
Mapping Debris-Covered Glaciers Using High-Resolution Imagery (GF-2) and Deep Learning Algorithms

 , , , ,
, , , ,  ,
,
Abstract

1. Introduction
2. Data and Methods
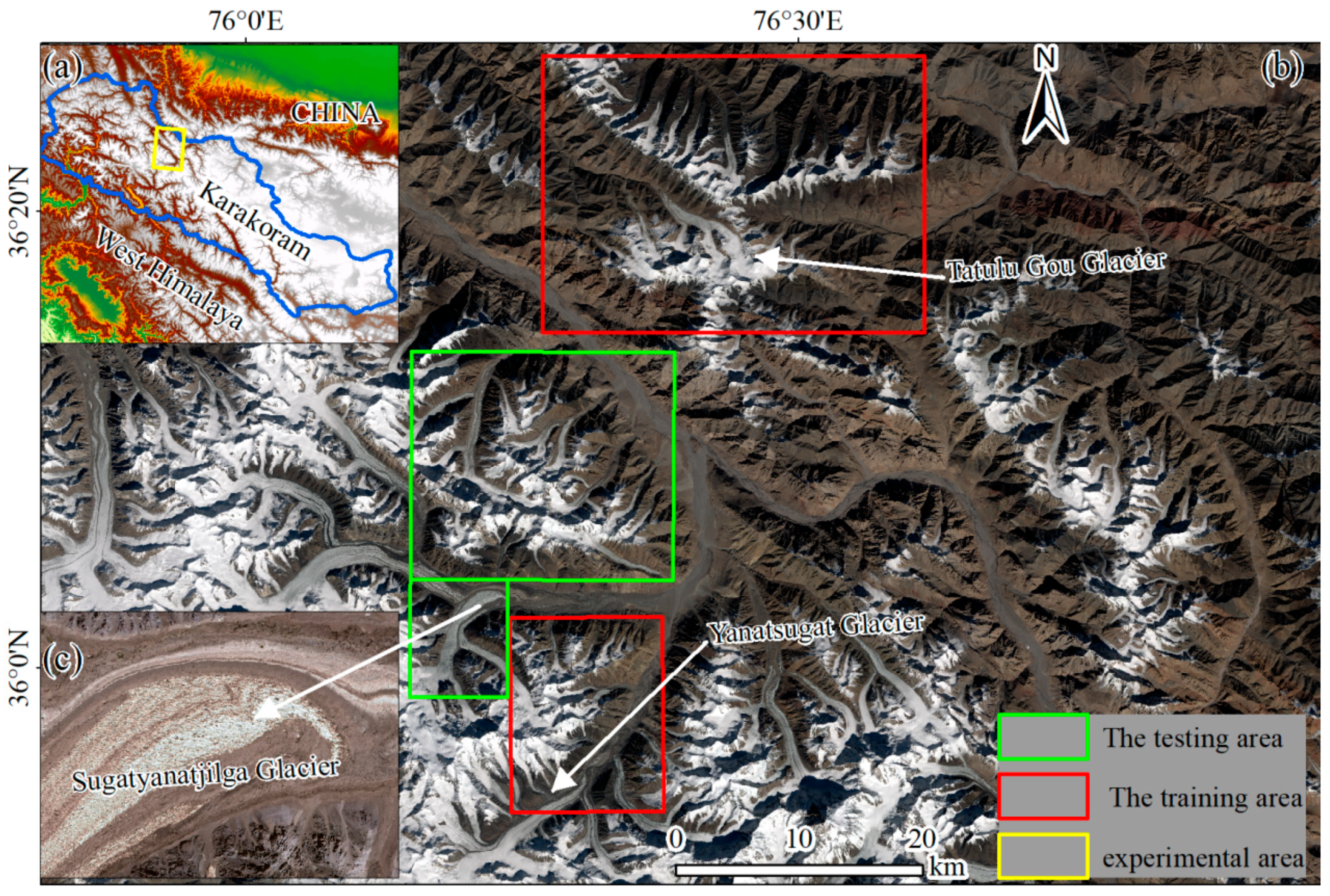
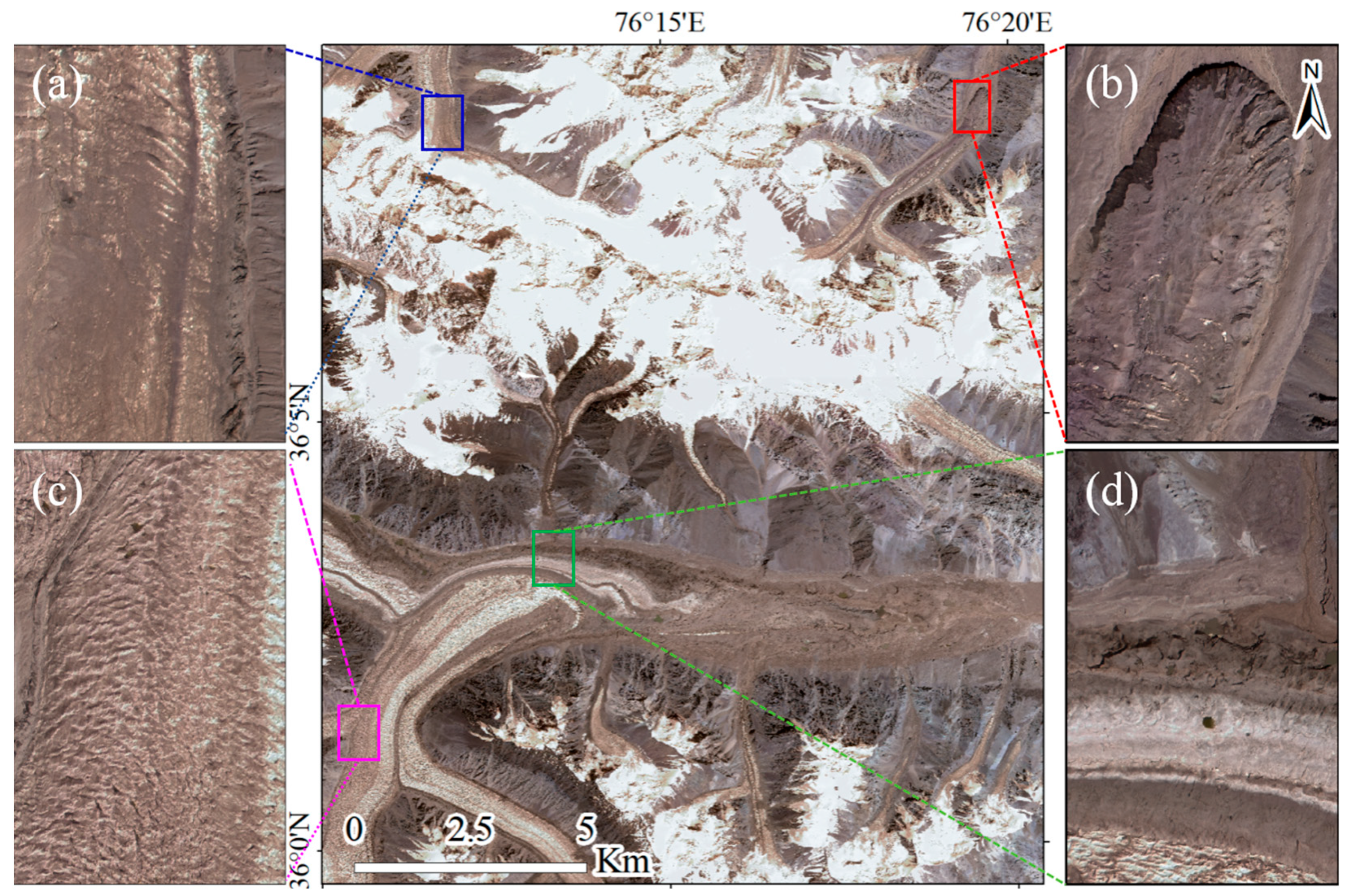
2.1. Study Area
2.2. Datasets
2.2.1. GF-2 Images
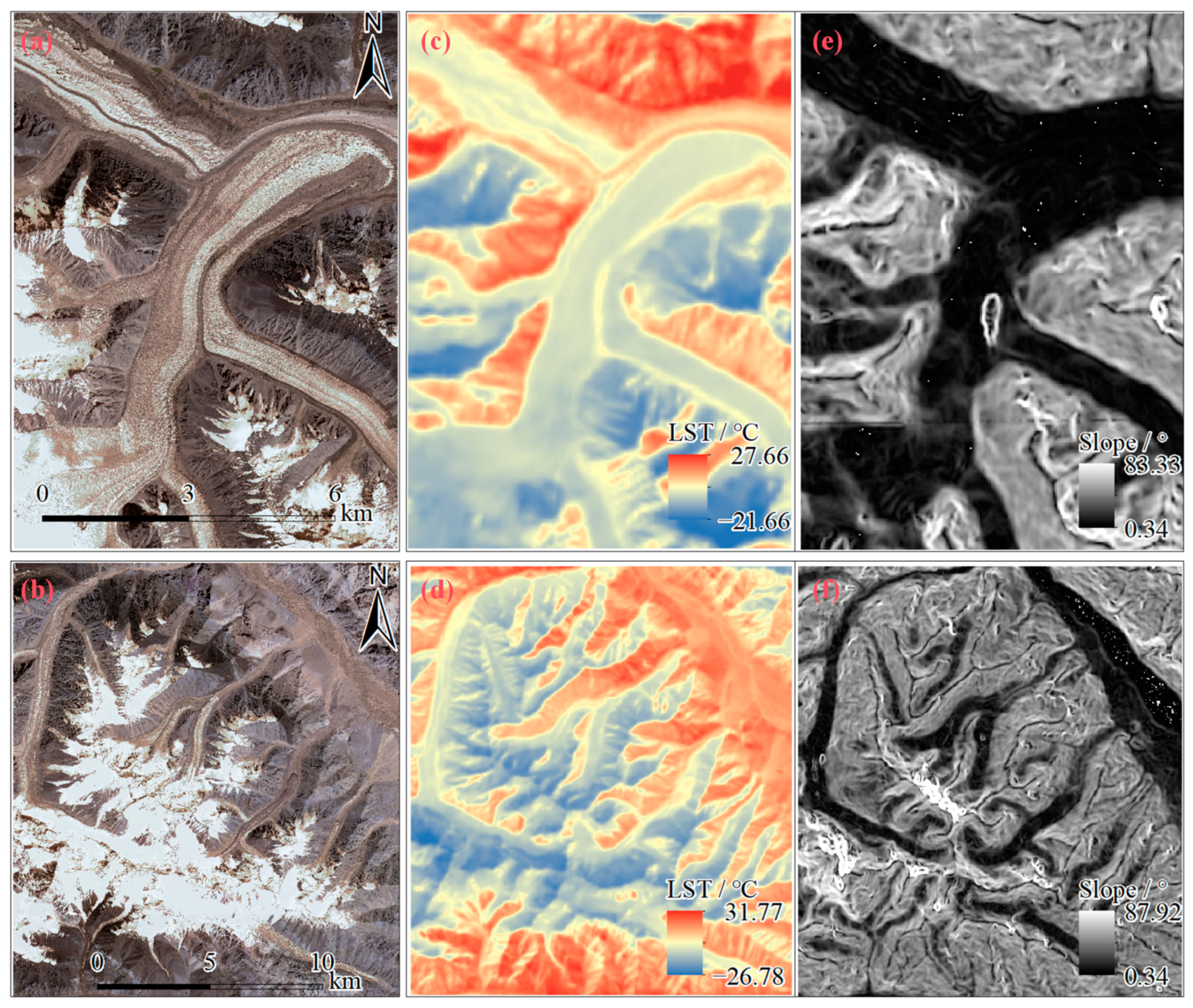
2.2.2. Landsat OLI_TIR Images
2.2.3. ASTER GDEM
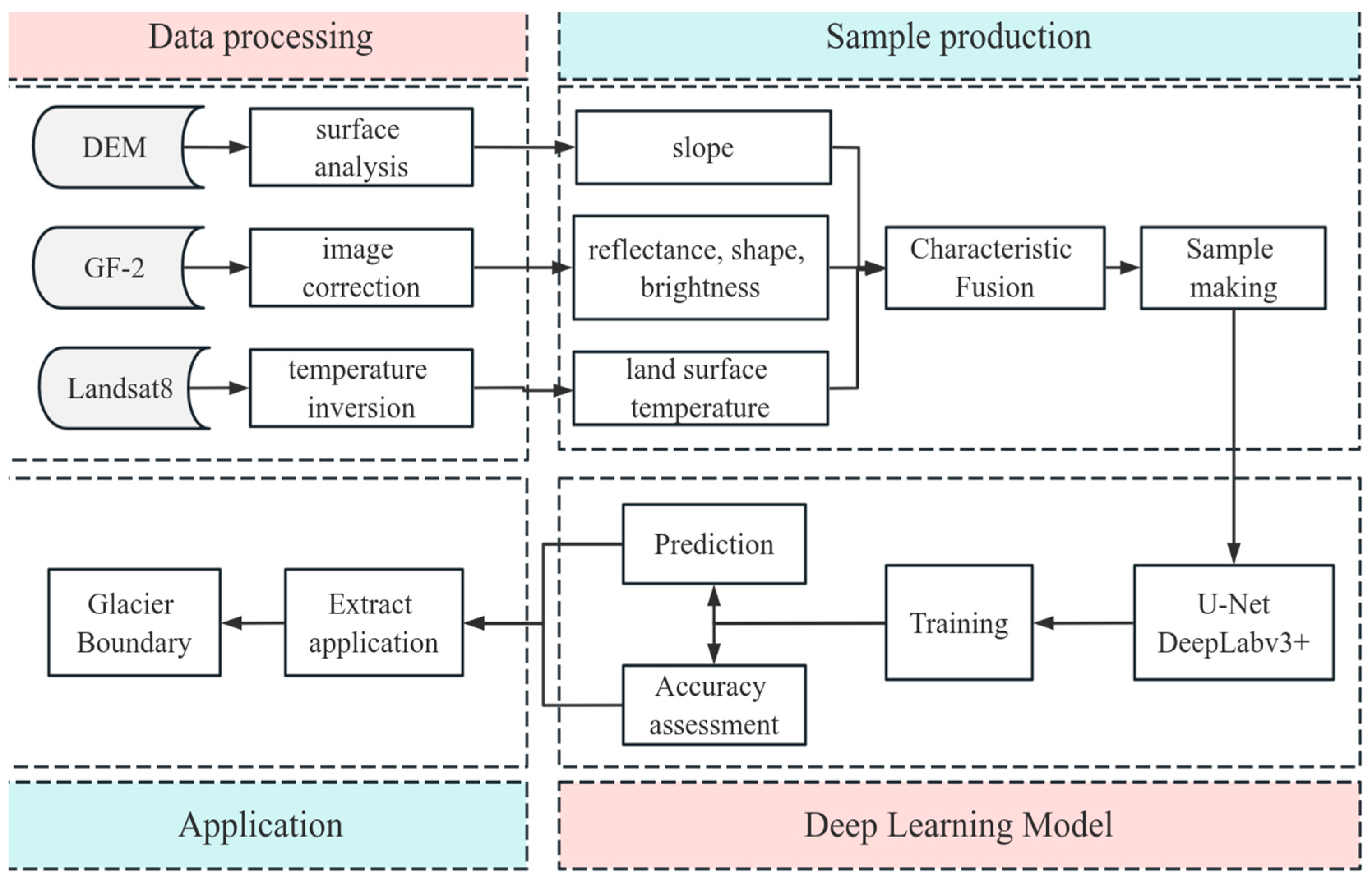
2.3. Algorithm for Mapping Supraglacial Debris
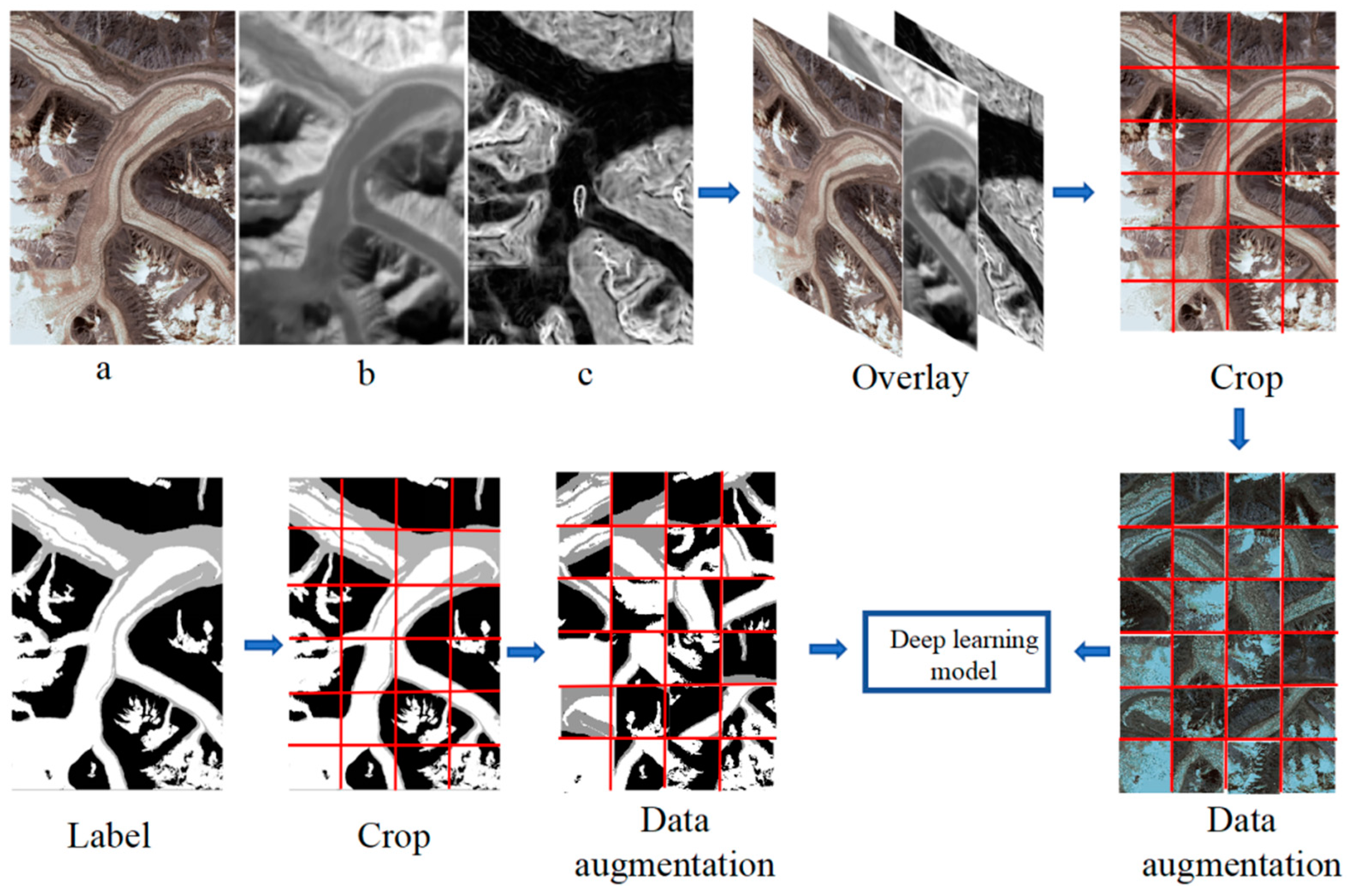
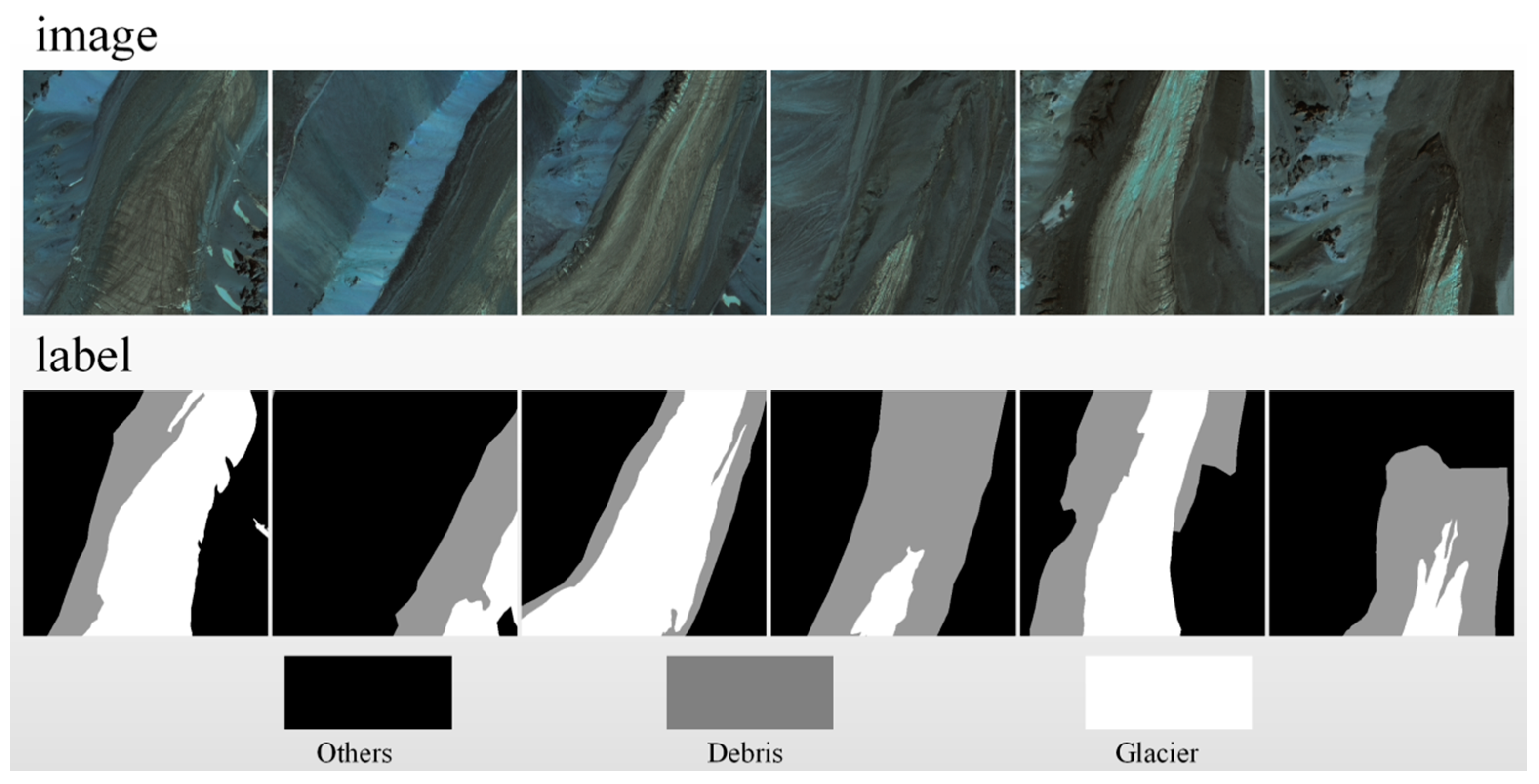
2.3.1. Training Samples
2.3.2. Deep Convolutional Networks
2.3.3. Network Optimization Using CBAM
2.3.4. Model Evaluation Indices
3. Results
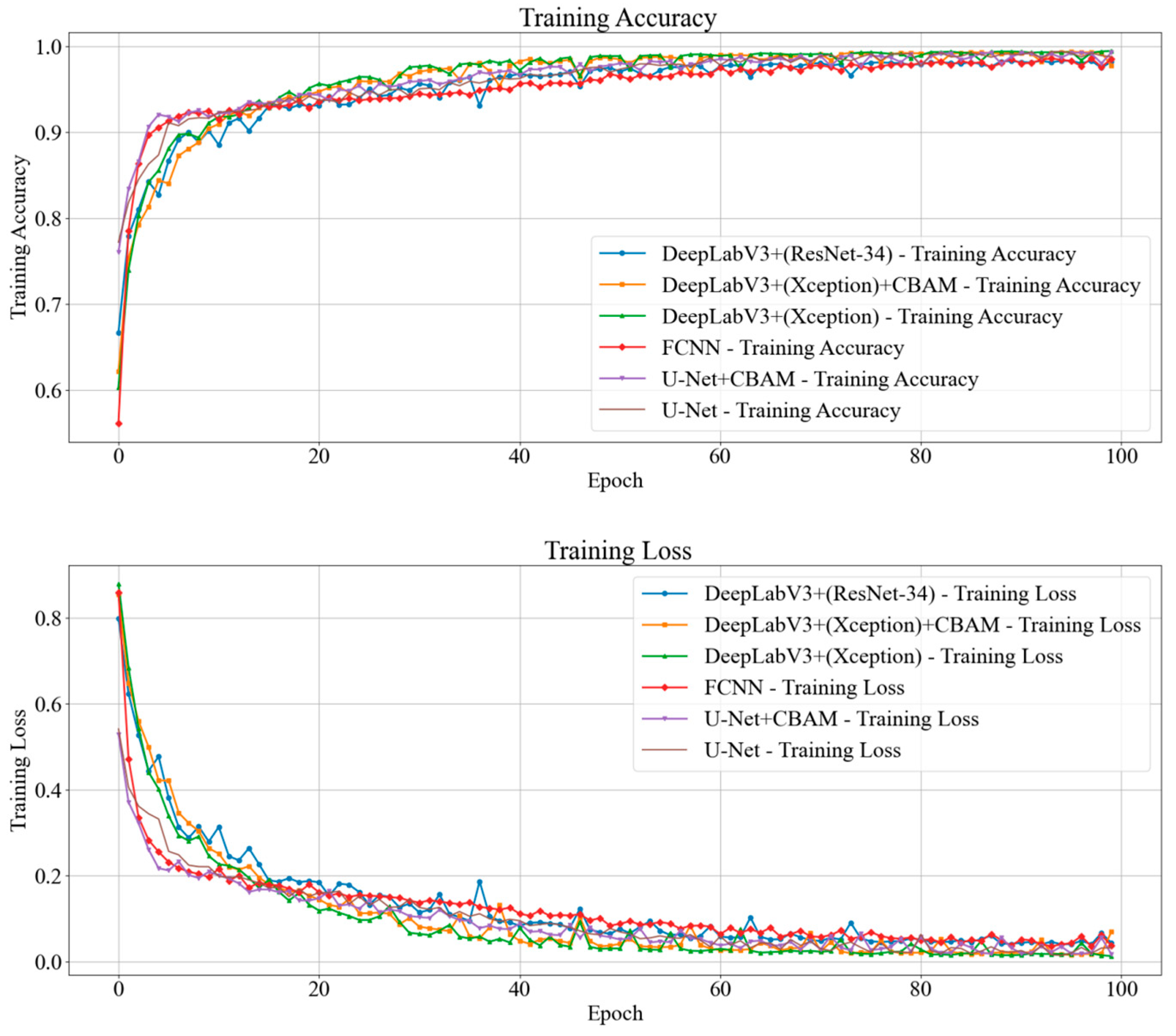
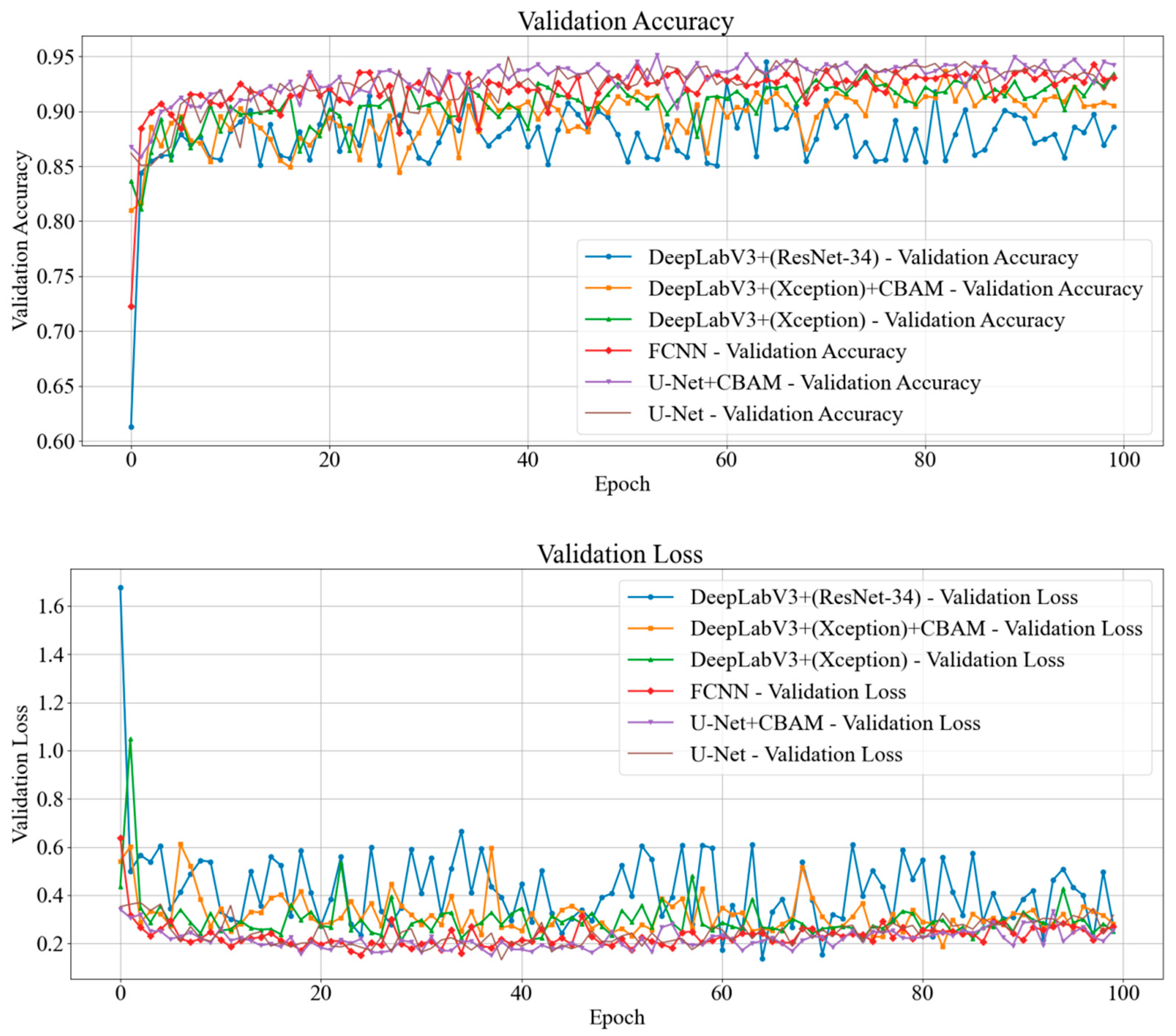
3.1. Experimental Setup
3.2. Accuracy Comparison between Different Models
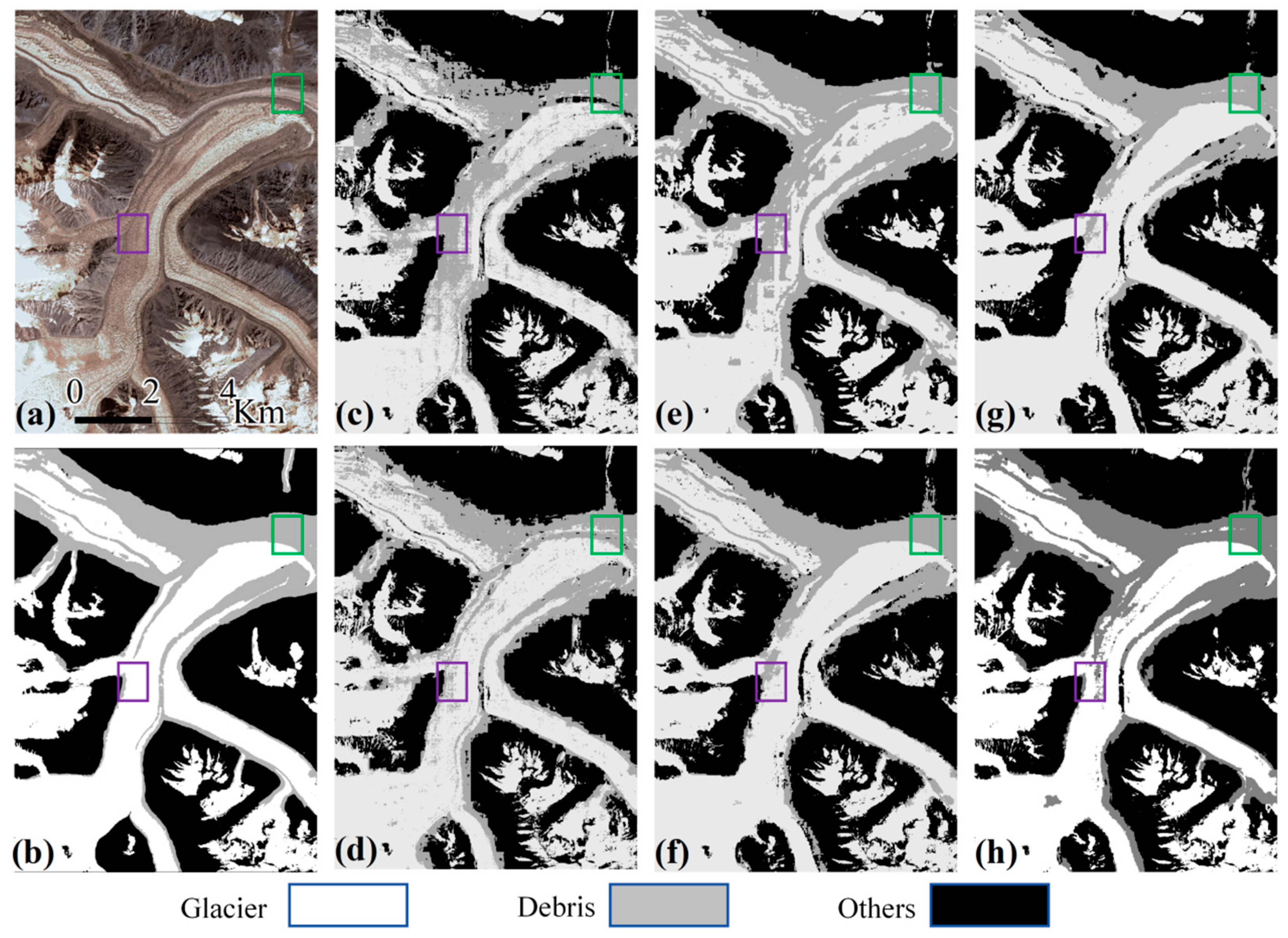
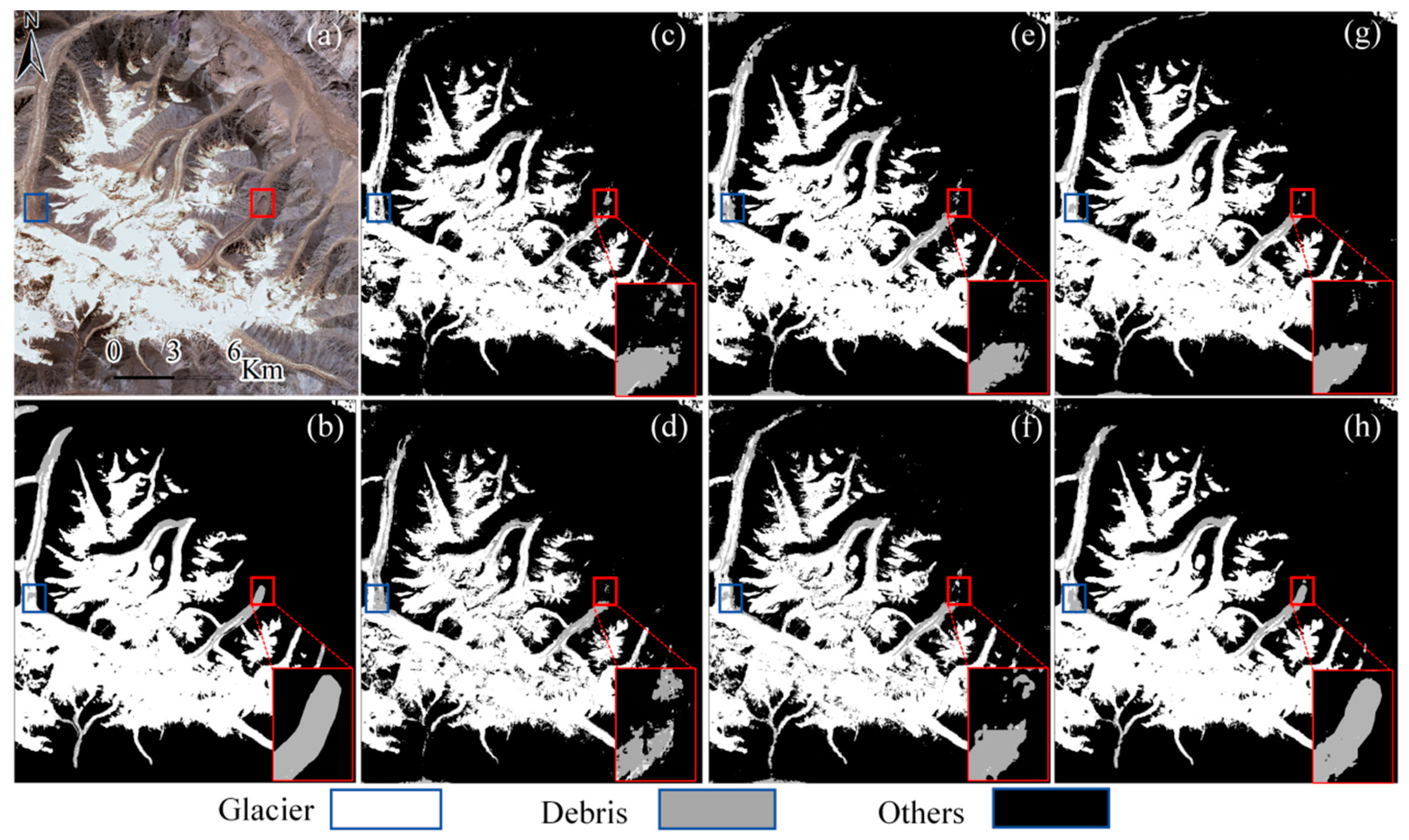
3.3. Mapping of Debris-Covered Glaciers at the Regional Scale
4. Discussion
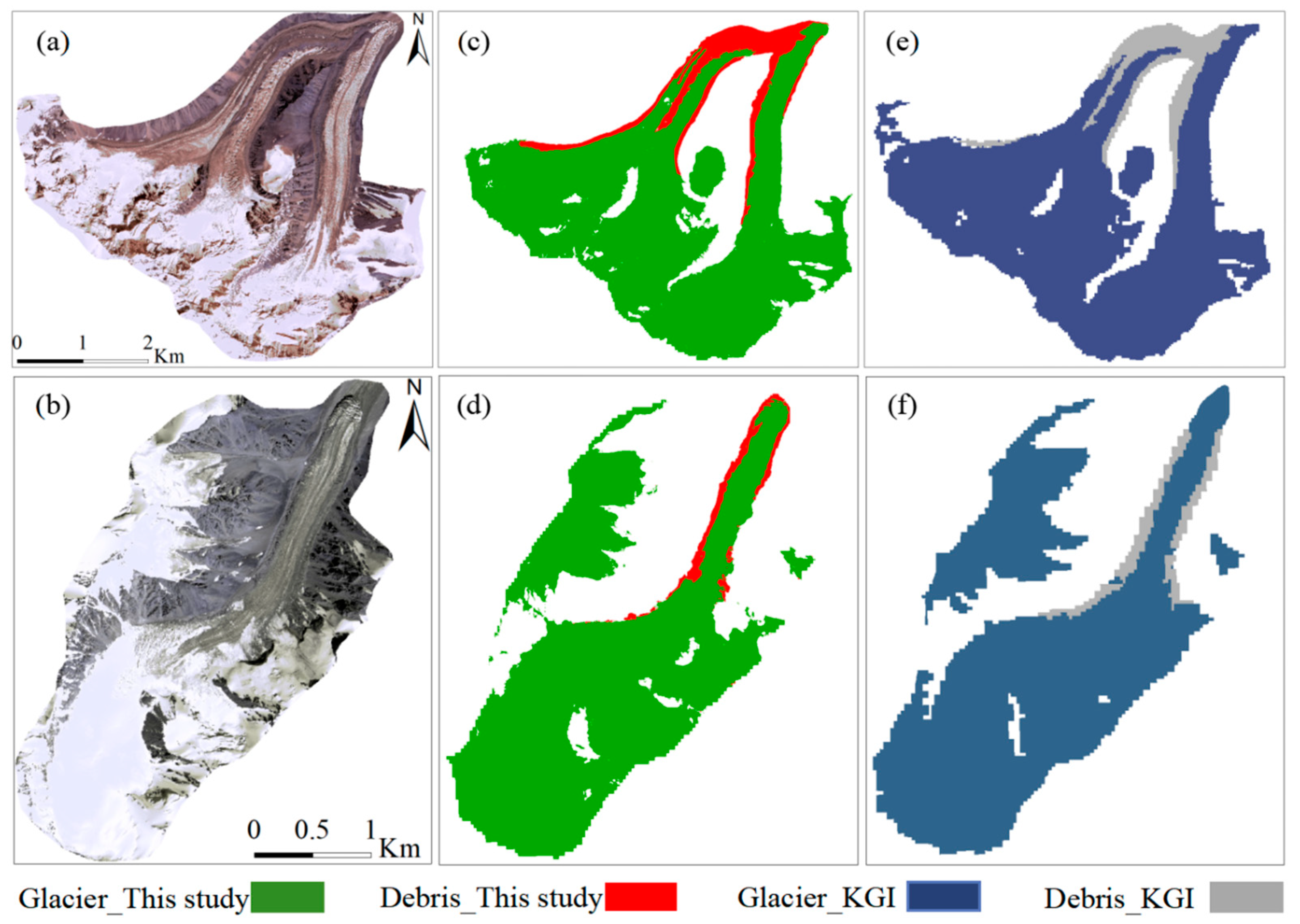
4.1. Comparison with Previous Glacier Outlines
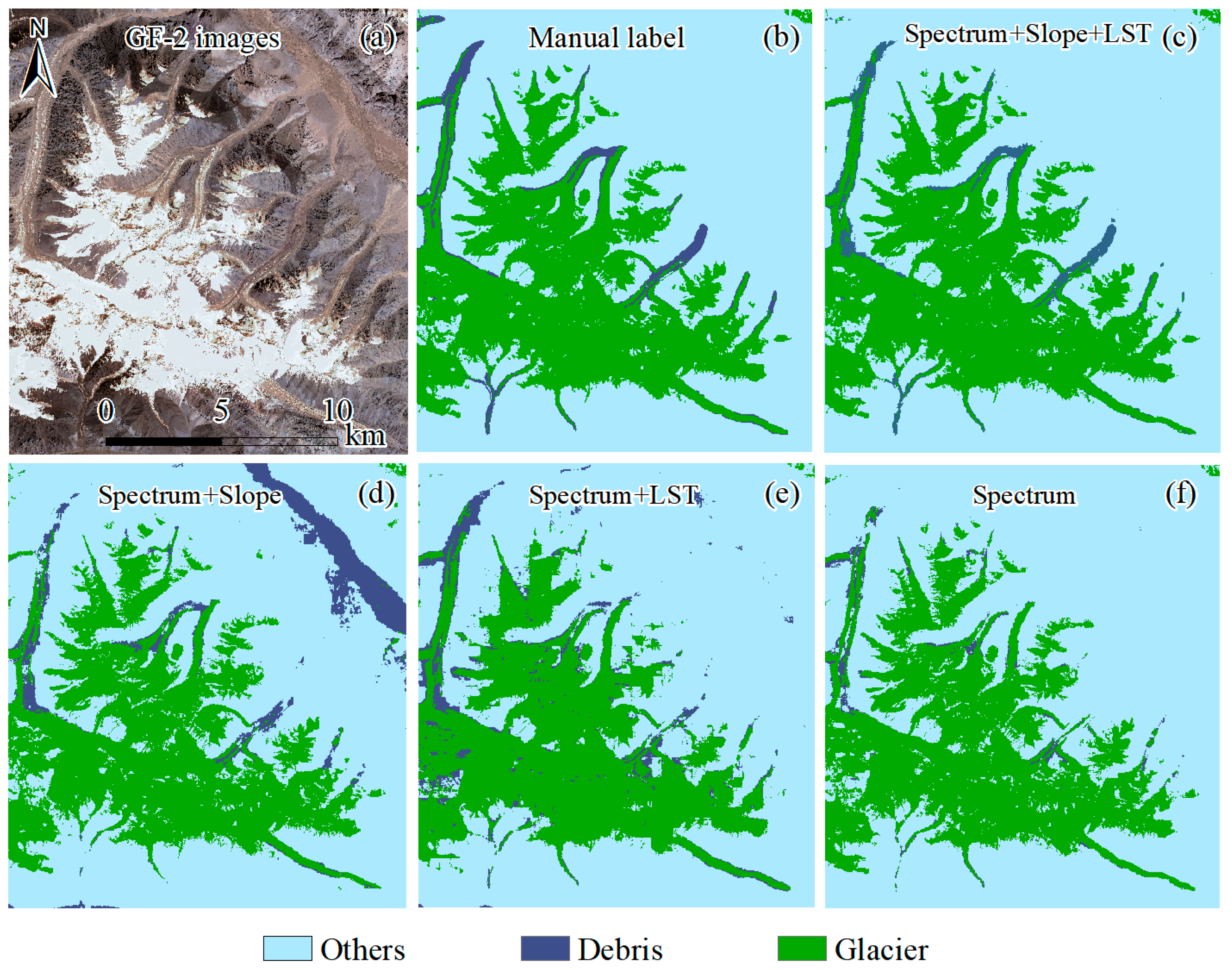
4.2. Effects of Different Feature Combinations on Supraglacial Debris Identification
4.3. Advantages in Debris-Covered Glacier Mapping
5. Conclusions and Prospects
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schaner, N.; Voisin, N.; Nijssen, B.; Lettenmaier, D.P. The contribution of glacier melt to streamflow. Environ. Res. Lett. 2012, 7, 034029. [Google Scholar] [CrossRef]
- Shen, Y.; Su, H.; Wang, G.; Mao, W.; Wang, S.; Han, P.; Wang, N.; Li, Z. The Responses of Glaciers and Snow Cover to Climate Change in Xinjiang (II): Hazards Effects. J. Glaciol. Geocryol. 2013, 35, 1355–1370. [Google Scholar]
- Hotaling, S.; Hood, E.; Hamilton, T.L. Microbial ecology of mountain glacier ecosystems: Biodiversity, ecological connections and implications of a warming climate. Environ. Microbiol. 2017, 19, 2935–2948. [Google Scholar] [CrossRef] [PubMed]
- King, M.A.; Bingham, R.J.; Moore, P.; Whitehouse, P.L.; Bentley, M.J.; Milne, G.A. Lower satellite-gravimetry estimates of Antarctic sea-level contribution. Nature 2012, 491, 586–589. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wilson, C.; Tapley, B. Contribution of ice sheet and mountain glacier melt to recent sea level rise. Nat. Geosci. 2013, 6, 549–552. [Google Scholar] [CrossRef]
- Grinsted, A. An estimate of global glacier volume. Cryosphere 2013, 7, 141–151. [Google Scholar] [CrossRef]
