Improving the Accuracy of Digital Terrain Models Using Drone-Based LiDAR for the Morpho-Structural Analysis of Active Calderas: The Case of Ischia Island, Italy

 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Geological and Seismological Background
3. Data and Methods
3.1. LiDAR System
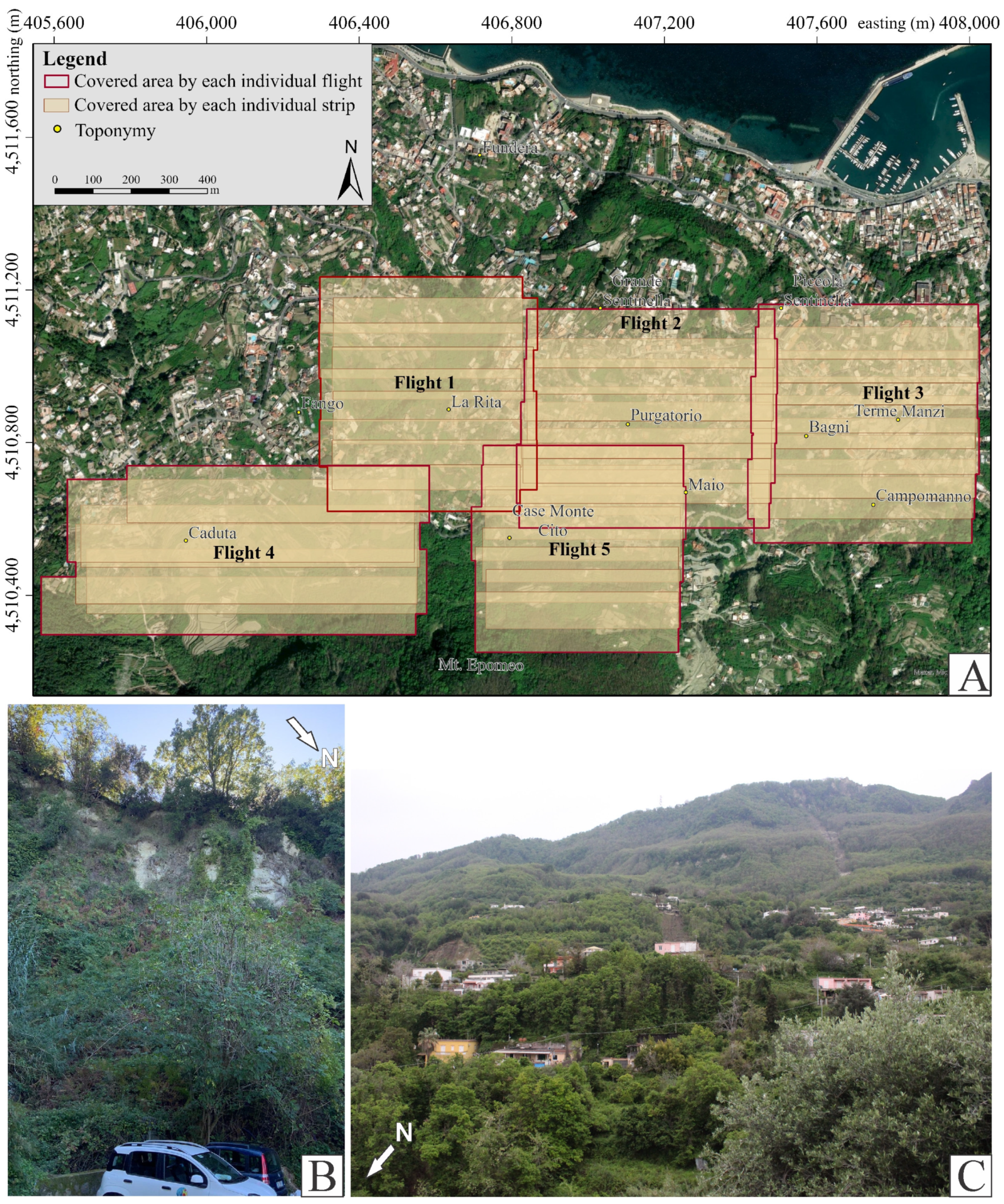
3.2. Drone LiDAR Data Acquisition and Processing
3.2.1. Post-Processing Kinematic Correction (PPK) and Point Cloud Calculation
3.2.2. LiDAR Strip Calibration
3.3. Point Cloud Filtering and DEM Generation
3.4. Data Quality Assessment
3.4.1. Comparison between Existing Digital Terrain Models Datasets
- The most detailed DTM was obtained through the Italian Extraordinary Remote-Sensing Plan (PST—Piano Straordinario di Telerilevamento). This plan aimed to gather airborne-based LiDAR data and generate a high-resolution DTM product with a 2 m resolution [85].
- On the other hand, a DTM dataset was obtained from the Global Ecosystem Dynamics Investigation (GEDI) instrument, a LiDAR system installed on the International Space Station (ISS). Since its launch in 2018, it has provided high-quality 3D observations over 25 m circular paths on the ground, providing elevation data at 30 m resolution [86].
