
Hydrographic Inspection Using a USV of a Harbour Bottom Deepened by the Periodic Actuation of SAR Vessel Propellers



Abstract
1. Introduction
- To demonstrate that the USV, thanks to its special manoeuvring properties and shallow draught, is an optimal tool for carrying out urgent inspections of the bottom in order to ensure the monitoring and maintenance of the technical condition of any water area.
- To propose ways to present the results of bathymetric surveys in shallow areas that enable effective discussion and analysis.
- To show that the proposed method ensures a position accuracy of 0.05 m (p = 0.95) and a depth measurement accuracy of 0.2 m. It meets the requirements of IHO S-44 [1] for port waters Exclusive Order category.
2. Materials and Methods
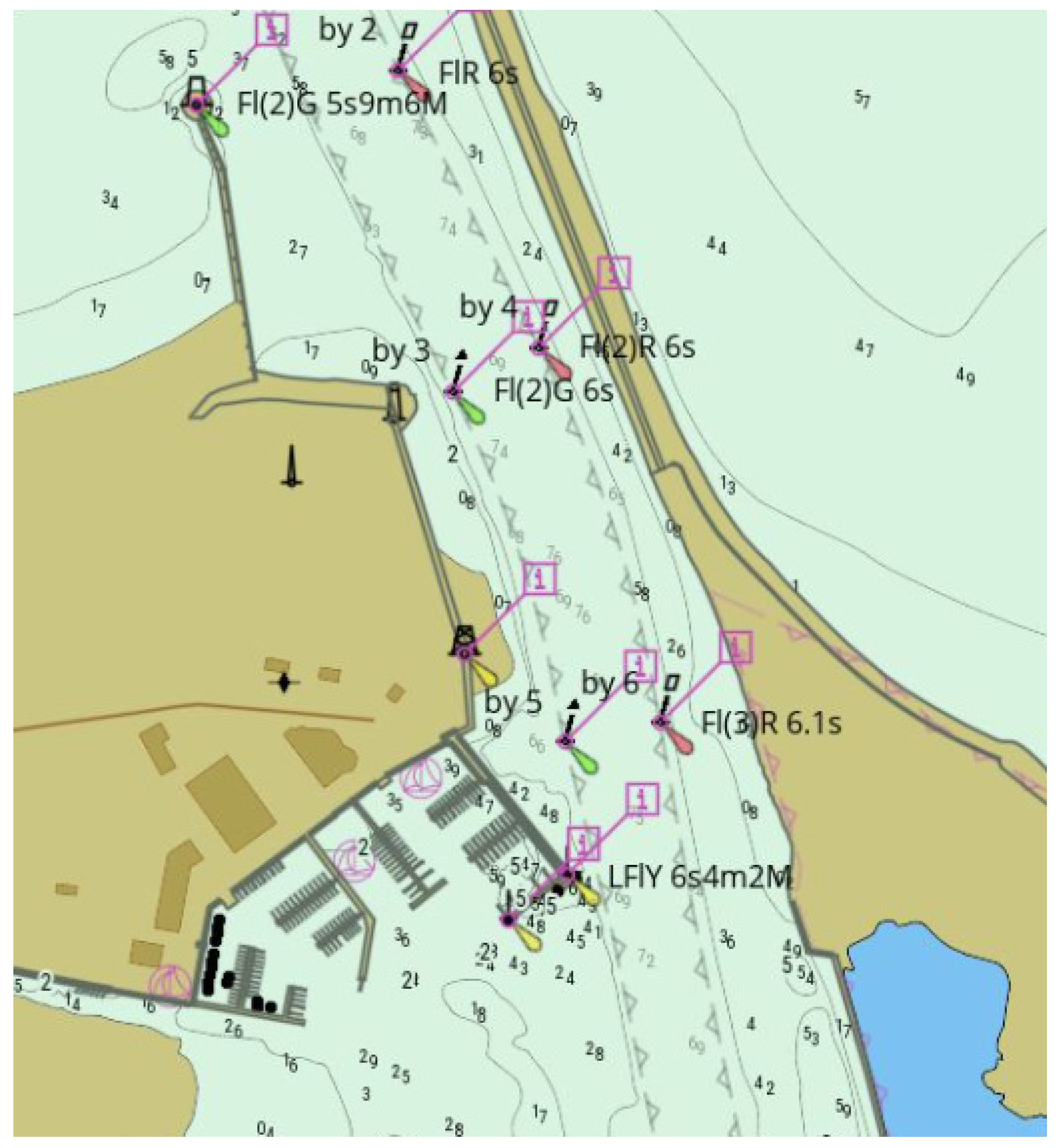
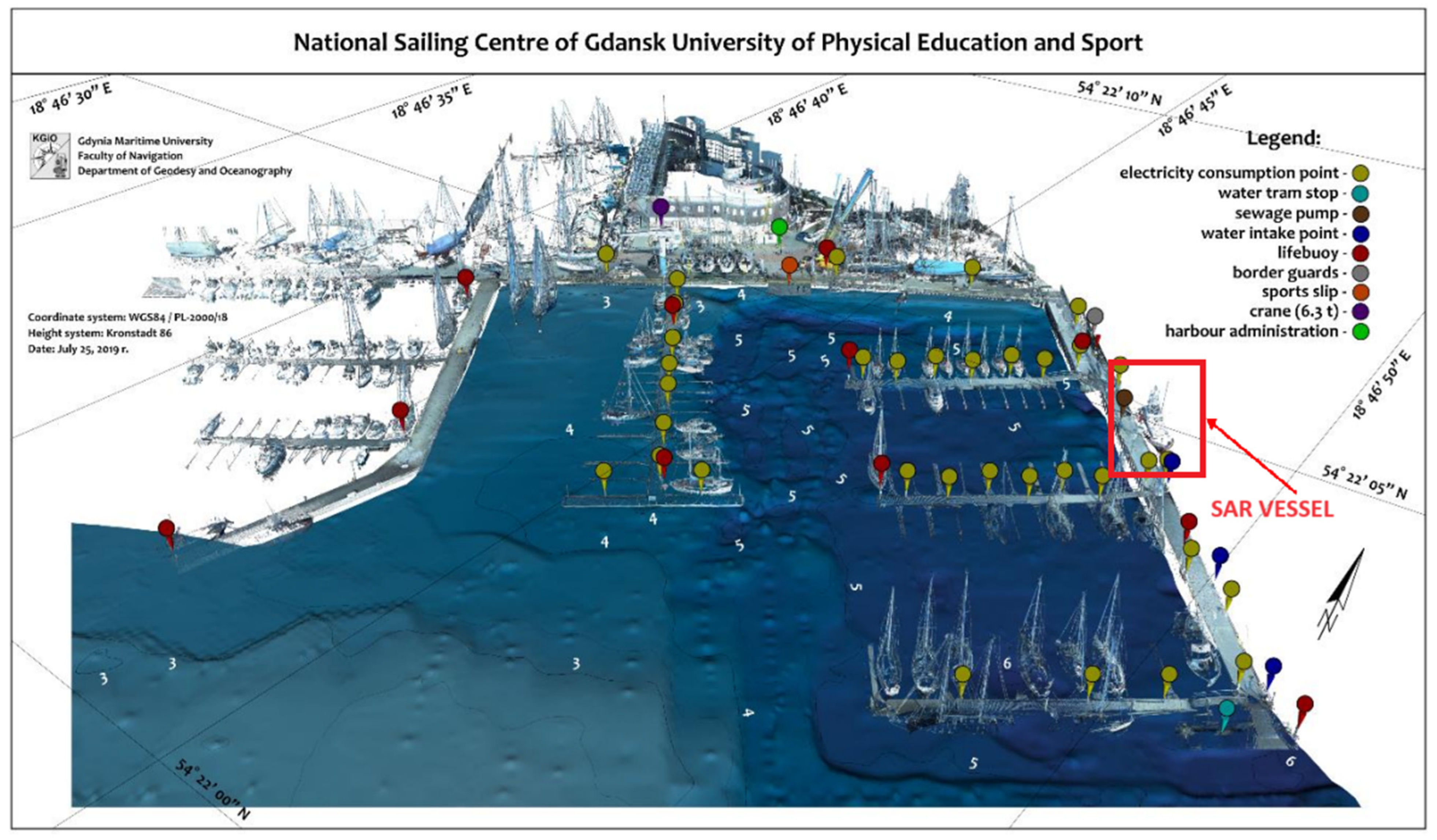
2.1. Measurement Location
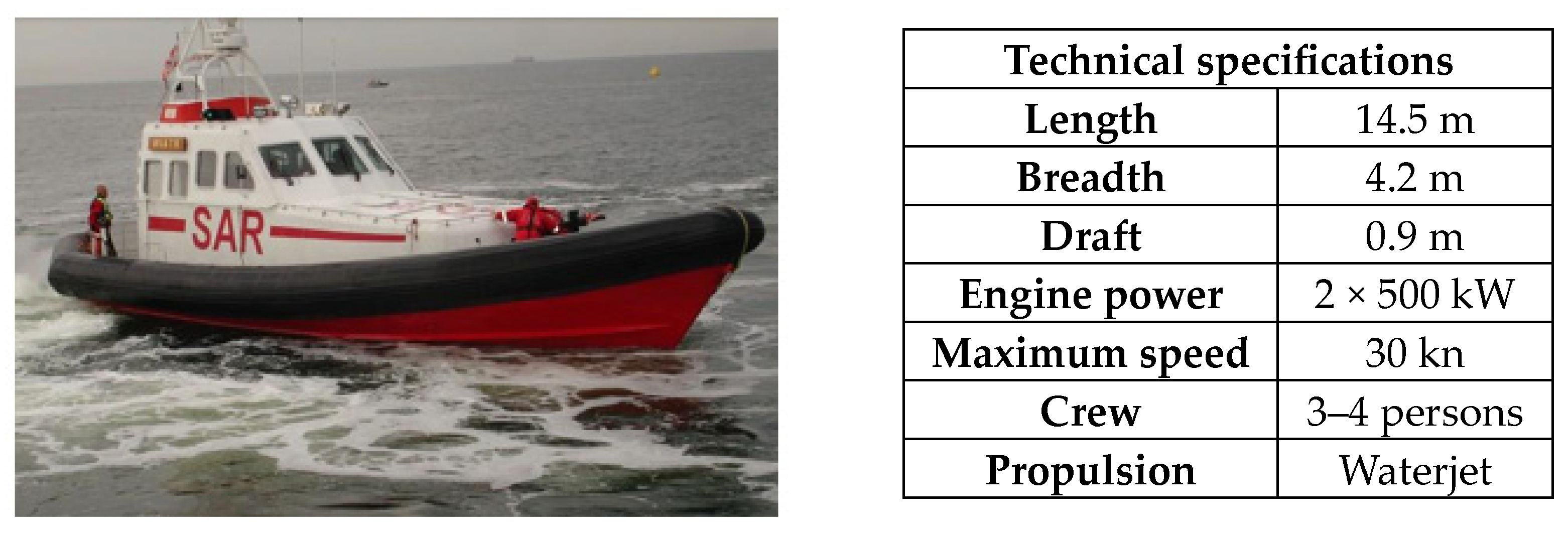
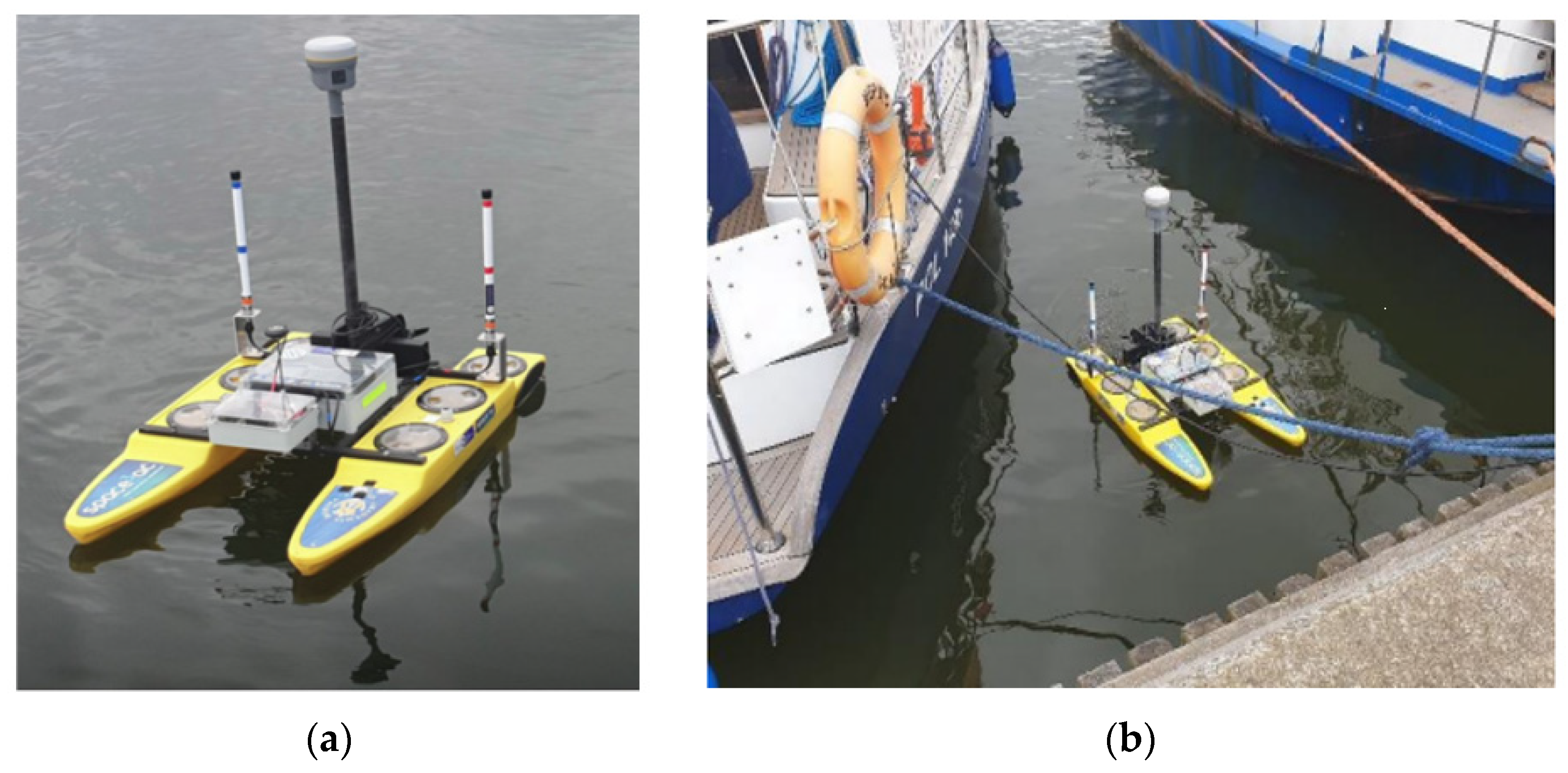
2.2. Measurement Equipment
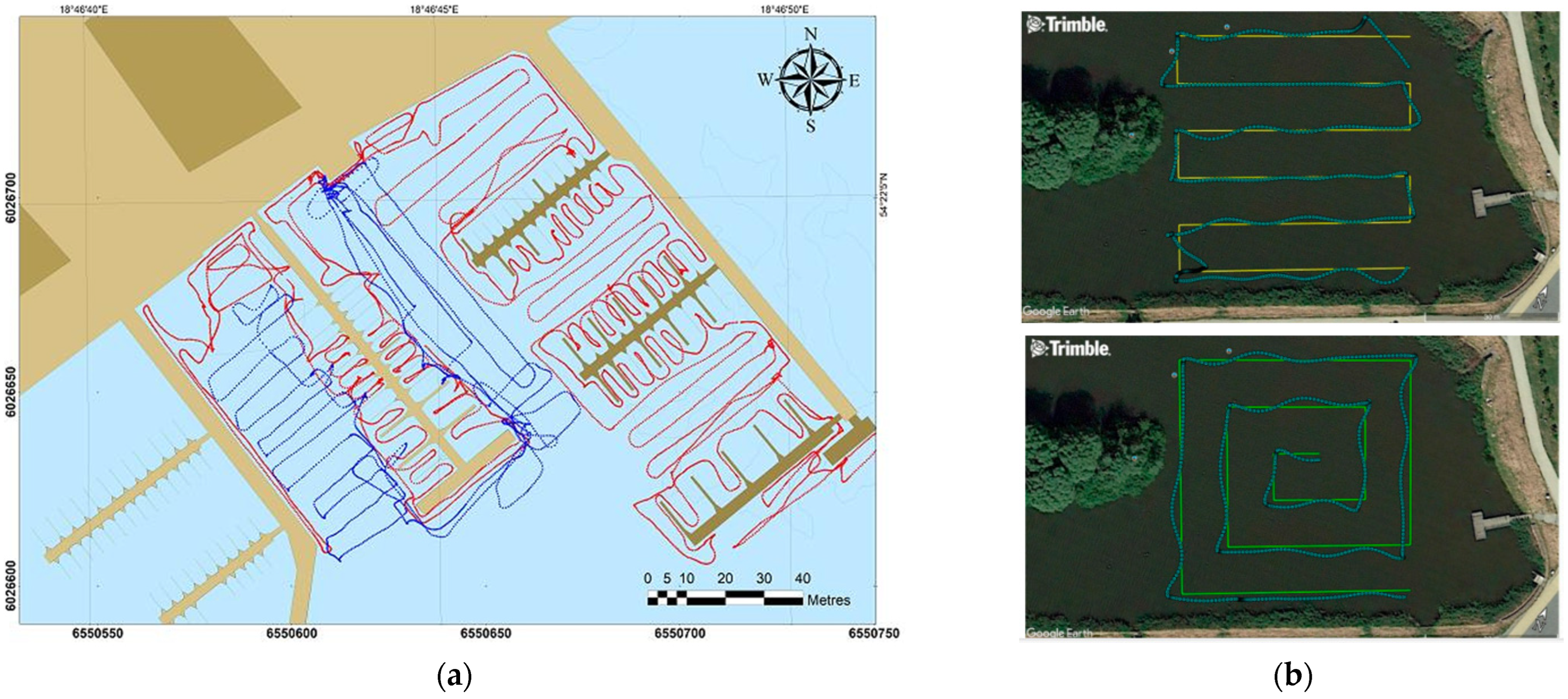
2.3. Realisation of Measurement and Data Processing
- x, y—coordinates in the Gauss–Krüger projection, in the PL 2000 coordinate system applicable in Poland [m];
- φ, λ—geodetic coordinates [°];
- a—6,378,137.000 m—length of the semi-major axis of the WGS–84 ellipsoid;
- e—eccentricity;
- N—radius of curvature perpendicular to the meridian [m];
- M—distance along the meridian from the Equator to latitude φ.