- Zemp, M.; Huss, M.; Thibert, E.; Eckert, N.; McNabb, R.; Huber, J.; Barandun, M.; Machguth, H.; Nussbaumer, S.U.; Gärtner-Roer, I. Global glacier mass changes and their contributions to sea-level rise from 1961 to 2016. Nature 2019, 568, 382–386. [Google Scholar] [CrossRef] [PubMed]
- Masson-Delmotte, Valérie, et al. Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change. 2021, Volume 2, p. 2391. Available online: https://www.ipcc.ch/report/ar6/wg1/ (accessed on 3 June 2024).
- Sattar, A.; Haritashya, U.K.; Kargel, J.S.; Leonard, G.J.; Shugar, D.H.; Chase, D.V. Modeling lake outburst and downstream hazard assessment of the Lower Barun Glacial Lake, Nepal Himalaya. J. Hydrol. 2021, 598, 126208. [Google Scholar] [CrossRef]
- Kirkbride, M.P.; Deline, P. The formation of supraglacial debris covers by primary dispersal from transverse englacial debris bands. Earth Surf. Process. Landf. 2013, 38, 1779–1792. [Google Scholar] [CrossRef]
- Nagai, H.; Fujita, K.; Nuimura, T.; Sakai, A. Southwest-facing slopes control the formation of debris-covered glaciers in the Bhutan Himalaya. Cryosphere 2013, 7, 1303–1314. [Google Scholar] [CrossRef]
- Benn, D.; Evans, D.J. Glaciers and Glaciation; Routledge: New York, NY, USA, 2014. [Google Scholar]
- Benn, D.I.; Owen, L.A. Himalayan glacial sedimentary environments: A framework for reconstructing and dating the former extent of glaciers in high mountains. Quat. Int. 2002, 97, 3–25. [Google Scholar] [CrossRef]
- Scherler, D.; Bookhagen, B.; Strecker, M.R. Spatially variable response of Himalayan glaciers to climate change affected by debris cover. Nat. Geosci. 2011, 4, 156–159. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, S. Research progress on debris thickness estimation and its effect on debris-covered glaciers in western China. Acta Geogr. Sin. 2017, 72, 1606–1620. [Google Scholar]
- Mölg, N.; Bolch, T.; Rastner, P.; Strozzi, T.; Paul, F. A consistent glacier inventory for Karakoram and Pamir derived from Landsat data: Distribution of debris cover and mapping challenges. Earth Syst. Sci. Data 2018, 10, 1807–1827. [Google Scholar] [CrossRef]
- Xie, F.; Liu, S.; Gao, Y.; Zhu, Y.; Bolch, T.; Kääb, A.; Duan, S.; Miao, W.; Kang, J.; Zhang, Y.; et al. Interdecadal glacier inventories in the Karakoram since the 1990s. Earth Syst. Sci. Data 2023, 15, 847–867. [Google Scholar] [CrossRef]
- Paul, F.; Huggel, C.; Kääb, A. Combining satellite multispectral image data and a digital elevation model for mapping debris-covered glaciers. Remote Sens. Environ. 2004, 89, 510–518. [Google Scholar] [CrossRef]
