1. Introduction
Synthetic-aperture radar (SAR) is a type of high-resolution imaging radar, and it also possesses imaging capability under all weather and all time conditions; thus, it has been widely deployed [
1,
2]. Common SAR satellites include the Sentinel satellites from Europe, RADARSAT satellites from Canada, and Haisi satellites from China. With the massive deployment of satellite-borne and airborne SAR systems, the imaging data have also been widely used in geodetic surveying [
3], target recognition [
4], ship detection [
5,
6], and super-resolution [
7,
8]. However, during the detection process of SAR satellites, various types of intentional or unintentional interference can cause SAR satellites to be blinded [
9,
10]. Among them, radio-frequency interference (RFI) is one of the most common interference patterns. RFI can be divided into narrowband interference and broadband interference. Usually, RFI is the direct wave, and its power is much stronger than the reflected wave of targets. Therefore, the coverage area of radio-frequency interference is wide and the interference intensity is high, resulting in the complete concealment of targets in the RFI-polluted areas. A common RFI-polluted image in Sentinel-1A is shown in
Figure 1. As a countermeasure method, interference suppression aims to restore the clean image from the RFI-polluted image, laying the foundation for subsequent radar interpretation and other tasks, so it holds significant scientific research value and practical value.
The difficulty in interference suppression lies in how to filter out interference signals while preserving radar signals as much as possible. Interference suppression algorithms can be roughly divided into four categories: non-parametric methods, parametric methods, semi-parametric methods, and deep learning methods [
11]. Non-parametric methods include notch filters [
12,
13], adaptive filters [
14], and subspace projection filters [
15,
16,
17]. For non-parametric methods, although they are simple, they also have significant limitations. They require a large difference between the interference signals and the radar signals, and when the difference characteristics are not obvious, their performance is insufficient [
11]. In addition, non-parametric methods also filter out some radar signals when filtering out interference, which may cause target loss. For parametric methods, they need to model the echo signals [
18,
19], and their performance is limited by the model’s complexity. Especially for some complex interference scenarios, their performance is unclear. With the rise of compressed sensing and deep learning [
20,
21], sparse reconstruction methods and deep learning methods have gradually become the mainstream. Unlike parametric methods, semi-parametric methods do not directly model radio-frequency interference. Instead, they rely primarily on iterative loss functions to achieve matrix decomposition, effectively separating interference from aliased signals. These approaches not only filter out interference but also preserve radar signals, resulting in superior performance. Numerous iterative models have been proposed, including sparse models [
22,
23], low-rank models [
24,
25,
26], and joint sparse low-rank models [
27,
28,
29,
30,
31,
32]. A previous work [
25] proposes a robust principal component analysis method that uses sparse constraints to iteratively solve for principal components in the time–frequency domain to separate the interference. A previous work [
33] proposes a weighted vector decomposition method that separates the interference from the aliased signals through low-rank constraints and sparse constraints. The work in [
34] proposes a suppressing interference method by using blind source separation for singular value and eigenvalue decomposition based on information entropy. Although the above methods have achieved excellent performance, their computational complexity is high, and their performance is also unclear for complex combined interference scenarios. A previous work [
35] presented an advanced approach for suppressing range ambiguity using blind source separation, and a previous work [
36] presented a novel interference suppression method using secondary compensation.
Due to its good generalization ability, deep learning has been widely applied in SAR target interpretation [
36,
37,
38,
39,
40], interference detection [
41,
42], etc. A previous work [
43] proposed a new feature decomposition and reconstruction learning method to improve the facial expression recognition accuracy. A previous work [
44] proposed to use an encoder–decoder network as the feature decomposition network to decompose the feature maps into same or different features based on their similarities or differences of visible and infrared images. In SAR target detection, a previous work [
45] proposed to use the feature decomposition network to select the ideal features and discard the noise features, and finally the ideal features were used to carry out target detection. Overall, the feature decomposition networks have shown excellent performance in a variety of tasks.
