
3D Point Cloud Shape Generation with Collaborative Learning of Generative Adversarial Network and Auto-Encoder


Abstract
1. Introduction
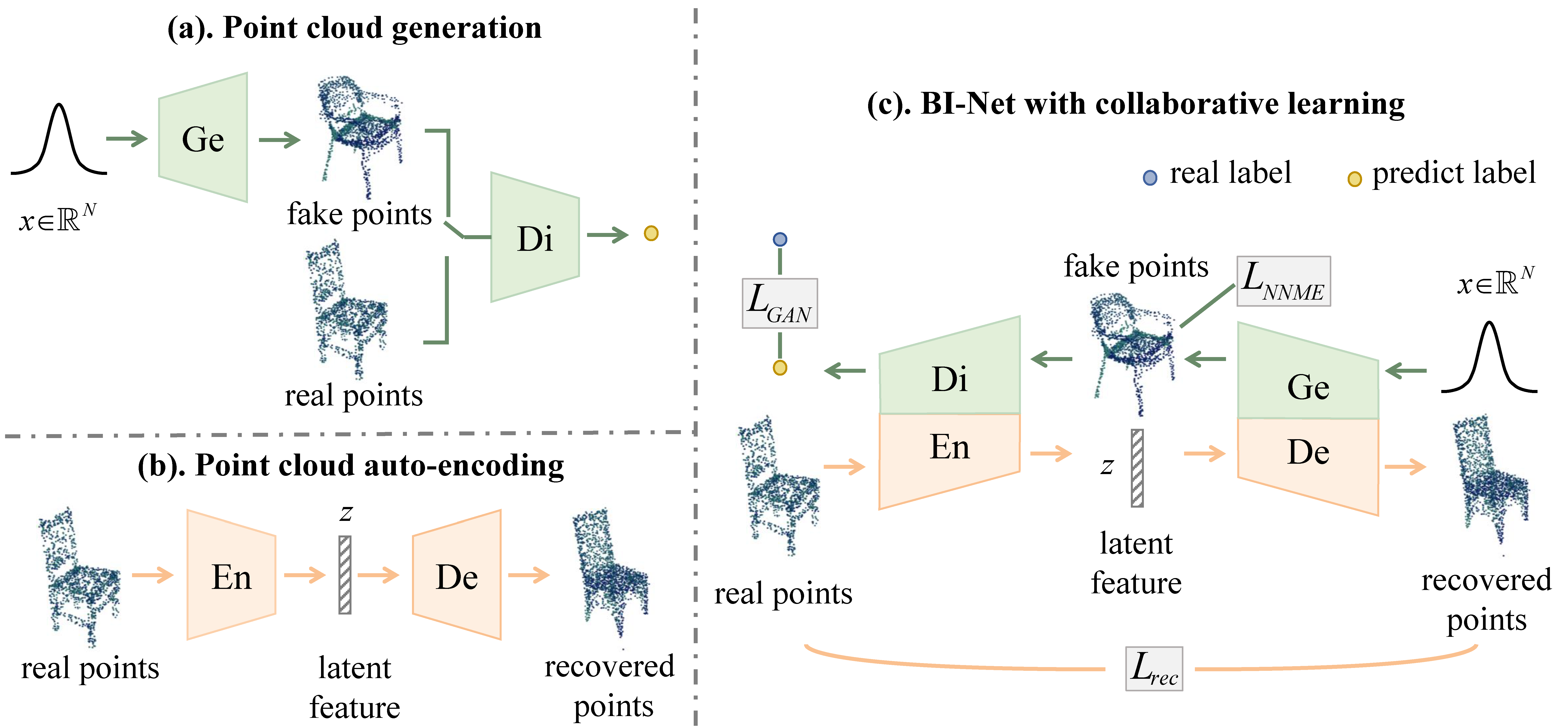
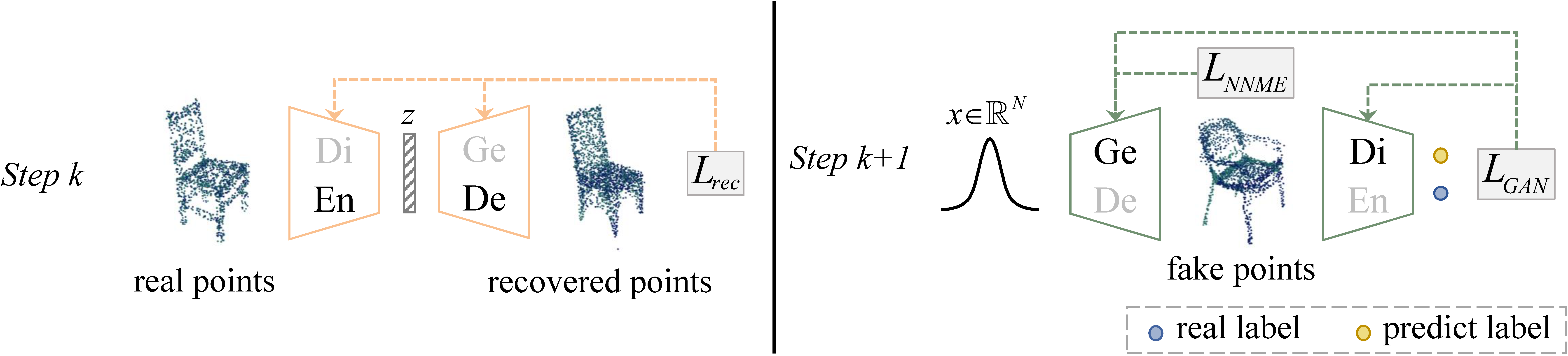
- To tackle the point cloud generation task, we propose a bidirectional network with collaborative learning in a novel point cloud generation and auto-encoding pipeline, and the collaborative learning of the GAN and AE brings more priors, in terms of parameters, into the BI-Net.