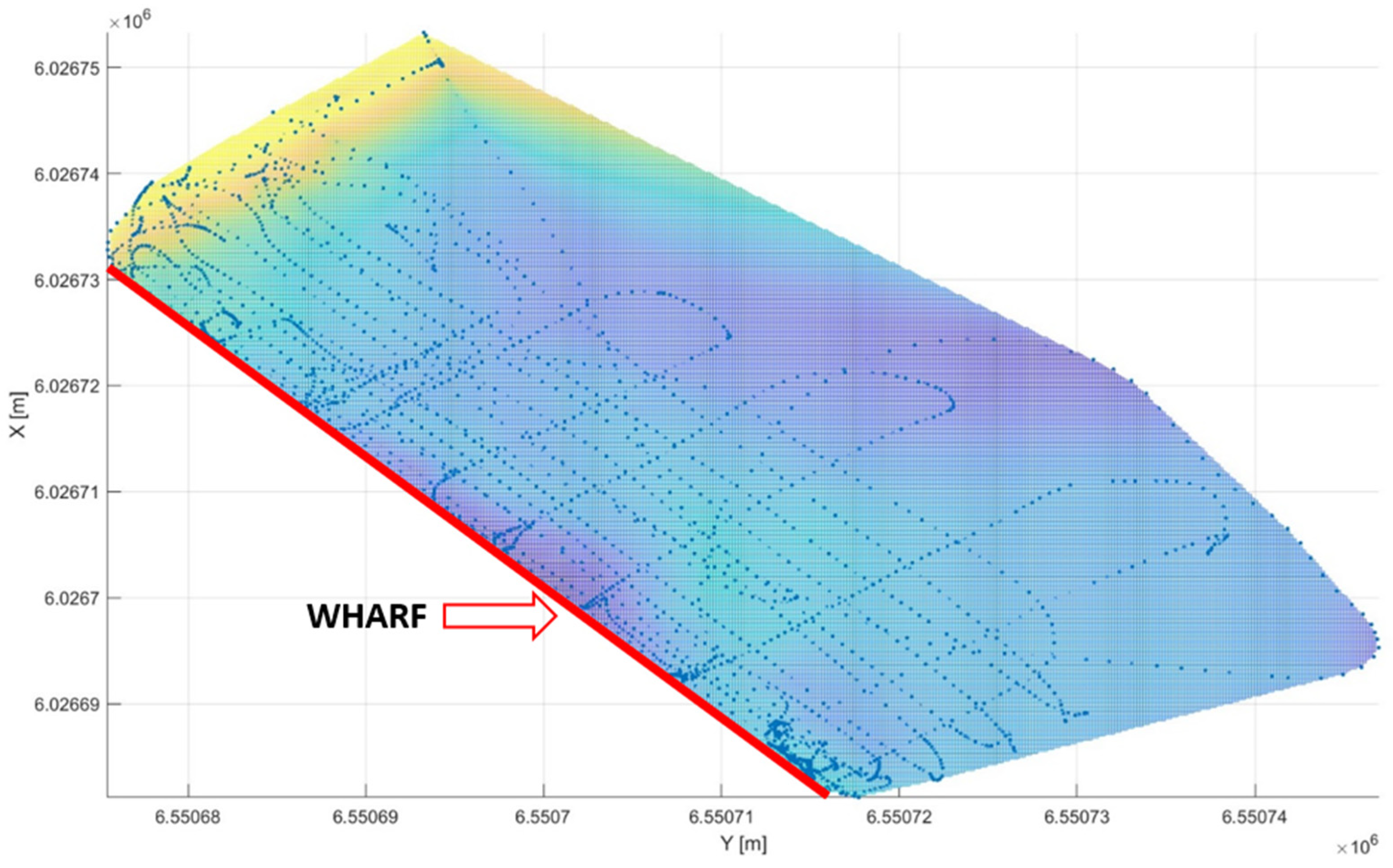
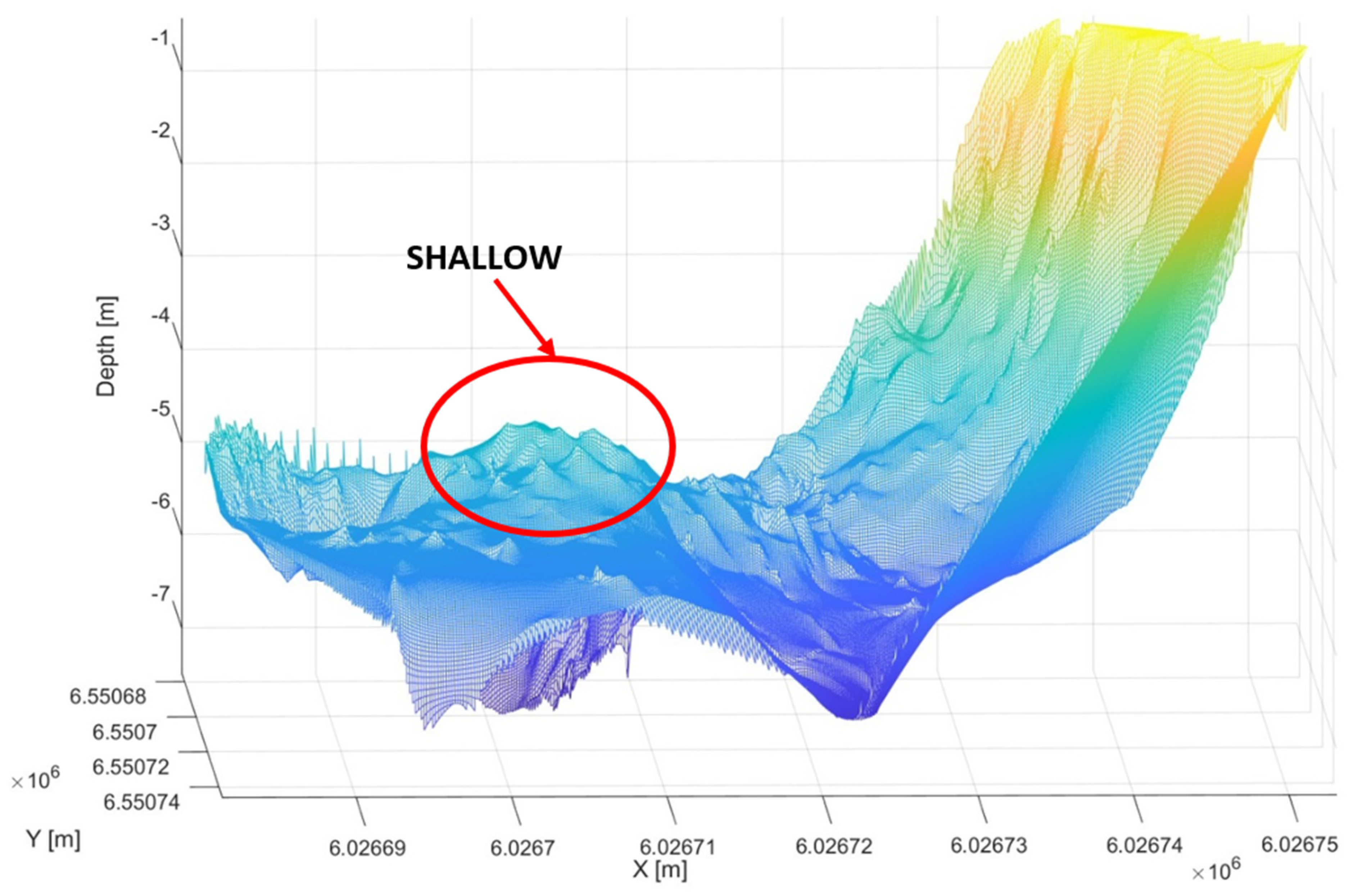
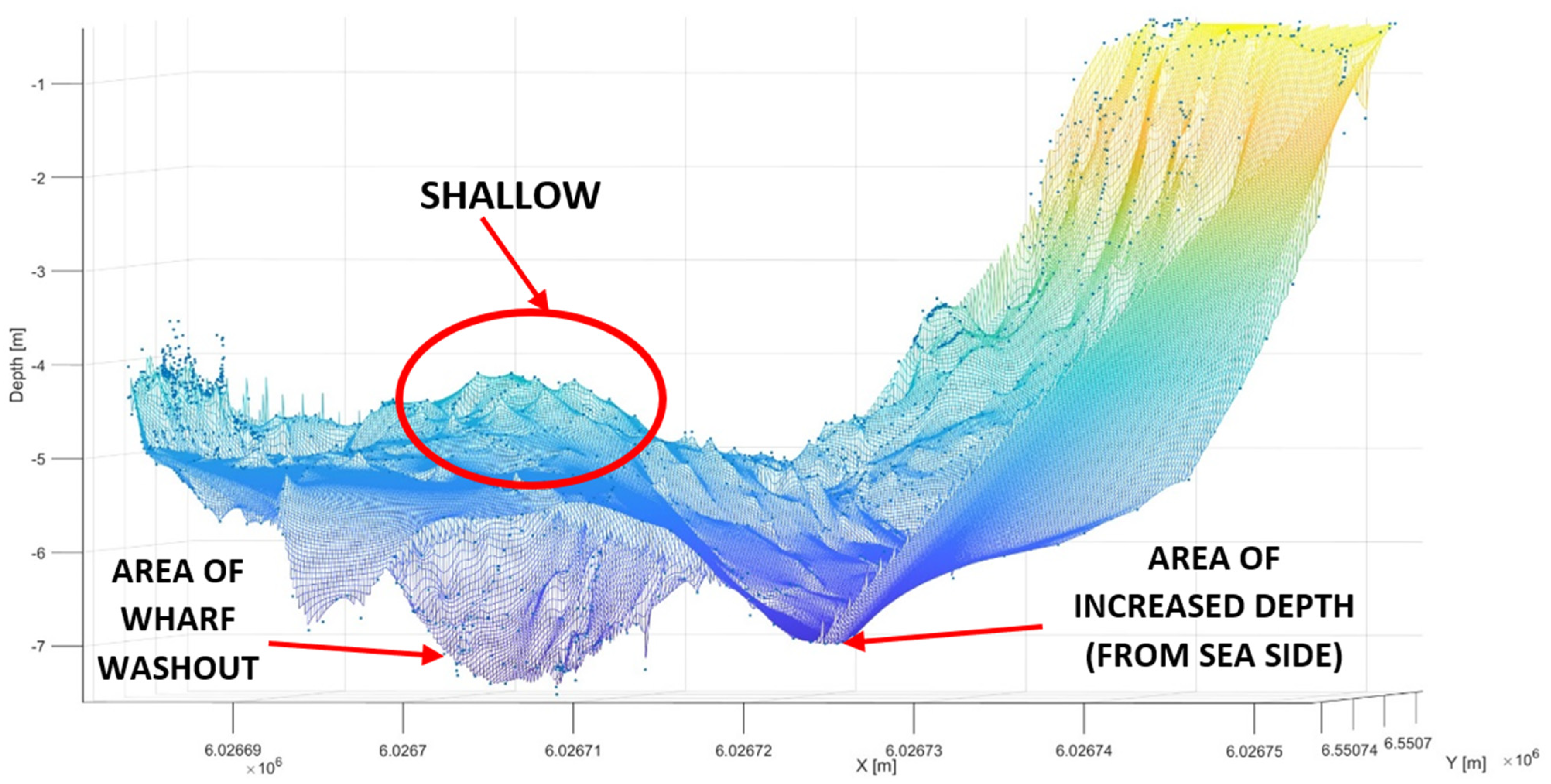
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IHO S-44; IHO Standards for Hydrographic Surveys, 6.1.0 ed. IHO: Monte Carlo, Monaco, 2022.
- Canadian Hydrographic Service. CHS Standards for Hydrographic Surveys, 4th ed.; CHS: Ottawa, ON, Canada, 2021. [Google Scholar]
- Stateczny, A.; Grońska, D.; Motyl, W. Hydrodron—New Step for Professional Hydrography for Restricted Waters. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- National Oceanic and Atmospheric Administration. NOS Hydrographic Surveys Specifications and Deliverables; NOAA: Silver Spring, MD, USA, 2017. [Google Scholar]
- Makar, A.; Specht, C.; Specht, M.; Dąbrowski, P.; Szafran, M. Integrated Geodetic and Hydrographic Measurements of the Yacht Port for Nautical Charts and Dynamic Spatial Presentation. Geosciences 2020, 10, 203. [Google Scholar] [CrossRef]