- The Shuttle Radar Topography Mission (SRTM) DTM products are widely regarded as the most comprehensive and highest-resolution freely available data, providing global coverage through radar interferometry. The SRTM data were collected with a sampling grid of approximately 30 m × 30 m [87].
- The EU-DEM v1.0 is a digital surface model (DSM) representing the first illuminated surface as captured by the sensors. This hybrid product combines SRTM and ASTER GDEM data using a weighted averaging approach, resulting in a contiguous dataset divided into 1-degree by 1-degree tiles following the SRTM naming convention [88].
3.4.2. Vertical Accuracy
3.5. Derived DTM Products and Morpho-Structural Features Extraction
4. Results
4.1. LiDAR Point Cloud
4.2. Digital Elevation Model Quality Assessment
Vertical Accuracy
4.3. Morpho-Structural Analysis
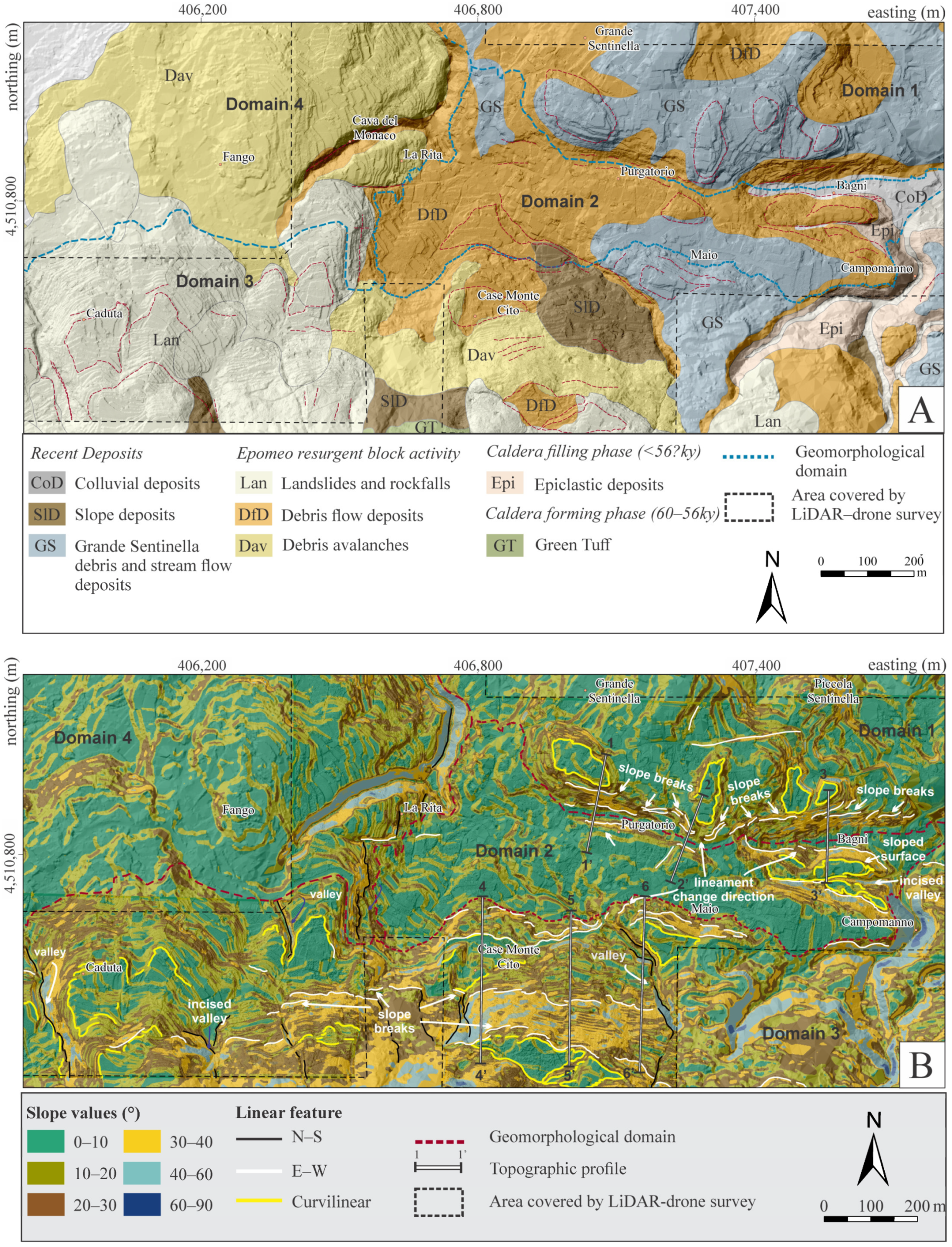
4.3.1. Areal Features
4.3.2. Linear Features
5. Discussion
5.1. Data and Digital Elevation Model Quality
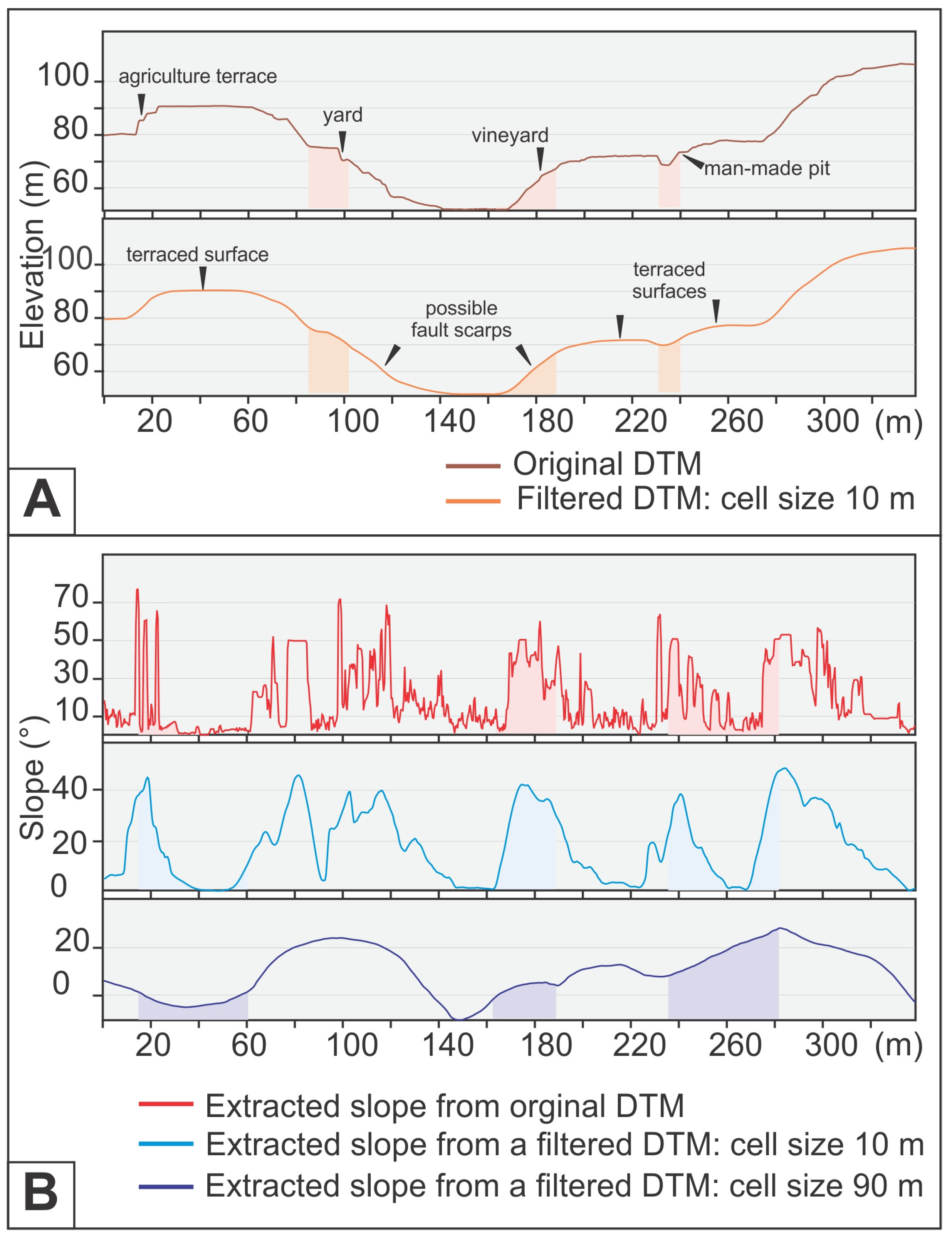