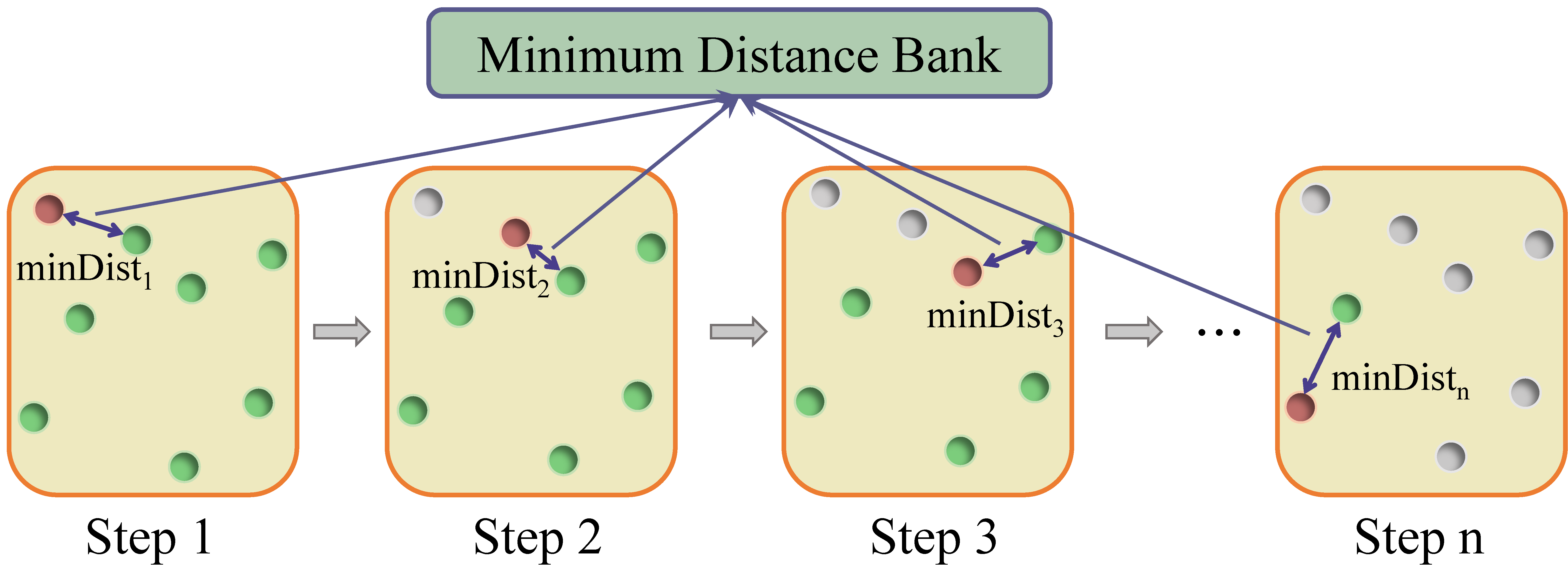
- We propose a nearest neighbor mutual exclusion loss, which minimizes the variance of the minimum distances to distribute points more uniformly.
- We conducted extensive experiments, including visual and quantitative experiments. The BI-Net shows an excellent generative ability in many categories of objects. The BI-Net produces competitive quantitative generation results compared to existing state-of-the-art methods.