- Shukla, A.; Arora, M.; Gupta, R. Synergistic approach for mapping debris-covered glaciers using optical–thermal remote sensing data with inputs from geomorphometric parameters. Remote Sens. Environ. 2010, 114, 1378–1387. [Google Scholar] [CrossRef]
- Yan, L.; Wang, J. Study of Extracting Glacier Information from Remote Sensing. J. Glaciol. Geocryol. 2013, 35, 110–118. [Google Scholar]
- Shangguan, D.; Liu, S.; Ding, Y.; Ding, L.; Li, G. Glacier Changes at the Head of Yurungkax River in the West Kunlun Mountains in the Past 32 Years. Acta Geogr. Sin. 2004, 59, 855–862. [Google Scholar]
- Walter, V. Object-based classification of remote sensing data for change detection. ISPRS J. Photogramm. Remote Sens. 2004, 58, 225–238. [Google Scholar] [CrossRef]
- Paul, F.; Barry, R.G.; Cogley, J.G.; Frey, H.; Haeberli, W.; Ohmura, A.; Ommanney, C.S.L.; Raup, B.; Rivera, A.; Zemp, M. Recommendations for the compilation of glacier inventory data from digital sources. Ann. Glaciol. 2009, 50, 119–126. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z.; Tian, B.-S.; Chen, Q.; Liu, J.-L.; Zhang, R. Classification and snow line detection for glacial areas using the polarimetric SAR image. Remote Sens. Environ. 2011, 115, 1721–1732. [Google Scholar] [CrossRef]
- Xie, F.; Liu, S.; Wu, K.; Zhu, Y.; Gao, Y.; Qi, M.; Duan, S.; Saifullah, M.; Tahir, A.A. Upward expansion of supra-glacial debris cover in the Hunza Valley, Karakoram, during 1990∼2019. Front. Earth Sci. 2020, 8, 308. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, Z.; Shangguan, D.; Yang, J. Novel machine learning method integrating ensemble learning and deep learning for mapping debris-covered glaciers. Remote Sens. 2021, 13, 2595. [Google Scholar] [CrossRef]
- Xie, Z.; Asari, V.K.; Haritashya, U.K. Evaluating deep-learning models for debris-covered glacier mapping. Appl. Comput. Geosci. 2021, 12, 100071. [Google Scholar] [CrossRef]
- Kaushik, S.; Singh, T.; Bhardwaj, A.; Joshi, P.K.; Dietz, A.J. Automated Delineation of Supraglacial Debris Cover Using Deep Learning and Multisource Remote Sensing Data. Remote Sens. 2022, 14, 1352. [Google Scholar] [CrossRef]
- Peng, Y.; He, J.; Yuan, Q.; Wang, S.; Chu, X.; Zhang, L. Automated glacier extraction using a Transformer based deep learning approach from multi-sensor remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2023, 202, 303–313. [Google Scholar] [CrossRef]