5.2. DTM Resolution
5.3. External Factors Consideration for DTM Accuracy and Reliability
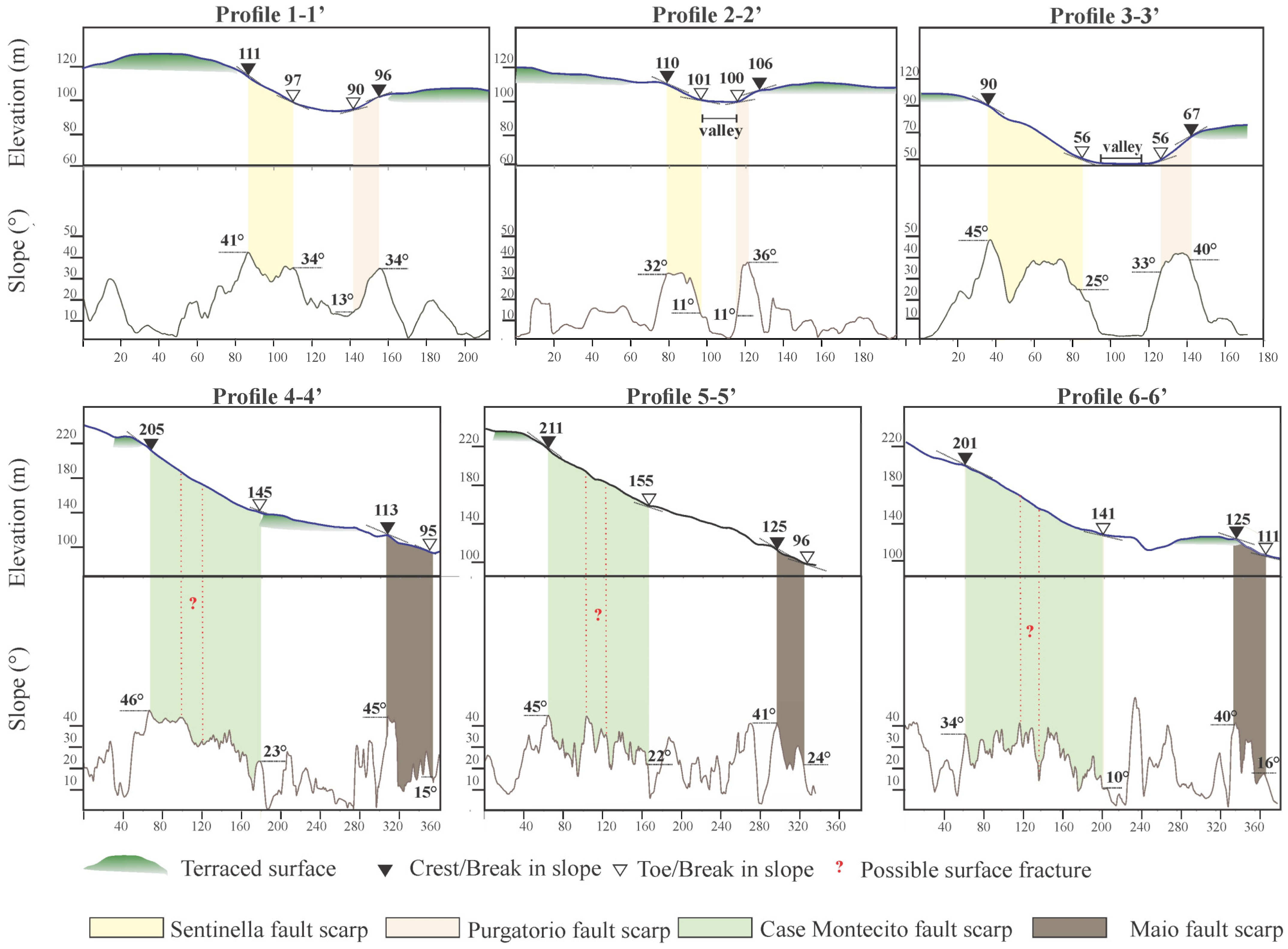
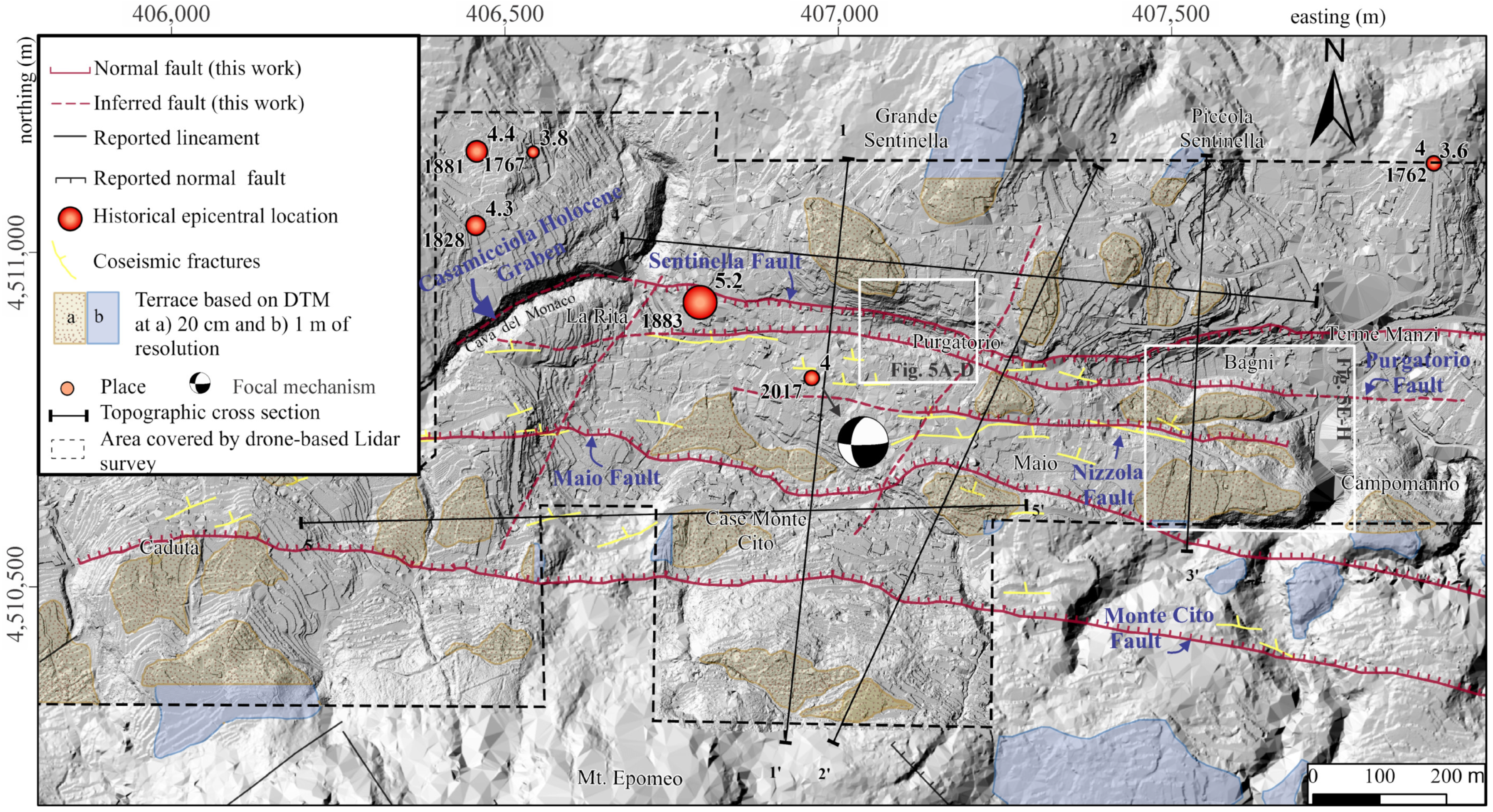
5.4. Definition of Fault Scarp Structures
5.4.1. Maio Fault: Southern Synthetic Fault
5.4.2. Sentinella Fault: Northern Antithetic Fault
5.4.3. Monte Cito Fault: Master Fault
5.5. Structural and Geological Control on Morphology Features
6. Conclusions
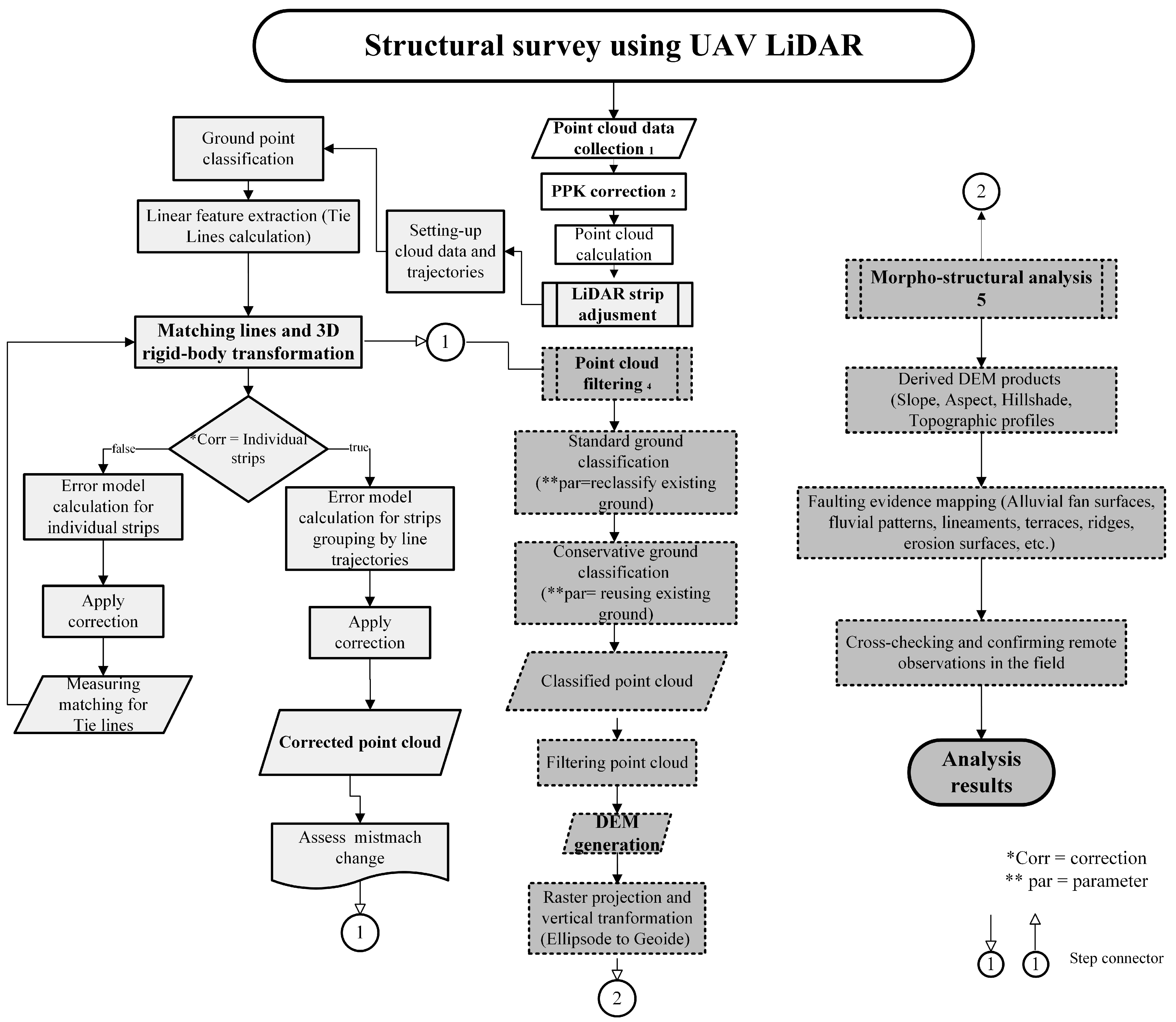
- Although the presented workflow (Figure 4) implies different processes commonly applied for the usage of LiDAR data, we proposed a novel application of drone-based LiDAR data adapted to show accurate and precise geomorphological information. A similar approach can be used in areas where the evidence of high deformation rates is masked by vegetation conditions or by inaccessible areas. Particularly, the 3D transformation process to calibrate the point cloud raw data improved the quality of the DEM data and its subsequent derived products. The mismatch that existed has been reduced, avoiding the effect of artifacts in the elevation data products.