2. Related Work
2.1. Generating 3D Data
2.2. Combination of GAN and AE
2.3. Point Distribution Uniformity Loss
3. Proposed Method
3.1. Method Overview
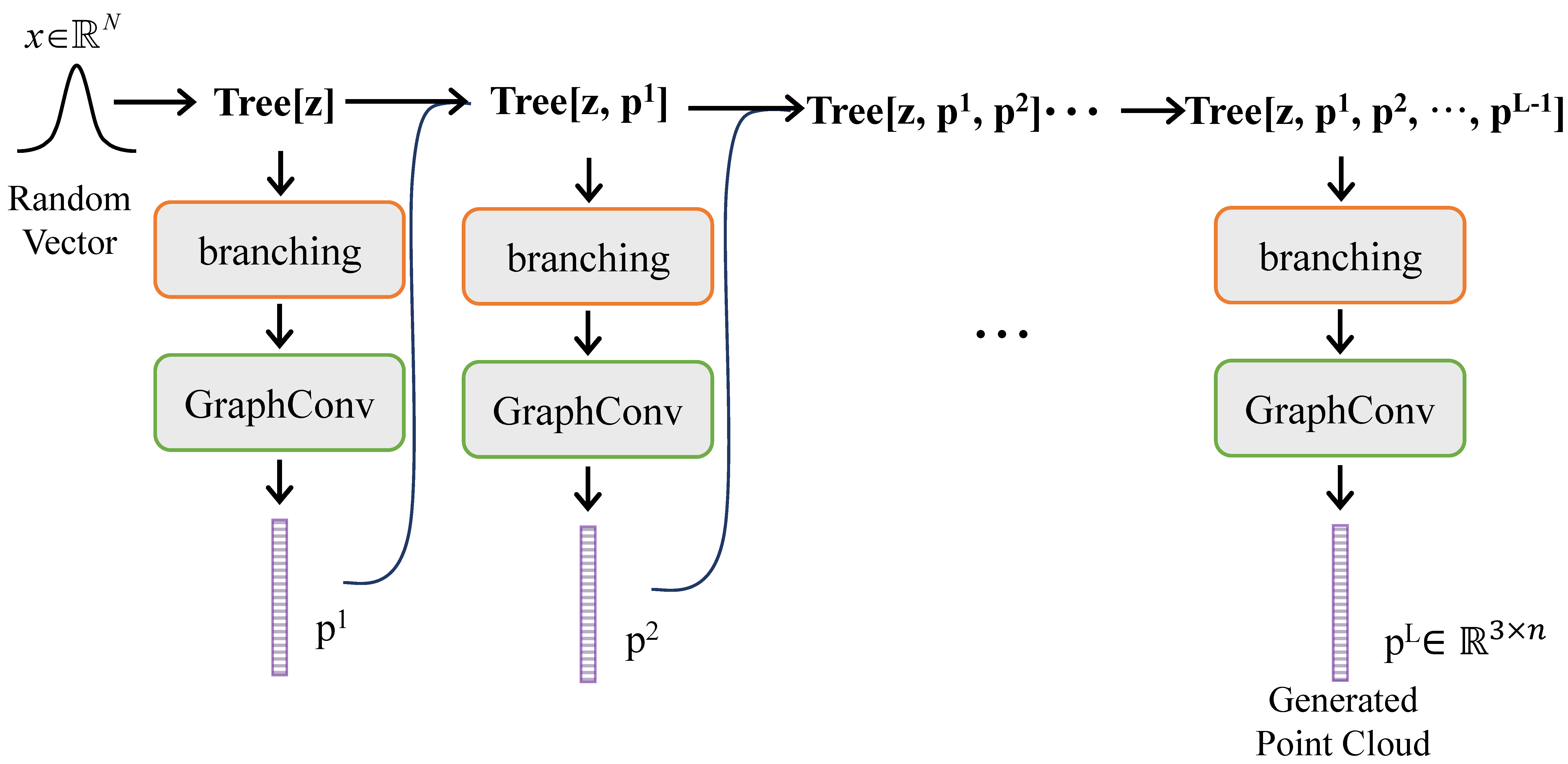
3.2. Network Architecture
3.3. Auto-Encoder Direction
3.4. GAN Direction
3.5. Nearest Neighbor Mutual Exclusion Loss
| Algorithm 1: The training pipeline of the BI-Net |
Input: For auto-encoder: batches of real point clouds ; For GAN: batches of noises . Output: For generator (decoder): batches of fake point clouds .
|
4. Experiments
4.1. Dataset and Evaluation Metrics
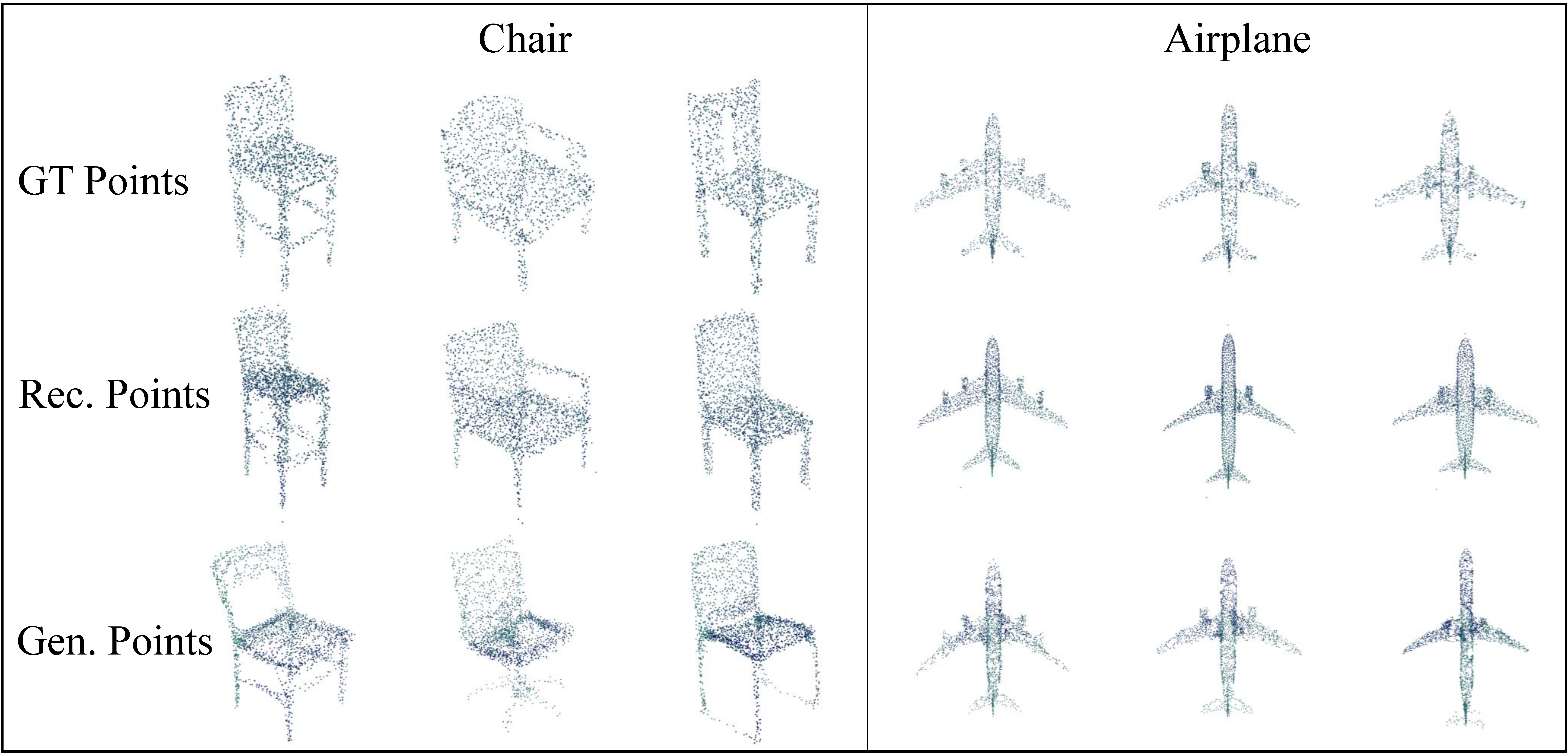
4.2. Visualization of Auto-Encoder
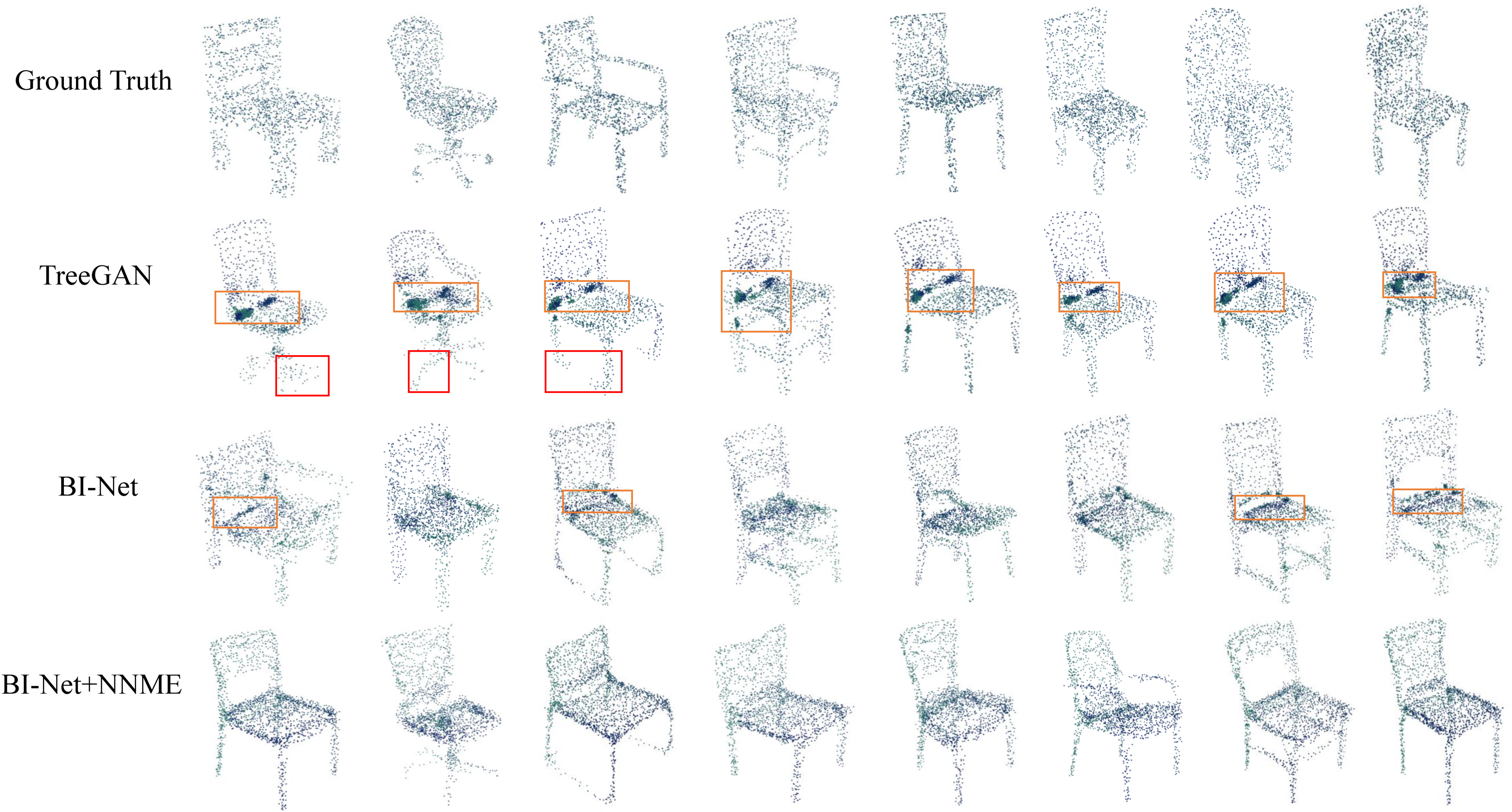
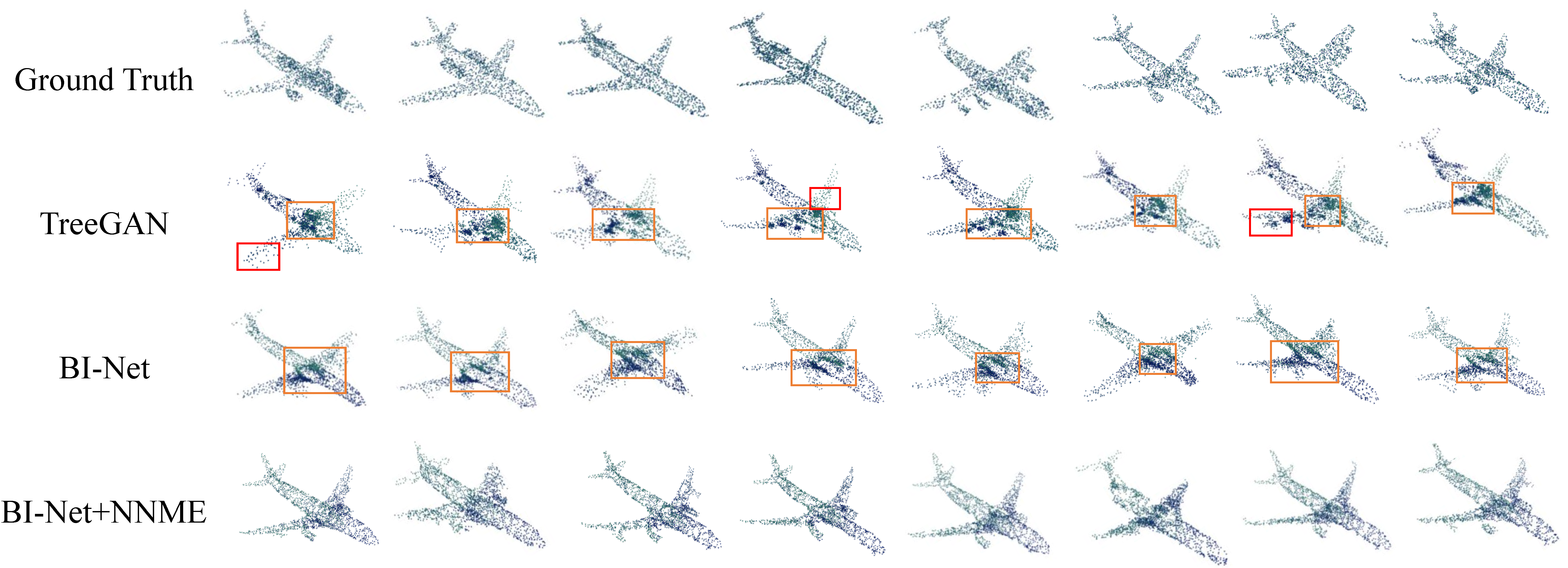
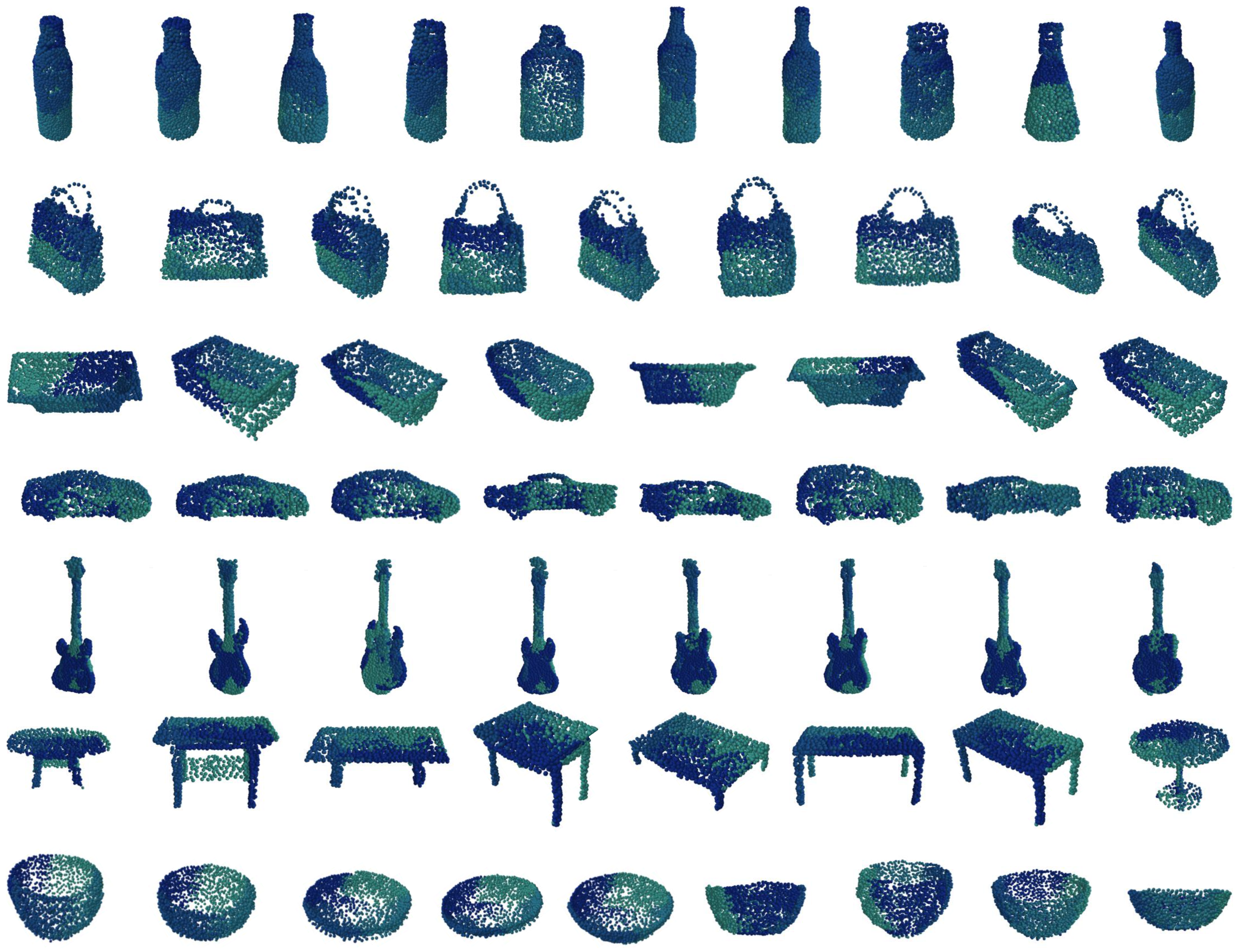
4.3. Visualization of Generation
4.4. Ablation Study
4.5. Evaluation of Generation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, J.; Zhang, C.; Xue, T.; Freeman, B.; Tenenbaum, J. Learning a probabilistic latent space of object shapes via 3D generative-adversarial modeling. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; Volume 29. [Google Scholar]
- Gao, J.; Chen, W.; Xiang, T.; Jacobson, A.; McGuire, M.; Fidler, S. Learning deformable tetrahedral meshes for 3D reconstruction. In Proceedings of the Advances in Neural Information Processing Systems, Virtual, 6–12 December 2020; Volume 33, pp. 9936–9947. [Google Scholar]
- Choy, C.B.; Xu, D.; Gwak, J.; Chen, K.; Savarese, S. 3d-r2n2: A unified approach for single and multi-view 3d object reconstruction. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 628–644. [Google Scholar]
- Li, Y.; Zhao, Z.; Fan, J.; Li, W. ADR-MVSNet: A cascade network for 3D point cloud reconstruction with pixel occlusion. Pattern Recognit. 2022, 125, 108516. [Google Scholar] [CrossRef]
- Zhang, Z.; Leng, S.; Zhang, L. Cross-domain point cloud completion for multi-class indoor incomplete objects via class-conditional GAN inversion. ISPRS J. Photogramm. Remote Sens. 2023, 206, 118–131. [Google Scholar] [CrossRef]