- Thomas, D.J.; Robson, B.A.; Racoviteanu, A.E. An integrated deep learning andobject-based image analysis approach for mapping debris-covered glaciers. Front. Remote Sens. 2023, 4, 1161530. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III. Springer: Berlin/Heidelberg, Germany, 2015; Volume 18, pp. 234–241. [Google Scholar]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Baumhoer, C.A.; Dietz, A.J.; Kneisel, C.; Kuenzer, C. Automated Extraction of Antarctic Glacier and Ice Shelf Fronts from Sentinel-1 Imagery Using Deep Learning. Remote Sens. 2019, 11, 2529. [Google Scholar] [CrossRef]
- Robson, B.A.; Bolch, T.; MacDonell, S.; Hölbling, D.; Rastner, P.; Schaffer, N. Automated detection of rock glaciers using deep learning and object-based image analysis. Remote Sens. Environ. 2020, 250, 112033. [Google Scholar] [CrossRef]
- Xie, Z.; Haritashya, U.K.; Asari, V.K.; Young, B.W.; Bishop, M.P.; Kargel, J.S. GlacierNet: A deep-learning approach for debris-covered glacier mapping. IEEE Access 2020, 8, 83495–83510. [Google Scholar] [CrossRef]
- Chu, X.; Yao, X.; Duan, H.; Chen, C.; Li, J.; Pang, W. Glacier extraction based on high-spatial-resolution remote-sensing images using a deep-learning approach with attention mechanism. Cryosphere 2022, 16, 4273–4289. [Google Scholar] [CrossRef]
- Mitkari, K.V.; Arora, M.K.; Tiwari, R.K.; Sofat, S.; Gusain, H.S.; Tiwari, S.P. Large-scale debris cover glacier mapping using multisource object-based image analysis approach. Remote Sens. 2022, 14, 3202. [Google Scholar] [CrossRef]
- Selbesoğlu, M.O.; Bakirman, T.; Vassilev, O.; Ozsoy, B. Mapping of Glaciers on Horseshoe Island, Antarctic Peninsula, with Deep Learning Based on High-Resolution Orthophoto. Drones 2023, 7, 72. [Google Scholar] [CrossRef]
- Shukla, A.; Ali, I. A hierarchical knowledge-based classification for glacier terrain mapping: A case study from Kolahoi Glacier, Kashmir Himalaya. Ann. Glaciol. 2016, 57, 1–10. [Google Scholar] [CrossRef]
- Khan, A.A.; Jamil, A.; Hussain, D.; Taj, M.; Jabeen, G.; Malik, M.K. Machine-learning algorithms for mapping debris-covered glaciers: The Hunza Basin case study. IEEE Access 2020, 8, 12725–12734. [Google Scholar] [CrossRef]
- Xue, J.; Yao, X.; Zhang, C.; Zhou, S.; Chu, X. Extraction method and change of debris-covered glaciers. J. Glaciol. Geocryol. 2022, 44, 1653–1664. [Google Scholar]
- Mitkari, K.V.; Arora, M.K.; Tiwari, R.K. Extraction of Glacial Lakes in Gangotri Glacier Using Object-Based Image Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5275–5283. [Google Scholar] [CrossRef]
- Jawak, S.D.; Wankhede, S.F.; Luis, A.J. Exploration of Glacier Surface Facies Mapping Techniques Using Very High Resolution Worldview-2 Satellite Data. Proceedings 2018, 2, 339. [Google Scholar]