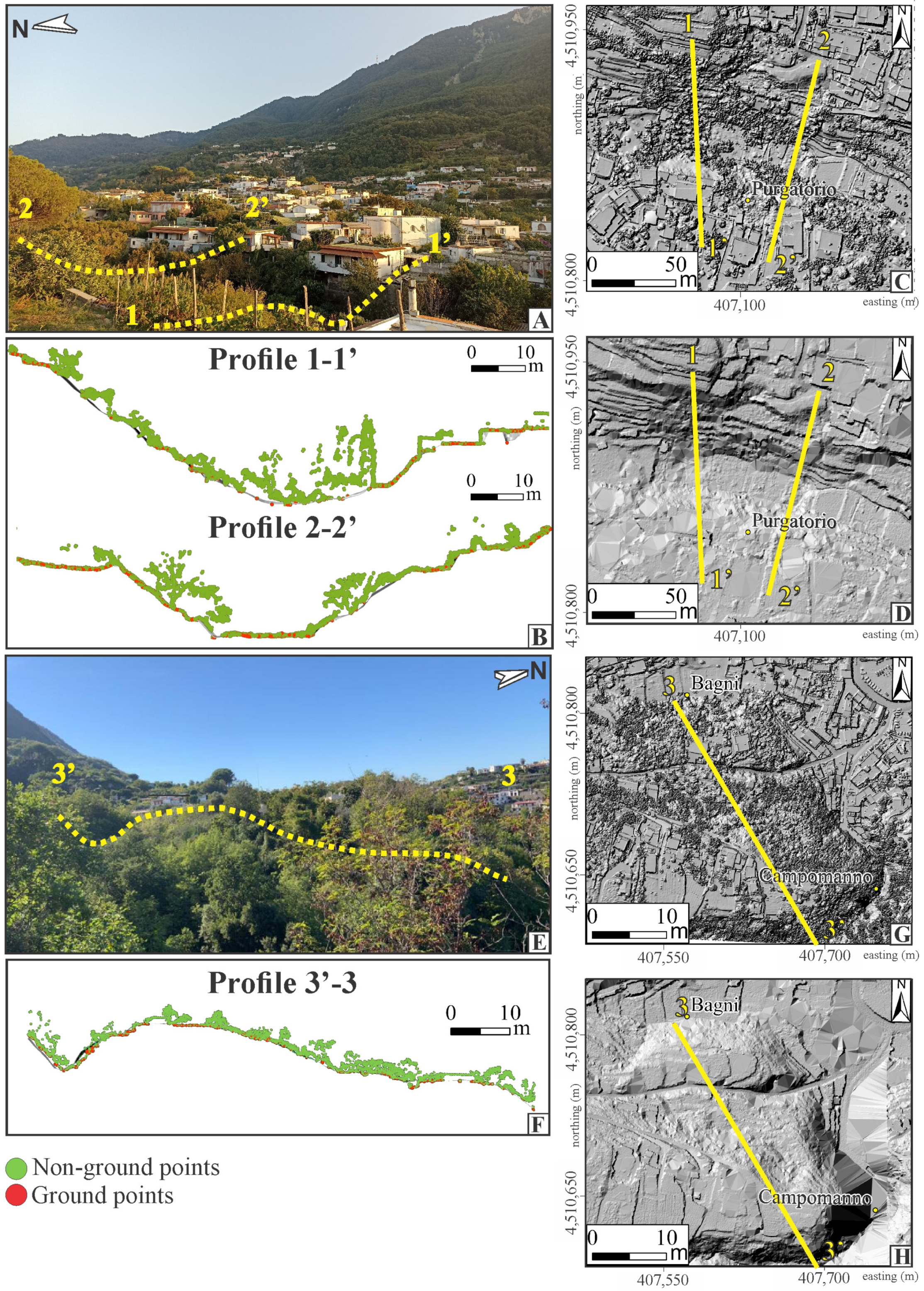
- The approach for the ground-filtering process showed an acceptable classification between the ground and non-ground control points. The verification through the analysis of cloud point profiles and the control fieldwork led us to consider the ground-filtering process accurate enough to preserve the ground points captured by the LiDAR laser beam.
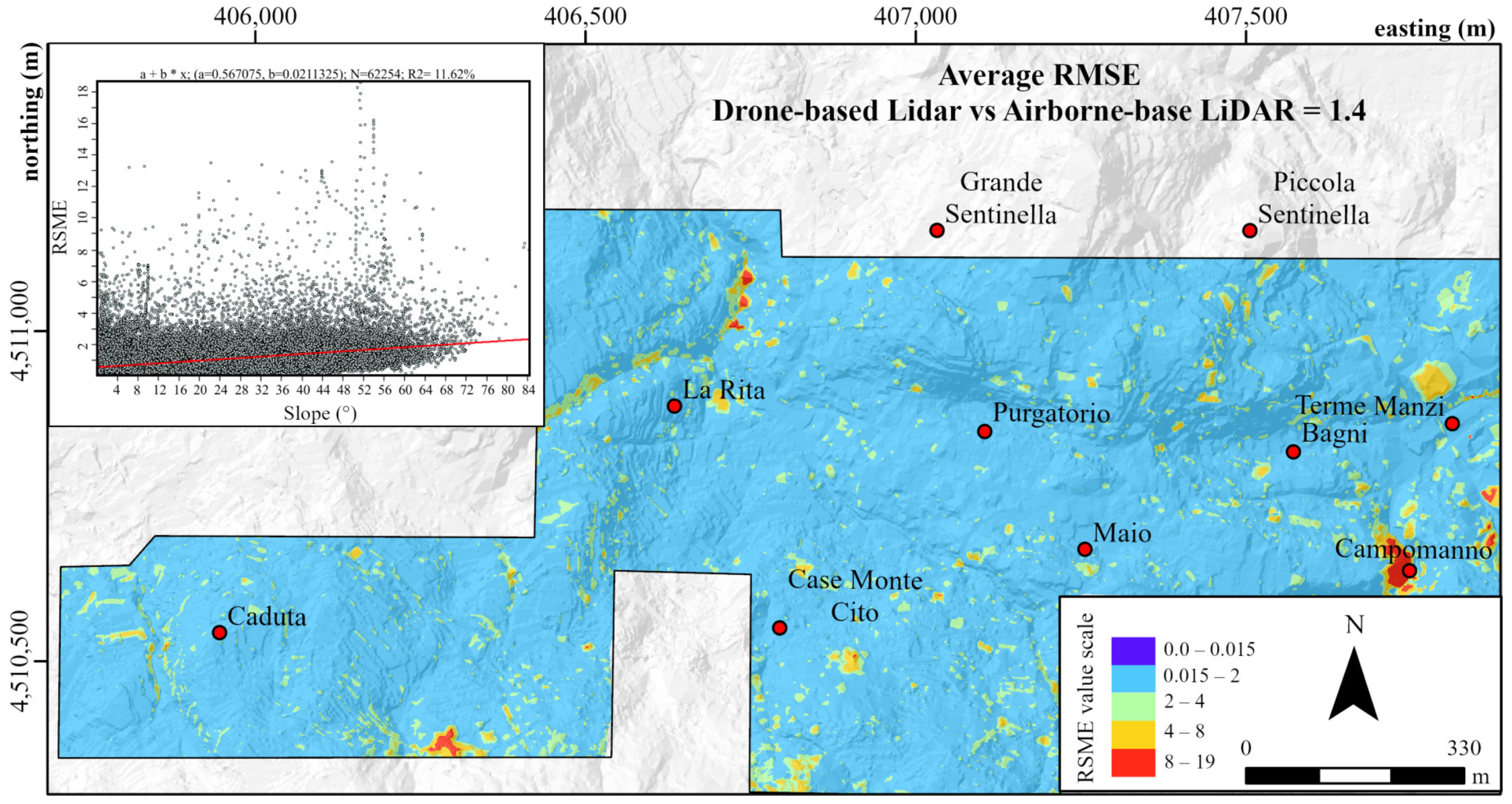
- The drone-based LiDAR outcomes yielded the most accurate and detailed Digital Elevation Model for the northern part of Ischia Island. However, compared to existing DEM datasets, our result is the first DEM able to display evidence of active deformation.
- The northern flank of Mt. Epomeo is characterized by four different morphological domains revealed by the linear and areal features extracted from the drone-based LiDAR. The characteristic of each domain has been the result of the interplay between the (1) the deposition mechanics and the sedimentological properties of the covering rocks, (2) the active faulting developed throughout the resurgence history of Mt. Epomeo, (3) different slip rates, and (4) erosion and deposition processes.
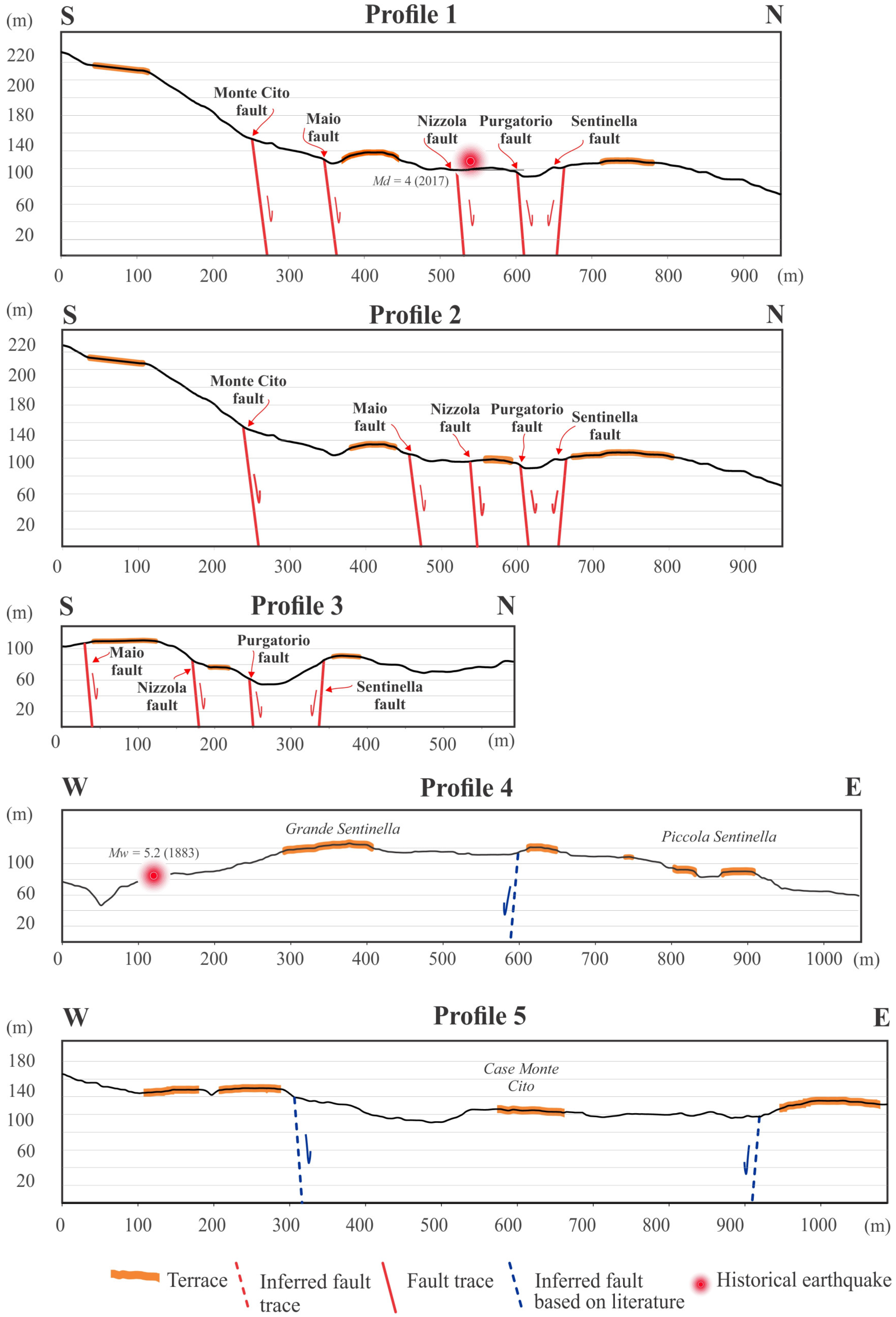
- The identification of terraced surfaces, slope breaks, scarp toes, and their morphometric values, their corroboration on the field, and morphological features previously unreported, allowed us to define a detailed geometry of the fault structures in the CHG. To the southern part of the Casamicciola Holocene Graben (CHG), the E-W-striking Monte Cito fault represents the master structure (Figure 12). The southernmost and synthetic structure (Maio fault) that forms the CHG runs at the base of different terraced surfaces at a maximum height of 125 m. The northernmost and antithetic fault structure is well-defined at the base of terraces at 115 m. Both faults coincide with the previously inferred main structures by Tibaldi and Vezzoli (1998) [30].