- Cheng, M.; Li, G.; Chen, Y.; Chen, J.; Wang, C.; Li, J. Dense Point Cloud Completion Based on Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Hao, R.; Wei, Z.; He, X.; Zhu, K.; Wang, J.; He, J.; Zhang, L. Multistage Adaptive Point-Growth Network for Dense Point Cloud Completion. Remote Sens. 2022, 14, 5214. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic graph cnn for learning on point clouds. ACM Trans. Graph. 2019, 38, 108524. [Google Scholar] [CrossRef]
- Qian, R.; Lai, X.; Li, X. BADet: Boundary-Aware 3D Object Detection from Point Clouds. Pattern Recognit. 2022, 125, 108524. [Google Scholar] [CrossRef]
- Yang, J.; Shi, S.; Wang, Z.; Li, H.; Qi, X. ST3D: Self-training for unsupervised domain adaptation on 3D object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021. [Google Scholar]
- Noh, J.; Lee, S.; Ham, B. HVPR: Hybrid voxel-point representation for single-stage 3D object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021. [Google Scholar]
- Feng, M.; Gilani, S.Z.; Wang, Y.; Zhang, L.; Mian, A. Relation graph network for 3D object detection in point clouds. IEEE Trans. Image Process. 2020, 30, 92–107. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Zhang, Y.; Luo, L.; Yang, K.; Xie, L. An End-to-End Point-Based Method and a New Dataset for Street-Level Point Cloud Change Detection. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5703015. [Google Scholar] [CrossRef]
- Wu, W.; Qi, Z.; Fuxin, L. Pointconv: Deep convolutional networks on 3D point clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 9621–9630. [Google Scholar]
- Liu, Y.; Cong, Y.; Sun, G.; Zhang, T.; Dong, J.; Liu, H. L3DOC: Lifelong 3D object classification. IEEE Trans. Image Process. 2021, 30, 7486–7498. [Google Scholar] [CrossRef] [PubMed]
- Qian, Y.; Hou, J.; Kwong, S.; He, Y. PUGeo-Net: A geometry-centric network for 3D point cloud upsampling. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 752–769. [Google Scholar]
- Qian, Y.; Hou, J.; Kwong, S.; He, Y. Deep Magnification-Flexible Upsampling Over 3D Point Clouds. IEEE Trans. Image Process. 2021, 30, 8354–8367. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.; Li, X.; Fu, C.W.; Cohen-Or, D.; Heng, P.A. Pu-net: Point cloud upsampling network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2790–2799. [Google Scholar]