- Suhari, K.T.; Karim, H.; Gunawan, P.H.; Purwanto, H. Small ROV Marine Boat for Bathymetry Surveys of Shallow Waters—Potential Implementation in Malaysia. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-4/W5, 201–208. [Google Scholar]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating Sensors into a Marine Drone for Bathymetric 3D Surveys in Shallow Waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [PubMed]
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated Survey in Very Shallow Water Using an Unmanned Surface Vehicle. IFAC Pap. 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M. Determination of the Territorial Sea Baseline—Aspect of Using Unmanned Hydrographic Vessels. TransNav. Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 649–654. [Google Scholar] [CrossRef]
- Iwen, D.; Wąż, M. Benefits of using ASV MBES surveys in shallow waters and restricted areas. In Proceedings of the European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019. [Google Scholar]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. ISPRS Int. J. Geo-Inf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned Surface Vehicles: An Overview of Developments and Challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Romano, A.; Duranti, P. Autonomous Unmanned Surface Vessels for Hydrographic Measurement and Environmental Monitoring. In Proceedings of the FIG Working Week 2012, Rome, Italy, 6–10 May 2012. [Google Scholar]
- Offshore Engineer. Available online: https://www.oedigital.com/news/474800-raising-the-pipeline-inspection-game (accessed on 7 July 2024).