- The evolution of the northern flank of Mt. Epomeo, in combination with the fastest slip rate (26 mm/yr), shows a major control on the morphological features along the southern faults of the CHG. In contrast, the northern horst structure is morphologically more controlled by a lower slip rate (6 mm/yr), whereas the central part of the graben has been modified by the processes of erosion/sedimentation and deposition, rather than faulting activity.
- Our research shows the remarkable efficacy of drone-based LiDAR in neotectonic mapping. The identified geomorphological features were indispensable for characterizing and interpreting the presence of active faults and the analysis of landscape morphology and its relationship with geological evolution. Additionally, the technique speeded up time-consuming mapping tasks, while facilitating access to challenging areas at affordable prices.
- The potential applications of drone-based LiDAR extend far beyond our specific study, being applicable across different geological environments. In paleoseismological studies, high-resolution DTMs can serve as guidance for an accurate identification of trenching sites. A precise and detailed mapping of drainage patterns and gullies can lead the location of fault surface exhumation, while avoiding areas affected by erosional processes. Additionally, detailed morphological data enhance the accuracy of quantifying landform offsets and fault displacements, important for the reconstruction of past seismic events. Furthermore, this tool can also assist in the characterization of volcanic activity mechanisms and their influence over the flow dynamics, rheology, and morphology emplacement of volcanic materials (e.g., lahars, pyroclastic density currents, tephra fall). This is particularly important when emplacement and collapse mechanisms, and cover distribution and extension, are considered to produce volcanic risks scenario maps. Additionally, assessing volcanic hazards often involves the modeling of past volcanic flows, where the drone-based LiDAR can represent probably one of the best sources to produce trustworthy DTMs to obtain confident simulation results. Drone-based LiDAR products can be essential also in the study of sedimentary basins, where the morphological characterization of fluvial fans sheds light on understanding paleoclimate and tectonic signals, as well as concerning geological hazards. Lastly, in civil engineering planning, this tool can be useful in areas where vegetation may obscure morphological evidence of unstable slopes, fault structures, shear zones, caves, karstic sinkholes, etc. In this way, engineering plan projects can mitigate risks, optimize designs, and ensure the long-term stability and safety of infrastructure.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shan, J.; Hyyppä, J. Advances in Airborne Lidar Systems and Data Processing; CRC: Boca Raton, FL, USA, 2018. [Google Scholar]
- Baltsavias, E.P. Airborne laser scanning: Existing systems and firms and other resources. ISPRS J. Photogrametry Remote Sens. 1999, 54, 164–198. [Google Scholar] [CrossRef]
- Mazzarini, F.; Pareschi, M.T.; Favalli, M.; Isola, I.; Tarquini, S.; Boschi, E. Morphology of basaltic lava channels during the Mt. Etna September 2004 eruption from airborne laser altimeter data. Geophys. Res. Lett. 2005, 32, 1. [Google Scholar] [CrossRef]
- Mouginis-Mark, P.J.; Garbeil, H. Quality of TOPSAR topographic data for volcanology studies at Kilauea Volcano, Hawaii: An assessment using airborne lidar data. Remote Sens. Environ. 2005, 96, 149–164. [Google Scholar] [CrossRef]
- Davila, N.; Capra, L.; Gavilanes-Ruiz, J.C.; Varley, N.; Norini, G.; Vazquez, A.G. Recent lahars at Volcán de Colima (Mexico): Drainage variation and spectral classification. J. Volcanol. Geotherm. Res. 2007, 165, 127–141. [Google Scholar] [CrossRef]
- Ventura, G.; Vilardo, G. Emplacement mechanism of gravity flows inferred from high resolution Lidar data: The 1944 Somma-Vesuvius lava flow (Italy). Geomorphology 2008, 95, 223–235. [Google Scholar] [CrossRef]
- Favalli, M.; Fornaciai, A.; Pareschi, M.T. LIDAR strip adjustment: Application to volcanic areas. Geomorphology 2009, 111, 123–135. [Google Scholar] [CrossRef]
- Kósik, S.; Németh, K.; Rees, C. Integrating LiDAR to unravel the volcanic architecture and eruptive history of the peralkaline Tūhua (Mayor Island) volcano, New Zealand. Geomorphology 2022, 418, 108481. [Google Scholar] [CrossRef]
- Neri, M.; Mazzarini, F.; Tarquini, S.; Bisson, M.; Isola, I.; Behncke, B.; Pareschi, M.T. The changing face of Mount Etna’s summit area documented with Lidar technology. Geophys. Res. Lett. 2008, 35, 1–6. [Google Scholar] [CrossRef]
- Conforti, M.; Mercuri, M.; Borrelli, L. Morphological changes detection of a large earthflow using archived images, lidar-derived dtm, and uav-based remote sensing. Remote Sens. 2021, 13, 120. [Google Scholar] [CrossRef]
- Liu, X. Airborne LiDAR for DEM generation: Some critical issues. Prog. Phys. Geogr. 2008, 32, 31–49. [Google Scholar]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Schroder, W.; Murtha, T.; Golden, C.; Scherer, A.K.; Broadbent, E.N.; Almeyda Zambrano, A.M.; Herndon, K.; Griffin, R. UAV LiDAR survey for archaeological documentation in Chiapas, Mexico. Remote Sens. 2021, 13, 4731. [Google Scholar] [CrossRef]
- Resop, J.P.; Lehmann, L.; Cully Hession, W. Drone laser scanning for modeling riverscape topography and vegetation: Comparison with traditional aerial lidar. Drones 2019, 3, 35. [Google Scholar] [CrossRef]
- Arora, K.; Srinu, Y. Surface traces of seismogenic faults from airborne LiDAR in Koyna–Warna region of Deccan Volcanic Province. J. Earth Syst. Sci. 2022, 131, 148. [Google Scholar] [CrossRef]
- Finley, T.; Salomon, G.; Nissen, E.; Stephen, R.; Cassidy, J.; Menounos, B. Preliminary Results and Structural Interpretation from Drone Lidar Surveys over the Eastern Denali Fault; Yukon Geological Survey: Whitehorse, YT, Canada, 2022.