- Jawak, S.D.; Wankhede, S.F.; Luis, A.J. Explorative Study on Mapping Surface Facies of Selected Glaciers from Chandra Basin, Himalaya Using WorldView-2 Data. Remote Sens. 2019, 11, 1207. [Google Scholar] [CrossRef]
- Bolch, T.; Menounos, B.; Wheate, R. Landsat-based inventory of glaciers in western Canada, 1985–2005. Remote Sens. Environ. 2010, 114, 127–137. [Google Scholar] [CrossRef]
- Bolch, T.; Kamp, U. Glacier mapping in high mountains using DEMs, Landsat and ASTER data. Grazer Schriften Geogr. Raumforsch. 2006, 43, 13. [Google Scholar]
- Sun, W.; Zhou, J.; Meng, X.; Yang, G.; Ren, K.; Peng, J. Coupled Temporal Variation Information Estimation and Resolution Enhancement for Remote Sensing Spatial–Temporal–Spectral Fusion. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–18. [Google Scholar]
- Hewitt, K. The Karakoram anomaly? Glacier expansion and the ‘elevation effect’, Karakoram Himalaya. Mt. Res. Dev. 2005, 25, 332–340. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, S.; Wang, X. Debris-cover effect in the Tibetan Plateau and surroundings: A review. J. Glaciol. Geocryol. 2022, 44, 900–913. [Google Scholar]
- Aguilar, M.A.; del Mar Saldaña, M.; Aguilar, F.J. Assessing geometric accuracy of the orthorectification process from GeoEye-1 and WorldView-2 panchromatic images. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 427–435. [Google Scholar] [CrossRef]
- Bernstein, L.S.; Adler-Golden, S.M.; Sundberg, R.L.; Levine, R.Y.; Perkins, T.C.; Berk, A.; Ratkowski, A.J.; Felde, G.W.; Hoke, M.L. A new method for atmospheric correction and aerosol optical property retrieval for VIS-SWIR multi-and hyperspectral imaging sensors: QUAC (QUick Atmospheric Correction). In Proceedings of the International Geoscience and Remote Sensing Symposium, Seoul, Republic of Korea, 25–29 July 2005; p. 3549. [Google Scholar]
- Sun, W.; Chen, B.; Messinger, D.W. Nearest-neighbor diffusion-based pan-sharpening algorithm for spectral images. Opt. Eng. 2014, 53, 013107. [Google Scholar] [CrossRef]
- Cook, M.; Schott, J.R.; Mandel, J.; Raqueno, N. Development of an operational calibration methodology for the Landsat thermal data archive and initial testing of the atmospheric compensation component of a Land Surface Temperature (LST) Product from the archive. Remote Sens. 2014, 6, 11244–11266. [Google Scholar] [CrossRef]
- Yu, X.; Guo, X.; Wu, Z. Land surface temperature retrieval from Landsat 8 TIRS—Comparison between radiative transfer equation-based method, split window algorithm and single channel method. Remote Sens. 2014, 6, 9829–9852. [Google Scholar] [CrossRef]
