto, A.C.; Abdu, M.A.; Monico, J.F.; Sousasantos, J.; et al. Ionospheric irregularity behavior during the September 6–10, 2017 magnetic storm over Brazilian equatorial–low latitudes. Earth Planets Space 2019, 71, 42. [Google Scholar] [CrossRef]
- Kaselimi, M.; Voulodimos, A.; Doulamis, N.; Doulamis, A.; Delikaraoglou, D. Deep recurrent neural networks for ionospheric variations estimation using GNSS measurements. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5800715. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Xu, B.; Wang, N.; Chen, T.; Li, M. Empirical evaluation of rectified activations in convolutional network. arXiv 2015, arXiv:1505.00853. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Allouche, O.; Tsoar, A.; Kadmon, R. Assessing the accuracy of species distribution models: Prevalence, kappa and the true skill statistic (TSS). J. Appl. Ecol. 2006, 43, 1223–1232. [Google Scholar] [CrossRef]
- Fowle, M.A.; Roebber, P.J. Short-range (0–48 h) numerical prediction of convective occurrence, mode, and location. Weather Forecast. 2003, 18, 782–794. [Google Scholar] [CrossRef]
- Schaefer, J.T. The critical success index as an indicator of warning skill. Weather Forecast. 1990, 5, 570–575. [Google Scholar] [CrossRef]
- Wehling, P.; LaBudde, R.A.; Brunelle, S.L.; Nelson, M.T. Probability of detection (POD) as a statistical model for the validation of qualitative methods. J. AOAC Int. 2011, 94, 335–347. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).