- Fleming, C.; Marsh, S.H.; Giles, J.R.A. Introducing elevation models for geoscience. Geol. Soc. 2022, 345, 1–4. [Google Scholar] [CrossRef]
- Valkanou, K.; Karymbalis, E.; Papanastassiou, D.; Soldati, M.; Chalkias, C.; Gaki-Papanastassiou, K. Assessment of Neotectonic Landscape Deformation in Evia Island, Greece, Using GIS-Based Multi-Criteria Analysis. ISPRS Int. J. Geo-Inf. 2021, 10, 118. [Google Scholar] [CrossRef]
- Barreca, G.; Corradino, M.; Monaco, C.; Pepe, F. Active Tectonics along the South East Offshore Margin of Mt. Etna: New Insights from High-Resolution Seismic Profiles. Geosciences 2018, 8, 62. [Google Scholar] [CrossRef]
- Vitale, S.; Isaia, R. Fractures and Faults in Volcanic Rocks (Campi Flegrei, Southern Italy): Insight into Volcano-Tectonic Processes. Int. J. Earth Sci. 2014, 103, 801–819. [Google Scholar] [CrossRef]
- Norini, G.; Groppelli, G.; Sulpizio, R.; Carrasco-Núñez, G.; Dávila-Harris, P.; Pellicioli, C.; Zucca, F.; De Franco, R. Structural Analysis and Thermal Remote Sensing of the Los Humeros Volcanic Complex: Implications for Volcano Structure and Geothermal Exploration. J. Volcanol. Geotherm. Res. 2015, 301, 221–237. [Google Scholar] [CrossRef]
- Norini, G.; Carrasco-Núñez, G.; Corbo-Camargo, F.; Lermo, J.; Rojas, J.H.; Castro, C.; Bonini, M.; Montanari, D.; Corti, G.; Moratti, G.; et al. The Structural Architecture of the Los Humeros Volcanic Complex and Geothermal Field. J. Volcanol. Geotherm. Res. 2019, 381, 312–329. [Google Scholar] [CrossRef]
- Tibaldi, A.; Romero Leon, J. Morphometry of Late Pleistocene-Holocene Faulting and Volcano tectonic Relationship in the Southern Andes of Colombia. Tectonics 2000, 19, 358–377. [Google Scholar] [CrossRef]
- Nappi, R.; Alessio, G.; Gaudiosi, G.; Nave, R.; Marotta, E.; Siniscalchi, V.; Civico, R.; Pizzimenti, L.; Peluso, R.; Belviso, P.; et al. The 21 August 2017 Md 4.0 Casamicciola Earthquake: First Evidence of Coseismic Normal Surface Faulting at the Ischia Volcanic Island. Seismol. Res. Lett. 2018, 89, 1323–1334. [Google Scholar] [CrossRef]
- Nappi, R.; Porfido, S.; Paganini, E.; Vezzoli, L.; Ferrario, M.F.; Gaudiosi, G.; Alessio, G.; Michetti, A.M. The 2017, md = 4.0, casamicciola earthquake: Esi-07 scale evaluation and implications for the source model. Geosciences 2021, 11, 44. [Google Scholar] [CrossRef]
- Sbrana, A.; Marianelli, P.; Pasquini, G. The Phlegrean Fields Volcanological Evolution. J. Maps 2021, 17, 557–570. [Google Scholar] [CrossRef]
- Aucelli, P.P.C.; Mattei, G.; Caporizzo, C.; Di Luccio, D.; Tursi, M.F.; Pappone, G. Coastal vs Volcanic Processes: Procida Island as a Case of Complex Morpho-Evolutive Response. Mar. Geol. 2022, 448, 106814. [Google Scholar] [CrossRef]
- Natale, J.; Camanni, G.; Ferranti, L.; Isaia, R.; Sacchi, M.; Spiess, V.; Steinmann, L.; Vitale, S. Fault Systems in the Offshore Sector of the Campi Flegrei Caldera (Southern Italy): Implications for Nested Caldera Structure, Resurgent Dome, and Volcano-Tectonic Evolution. J. Struct. Geol. 2022, 163, 104723. [Google Scholar] [CrossRef]
- Chiocci, F.L.; Guerrieri, L.; Monegato, G.; Pieruccini, P. Quaternary Map of Italy (Sheet 3). In Proceedings of the XXI INQUA Congress, Rome, Italy, 14–21 July 2023. [Google Scholar]
- Tibaldi, A.; Vezzoli, L. The space problem of caldera resurgence: An example from Ischia Island, Italy. Int. J. Earth Sci. 1998, 87, 53–66. [Google Scholar] [CrossRef]
- Sbrana, A.; Marianelli, P.; Pasquini, G. Volcanology of ischia (Italy). J. Maps 2018, 14, 494–503. [Google Scholar] [CrossRef]
- Vezzoli, L. Island of Ischia, in Quaderni de la Ricerca Scientifica; Vezzoli, L., Ed.; Consiglio Nazionale delle Ricerche: Roma, Italy, 1988; pp. 1–122.
- Nappi, R.; Alessio, G.; Bellucci Sessa, E. A case study comparing landscape metrics to geologic and seismic data from the Ischia Island (Southern Italy). Appl. Geomat. 2010, 2, 73–82. [Google Scholar] [CrossRef]
- De Novellis, V.; Carlino, S.; Castaldo, R.; Tramelli, A.; De Luca, C.; Pino, N.A.; Pepe, S.; Convertito, V.; Zinno, I.; De Martino, P.; et al. The 21 August 2017 Ischia (Italy) Earthquake Source Model Inferred From Seismological, GPS, and DInSAR Measurements. Geophys. Res. Lett. 2018, 45, 2193–2202. [Google Scholar] [CrossRef]
- Selva, J.; Azzaro, R.; Taroni, M.; Tramelli, A.; Alessio, G.; Castellano, M.; Ciuccarelli, C.; Cubellis, E.; Lo Bascio, D.; Porfido, S.; et al. The Seismicity of Ischia Island, Italy: An Integrated Earthquake Catalogue from 8th Century BC to 2019 and Its Statistical Properties. Front. Earth Sci. 2021, 9, 629736. [Google Scholar] [CrossRef]
- Michetti, A.M.; Esposito, E.; Guerrieri, L.; Porfido, S.; Serva, L.; Tatevossian, R.; Vittori, E.; Audemard, F.; Azuma, T.; Clague, J.; et al. Environmental seismic intensity scale-ESI 2007. Mem. Descr. Carta Geol. Ital. 2007, 74, 7–23. [Google Scholar]
- Michetti, A.L.; Esposito, E.; Mohammadioun, B.; Mohammadioun, J.; Gurpinar, A.; Porfido, S.; Rogozhin, E.; Serva, L.; Tatevossian, R.; Vittori, E.; et al. The INQUA scale: An innovative approach for assessing earthquake intensities based on seismically induced ground effects in the environment. Carta Geol. Ital. 2004, 67, 5–115. [Google Scholar]
- Serva, L.; Vittori, E.; Comerci, V.; Esposito, E.; Guerrieri, L.; Michetti, A.M.; Mohammadioun, B.; Mohammadioun, G.C.; Porfido, S.; Tatevossian, R.E. Earthquake Hazard and the Environmental Seismic Intensity (ESI) Scale. Pure Appl. Geophys. 2016, 173, 1479–1515. [Google Scholar] [CrossRef]
- Keller, E.A.; Pinter, N. Active Tectonics—Earthquakes, Uplift and Landscape; Prentice Hall: Upper Saddle River, NJ, USA, 2002; pp. 33–35. ISBN 0-13-088230-5. [Google Scholar]
- Nappi, R.; Nave, R.; Gaudiosi, G.; Alessio, G.; Siniscalchi, V.; Marotta, E.; Civico, R.; Pizzimenti, L.; Peluso, R.; Belviso, P.; et al. Coseismic Evidence of Surface Faulting at the Ischia Volcanic Island after the 21 August 2017 Md 4.0 Casamicciola Earthquake; PANGAEA: Los Angeles, CA, USA, 2020. [Google Scholar]
- Calderoni, G.; Di Giovambattista, R.; Pezzo, G.; Albano, M.; Atzori, S.; Tolomei, C.; Ventura, G. Seismic and Geodetic Evidences of a Hydrothermal Source in the Md 4.0, 2017, Ischia Earthquake (Italy). J. Geophys. Res. Solid Earth 2019, 124, 5014–5029. [Google Scholar] [CrossRef]
- Montuori, A.; Albano, M.; Polcari, M.; Atzori, S.; Bignami, C.; Tolomei, C.; Pezzo, G.; Moro, M.; Saroli, M.; Stramondo, S.; et al. Using Multi-Frequency InSAR Data to Constrain Ground Deformation of Ischia Earthquake. In Proceedings of the Conference International Geoscience and Remote Sensing Symposium-IGARSS, Valencia, Espana, 22–27 July 2018; pp. 1–3. [Google Scholar]
- Albano, M.; Saroli, M.; Montuori, A.; Bignami, C.; Tolomei, C.; Polcari, M.; Pezzo, G.; Moro, M.; Atzori, S.; Stramondo, S.; et al. The Relationship between InSAR Coseismic Deformation and Earthquake-Induced Landslides Associated with the 2017 Mw 3.9 Ischia (Italy) Earthquake. Geosciences 2018, 8, 303. [Google Scholar] [CrossRef]
- Poli, S.; Chiesa, S.; Gillot, P.-Y.; Gregnanin, A.; Guichard, F. Chemistry versus time in the volcanic complex of Ischia (Gulf of Naples, Italy): Evidence of successive magmatic cycles. Contrib. Miner. Petrol. 1987, 95, 322–335. [Google Scholar] [CrossRef]
- Rittmann, A. Geologie der Insel Ischia; D. Reimer (E. Vohsen): Zurich, Switzerland, 1930. [Google Scholar]
- Carlino, S.; Sbrana, A.; Pino, N.A.; Marianelli, P.; Pasquini, G.; De Martino, P.; De Novellis, V. The Volcano-Tectonics of the Northern Sector of Ischia Island Caldera (Southern Italy): Resurgence, Subsidence and Earthquakes. Front. Earth Sci. 2022, 10, 730023. [Google Scholar] [CrossRef]
- Brown, R.J.; Civetta, L.; Arienzo, I.; D’Antonio, M.; Moretti, R.; Orsi, G.; Tomlinson, E.L.; Albert, P.G.; Menzies, M.A. Geochemical and isotopic insights into the assembly, evolution and disruption of a magmatic plumbing system before and after a cataclysmic caldera-collapse eruption at Ischia volcano (Italy). Contrib. Mineral. Petrol. 2014, 168, 1–23. [Google Scholar] [CrossRef]