- Li, R.; Li, X.; Fu, C.W.; Cohen-Or, D.; Heng, P.A. Pu-gan: A point cloud upsampling adversarial network. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 7203–7212. [Google Scholar]
- Li, T.; Lin, Y.; Cheng, B.; Ai, G.; Yang, J.; Fang, L. PU-CTG: A Point Cloud Upsampling Network Using Transformer Fusion and GRU Correction. Remote Sens. 2024, 16, 450. [Google Scholar] [CrossRef]
- Achlioptas, P.; Diamanti, O.; Mitliagkas, I.; Guibas, L. Learning representations and generative models for 3D point clouds. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 40–49. [Google Scholar]
- Valsesia, D.; Fracastoro, G.; Magli, E. Learning localized generative models for 3D point clouds via graph convolution. In Proceedings of the International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Shu, D.W.; Park, S.W.; Kwon, J. 3D point cloud generative adversarial network based on tree structured graph convolutions. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 3859–3868. [Google Scholar]
- Cai, R.; Yang, G.; Averbuch-Elor, H.; Hao, Z.; Belongie, S.; Snavely, N.; Hariharan, B. Learning gradient fields for shape generation. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 364–381. [Google Scholar]
- Sun, Y.; Yan, K.; Li, W. CycleGAN-Based SAR-Optical Image Fusion for Target Recognition. Remote Sens. 2023, 15, 5569. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, Y.; Liu, Z.; Siegel, J.; Sarma, S. Pointgrow: Autoregressively learned point cloud generation with self-attention. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Snowmass Village, CO, USA, 1–5 March 2020; pp. 61–70. [Google Scholar]
- Yang, G.; Huang, X.; Hao, Z.; Liu, M.Y.; Belongie, S.; Hariharan, B. Pointflow: 3D point cloud generation with continuous normalizing flows. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 4541–4550. [Google Scholar]
- Luo, S.; Hu, W. Diffusion probabilistic models for 3D point cloud generation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Yi, Z.; Chen, Z.; Cai, H.; Mao, W.; Gong, M.; Zhang, H. BSD-GAN: Branched Generative Adversarial Network for Scale-Disentangled Representation Learning and Image Synthesis. IEEE Trans. Image Process. 2020, 29, 9073–9083. [Google Scholar] [CrossRef] [PubMed]