What is more, deep learning has also gradually gained attention in the field of interference suppression. A previous work [
46] proposed an interference suppression method based on combining interference detection and notch filtering. Firstly, it used the single-shot multi-box detector to detect interference and then used a traditional notch filter to separate the interference. A previous work [
47] proposed a domain invariant feature interference suppression network, which optimizes the loss function to make the network focus only on the interference region, thus achieving the purpose of interference localization in cross-sensor experiments. Then, it also used a traditional notch filter to separate the interference. A previous work [
48] introduced inpainting networks into SAR interference suppression for the first time and achieved a good result. A previous work [
49] embed the sparsity constraints of interference and low-rankness constraints of radar signals into the loss function, and its performance exceeds semi-parametric methods such as RPCA. In the time–frequency spectrogram, due to the negative contribution of variable interference components to image inpainting, a previous work [
50] proposed a joint image segmentation and image inpainting network, which greatly improves the image quality by separating variable interference components before inpainting.
Although the above deep learning methods have achieved good performance, there are still some shortcomings: First, in the time–frequency spectrogram, the interference intensity is uncertain, and the variable interference power can reduce the network performance. Although some methods attempt to solve the above problems, they do not reveal the underlying mechanism. Secondly, excessive variable interference components can also cause the network to require more neurons to deal with, which increases the difficulty of inpainting. To solve the above problems, firstly, this paper proposes a novel data regularization method and its superiority is proved by data distribution histograms and experiments. Secondly, this paper proposes a feature decomposition network, and it can separate interference from the network and improve performance. The innovations of this paper are as follows:
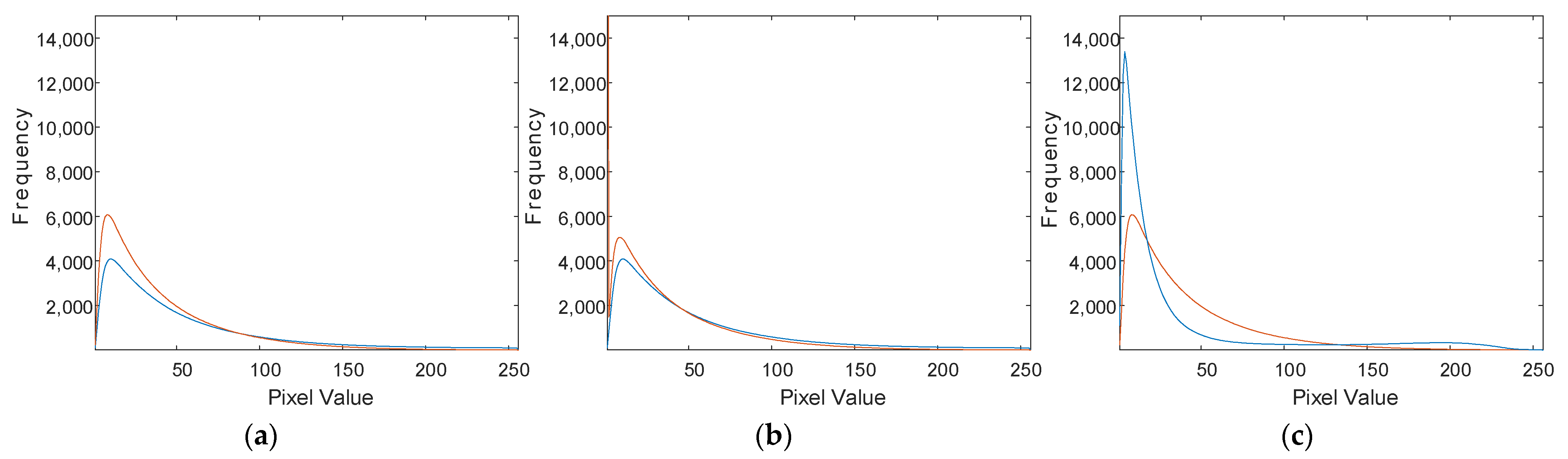
By analyzing the performance limitations of existing methods, this paper proposes a new data regularization method for radio-frequency interference suppression tasks. From the perspective of data distribution histograms and residual components, the proposed method eliminates the variable components introduced by the common regularization method, and the mapping relationship between input and output data has been transformed from a Gaussian relationship to an approximately linear relationship. Data mapping is much simpler, so it can improve the network’s robustness and performance. In addition, this regularization method can be extended to other radar-interference suppression tasks.