- Orsi, G.; Gallo, G.; Zanchi, A. Simple-shearing block resurgence in caldera depressions. A model from Pantelleria and Ischia. J. Volcanol. Geotherm. Res. 1991, 47, 1–11. [Google Scholar] [CrossRef]
- Acocella, V.; Cifelli, F.; Funiciello, R. Analogue models of collapse calderas and resurgent domes. J. Volcanol. Geotherm. Res. 2000, 104, 81–96. [Google Scholar] [CrossRef]
- Acocella, V.; Funiciello, R.; Marotta, E.; Orsi, G.; de Vita, S. The role of extensional structures on experimental calderas and resurgence. J. Volcanol. Geotherm. Res. 2004, 129, 199–217. [Google Scholar] [CrossRef]
- Saunders, S.J. The possible contribution of circumferential fault intrusion to caldera resurgence. Bull. Volcanol. 2004, 67, 57–71. [Google Scholar] [CrossRef]
- Ricco, C.; Alessio, G.; Aquino, I.; Brandi, G.; Brunori, C.A.; D’errico, V.; Dolce, M.; Mele, G.; Nappi, R.; Pizzimenti, L.; et al. High precision leveling survey following the MD 4.0 casamicciola earthquake of august 21, 2017 (Ischia, southern Italy): Field data and preliminar interpretation. Ann. Geophys. 2018, 61, 1–16. [Google Scholar] [CrossRef]
- Briseghella, B.; Demartino, C.; Fiore, A.; Nuti, C.; Sulpizio, C.; Vanzi, I.; Lavorato, D.; Fiorentino, G. Preliminary data and field observations of the 21st of August 2017 Ischia earthquake. Bull. Earthq. Eng. 2019, 17, 1221–1256. [Google Scholar] [CrossRef]
- Pischiutta, M.; Petrosino, S.; Nappi, R. Directional amplification and ground motion polarization in Casamicciola area (Ischia volcanic island) after the 21 August 2017 Md 4.0 earthquake. Front. Earth Sci. 2022, 10, 999222. [Google Scholar] [CrossRef]
- Alessio, G.; Ferranti, L.; Mastrolorenzo, G.; Porfido, S. Correlazione tra sismicita′ ed elementi strutturale nell’Isola d’Ischia. Ital. J. Quat. Sci. 1996, 9, 303–308. [Google Scholar]
- Molin, P.; Acocella, V.; Funiciello, R. Structural, seismic and hydrothermal features at the border of an active inter-mittent resurgent block: Ischia Island (Italy). J. Volcanol. Geotherm. Res. 2003, 121, 65–81. [Google Scholar] [CrossRef]
- Carlino, S.; Cubellis, E.; Marturano, A. The catastrophic 1883 earthquake at the island of Ischia (southern Italy): Macroseismic data and the role of geological conditions. Nat. Hazards 2010, 52, 231–247. [Google Scholar] [CrossRef]
- Cubellis, E.; Luongo, G. Il Terremoto del 28 Luglio 1883 a Casamicciola nell’Isola d’Ischia—Il Contesto Fisico, Monografia n.1—Servizio Sismico Nazionale; Istituto Poligrafico e Zecca dello Stato: Roma, Italy, 1998; Volume 1, pp. 49–123. [Google Scholar]
- Luongo, G.; Carlino, S.; Cubellis, E.; Delizia, I.; Iannuzzi, R.; Obrizzo, F. Il Terremoto di Casamicciola del 1883: Una Ricostruzione Mancata; Alfa Tipografia: Napoli, Italy, 2006; p. 64. [Google Scholar]
- Braun, T.; Famiani, D.; Cesca, S. Seismological constraints on the source mechanism of the damaging seismic event of 21 August 2017 on Ischia Island (Southern Italy). Seismol. Res. Lett. 2018, 89, 1741–1749. [Google Scholar] [CrossRef]
- Nardone, L.; Vassallo, M.; Cultrera, G.; Sapia, V.; Petrosino, S.; Pischiutta, M.; Di Vito, M.; de Vita, S.; Galluzzo, D.; Milana, G.; et al. A geophysical multidisciplinary approach to investigate the shallow subsoil structures in volcanic environment: The case of Ischia Island. J. Volcanol. Geotherm. Res. 2023, 438, 107820. [Google Scholar] [CrossRef]
- Mancini, M.; Caciolli, M.C.; Gaudiosi, I.; Alleanza, G.A.; Cavuoto, G.; Coltella, M.; Cosentino, G.; Di Fiore, V.; d’Onofrio, A.; Gargiulo, F.; et al. Seismic Microzonation in a Complex Volcano-Tectonic Setting: The Case of Northern and Western Ischia Island (Southern Italy). Ital. J. Geosci. 2021, 140, 382–408. [Google Scholar] [CrossRef]
- Del Gaudio, C.; Aquino, I.; Ricco, C.; Sepe, V.; Serio, C. Monitoraggio geodetico dell’isola d’Ischia: Risultati della li-vellazione geometrica di precisione eseguita a Giugno 2010. Quad. Geofis. 2011, 87, 1590–2595. [Google Scholar]
- De Martino, P.; Dolce, M.; Brandi, G.; Scarpato, G.; Tammaro, U. The ground deformation history of the neapolitan volcanic area (Campi flegrei caldera, somma—Vesuvius volcano, and ischia island) from 20 years of continuous gps observations (2000–2019). Remote Sens. 2021, 13, 2725. [Google Scholar] [CrossRef]
- Galvani, A.; Pezzo, G.; Sepe, V.; Ventura, G. Shrinking of Ischia Island (Italy) from long-term geodetic data: Implications for the deflation mechanisms of resurgent calderas and their relationships with seismicity. Remote Sens. 2021, 13, 4648. [Google Scholar] [CrossRef]
- Nappi, R.; Alessio, G.; Gaudiosi, G.; Nave, R.; Marotta, R.E.; Siniscalchi, V.; Peluso, R.; Belviso, P.; Civico, R.; Pizzimenti, L.; et al. Reply to “Comment on ‘The 21 August 2017 m d 4.0 Casamicciola Earthquake: First Evidence of Coseismic Normal Surface Faulting at the Ischia Volcanic Island’ by Nappi et al. (2018)” by v. De Novellis, s. Carlino, R. Castaldo, A. Tramelli, c. De Luca, n. A. Pino, s. Pepe, v. Convertito, I. Zinno, P. De Martino, M. Bonano, f. Giudice Pietro, f. Casu, G. Macedonio, M. Manunta, M. Manzo, G. Solaro, P. Tizzani, G. Zeni, and R. Lanari. Seismol. Res. Lett. 2019, 90, 316–321. [Google Scholar]
- Riuscetti, M.; Distefano, R. Il Terremoto Di Macchia (Catania). Bolletino Geofis. Teor. E Appl. 1971, 12, 150–164. [Google Scholar]
- Azzaro, R. Earthquake Surface Faulting at Mount Etna Volcano (Sicily) and Implications for Active Tectonics. J. Geodyn. 1999, 28, 193–213. [Google Scholar] [CrossRef]
- Giglierano, J.D. LiDAR basics for natural resource mapping applications. Geol. Soc. 2010, 345, 103–115. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- HxGN SmartNet. Available online: https://hxgnsmartnet.com/ (accessed on 28 October 2023).
- Abdelfatah, M.A.; Lotfy, A.; Hosny, H. Optimization Analysis for the Performance of Post-Processing Kinematic GNSS Local Multiple Reference Stations. Arab. J. Geosci. 2021, 14, 2541. [Google Scholar] [CrossRef]
- Huising, E.J.; Gomes Pereira, L.M. Errors and accuracy estimates of laser data acquired by various laser scanning systems for topographic applications. ISPRS J. Photogramm. Remote Sens. 1998, 53, 245–261. [Google Scholar] [CrossRef]
- Habib, A.F.; Al-Durgham, M.; Kersting, A.P.; Quackenbush, P. Error Budget of LiDAR Systems and Quality Control of the Derived Point Cloud. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 203–209. [Google Scholar]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Schenk, T. Modeling and analyzing systematic errors in airborne laser scanners. Tech. Notes Photogramm. 2001, 19, 1–42. [Google Scholar]
- Habib, A.F.; Alruzouq, R.I. Line-based modified iterated Hough transform for automatic registration of multi-source imagery. Photogramm. Rec. 2004, 19, 5–21. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Zhang, K.; Whitman, D. Comparison of Three Algorithms for Filtering Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2005, 71, 313–323. [Google Scholar] [CrossRef]
- Klápště, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudrý, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 13, 1672–1694. [Google Scholar]
- Podobnikar, T.; Vrečko, A. Digital Elevation Model from the Best Results of Different Filtering of a LiDAR Point Cloud. Trans. GIS 2012, 16, 603–617. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Haralick, R.M.; Sternberg, S.R.; Zhuang, X. Image Analysis Using Mathematical Morphology. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 1–9, 532–549. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Yong, B.; van Oosterom, P.; Lemmens, M.; Wu, H.; Ren, L.; Zheng, M.; Zhou, J. Airborne LiDAR Data Filtering Based on Geodesic Transformations of Mathematical Morphology. Remote Sens. 2017, 9, 1104. [Google Scholar] [CrossRef]
- Ministero dell’Ambiente e della Sicurezza Energetica—Geoportale Nazionale. Available online: https://gn.mase.gov.it/portale/piano-straordinario-di-telerilevamento (accessed on 15 September 2023).