- Isola, P.; Zhu, J.Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Karras, T.; Laine, S.; Aila, T. A style-based generator architecture for generative adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 4401–4410. [Google Scholar]
- Xu, W.; Keshmiri, S.; Wang, G. Adversarially Approximated Autoencoder for Image Generation and Manipulation. IEEE Trans. Multimed. 2019, 21, 2387–2396. [Google Scholar] [CrossRef]
- Pidhorskyi, S.; Adjeroh, D.A.; Doretto, G. Adversarial latent autoencoders. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 14104–14113. [Google Scholar]
- Chaurasiya, R.K.; Arvind, S.; Garg, S. Adversarial Auto-encoders for Image Generation from standard EEG features. In Proceedings of the 2020 First International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 3–5 January 2020; pp. 199–203. [Google Scholar]
- Rao, Y.; Lu, J.; Zhou, J. Global-local bidirectional reasoning for unsupervised representation learning of 3D point clouds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 5376–5385. [Google Scholar]
- Xie, C.; Wang, C.; Zhang, B.; Yang, H.; Chen, D.; Wen, F. Style-based point generator with adversarial rendering for point cloud completion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021. [Google Scholar]
- Huang, Z.; Yu, Y.; Xu, J.; Ni, F.; Le, X. Pf-net: Point fractal network for 3d point cloud completion. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 7662–7670. [Google Scholar]
- Fei, B.; Yang, W.; Ma, L.; Chen, W.M. DcTr: Noise-robust point cloud completion by dual-channel transformer with cross-attention. Pattern Recognit. 2023, 133, 109051. [Google Scholar] [CrossRef]
- Fan, H.; Su, H.; Guibas, L.J. A point set generation network for 3d object reconstruction from a single image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 605–613. [Google Scholar]
- Gal, R.; Bermano, A.; Zhang, H.; Cohen-Or, D. MRGAN: Multi-rooted 3D shape generation with unsupervised part disentanglement. arXiv 2020, arXiv:2007.12944. [Google Scholar]