This paper proposes a feature decomposition network, in which the feature decomposition block consists of two parts; one part only represents the interference signal, and the other part only represents the radar signal. The neurons representing the interference signal are discarded, and the neurons representing the radar signal are used as the input of the subsequent network. A cosine similarity constraint is added to the loss function to separate the interference from the network as much as possible, thereby improving its performance. Moreover, this module can also be extended to other abnormal datasets containing noise, interference, etc.
This paper is organized as follows.
Section 2 introduces the principle of interference suppression in the signal domain.
Section 3 introduces the proposed network, loss function, and regularization method. The experimental results are presented in
Section 4, and
Section 5 summarizes the total paper.
4. Experiments
This work conducted three experiments. The first part is an ablation study, which mainly includes comparative experiments on different regularization methods, different feature decomposition networks, and different prior information terms. The second part is the MiniSAR experiment, and the third part is the Sentinel-1A experiment. In our experiments, the image size of the training data is 512 × 512. In
Section 4.1 and
Section 4.2, the training data come from MiniSAR, with a data volume of 3072 images, and in
Section 4.3, the training data come from Sentinel-1, with a data volume of 2048 images. All training data are the semi-physical simulation data. The optimizer for the network is AdamW, the maximum epoch is 100, the initial learning rate is 0.002, and the weight decay is 0.02. Each group of testing data consists of 512 images, and all testing and training data come from different imaging scenarios.
A previous work [
50] adopts PSNR, SSIM, and ME as the evaluation metrics, and we also select the above indicators to evaluate the image quality. The selection of evaluation indicators varies in different experiments for the following reasons: Firstly, MiniSAR data are semi-physical simulation data, while Sentinel satellite data are measured RFI-polluted data. Secondly, PSNR and SSIM are the relative evaluation metrics, and they are used to measure the similarity between the filtered images and the labels, while ME is a self-evaluation metric. Thirdly, as MiniSAR is semi-physical simulation data, they relatively easily obtain both RFI-polluted data and RFI-free data. However, Sentinel satellite data are measured RFI-polluted data. In a single measurement, we either obtain RFI-polluted data or RFI-free data. It is difficult to obtain both RFI-polluted data and RFI-free data simultaneously. Therefore, in the MiniSAR data, we simultaneously selected the above three evaluation indicators, while in the Sentinel satellite data, we only selected the third evaluation indicator.
PSNR is usually used to evaluate the quality of images, and it is calculated as follows:
is the filtered image,
is the label,
is root mean square, and
H and
W represent image size. PSNR is the evaluation index of the noise level. The larger the PSNR, the better the performance. The structural similarity (SSIM) can be expressed as follows:
is the mean value,
is the variance or covariance. A higher structural similarity indicates better performance. However, for the Sentinel-1 satellite, labels are lacking, so the aforementioned evaluation metrics are no longer applicable. To address this issue, this paper also adopts ME as an evaluation metric. ME is defined as follows:
is the entropy, is the mean value. A smaller entropy indicates that pixel values are concentrated in a smaller range. A smaller mean value indicates less interference. Therefore, a smaller ME indicates better performance.