- Schleich, A.; Durrieu, S.; Soma, M.; Vega, C. Improving GEDI Footprint Geolocation using a High Resolution Improving GEDI Footprint Geolocation using a High-Resolution Digital Terrain Model Digital Terrain Model Improving GEDI Footprint Geolocation using a High-Resolution Digital Terrain Model. TechRxiv, 2023; preprint. [Google Scholar]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, RG2004. [Google Scholar] [CrossRef]
- Hengl, T.; Leal Parente, L.; Krizan, J.; Bonannella, C. Continental Europe Digital Terrain Model at 30 m Resolution Based on GEDI and Background Layers. Available online: https://zenodo.org/records/4724549 (accessed on 10 September 2023).
- Tarquini, S.; Isola, I.; Favalli, M.; Mazzarini, F.; Bisson, M.; Pareschi, M.T.; Boschi, E. TINITALY/01: A new Triangular Ir-regular Network of Italy. Ann. Geophys. 2007, 50, 407–425. [Google Scholar] [CrossRef]
- Tarquini, S.; Vinci, S.; Favalli, M.; Doumaz, F.; Fornaciai, A.; Nannipieri, L. Release of a 10-m-resolution DEM for the Italian territory: Comparison with global-coverage DEMs and anaglyph-mode exploration via the web. Comput. Geo-Sci. 2012, 38, 168–170. [Google Scholar] [CrossRef]
- Fornaciai, A.; Favalli, M.; Karátson, D.; Tarquini, S.; Boschi, E. Morphometry of scoria cones, and their relation to geodynamic setting: A DEM-based analysis. J. Volcanol. Geoth. Res. 2012, 217–218, 56–72. [Google Scholar] [CrossRef]
- Mesa-Mingorance, J.L.; Ariza-López, F.J. Accuracy assessment of digital elevation models (DEMs): A critical review of practices of the past three decades. Remote Sens. 2020, 12, 2630. [Google Scholar] [CrossRef]
- ASPRS. Vertical Accuracy Reporting for LiDAR Data; ASPRS: Bethesda, MD, USA, 2015; pp. 1–20. [Google Scholar]
- Jordan, G.; Csillag, G.; Szucs, A.; Qvarfort, U. Application of Digital Terrain Modelling and GIS methods for the morphotectonic investigation of the Kali Basin, Hungary. Z. Geomorphol. 2003, 47, 145–169. [Google Scholar] [CrossRef]
- Goldsworthy, M.; Jackson, J. Active normal fault evolution in Greece revealed by geomorphology and drainage patterns. J. Geol. Soc. Lond. 2000, 157, 967–981. [Google Scholar] [CrossRef]
- Norini, G.; Groppelli, G.; Capra, L.; De Beni, E. Morphological analysis of Nevado de Toluca volcano (Mexico): New insights into the structure and evolution of an andesitic to dacitic stratovolcano. Geomorphology 2004, 62, 47–61. [Google Scholar] [CrossRef]
- Nicolas, J.-M.; Tupin, F. The Principles of DTM Reconstruction from SAR Images. In Microwave Remote Sensing of Land Surface; Elsevier: Amsterdam, The Netherlands, 2016; pp. 149–173. [Google Scholar] [CrossRef]
- Hengl, T. Finding the right pixel size. Comput. Geosci. 2006, 32, 1283–1298. [Google Scholar] [CrossRef]
- Wallace, R.E. Profiles and Ages of Young Fault Scarps, North-Central Nevada. Geol. Soc. Am. Bull. 1977, 89, 1267–1281. [Google Scholar] [CrossRef]
- Wallace, R.E.; Bonilla, M.G.; Villalobos, H.A.; Wallace, R.E. Faulting Related to the 1915 Earthquakes in Pleasant Valley, Nevada; U. S. Geological Survey; United States Government Printing Office: Washington, DC, USA, 1984; pp. 1–32.
- Hodge, M.; Biggs, J.; Fagereng Mdala, H.; Wedmore, L.N.J.; Williams, J.N. Evidence from High-Resolution Topography for Multiple Earthquakes on High Slip-to-Length Fault Scarps: The Bilila-Mtakataka Fault, Malawi. Tectonics 2020, 39, e2019TC005933. [Google Scholar] [CrossRef]
- Strak, V.; Dominguez, S.; Petit, C.; Meyer, B.; Loget, N. Interaction between normal fault slip and erosion on relief evolution: Insights from experimental modelling. Tectonophysics 2011, 513, 1–19. [Google Scholar] [CrossRef]
- Michetti, A.M.; Nappi, R.; Vezzoli, L.; Alessio, L.; Nave, R.; Silva-Fragoso, A.; Gropelli, G.; Norini, G.; Porfido, S. Understanding Holocene Fault Slip-Rates along the Casamicciola Terme. In Proceedings of the INQUA Conference, Rome, Italy, 13–20 July 2023. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight | Number of Strips | Area 1 Covered by Strips | Total Area 1 per Flight |
|---|---|---|---|
| 1 | 8 | 0.075 | 0.293 |
| 2 | 6 | 0.158 | 0.420 |
| 3 | 8 | 0.099 | 0.381 |
| 4 | 9 | 0.088 | 0.369 |
| 5 | 9 | 0.071 | 0.342 |
| Flight | 1st Flight | 2nd Flight | 3rd Flight | 4th Flight | 5th Flight | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| IS | SG | IS | SG | IS | SG | IS | SG | IS | SG | |
| Starting avg 3d mismatch: | 0.0309 | 0.0309 | 0.0386 | 0.0386 | 0.0313 | 0.0313 | 0.0391 | 0.0391 | 0.0483 | 0.0483 |
| Starting avg xy mismatch: | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Starting avg z mismatch: | 0.0309 | 0.0309 | 0.0386 | 0.0386 | 0.0313 | 0.0313 | 0.0391 | 0.0391 | 0.0483 | 0.0483 |
| Final avg 3d mismatch: | 0.0307 | 0.0235 | 0.0372 | 0.0243 | 0.0313 | 0.0313 | 0.0303 | 0.0305 | 0.0475 | 0.0388 |
| Final avg xy mismatch: | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| Final avg z mismatch | 0.0307 | 0.0235 | 0.0372 | 0.0243 | 0.0313 | 0.0313 | 0.0303 | 0.0305 | 0.0475 | 0.0388 |
| % correction | ||||||||||
| 3d mismatch: | 0.74 | 23.9 | 3.53 | 37.0 | 0.22 | 0.00 | 22.48 | 22.1 | 1.66 | 19.7 |
| xy mismatch: | 0.00 | 0.0 | 0.00 | 0.0 | 0.00 | 0.00 | 0.00 | 0.0 | 0.00 | 0.0 |
| z mismatch | 0.71 | 21.9 | 3.53 | 37.0 | 0.22 | 0.00 | 22.48 | 22.1 | 1.66 | 19.7 |
| RMSE between flight lines | 0.0420 | 0.0520 | 0.0440 | 0.0400 | 0.0690 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva-Fragoso, A.; Norini, G.; Nappi, R.; Groppelli, G.; Michetti, A.M. Improving the Accuracy of Digital Terrain Models Using Drone-Based LiDAR for the Morpho-Structural Analysis of Active Calderas: The Case of Ischia Island, Italy. Remote Sens. 2024, 16, 1899. https://doi.org/10.3390/rs16111899
Silva-Fragoso A, Norini G, Nappi R, Groppelli G, Michetti AM. Improving the Accuracy of Digital Terrain Models Using Drone-Based LiDAR for the Morpho-Structural Analysis of Active Calderas: The Case of Ischia Island, Italy. Remote Sensing. 2024; 16(11):1899. https://doi.org/10.3390/rs16111899
Chicago/Turabian StyleSilva-Fragoso, Argelia, Gianluca Norini, Rosa Nappi, Gianluca Groppelli, and Alessandro Maria Michetti. 2024. "Improving the Accuracy of Digital Terrain Models Using Drone-Based LiDAR for the Morpho-Structural Analysis of Active Calderas: The Case of Ischia Island, Italy" Remote Sensing 16, no. 11: 1899. https://doi.org/10.3390/rs16111899
APA StyleSilva-Fragoso, A., Norini, G., Nappi, R., Groppelli, G., & Michetti, A. M. (2024). Improving the Accuracy of Digital Terrain Models Using Drone-Based LiDAR for the Morpho-Structural Analysis of Active Calderas: The Case of Ischia Island, Italy. Remote Sensing, 16(11), 1899. https://doi.org/10.3390/rs16111899