- Stateczny, A.; Kazimierski, W.; Gronska-Sledz, D.; Motyl, W. The Empirical Application of Automotive 3D Radar Sensor for Target Detection for an Autonomous Surface Vehicle’s Navigation. Remote Sens. 2019, 11, 1156. [Google Scholar] [CrossRef]
- Kasvi, A.; Salmela, J.; Lotsari, E.; Kumpula, T.; Lane, S.N. Comparison of Remote Sensing Based Approaches for Mapping Bathymetry of Shallow, Clear Water Rivers. Geomorphology 2019, 33, 180–197. [Google Scholar] [CrossRef]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of Trajectory Tracking Based on Nonlinear Guidance Logic for Hydrographic Unmanned Surface Vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef] [PubMed]
- Specht, C.; Makar, A.; Specht, M.; Dąbrowski, P.; Cywiński, P. Bathymetric Charts of the Yacht Port National Sailing Centre the Gdańsk University of Physical Education and Sport; Technical Report; Gdynia Maritime University: Gdynia, Poland, 2020. [Google Scholar]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the Steering Precision of a Hydrographic Unmanned Surface Vessel (USV) along Sounding Profiles Using a Low-cost Multi-Global Navigation Satellite System (GNSS) Receiver Supported Autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef] [PubMed]
- Specht, M.; Stateczny, A.; Specht, C.; Widźgowski, S.; Lewicka, O.; Wiśniewska, M. Concept of an Innovative Autonomous Unmanned System for Bathymetric Monitoring of Shallow Waterbodies (INNOBAT System). Energies 2021, 14, 5370. [Google Scholar] [CrossRef]
- Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. [Google Scholar] [CrossRef]
- Abramowicz-Gerigk, T.; Gerigk, M.K.; Hapke, L.; Tetfejer, K. Cloud-based system for monitoring loads generated on the quay wall by ship propeller jets. Mar. Struct. 2024, 93, 103517. [Google Scholar] [CrossRef]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. MicroVEGA (Micro Vessel for Geodetics Application): A Marine Drone for the Acquisition of Bathymetric Data for GIS Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 123–130. [Google Scholar]
- Misztal, K. Organization and Operation of Seaports, 1st ed.; University of Gdańsk: Gdańsk, Poland, 2010. (In Polish) [Google Scholar]
- Abramowicz-Gerigk, T.; Burciu, Z. Assessment of the Condition of the Bottom Reinforcement System in the Area of Port Quays, Maintenance Problems No. 1; Akademia Morska w Gdyni: Gdynia, Poland, 2011; pp. 7–16. (In Polish) [Google Scholar]
- Magda, W. Marine Construction. Selected Issues with Calculation Examples; PWN Publishing House: Warsaw, Poland, 2022. (In Polish) [Google Scholar]
- SAR. Available online: https://www.sar.gov.pl/pl/equipment/sar1500/ (accessed on 21 May 2024).
- Specht, M.; Specht, C.; Szafran, M.; Makar, A.; Dąbrowski, P.; Lasota, H.; Cywiński, P. The Use of USV to Develop Navigational and Bathymetric Charts of Yacht Ports on the Example of National Sailing Centre in Gdańsk. Remote Sens. 2020, 12, 2585. [Google Scholar] [CrossRef]
- Snyder, J.P. Map Projections—A Working Manual; US Government Printing Office: Washington, DC, USA, 1987; Volume 1395. [Google Scholar]
- Dabrowski, P.S.; Specht, C.; Specht, M.; Makar, A. Three-Dimensional Thematic Map Imaging of the Yacht Port on the Example of the Polish National Sailing Centre Marina in Gdańsk. Appl. Sci. 2021, 11, 7016. [Google Scholar] [CrossRef]
- Cui, S.; Chen, Y.; Li, X. A Robust and Efficient UAV Path Planning Approach for Tracking Agile Targets in Complex Environments. Machines 2022, 10, 931. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | After Modernisation |
|---|---|
| Length | 1.1 m |
| Breadth | 0.7 m |
| Weight | 18 kg |
| Steering | Direct remote controlled, semi-automatic, automatic |
| Operation range of remote control | 1 km (868 MHz) |
| Battery bank | 2 × 22 Ah LiPo (2 × 326 Wh) |
| Operating time on a fully charged battery | 6 h |
| Propulsion | Integrated 2 × 50 N |
| Positioning system | U-blox NEO-M8N: 72 channels, GPS, QZS, GLONASS, BeiDou, SBAS |
| Geodetic GNSS receiver | Trimble R10 |
| Vertical echosounder | SonarMite BTX |
| Ingress protection | IP 56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, C.; Śliwińska, D. Hydrographic Inspection Using a USV of a Harbour Bottom Deepened by the Periodic Actuation of SAR Vessel Propellers. Remote Sens. 2024, 16, 2522. https://doi.org/10.3390/rs16142522
Specht C, Śliwińska D. Hydrographic Inspection Using a USV of a Harbour Bottom Deepened by the Periodic Actuation of SAR Vessel Propellers. Remote Sensing. 2024; 16(14):2522. https://doi.org/10.3390/rs16142522
Chicago/Turabian StyleSpecht, Cezary, and Dominika Śliwińska. 2024. "Hydrographic Inspection Using a USV of a Harbour Bottom Deepened by the Periodic Actuation of SAR Vessel Propellers" Remote Sensing 16, no. 14: 2522. https://doi.org/10.3390/rs16142522
APA StyleSpecht, C., & Śliwińska, D. (2024). Hydrographic Inspection Using a USV of a Harbour Bottom Deepened by the Periodic Actuation of SAR Vessel Propellers. Remote Sensing, 16(14), 2522. https://doi.org/10.3390/rs16142522