4.1. Ablation Study
To separately validate the various components of the proposed method, this section conducts three experiments. The first experiment mainly verifies the impact of different regularization methods, the second verifies the feature decomposition network, and the third verifies the impact of prior information terms. To increase generalization, the test data contain three types of interference: narrowband interference, sinusoidal modulated wideband interference, and chirp wideband interference. The bandwidth of narrowband interference is less than 30 MHz, the bandwidth of chirp wideband interference is ranging from 30 MHz to 150 MHz, and the bandwidth of sinusoidal modulated wideband interference is ranging from 30 MHz to 100 MHz.
4.1.1. Different Regularization Methods
This work conducts comparative experiments on three different regularization methods. To enhance the persuasiveness, we conduct relevant experiments on both UNet [
53] and Uformer [
54]. UNet is a U-shaped network composed of CNNs, while Uformer is a U-shaped network composed of transformers. The experimental results are shown in
Figure 7,
Figure 8 and
Figure 9.
Figure 7 is the result under narrowband interference,
Figure 8 is the result under chirp wideband interference, and
Figure 9 is the result under sinusoidal modulated wideband interference. The test metrics are shown in
Table 3. Comparing the first regularization method with our method, in UNet, the improvement in PSNR is 4.75 dB, and the improvement of SSIM is 3.06 percentage points; in Uformer, the improvement in PSNR is 3.72 dB, and the improvement of SSIM is 2.38 percentage points. Comparing the second regularization method with our method, our method still achieves optimal performance. The above experimental results show that our method achieves significant performance improvements in both networks, and it is consistent with the conclusions in
Section 3.3. Additionally, compared to the second regularization method, our method does not require segmenting the interfered regions before image restoration, so it is much simpler.
4.1.2. Ablation Study on FDNet
This work integrates the feature decomposition block into CNN-based and transformer-based networks, and the experimental results are shown in
Figure 10 and
Table 4. Comparing CNN networks with transformer networks, transformers exhibit superior performance, with an improvement of 1.23 dB in PSNR and 0.7 percentage points in SSIM. In CNN-based networks, compared to UNet, the proposed FD-UNet achieves an improvement of 0.21 dB in PSNR and 0.22 percentage points in SSIM. Compared to Uformer, FD-Uformer achieves an improvement of 0.25 dB in PSNR and 0.04 percentage points in SSIM. Therefore, we ultimately choose Uformer as the baseline network and embed the feature decomposition block into it, and it is namely FDNet. The network is illustrated in
Figure 2, and its internal structure is depicted in
Figure 4.
4.1.3. Ablation Study in Different Prior Information
In Equation (26), we can see that the loss function also incorporates a prior information term. In this work, we validated four prior information items, namely L1, L2, TV-L1, and TV-L2 [
47]. The L1 constraint tends to make the output sparser, while the L2 constraint tends to make the output smoother. The total variation (TV) term is designed to remove noise. This work tests the combinations of TV with L1 and L2 separately. The experimental results are shown in
Table 5. Because the time–frequency spectrogram does not exhibit significant sparse characteristics, these four prior information terms contribute little to the final network performance. Therefore, subsequent FDNet will not adopt these constraints.
4.2. MiniSAR Experiments
The FDNet is shown in
Figure 2, and its internal structure is shown in
Figure 4. This work selects DIFNet, PISNet, and FuSINet as comparative networks and conducts experiments on narrowband interference and wideband interference. DIFNet is a variant of the notch filter, which first segments the interference and then filters it out. In addition, the network is often less sensitive to noise power and other factors, so this method performs better than CFAR or other notch filters. PISNet and FuSINet are image inpainting networks. PISNet adds low-rank constraints to the network, while FuSINet first segments the interference area and then repairs the segmented area.