- Malakar, N.K.; Hulley, G.C.; Hook, S.J.; Laraby, K.; Cook, M.; Schott, J.R. An operational land surface temperature product for Landsat thermal data: Methodology and validation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5717–5735. [Google Scholar] [CrossRef]
- Rukundo, O.; Cao, H. Nearest neighbor value interpolation. arXiv 2012, arXiv:1211.1768. [Google Scholar]
- Ye, J.; Qiu, X.; Huang, Y.; Zhang, C. Resampling interpolation methods of meteorological remote sensing image and grid point field. Comput. Eng. Appl. 2013, 49, 237–241. [Google Scholar]
- Bai, J.; Liu, S.; Hu, G. Inversion and verification of land surface temperature with remote sensing TM/ETM+ data. Trans. Chin. Soc. Agric. Eng. 2008, 24, 148–154. [Google Scholar]
- Ali, S.A.; Parvin, F.; Ahmad, A. Retrieval of land surface temperature from Landsat 8 OLI and TIRS: A comparative analysis between radiative transfer equation-based method and split-window algorithm. Remote Sens. Earth Syst. Sci. 2023, 6, 1–21. [Google Scholar] [CrossRef]
- Yue, W.; Xu, J.; Tan, W.; Xu, L. The relationship between land surface temperature and NDVI with remote sensing: Application to Shanghai Landsat 7 ETM+ data. Int. J. Remote Sens. 2007, 28, 3205–3226. [Google Scholar] [CrossRef]
- Yang, L.; Jia, K.; Liang, S.; Wei, X.; Yao, Y.; Zhang, X. A robust algorithm for estimating surface fractional vegetation cover from landsat data. Remote Sens. 2017, 9, 857. [Google Scholar] [CrossRef]
- Arun, P.V. A comparative analysis of different DEM interpolation methods. Egypt. J. Remote Sens. Space Sci. 2013, 16, 133–139. [Google Scholar]
- Ajvazi, B.; Czimber, K. A comparative analysis of different DEM interpolation methods in GIS: Case study of Rahovec, Kosovo. Geod. Cartogr. 2019, 45, 43–48. [Google Scholar] [CrossRef]
- Paul, F.; Bolch, T.; Kääb, A.; Nagler, T.; Nuth, C.; Scharrer, K.; Shepherd, A.; Strozzi, T.; Ticconi, F.; Bhambri, R.; et al. The glaciers climate change initiative: Methods for creating glacier area, elevation change and velocity products. Remote Sens. Environ. 2015, 162, 408–426. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Chen, L.-C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Kline, D.M.; Berardi, V.L. Revisiting squared-error and cross-entropy functions for training neural network classifiers. Neural Comput. Appl. 2005, 14, 310–318. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Jang, E.; Gu, S.; Poole, B. Categorical reparameterization with gumbel-softmax. arXiv 2016, arXiv:1611.01144. [Google Scholar]
- Ba, J.; Mnih, V.; Kavukcuoglu, K. Multiple object recognition with visual attention. arXiv 2014, arXiv:1412.7755. [Google Scholar]