- Kimura, T.; Matsubara, T.; Uehara, K. Topology-Aware Flow-Based Point Cloud Generation. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 7967–7982. [Google Scholar] [CrossRef]
- Li, S.; Liu, M.; Walder, C. EditVAE: Unsupervised Parts-Aware Controllable 3D Point Cloud Shape Generation. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 22 February–1 March 2022; Volume 36, pp. 1386–1394. [Google Scholar]
- Donahue, J.; Krähenbühl, P.; Darrell, T. Adversarial Feature Learning. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Li, H.; Pan, S.J.; Wang, S.; Kot, A.C. Domain generalization with adversarial feature learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5400–5409. [Google Scholar]
- Tran, N.T.; Bui, T.A.; Cheung, N.M. Dist-gan: An improved gan using distance constraints. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 370–385. [Google Scholar]
- An, D.; Guo, Y.; Zhang, M.; Qi, X.; Lei, N.; Gu, X. AE-OT-GAN: Training GANs from data specific latent distribution. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; pp. 548–564. [Google Scholar]
- Wen, Y.; Lin, J.; Chen, K.; Chen, C.P.; Jia, K. Geometry-aware generation of adversarial point clouds. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 2984–2999. [Google Scholar] [CrossRef] [PubMed]
- Adler, J.; Lunz, S. Banach wasserstein GAN. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 3–8 December 2018; Volume 31. [Google Scholar]
- Chang, A.X.; Funkhouser, T.; Guibas, L.; Hanrahan, P.; Huang, Q.; Li, Z.; Savarese, S.; Savva, M.; Song, S.; Su, H.; et al. ShapeNet: An Information-Rich 3D Model Repository. arXiv 2015, arXiv:1512.03012. [Google Scholar]
- Lopez-Paz, D.; Oquab, M. Revisiting Classifier Two-Sample Tests. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| COV (%, ↑) | MMD (↓) | |||||||
|---|---|---|---|---|---|---|---|---|
| Shape | TreeGAN | NNME | AE | CD | EMD | CD (%) | EMD (/10) | |
| Chair | ✓ | 38.02 | 6.77 | 1.494 | 3.613 | |||
| ✓ | ✓ | 45.00 | 35.00 | 0.823 | 1.486 | |||
| ✓ | ✓ | ✓ | 50.00 | 50.00 | 3.565 | 2.205 | ||
| ✓ | ✓ | 55.00 | 40.00 | 0.831 | 1.869 | |||
| ✓ | ✓ | ✓ | 60.00 | 50.00 | 0.543 | 1.114 | ||
| Airplane | ✓ | 39.37 | 8.40 | 0.432 | 1.953 | |||
| ✓ | ✓ | 45.00 | 45.00 | 0.295 | 1.037 | |||