The parameters of MiniSAR are shown in
Table 6, and the data were made public by the Sandia National Laboratories. The radar operates in the X-band, its bandwidth is 1.5 GHz, and its polarization mode is HH. The resolution of the MiniSAR images is 0.1 m. The measured MiniSAR data do not contain radio-frequency interference. In order to conduct experiments on MiniSAR data, we conducted a semi-physical simulation on the above data, and the simulated interference parameters are shown in
Table 7. In the semi-physical simulation, we load the interference data into the true SAR echoes, and then perform imaging processing on the RFI-polluted echoes to obtain the RFI-polluted SAR images. In the semi-physical simulation, the radio-frequency interference can be divided into narrowband interference, chirp modulation wideband interference, and sinusoidal modulation wideband interference. The bandwidth of narrowband interference is less than 30 MHz, the bandwidth of the chirp modulation wideband interference is 30 M~150 MHz, the bandwidth of the chirp modulation wideband interference is 30 M~100 MHz, and the signal-to-interference ratio of all situations is −15 dB~0 dB.
4.2.1. Narrowband Interference
The parameters of the narrowband interference are shown in
Table 6. The bandwidth of the interference signal is less than 30 MHz, and the signal-to-interference ratio (SIR) ranges from −15 dB to 0 dB. The time–frequency spectrogram of narrowband interference is presented in
Figure 11, and the SAR image is shown in
Figure 12. From
Figure 11 and
Figure 12, it can be observed that FuSINet and FDNet achieve higher image restoration quality and preserve more details. The performance indicators are shown in
Table 8. On the time–frequency spectrogram, compared to PISNet, FDNet achieves an improvement of 5.93 dB in PSNR and 1.77 percentage points in SSIM. Compared to FuSINet, FDNet improves PSNR by 1.45 dB and SSIM by 0.6 percentage points. On the SAR image, compared to PISNet, FDNet improves PSNR by 3.16 dB and SSIM by 2.22 percentage points and reduces ME by 0.07. Compared to FuSINet, FDNet improves PSNR by 0.92 dB and SSIM by 1.08 percentage points, and ME remains unchanged.
4.2.2. Wideband Interference
The image restoration results for broadband interference are shown in
Figure 13 and
Figure 14. From these figures, it can be observed that FuSINet and FDNet achieve higher quality and preserve more details. The performance indicators are presented in
Table 9. On the time–frequency spectrogram, compared to PISNet, FDNet achieves an improvement of 6.18 dB in PSNR and 1.32% in SSIM. Compared to FuSINet, FDNet improves PSNR by 1.23 dB and SSIM by 1.1 percentage points. On the SAR image, compared to PISNet, FDNet improves PSNR by 4.37 dB and SSIM by 1.12 percentage points and reduces ME by 0.09. Compared to FuSINet, FDNet improves PSNR by 0.34 dB and SSIM by 0.58 percentage points and reduces ME by 0.01. From the experimental results under these two interference patterns, we can conclude that all four methods can eliminate interference, and the proposed method acquires the optimal results.