- Wang, X.; Girshick, R.; Gupta, A.; He, K. Non-local Neural Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7794–7803. [Google Scholar]
- Deng, X.; Liu, Q.; Deng, Y.; Mahadevan, S. An improved method to construct basic probability assignment based on the confusion matrix for classification problem. Inf. Sci. 2016, 340, 250–261. [Google Scholar] [CrossRef]
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- McHugh, M.L. Interrater reliability: The kappa statistic. Biochem. Medica 2012, 22, 276–282. [Google Scholar] [CrossRef]
- Marochov, M.; Stokes, C.R.; Carbonneau, P.E. Image classification of marine-terminating outlet glaciers in Greenland using deep learning methods. Cryosphere 2021, 15, 5041–5059. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Mölg, N.; Bolch, T.; Walter, A.; Vieli, A. Unravelling the evolution of Zmuttgletscher and its debris cover since the end of the Little Ice Age. Cryosphere 2019, 13, 1889–1909. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Van Beek, L.P.; Bierkens, M.F. Climate change will affect the Asian water towers. Science 2010, 328, 1382–1385. [Google Scholar] [CrossRef] [PubMed]
- Robson, B.A.; Nuth, C.; Dahl, S.O.; Hölbling, D.; Strozzi, T.; Nielsen, P.R. Automated classification of debris-covered glaciers combining optical, SAR and topographic data in an object-based environment. Remote Sens. Environ. 2015, 170, 372–387. [Google Scholar] [CrossRef]
- Tian, S.; Dong, Y.; Feng, R.; Liang, D.; Wang, L. Mapping mountain glaciers using an improved U-Net model with cSE. Int. J. Digit. Earth 2022, 15, 463–477. [Google Scholar] [CrossRef]
- Yan, L.; Wang, J. Glacier mapping based on Chinese high-resolution remote sensing GF-1 satellite and topographic data. Glaciol. Geocryol. 2019, 11, 218–225. [Google Scholar]
- Cheng, D.; Hayes, W.; Larour, E.; Mohajerani, Y.; Wood, M.; Velicogna, I.; Rignot, E. Calving Front Machine (CALFIN): Glacial termini dataset and automated deep learning extraction method for Greenland, 1972–2019. Cryosphere 2021, 15, 1663–1675. [Google Scholar] [CrossRef]
- Zhang, E.; Liu, L.; Huang, L.; Ng, K.S. An automated, generalized, deep-learning-based method for delineating the calving fronts of Greenland glaciers from multi-sensor remote sensing imagery. Remote Sens. Environ. 2021, 254, 112265. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Name | Spectral Band | Spatial Resolution (m) | Products | Date | Sources/Access Link |
|---|---|---|---|---|---|