| ✓ | ✓ | ✓ | 40.00 | 25.00 | 1.098 | 1.543 | ||
| ✓ | ✓ | 56.25 | 50.00 | 0.169 | 1.093 | |||
| ✓ | ✓ | ✓ | 60.00 | 65.00 | 0.294 | 0.845 | ||
| COV (%, ↑) | MMD (↓) | 1-NNA (%) | |||||
|---|---|---|---|---|---|---|---|
| Shape | Model | CD | EMD | CD (%) | EMD (/10) | CD | EMD |
| Chair | r-GAN | 46.23 | 22.14 | 1.345 | 3.104 | 69.67 | 100 |
| GCN | 39.84 | 35.09 | 1.535 | 2.213 | 77.86 | 95.8 | |
| TreeGAN | 38.02 | 6.77 | 1.494 | 3.613 | 74.92 | 100 | |
| ShapeGF | 48.53 | 46.71 | 1.318 | 1.785 | 56.17 | 62.69 | |
| DPM | 48.94 | 47.52 | 1.228 | 1.784 | 60.11 | 69.06 | |
| ChartPointFlow | - | - | - | - | - | 58.31 | |
| BI-Net | 55.00 | 40.00 | 0.831 | 1.869 | 70.00 | 97.50 | |
| BI-Net+NNME | 60.00 | 50.00 | 0.543 | 1.114 | 65.00 | 67.50 | |
| Airplane | r-GAN | 42.17 | 13.84 | 0.382 | 1.81 | 77.59 | 98.52 |
| GCN | 39.04 | 18.62 | 0.471 | 1.65 | 89.13 | 98.6 | |
| TreeGAN | 39.37 | 8.4 | 0.432 | 1.953 | 83.86 | 99.67 | |
| ShapeGF | 46.79 | 44.98 | 0.373 | 1.061 | 62.69 | 71.91 | |
| DPM | 48.71 | 45.47 | 0.328 | 1.061 | 64.83 | 75.12 | |
| ChartPointFlow | - | - | - | - | - | 65.08 | |
| BI-Net | 56.25 | 50.00 | 0.169 | 1.093 | 65.63 | 93.75 | |
| BI-Net+NNME | 60.00 | 65.00 | 0.294 | 0.845 | 60.00 | 70.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.; Wang, J.; Yang, X. 3D Point Cloud Shape Generation with Collaborative Learning of Generative Adversarial Network and Auto-Encoder. Remote Sens. 2024, 16, 1772. https://doi.org/10.3390/rs16101772
Yang D, Wang J, Yang X. 3D Point Cloud Shape Generation with Collaborative Learning of Generative Adversarial Network and Auto-Encoder. Remote Sensing. 2024; 16(10):1772. https://doi.org/10.3390/rs16101772
Chicago/Turabian StyleYang, Dong, Jingyuan Wang, and Xi Yang. 2024. "3D Point Cloud Shape Generation with Collaborative Learning of Generative Adversarial Network and Auto-Encoder" Remote Sensing 16, no. 10: 1772. https://doi.org/10.3390/rs16101772
APA StyleYang, D., Wang, J., & Yang, X. (2024). 3D Point Cloud Shape Generation with Collaborative Learning of Generative Adversarial Network and Auto-Encoder. Remote Sensing, 16(10), 1772. https://doi.org/10.3390/rs16101772