4.3. Sentinel-1A Experiments
The Sentinel-1 satellite is a part of the Earth observation satellites within the Copernicus program of the European Space Agency, and its parameters are shown in
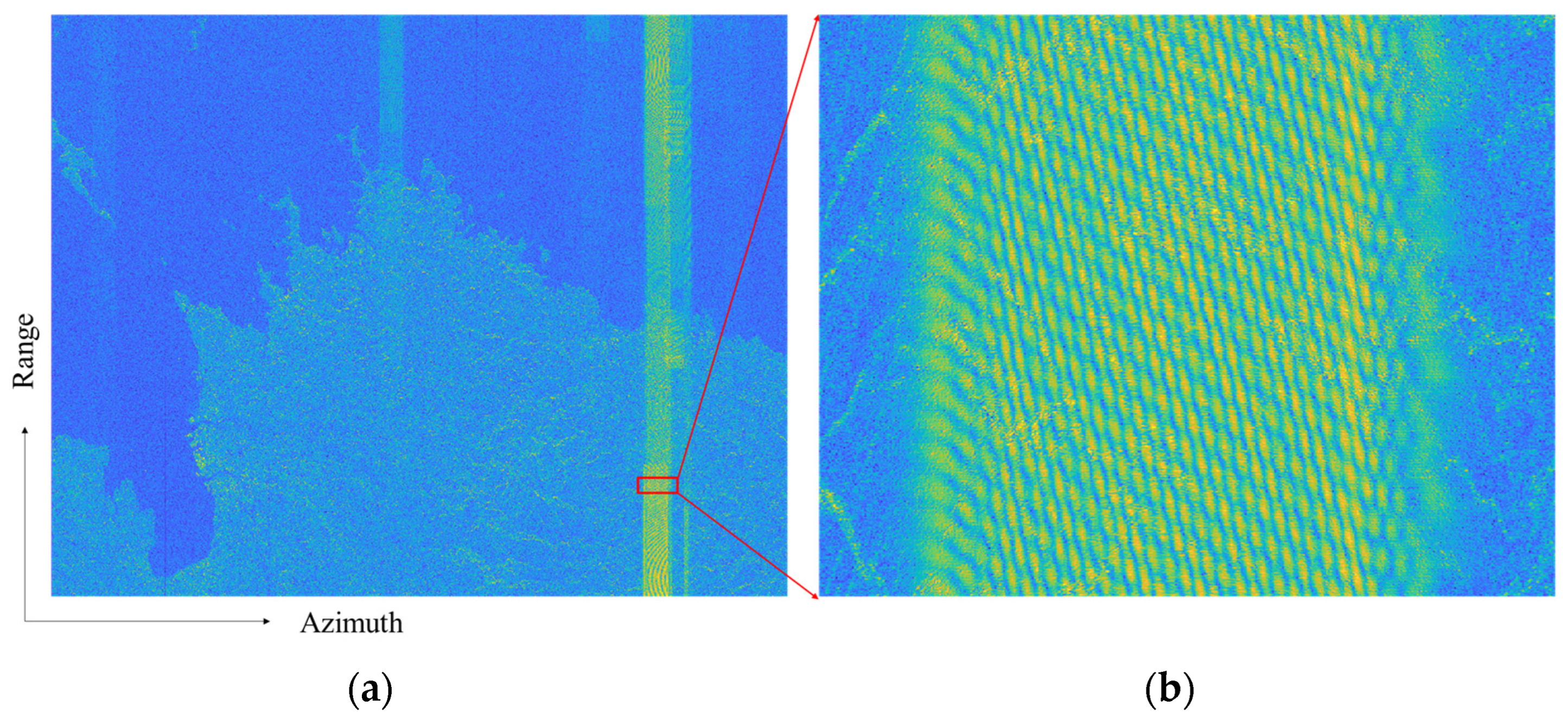
Table 10. It works in C-band, its resolution is 3 m in range and 14 m in azimuth, and it provides two polarization modes, namely VV and VH. During radar imaging, the satellites may encounter intentional and unintentional interference, and the common examples are shown in
Figure 15, which were captured in Japan on 25 March 2021.
Figure 15a is the RFI-polluted image, and
Figure 15b is a selected candidate region for validation experiments. Because the interference patterns and power are unknown, the test data are highly representative. In this work, PISNet, FuSINet, and FDNet are selected as comparison methods, and ME is chosen as the evaluation metric. For satellite data, it lacks labels, so PSNR is no longer applicable.