| GF-2 | Red (R) Green (G) Blue (B) Near infrared (NIR) | 4 | Fusion image (1 m) | 23 August 2020 | China Centre for Resources Satellite Data and Application (https://data.cresda.cn/) (23 October 2022) |
| Panchromatic | 1 | ||||
| Landsat 8 OLI_TIR | B4 (red) B5 (near) infrared | 30 | LST (30 m) | 19 September 2020 | USGS (https://earthexplorer.usgs.gov/) (15 June 2023) |
| B10 (thermal infrared) | 100 | ||||
| ASTER GDEM V3 | — | 30 | Slope (30 m) | August 2020 | NASA (https://www.earthdata.nasa.gov/) (10 May 2023) |
| KGIs | — | 2018–2020 | (https://doi.org/10.5194/essd-15-847-2023) (10 May 2023) | ||
| Model | Accuracy | F1 Score (Debris) | MIoU | Kappa |
|---|---|---|---|---|
| DeepLabv3+ (Xception) | 0.889 | 0.410 | 0.649 | 0.795 |
| DeepLabv3+ (Xception)+CBAM | 0.903 | 0.593 | 0.714 | 0.826 |
| DeepLabv3+ (ResNet-34)+CBAM | 0.890 | 0.551 | 0.688 | 0.803 |
| FCNN | 0.899 | 0.630 | 0.717 | 0.818 |
| U-Net | 0.916 | 0.727 | 0.767 | 0.849 |
| U-Net+CBAM | 0.931 | 0.742 | 0.794 | 0.877 |
| Region | U-Net with CBAM | KGIs | Difference (km2/%) | |
|---|---|---|---|---|
| Area (km2) | ||||
| a | Glacier | 11.89 | 12.84 | 0.95/7.99% |
| Debris | 1.48 | 1.32 | 0.16/10.81% | |
| b | Glacier | 4.46 | 4.89 | 0.43/9.64% |
| Debris | 0.19 | 0.29 | 0.1/52.63% | |
| Total | Glacier | 16.35 | 17.73 | 1.38/7.78% |
| Debris | 1.67 | 1.61 | 0.07/4.19% | |
| Characteristic | Group Truth | Spectrum | Spectrum, LST | Spectrum, Slope | Spectrum, LST, Slope |
|---|---|---|---|---|---|
| Recall (debris) | 1 | 0.62 | 0.72 | 0.72 | 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Xie, F.; Liu, S.; Zhu, Y.; Fan, J.; Zhao, H.; Fu, Y.; Duan, Y.; Fu, R.; Guo, S. Mapping Debris-Covered Glaciers Using High-Resolution Imagery (GF-2) and Deep Learning Algorithms. Remote Sens. 2024, 16, 2062. https://doi.org/10.3390/rs16122062
Yang X, Xie F, Liu S, Zhu Y, Fan J, Zhao H, Fu Y, Duan Y, Fu R, Guo S. Mapping Debris-Covered Glaciers Using High-Resolution Imagery (GF-2) and Deep Learning Algorithms. Remote Sensing. 2024; 16(12):2062. https://doi.org/10.3390/rs16122062
Chicago/Turabian StyleYang, Xin, Fuming Xie, Shiyin Liu, Yu Zhu, Jinghui Fan, Hongli Zhao, Yuying Fu, Yunpeng Duan, Rong Fu, and Siyang Guo. 2024. "Mapping Debris-Covered Glaciers Using High-Resolution Imagery (GF-2) and Deep Learning Algorithms" Remote Sensing 16, no. 12: 2062. https://doi.org/10.3390/rs16122062
APA StyleYang, X., Xie, F., Liu, S., Zhu, Y., Fan, J., Zhao, H., Fu, Y., Duan, Y., Fu, R., & Guo, S. (2024). Mapping Debris-Covered Glaciers Using High-Resolution Imagery (GF-2) and Deep Learning Algorithms. Remote Sensing, 16(12), 2062. https://doi.org/10.3390/rs16122062