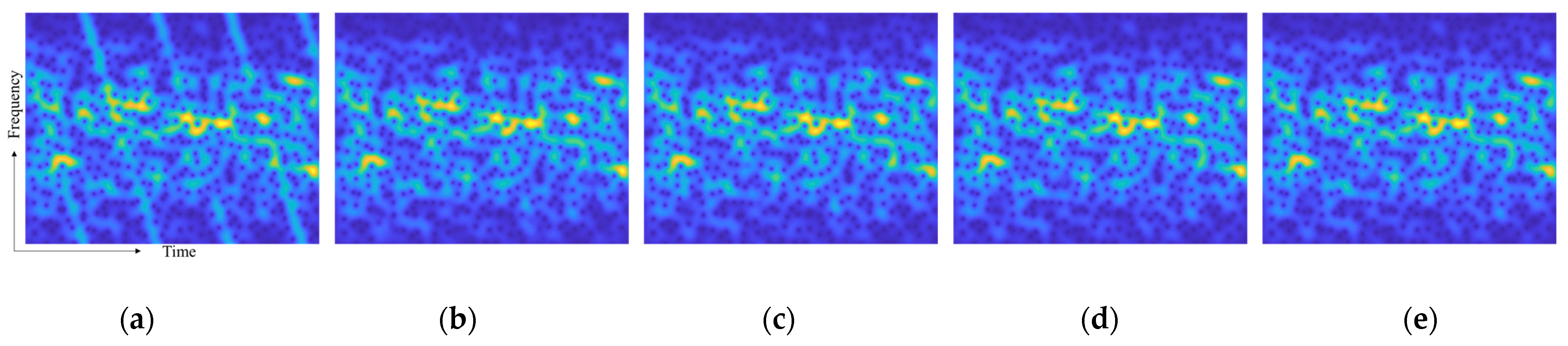
The restored time–frequency spectrogram is shown in
Figure 16.
Figure 16a is the interfered time–frequency spectrogram,
Figure 16b is the time–frequency spectrogram by PISNet,
Figure 16c is the spectrogram by FuSINet, and
Figure 16d is the spectrogram by FDNet. From
Figure 16a, we can see that the current interference is a kind of narrowband interference. It is evident that
Figure 16b,c still contain some residual interference, while
Figure 16d merely contains residual interference. The filtered SAR images are presented in
Figure 17.
Figure 17a is the RFI-polluted image,
Figure 17b is the SAR image by PISNet,
Figure 17c is the SAR image by FuSINet, and
Figure 17d is the SAR image by FDNet. From
Figure 17, it can be seen that the current interference power is higher, and the RFI-polluted targets are completely obscured by the interference. However, all three methods can eliminate most of the interference.
Figure 17b,c still contain some residual components,
Figure 17b shows blurry textures, and
Figure 17d exhibits fewer residual components and clearer textures. The experimental metrics are shown in
Table 11, and it can be seen that compared to PISNet, the ME decreases by 0.08, and compared to FuSINet, the ME decreases by 0.03; thus, it shows that our method achieves the best result.
5. Conclusions
Synthetic-aperture radar, as a type of all-weather, all-time, high-resolution imaging radar, has been widely deployed. However, during imaging, SAR is susceptible to various intentional or unintentional interferences. Among them, radio-frequency interference is a common form, and the interference signal is the direct wave. Compared to the transmitted wave of the target, the interference power is higher. Ultimately, radio-frequency interference will cover a large area, which greatly reduces SAR image quality. To suppress interference, this paper proposes a feature decomposition network based on regularization optimization. In the proposed feature decomposition network, a part of the neurons is dedicated to representing interference, while the other part focuses on representing clean signals. The neurons representing clean signals are as input for subsequent networks, while those representing interference are discarded. Secondly, a novel data regularization is introduced, which significantly improves the performance and is validated by data distribution histograms and experiments. On both the MiniSAR and Sentinel-1A datasets, the proposed method achieves excellent performance on the narrowband of wideband interference. What is more, the regularization method can be extended to other SAR tasks, and the proposed network can also be transferred to other tasks involving disturbance components. Lastly, we find that the current algorithm does not perform well in cross-sensor experiments, so we believe that transfer learning and self-supervised learning deserve further investigation. In addition, the RFI models also include some other types, such as AM, FM, QPSK, etc. The interference suppression methods for the above signals also deserve further research.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}